i
BAHAN AJAR
Tahun Ke 1 Dari Rencana 2 Tahun
KETUA TIM
Nur Wakhidah, S.Kom., M.Cs. NIDN : 0626047901
ANGGOTA TIM
Susanto, S.Kom., M.Kom. NIDN : 0621027601
Astrid Novita Putri, S. Kom., M. Kom. NIDN : 0605119001 Siti Asmiatun, S. Kom., M. Kom. NIDN : 0625029101
UNIVERSITAS SEMARANG
SEPTEMBER 2018
2
Modul 1
Jurusan : Teknologi Informasi
Program Studi : S1 Teknik Informatika
Matakuliah : Kecerdasan Buatan
SKS : 4 (2 – 2)
Pertemuan ke- : 1
Jumlah Halaman : 7
Pembahasan : Pengenalan Kecerdasan Buatan
Pengajar : 1. Astrid Novita Putri, S. Kom., M. Kom.
2. Nur Wakhidah, S.Kom., M.Cs. 3. Siti Asmiatun, S. Kom., M. Kom. 4. Susanto, S.Kom., M.Kom.
A. Judul Modul
Pengenalan Kecerdasan Buatan dan aplikasi kecerdasan buatan.
B. Kompetensi Dasar
Pada pertemuan ini akan dibahas mengenai Kecerdasan buatan mulai dari pengertian, perbedaan kecerdasan buatan dan alami, dan sejarah kecerdasan buatan sehingga mahasiswa memahami konsep dasar dari Kecerdasan Buatan.
C. Materi Modul
Kecerdasan buatan (Artificial Intelligence) : Bagian dari ilmu komputer
yang mempelajari bagaimana membuat mesin (komputer) dapat melakukan pekerjaan seperti dan sebaik yang dilakukan oleh manusia bahkan bisa lebih baik daripada yang dilakukan manusia.
Menurut John McCarthy, 1956, AI : Untuk mengetahui dan memodelkan proses – proses berpikir manusia dan mendesain mesin agar dapat menirukan perilaku manusia.
1. Cerdas = memiliki pengetahuan + pengalaman, penalaran (bagaimana membuat keputusan & mengambil tindakan), moral yang baik, agar mesin
3
bisa cerdas (bertindak seperti & sebaik manusia) maka harus diberi bekal pengetahuan & mempunyai kemampuan untuk menalar.
2 Bagian utama yang dibutuhkan untuk aplikasi kecerdasan buatan :
a. Basis pengetahuan (knowledge base): berisi fakta-fakta, teori, pemikiran dan hubungan antara satu dengan lainnya.
b. Motor inferensi (inference engine) : kemampuan menarik kesimpulan berdasarkan pengetahuan.
Gambar 1. Proses Kecerdasan Buatan
Di dalam Gambar 1, diawali dengan adanya permasalahan, pertanyaan atau input yang akan membentuk basis pengetahuan. Basis pengetahuan akan mengumpulkan banyak pengetahuan yang berkaitan dengan masalah atau pertanyaan. Sedangkan output atau keluarannya adalah jawaban dari basis pengetahuan yang telah diolah menjadi informasi.
a) BEDA KECERDASAN BUATAN & KECERDASAN ALAMI Kelebihan kecerdasan buatan :
1. Lebih bersifat permanen. Kecerdasan alami bisa berubah karena sifat manusia pelupa. Kecerdasan buatan tidak berubah selama sistem komputer & program tidak mengubahnya.
2. Lebih mudah diduplikasi & disebarkan. Mentransfer pengetahuan manusia dari 1 orang ke orang lain membutuhkan proses yang sangat lama & keahlian tidak akan pernah dapat diduplikasi dengan lengkap.Jadi jika pengetahuan terletak pada suatu sistem komputer,
4
pengetahuan tersebut dapat disalin dari komputer tersebut & dapat dipindahkan dengan mudah ke komputer yang lain. 3. Lebih murah. Menyediakan layanan komputer akan lebih
mudah & murah dibandingkan mendatangkan seseorang untuk mengerjakan sejumlah pekerjaan dalam jangka waktu yang sangat lama.
4. Bersifat konsisten dan teliti karena kecerdasan buatan adalah bagian dari teknologi komputer sedangkan kecerdasan alami senantiasa berubah-ubah
2. Dapat didokumentasi.Keputusan yang dibuat komputer dapat didokumentasi dengan mudah dengan cara melacak setiap aktivitas dari sistem tersebut. Kecerdasan alami sangat sulit untuk direproduksi.
3. Dapat mengerjakan beberapa task lebih cepat dan lebih baik dibanding manusia
Kelebihan kecerdasan alami :
1. Kreatif : manusia memiliki kemampuan untuk menambah pengetahuan, sedangkan pada kecerdasan buatan untuk menambah pengetahuan harus dilakukan melalui sistem yang dibangun.
2. Memungkinkan orang untuk menggunakan pengalaman atau pembelajaran secara langsung. Sedangkan pada kecerdasan buatan harus mendapat masukan berupa input-input simbolik. 3. Pemikiran manusia dapat digunakan secara luas, sedangkan
5
b) BEDA KECERDASAN BUATAN dan PROGRAM KONVENSIONAL
Tabel 1. Perbedaan Antara Kecerdasan Buatan dan Program Konvensional
Program kecerdasan buatan dapat ditulis dalam semua bahasa komputer, baik dalam bahasa C, Pascal, Basic, dan bahasa pemrograman lainnya. Tetapi dalam perkembangan selanjutnya, dikembangkan bahasa pemrograman yang khusus untuk aplikasi kecerdasan buatan yaitu LISP dan PROLOG.
c) SEJARAH KECERDASAN BUATAN
Tahun 1950 – an Alan Turing, seorang pionir AI dan ahli matematika Inggris melakukan percobaan Turing (Turing Test) yaitu sebuah komputer melalui terminalnya ditempatkan pada jarak jauh. Di ujung yang satu ada terminal dengan software AI dan diujung lain ada sebuah terminal dengan seorang operator. Operator itu tidak mengetahui kalau di ujung terminal lain dipasang software AI. Mereka berkomunikasi dimana terminal di ujung memberikan respon terhadap serangkaian pertanyaan yang diajukan oleh operator. Dan sang operator itu mengira bahwa ia sedang berkomunikasi dengan operator lainnya yang berada pada terminal lain. Turing beranggapan bahwa jika mesin dapat membuat seseorang percaya bahwa dirinya mampu berkomunikasi dengan orang lain, maka dapat dikatakan bahwa mesin tersebut cerdas (seperti layaknya manusia).
6
d) KECERDASAN BUATAN PADA APLIKASI KOMERSIAL
Lingkup utama kecerdasan buatan :
1. Sistem pakar (expert system) : komputer sebagai sarana untuk menyimpan pengetahuan para pakar sehingga komputer memiliki keahlian menyelesaikan permasalahan dengan meniru keahlian yang dimiliki pakar.
2. Pengolahan bahasa alami (natural language processing) : user dapat berkomunikasi dengan komputer menggunakan bahasa sehari-hari, misal bahasa inggris, bahasa indonesia, bahasa jawa, dll, contoh : - pengguna sistem dapat memberikan perintah dengan bahasa sehari-hari, misalnya, untuk menghapus semua file, pengguna cukup memberikan perintah ”komputer, tolong hapus semua file !” maka sistem akan mentranslasikan perintah bahasa alami tersebut menjadi perintah bahasa formal yang dipahami oleh komputer, yaitu ”delete *.* <ENTER>”. - Translator bahasa inggris ke bahasa indonesia begitu juga sebaliknya,dll, tetapi sistem ini tidak hanya sekedar kamus yang menerjemahkan kata per kata, tetapi juga mentranslasikan sintaks dari bahasa asal ke bahasa tujuan - Text summarization : suatu sistem yang dapat membuat ringkasan hal-hal penting dari suatu wacana yang diberikan.
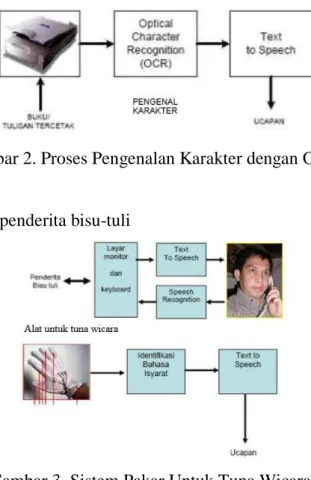
3. Pengenalan ucapan (speech recognition) : manusia dapat berkomunikasi dengan komputer menggunakan suara. Contoh : - memberikan instruksi ke komputer dengan suara - alat bantu membaca untuk tunanetra, mempunyai masukan berupa teks tercetak (misalnya buku) dan mempunyai keluaran berupa ucapan dari teks tercetak yang diberikan.
7
Gambar 2. Proses Pengenalan Karakter dengan OCR
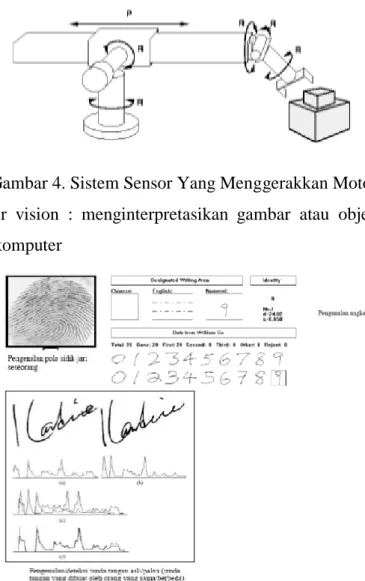
- Telpon untuk penderita bisu-tuli
Gambar 3. Sistem Pakar Untuk Tuna Wicara
Sistem pakar untuk tuna wicara seperti yang terlihat di Gambar 3, akan menterjemahkan suara menjadi bahasa isyarat yang bisa dipahami oleh tuna wicara.
- konversi dari SMS (Short Message System) ke ucapan sehingga pesan SMS dapat didengar. Dengan demikian memungkinkan untuk mendengar pesan SMS sambil melakukan aktivitas yang menyulitkan untuk membacanya, seperti mengendarai mobil.
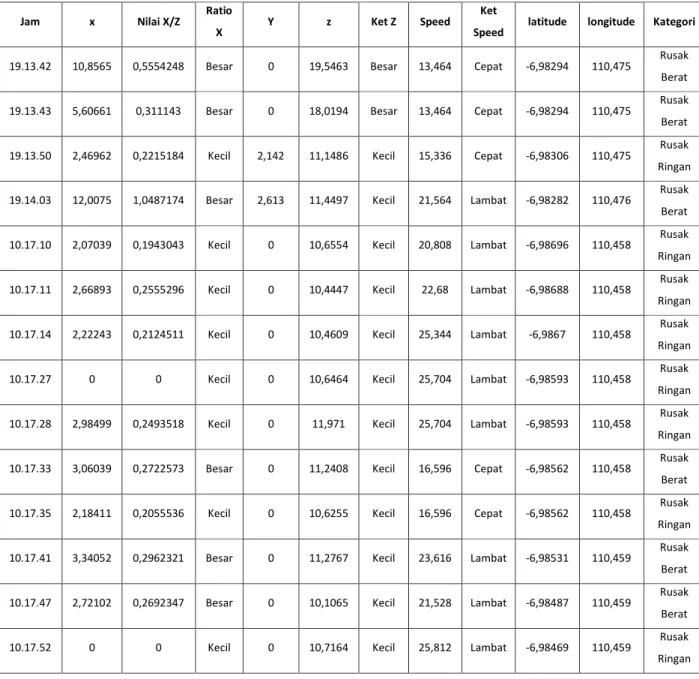
4. Robotika dan sistem sensor - Sistem sensor pada mesin cuci yaitu menggunakan sensor optik, mengeluarkan cahaya ke air dan mengukur bagaimana cahaya tersebut sampai ke ujung lainnya. Makin kotor, maka sinar yang sampai makin redup. Sistem juga mampu menentukan jenis kotoran tersebut daki/minyak.Sistem juga bisa menentukan putaran yang tepat secara otomatis berdasarkan jenis dan banyaknya kotoran serta jumlah yang akan dicuci, seperti yang terlihat di Gambar 4.
8
Gambar 4. Sistem Sensor Yang Menggerakkan Motor
5. Computer vision : menginterpretasikan gambar atau objek-objek tampak melalui komputer
Gambar 5. Contoh Implementasi Computer Vision
6. Intelligent computer-aided instruction : komputer dapat digunakan sebagai tutor yang dapat melatih dan mengajar, contoh pada gambar 6, sistem pakar untuk belajar bahasa inggris.
9
Gambar 7. Sistem Pakar Untuk Belajar Bahasa Inggris
7. Game playing 1997, seperti gambar 8, Deep Blue mengalahkan Garry Kasparov, the World Chess Champion Deep Blue chess machine menggunakan komputer IBM, dibuat tahun 1990-an oleh Hsu, Campbell, Tan, Hoane, Brody, Benjamin.Deep Blue mampu mengevaluasi 200juta posisi bidak catur /detik
Gambar 8. Contoh Game Playing
D. Evaluasi
1) Sebutkan dan jelaskan apakah kecerdasan buatan!
2) Berikan penjelasan perbedaan kecerdasan buatan dan alami!
3) Berikan contoh jenis aplikasi kecerdasan buatan, dan berikan contoh kegunaan dari aplikasi tersebut!
10
Modul 2
Jurusan : Teknologi Informasi
Program Studi : S1 Teknik Informatika
Matakuliah : Kecerdasan Buatan
SKS : 4 (2 – 2)
Pertemuan ke- : 2
Jumlah Halaman : 7
Pembahasan : Teori Kecerdasan Buatan Ketidakpastian
Pengajar : 1. Astrid Novita Putri, S. Kom., M. Kom.
2. Nur Wakhidah, S.Kom., M.Cs. 3. Siti Asmiatun, S. Kom., M. Kom. 4. Susanto, S.Kom., M.Kom.
A. TEORI KECERDASAN BUATAN KETIDAKPASTIAN
Dalam kenyataan sehari-hari banyak masalah didunia ini tidak dapat dimodelkan secara lengkap dan konsisten. Suatu penalaran dimana adanya penambahan fakta baru mengakibatkan ketidakkonsistenan, dengan ciri-ciri penalaran sebagai berikut :
- adanya ketidakpastian
- adanya perubahan pada pengetahuan
- adanya penambahan fakta baru dapat mengubah konklusi yang sudah terbentuk contoh :
Premis -1 : Aljabar adalah pelajaran yang sulit Premis -2 : Geometri adalah pelajaran yang sulit Premis -3 : Kalkulus adalah pelajaran yang sulit Konklusi : Matematika adalah pelajaran yang sulit Munculnya premis baru bisa mengakibatkan gugurnya konklusi yang sudah diperoleh, misal :
Premis -4 : Kinematika adalah pelajaran yang sulit Premis tersebut menyebabkan konklusi :
11
“Matematika adalah pelajaran yang sulit”, menjadi salah, karena Kinematika bukan merupakan bagian dari Matematika, sehingga bila menggunakan penalaran induktif sangat dimungkinkan adanya ketidakpastian.Untuk mengatasi ketidakpastian maka digunakan penalaran statistik.
B. NAIVE BAYES
Naïve Bayes merupakan pengklasifikasian dengan metode probabilitas
dan statistik yang dikemukakan oleh ilmuwan Inggris Thomas Bayes. Menurut Olson dan Delen (2008, p102) menjelaskan Naïve bayes untuk setiap kelas keputusan, menghitung probabilitas dengan syarat bahwa kelas keputusan adalah benar, mengingat vektor informasi obyek.
Sedangkan menurut Han dan Kamber (2011, p351) Proses dari The Naïve
Bayesian classifier, atau Simple Bayesian Classifier, sebagai berikut:
(Andriani, 2012)
1. Variable D menjadi pelatihan set tuple dan label yang terkait dengan kelas. Seperti biasa, setiap tuple diwakili oleh vektor atribut n dimensi, X = (x1, x2, ..., xn), ini menggambarkan pengukuran n dibuat pada tuple dari atribut n, masing-masing, A1, A2, ..., An.
2. Misalkan ada kelas m, C1, C2, ..., Cm. Diberi sebuah tuple, X, classifier akan memprediksi X yang masuk kelompok memiliki probabilitas
posterior tertinggi, kondisi-disebutkan pada X. Artinya, classifier naive
bayesian memprediksi bahwa X tuple milik kelas Ci jika dan hanya jika:
Gambar 1. Rumus Classifier Naïve Bayesian Sumber: Han dan Kamber (2011, p351) Keterangan :
P(Ci|X) = Probabilitas hipotesis Ci jika diberikan fakta atau record X (Posterior probability)
P(X|Ci) = mencari nilai parameter yang memberi kemungkinan yang paling besar (likelihood)
12
P(Ci) = Prior probability dari X (Prior probability) P(X) = Jumlah probability tuple yg muncul
C. ANALISA PERHITUNGAN METODE NAIVE BAYESIAN
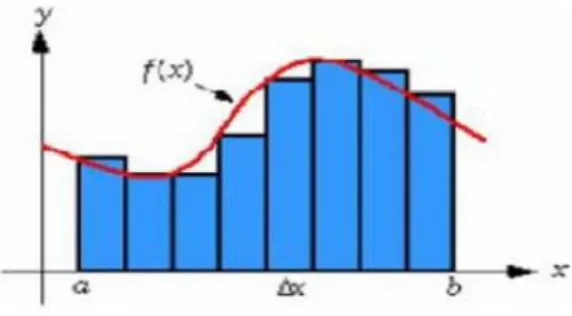
Berikut ini adalah tabel traning data jalan rusak menggunakan sensor accelerometer adalah di bawah ini:
Tabel 2 Tabel Traning Jalan Rusak
Jam x Nilai X/Z Ratio
X Y z Ket Z Speed
Ket
Speed latitude longitude Kategori
19.13.42 10,8565 0,5554248 Besar 0 19,5463 Besar 13,464 Cepat -6,98294 110,475 Rusak Berat 19.13.43 5,60661 0,311143 Besar 0 18,0194 Besar 13,464 Cepat -6,98294 110,475 Rusak Berat 19.13.50 2,46962 0,2215184 Kecil 2,142 11,1486 Kecil 15,336 Cepat -6,98306 110,475 Rusak Ringan 19.14.03 12,0075 1,0487174 Besar 2,613 11,4497 Kecil 21,564 Lambat -6,98282 110,476 Rusak Berat 10.17.10 2,07039 0,1943043 Kecil 0 10,6554 Kecil 20,808 Lambat -6,98696 110,458 Rusak Ringan 10.17.11 2,66893 0,2555296 Kecil 0 10,4447 Kecil 22,68 Lambat -6,98688 110,458 Rusak Ringan 10.17.14 2,22243 0,2124511 Kecil 0 10,4609 Kecil 25,344 Lambat -6,9867 110,458 Rusak Ringan 10.17.27 0 0 Kecil 0 10,6464 Kecil 25,704 Lambat -6,98593 110,458 Rusak Ringan 10.17.28 2,98499 0,2493518 Kecil 0 11,971 Kecil 25,704 Lambat -6,98593 110,458 Rusak Ringan 10.17.33 3,06039 0,2722573 Besar 0 11,2408 Kecil 16,596 Cepat -6,98562 110,458 Rusak Berat 10.17.35 2,18411 0,2055536 Kecil 0 10,6255 Kecil 16,596 Cepat -6,98562 110,458 Rusak Ringan 10.17.41 3,34052 0,2962321 Besar 0 11,2767 Kecil 23,616 Lambat -6,98531 110,459 Rusak Berat 10.17.47 2,72102 0,2692347 Besar 0 10,1065 Kecil 21,528 Lambat -6,98487 110,459 Rusak Berat 10.17.52 0 0 Kecil 0 10,7164 Kecil 25,812 Lambat -6,98469 110,459 Rusak Ringan
13
10.17.55 2,78326 0,2430476 Kecil 0 11,4515 Kecil 24,3 Lambat -6,9845 110,459 Rusak Ringan 10.17.57 2,55461 0,2309523 Kecil 0 11,0612 Kecil 21,78 Lambat -6,98435 110,459 Rusak Ringan 10.18.01 3,15137 0,2019798 Kecil 0 15,6024 Besar 28,008 Lambat -6,98416 110,459 Rusak Berat 10.18.19 5,79337 0,2301998 Kecil 0 25,1667 Besar 17,208 Cepat -6,98346 110,459 Rusak Berat 10.18.21 2,61687 0,1467909 Kecil 0 17,8272 Besar 15,192 Cepat -6,98336 110,459 Rusak Berat 10.18.22 0 0 Kecil 0 10,9744 Kecil 15,192 Cepat -6,98336 110,459 Rusak Ringan 10.18.44 2,65756 0,2459975 Kecil 0 10,8032 Kecil 26,136 Lambat -6,98174 110,46 Rusak Ringan 10.18.49 5,30138 0,4158239 Besar 3,62183 12,7491 Kecil 16,164 Cepat -6,98146 110,46 Rusak Ringan 10.18.53 2,85989 0,2458217 Kecil 0 11,634 Kecil 22,536 Lambat -6,98114 110,46 Rusak Ringan 10.18.55 0 0 Kecil 0 13,6613 Kecil 22,536 Lambat -6,98114 110,46 Rusak Ringan 10.18.56 3,60568 0,2601388 Besar 0 13,8606 Kecil 22,536 Lambat -6,98114 110,46 Rusak Berat 10.18.57 0 0 Kecil 0 12,1542 Kecil 20,52 Lambat -6,98105 110,46 Rusak Ringan 10.18.58 2,50974 0,1700274 Kecil 0 14,7608 Kecil 20,52 Lambat -6,98105 110,46 Rusak Ringan 10.19.19 0 0 Kecil 0 12,4768 Kecil 15,372 Cepat -6,98014 110,46 Rusak Ringan 10.19.22 3,2178 0,2661913 Besar 0 12,0883 Kecil 23,328 Lambat -6,97997 110,46 Rusak Berat
10.19.25 3,35 0,2233333 Kecil 0 15 Kecil 25 Lambat -6,97997 110,46 ?
Kemudian Bagaimana Cara Menghitung No 30, Kategori Hasil Apakah Yang Akan di Dapatkan Dalam Hasil Kategori?
Perhitungan Naive Bayesian :
a. Tahap 1 Menghitung jumlah class/label (Kategori)
P(Rusak Berat) = 11/29 P(Rusak Ringan) = 18/29
14
b. Tahap 2 :
Menghitung Jumlah Untuk Masalah Sama dengan Class Yang Sama (Berdasarkan : Speed)
P(Lambat\Rusak Ringan) = 13/19 P(Lambat\Rusak Berat) = 6/19
Menghitung Jumlah Untuk Masalah Sama dengan Class Yang Sama (Berdasarkan : Ratio X)
P(Kecil\Rusak Ringan) = 16 /16 P(Kecil\Rusak Berat) = 0 / 16
Menghitung Jumlah Untuk Masalah Sama dengan Class Yang Sama (Berdasarkan : Ratio Z)
P(Kecil\Rusak Ringan) = 18/24 P(Kecil\Rusak Berat) = 6/24
c. Tahap 3 Mengkalikan Semua Variabel Rusak Ringan dan Rusak Berat Klasifikasi Bayes Untuk Kategori : Rusak Berat
= P(Rusak Berat). P(Lambat\ Rusak Berat). P(Kecil\ Rusak Berat). P(Kecil\Rusak Berat) = 11/29 *6/19* 0/16* 6/24
= 0,379 *0,315 * 0*0,25 = 0
Klasifikasi Bayes Untuk Kategori : Rusak Ringan
= P(Rusak Ringan). P(Lambat\Rusak Ringan). P(Kecil\Rusak Ringan). P(Kecil\Rusak Ringan) = 18/29 * 13/19 * 16/16 * 18/24
= 0,62* 0,68* 1*0,75 = 0,3162
15
Dari hasil perhitungan di atas, maka klasifikasi Bayes untuk jalan rusak dari
record 30 yang di peroleh adalah “Rusak Ringan” dengan nilai 0,3162
dibandingkan dengan kategori yang rusak berat.
D. Evaluasi
1. Jelaskan ciri -ciri kecerdasan buatan ketidakpastian! 2. Menurut anda metode naive bayes menurut anda?
3. Bagaimana Cara Menghitung No 31, dari contoh soal di atas, kemudian hasil apakah yang akan didapat dari kategori dibawah ini?
Jam x Nilai X/Z Ratio
X Y z Ket Z Speed
Ket
Speed latitude longitude Kategori
16
Modul 3
Jurusan : Teknologi Informasi
Program Studi : S1 Teknik Informatika
Matakuliah : Kecerdasan Buatan
SKS : 4 (2 – 2)
Pertemuan ke- : 3
Jumlah Halaman : 4
Pembahasan :Penerapan Alghoritma Pothole dan Sensor Accelometer
Pengajar : 1. Astrid Novita Putri, S. Kom., M. Kom.
2. Nur Wakhidah, S.Kom., M.Cs. 3. Siti Asmiatun, S. Kom., M. Kom. 4. Susanto, S.Kom., M.Kom.
1. Pengertian Sensor Accelometers
Percepatan merupakan suatu keadaan berubahnya kecepatan terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration). Jika kecepatan semakin berkurang daripada kecepatan sebelumnya, disebut deceleration. (M.K.P Kumar dkk, 2012)
Bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula. Untuk memperoleh data jarak dari sensor accelerometer, diperlukan proses integral ganda terhadap keluaran sensor.
s = (∫( ∫(𝑎𝑎) dt)dt ... (M.K.P Kumar dkk, 2012) Proses penghitungan ini dipengaruhi oleh waktu cuplik data, sehingga jeda waktu cuplik data (dt) harus selalu konstan dan dibuat sekecil mungkin Secara sederhana, integral merupakan luas daerah di bawah suatu sinyal selama rentang waktu tertentu.
17
Gambar 1 Pengintegralan sederhana terhadap suatu sinyal
Accelerometer adalah sebuah perangkat yang mampu mengukur sebuah
kekuatan akselerasi. Kekuatan ini mungkin statis (diam) seperti halnya kekuatan konstan dari gravitasi Bumi, atau bisa juga bersifat dinamis karena gerakan atau getaran dari sebuah alat akselerometer.
Gambar 2 sensor accelerometer
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk mengukur getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan kecepatan dengan ataupun tanpa pengaruh gravitasi bumi.
18
2. Penerapan Data Accelometer Pada Jalan Rusak
Data akselerometer yang merepresentasikan nilai percepatan sumbu X,Y, dan Z, serta informasi GPS yang memberikan informasi lokasi (latitude dan longitude), kecepatan, dan arah. Bahan yang digunakan untuk penelitian ini terdiri jadi tiga jenis diantaranya:
1. Data Training, yaitu bahan penelitian berupa data jalan dimana data kerusakan jalan dicatat secara manual. Data ini digunakan sebagai data pembanding sistem untuk menghasilkan nilai akurasi yang tinggi.
2. Data mentah, yaitu bahan penelitian berupa data jalan hasil perekaman aplikasi secara bebas tanpa mencatat setiap kerusakan yang dilaluinya.
3. Alghoritma Pothole Patrol
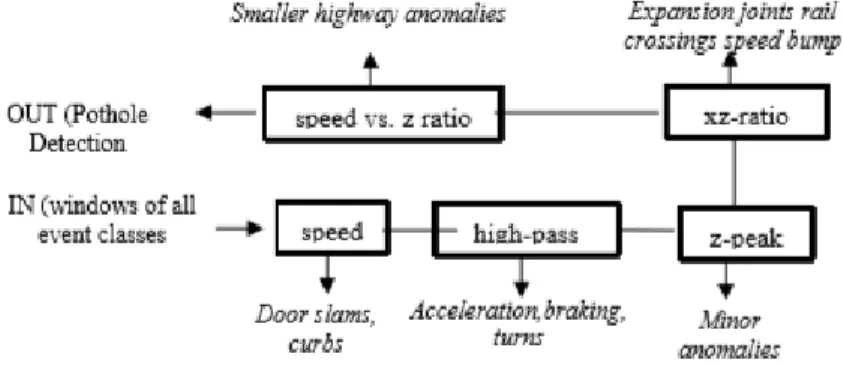
Berikut ini adalah tahapan penerapan algoritma pothole patrol yang dihasilkan dari sensor accelometer dan data percepatan yang dapat mendeteksi anomali permukaan jalan seperti lubang, trotoar, sistem kereta api. Kemudian perilaku pengendara dengan kecepatan dan variabel yang di butuhkan dalam data tergambarkan pada gambar 4 di bawah ini :
Gambar 4 Tahapan Penerapan algoritma Uraian berikut tentang tahapan gambar 4 di atas adalah :
a. Kecepatan: ini adalah tahap yang mencatat percepatan data sesuai dengan kecepatan, jika kecepatannya nol atau kendaraan berjalan lambat maka data tidak dicatat.
19
b. High Pass: high pass akan menghilangkan nilai percepatan data dari nilai frekuensi rendah di setiap x dan sumbu-z yang masuk. Frekuensi rendah dipengaruhi oleh membungkuk, melanggar, memutar, dan sedikit gerakan pada alat.
c. Z-Peak: menentukan tingkat ambang (tz) dalam sumbu-z dan menghilangkan semua data yang melebihi dari tingkat ambang (tz).
d. XZ-Ratio: membandingkan sumbu-x dan sumbu-z yang dapat menghasilkan nilai tx. Data akan dihapus jika 𝑥/𝑧 ≤ tx. e. Kecepatan Vs z Rasio: membandingkan kecepatan dan
sumbu-z dengan rumus z ≤ ts x speed. Contoh penerapan alghoritma pothole:
Detik x y z latitude longitude speed tetha pothole
00.00.00 10,8565 0 19,5463 -6,98294 110,475 13,464 0,395737 Tidak Berlubang
00.00.01 5,60661 0 18,0194 -6,98294 110,475 13,464 Tidak Berlubang
00.00.07 2,46962 2,14282 11,1486 -6,98306 110,475 15,336 Berlubang
Rumus yang digunakan :
Tetha : (time akhir -time awal) / (z akhir - z awal-1) Pothole : Z Dif lebih besar dari tetha Maka Berlubang
4. Evaluasi
1. Jelaskan menurut anda kriteria apa sajakah yang digunakan untuk menghitung nilai pothole!
2. Bagaimana Cara Menghitung No 4, dari contoh soal di atas, kemudian hasil apakah yang akan didapat dari kategori dibawah ini?
Detik x y z latitude longitude speed tetha pothole
00.00.00 10,8565 0 19,5463 -6,98294 110,475 13,464 0,395737 Tidak Berlubang
00.00.01 5,60661 0 18,0194 -6,98294 110,475 13,464 Tidak Berlubang
00.00.07 2,46962 2,14282 11,1486 -6,98306 110,475 15,336 Berlubang
20
Modul 4
Jurusan : Teknologi Informasi
Program Studi : S1 Teknik Informatika
Matakuliah : Kecerdasan Buatan
SKS : 4 (2 – 2)
Pertemuan ke- : 4
Jumlah Halaman : 3
Pembahasan : Penerapan Alghoritma Z-Dif
Pengajar : 1. Astrid Novita Putri, S. Kom., M. Kom.
2. Nur Wakhidah, S.Kom., M.Cs. 3. Siti Asmiatun, S. Kom., M. Kom. 4. Susanto, S.Kom., M.Kom.
1. Alghoritma Z-Diff
Alghoritma Z-Diff merupakan algoritma yang mempertimbangkan perbedaan nilai pada sumbu Z-Axis yang dihasilkan dari accelerometer. Karena nilai sumbu Z-Axis banyak mengalami penurunan atau kenaikan yang disebabkan dari nilai kecepatan antara waktu t i,j-1 dan waktu t i,j. Algoritma ini memerlukan nilai ambang batas untuk mendeteksi lubang. Nilai ambang batas diperoleh dari nilai maksimum sumbu Z-Axis untuk percobaan. Rumus yang digunakan untuk menentukan nilai ambang batas sebagai berikut :
21
Kemudian setelah mendapatkan nilai ambang batas, algoritma ini akan membandingkan dengan 2 nilai yaitu jika hasil dari selisih nilai sumbu Z-Axis dan selisih nilai antara waktu t i,j-1 dan waktu t i,j lebih besar dari nilai ambang batas maka nilainya 1 yang artinya lubang terdeteksi. Rumus yang digunakan sebagai berikut :
Where a= 1, 1≤i≤ n, i € N, j ≥ , j€N Contoh penerapan alghoritma zdif:
Detik x y z latitude longitude speed tetha zdiff pothole
00.00.00 10,8565 0 19,5463 -6,98294 110,475 13,464 0,395737 0,395737 Tidak Berlubang 00.00.01 5,60661 0 18,0194 -6,98294 110,475 13,464 0,127043 Tidak Berlubang 00.00.07 2,46962 2,14282 11,1486 -6,98306 110,475 15,336 1,43072 Berlubang
Rumus yang digunakan :
tetha : (time akhir -time awal) / (z akhir - z awal-1) zdif : (time akhir -time awal-1) / (z akhir - z awal-1) Pothole : Z Dif lebih besar dari tetha Maka Berlubang
2. Evaluasi
22
1. Jelaskan menurut anda kriteria apa sajakah yang digunakan untuk menghitung nilai z dif!
2. Bagaimana Cara Menghitung No 4, dari contoh soal di atas, kemudian hasil apakah yang akan didapat dari nilai alghoritma zdif dan kategori dibawah ini?
Detik x y z latitude longitude speed tetha zdiff pothole
00.00.00 10,8565 0 19,5463 -6,98294 110,475 13,464 0,395737 0,395737 Tidak Berlubang 00.00.01 5,60661 0 18,0194 -6,98294 110,475 13,464 0,127043 Tidak Berlubang 00.00.07 2,46962 2,14282 11,1486 -6,98306 110,475 15,336 1,43072 Berlubang 00.00.13 12,0075 2,61388 11,4497 -6,98282 110,476 21,564 ? ? Modul 4
23
Jurusan : Teknologi Informasi
Program Studi : S1 Teknik Informatika
Matakuliah : Mobile Program
SKS : 4 (2 – 2)
Pertemuan ke- : 4
Jumlah Halaman : 7
Pembahasan : Pengenalan android studio
Pengajar : 1. Astrid Novita Putri, S. Kom., M. Kom.
2. Nur Wakhidah, S.Kom., M.Cs. 3. Siti Asmiatun, S. Kom., M. Kom. 4. Susanto, S.Kom., M.Kom.
1. Pengenalan Android Studio
Android Studio adalah sebuah IDE untuk Android Development yang diperkenalkan google pada acara Google I/O 2013. Android Studio merupakan pengembangkan dari Eclipse IDE, dan dibuat berdasarkan IDE Java populer, yaitu IntelliJ IDEA. Android Studio merupakan IDE resmi untuk pengembangan aplikasi Android.
Sebagai pengembangan dari Eclipse, Android Studio mempunyai banyak fitur-fitur baru dibandingkan dengan Eclipse IDE. Berbeda dengan Eclipse yang menggunakan Ant, Android Studio menggunakan Gradle sebagai build environment. Fitur-fitur lainnya adalah sebagai berikut :
• Menggunakan Gradle-based build system yang fleksibel.
• Bisa mem-build multiple APK .
• Template support untuk Google Services dan berbagai macam tipe perangkat.
24
• Built-in support untuk Google Cloud Platform, sehingga mudah untuk integrasi dengan Google Cloud Messaging dan App Engine.
• Import library langsung dari Maven repository
• dan masih banyak lagi lainnya
Ketika awal saya berkenalan dengan Android, saya menggunakan Eclipse sebagai IDE untuk membuat aplikasi Android. Jika dibandingkan dengan Android Studio memang dari sisi build lebih baik dibandingkan Eclipse, karena Android Studio menggunakan Gradle. Ditambah lagi berbeda dengan Eclipse, kita tidak perlu lagi dipusingkan dengan dependencies package pada Android Studio. Satu hal tambahan lagi yang membuat Android Studio unggul adalah dukungan layout xml editor secara visual yang jauh lebih baik daripada Eclipse. Walaupun begitu, Android Studio saat ini masih dalam tahap beta dan belum mempunyai dukungan untuk NDK/Native Development Kit.
Langkah-Langkahnya sebagai berikut :
25 2. Beri Nama : Helloword
3. Centang Phone and Tablet, Pilih Minimum SDK
26
5. Kemudian ketikkan Activity Name : HelloWord
27
7. Untuk dapat mengubah “Warna”,”Size”, “Bold”,“Italic” terdapat pada menu properties
8. Seandainya ingin di ubah atau tulisannya di perbesar dapat di ubah seperti di bawah ini
28 9. Kemudian Run Hasilnya di bawah ini :
2. Evaluasi
Buatlah tampilan awal untuk aplikasi di bawah ini 1. Halaman Utama
29 2. Halaman Kedua