Draft
5
commutated motor (motor komutasi elektrik) adalah jenis motor sinkron yang disuplai oleh sumber listrik DC untuk mengoperasikan kontrolnya dan memiliki sistem komutasi elektrik(tidak menggunakan sikat/brush dan komutator mekanis) yang berbeda dengan komutator dan sikat(brush) yang bekerja secara mekanik pada motor DC konvensional.
Gambar 2.1 Motor DC brushless
Motor DC brushless terdiri dari 3 jenis motor berdasarkan banyaknya fasa, antara lain motor DC brushless 1 fasa, 2 fasa, dan 3 fasa. Mengacu pada jenisnya, stator pada motor DC brushless memiliki jumlah yang sama dengan belitannya. Motor DC brushless yang sering digunakan adalah motor DC brushless 3 fasa. Walaupun sebenarnya motor ini dinamakan motor DC brushless, sebenarnya motornya sendiri adalah motor AC sinkron magnet permanen (trapezoidal) 3 fasa yang mana putaran pada rotornya disebabkan oleh medan magnet pada stator yang pada setiap saatnya hanya dua fasa yang ter-suply sementara satu fasa lainnya tak tersuply. Fenomena ini mengakibatkan motor ini seperti motor DC, karena arus yang mengalir pada kumparan stator mirip dengan motor DC meskipun motor ini sebenarnya dialiri dengan arus tiga fasa.
Draft
Gambar 2.2 motor DC brushless 1 phasa(a), 2 phasa(b)
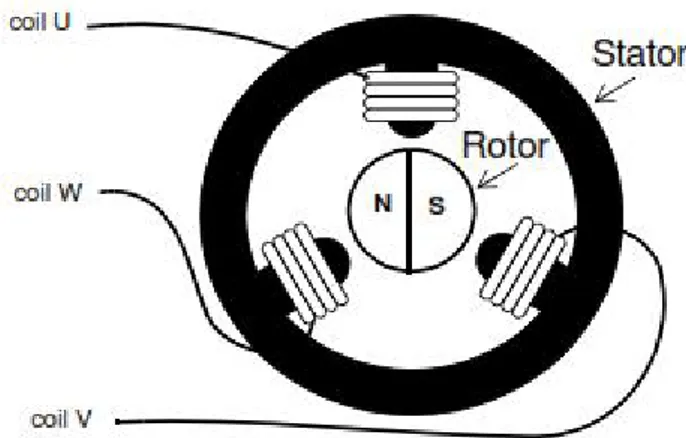
Gambar 2.3 motor DC brushless 3 phasa
2.1.1 Prinsip Dasar Motor DC brushless
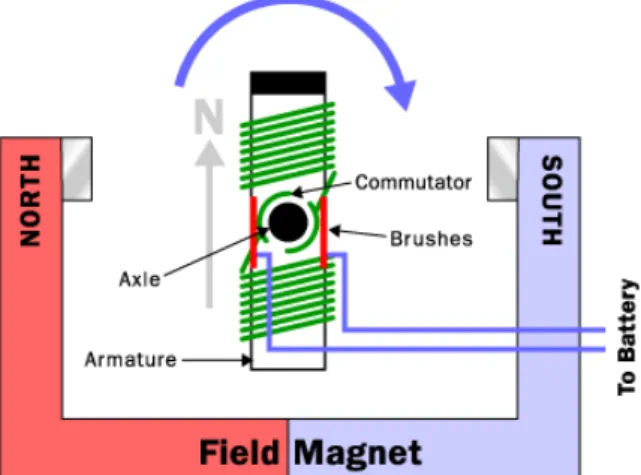
Sebelum berbicara jauh tentang motor DC brushless ada baiknya kita mengkaji ulang prinsip dasar motor DC terlebih dahulu agar prinsip kerja motor DC brushless dapat lebih mudah dimengerti. Pada Motor DC terdapat enam bagian penting yang bisa kita ingat antara lain Rotor, Commutator, Brushes(sikat), Axle (sumbu), Field Magnet (medan magnet) dan DC power supply (sumber DC). Motor menggunakan gaya medan magnet untuk menghasilkan gerakan (putaran).
Hal mendasar dari sifat magnet itu sendiri kutub yang sama akan saling tolak menolak dan yang berlainan akan tarik-menarik. Jadi jika kita punya dua buah magnet dan menandai satu sisi magnet tersebut dengan "north" (utara) dan yang lainnya dengan "south" (selatan), maka bagian sisi
Draft
"noth" akan coba menarik "south", sebaliknya sisi "north" magnet yang pertama akan melawan/menolak sisi "north" magnet kedua dan seterusnya.
Di dalam sebuah elektrik motor kondisi saling "tarik-menarik" dan "tolak-menolak" ini akan menghasilkan gerakan berputar atau sering disebut sebagai rotational motion(gerak putar).
Gambar 2.4 Prinsip gerak putar pada motor DC
Pada gambar 2.4 kita dapat melihat dua buah magnet pada motor. Rotor adalah sebuah elektro magnet (magnet yang dihasilkan dari arus listrik) sedangkan sebagai medan magnet digunakan magnet permanen pada medan statornya dan tidak memiliki lilitan penguat medan magnet
Jika arus DC mengalir, maka rotor akan berputar 180 derajat karena perbedaan kutub antara elektro-magnet dan permanen-magnet. Untuk membuat agar rotor tetap berputar maka kutub di elektro-magnet perlu diubah, hal ini akan dilakukan oleh brushes(sikat). Bagian sikat ini menempel pada dua buah elektroda yang berputar pada rotor dan mengubah polaritas magnet pada elektro magnet pada saat berputar. Permanen magnet pada dasarnya tetap pada posisinya dan tidak berubah, oleh karena itu disebut sebagai "Stator", sedangkan elektro-magnet berputar, maka disebut "Rotor".
Arah gerak rotor juga dapat ditentukan dengan kaidah tangan kiri Flenning yang berbunyi :
Draft
“Apabila tangan kiri terbuka diletakkan diantara kutub Utara dan Selatan sehingga garis gaya yang keluar dari kutub utara menembus telapak tangan kiri dan arus didalam kawat mengalir searah dengan arah keempat jari, maka kawat itu akan mendapat gaya yang arahnya sesuai dengan arah ibu jari (gambar 2.5)”.
Gambar 2.5 Kaidah Tangan Kiri Flenning
Besarnya gaya tersebut : F = B. i. l (Newton) ……….persamaan 2.1 Dimana:
B = kerapatan fluks (webber) l = panjang penghantar (meter)
i = arus yang melewati penghantar (ampere)
Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torsi yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
Dengan prinsip kerja motor DC tersebut sekarang kita dapat memahami prinsip kerja motor DC brushless karena pada dasarnya prinsip kerja motor DC brushless hampir sama dengan prinsip kerja motor DC brushed hanya saja pada motor DC brushless bagian statornya diubah menjadi elektro magnet sedangkan bagian rotornya menjadi permanen magnet. Secara elektronik, motor DC brushless dioperasikan sama seperti motor DC konvensional, hanya saja switching supply arusnya menggunakan rangkaian solid state. Pada motor ini menggunakan transistor lojik sense untuk posisi motor magnit permanennya dan distribusi arus komponen
Draft
medannya. Kumparan medan diberikan energi dalam urutan medan magnitnya. Posisi rotor dideteksi dengan solid state light emitter dan sensor, piranti hall atau piranti yang lainnya. Sinyal feedback dari sensor dikembalikan ke kontrol unit yang akan meng-ON-kan transistor unit, yang akan diterusakan ke kumparan medan stator secara sekuensial. Untuk mendeteksi posisi sudut digunakan hall effect dan sensor optik. Hall effect juga beperan untuk mendeteksi magnitud dan polaritas medan magnit. Karena tidak adanya brushes(sikat) pada motor DC brushless inilah maka untuk merubah polaritas magnet digunakan sebuah rangkaian kontrol seperti disebutkan sebelumnya yang berfungsi untuk mengatur perubahan arus pada elektro magnet(stator) ketika rotornya berputar dan karena jenis motor DC brushless yang digunakan biasanya multi pole maka pada rangkaian kontrol tersebut juga terdapat inverter sehingga motor dapat bekerja(berputar).
Gambar 2.6 Tahapan Daya (Power Stage) dari Motor DC brushless [4]
Draft
2.1.2 Skema Cara Kerja Putaran Motor DC brushless
Melihat prinsip kerja motor DC brushless dan cara kerja sistem half bridge pada proses peng-energize-an koil motor DC brushless maka cara kerja putaran motor DC brushless sekarang dapat kita gambarkan, skema cara kerja putaran motor DC brushless adalah sebagai berikut : [10]
Komutasi menghasilkan medan putar. Pada step 1, phasa U dihubungkan ke kutub positif pada bus motor DC brushless (Q1) lihat gambar 2.4, lalu phasa V dihubungkan ke ground netral(kutub negative baterai) melalui Q4, untuk phasa W tidak ter-energize, 2 buah vektor fluks dihasilkan oleh phasa U (panah merah) dan phasa V(panah biru). Jumlah kedua vektor tersebut menghasilkan vektor fluks pada stator(panah hijau) dimana rotor akan berusaha mengikuti arah fluks stator tersebut. Pada kondisi ini motor sedang standby untuk berputar, ketika posisi rotor sudah mencapai posisi tertentu yang diberikan, maka nilai pernyataan logika pada Hall sensor
Draft
berubah dari “101” ke “001” dan pola tegangan baru tercipta pada motor DC brushless(BLDC) dimana phasa V sekarang tidak ter-energize tetapi phasa W yang sekarang terhubung ke netral ground(Q6) dimana posisi vector fluks stator(panah hijau) sekarang berada pada posisi yang ditunjukan gambar step 2.
Mengacu pada gambar 2.5 dan Tabel 2.1, kita sekarang dapat menentukan switch(Q) mana saja yang aktif ketika phasa tertentu yang ter-energize sehingga arah putaran rotor dapat terlihat. Pada step 3 phasa yang aktif adalah W-V dan posisi vector fluks stator berada pada posisi tersebut, lanjut ke step 4 phasa yang aktif adalah U-V dan rotor terus berputar kearah fluks stator pada step 4.
(sumber : AVR194 “BLDC motor control using ATmega32M1”)
Pada gambar step 5 dan step 6 terlihat phasa lain lagi yang ter-energize dan arah putaran rotor terus mengikuti arah vektor fluks stator yang dihasilkan dan selanjutnya proses putaran kembali lagi ke step 1. Itulah 6 langkah(step) putaran elektris motor BLDC untuk melakukan 1 putaran penuh mekanis motor BLDC.
Draft
2.1.3 Bagian – bagian motor DC Brushless
1. Rotor
Rotor adalah bagian pada motor yang berputar karena adanya gaya elektromagnetik dari stator, dimana pada motor DC brushless bagian Rotor-nya berbeda dengan Rotor pada motor DC konvensional yang hanya tersusun dari 1 buah elektro-magnet yang berada diantara brushes(sikat) yang terhubung pada 2 buah elektroda yang terangkai ke suplai DC. Pada motor DC brushless bagian rotornya tersusun dari sedikitnya 2 hingga 8 pasang kutub magnet permanen berbentuk persegi panjang yang saling direkatkan menggunakan semacam ”epoxy” dan tidak ada brushes-nya.
Gambar 2.7 Rotor pada motor DC brushless
2. Stator
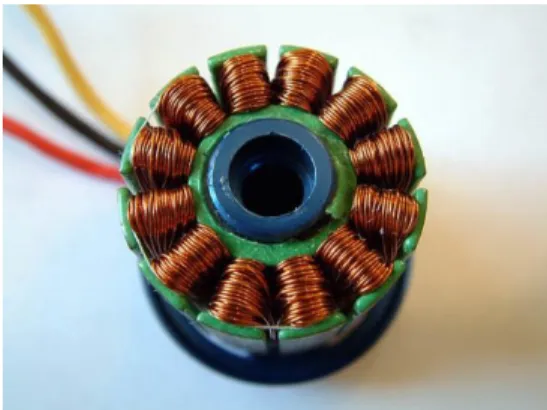
Stator adalah bagian pada motor yang diam/statis dimana fungsinya adalah sebagai medan putar motor untuk memberikan gaya elektro magnetik pada rotor sehingga motor dapat berputar. Pada motor DC brushless statornya terdiri dari 12 belitan (elektro-magnet) yang bekerja secara elektromagnetik dimana stator pada motor DC brushless terhubung dengan 3 buah kabel untuk disambungkan pada rangkaian kontrol sedangkan pada motor DC konvensional stator-nya terdiri dari 2 buah kutub magnet permanen.
Draft
Gambar 2.8 Stator pada motor DC brushless
Belitan stator pada motor DC brushless terdiri dari 2 jenis, yaitu belitan stator jenis trapezoidal dan jenis sinusoidal. Yang menjadi dasar perbedaan kedua jenis belitan stator tersebut terletak pada hubungan antara koil dan belitan stator yang bertujuan untuk memberikan EMF (ElectroMotive Force) balik yang berbeda.
EMF balik sendiri adalah tegangan balik yang dihasilkan oleh belitan motor BLDC ketika motor BLDC tersebut berputar yang memiliki polaritas tegangan berlawanan arahnya dengan tegangan sumber yang dibangkitkan. Besarnya EMF balik dipengaruhi oleh kecepataN sudut putaran motor(ω), medan magnet
yang dihasilkan rotor(B), dan banyaknya lilitan pada belitan stator(N) sehingga besarnya EMF balik dapat dihitung dengan persamaan :
EMF balik = B.N.l.r. ω ... persamaan 2.2
dimana : B= Kerapatan medan magnet yang dihasilkan rotor(Tesla) N= Banyaknya lilitan pada belitan stator per phasa
l= Panjangnya batang rotor (m) r= Jari-jari dalam motor(m)
ω= Kecepatan sudut putaran motor(rad) (dimana ω = 2πf )
ketika motor BLDC sudah dibuat, jumlah lilitan pada stator dan besarnya medan magnet yang dihasilkan nilainya sudah dibuat konstan sehingga yang mempengaruhi besarnya EMF balik adalah
Draft
besarnya kecepatan sudut yang dihasilkan motor, semakin besar kecepatan sudut yang dihasilkan semakin besar pula EMF balik yang dihasilkan. Perubahan besarnya EMF balik ini mempengaruhi torsi motor BLDC, apabila kecepatan motor yang dihasilkan melebihi kecepatan rata-rata motor yang berakibat EMF balik yang dihasilkan lebih besar dari tegangan potensial pada belitan stator sehingga arus yang mengalir pada stator akan turun dan torsi pun akan ikut turun, sebagaimana rumus torsi pada BLDC motor menurut persamaan 2.3 bahwa besarnya torsi yang dihasilkan motor BLDC dapat dihitung dengan :
T = Krms . φ. I (Nm) ...persamaan 2.3 Dimana : Krms = tegangan rata-rata konstant(Volt)
Φ = besarnya fluks magnet (Tesla) I = besarnya arus (Ampere)
Karena berbanding lurus dengan faktor-faktor lain yang mempengaruhi torsi maka kenaikan dan penurunan arus sangat berpengaruh pada besarnya torsi yang dihasilkan motor BLDC.
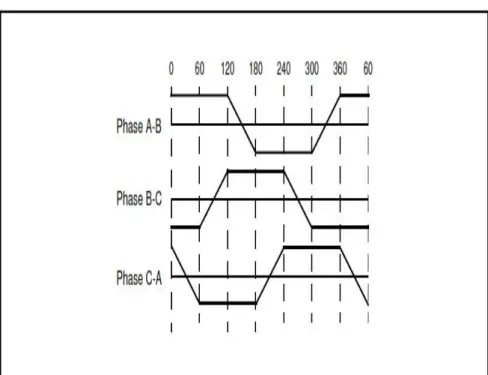
Gambar 2.9 EMF balik trapezoidal yang dihasilkan oleh BLDC motor(sumber :microchip AN885 ”BLDC motor Fundamental”)
Draft
3. Axle
Axle atau sumbu adalah batang yang berfungsi sebagai sumbu putar motor, terpusat pada rotor dan dirangkai bersama rotor. 4. Sensor Hall
Tidak seperti motor DC brushed komutasi dari motor DC bruhless diatur secara elektronik.agar motor dapat berputar, stator harus di-energize secara berurutan dan teratur. Sensor Hall inilah yang berperan dalam mendeteksi pada bagian rotor mana yang ter-energize oleh fluks magnet sehingga proses komutasi yang berbeda (6 step komutasi) dapat dilakukan oleh stator dengan tepat karena sensor Hall ini dipasang menempel pada stator.
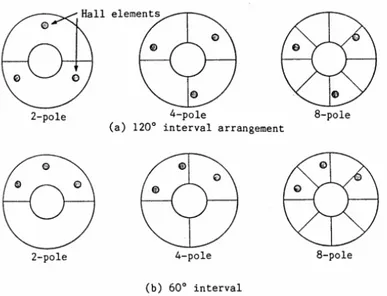
Gambar 2.10 Posisi penempatan sensor Hall
Hall sensor ini ditempatkan setiap 1200 pada jarak antar kutub stator hal ini bertujuan agar deteksi terhadap vektor fluks stator yang dihasilkan akurat sehingga setiap perpindahan komutasi, arus yang mengalir tetap terjaga konstan pada setiap phasa.
Prinsip kerja Hall sensor sendiri membutuhkan arus yang mengalir terus jika ingin digunakan sebagai pendeteksi fluks magnet. Bila butiran-butiran yang terdapat pada gambar 2.11 dimisalkan sebagai gambaran medan magnit, maka daya elektromagnit dibuat atas
Draft
dasar gerakan elektron seperti yangdiberikan oleh kaedah tangan kiri Fleming. Sewaktu daya elektron dibiaskan pada sisi kiri, akibatnya kutub negatif disisi kiri dan kutub positip disisi yang lain (kanan). Polaritas elektrostatik bergantung pada yang dialami butir apakah berkutub utara atau berkutub selatan, dan digunakan untuk menyatakan sinyal pada posisi rotor dalam batas polaritas magnit. Bila motor DC brushless menggunakan elemen Hall sebagai sensor posisi, maka semua elemen-elemen penting dibuat dalam bentuk terpadu sesuai dengan yang ditunjukkan pada gambar 2.12. Misalnya, jika level output adalah H untuk kutub utara, maka level output akan L bila diletakkan pada kutub selatan. Dalam hal ini ketiga IC Hall digunakan sebagai driver untuk motor BLDC tiga phase.
Gambar 2.11 Prinsip kerja elemen Hall
Draft
Gambar 2.13 posisi Hall sensor pada BLDC motor
5. Controller & Inverter (perubah tegangan DC menjadi AC)
Controller pada motor DC brushless berperan sangat penting dan dapat dikatakan sebagai penunjang utama operasi motor DC brushless karena motor DC brushless membutuhkan suatu trigger pulsa yang masuk ke bagian elektromagnetik (stator) motor DC brushless untuk memberikan pengaturan besarnya arus yang mengalir sehingga putaran motor dapat diatur secara akurat. Inverter pada motor DC brushless berpran untuk mengubah tegangan DC ang masuk controller menjadi tegangan AC karena jenis motor DC brushless biasanya multipole 3 phase maka dibutuhkan inverter 3 phasa tegangan DC menjadi AC agar motor dapat berputar. Berdasarkan kemampuan control power supply, kita dapat memilih dengan tepat rating tegangan untuk motor yang dibutuhkan. Untuk tegangan 48 volt atau kurang dari itu, biasanya digunakan untuk bidang otomotif, robotik, atau penggerak lengan mekanik kecil. Untuk rating tegangan 100 volt dan lebih dari itu digunakan dalam bidang otomasi industri dan penggerak alat-alat industri.
Draft
Gambar 2.14 konfigursi dasar sistem bridge inverter 3 phasa
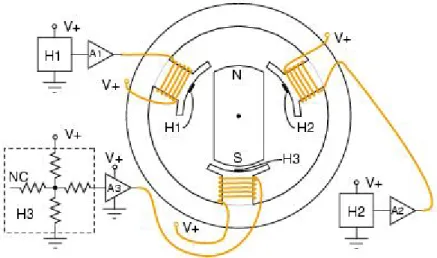
Gambar 2.15 sistem drive motor DC brushless dengan menggunakan jembatan inverter 3 phasa dan sensor hall (PWM)
Draft
2.1.4 Keunggulan motor DC brushless
Motor DC brushless diciptakan untuk memperbaiki beberapa kekurangan yang dimiliki oleh motor DC brushed walaupun motor DC brushed lebih mudah diproduksi dan prinsip kerjanya sederhana karena pada motor DC brushed terdapat beberapa kekurangan antara lain :
Brushes(sikat) lama kelamaan akan menjadi rusak.
Karena sikat memutus dan menghubungkan koneksi, maka akan menimbulkan storing/electrical noise.
Brushless membatasi kecepatan maximum dari motor.
Karena posisi electromagnet ada di tengah-tengah (rotor), maka pendinginan motor menjadi lebih sulit.
Penggunaa sikat juga berarti membatasi jumlah kutub magnet yang dapat diinstalasi.
Motor DC brushless mampu meminimalisir kekurangan yang dimiliki oleh motor DC brushed karena konstruksi motor DC brushless yang sedemikian rupa dan tidak menggunakan sikat maka motor DC brushless memiliki beberapa keunggulan antara lain :
Karena bukan sikat tetapi rangkaian mikrokontroler yang mengontrol perpindahan arus, maka arus tersebut akan bisa lebih akurat (presisi). Kontroler juga dapat mengatur kecepatan motor lebih baik sehingga membuat "brushless motor" lebih efisien.
Tidak adanya storing/electrical noise atau suara bising akibat gesekan celah udara antara rotor dan sikat.
Tidak menggunakan sikat yang dapat rusak setelah lamanya pemakaian.
Dengan posisi electromagnet di bagian stator, maka pendinginan motor menjadi lebih mudah.
Jumlah electromagnet di stator dapat sebanyak mungkin untuk mendapatkan kontrol yang lebih akurat.


![Gambar 2.6 Tahapan Daya (Power Stage) dari Motor DC brushless [4]](https://thumb-ap.123doks.com/thumbv2/123dok/2694028.2259824/5.892.222.686.620.966/gambar-tahapan-daya-power-stage-dari-motor-brushless.webp)