Bud; Sulistyo, dkk. ISSN 0216 - 3128
/49
PENGGERAK
LISTRIK
P ADA
RANCANG
BANGUN
DAN UJI
FUNGSI
ELEKTRODA
PEMANAS
BUSUR
PEMBUATAN
ZIRKON KARBIDA
Budi Sulistyo, Tundjung Indrati Yulianti
Pusat Teknologi Akselerator dan Proses Bahan - BATAN
ABSTRAK
RANCANG BANGUN DAN WI FUNGSI PENGGERAK ELEKTRODA PEMANAS BUSUR LISTRIK PADA PEMBUATAN ZIRKON KARBIDA. Telah dilakukan rancang bangun alat penggerak elektrode pada pemanas busur /istrik yang dapat beroperasi sampai mencapai suhu 2000lie. Sistem pemanas meggunakan elektrode graftt dengan diameter 6 mm. dengan arus /istrik sebesar 80 amper, dan tegangan 25 volt. Sebagai bahan tempat sampel atau umpan dibuat dari graftt. Supaya terjadi busur /istrik jarak elektrode dari tempat sampel jaraknya 3mm. Selama proses pemanasan elektrode selalu berkurang sebesar
I
mm/menit. Alat ini dirancang untuk menggerakan elektrode. ke atas atau ke bawah dengan kecepatanI
mm/menit. Motor /istrik jenis AC sebagai penggeraknya dengan kekuatan 150 wall. dan menggunakan trasmisi berbentuk u/ir.
ABSTRACT
DESIGN AND TRIAL RUN OF THE ELECTRODE ACTIVATOR FOR AN ELECTRIC ARC HEATER AT THE MAKING OF ZIRCON CARBIDE. The design of the electretrode activator for an electric arc
heater operating up to the temperature of 2000 "C has been performed. The heater system uses graphite electrode with the6mm for its diameter. 80 amperes for its electric current,25 volt for its voltage. The distance of electrode and sample is3mm for geiling electric bow made by. Was made by graffite. The sampling port was made of graphite. The distance of the electrodefrom the sampling port is3mm in order the electric arc occurs as the heating proceeder, the electrode always decrases as
I
mm/menite. This device was designed for driving the electrode up and down with the minimum speed of / mm/minute. The electromotor of AC type as its activator with the power of /50 walls. andif
used thread trasmision.PENDAHULUAN
Perlunya
menunjangdi penelitian'sediakan alatdi pemanasbidang proses.untuk Tungku pemanas suhu tinggi di atas 1800 °C, belum ada yang dapat digunakan. Alat tersebut sangat diperlukan untuk proses pembuatan bahan dukung. Untuk pengadaan alat yang baru sangat tidak mungkin karena anggaran yang terbatas dan harganya sangat mahal, mengingat keadaan tersebut maka perlu dibuat atau diraneang bangun alat tersebut yang akan diperlukan untuk penelitian. Alat pemanas system busur listrik., diharapkan sangat aplikatif untuk membuat pemanas pasir zirkon sehingga dihasilkan zirkon karbida. Pemanasan busur Iistrik terdiri dari tiga bagian, yaitu : trafo pembangkit listrik, elektrode, dan krus tempat pemanas.a. Trafo pembangkit listrik, mempunyai kapasitas 3400 watt, dengan tegangan 28 volt, dan arus
listrik sebesar 80 amper dengan arus bolak . balik.
b. Elektrode untuk mengubah arus listrik menjadi tenaga panas mempunyai ukuran panjang 30 em dan diameter 6 mm, terbuat dari karbon. e. Krus sebagai kutup negatif dan sekaligus
tempat pemanas, terbuat dari graft, di tempatkan sedemikian rupa dan di isolasi dengan batu tahan api setebal 5 - 7 em supaya kedap udara.
Ukuran alat ini tergantung dari besar keeilnya transfomator, sebagai sumber Iistrik. Prinsip kerja alat ini adalah apabila kedua kutup ini didekatkan pada jarak tertentu terjadi loneatan listrik yang dikenal dengan busur listrik, busur Iistrik ini yang dimanfaatkan sebagai sumber pemanas, jarak busur listrik ini dipertahankan jangan sampai sam bung dengan kedua kutub
terse but dan jangan sampai terlalu jauh karena busur listrik akan hilang. Jauh dekatnya busur
Prosiding PPI - PDIPTN 2006 Pustek Akselerator dan Proses Bahan - BATAN
Yogyakarta, 10 Jull 2006
150 ISSN 0216 - 3128
Bud; Sulistyo, dkk. listrik ini tergantung dari besar kecilny tegangan
listrik yang berasal dari sumber listrik. Luas dan tebal isolator tergantung dari arus listrik yang diberikan oleh trafo. Karena setiap saat elektrode mengeluarkan busur listrik ada sebagian dari elektrodenya terkikis (termakan), sehingga akan mempengaruhi jarak dari kutup positif dan negatif, makin lama jaraknya akan semakin jauh yang berakhir busur Iistrinya mati. Pada perancangan ini yang dititik beratkan supaya busur Iistrik yang terbentuk dapat stabil, karena jarak yang tetap. Pada alat ini dibuat tempat yang bisa memegang elektrode dan digerakkan turun pada yarak yang tepat dan tetap. Sebagai penggerak digunakan motor listrik. Elektrode yang digerakkan, kutup negatipnya sedangkan posisinya tetap.
Telah direkayasa dan dibuat suatu peralatan untuk proses pemanasan suhu tinggi dengan tungku busur Iistrik, dengan menggunakan elektroda graftt sebagai elektroda pemanas untuk menimbulkan busur. Proses sebelumnya elektrode masih digerakkan secara manual/dengan gerakan tangan, dan telah diuji cara untuk proses produksi dalam skala laboratorium yang hasilnya masih perlu untuk penyempurnaan alat. Dengan perancangan ini diharapkan mengganti gerakan manual menjadi gerakan mekanik, sehingga busur Iistrik yang ditimbulkan akan lebih stab ii, dan diperoleh suhu pemanasan yang lebih baik.
TATA KERJA
Alat Yang DigunakanMotor Iistrik AC dengan tegangan 170 Volt, kecepatan putar 70 rpm, tempat pegangan electrode dan sekaligus tempat motor Iistrik, tiang sebagai kedudukan pemegang elektrode, yang didalamnya dan peralatan pendukung yaitu dua roda gigi, sebagai red user kecepatan dan roda gigi ulir sebagai transmisi. Tombol ON dan OFF, dan tombol untuk ke atas dan ke bawah, kontaktor, trasfomator tegangan dengan kapasitas 500 watt.
elektroda yang tetap. Adanya gerakan tetap diharapkan tidak terjadi pemutusan busur listrik, yang dapat menggangu proses pemanasan. Pada proses pemanasan menggunakan busur listrik, busur yang terbentuk harus tetap artinya tidak terhenti nyalanya. Sehingga diperlukan sistem penggerak elektroda graftt dengan menggunakan motor listrik, dengan kecepatan tetap, sehingga terbentuknya busur selama proses berjalan tetap nyala.
A.I. Perhitungan berat pemegang elektrode: Bila obyek dengan berat W (kg) diangkat melawan gravitasi untuk
I
meter (m) pada kecepatan konstan, mengambil waktu t sekon (s),kakas F dan daya diperlukan P adalah sebagai berikut :
F
=
WI(kg.m) (J)P = Wilt (kg.m/s)
Karena lit adalah kecepatan v (m/s), jadi
P = Wv (kg.m/s) (2)
Apabila satuan gravitasi dinyatakan dalam kg.m diubah dalam nilai MKS, maka
I (kg-m) = g (1) = 9,8 (J) (joule) I (kg.m/s)
=
9,8 (J/s)=
9,8 (W)Akibatnya, persamaan (2) dapat diubah ke dalam unit MKS sebagai berikut
P
=
9,8 Wv(W) (3)Lebih lanjut, karena P adalah daya yang diperlukan untuk kerja, bila eftsiensi mekanis tidak terhitung eftsiensi motor adalah TJ (%), keluaran Pm motor
adalah sebagai berikut :
100
100
Pm =
9,SWvx-(W)
=9,SWvxIO·3x-(kW)(4)
17 17
Akan tetapi, untuk menentukan keluaran motor sebenarnya, perlu untuk diperhatikan kakas geser yang berubah-ubah, kopel asut dan tegangan poros, dan faktor keselamatan dari rancangan dan produksinya.
(5)
HASIL DAN PEMBAHASAN
a. Perancangan Alat
Pada perancangan ini, adalah melengkapi peralatan sebagai tahap untuk penyempurnaan sistem penggerak elektroda graftt, yang dapat diusahakan dengan gerakan manual/penggerak dengan tangan, diganti dengan gerakan mekanik motor Iistrik, agar didapatkan kecepatan gerakan
1.
2.
Menentukan arus nominal motor jenis rotor sangkar untuk motor induksi I fasa dengan daya (P) sebesar 155 watt.
In =
746.P
17·V.COSrpdengan In adalah arus nominal motor (A), 746 sarna dengan 1 HP (watt), P daya motor (kilowatt), 1'/ efesiensi motor, V tegangan
jala-jala (volt), dan CDS (jJ faktor kerja. Sehingga
dari persamaan 5, In dapat dihitung sebagai berikut :
Proslding PPI • PDIPTN 2006
Pustek Akselerator dan Proses Bahan - BATAN Yogyakarta, 10 Jull 2006
Bud; Sulistyo, dkk. ISSN 0216 - 3128 151
In=
746xO,155
=1,7A
O,85xl00xO,8
3. Faktor keamanan I, \.In = I, I x 1,7= 1,87A
A.2. Menentukan Daya yang diperlukan Untuk Pembebanan Konstan
Untuk pengangkatan
obyek (ke atas)
Beban yang diterima motor adalah beban yang bersifat aksial yaitu beban tekan dan tarik, motor digunakan untuk menaikkan dan menurunkan beban yang beratnya konstan yaitu beban obyek W = 20 kg diangkat melawan gravitasi setinggi 40 em (0,4 m) dengan keeepatan V· = 3 mm/menit atau0,00005 m/detik. ,,= 85% maka gaya (F) dan Daya (P) yang diperlukan :
F = W.I(kg.m) = 20xO,4 = 8 kg.m (6)
p= W. V(kg.m/det) (7)
= 20xO,00005 = 0,00 I kg.m.det
apabila satuan gravitasi dinyatakan dalam kg.m diubah dalam nilai MKS, maka : I kg.m = gravitasi (g) J= 9,8 Ooule)
I kg.m/s = 9,8 (J/s) = 9,8 W. Persamaan (7) diubah ke dalam unit MKS, sebagai berikut :
P = 9,8 W. V= 9,8x20xO,00005 = 0,0098 kw = 9,8 Watt
P adalah daya yang diperlukan untuk kerja, bila '7 mekanik tidak terhitung '7motor adalah
'7(%). Keluaran Pm motor adalah :
Pm =
9,8 WV.IOO
(watt) =
9,8.WV.10-3•IOO
(kilowatt)
17 17
=
9
8x20xO
005xl
0-3100
=
(9,8x20xO,005xl
0-3xl 00) - 0
115kW
,
,
0,85
0.85
'
P motor =0,115 kW, motor yang ada adalah = 155wa//= 0,155 kW
Disamping itu faktor yang menghambat gerakan dapat dianalis sebagai berikut :
I. Permukaan kontak antara obyek terjadi gesekan (antara roda gigi dan bantalan) 2. Perbedaan tekanan atmosfer menimbulkan
daya penyerapan
3. Daya adhesifterjadi antara obyek
4. Permukaan kontak antara obyek terpengaruh tekanan vertikal karena berat dari benda dan gravitasi bumi (g=9,8 m/s2).
Tekanan vertikal dinyatakan dengan W satuannya newton, sehingga daya keluaran motor Pm, harus bisa mengatasi keempat point diatas.
Hubungan antara perputaran dari kopel, daya dan beban yang diperlukan untuk menjalankan beban pada perputaran yang normal, dan berubah-ubah disebut karakteristik perputaran kopel dari beban. Bila keluaran normal (kW/Pm) motor dan rpm diketahui atau ada pada name plate, maka besamya kopel beban penuh (kgm) dapat dihitung dengan persamaan ( 8 ) sebagai berikut :
k
ope
I b b
e anpenu
h
=~~~~~~~~~-x
keluaran nominal (kW)
97411r{n:g/m/
.I .\ (8.)putaran beban penuh (ppm)
pada motor penggerak ini, mempunyai kopel beban penuh sebagai berikut :
0,115
kopel beban penuh
=--x
974
= 0,888 kg/m
170
Sistem penggerak elektroda memerlukan transmisi untuk pemindahan daya dan putaran dari motor listrik. Dalam pemilihan transmisi diperlukan pertimbangan teknik yang memenuhi persyaratan dan efisiensi, diantaranya adalah bahwajarak antara poros motor dan poros beban eukup dekat, dan A.3. Perancangan Sistem
Transmisi
Mekanik dan dipasang secara horisontal sejajar, maka dipilih transmissi roda gigi lurus (spur gear), karena transmisi dengan roda gigi mempunyai banyak keuntungan, diantaranya : Bebas slip, dapat digunakan untuk pemindahan daya dari ukuran kecil maupun yang sangat besar yang dapat digunakan pad a putaran penggerak maupun beban yang tinggi, sedang ataupun putaran rendah.
PrQ:iI~lng PPI • PDIPTN Z006 Pustek Akselerator dan Proses Bahan - BATAN
152
-
ISSN 0216 - 3128 Bud; Sulistyo, dkk.(9 )
(II)
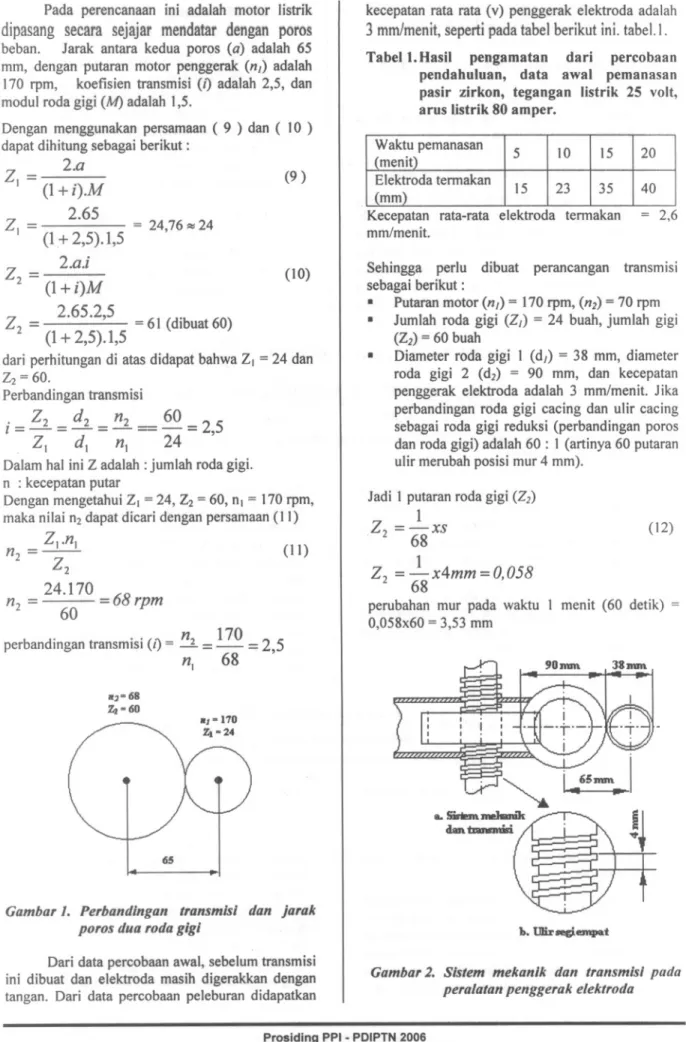
(10) Pada perencanaan ini adalah motor listrik
dipasang secara sejajar mendatar dengan poros
beban. Jarak antara kedua poros (a) adalah 65 mm, dengan putaran motor penggerak (nJ) adalah 170 rpm, koefisien transmisi (z) adalah 2,5, dan modul roda gigi(M)
adalah 1,5.Dengan menggunakan persamaan ( 9 ) dan ( 10 ) dapat dihitung sebagai berikut :
Z-~
,-(1+ i).M
Z
1=----
2.65
=
24,76",,24(1
+
2,5).1,5
Z _
2.a.i
2 -(1
+
i)M
Z
2= ----
2.65.2,5
=
61 (dibuat 60)(1
+
2,5).1,5
dari perhitungan di atas didapat bahwa Z,
=
24 danZ2
=
60.Perbandingan transmisi
i
=
Z2
= ~ = ~
=
60
=
2 5
,
ZI
d,
nl24
Dalam hal ini Z adalah : jumlah roda gigi. n : kecepatan putar
Dengan mengetahui Z,
=
24, Z2=
60, n,=
170 rpm, maka nilai n2 dapat dicari dengan persamaan(I I)
ZI·nl
n2 =--Z224.170
n2
=---=68rpm
60
b d'
"("
n2170
per an mgan transmlSI
'I
= -
= --
= 2,5
nl
68
65
Gambar I. Perbandingan
transmisi dan jarak
poros dua roda gigi
Dari data percobaan awal, sebelum transmisi ini dibuat dan elektroda masih digerakkan dengan tangan. Dari data percobaan peleburan didapatkan
kecepatan rata rata (v) penggerak elektroda adalah 3 mmlmenit, seperti pada tabel berikut ini. tabel.l. Tabel 1. Hasil pengamatan dari percobaan
pendahuluan, data awal pemanasan pasir zirkon, tegangan listrik 25 volt, arus listrik 80 amper.
Waktu pemanasan201510 5 (men it)
Elektroda tennakan 15 233540
(mm)
Kecepatan rata-rata elektroda tennakan = 2,6 mm/menit.
Sehingga perlu dibuat perancangan transmisi sebagai berikut :
• Putaran motor (nJ)= 170 rpm, (n2) = 70 rpm • Jumlah roda gigi (ZJ)
=
24 buah, jumlah gigi(Z2)
=
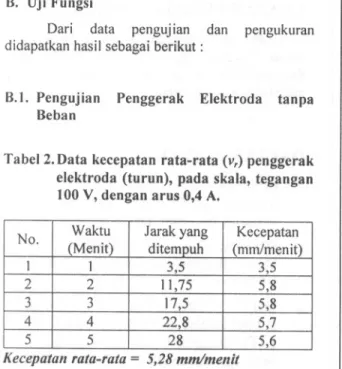
60 buah• Diameter roda gigi 1 (da
=
38 mm, diameter roda gigi 2 (d2) = 90 mm, dan kecepatan penggerak elektroda adalah 3 mm/menit. Jika perbandingan roda gigi cacing dan ulir cacing sebagai roda gigi reduksi (perbandingan poros dan roda gigi) adalah 60 : 1 (artinya 60 putaran ulir merubah posisi mur 4 mm).Jadi 1 putaran roda gigi (Z2)
1
Z2 = 68 xs
(12)1
Z2
=
-x4mm=O,058
68
perubahan mur pad a waktu 1 menit (60 detik) = 0,058x60 = 3,53 mm 38mm I
--;----I
L-/
.
~ i~"-.I
!i
b.tnirseciernpatGambar
2.Sistem mekanik dan transmisi pada
peralatan penggerak elektroda
Prosiding PPI - PDIPTN 2006
Pustek Akselerator dan Proses Bahan· BATAN Yogyakarta, 10 Juli 2006
IlIllI1 .\'/111,\'(1'11,
dU,
ISSN 1121(,- .H2H 1.1'.18. Uji Fungsi
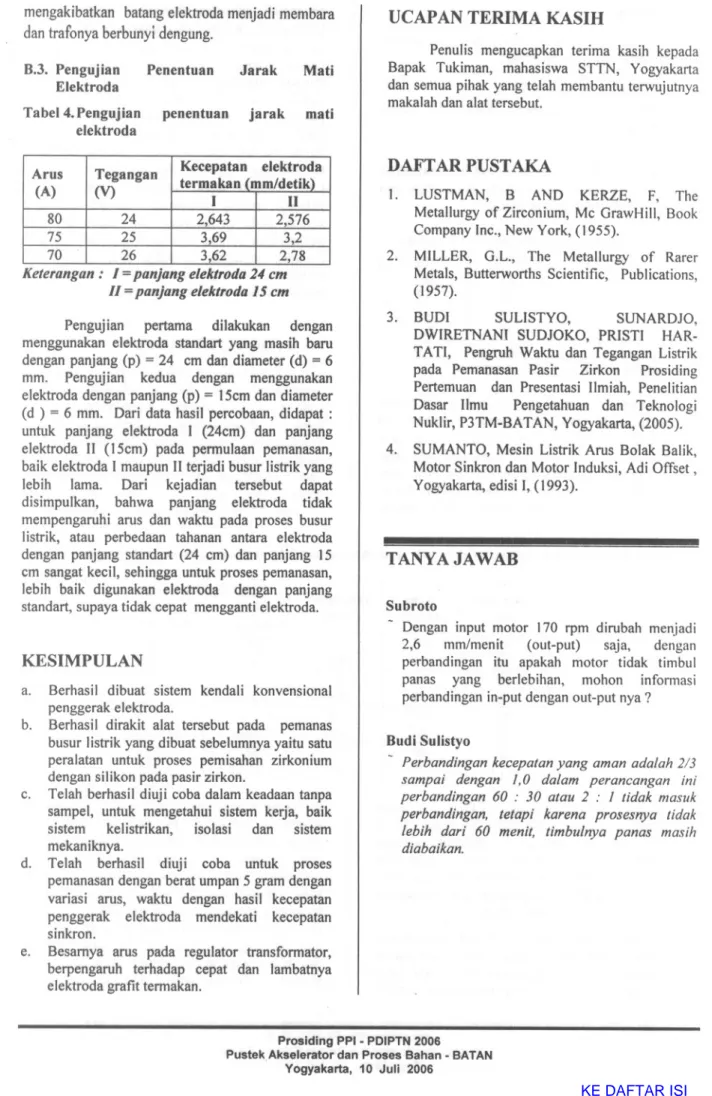
Dari data pengujian dan pengukuran didapatkan hasil sebagai berikut :
B.l. Pengujian Penggerak Elektroda tanpa 8eban
Tabel 2. Data keeepatan rata-rata (v,) penggerak elektroda (turun), pada skala, tegangan 100 V, dengan arus 0,4 A.
No.
Waktu
Jarak yangKeeepatan (Men it) ditempuh(mm/menit)
I
I
3,53,5 2 2 11,755,8 3 3 17,55,8 4 4 22,85,7 5 5 285,6Kecepatan rata-rata
=
5,28
mm/menitPada pengujian ini, elektroda grafit belum dipasang pad a batang penggerak. Pereobaan ini bcrtujuan untuk mengetahui kinerja mesin dan kendali motor, serta untuk mengetahui keeepatan batang penggerak elektroda seeara naik dan turun, dan melihat arus dan tegangan yang dipakai. Selain itu, juga hal-hal yang terjadi pada batang
penggerak, sehingga didapatkan parameter yang tepat untuk meneapai hasil yang optimal. Dari data dan pengamatan, bahwa daerah optimal untuk batang penggerak elektroda adalah : pada titik minimallbatas bawah adalah 15 em dari titik nol. Untuk titik maksimallbatas atas adalah skala penggaris 45 em. Pada batas atas itu bila motor dipaksa dijalankan melewati garis daerah titik bawah dan titik atas tersebut, maka penyangga dan ulir akan terjadi getaran dan ulir transmisi bergerak turun dengan eepat, yang bisa mengakibatkan patahnya batang elektroda. Hal ini disebabkan karena pada pemasangan ulir transmisi an tara pemasangan di atas dan di bawah tidak terpusat (center), sehingga berakibat roda gigi dipaksa mendesak batang yang tidak sejajar dan mengakibatkan motor bekerja lebih berat.
B.2. Pengujian dengan Sampel
Pereobaan ini bertujuan untuk mengetahui skala ampere pad a trafo agar didapatkan keeepatan yang sesuai, juga arus pada proses pemanasan yang tepat agar dihasilkan berat sampel yang maksimal. Pereobaan ini menggunakan IImpan seberat 5 gram, yang terdiri dari 75% pasir zirkon dan 25% karbon. Pada pereobaan ini menggunakan skala trafo bervariasi yaitu skala 40, skala 50, skala 60, skala 70, skala 80, skala 90, skala 100, dan skala 110.
Tabel3. Pengujian keeepatan elektrode termakan (mm/detik), terhadap besar arus yang terpasang
Skala pada Arus
TeganganPaniane Eleketrode
No. 15 em
25cm
alat (Amper)(mm/menit)(Volt)(mm/menit)
1 40 800,0477240,02875 2 50 7824,50,14120.0548 3 60 760,2302250,2162 4 70 7425,50,2750,1330 5 80 7226,00,17470,3914 6 90 7026,50,34840,4246 7 100 690,507927 0,559 8 110 670.604328 0,842
Dari data pereobaan (Tabel. 3.) dapat disimpulkan bahwa, pada skala 70 A dan 80 A putaran/kecepatan penggerak eJektroda dengan elektroda yang termakan untuk peleburan putarannya bisa mendekati sinkron, sehingga mulai tidak terjadi konduksi, juga dihasilkan pemanasan dan berat sampel yang paling efektif.
Tetapi pada skala 90 - 110 A, pada proses pemanasan/peleburan, pada saat pemanasan berlangsung terdapat semburan bunga api yang sangat putih dan kuat yang mendorong sampel
keluar ke segala arah. Hal terse but terlihat pad a tumpahan sampel keluar dari tempatnya, serta silikat yang terpisah dari pasir zirkon, menyebar dan menempel cukup tebal pada seluruh permukaan krus, hal ini disebabkan arus Iistrik yang cukup besar (90 sId 100 A). Penyebab terjadinya konduksi pada proses pemanasan adalah kecepatan elektroda termakan tidak seimbang dan arus Iistrik yang dibutuhkan, berakibat elektroda dan kutup negatip menempel, terjadilah hubung singkat (short) antara katoda dan anoda,
Prosldina PPI - PDIPTN 2006 Pustek Akselerator dan Proses Bahan - BATAN
154 ISSN 0216 - 3128 Budi Sulistyo, dkk.
mengakibatkan batang elektroda menjadi membara dan trafonya berbunyi dengung.
B.3. Pengujian Elektroda
Tabel 4. Pengujian penentuan jarak mati elektroda
Penentuan Jarak Mati
UCAP AN TERIMA
KASIH
Penulis mengucapkan terima kasih kepada Bapak Tukiman, mahasiswa STTN, Yogyakarta dan semua pihak yang telah membantu terwujutnya makalah dan alat tersebut.
KESIMPULAN
Keterangan: J
=
panjang elektroda 24 em 1J=
panjang elektroda J5
em Arus TeganganI Kecepatan elektroda (A) (V) termakan (mm/detik)I
II
80 242,6432,576 75 253,693,2 70 263,622,78Pengujian pertama dilakukan dengan menggunakan elektroda standart yang masih baru dengan panjang (p)
=
24 cm dan diameter (d)=
6 mm. Pengujian kedua dengan menggunakan elektroda dengan panjang (p)=
15cm dan diameter (d )=
6 mm. Dari data hasil percobaan, didapat : untuk panjang elektroda I (24cm) dan panjang elektroda II (15cm) pad a permulaan pemanasan, baik elektroda I maupun II terjadi busur listrik yang lebih lama. Dari kejadian tersebut dapat disimpulkan, bahwa panjang elektroda tidak mempengaruhi arus dan waktu pad a proses busur listrik, atau perbedaan tahanan antara elektroda dengan panjang standart (24 cm) dan panjang IS cm sangat kecil, sehingga untuk proses pemanasan, lebih baik digunakan elektroda dengan panjang standart, supaya tidak cepat mengganti elektroda.a. Berhasil dibuat sistem kendali konvensional penggerak elektroda.
b. Berhasil dirakit alat tersebut pada pemanas busur listrik yang dibuat sebelumnya yaitu satu peralatan untuk proses pemisahan zirkonium dengan silikon pada pasir zirkon.
c. Telah berhasil diuji coba dalam keadaan tanpa sampel, untuk mengetahui sistem kerja, baik sistem kelistrikan, isolasi dan sistem mekaniknya.
d. Telah berhasil diuji coba untuk proses pemanasan dengan berat umpan 5 gram dengan variasi arus, waktu dengan hasil kecepatan penggerak elektroda mendekati kecepatan sinkron.
e. Besamya arus pada regulator transformator, berpengaruh terhadap cepat dan lambatnya elektroda grafit termakan.
DAFT AR PUST AKA
1. LUSTMAN, BAND KERZE, F, The
Metallurgy of Zirconium, Mc GrawHill, Book Company Inc., New York, (1955).
2. MILLER, G.L., The Metallurgy of Rarer Metals, Butterworths Scientific, Publications, (I957).
3. BUm SULISTYO, SUNARDJO,
DWIRETNANI SUDJOKO, PRISTI HAR-TATI, Pengruh Waktu dan Tegangan Listrik pada Pemanasan Pasir Zirkon Prosiding Pertemuan dan Presentasi I1miah, Penelitian Dasar I1mu Pengetahuan dan Teknologi Nuklir, P3TM-BA TAN, Yogyakarta, (2005). 4. SUMANTO, Mesin Listrik Arus Bolak Balik,
Motor Sinkron dan Motor Induksi, Adi Offset, Yogyakarta, edisi I, (1993).
TANYAJAWAB
SubrotoDengan input motor 170 rpm dirubah menjadi 2,6 mm/menit (out-put) saja, dengan perbandingan itu apakah motor tidak timbul panas yang berlebihan, mohon informasi perbandingan in-put dengan out-put nya ?
Budi Sulistyo
- Perbandingan keeepatan yang aman adalah 2/3 sampai dengan 1.0 dalam perancangan ini perbandingan 60 : 30 atau
2 :
I tidak masuk perbandingan. tetapi karena prosesnya tidak lebih dari 60 menU, timbulnya panas masih diabaikan.Prosiding PPI - PDIPTN 2006
Pustek,Akselerator dan Proses Bahan· BATAN Yogyakarta, 10 Juli 2006