AMT(Automated Manual Transmission), dan CVT (Continuously Variable Transmission) untuk MOBIL LISTRIK dan MOBIL HYBRID
Dalmasius Ganjar Subagio*
Agus Salim Lembaga Ilmu Pengetahuan Indonesia ( LIPI )
Komplek LIPI Jl. Cisitu No 21/154 D, Bandung 40135 E – Mail : @lipi.go.
ABSTRAK
Kegiatan ini dimaksudkan untuk mengatasi kesulitan dalam penentuan tingkat percepatan dan laju kecepatan kendaran mobil listrik dan kendaraan hybrid sekaligus juga untuk menunjang kegiatan penelitian dan pengembangan mobil listrik yang telah dilakukan selama beberapa tahun terakhir ini.
Penelitian ini meliputi studi literature, perancangan dan penentuan sistim percepatan dan perbandingan gigi transmisi dengan mengacu pada mobil listrik yang sudah ada di pasaran dan rancang bangun satu unit prototype.
Kegiatan ini dilaksanakan dengan cara mempelajari system yang telah ada kemudian dilakukan analisis terhadap system kerja dari transmisi tersebut (reverse engineering). Untuk mendapatkan kesempurnaan, data yang diperoleh pada hasil pengujian dijadikan acuan untuk menentukan perubahan yang selanjutnya akan dibuat prototype baru.
Pada akhir kegiatan ini dihasilkan sebuah desain transmisi roda gigi planet yang akan digunakan pada mobil listrik dan mobil hybrid. Keberhasilan dalam kegiatan ini diharapkan memperkuat posisi negara kita dalam pengembangan teknologi kendaraan listrik dan dapat menjadi sarana strategis dalam melindungi negara kita dari serbuan produk sejenis dari luar negeri.
PENDAHULUAN
Sistem transmisi pada suatu kendaraan berfungsi untuk meneruskan daya dari sumber penggerak kendaraan ke roda dengan mengatur putaran sesuai tingkat kecepatan yang diinginkan. Sumber penggerak pada mobil listrik berupa motor listrik yang memiliki karakteristik berbeda dengan penggerak pada mobil konvensional yang berupa mesin motor bakar.
Motor listrik DC memiliki keuntungan pada kemudahan pengontrolan putaran dengan daya yang relatif konstan pada berbagai kecepatan, sehingga transmisi untuk mobil listrik dapat dibuat dengan hanya mengandalkan pada rasio transmisi tunggal.
Kegiatan ini dimaksudkan untuk mengantasi kesulitan dalam penentuan tingkat percepatan dan laju kecepatan kendaran mobil listrik dan kendaraan hybrid sekaligus juga dapat diimplementasikan pada hasil prototype mobil listrik yang dihasilkan pada kegiatan penelitian dan pengembangan mobil listrik yang telah dilakukan selama tiga tahun di pPuslit Telimek LIPI.
Kegiatan ini meliputi rancang bangun transmisi untuk mobil hybrid dengan target pembuatan prototipe sampai pada pengujian sehingga dapat menguasai teknologi transmisi untuk mobil listrik dan mobil Hybrid. Keberhasilan dalam kegiatan ini diharapkan memperkuat posisi negara dalam pengembangan teknologi kendaraan listrik dan dapat menjadi sarana strategis dalam melindungi negara dari serbuan produk sejenis dari luar negeri.
Landasan Teori
Dari desain planetary gear box bagian yang penting adalah perhitungan roda gigi planet , roda gigi matahari, roda gigi ring serta jarak sumbu masing – masing roda gigi. Selain itu perbandingan putaran juga sangat penting dalam sebuah sisitem gear box. Adapun landasan teori yang dipakai pada perhitungan roda gigi yaitu :
Modul (M) 2 0 + = = π = Z D Z D t M p (5) ... (1) Diameter pitch ( ) = Z . M ... (2) Diameter puncak ( ) = + 2 . ... (3)
Jarak antar gigi (t)
Z D
t = π. p ... (5) Tebal gigi (b) b = ½ . t ... (6) Jarak antar sumbu a =
2 2 1 p p D D − ... (7) M : Modul : Diameter pitch : Diameter puncak : Diameter kaki Z : Jumlah gigi t : Jarak antar gigi b : Tebal gigi
a : Jarak sumbu poros
Pembahasan dan Hasil
Data awal untuk perhitungan dan desain system transmisi ini diperoleh dari hasil pengukuran dan pengamatan sebagai berikut :
Jumlah gigi matahari ( ) : 24 Jumlah gigi planet ( ) : 20
Jumlah gigi ring ( ) : +2. = 24+2.20= 64 Modul ( M ) : 2
Sudut tekan normal ( α ) : 20°
Roda Gigi Matahari
Z D M = p = M . Z Diameter pitch ( ) = M . Z = 2 . 24 = 48 mm Dimeter puncak ( ) = + 2. = 48 + 2.2 = 52 mm(Hp lihat tabel)
Diameter kaki ( )
= – 2 . = 48 – 2 . 2,333 = 43, 34 mm ( lihat tabel )
Jarak antar gigi ( t )
t x mm Z Dp 28 , 6 24 48 14 , 3 . = = π = Tebal gigi ( b ) b = ½ . t = ½ . 6,28 = 3,14 mm
Roda Gigi Ring
Z D M = p = M .Z Diameter pitch ( ) = M .Z = 2 . 64 = 128 mm Dimeter puncak ( ) = + 2. = 128 + 2.2 = 132 mm ( Hp lihat tabel ) Diameter kaki ( ) = – 2 . = 128 – 2 . 2,333 = 123,34 mm ( lihat tabel )
Jarak antar gigi ( t )
t mm Z Dp 28 , 6 64 128 . 14 . 3 . = = π = Tebal gigi ( b ) b = ½ . t = ½ . 6,28 = 3,14 mm
Roda Gigi Planet Z D M = p = M .Z Diameter pitch ( ) = M .Z = 2 . 20 = 40 mm Dimeter puncak ( ) = + 2. = 40 + 2.2 = 44 mm(Hplihat tabel) Diameter kaki ( ) = – 2 . = 40 – 2 . 2,333 = 35,34 mm ( lihat tabel )
Jarak antar gigi ( t )
t mm Z Dp 28 , 6 20 40 . 14 . 3 . = = π = Tebal gigi ( b ) b = ½ . t = ½ . 6,28 = 3,14 mm
Jarak Antara Sumbu Gigi Ring dan Sumbu Gigi Planet ( a )
2 pP pR D D a= − 2 44 128− = a
2 pP pR D D a = − 2 44 128− = a = 44 mm a = 44 mm
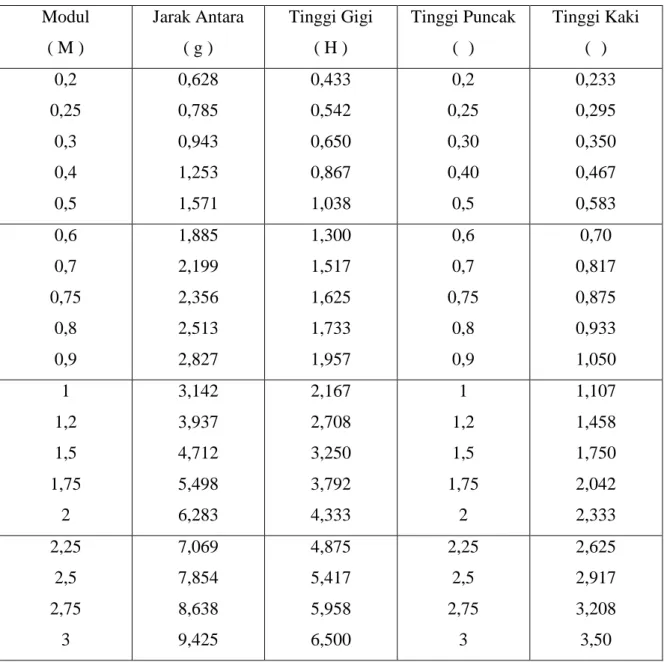
Tabel Modul dalam Perancangan Roda Gigi Modul ( M ) Jarak Antara ( g ) Tinggi Gigi ( H ) Tinggi Puncak ( ) Tinggi Kaki ( ) 0,2 0,25 0,3 0,4 0,5 0,628 0,785 0,943 1,253 1,571 0,433 0,542 0,650 0,867 1,038 0,2 0,25 0,30 0,40 0,5 0,233 0,295 0,350 0,467 0,583 0,6 0,7 0,75 0,8 0,9 1,885 2,199 2,356 2,513 2,827 1,300 1,517 1,625 1,733 1,957 0,6 0,7 0,75 0,8 0,9 0,70 0,817 0,875 0,933 1,050 1 1,2 1,5 1,75 2 3,142 3,937 4,712 5,498 6,283 2,167 2,708 3,250 3,792 4,333 1 1,2 1,5 1,75 2 1,107 1,458 1,750 2,042 2,333 2,25 2,5 2,75 3 7,069 7,854 8,638 9,425 4,875 5,417 5,958 6,500 2,25 2,5 2,75 3 2,625 2,917 3,208 3,50
4 4,5 5 6 7 12,566 14,137 15,708 18,850 21,997 8,666 9,750 10,833 13,00 15,166 4 4,5 5 6 7 4,666 5,250 5,833 7 8,166 Perbandingan Putaran Persamaan Umum = 2 xVs VR ω = 2 . .RR S Rs R +ω ω = 2 S R R R + ω = S R S R R R R Rs R + ω + ω . . = 24 64 . 24 . 64 + ω + ωR S
Pada Kondisi Poros Roda Gigi Ring diam (ω = 0)
VR
VS
= ½ ω = p p R V = ω . ω = Rs Vs = ω . ω . = ½ . ω . ω = p s s R R . 2 . ω ω = 44 . 2 24 . s ω ω = 0,27 ω ; jadi perbandingan ω : ω= 1 : 3,6
3. Pada Kondisi Poros Roda Gigi Planet diam (ω = 0)
= ω . = ω . ω = p s s R R . ω VS VP VR
ω = 24 40 . + s ω = 0,37 ω ; jadi perbandingan ω : ω = 1 : 2,6
4. Pada Kondisi Poros Roda Gigi Matahari diam (ω = 0)
= ½ ω . = ½ . ω . ω = p R R R R . 2 . ω ω = 44 . 2 64 . R ω ω = 0,72 ω ; jadi perbandingan ω : ω = 1 : 1,3
BAHAN DAN METODA
Metode perancangan dalam penelitian ini didapat dari hasil survey tentang mobil listrik dan hybrid juga dari buku-buku yang berhubungan dengan perancangan mesin tersebut, diantaranya buku Gambar Teknik, Mekanika Teknik, Elemen Mesin, dan lain-lain. Dari hasil survey dan kajian pustaka maka didapat sebuah desain gear box system planetary adapun desainnya adalah sebagai berikut :
KESIMPULAN
Dalam sistem planetary gear box terdapat 3 (tiga) perbandingan putaran apabila salah satu poros roda gigi di rem, jadi sistem planetary gear box merupakan sistem transmisi yang paling sederhana untuk sebuah mobil listrik ataupun mobil hybrid.
DAFTAR PUSTAKA
1. George Granger Brown, Unit Operations, Japan
2. Joseph E. Shigley Larry D. MitChel, 1995. Perencanaan Teknik Mesin Edisi 4 Jilid 2. 3. Ken Hurst, Rotary Power Transmission Desain. SEED
4. Metrologie, Mitutoyo .MGF.CO. LTD. Tokyo Japan
5. Robert H. Richards, S.B., 1940. Ore Dressing, New York & London
6. Rochim, T, 1993. Proses Pemesinan, Higher Education Development support project, Jurusan Teknik Mesin FTI-ITB Bandung.
7. .sunandplanetgaer.