8
BAB II LANDASAN TEORI
2.1.
FLAPPING WING
Pergerakan dasar sayap burung di antaranya adalah:
• Kepakan (flapping), yaitu gerakan ke atas-ke bawah ujung sayap dengan pusat gerakan pada tubuh burung.
• Twisting, yaitu gerakan mengubah distribusi sudut serang per bagian sayap dari root (bagian yang menempel di bahu burung) sampai tip (bagian paling ujung luar sayap).
• Mengangkat dan melepas (pulling & dragging), yaitu pergerakan ujung sayap (ke atas atau ke bawah) selama burung terbang dengan ada atau tidak adanya gaya otot sayap burung.
• inklinasi (inclination) – untuk bidang gerakan sayap (stroke plane) – hal ini ditentukan dari sudut inklinasi dari sumbu aksis pergerakan sayap. Inklinasi berhubungan dengan sudut sumbu pergerakan sayap di bagian depan terhadap bidang datar tubuh burung dan sudut sumbu aksis tubuh tersebut terhadap arah terbang.
• Belokan (turning) root sayap, terutama ketika thrust digunakan sebagai gaya utama untuk terbang dan kebanyakan arahnya sesuai dengan sudut twist sayap.
• Sweeping, khususnya untuk bagian terluar sayap (outboard wing section). Gerakan ini terutama terjadi selama pergerakan ujung sayap (ke atas) yang disertai dengan pergerakan ujung sayap (tip) ke belakang. Pada umumnya, gerakan ini (multiple sweepings) terjadi secara bersamaan di sepanjang setengah span sayap dan terus berlangsung selama pergerakan ujung sayap (ke atas).
Gerakan mengepak (flapping) sangat diperlukan untuk menghasilkan gaya dorong (thrust). Selain itu, gerakan twist juga turut mempengaruhi besarnya thrust yang dihasilkan oleh gerakan sayap. Gerakan turning, sweeping, dan pulling bagian terluar sayap digunakan untuk menambah efisiensi, tetapi masih
9 terdapat persepsi yang kabur mengenai efek dari gerakan (turning, sweeping, dan pulling) tersebut.
Secara sederhana, kepakan sayap burung berbentuk gerakan bolak-balik (sinusoidal) ke atas-ke bawah dan selama pergerakan ini , sayap bergerak seperti bluff body. Bluff body menghasilkan drag sebagai komponen utama gaya fluida yang dapat diubah menjadi komponen thrust dan gaya angkat. Oleh karena itu, kepakan sayap burung tidak hanya menciptakan gaya angkat secara terus-menerus, tetapi juga menghasilkan gaya ke depan (thrust) dan ke atas untuk melawan gaya berat dan gaya hambat (drag).
Kepakan sayap burung meliputi dua buah tahap, yaitu: tahap ke bawah (down-stroke) dan tahap ke atas (up-(down-stroke). Burung mengubah sudut serang sayap selama kedua tahap tersebut berlangsung. Sudut serang sayap bertambah besar selama tahap down-stroke dan terus berkurang pada saat tahap up-stroke. Oleh karena itu tahap ke bawah menghasilkan gaya angkat yang lebih besar daripada tahap ke atas atau saat kondisi terbang cruise.
Besarnya gaya dorong (thrust) total sayap bertambah ketika perbedaan distribusi gaya angkat (antara tahap up dan down-stroke) semakin besar. Hal ini terutama terjadi pada wilayah sayap bagian luar (outboard wing area), yaitu wilayah dimana efek thrust bekerja. Jika perbedaan sama dengan nol, gaya hambat sama dengan gaya propulsi dan saling melawan sehingga thrust sama dengan nol. Jika terdapat perbedaan distribusi gaya angkat (tidak sama dengan nol), thrust akan terus bertambah dengan bertambahnya frekuensi kepakan sayap, tetapi setelah itu, gaya angkat yang terjadi akan mengecil.
Besarnya gaya angkat juga dipengaruhi oleh sudut incidence dari wing root. Seperti halnya perubahan sudut-sudut yang lain (twist dan sudut serang), perubahan sudut incidence ini akan mempengaruhi besarnya vorteks yang terjadi di belakang sayap (atau di arah yang berlawanan dengan arah terbang).
10
2.2.
MIKROKONTROLER
Awal munculnya robot dimulai dari pembuatan patung yang dapat dipindah-pindahkan oleh bangsa Yunani kuno. Kemudian (sekitar 270 SM), Ctesibus, seorang insinyur Yunani berhasil membuat piano dan jam air dengan komponen yang dapat dipindahkan (bongkar pasang). Pada zaman Nabi Muhammad SAW pun, banyak orang membuat mesin perang yang menggunakan roda dan dapat melontarkan bom.
Pada tahun 1770, Pierre Jacquet Droz, seorang pembuat jam berkebangsaan Swiss membuat tiga boneka mekanis. Boneka tersebut dapat melakukan suatu fungsi spesifik seperti menulis, memainkan musik dan piano, dan menggambar.
Pada tahun 1898, Nikola Tesla membuat sebuah boat yang dikontrol melalui radio remote control dan didemokan di Madison Square Garden. Namun usaha untuk membuat autonomous boat (tanpa remote control) gagal karena masalah dana.
Dan akhirnya pada tahun 1970, Profesor Victor Scheinman dari Universitas Stanford berhasil mendesain lengan robot standar dengan konfigurasi yang unik. Konfigurasi kinematik lengan tersebut sangat berguna bagi penelitian robotik selanjutnya dan menjadi pendorong munculnya robot-robot autonomous, seperti robot ASIMO (Honda) dan AIBO (Sony) pada tahun 2000.
Gambar 2. 1. Robot tangan
Setiap robot memerlukan suatu pengendali untuk setiap gerakan yang dibuatnya, baik gerakan autonomous maupun gerakan yang berdasarkan pada suatu instruksi tertentu. Pengendali ini harus dapat mengendalikan semua bagian robot supaya robot bergerak sesuai dengan tujuan yang ingin dicapai.
11 Dalam rangkaian pengendali tersebut, terdapat suatu otak yang mampu memroses berbagai instruksi input dan output serta proses logika. Oleh karena itu, robot dapat bergerak berdasarkan instruksi yang ada pada otak ini. Otak tersebut memiliki ukuran dan jenis yang beraneka ragam, dan sering disebut sebagai microprocessor atau microcontroller.
Microprocessor, dalam bahasa Indonesia sering disebut sebagai pengolah mikro (processor=pengolah; mikro), merupakan sebuah chip rangkaian terintegrasi (IC) yang berfungsi sebagai pengontrol atau pengolah kerja utama dalam suatu rangkaian elektronik. Chip tersebut juga dapat mengolah data dari input yang diterima pada suatu sistem digital. Karena berfungsi sebagai pengolah utama, microprocessor sering disebut sebagai CPU (Central Processing Unit). Cara kerja microprocessor dalam suatu rangkaian elektronik diarahkan oleh suatu program dalam bahasa mesin (machine language/assembly) yang telah dimasukkan terlebih dahulu ke dalam memori sistem rangkaian berbasis microprocessor. Sebuah rangkaian elektronik berbasis microprocessor paling tidak terdiri dari rangkaian-rangkaian digital, memory/register, pengolah logika aritmatika, dan rangkaian kontrol operasi sekuensial.
Microcontroller merupakan sebuah chip yang terdiri dari CPU, rangkaian-rangkaian digital, memory/register, pengolah logika aritmatika, dan rangkaian-rangkaian kontrol operasi sekuensial. Dengan kata lain, microcontroller merupakan keseluruhan komputer yang dibuat dalam satu chip. Berbeda dengan microprocessor (yang membutuhkan komponen eksternal digital, memori, dll), microcontroller dapat mengolah input dari suatu sistem digital tanpa perlu menambah rangkaian eksternal lainnya. Jadi, dengan sebuah chip microcontroller, peralatan elektronika seperti Air Conditioner, audio/video, video game, remote control, dll, dapat dikendalikan dengan mudah.
Microcontroller membutuhkan dua hal yang sama pentingnya, yaitu hardware (perangkat keras) dan software (perangkat lunak). Pada dasarnya microcontroller adalah suatu rangkaian elektronika digital dalam satu kemasan
12 berupa sebuah IC. Namun, rangkaian microcontroller tidak seperti rangkaian-rangkaian elektronika analog atau digital biasa yang kita kenal, yang langsung dapat bekerja cukup dengan rangkaian fisik. Microcontroller tak akan berguna dalam rangkaian apabila tidak disertai dengan program yang dapat mengatur cara kerja microcontroller tersebut. Oleh karena itu, pengetahuan tentang perangkat keras dan perangkat lunak sangat diperlukan untuk menghasilkan rangkaian microcontroller yang tepat dan sesuai dengan kebutuhan.
Pada dasarnya, sebuah chip microcontroller terdiri dari:
• CPU
CPU terdiri atas dua bagian, yaitu unit pengendali (control unit) dan unit aritmetika dan logika (Arithmetic Logic Unit, ALU). Unit aritmetika dan logika berfungsi untuk melakukan proses perhitungan yang diperlukan selama program dijalankan serta mempertimbangkan suatu kondisi dan mengambil keputusan yang diperlukan untuk instruksi-instruksi berikutnya. Fungsi utama unit pengendali adalah mengambil, mengodekan, dan melaksanakan urutan instruksi sebuah program yang tersimpan dalam memori. Unit pengendali menghasilkan dan mengatur sinyal pengendali yang diperlukan untuk menyerempakkan operasi, aliran, dan instruksi program. Dengan kata lain, unit pengendali bertugas untuk mengatur kegiatan rangkaian memory dan ALU dengan dasar hubungan bus dan dengan spesifikasi tertentu sesuai dengan desain operasi microcontroller-nya.
• Bus
Bus dalam microcontroller terdiri dari satu atau lebih line (jalur), tergantung dari jenis microcontroller tersebut. Bus tersebut terdiri atas address bus, control bus, dan data bus.
Address bus berfungsi sebagai sejumlah saluran pengalamatan antara alat dengan sebuah komputer. Pengalamatan ini harus ditentukan terlebih dahulu untuk menghindari terjadinya kesalahan pengiriman instruksi dan terjadinya bentrok antara dua buah alat yang bekerja secara bersamaan. Address bus hanya berfungsi sebagai output, misalnya sebuah address bus
13 terdiri dari 16 jalur, maka setiap jalur memiliki fungsi yang sama dengan output dan bekerja serentak untuk membentuk logika biner 16-bit.
Data bus merupakan sejumlah lintasan saluran keluar-masuknya data dalam suatu microcontroller. Pada umumnya saluran data yang masuk sama dengan saluran data yang keluar. Data bus dapat berfungsi sebagai input maupun output (bidirectional). Setiap jalur pada data bus memiliki fungsi yang sama dan bekerja serentak. Lebar atau jumlah jalur pada data bus ini biasanya dijadikan sebagai acuan penyebutan: berapa bit kemampuan suatu CPU. Bila pada suatu saat data bus berfungsi sebgai output maka semua jalur akan membentuk suatu logika biner dan berlaku sebagai output. Misalnya data bus terdiri dari 8 jalur maka logika biner yang dibentuk oleh data bus tersebut terdiri dari 8 bit sehingga memiliki variasi dari 0 sampai dengan 255 dalam desimal.
Control bus berfungsi untuk menyerempakkan / mengendalikan operasi microcontroller dengan operasi rangkaian luar dan dapat berfungsi sebagai output dan input. Namun, berbeda dengan data bus, setiap jalur pada control bus memilik fungsi yang berlainan. Bila berfungsi sebagai jalur kontrol dari CPU ke rangkaian luat maka ia berlaku sebagai output. Bila berfungsi sebagai jalur kontrol dari rangkaian luar ke CPU maka ia berlaku sebgai input. Pada umumnya, masing-masing CPU memiliki control bus yang khas dan berbeda-beda, baik dalam jumlah jalur maupun fungsi.
• Memory
Sampai awal dekade abad 21 ini, telah dikenal banyak sekali perangkat memori yang digunakan dalam sistem rangkaian elektronik. Untuk perangkat memori orde besar dan portabel dikenal mulai dari disket, harddisk, ramcard, memory-stick, pen-drive, mobile disk, CDROM/RW, streamer cassette tape, dan beberapa perangkat yang diberi nama khusus oleh produsennya. Untuk memori berupa chip IC yang terpasang tetap dalam rangkaian, telah dikenal mulai dari IC RAM (Random Access Memory), ROM (Read Only Memory), PLD (Programmable Logic Device), dan PAL
14 (Programmable Array Logic) seperti FPGA, ataupun embedded (flash) memory product yang lain. Jenis-jenis RAM dapat dibagi lagi menjadi: static RAM, dynamic RAM, dan flash RAM. Jenis ROM juga dapat dibagi menjadi programmable ROM (PROM), Ultraviolet Erasable Programmable ROM (UVEPROM), Electrically Erasable Programmable ROM (EEPROM), Flash (R/W) Memory dalam embedded controller, dan beberapa jenis EPROM khusus.
Jenis memori yang menjadi komponen pokok microcontroller adalah ROM dan RAM. ROM merupakan memori yang hanya dapat dibaca. Data yang disimpan dalam ROM tidak akan hilang meskipun sumber tegangan dihilangkan (mati). Dari sifatnya itu, ROM sering dipakai untuk menyimpan program. Sedangkan RAM merupakan memori yang dapat dibaca dan ditulis. RAM biasanya digunakan untuk menyimpan data saat program bekerja. Data yang ada dalam RAM akan hilang bila catu daya dari RAM dimatikan sehingga RAM hanya dapat digunakan untuk menyimpan data sementara.
Kemajuan teknologi memory chip yang ditandai meningkatnya kapasitas memori dan mengecilnya dimensi ini juga telah berkembang pesat dalam bentuk dan fungsi spesifik yang sejalan dengan kebutuhan peralatan atau komputer khusus, seperti palm/laptop, handphone, peralatan multimedia/audio-video hingga super-computer. Walaupun memiliki fungsi dan nama yang berbeda-beda, teknologi memori ini sebenarnya memiliki sistem yang serupa, yaitu penggunaan teknologi flash memory yang mempunyai kecepatan sangat tinggi.
• I/O (input /output)
Unit ini berfungsi agar microcontroller dapat berkomunikasi dengan perangkat eksternal baik secara serial maupun pararel. Unit ini sangat diperlukan supaya microcontroller dapat memperoleh instruksi atau data dari perangkat eksternal lain seperti komputer atau peralatan digital lainnya. Dengan adanya unit ini, microcontroller dapat mengirim dan
15 menerima data/instruksi dari dan ke perangkat lain dengan mudah serta dapat melakukan perhitungan matematis berdasarkan data/instruksi tersebut.
• Timer/clock
Clock merupakan salah satu syarat utama agar CPU dapat bekerja. Kerja clock ini seperti kerja jantung pada manusia dimana tiap detakan jantung merupakan picu terhadap kerja tiap instruksi program CPU. Dengan adanya pulsa-pulsa clock (detak), bus dalam microcontroller dapat bekerja bersama-sama secara sekuensial. Perubahan logika clock juga akan memicu perubahan logika-logika pada bus (dalam microcontroller) sesuai dengan program yang ada di dalamnya.
• Interrupt controller
Interrupt controller sangat berhubungan erat dengan perilaku perangkat eksternal yang dihubungkan dengan microcontroller. Unit ini akan selalu memperhatikan perubahan yang terjadi pada input/output perangkat eksternal selama microcontroller menjalankan (running) suatu proses. Jika terjadi perubahan logika pada properti output perangkat eksternal (terjadi request), interrupt controller akan memberitahu CPU untuk menjalankan proses yang sesuai dengan request tersebut. Dengan adanya interrupt controller ini, microcontroller dapat bereaksi dengan cepat terhadap perubahan logika atau instruksi (request) dari perangkat eksternal yang berhubungan dengan I/O microcontroller tersebut.
Berdasarkan hal-hal di atas, dapat disimpulkan bahwa microcontroller merupakan suatu rangkaian digital yang dirancang dengan teknologi VLSI (Very Large Scale Integration) sedemikian rupa dengan dimensi yang sangat kecil dan dibuat dalam satu chip IC (integrated circuitI). Microcontroller berfungsi untuk menyelesaikan suatu permasalahan fenomena digital dengan fungsi yang dikontrol melalui program. Seperti halnya komponen-komponen IC digital yang lainnya, microcontroller memiliki bagian input dan memiliki bagian-bagian output, tetapi bagian-bagian output tersebut tidak dinyatakan secara langsung
16 sebagai fungsi inputnya. Dengan kata lain, tidak seperti IC digital biasa, tiap microcontroller memiliki ciri-ciri khas dalam mengolah input-inputnya yang dikenal sebagai bahasa mesin dari microcontroller tersebut.
Mikrokontroler (microcontroller) pada penelitian ini berfungsi sebagai pengendali utama bagi semua proses pada pergerakan model uji. Model uji tersebut merupakan bagian dari sebuah rancangan besar sistem eksperimental di Laboratorium Teknik Penerbangan Institut Teknologi Bandung, terutama untuk ekperimental DPIV dan kepakan sayap. Mikrokontroler ini dapat digunakan untuk mengendalikan servo dan motor serta dapat ditambahkan sensor untuk mengoreksi gerakan servo dan motor tersebut. Mikrokontroler yang dimaksud adalah berupa rangkaian elektronika dengan sebuah mikrokontroler AVR ATMega8535 sebagai komponen utamanya.
Mikrokontroler AVR ATMega8535 merupakan mikrokontroler 8-bit yang menggunakan arsitektur RISC. Spesifikasi yang ada pada mikrokontroler ini antara lain sebagai berikut:
• Konsumsi daya yang relatif rendah.
• Kapasitas 8K-Bytes In-System Programmable Flash. • 512-Bytes EEPROM dan 512-Bytes SRAM internal. • SPI interface untuk mode In-System Programming. • Real time counter dengan separated oscillator. • 4 buah kanal PWM.
• 8 kanal, 10bit ADC.
17 Gambar 2. 2. Konfigurasi pin ATMega8535
Lebih lanjut mengenai mikrokontroler ini dapat dilihat dalam datasheet yang dapat diunduh di www.atmel.com. Sedangkan downloader yang digunakan untuk memasukkan program ke dalam mikrokontroler ini adalah DT-AVR low cost micro system.
2.3.
MOTOR
Untuk memungkinkan terjadinya pergerakan pada sistem robot, dibutuhkan suatu penggerak yang dapat dikendalikan berdasarkan instruksi dari otak sistem robot tersebut. Penggerak tersebut di antaranya motor DC, servo motor, dan stepper motor.
2.4.1. Motor DC
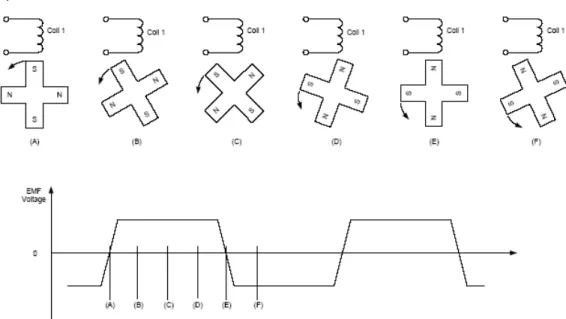
Motor DC terdiri atas magnet permanen dan coil dan bergerak dengan menggunakan arus searah (DC). Gerakan dibangkitkan oleh coil yang dihubungkan ke sumber arus. Ketika dilalui sumber arus, coil akan menarik / mendorong magnet permanen yang terdapat di dalam motor DC sehingga terjadi putaran. Arah putaran motor DC tergatung pada jenis arus yang masuk pada sisi-sisi coil. Jenis arus (positif atau ground) yang masuk pada sisi-sisi coil akan menimbulkan medan magnet dengan sisi-sisi coil sebagai kutub-kutub magnetnya. Jika jenis arus pada sisi coil diubah, kutub magnet (pada sisi-sisi coil) akan berubah dan gerakan magnet permanen pada motor juga akan berubah.
18 Gambar 2. 3.Diagram coil pada motor DC
Besarnya kecepatan putaran motor DC tergantung pada besarnya arus yang masuk dan jumlah gulungan pada coil serta tergantung pada karakteristik motor DC yang dibuat. Jika arus yang masuk semakin besar, kecepatan putaran akan semakin besar pula. Tentu saja terdapat batasan besarnya arus yang dapat masuk pada coil.
Keuntungan dari penggunaan motor DC adalah:
• lebih mudah dipahami (karena penggunaan arus DC);
• lebih mudah dikendalikan (cukup mengubah hubungan sisi coil dengan jenis arus yang diinginkan);
• lebih murah.
Pengendalian motor DC meliputi pengendalian arah dan pengendalian kecepatan putaran. Pengendalian arah putaran merupakan pengendalian jenis arus yang masuk pada motor DC, sedangkan pengendalian kecepatan merupakan pengendalian besarnya tegangan / arus yang masuk pada coil motor DC.
2.4.1.1. Pengendalian Arah
Pada dasarnya pengendalian ini merupakan pembuatan suatu sistem yang memiliki switch / konektor yang dapat menukar jenis arus pada sisi-sisi coil motor DC. Salah satu sistem yang dapat digunakan adalah H-Bridge.
19 Gambar 2. 4. Skema H-Bridge
Arah putaran motor yang tercipta dari sistem di atas dapat dijelaskan sebagai berikut:
• Jika switch 1 dan 4 tertutup, 2 dan 3 terbuka, arus akan mengalir dari sumber tegangan, switch 1, ke motor, switch 4 dan ground.
• Jika 2, 3 tertutup dan 1,4 terbuka, arus akan mengalir dari sumber tegangan, switch 3, motor, switch 2 dan ground.
Perwujudan H-Bridge dalam rangkaian elektronika dapat dibentuk dengan menggunakan rangkaian transistor sebagai berikut:
Gambar 2. 5. Rangkaian transistor H-Bridge
Dalam rangkaian tersebut, keempat switch digantikan dengan empat transistor (terdapat di dalam). Dua transistor luar digunakan untuk mengatur supaya switch 1—4 atau 2—3 terbuka atau tertutup secara bersamaan. Control pin dihubungkan dengan peralatan elektronika yang dapat mengirimkan pulsa high-low ke rangkaian H-Bridge tersebut. Jika control pin bernilai high, transistor yang bersangkutan akan enable (switch tertutup, arus mengalir pada transistor). Jika bernilai low, arus tidak akan mengalir pada transistor (switch terbuka).
20 Rangkaian elektronika ini telah dikemas dalam satu IC. Jenis IC dengan fungsi H-Bridge telah banyak beredar dan dikembangkan dengan kelebihan dan kekurangannya masing-masing. Pada penelitian ini, IC yang digunakan adalah L293D.
2.4.1.2. Pengendalian Kecepatan
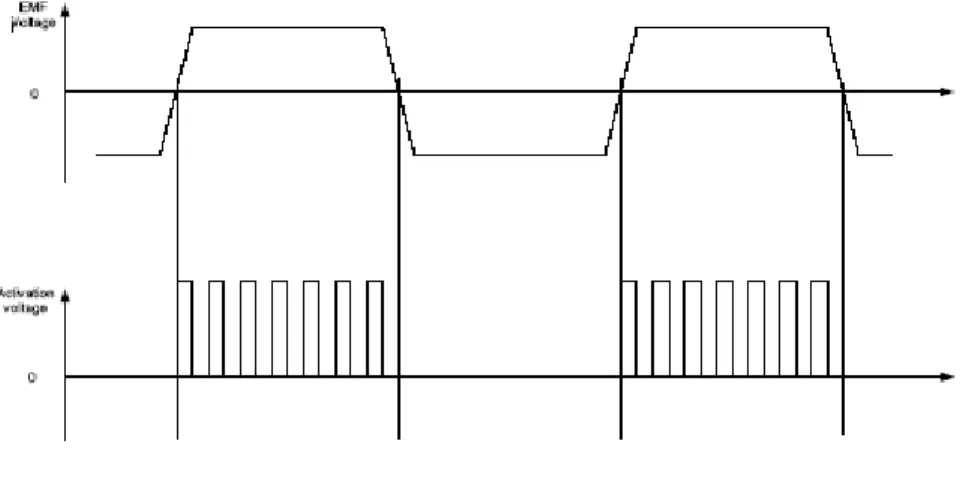
Pengendalian kecepatan dilakukan dengan mengatur PWM (pulse width modulation) yang masuk pada control pin. Pulsa high-low (hi-lo) yang terkirim ke control pin berupa serangkaian sinyal pulsa tertentu. Pulsa ini sangat menentukan besarnya EMF (Electromotive force) yang bekerja pada motor. EMF merupakan tegangan yang terjadi pada induktor (coil) yang ditimbulkan oleh medan magnetik (oleh magnet permanen) dan digunakan untuk menggerakkan poros motor.
21 Gambar 2. 7. Pulsa dan EMF
Kecepatan putaran motor DC sebanding dengan EMF. Jika EMF turun terlalu jauh, motor DC tidak memiliki tenaga yang cukup untuk melakukan putaran. Dengan lebar EMF tertentu, motor DC akan berputar dengan kecepatan sesuai dengan EMF yang terjadi.
Pengaturan PWM berarti pemberian pulsa high-low (motor on-off) pada motor dengan suatu rentang waktu tertentu. Atau dengan kata lain, mematikan dan menghidupkan motor pada suatu rentang waktu tertentu (sangat cepat) akan membentuk pulsa hi-lo dan menghasilkan EMF. Hal ini dapat dijelaskan dengan contoh berikut:
1. Ketika siklus kerja motor DC (kecepatan on-off) tinggi akan timbul EMF sebesar 50% dari tegangan sumber.
22 2. Ketika siklus kerja motor DC berkurang, EMF yang timbul hanya sebesar
seperempat tegangan sumber.
Gambar 2. 9. Siklus kerja (EMF < 50%) 2.4.2. Servo motor
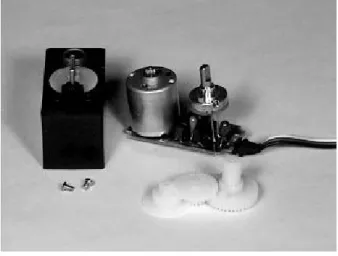
Gambar 2. 10. Servo
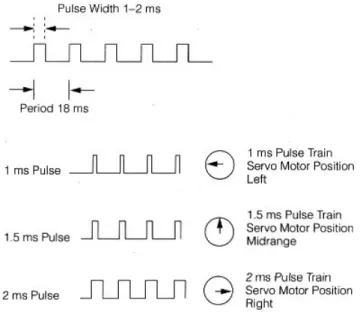
Servo motor DC pada dasarnya adalah motor DC dengan suatu mekanisme positional control feedback (feedback potentiometer) yang dapat mengatur posisi shaft dalam servo. Shaft servo dapat berotasi dan dapat berada pada posisi dari 0o sampai 360o (tergantung pada jenis servo). Pada umumnya servo beroperasi pada tegangan +4 sampai +6 volt DC melalui 3 buah kabel yang terhubung dengan rangkaian elektronika di dalamnya (voltage, ground, dan sinyal input). Posisi servo dapat dikendalikan melalui pemberian input pulsa berfrekuensi 50 Hz dengan lebar hi pulsa sebesar 1-2 ms.
23 Gambar 2. 11. Sinyal input kendali servo motor
Servo motor DC yang dimaksud di atas adalah motor RC (radio control) servo. Pada beberapa referensi, ada istilah yang menyangkut motor DC servo dan dibedakan dengan istilah motor RC servo. Hal tersebut dikarenakan adanya beberapa teknik pengaturan posisi dan kecepatan servo yang berbeda-beda. Berbeda dengan motor RC servo (yang telah dijelaskan pada paragraf sebelumnya), motor DC Servo (DC-SV) merupakan motor DC-MP (magnet permanen) dengan kualifikasi khusus yang sesuai dengan aplikasi servoing di dalam teknik kontrol.
Tidak ada spesifikasi baku yang disepakati untuk menyatakan bahwa suatu motor DC-MP adalah motor DC-SV. Namun secara umum dapat didefinisikan bahwa motor DC-SV harus memiliki kemampuan yang baik dalam mengatasi perubahan yang sangat cepat dalam hal posisi, kecepatan dan akselerasi. Motor DC-SV juga dikehendaki handal beroperasi dalam lingkup torsi yang berubah-ubah.
Kedua jenis servo (DC dan RC) tersebut sebenarnya memiliki perbedaan yang sangat kecil, bahkan keduanya terkadang dianggap sama dalam pasar elektronika.
24 2.4.3. Stepper motor
Stepper motor dapat digunakan untuk daya gerak, pengarah dan pengendali posisi robot. Motor ini adalah komponen yang terintegrasi sebagai alat kendali komputer untuk industri. Pada motor ini terdapat pin-pin saluran yang harus dihubungkan dengan suatu sistem digital. Dengan mengubah nilai masing-masing pin tersebut (dalam bentuk bilangan biner), pergerakan motor dapat dikendalikan. Stepper motor memiliki variasi baik bentuk, ukuran maupun spesifikasinya dan dapat disesuaikan dengan kebutuhan.
Sistem kerja stepper motor sangat sederhana. Ketika tenaga listrik dialirkan, rotor di dalam stepper motor mulai bergerak secara lembut. Pergerakan ini tergantung pada sistem digital (yang masuk dari masing-masing saluran pada stepper motor) dengan kecepatan dan peletakan rotor yang sesuai dengan tenaga listrik masuk. Namun, kelemahan dari stepper motor ini adalah peletakan posisi rotor secara tepat tidak akan mungkin dilakukan karena rotor selalu berputar ketika ada aliran listrik masuk.
Tidak semua stepper motor memutar rotor dengan nilai yang sama tiap langkahnya. Stepper dibuat dengan derajat rotasi yang berbeda-beda per langkahnya. Untuk menghasilkan derajat rotasi yang optimal sangat tergantung dari penggunaan stepper itu sendiri. Contoh derajat rotasi yang mungkin terbentuk antara lain 72 derajat dan 22,5 derajat. Putaran stepper sendiri tergantung dari nilai digital yang diberikan ke stepper tersebut.
2.4.
KOMUNIKASI SERIAL ANTARPERANGKAT KERAS
Serial port komputer merupakan suatu gerbang komunikasi antara komputer dengan suatu perangkat keras di luarnya. Port ini dapat mengirimkan data dengan kecepatan dan besar bit tertentu ke target yang diinginkan. Untuk mengirimkan atau menerima data tersebut, serial port memerlukan suatu perangkat lunak yang dapat mengatur aliran data. Salah satu perangkat lunak tersebut adalah MATLAB.
Pada umumnya, nama serial port pada komputer adalah COMX (COM1, COM2, dan seterusnya) dan peralatan yang dapat digunakan dalam komunikasi serial
25 tersebut adalah RS-232. Standard RS-232 menentukan dua perangkat yang dihubungkan melalui kabel serial sebagai Data Terminal Equipment (DTE) dan Data Circuit-Terminating Equipment (DCE). Dalam pembahasan ini, komputer berlaku sebagai DTE dan microcontroller sebagai DCE.
Sinyal serial pada RS-232 adalah sinyal kontrol dan sinyal data. Sinyal kontrol digunakan untuk mengatur aliran data serial (mengirim/menerima, data siap diambil/tidak,dll). Sinyal data berisi data komunikasi antara DTE dan DCE.
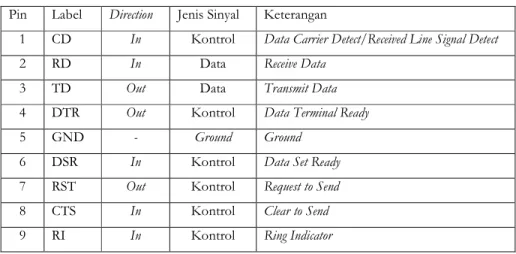
Pada RS-232 terdapat 9 pin yang memiliki tugas sebagai berikut: Tabel 2. 1. Konfigurasi Pin RS-232
Pin Label Direction Jenis Sinyal Keterangan
1 CD In Kontrol Data Carrier Detect/Received Line Signal Detect
2 RD In Data Receive Data
3 TD Out Data Transmit Data
4 DTR Out Kontrol Data Terminal Ready
5 GND - Ground Ground
6 DSR In Kontrol Data Set Ready
7 RST Out Kontrol Request to Send
8 CTS In Kontrol Clear to Send
9 RI In Kontrol Ring Indicator
Gambar 2. 12. Pin kabel serial
Keterangan mengenai fungsi pin saluran RS-232 adalah sebagai berikut: 1. Received Line Signal Detect, Saluran ini memberitahukan bahwa pada
terminal masukan ada data masuk.
2. Received Data, digunakan untuk menerima data masuk. 3. Transmit Data, digunakan untuk mengirimkan data.
4. Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan terminalnya.
26 5. Ground, digunakan untuk pentanahan (ground).
6. Data Set Ready, sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah siap.
7. Request to Send, dengan saluran ini DCE diminta mengirimkan data oleh DTE.
8. Clear to Send, dengan saluran ini DCE memberitahukan bahwa DTE boleh mulai mengirimkan data.
9. Ring Indicator, pada saluran ini DCE memberitahu DTE bahwa sebuah stasiun (terminal) menghendaki hubungan dengannya.
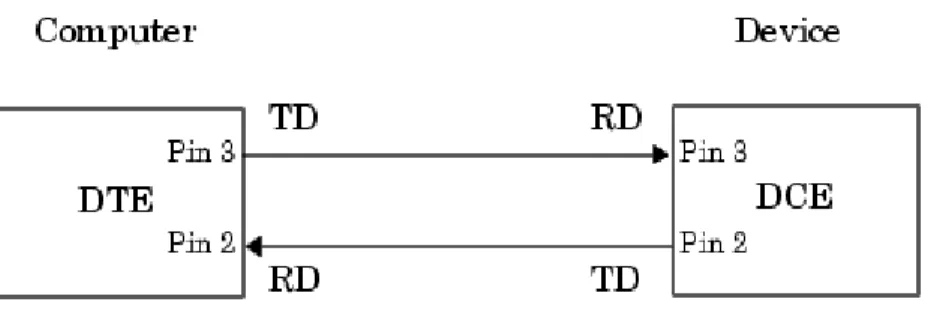
Pin RD dan TD pada DCE dan DTE harus saling berhubungan untuk dapat melakukan pengiriman dan penerimaan data.
Gambar 2. 13. Hubungan antarpin DTE dan DCE
Dengan menghubungkan pin-pin tersebut (dari komputer ke microcontroller), komputer dapat mengirimkan instruksi ke mikrokontroler (otak robot). Program di dalam mikrokontroler akan mengolah instruksi tersebut dan mengirimkan respon kepada komponen robot lainnya. Akibatnya, robot akan bergerak sesuai dengan instruksi yang telah dikirim oleh komputer.