i
ALAT PENGUKUR KECEPATAN ANGIN PADA GEDUNG
BERBASIS MIKROKONTROLLER AT89S51
Penyusun : Rico Arizona
Pembimbing I : Basuki Rahmat,S.Si MT Pembimbing II : Fetti Try Anggraeni S,kom
ABSTRAK
Angin secara umum adalah setiap gerakan udara relatif terhadap permukaan bumi. Dalam pengertian teknis, yang dimaksud dengan angin adalah setiap gerakan udara yang mendatar atau hampir mendatar. Angin mempunyai arah dan kecepatan yang ditentukan oleh adanya perbedaan tekanan udara dipermukaan bumi. Angin bertiup dari tempat bertekanan tinggi ke tempat bertekanan rendah. Semakin besar perbedaan tekanan udara semakin besar kecepatan angin. Untuk keperluan ilmu pengetahuan, khususnya mengenai Metereologi dan geofisika diperlukan suatu alat yang dapat mengukur kecepatan angin. Dalam tugas akhir ini, dibuat perangkat keras yaitu untuk mengukur kecepatan angin.
Alat yang digunakan untuk mengukur kecepatan angin menggunakan transistor sebagai pengukur kecepatan angin. Alat ini dibuat sedemikian hingga dapat mengukur kecepatan angin minimal 00,1 KM/Jam. Dan LCD 2x16 merupakan output dari hasil yang diukur sebelumnya pada alat pengukur kecepatan angin ini.
ii
KATA PENGANTAR
Dengan memanjatkan puji dan syukur kehadirat Allah SWT, atas berkat dan
rahmat-Nya yang telah dilimpahkan kepada penyusun sehingga terbentuklah suatu
Tugas Akhir yang berjudul “Alat pengukur kecepatan angin pada gedung berbasis mikrokontroller AT89S51”, untuk memenuhi salah satu syarat Ujian Akhir Sarjana di Fakultas Teknologi Industri Jurusan Teknik Informatika Universitas Pembangunan
Nasional “Veteran” Jatim.
Penulis menyadari bahwasanya dalam penyusunan Tugas Akhir ini masih
memiliki banyak kekurangan baik dari segi materi maupun dari segi penyusunannya
mengingat terbatasnya pengetahuan dan kemampuan penulis. Untuk itu, dengan
kerendahan hati penyusun mohon maaf dan penyusun sangat mengharapkan segala
saran dan kritikan yang sekiranya dapat membantu penyusun agar dalam penyusunan
selanjutnya bisa lebih baik lagi.
Surabaya, 25 mei 2011
iii
UCAPAN TERIMA KASIH
Tugas Akhir ini dapat penulis selesaikan berkat kerja sama dari
berbagai pihak, baik moril maupun materil. Dan tidak lupa penulis panjatakan
rasa syukur kehadirat Allah SWT, atas semua anugerah dan pertolongan yang
tak terkira dalam hidupku. Serta tidak terlupakan iringan salam dan sholawat
bagi junjungan kami Nabi besar Muhamad SAW.
Dan tidak lupa penulis ingin menyampaikan rasa hormat dan terima kasih
yang sebesar–besarnya kepada :
• Kedua orang tua dan keluarga penulis yang telah memberikan dukungan moril
maupun materil selama ini. Tetaplah iringi ananda dengan doa dan kasih
sayang. Doa putramu ini senantiasa kupanjatkan untuk kalian. Semoga Allah
senantiasa menjaga dan menyayanginya. Amin...
• Ir. Sutiyono, MT. selaku dekan Fakultas Teknologi Indutri Universitas
Pembangunan Nasional “Veteran” Jatim.
• Basuki Rahmat, S.Si., MT. selaku Ketua Jurusan Teknik Informatika
Universitas Pembangunan Nasional “Veteran” Jatim dan Dosen Pembimbing
I, yang telah meluangkan waktu untuk memberikan arahan dan memberi
motivasi sehingga penyusun dapat menyelesaikan Tugas Akhir ini.
iv
• Dosen – dosen Teknik Informatika UPN “Veteran” Jatim atas bimbingan dan
ilmunya.
• Teman-teman penulis yang tidak mungkin penulis sebutkan namanya satu per
satu terima kasih telah membantu dan memberikan do’anya kepada penulis
untuk menyelesaikan skripsi ini.
• Teman-teman satu daerah, yang senantiasa selalu memberikan motivasi
kepada penulis.
• Untuk Vemilia Karinda, SE. Yang tiada henti-hentinya memberikan semangat
dan do’anya, sehingga penulis termotivasi dalam menyelsaikan tugas akhir
ini.
• Rekan-rekan di Teknik Informatika UPN “Veteran” Jatim angkatan 2006
terutama kelas sore, juga teman- teman penyusun dari semua angkatan yang
secara tidak langsung telah membantu selama penyusunan tugas akhir ini.
• Dan semua pihak yang telah banyak membantu yang tidak bisa disebutkan
satu-persatu.
• Semoga keikhlasan dalam membantu hingga terselesaikannya laporan Tugas
PENDAHULUAN
1.1 Latar Belakang Masalah
Untuk keperluan ilmu pengetahuan, khususnya mengenai Kecepatan angin pada
gedung diperlukan suatu alat yang dapat mengukur kecepatan angin. Dengan
memperhatikan hal tersebut diatas, maka penulis tertarik untuk mengembangkan suatu
alat untuk mengukur kecepatan angin pada Gedung. Sensor yang diaplikasikan untuk
pengukur kecepatan angin ini yaitu sensor yang di rancang khusus dengan
menggunakan dua buah transistor sebagai pengukur kecepatan angin dan temperatur
suhu. mikrokontroller AT895S1 sebagai pusat pengolahan datanya yang hasilnya akan
ditampilkan pada LCD 2x16. Oleh karena itu penulis mengajukan judul tugas akhir ini
dengan judul “Alat Pengukur kecepatan Angin Pada Gedung Berbasis Mikrokontroller
AT895S1”.
1.2 Perumusan Masalah
Berdasarkan latar belakang tersebut, maka dapat diambil perumusan masalah
yaitu :
a. Bagaimana proses untuk membangun sebuah aplikasi pengukur kecepatan angin pada
gedung menggunakan mikrokontroller AT89S51.
b. Membuat suatu alat yang bekerja secara otomatis yang dapat mengukur kecepatan
angin pada gedung.
c. Bagaimana membangun sebuah aplikasi pengukur kecepatan angin pada gedung
1.3 Pembatasan Masalah
Karena luasnya materi, maka dilakukan beberapa pembatasan masalah, antara lain
yaitu :
a. Mikrokontroler yang digunakan adalah AT89S51.
b. Menggunakan bahasa pemrograman ASM (assembler).
c. Prototype yang dibuat menggunakan Transistor yang digunakan sebagai
pengukur kecepatan angin atau sensor.
d. Menggunakan LCD dan sebagai pemberi informasi kecepatan angin.
e. Prototype yang di rancang beroperasi mendeteksi kecepatan angin.
Tujuan dibuatnya batasan masalah adalah agar pokok-pokok permasalahan yang
di bahas tidak melenceng dari topik yang telah diangkat.
1.4 Tujuan
Tujuan dari penelitian ini adalah, Merancang dan membangun sistem
pengukur kecepatan angin pada gedung.
1.5 Manfaat
Manfaat yang diperoleh dari skripsi ini antara lain sebagai berikut:
a. Memberikan masukan terhadap pembangunan gedung dari segi kenyamanan,
tata letak, serta resiko yang di hasilkan oleh kecepatan angin terhadap gedung.
b. Untuk mengetahui penyebab dan akibat yang akan menimbulkan kerusakan
pada gedung akibat kecepatan angin.
c. Sebagai petunjuk dalam penentuan faktor keamanan dalam melakukan
pelayaran
1.6 Metodologi Pembuatan Skripsi
Pembuatan Skripsi terbagi menjadi beberapa tahapan sebagai berikut:
1. Perancangan perangkat keras serta perangkat lunak.
2. Pembuatan rangkaian elektronik dan rangkaian mikrokontroler
AT89S51.
3. Menguji coba rangkaian yang sudah dibuat.
4. Menganalisa masing-masing rangkaian dan menyimpulkan hasil
dari uji coba rangkaian.
5. Penyusunan Buku Skripsi
Pada tahap ini merupakan tahap terakhir dari pengerjaan Skripsi. Buku
ini disusun sebagai laporan dari seluruh proses pengerjaan Skripsi. Dari
penyusunan buku ini diharapkan dapat memudahkan pembaca yang ingin
menyempurnakan dan mengembangkan aplikasi lebih lanjut.
1.7 Sistematika Penulisan
Sistematika penulisan laporan tugas akhir ini dapat dijelaskan
seperti dibawah berikut ini :
BAB I : PENDAHULUAN
Pada bab kesatu berisi latar belakang yang menjelaskan tentang
latar belakang permasalahan, tujuan, manfaat, dan sistematika
penulisanyang digunakan dalam laporan Skripsi ini.
Pada bab kedua erisi teori penunjang yang menguraikan tentang teori–
teori yang mendukung dari bagian-bagian perangkat atau alat yang
dibuat.
BAB III : DESAIN DAN PERANCANGAN
Pada bab ketiga berisi hal-hal yang berhubungan dengan
perancangan dan pembahasan perangkat keras tentang alat yang
dibuat.
BAB IV : IMPLEMENTASI SITEM DAN ANALISA
Pada bab keempat memuat hasil pengamatan dan pembahasan dari
hasil pembuatan alat yang dibuat.
BAB V : HASIL DAN PEMBAHASAN
Pada bab kelima berisi penjelasan lingkungan uji cobia alat,
pelaksanaan uji coba dan evaluasi dari hasil uji coba yang telah
dilakukan untuk kelayakan pemakaian alat.
BAB VI : KESIMPULAN DAN SARAN
Pada bab keenam berisi kesimpulan dan saran untuk pengembangan
alat lebih lanjut dalam upaya memperbaiki kelemahan pada alat guna
untuk mendapatkan hasil kinerja alat yang lebih baik.
DAFTAR PUSTAKA
Berisi tentang literatur sebagai teori pendukung pembahasan pada
Tugas akhir ini.
DASAR TEORI
2.1 KERANGKA TEORI
Angin secara umum adalah setiap gerakan udara relatif terhadap permukaan
bumi. Dalam pengertian teknis, yang
dimaksud dengan angin adalah setiap gerakan udara yang mendatar atau hampir
mendatar. Angin mempunyai arah dan kecepatan
yang ditentukan oleh adanya perbedaan tekanan udara dipermukaan bumi. Angin
bertiup dari tempat bertekanan tinggi ke tempat bertekanan rendah. Semakin besar
perbedaan tekanan udara semakin besar kecepatan angin.
2.2 BEBERAPA MACAM ANGIN
Angin mempunyai kecepatan dan energi yang dapat mendorong benda-benda
yang dilewatinya. Kecepatan angin dinyatakan dalam km/jam, m/detik, atau dalam
knot ( 1 knot = 1 mil/jam = 1,8 km/jam ). Dalam pelayaran lazimnya menggunakan
ukuran kecepatan knot dan dalam penerbangan selain knot juga digunakan ukuran
km/jam atau m/detik.
Angin mempunyai energi yang besarnya setara dengan kecepatannya; makin
kencang makin besar energi yang dibawanya. Berkaitan dengan energi tersebut oleh
Admiral Beaufort dari angkan laut Inggris pada awal abad-19 angin dibedakan
tingkatnya menurut dampak yang ditimbulkan, dan menyusunnya dalam skala yang
selanjutnya dikenal dengan “skala Beaufort”. Kenudian pada tahun 1906 G.C.
Simpson dalam Meteorological Office Publication no. 180, London, mengemukakan
dengan V = kecepatan angin dinyatakan dalam m/dt, dan B besarnya skala. Dengan
skala Beaufort dikenali tanda-tanda sebagai berikut .
Skala Beaufort 0 : Keadaan tenang; asap dari cerobong industri kelihatan
Skala Beaufort 12: Angin sangat kencang yang kecepatannya lebih dari 60 knot. Di
darat banyak menimbulkan pohon tumbang dan di laut menimbulkan gelombang
sangat tinggi.Berdasarkan kecepatannya angin diberi tingkatan yang diberi nama:
a. Angin teduh, adalahangin yang kecepatannya kurang dari 1 knot.
b. Angin ribut, adalah angin yang luar biasa kekuatannya lebih dari 28 knot. c. Angin ribut kuat, adalah angin ribut yang kecepatannya 41 sampai 47 knot. d. Angin ribut hebat, adalah angin ribut yang kecepatannya lebih dari 48 knot. e. Angin ribut lemah, adalah angin ribut yang kecepatannya 25 sampai 33 knot. f. Angin ribut sedang, adalah angin ribut yang kecepatannya 25 sampai 33 knot.
Berbagai nama angin juga diberikan berdasarkan sifat fisis dan berdasarkan teori
atau disebut angin teoritik antara lain.
a. Angin geostrofik adalah angin mendatar yang secara teori dihasilkan dari adanya
keseimbangan antara gaya Corioli dan landaian mendatar tekanan. Dalam fisika
keseimbangan tersebut dinyatakan dengan rumus : Vg = – g/f Әp/Әn; dengan g =
percepatan gravitas bumi, f = faktor Corioli, p = tekanan atmosfer, dan Әp/Әn =
landaian tekanan sepanjang arah garis n tegaklurus isobar. Angin geostrofikk
arahnya Hampir sejajar dengan arah isobar.
b. Angin alobar adalah (1). Komponen angin yang secara teori dihasilkan oleh
ketidak seragaman perubahan lokal dari tekanan mengikut waktu. (2). Kecepatan
angin yang timbul dari adanya keseimbangan antara gaya Corioli dan percepatan
c. Angin isalobar, adalah angin yang secara teori ditimbulkan oleh perubahan
lokal tekanan mengikut waktu.
d. Angin landaian adalah komponen kecepatan angin yang tegaklurus garis
kontur tekanan tetap di suatu titik pada peta ketinggian. Secara teori angin
landaian (Vgr) dihasilkan dari adanya keseimbangan antara gaya Corioli dan gaya
sentripetal dengan landaian mendatar tekanan, dan dinyatakan dengan rumus :
Vgr2/R + f Vgr = – g Әp/Әn; dengan R = jejari lengkungan lintasan, f = faktor
Corioli, g = percepatan gravitas bumi, Әp/Әn = landaian tekanan tegak lurus
isobar.
e. Angin langkisau adalah angin kuat yang mendadak terjadi dalam waktu
singkat yang kemudian diikuti keadaan tenang (ta ada angin); umumnya hanya
disebutkan langkisau saja
f. Angin membujur setara adalah angin khayalan, dalam penerbangan, yang
diwujudkan seperti angin sebenarnya dengan kecepatan seragam sebesar
kecepatan rata-rata pesawat terbang terhadap bumi dan selalu sejajar dengan
lintasannya.
g. Angin pilin adalah badai angin kecil dengan udara di dalamnya berputar
mengelilingi pusat yang bertekanan rendah; kadang-kadang putaran udara
menjulur ke atas sampai beberapa ratus meter dan menimbulkan pilin debu bila
bila terjadi di padang pasir
h. Angin puyuh, adalah putaran kuat turus udara berbentuk juntaian yang
terdapat pada bagian bawah awan Kumulonimbus dan hampir selalu tampak
sebagai awan corong. Pusarnya bergaris tengah beberapa ratus meter. Biasanya
berputar siklonal (mengiri bila dilihat dari atas) dengan kecepatan sekitar 150 –
mempunyai potensi kekuatan sangat merusak. Di Indonesia angin puyuh disebut
juga “puting beliung”.
i. Angin semu, adalah angin yang arah dan kecepatannya diukur dari benda
yang bergerak. Besar arah dan kecepatannya sama dengan beda vektor antara
angin sebenarnya dan kecepatan benda bergerak.
j. Angin sekal setara, adalah sama dengan angn membujur setara
k. Angin termal adalah angin yang secara teori diturunkan dari perbedaan suhu
dan tekanan dalam lapisan atmosfer. Dalam praktik angin termal dinyatakan
sebagai beda vektor angin di suatu paras dan vektor angin paada paras
dibawahnya. Misalkan pada paras 500 mb vektor angin V5 dan pada a.paras 700
mb V7 maka angin termal dalam lapisan antara paras 700 mb dan 500 mb ditulis :
VT = V5 – V7
Di lintang tengah dan tinggi belahan bumi utara, di sekitar daerah dingin, arah
angin termal adalah siklonik (mengiri), dan di sekitar daerah panas antisiklonik
(menganan). Sebaliknya di belahan bumi selatan, di sekitar daerah dingin arah angin
termal adalah antisiklonik (mengiri), dan di sekitar daerah panas siklonik (menganan).
Meskipun penaksiran tersebut hanya untuk lintang tengah dan tinggi, tetapi dapat
digunakan untuk menaksir imbasnya di kawasan tropik atau Indonesia.Dengan angin
termal dapat ditaksir adanya lataan suhu atau energi dan arah penjalarannya. Dalam
lapisan batas (dari permukaan sampai sekitar 3 km atau paras 700 mb) , proyeksi
ujung vektor angin termal membentuk garis spiral yang disebut spiral Ekman. Bila
2.3 ANGIN SEBAGAI PETUNJUK CUACA
Dari angin dapat dikenali bebagai fenomena cuaca. Misalnya, di daerah
mengumpulnya angin di dekat permukaan bumi udara cenderung bergerak ke atas
sehingga menimbulkan banyak awan dan hujan. Sebaliknya di daerah angina
menyebar udara cenderung bergerak ke bawah sehingga di atas daerah tersebut awan
sulit tumbuh. Bila ngin kencang terus-menerus bertiup di atas lautan dapat
menimbulkan gelombang besar. Bila di suatu daerah arah angina sejajar tetapi kearah
samping kecepatannya banyak berbeda menimbulkan gesekan sehingga udara
berputar; demikian pula dapat menimbulkan putaran bila arah angina di suatu sisi
berlawanan arah dengan angina di sisi sebelahan.
Sumber: soerjadi wirjohamidjojo(www.blogger.com/profil)
2.4. KECEPATAN ANGIN DI INDONESIA
Rata-rata secara global kecepatan angin di darat adalah sekitar 30 - 40 km/jam.
akan tetapi kecepatan rata2 angin di daratan sangat tergantung pada dimana kita
mengukur kecepatan angin tersebut dan kapan kita melakukan pengukuran. sebagai
contoh wilayah Indonesia bagian Timur seperti NTT, NTB, Sulsel dan pantai selatan
Jawa mempunyai kecepatan angin rata-rata yang cukup tinggi yaitu 5 m/s, sementara
di indonesia bagian barat cenderung lebih rendah dari nilai tersebut.
Untuk pengukuran kecepatan angin yang lebih baik memang dilakukan pada
ketinggian 10 m, dengan pertimbangan efek dari lapisan perbatas dan korelasi eddy
sudah tidak mempengaruhi kecepatan angin lagi. tapi rata2 stasiun cuaca, terutama di
Indonesia melakukan pengukuran pada 0,5 m hingga 2 m. Sebagian besar stasiun
cuaca bahkan mengambil nilai tengahnya dengan menempatkan anemometer dalam
sangkar cuaca yang berketinggian 1,2 m.
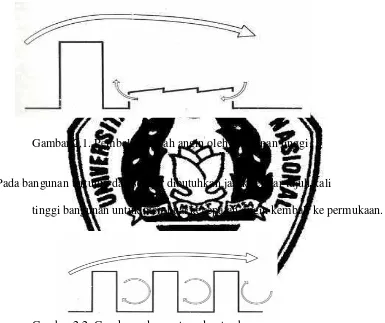
1). Teori gerakan udara
Gerakan udara terjadi akibat pemanasan lapisan udara yang berbeda- beda.
Bangunan tinggi peredaran udara pada bagian atas, sehingga dibelakang bangunan
tinggi terjadi perputaran angin yang berlawaman, sehingga dapat menghasilkan
perputaran udara yang baik bagi bangunan rendah dibelakangnya.
Gambar 2.1. Pembalikan arah angin oleh bangunan tinggi
Pada bangunan tertutup dan sejajar dibutuhkan jarak sekitar tujuh kali
tinggi bangunan untuk membuat kecepatan angin kembali ke permukaan.
Gambar 2.2. Gerakan udara antara deretan bangunan.
2.5 Transistor sebagai sensor kecepatan angin
Peralatan ini menggunakan kenyataan bahwa suatu aliran udara mempunyai
pengaruh mendinginkan terhadap obyek yang lebih hangat di bandingkan dengan
benda-benda di sekelilingnya, maka transistor di kopel secara termal dengan sebuah
transistor (T1) yang di lewati arus secara kontinu. Kecepatan angin di ukur dengan
membandingkan tegangan pada sebuah dioda yang di inginkan pada sebuah dioda
acuan (T3). Tegangan ini masing-masing di berikan ke masukan tak menjungkir dan
menjungkir dari sebuah penguat operasi.
Penguat ini distel ke penguatan 1000, melewatkan arus ke transistor pemanas
ke resistor R1. Jika angin mendingikan dioada, panjaran maju pada dioda tersebut
naik (2mV/derajatC) sehingga menyebabkan tegangan pada masukan tak menjungkir
penguat operasi naik. Sebagai hasilnya tegangan keluaran penguat operasi naik untuk
memberikan arus kerja basis yang lebih banyak untuk T1 sehingga membangkitkan
panas lebih banyak dalam transitor ini. Penguat operasi ini berusaha untuk
mengkompensasi turunnya suhu yang mengarah ke kenaikan dalam hal arus kolektor
T1.
Kepekaan yang tinggi di peroleh dengan membuat suhu T2 lebih tinggi sekitar
5 derajat dari sekelilingnya. Ini dapat di peroleh dengan menstel alat ukur dengan
memberikan offset sekitar 5 mA bila tidak ada angin berhembus. Resistor R1 diplih
denganm sedemikian rupa sehingga arus yang melewati R1 tidak berlebihan.
Dalam rangkaian ini, T1 di perlihatkan sebagai sebuah BC 639, tetapi BC 547
juga dapat di gunakan. Arus kolektor maksimal kemudian harus di batasi ke 100 mA,
jika rangkaian cenderung berosilasi, penguatan IC1 harus dikurangi dengan
Gambar 2.2 bentuk fisik transistor
Gambar 2.3 transistor yang telah dikopel secara termal
2.6 Gambaran Umum Mikrokontroler
Mikrokontroler merupakan suatu IC yang di dalamnya berisi CPU, ROM,
RAM, dan I/O. Dengan adanya CPU tersebut maka mikrokontroler dapat melakukan
proses berfikir berdasarkan program yang telah diberikan kepadanya. Mikrokontroler
banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax, dan
peralatan elektronik lainnya. Mikrokontroler dapat disebut pula sebagai komputer
yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat
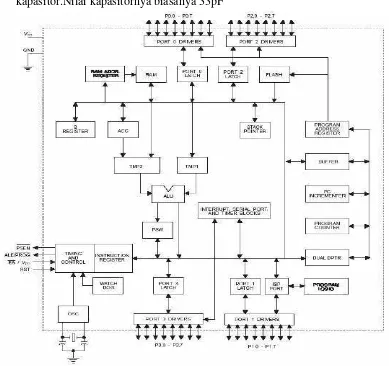
memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat
Gambar 2.4 Susunan mikrokontroler
Pada gambar tersebut tampak suatu mikrokontroler standart yang tersusun
atas komponen-komponen sebagai berikut :
A. Central Processing Unit (CPU)
CPU merupakan bagian utama dalam suatu mikrokontroler. CPU pada
mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU ini
akan membaca program yang tersimpan di dalam ROM dan melaksanakannya.
B. Read Only Memory (ROM)
ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya hanya
dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia mikrokontroler
ROM digunakan untuk menyimpan program bagi mikrokontroler tersebut. Program
tersimpan dalm format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah
C. Random Acces Memory (RAM)
Berbeda dengan ROM, RAM adalah jenis memori selain dapat dibaca juga
dapat ditulis berulang kali. Tentunya dalam pemakaian mikrokontroler ada semacam
data yang bisa berubah pada saat mikrokontroler tersebut bekerja. Perubahan data
tersebut tentunya juga akan tersimpan ke dalam memori. Isi pada RAM akan hilang
jika catu daya listrik hilang.
D. Input / Output (I/O)
Untuk berkomunikasi dengan dunia luar, maka mikrokontroler menggunakan
terminal I/O (port I/O), yang digunakan untuk masukan atau keluaran.
E. Komponen lainnya
Beberapa mikrokontroler memiliki timer/counter, ADC (Analog to Digital
Converter), dan komponen lainnya. Pemilihan komponen tambahan yang sesuai
dengan tugas mikrokontr oler akan sangat membantu perancangan sehingga dapat
mempertahankan ukuran yang kecil. Apabila komponen-komponen tersebut belum
ada pada suatu mikrokontroler, umumnya komponen tersebut masih dapat
ditambahkan pada sistem mikrokontroler melalui port-portnya.
2.7 Mikrokontroler AT89S51
Mikrokontroler AT89S51 adalah mikrokontroler CMOS 8 bit keluaran Atmel
dengan kapasitas Flash memory sebesar 4K bytes. Selain itu AT89S51 juga
mempunyai kapasitas RAM sebesar 128 bytes, 32 saluran I/O, Watchdog timer, dua
pointer data, dua timer/counter 16-bit. Memori Flash digunakan untuk menyimpan
perintah (instruksi) berstandar MCS-51, sehingga memungkinkan mikrokontroler ini
tidak memerlukan external memory (memori luar) untuk menyimpan source code
tersebut.
2.7 Arsitektur Mikrokontroler AT89S51
Mikrokontroler ini mempunyai empat port I/O, akumulator, register, RAM
internal, stack pointer, Arithmetic Logic Unit (ALU), pengunci (latch), dan rangkaian
osilasi yang membuat mikrokontroler ini dapat beroperasi hanya dengan sekeping
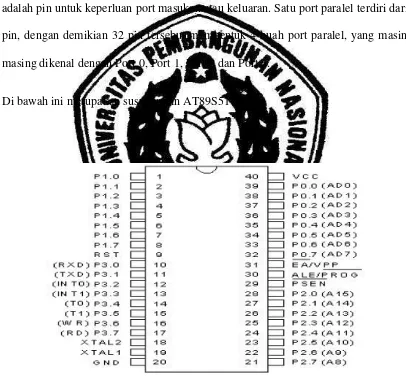
IC. Secara fisik, mikrokontroler AT89S51 mempunyai 40 pin, 32 pin diantaranya
adalah pin untuk keperluan port masukan atau keluaran. Satu port paralel terdiri dari 8
pin, dengan demikian 32 pin tersebut membentuk 4 buah port paralel, yang
masing-masing dikenal dengan Port 0, Port 1, Port 2 dan Port 3.
Di bawah ini merupakan susunan pin AT89S51 :
Berikut penjelasan dari masing-masing pin dan port :
1). Port 0
Port 0 merupakan port I/O 8 bit open drain dua arah. Sebagai sebuah port,
setiap pin dapat mengendalikan 8 input TTL. Ketika logika “1” dituliskan ke
port 0, maka port dapat digunakan sebagai input dengan high impedansi. Port 0
dapat juga dikonfigurasikan untuk multipleksing dengan address/data bus selama
mengakses memori program atau data eksternal.
2). Port 1
Port 1 merupakan port I/0 8 bit dua arah dengan internal pull up. Buffer output
port 1 dapat mengendalikan empat TTL input. Ketika logika “1” dituliskan
ke port 1, maka port ini akan mendapatkan internal pull up dan dapat
digunakan sebagai input. Port 1 juga menerima alamat byte rendah selama
pemrograman dan verifikasi Flash.
Port Pin Fungsi Alternatif :
P1.5 MOSI ( digunakan untuk In System Programming )
P1.6 MISO ( digunakan untuk In System Programming )
P1.7 SCK ( digunakan untuk In System Programming )
3). Port 2
Port 2 merupakan port I/O 8 bit dua arah dengan internal pull up. Buffer
output port 2 dapat mengendalikan empat TTL input. Ketika logika “1”
dituliskan ke port 2, maka port ini akan mendapatkan internal pull up dan dapat
4). Port 3
Port 3 merupakan port I/O 8 bit dua arah dengan internal pull up. Buffer
output port 3 dapat mengendalikan empat TTL input. Ketika logika “1”
dituliskan ke port 3, maka port ini akan mendapatkan internal pull up dan dapat
digunakan sebagai input.
5). Pin 1 sampai 8
Berfungsi sebagai: P1.0_ P1.7. Pin 1 sampai 8 merupakan saluran I/O 8 bit
yang bersifat dua arah, dengan internal pull-up yang dapat digunakan untuk
berbagai keperluan seperti mengendalikan 4 input TTL. Port ini juga
digunakan sebagai saluran alamat saat pemrograman dan verifikasi. Pada pin
6,7,8 terdapat port pin yang digunakan pada saat download program.
6). Pin 9
Berfungsi sebagai : RST. Pin 9 Merupakan masukan reset bagi
mikrokontroler. Reset akan aktif dengan memberikan input high selama 2
cycle.
7). Pin 10 sampai 17
Berfungsi sebagai : P3.0 _ P3.7. Pin 10 sampai 17 merupakan saluran I/O 8
bit dua arah dengan internal pull-up. Di samping sebagai saluran I/O, port ini
memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai maka dapat
digunakan sebagai port paralel 8 bit serbaguna. Selain itu, sebagian Port 3 dapat
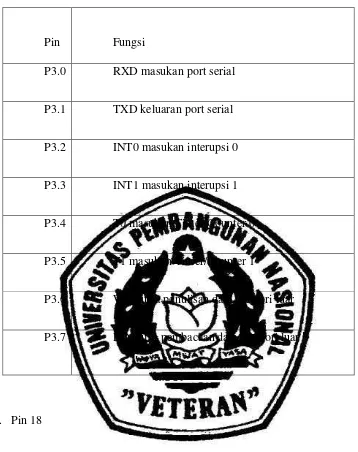
Tabel. 2.1 Fungsi Khusus port 3
Pin Fungsi
P3.0 RXD masukan port serial
P3.1 TXD keluaran port serial
P3.2 INT0 masukan interupsi 0
P3.3 INT1 masukan interupsi 1
P3.4 T0 masukan Timer/Counter 0
P3.5 T1 masukan Timer/Counter 1
P3.6 WR pulsa penulisan data memori luar
P3.7 RD pulsa pembacaan data memori luar
8). Pin 18
Berfungsi sebagai : XTAL2. Pin 18 merupakan keluaran dari rangkaian
osilasi mikrokontroler.
9). Pin 19
Berfungsi sebagai : XTAL1. Pin 19 merupakan masukan untuk rangkaian
10). Pin 20
Berfungsi sebagai : GND. Pin 20 merupakan ground dari sumber tegangan.
11). Pin 21 sampai 28
Berfungsi sebagai : P2.0_P2.7. Pin 21 sampai 28 merupakan saluran I/O 8 bit
dua arah dengan internal pull-up.Saat pengambilan data dari program memori
eksternal atau selama pengaksesan data memori eksternal yang menggunakan
alamat 16 bit. Port 2 berfungsi sebagai saluran alamat tinggi (A8–A15).
Akan tetapi, saat mengakses data memori eksternal yang menggunakan alamat
8 bit, Port 2 mengeluarkan isi P2 pada Special Function Register.
12). Pin 29
Berfungsi sebagai : PSEN. Pin ini berfungsi pada saat mengeksekusi program
yang terletak pada memori eksternal. Program Strobe Enable (PSEN) akan
aktif dua kali setiap cycle.
13). Pin 30
Berfungsi sebagai : ALE/PROG. Pin ini dapat berfungsi sebagai Address
Latch Enable (ALE) yang menahan low bytes address pada saat
mengakses memori eksternal. Sedangkan pada saat Flash Programming
(PROG) berfungsi sebagai pulsa input selama proses pemrograman.
14). Pin 31
Berfungsi sebagai : EA/VPP. Pada kondisi low, pin ini akan berfungsi sebagai
External Access Enable (EA) yaitu mikrokontroler akan menjalankan program
untuk menjalankan program yang ada pada memori internal. Pin ini juga
berfungsi sebagai masukan tegangan selama proses pemrograman.
15). Pin 32 sampai 39
Berfungsi sebagai : D7_ D0 (A7 _A0). Pin 32 sampai 39 ialah Port 0 yang
merupakan saluran I/O 8 bit open collector dan dapat juga digunakan sebagai
multipleks bus alamat rendah dan bus data selama adanya akses ke memori
program eksternal. Saat proses pemrograman dan verifikasi, Port 0 digunakan
sebagai saluran data.
16). Pin 40
Berfungsi sebagai : VCC. Pin 40 merupakan masukan sumber tegangan positif
bagi mikrokontroler.
2.2.2 Memori Internal AT89S51 Memori internal AT89S51 terdiri dari 3 bagian yaitu
ROM, RAM dan SFR.
1. Read Only Memory (ROM)
ROM adalah memori tempat menyimpan program/source code. Sifat ROM
adalah non-volatile yaitu data/program tidak akan hilang walaupun tegangan supply
tidak ada. Kapasitas ROM tergantung dari tipe mikrokontroler.Untuk AT89S51
kapasitas ROM adalah 4 KByte. ROM pada AT89S51 menempati address 0000 s/d
2. Random Access Memory (RAM)
RAM adalah memori tempat menyimpan data sementara. Sifat RAM
adalah volatile yaitu data akan hilang jika tegangan supply tidak ada. Kapasitas
RAM tergantung pada tipe mikrokontroler.
Pada AT89S51 RAM dibagi menjadi 2 yaitu :
A. LOWER 128 byte yang menempati address 00 s/d 7F.
RAM ini dapat diakses dengan pengalamatan langsung (direct) maupun tak
langsung (indirect).
B. UPPER 128 byte yang menempati address 80 s/d FF.
Address ini sama dengan address SFR meski secara fisik benar–benar berbeda.
RAM ini hanya dapat diakses dengan pengalamatan tak langsung saja.
C. Special Function Register (SFR)
SFR adalah register dengan fungsi tertentu. Misalnya, register TMOD dan
TCON adalah timer control register yang berfungsi mengatur fasilitas timer
2.2.3 Osilator dan Clock
Agar dapat meneksekusi program, mikrokontroler membutuhkan pulsa
clock. Pulsa ini dapat dihasilkan dengan memasang rangkaian resonator pada
pin XTAL1 dan XTAL2. Frekuensi kerja maksimum AT89S51 adalah 33
MHz. Rangkaian osilator yang bisa digunakan pada mikrokontroler.
Komponen utamanya adalah quartz crystal yang dihubungkan dengan
kapasitor.Nilai kapasitornya biasanya 33pF
2.2.4 Bahasa Assembly Mikrokontroler AT89S51
Secara fisik, mikrokontroler bekerja dengan membaca instruksi yang
tersimpan di dalam memori. Mikrokontroler menentukan alamat dari memori
program yang akan dibaca dan melakukan proses baca data di memori. Data yang
dibaca diinterprestasikan sebagai instruksi. Alamat instruksi disimpan oleh
mikrokontroler di register, yang dikenal sebagai program counter.Instruksi ini
misalnya program aritmatika yang melibatkan 2 register.
Mikrokontroler AT89S51 memiliki sekumpulan instruksi yang sangat lengkap.
Instruksi MOV untuk byte dan bit dikelompokkan sesuai dengan mode pengalamatan
(addressing modes). Mode pengalamatan menjelaskan bagaimana operand
dioperasikan. Label mnemonic operand 1 operand 2 komentar (isi memori) (opcode)
4000 7430 MOV A, #35H ;copy 35H ke akumulator A Isi memori ialah bilangan
heksadesimal yang dikenal oleh mikrokontroler yang merupakan representasi dari
bahasa assembly yang telah dibuat. Mnemonic atau opcode ialah kode yang akan
melakukan aksi terhadap operand. Operand ialah data yang diproses oleh opcode.
Sebuah opcode bisa membutuhkan 1, 2 atau lebih operand, kadang juga tidak perlu
operand. Sedangkan komentar dapat menggunakan tanda titik koma (;).
2.2.5 Instruksi Mikrokontroler AT89S51
Instruksi pada mikrokontroler digunakan untuk menjalankan program sesuai
dengan perintah yang diinginkan. Di bawah ini merupakan instruksi yang dapat
1). ACALL (Absolute Call)
Instruksi ACALL digunakan untuk memanggil sub rutin program
Contoh :
START:
ACALL TUNDA ; Panggil Procedure penundaan waktu ….
TUNDA:
; Label Tunda
MOV R7,#0FFH ; Isikan Register 7 dengan data 0FFH(255)
2). ADD (Add Immediate Data)
Instruksi ini akan menambah 8 bit data langsung ke dalam isi akumulator dan
menyimpan hasilnya pada akumulator.
Contoh : Add A, #data
Add A, #@R1 ; Add indirect address
Add A, R6 ; Add register
Add A, 30H ; Add memori
3). CJNE (Compare Indirect Address to Immediate Data)
Instruksi ini akan membandingkan data langsung dengan lokasi memori yang
dialamati oleh register R atau Akumulator A. Apabila tidak sama maka instruksi
Format : CJNE R,#data,Alamat kode
Instruksi CLR akan mereset data akumulator menjadi 00H.
Format : CLR A
5). DEC (Decrement Indirect Address)
Instruksi DEC akan mengurangi isi lokasi memori yang ditujukan oleh
register R dengan 1 dan hasilnya disimpan pada lokasi tersebut.
Contoh: DEC 40H
DEC R7 ; decrement register
6). DJNZ
(Decrement Register And Jump If Not Zero) Instruksi DJNZ akan mengurangi nilai
register dengan 1 dan jika hasilnya sudah 0 maka instruksi selanjutnya akan
dieksekusi. Jika belum 0 akan menuju ke alamat kode.
Format : DJNZ Rr,Alamat Kode
Instruksi INC akan menambahkan isi memori dengan 1 dan menyimpannya pada
alamat tersebut.
Contoh: INC A
INC R7 ; increment register
8). JMP (Jump to sum of Accumulator and Data Pointer)
Instruksi JMP untuk memerintahkan loncat kesuatu alamat kode tertentu.
Format : JMP alamat kode.
Contoh :
Loop: …
RL A ; Geser data Akumulator ke kiri
ACALL Long_Delay ; Panggil Procedure penundaan waktu
JMP Loop ; Loncat ke Procedure Loop
9). MOV
Instruksi ini untuk memindahkan isi akumulator/register atau data dari nilai luar
atau alamat lain.
Contoh :
MOV A,#40H
MOV @RO,A
MOV DPTR, #20H
MOVC A, @A+DPTR ; pindahkan kode memori offset dari data pointer ke A
MOVX @DPTR, A ; Pindahkan akumulator ke memori eksternal yang dialamati
; oleh data pointer
10). RET (Return from subroutine)
Instruksi untuk kembali dari suatu subrutin program ke alamat terakhir subrutin
tersebut di panggil.
11). SETB (Set Bit)
Instruksi SETB untuk mengaktikan atau memberikan logika 1 pada sebuah
bit data.
Format :
SETB A.1 (memberikan logika 1 pada accumulator bit ke 1)
SETB P1.1 (memberikan logika 1 pada Port 1 bit ke 1)
12). CLRB (Clear Bit)
Instruksi CLRB untuk memberikan logika 0 pada sebuat bit data.
Format :
CLRB A.1 ; memberikan logika 0 pada accumulator bit ke 1
2.4 Liquid Crystal Display (LCD)
LCD merupakan salah satu komponen penting dalam pembuatan tugas akhir
ini karena LCD dapat menampilkan perintah-perintah yang harus dijalankan oleh
pemakai.LCD mempunyai kemampuan untuk menampilkan tidak hanya angka,
huruf abjad, kata-kata tapi juga simbol-simbol.
Jenis dan ukuran LCD bermacam-macam, antara lain 2x16, 2x20, 2x40, dan
lain-lain. LCD mempunyai dua bagian penting yaitu backlight yang berguna jika
digunakan pada malam hari dan contrast yang berfungsi untuk mempertajam tampilan
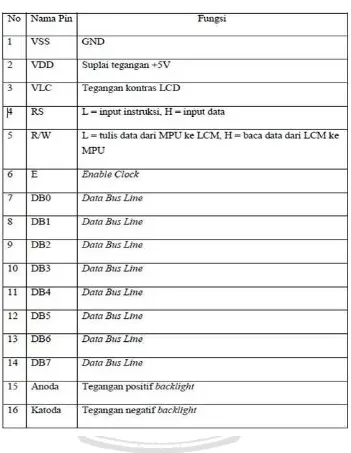
Tabel 2.2 Fungsi pin LCD
Fungsi dari masing– masing pin pada LCD adalah pin pertama dan kedua
merupakan pin untuk tegangan suplai sebesar 5 volt, untuk pin ketiga harus
ditambahkan resistor variabel 4K7 atau 5K ke pin ini sebagai pengatur kontras
tampilan yang diinginkan.
Pin keempat berfungsi untuk memasukkan input command atau input data, jika ingin
memasukkan input command maka pin 4 diberikan logic low (0), dan jika ingin
Fungsi pin kelima untuk read atau write, jika diinginkan untuk membaca karakter data
atau status informasi dari register (read) maka harus diberi masukan high (1), begitu
pula sebaliknya untuk menuliskan karakter data (write) maka harus diberi masukan
low (0). Pada pin ini dapat dihubungkan ke ground bila tidak diinginkan
pembacaan dari LCD dan hanya dapat digunakan untuk mentransfer data ke LCD.
Pin keenam berfungsi sebagai enable, yaitu sebagai pengatur transfer command atau
karakter data ke dalam LCD. Untuk menulis ke dalam LCD data ditransfer waktu
terjadi perubahan dari high ke low, untuk membaca dari LCD dapat dilakukan
ketika terjadi transisi perubahan dari low ke high.
Pin-pin dari nomor 7 sampai 14 merupakan data 8 bit yang dapat ditransfer dalam 2
bentuk yaitu 1 kali 8 bit atau 2 kali 4 bit, pin ini akan langsung terhubung ke
pin-pin mikrokontroler sebagai input/output. Untuk pin-pin nomor 15-16 berfungsi sebagai
backlight.
2.7 KAPASITOR (KONDENSATOR)
Kapasitor (Kondensator) yang dalam rangkaian elektronika dilambangkan
dengan huruf "C" adalah suatu komponen elektronika yang dapat menyimpan
energi/muatan listrik di dalam medan magnet listrik, dengan cara mengumpulkan
ketidakseimbangan internal dari muatan listrik.
Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu
bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum,
keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka
muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya
satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan
sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah
oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini tersimpan selama tidak
ada konduksi pada ujung-ujung kakinya.
a) Kondensator elektrolit
Kondensator elektrolit atau Electrolytic Condenser (sering disingkat Elco)
adalah kondensator yang biasanya berbentuk tabung, mempunyai dua kutub kaki
berpolaritas positif dan negatif, ditandai oleh kaki yang panjang positif sedangkan
yang pendek negatif atau yang dekat tanda minus ( - ) adalah kaki negatif. Nilai
kapasitasnya dari 0,47 µF (mikroFarad) sampai ribuan mikroFarad dengan voltase
kerja dari beberapa volt hingga ribuan volt.
Gambar 2.8 Bentuk fisik dari kondensator elektrolit
b) Kondensator Keramik (Ceramic Capacitor)
Bentuknya ada yang bulat tipis, ada yang persegi empat berwarna merah,
hijau, coklat dan lain-lain. Dalam pemasangan di papan rangkaian (PCB), boleh
dibolak-balik karena tidak mempunyai kaki positif dan negatif. Mempunyai
(KpF). Dengan tegangan kerja maksimal 25 volt sampai 100 volt, tetapi ada juga
yang sampai ribuan volt.
Gambar 2.9 Bentuk fisik dari kondensator keramik
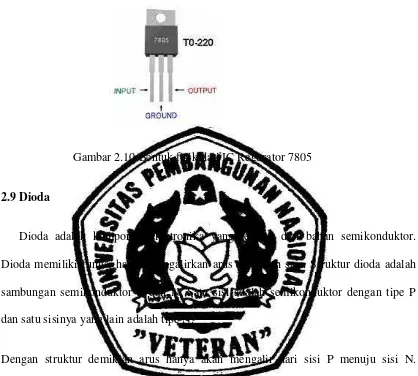
2.8IC Regurator 7805
adalah sebuah keluarga sirkuit terpadu regulator tegangan linier monolitik
bernilai tetap. Keluarga 78xx adalah pilihan utama bagi banyak sirkuit elektronika
yang memerlukan catu daya teregulasi karena mudah digunakan dan harganya relatif
murah. Untuk spesifikasi IC individual, xx digantikan dengan angka dua digit yang
mengindikasikan tegangan keluaran yang didesain, contohnya 7805 mempunyai
keluaran 5 volt dan 7812 memberikan 12 volt. Keluarga 78xx adalah regulator
tegangan positif, yaitu regulator yang didesain untuk memberikan tegangan keluaran
yang relatif positif terhadap ground bersama. Keluarga 79xx adalah peranti
komplementer yang didesain untuk catu negatif. IC 78xx dan 79xx dapat digunakan
bersamaan untuk memberikan regulasi tegangan terhadap pencatu daya split.
IC 78xx mempunyai tiga terminal dan sering ditemui dengan kemasan TO220,
walaupun begitu, kemasan pasang-permukaan D2PAK dan kemasan logam TO3 juga
tegangan keluaran hingga kira-kira 36 volt, dan biasanya mempu pemberi arus listrik
hingga 1.5 Ampere (kemasan yang lebih kecil atau lebih besar mungkin memberikan
arus yang lebih kecil atau lebih besar).
Gambar 2.10 Bentuk fisik dari IC Regurator 7805
2.9 Dioda
Dioda adalah komponen elektronika yang terbuat dari bahan semikonduktor.
Dioda memiliki fungsi hanya mengalirkan arus satu arah saja. Struktur dioda adalah
sambungan semikonduktor P dan N. Satu sisi adalah semikonduktor dengan tipe P
dan satu sisinya yang lain adalah tipe N.
Dengan struktur demikian arus hanya akan mengalir dari sisi P menuju sisi N.
Dibawah ini gambar simbol dan struktur dioda serta bentuk karakteristik dioda.
2.10 Transistor
Transistor adalah semikonduktor yang memiliki peranan yang sangat penting
dalam dunia elektronik analog ataupun digital. Komponen ini mempunyi banyak
fungsi dalam dunia elektronik, diantaranya sebagai penguat, switching (saklar),
modulasi signal, stabilitas tegangan dll.
Transistor memiliki tiga kaki yang memiliki fungsi dan nama berbeda, yaitu Basis
(B), Emitor (E), dan Colector (C) Fungsi utama atau tujuan utama pembuatan
transistor adalah sebagai penguat (amplifier), namun dikarenakan sifatnya, transistor
ini dapat digunakan dalam keperluan lain misalnya sebagai suatu saklar elektronis.
Susunan fisik transistor adalah merupakan gandengan dari bahan semikonduktor tipe
P dan N seperti digambarkan dibawah ini.
Gambar 2.12 Transistor
2.11 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi
jumlah arus yang mengalir dalam suatu rangkaian. Kemampuan resistor dalam
menghambat arus listrik sangat beragam disesuaikan dengan nilai resistansi resistor
Bentuk resistor yang umum adalah seperti tabung dengan dua kaki di kiri dan kanan.
Pada badannya terdapat lingkaran membentuk cincin kode warna untuk mengetahui
besar resistansi tanpa mengukur besarnya dengan Ohmmeter.
Gambar 2.13 Resistor
2.12 Buzzer
Buzzer atau sering disebut pengeras suara adalah komponen elektronika yang
mampu mengubah sinyal listrik menjadi sinyal suara. Proses mengubah sinyal
ini dilakukan dengan cara menggerakkan komponennya yang berbentuk selaput.
BAB III
DESAIN DAN PERANCANGAN
Pada BAB III ini akan dibahas perancangan sistem baik pada perangkat
keras (hardware) dan perangkat lunak (software) perangkat keras meliputi :
1) Sistem Minimum.
2) Rangkaian Buzzer dan Sensor.
3) Display LCD
4) Kabel penghubung
5). Minimum Sistem AT89S51
3.3 Perancangan Perangkat Elektronika.
Diagram blok di bawah ini merupakan gambaran secara besar dari jalanya
sistem yang dibuat dalam tugas akhir ini.
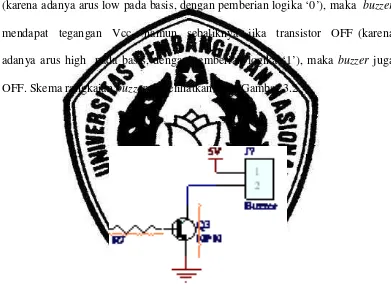
3.4 Rangkaian Buzzer
Pada alat ini buzzer berfungsi untuk indikator bunyi atau penanda
apabila daya atau kecepatan angin mencapai daya maksimal. mikrokontroler,
rangkaian buzzer menggunakan transistor A733 (general purpose), pada
dasarnya, buzzer di hubungkan ke tegangan Vcc 5 Volt (dengan batasan arus oleh
resistor 1K ohm), karena adanya transistor, maka buzzer mendapatkan arus atau
tidaknya tergantung dari kondisi transistor saat itu, jika transistor ON
(karena adanya arus low pada basis, dengan pemberian logika ‘0’), maka buzzer
mendapat tegangan Vcc, namun sebaliknya jika transistor OFF (karena
adanya arus high pada basis, dengan pemberian logika ‘1’), maka buzzer juga
OFF. Skema rangkaian buzzer di pelihatkan pada Gambar 3.2
1). Sensor (Transistor)
Rangkaian sensor Penguat ini distel ke penguatan 1000, melewatkan arus ke
transistor pemanas ke resistor R1. Jika angin mendingikan dioda, panjaran maju
pada dioda tersebut naik (2mV/derajatC) sehingga menyebabkan tegangan pada
masukan tak menjungkir penguat operasi naik.Sebagai hasilnya tegangan keluaran
penguat operasi naik untuk memberikan arus kerja basis yang lebih banyak untuk
T1 sehingga membangkitkan panas lebih banyak dalam transitor ini. Penguat
operasi ini berusaha untuk mengkompensasi turunnya suhu yang mengarah ke
kenaikan dalam hal arus kolektor T1.
2). Display LCD
Perangkat ini digunakan sebagai output atau penampil dari hasil yang
sudah diproses pada mikrokontroler.
3). Kabel penghubung
Perangkat ini berfungsi untuk menyambung sensor dengan LCD yang
nantinya sensor memberikan informasi ke LCD melalui kabel data yang di
pasang.
3.1.2 Software
1). Proteus 7 Profesional
Proteus sebagai program yang digunakan untuk merancang rangkaian
elektronik
2). Program compiler ASM51 dan program downloader AEC ISP ASM51
adalah program compiler berbasis windows untuk mikrokontroler keluarga
ATMEL. Pemrograman pada mikrokontroler AT89S51 menggunakan bahasa
adalah untuk me-load file berekstensi “.asm”yang sudah dibuat dengan
menggunakan Notepad untuk dirubah menjadi file berektensi “.hex”. Setelah
file dirubah menjadi “.hex” kemudian di-load dengan menggunakan program
compiler AEC ISP. Tujuannya adalah untuk memasukkan program mikro ke
dalam downloader mikrokontroler AT89S51.
3.3 Rancangan Skematik
Perancangan papan rangkaian menggunakan software Proteus 7
Profesional.Langkah pertama adalah menggambar skema rangkaian
pada\schematic editor. Kemudian dari schematic editor komponen yang dirangkai
dipindahkan ke layout PCB.
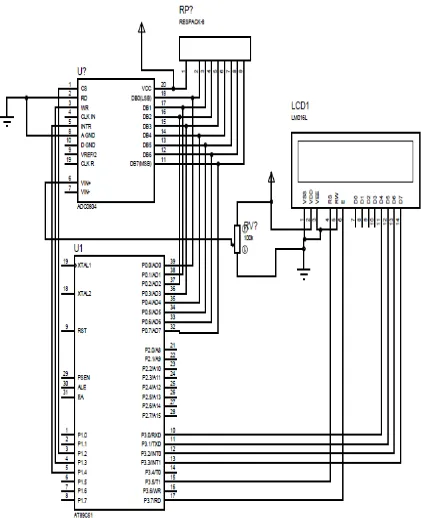
3.2.2 Rangkaian Sistem Minimum AT89S51.
Digunakan untuk menyimpan berapa kecepatan angin yang telah di ukur,
memeriksa kode kunci yang dimasukkan, dan mengatur tampilan pada LCD,
Selain itu, tugas mikrokontroler lainnya adalah men-drive indikator output berupa
LED dan buzzer. Berikut adalah gambar rangkaian mikrokontroller yang
3.4 Tahap Penyelesaian
Setelah selesai melakukan perancangan alat-alat, langkah selanjutnya
adalah perakitan. Tahap perakitan dimulai dengan urutan sebagai berikut :
1). Merangkai komponen elektronik
Komponen elektronik, minimum sistem AT89S51, transistor, LCD
dan buzzer,dirangkai sesuai dengan perancangan yang telah dibuat.
Komponen dipasang pada tempatnya sesuai dengan layout PCB.
2). Memasang PCB ke dalam box
PCB yang sudah dipasangi komponen elektronik dan komponen
mikrokontroler dipasang ke dalam box agar lebih rapi dan teratur.
3). Pemrograman mikrokontroler AT89S51
Pemrograman dilakukan setelah semua komponen elektronika dan
komponen mikrokontroler terpasang dengan benar. Pemrograman dilakukan
dengan menggunakan bahasa Assembler. Listin program ditulis dengan
menggunakan program Notepad dan file disimpan dengan ekstensi “.asm”.
Kemudian file “.asm” tersebut di-load dengan program compiler ASM51
untuk dirubah menjadi file “.hex”. Setelah file dirubah menjadi file “.hex”
kemudian di-load dengan menggunakan program compiler EC ISP.
Tujuannya adalah untuk memasukkan program mikro ke dalam
downloader mikrokontroler AT89S51.
Untuk proses pemrograman keIC AT89S51 ditunjukkan seperti di
bawah ini :
a. Program ditulis dengan menggunakan Notepad kemudian untuk merubah
b. Dibuka program compiler ASM51 untuk merubah file rico.asm menjadi
rico.hex.
c. Dibuka program downloader AEC ISP
Kemudian memilih pada bagian A lalu memasukkan nama program yang akan
didownload. Nama filenya adalah rico.hex. Proses akan berlanjut dengan
inisialisasi memori program seperti terlihat pada gambar di bawah ini :
d. Proses selanjutnya adalah mendownload program ke IC AT89S51 dengan
memilih pada bagian E.
4). Finishing
Setelah semuanya terpasang dengan baik,maka tahap selanjutnya adalah
tahap finishing dengan merapikan kabel-kabel dan merapikan box.
5). Ujicoba
Setelah terpasang menjadi sebuah prototipe sensor pendeteksi jarak
pada mobil dengan baik,maka dilakukan ujicoba. Ujicoba dilakukan dengan
melakukan tes untuk mengukur jarak yang telah ditentukan. Jarak yang
3.5 Sistem Alur kerja mikrokontroller
IMPLEMENTASI SISTEM
Ada beberapa hal yang harus diperhatikan sebelum program pengukur kecepatan
angin dibuat dan pada akhirnya dapat dijalankan dengan baik, cara mengimplementasikan
program yang sudah dibuat.
4.1 Kebutuhan Perangkat Sistem
Pada bagian ini akan dijelaskan mengenai perangkat keras dan perangkat lunak
yang digunakan pada implementasi sistem ini. Perangkat keras yang digunakan adalah
sebagai berikut:
1) Personal komputer untuk desain skema rangkaian, pembuatan software, dan proses
programming ke PEROM AT89S51.
2) Peralatan (downloader, kabel serial DB9)
Transistor C945P331
Sedangkan perangkat lunak yang digunakan dalam perancangan aplikasi ini adalah
sebagai berikut :
1) Proteus 7 Profesional
2) ISP Flash programmer version 3.0a
3) MIDE-51
4.2 Implementasi Minimum AT89S51
Implementasi minimum AT89S51 dibuat untuk proses utama untuk menjalankan
suatu sistem kerja yang kita inginkan. Mikrokontroler AT89S51 sebuah media
penyimpanan program yang kita dibuat. Implementasi mikrokontroler AT89S51 tersebut
4.2.1 Rangkaian Minimum AT89S51
Pada rangkaian minimum AT89S51 adalah rangkaian utama pada sistem
mikrokontroler AT89S51. Didalam mikrokontroelr AT89S51 ada sebuah program untuk
menjalankan subuah sistem yang mau dijalankan. Gambar rangkaian minimum AT89S51
dapat dilihat pada Gambar 4.1
Setelah merangkai komponen-komponen pada PCB, tahap implementasi yang terakhir
adalah menggabungkan rangkaian PCB dengan adaptor dan kontak, kabel pararel,
Berikut ini adalah gambar keseruruhan rangkaian alat, Gambar 4.2 (a) LCD,(b) Kontak, (c)
Rangkaian mikrokontroller.
Gambar 4.2 Rangkaian alat keseluruhan
4.3 Prosedur Pemasangan Program Pada Mikrokontroller AT89S51
Agar listing program yang dibaca Mikrokontroller, maka listing program yang
awalnya berekstensi .ASM harus diconvert menjadi .hex. Untuk memasang program pada
Chip AT89S51 Pertama-tama program yang sudah dibuat sebelumnya harus dicompile
terlebih dahulu, untuk memastikan tidak ada error, karena jika ada yang error maka
program tidak akan bisa dibuat. A
4.3.1 Download Program Ke dalam Mikrokontroler
Untuk proses donwload program ke dalam IC mikrokontroler software yang
digunakan ISP-Flash programmer Version 3.0a. Pada proses pembuatan program, program
diketik dalam bahasa assembler. Kemudian di compile dalam dengan compiler asm51,
menjadi file object. Deri object di compile menjadi file dalam bentuk hex. Untuk menulis
program dalam bahasa asember kita bisa memanfaatkan teks editor, seperti notepad, editor
dos, dsb. Setelah kita menulis program dalam teks editor, kita perlu simpan file kita dengan
ekstensi .asm, kemudian kita simpan pada folder dengan lokasi yang sama dengan lokasi
copiler ASM51.
Langkah-Langkah Download:
Tampilan MIDE-51
Tuliskan Program dalam page M-IDE studio MCS-51 dalam bahasa Assembly (ASM51
assembler) Simpan Program misal di D:/Program_mikro, kemudihan lakukan Proses Build
current file seperti tampak pada Gambar 4.4. Apabila tidak terjadi error maka pada
tampilan bawah akan muncul pesan seperti yang ditunjukan dalam Gambar 4.5.
Gambar 4.4 Proses Build current file
setelah proses build sukses selanjutnya buka software ISP Flash Programmer V3.0a
sebagai catatan software ISP Flash Programmer V3.0a tidak memerlukan proses instalasi
sehingga akan lebih mudah dan praktis digunakan.
Gambar 4.6 Tampilan software ISP Flash Programmer V3.0a
Seperti tampak pada jendela software ISP-Programmer Versi 3.0a terdapat beberapa
tombol, antara lain tombol Read, Write, Open file, Save file, Disp Buffer, Verifty,
Write LBs, Signature, Reload File, dan About. Selain itu juga ditampilkan bagian yang
digunakan untuk memilih jenis IC mikrokontroller yang akan di gunakan.
Dalam jendela tersebut ditunjukan bahwa hanya beberapa IC mikrokontroller yang proses
donwload programnya adalah seperti yang terdapat dalam tabel berikut.
Tabel 4.8 Mikrokontroller yang kompatibel untuk
software ISP-Programmer Versi 3.0a
Langkah selanjutnya adalah koneksikan atau hubungan antara project board
mikrokontroller (downloader) dengan komputer (PC atau laptop) setelah koneksi dilakukan
dengan benar, maka dilakukan uji koneksi. Apakah komputer mengenali adanya hardware
mikrokontroller yang telah dihubungkan ke komputer dengan kabel data, klik tombol
Sebelum mulai mencari file *.hex yang akan di-download, pastikan komputer mendeteksi
mikrokontroller yang akan diisi dengan program. Setelah itu klik tombol Open file
kemudian akan muncul jendela Open Hex File pilih file *.hex yang akan kita donwload,
lalu klik jendela Open Hex File tersebut.
Gambar 4.9 Open File
Langkah berikutnya adalah menuliskan (write) atau men-download data hesadesimal dari
komputer menuju IC mikrokontroller. Caranya adalah dengan meng-klik tombol Write
hingga muncul jendela Programming the uController seperti tampak pada gambar dibawah
Gambar 4.10 klik tombol Write
Gambar 4.9 Programming the uController
Setelah proses loading program ke mikrokontroller selesai akan muncul jendela Write yang
di dalamnya tertulis “Programing/Verify OK”. Jendela itu menunjukan bahwa proses
download program ke mikrokontroller telah selesai dan berhasil.
HASIL DAN PEMBAHASAN
Pengujian alat dilakukan untuk mengetahui apakah fungsi – fungsi yang telah
direncanakan bekerja dengan baik atau tidak. Pengujian alat juga berguna untuk
mengetahui tingkat kinerja dari fungsi tersebut. Setelah dilakukan pengujian, maka
hendaknya melakukan ujian ukuran / analisa dan terhadap apa yang diuji untuk
mengetahui keberhasilan dari alat yang di buat.
Pengujian ini meliputi :
Pengujian hardware dilakukan untuk mengetahui bagaimana kinerja hardware
yang telah dibuat, pengujian ini meliputi :
5.1.1. Rangkaian Sensor angin (transistor)
Peralatan ini menggunakan kenyataan bahwa suatu aliran udara
mempunyai pengaruh mendinginkan terhadap obyek yang lebih hangat di
bandingkan dengan benda-benda di sekelilingnya, maka transistor di kopel
secara termal dengan sebuah transisitor (T1) yang di lewati arus secara
kontinu. Kecepatan angin di ukur dengan membandingkan tegangan pada
5.1.1.1. Pengujian kalibrasi kecepatan angin
a. Peralatan yang dibutuhkan
Menggunakan kipas angin berkuran sedang, digunakan kipas
angin dengan ukuran sedang ini agar angin yang di pancarkan bisa
stabil dan akurasi hasil pengukuran sesuai dengan yang di terapkan.
b. Membutuhkan alat ukur seperti anomemeter atau alat ukur
putaran roda sepeda motor (speedometer) sebagai pembanding,
dengan tujuan untuk menyamai kalibrasi kecepatan angin.
Cara pengujian.
1) Kipas angin diarahkan ke sensor pada jarak yang berbeda-beda
namun dengan ketentuan jarak 10-20 cm.
2) Mengukur kecepatan yang dipancarkan oleh kipas angin.
Tabel 5.2 Data Pengujian Sensor angin
40 16,9 km/jam 16 km/jam Bahaya
50 15,2 km/jam 15 km/jam Bahaya
5.2 Pengujian keseluruhan alat.
Pada tahap ini pengujian dilakukan untuk mengetahui apakah sistem yang di
buat telah berjalan atau tidak. Langkah yang dilakukan pada pengujian ini adalah:
a. Memastikan bahwa semua komponen, kabel dan alat telah terpasang dengan
benar.
b. Menyalakan alat, apakah sudah siap untuk di ujicoba.
c. Menstabilkan sensor angin terlebih dahulu, agar dalam proses pengukuran
dapat diperoleh akurasi data yang diinginkan.
d. Lampu LED biru dan merah akan menyala bersamaan dengan kondisi alat
sedang ON, dan kecepatan angin pada kecepatan 00,1 atau 00,2 km/jam.
e. Lampu LED biru akan terus menyala bersamaan dengan bunyi buzzer disaat
kecepatan angin mendekati level “HATI-HATI, BAHAYA dan SANGAT
Gambar 5.1 lampu LED menyala bersamaan.
Adapun bentuk fisik mekanik dari perangkat ini adalah sebagai berikut:
Gambar 5.3 Bentuk Fisik Perangkat Mekanik saat kondisi sedang ON.
Gambar 5.4 bentuk fisik LCD pada saat kondisi awal.
Pada tampilan LCD pada gambar diatas adalah dimana kondisi angin
menunjukkan kecepatan 00,2 km/jam, dan itu merupakan kondisi dimana kecepatan
angin yang diperoleh adalah didalam ruangan. Karena setiap ruangan pasti terdapat
BAB VI
PENUTUP
Dari pengujian alat pada tugas akhir ini, dapat ditarik kesimpulan dan
saran yang nantinya dapat berguna untuk pengembangan alat ini secara lebih
baik lagi.
6.1 Kesimpulan
Berdasarkan uraian dan analisa yang telah dikemukakan pada bab
sebelumnya, maka dapat disimpulkan bahwa :
a. Cara kerja dari alat “pengukur kecepatan angin pada gedung” ini yaitu
untuk mengukur berapa besar kecepatan angin pada gedung yang
nantinya mungkin sangat berguna untuk diketahui, pada pengujian
prototype ini angin yang mencapai level sangat bahaya adalah dengan
keterangan 15,1 - 15,2 km/jam. Namun jika kecepatan angin pada level
yang sesungguhnya adalah mencapai 151-152 km/jam.
b. Alat ini akan membutuhkan kipas angin yang mempunyai kekuatan angin
yang fokus, karena angin yang ada di sekitar akan sangat mempengaruhi
daya kipas angin yang digunakan sebagai tes uji, untuk itu data yang
akurat diharapkan dapat diperoleh dari hasil ujicoba alat.
c. Kalibrasi yang digunakan adalah speedometer atau pengukur putaran roda
6.2 Saran
Dari hasil pembahasan, maka saran yang dapat disampaikan adalah
sebagai berikut :
a. Alat ini mungkin lebih baik di beri banyak buzzer atau LED yang bisa
menjadi tanda apabila angin mencapai level yang tinggi.
b. Sebaiknya alat ini dapat dikembangkan lagi dengan menggunakan
pengukuran dengan skala besar dan lebih berguna nantinya.
c. Kalibrasi yang digunakan harus lebih akkurat agar hasil pembanding
• Arsyad, Sofyan, Ilmu Iklim dan Pengairan, CV Yasagama, Jakarta, 1983.
• Barry Gwoollard, Elektronika Praktis Cetakan Kedua, PT. Praditya Paramita,
Jakarta, 1998.
• Ibnu Malik, Muhammad, Anistardi, Bereksperimen dengan Mikrokontroller
8031, Elex Media Komputindo,
• Jakarta, 1997. Malvino Leach, Prinsip-Prinsip dan Penerapan digital Edisi
ketiga, Erlangga, Jakarta, 1992.
• Malvino, Paul Albert, Prinsip – Prinsip Elektronika Jilid
• I, Diterjemahkan oleh Sahat Pakpahan, Erlangga, Jakarta, 1996.
• Millman, Halkias, Elektronika Terpadu, Erlangga , Jakarta, 1993.
• Roger L. Tokheim, Sutisna, Prinsip-Prinsip Digital Edisi
• Kedua, Erlangga, 1994. Putra, Agfianto Eko, Belajar Mikrokontroler
• Kumpulan Artikel - 103 - Energi Angin / Wind Turbine / Wind Mill
• Lippsmeier , Georg , “ Bangunan Tropis “ PT Gelora Aksara Pertama , Cetakan Pertama , 1994