BAB II
LANDASAN TEORI
Pengukuran adalah serangkaian proses yang dilakukan untuk mendapatkan sebuah data. Proses pengukuran umumnya dilakukan dengan membandingkan antara standar ukur dan juga parameter yang akan dijadikan sebagai objek ukur. Jenis pengukuran juga beragam, mulai dari pengukuran panjang, massa, intensitas zat dan lain sebagainya. Pengukuran sendiri memegang peranan penting dalam segala sendi kehidupan. Sistem pengukuran sendiri sudah kita rasakan sejak di dalam kandungan hingga sampai ke liang lahat. Dalam hal ini, berarti pengukuran sendiri telah mengakar dan menjadi pendamping kita dalam kehidupan sehari-hari.
Setiap aktifitas kehidupan kita sehari-hari, tidak mungkin pernah terlepas dari kegiatan ukur mengukur, baik untuk skala kecil ataupun besar. Hal ini karena dari pengukuran dapat ditentukan kuantitas dan kualitas dari sebuah objek. Hasil pengukuran yang baik dari suatu kuantitas objek, dapat ditentukan berdasarkan tingkat presisi dan akurasi yang dihasilkan. Akurasi menunjukkan kedekatan nilai hasil pengukuran dengan nilai sebenarnya. Untuk menentukan tingkat akurasi perlu diketahui nilai sebenarnya dari besaran yang diukur dan kemudian dapat diketahui seberapa besar tingkat akurasinya. Presisi menunjukkantingkat keandalan dari data pengukuran yang diperoleh. Hal ini dapat dilihat dari standar deviasi yang diperoleh dari pengukuran, presisi yang baik akan memberikan standar deviasi yang kecil dan bias yang rendah. Jika diinginkan hasil pengukuran yang valid, maka perlu dilakukan pengukuran berulang, misalnya dalam penentuan nilai konsentrasi suatu zat dalam larutan dimana perlu dilakukan pengukuran berulang sebanyak n kali. Dari data tersebut dapat diperoleh pendekatan harga nilai terukur yaitu melalui perhitung an rata-rata dari hasil yang diperoleh dan standar deviasi. Ilustrasi sederhana untuk menjelaskan perbedaan antara presisi, akurasi dan bias dari suatu hasil pengukuran dapat dinyatakan sebagaimana pada gambar 2.1.
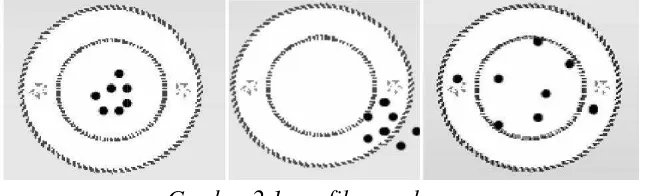
Gambar 2.1. profil pengukuran
hasil pengukuran analitik yang ideal. Pada gambar 1 (a) distribusi data cukup baik dan mendekati data aslinya. Hasil data dikatakan presisi dan akurat atau tidak menyimpang. Gambar 1 (b) menunjukkan distribusi data yang presisi, tetapi menyimpang dari target yang sebenarnya berarti data dikatakan tidak akurat. Gambar 1 (c) menggambarkan distribusi data yang menyebar dan hal ini menunjukkan bahwa data yang diperoleh tidak presisi.
Pengukuran panjang sendiri adalah salah satu bentuk kegia tan pengukuran. Pengukuran panjang sendiri adalah kegiatan mengukur jarak antar a dua buah garis yang saling berhubungan. Keduanya terletak pada ujung yang berbeda, namun terdapat satu buah garis yang menghubungkannya. Pengukuran panjang biasanya melibatkan alat ukur panjang, seperti ; mistar, tap ukur, ban ukur dan lain sebagainya. Alat ukur panjang yang beredar di masyarakat, hampir keseluruhannya meru pakan alat ukur manual berskala. Artinya, alat ukur tersebut masih berupa tongkat berskala, tali berskala dan sebagainya. Sehingga pembacaannya masih mengandalkan ketelitian mata.
Dalam perkembangannya, alat-alat ukur manual yang ada telah berevolusi seiiring berkembangnya teknologi. Standar ukuran berbagai satuan ukur juga telah diperbaharui. Hampir keseluruham standar ukur didefinisikan menggunakan standar non-fisik, terkecuali standar massa. Hal ini disebabkan karena standar non-fisik dianggap lebih akurat dan mudah dalam perawatannya.
2.1. Gelombang Ultrasonik sebagai Alat Ukur Panjang
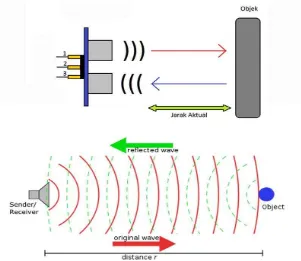
Pemanfaatan sensor ultrasonik sebagai alat ukur telah banyak digunakandalam dunia instrumentasi. Hal ini sesuai dengan perkembangan teknologi yang menuntut semuanya serba otomatis. Penggunaan sensor ultrasonik sebagai alat ukur bukan hanya sebagai imbas perkembangan teknologi belaka, melainkan juga memperhatikan berbagai aspek kemudahan dan kebutuhan yang didapatkan darinya. Prinsip kerja sensor ultrasonik sendiri adalah memantulkan gelombang ultrasonik melalui transceiver ke bidang pantul, dan menerima gelombangnya kembali melalui receiver. Dalam logikanya, prinsip tersebut dapat digunakan untuk mengetahui letak benda hingga mengukur letak benda tersebut. Melalui teori tersebut, gagasan pengukuran panjang menggunakan gelombang ultrasonic diimplementasikan menjadi sebuah alat.
Selain memudahkan user dalam melihat hasil ukur tanpa adanya indikasi kesalahan paralax, sensor ultrasonik yang digunakan dalam pengukuran jarak disinyalir dapat menghemat waktu. Hal ini dikarenakan gelombang ultrasonik merambat dengan kecepatan 340 m/s. Artinya dalam 1 detik transmisi, sinyal ultrasonik telah mencapai jarak sebesar 340 meter.
Gelombang ultrasonik umumnya merambat melalui udara. Artinya kecepatannya akan sama dengan kecepatan suara yang merambat pada udara. Untuk itu dalam pengukuran yang memerlukan waktu cepat dan tepat, gelombang ultrasonik sangat memungkinkan untuk digunakan. Selama kondisi pengujian terkondisi, artinya sesuai dengan spesifikasi sensor. Maka, dapat dipastikan bahwasannya hasil pengukuran yang dihasilkan oleh gelombang ultrasonik merupakan hasil pengukuran yang terstandar, akurat dan juga presisi. Tingkat akurasi yang dihasilkan oleh pengukuran melalui gelombang ultrasonik dapat dikatakan cukup baik, sehingga pada saat ini banyak industri yang telah memanfaatkan gelombang ultrasonik sebagai salah satu alat ukur mereka. Pengaplikasian gelombang ultrasonik umumnya hampir sama, namun dibedakan atas tujuannya. Misalkan, gelombang ultrasonik ada yang dimanfaatkan sebagai sonar/ detector bawah air, selanjutnya sebagai level water indicator dan maish banyak aplikasi yang lainnya.
2.2. Ultrasonic Ranging Module HC-SR04
untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.Piezoelektrik berfungsi untuk mengubah energi listrik menjadi energi mekanik. Bahan piezoelektrik adalah material yang memproduksi medan listrik ketika dikenai regangan atau tekanan mekanis. Sebaliknya, jika medan listrik diterapkan, maka material tersebut akan mengalami regangan atau tekanan mekanis. Jika rang kaian pengukur beroperasi pada mode pulsa elemen piezoelektrik yang sama, maka dapat digunakan sebagai transmitter dan reiceiver. Frekuensi yang ditimbulkan tergantung pada osilatornya yang disesuiakan frekuensi kerja dari masing-masing transduser. Karena kelebihan nya inilah maka tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik
Transmitter adalah sebuah alat yang berfungsi sebagai pemancar gelombang ultrasonik dengan frekuensi tertentu (misal, sebesar 40 kHz) yang dibangkitkan dari sebuah osilator. Untuk menghasilkan frekuensi 40 KHz, harus di buat sebuah rangk aian osilator dan keluaran dari osilator dil anjutkan menuju penguat sinyal. Besarnya frekuensi ditentukan oleh komponen RLC / kristal tergantung dari disain osilator yang digunakan. Penguat sinyal akan memberikan sebuah sinyal listrik yang diumpankan ke piezoelektrik dan terjadi reaksi mekanik sehingga bergetar dan memancarkan gelombang yang sesuai dengan besar frekuensi pada osilator.
memiliki reaksi yang reversible, elemen keramik akan membang kitkan tegangan listrik pada saat gelombang datang dengan frekuensi yang resonan dan akan menggetarkan bahan piezoelektrik tersebut.
Gambar 2.2. Sensor Ultrasonik HC-SR04
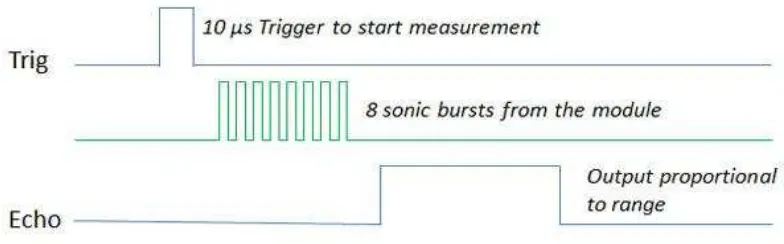
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukanjarak benda tersebut. Rumus untuk menghitungnya sudah saya sampaikan di atas. Berikut adalah visualisasi dari sinyal yang dikirimkan oleh sensor HC-SR04
Merupakan salah satu sensor ultrasonik yang dapat melakukan pengukuran jarak. Pengukuran jarak yang dilakukan oleh sensor ini termasuk mutakhir, yaitu tidak menggunakan sistem kontak langsung terhadap benda yang akan diukur jaraknya. Artinya modul HC-SR04 tidak secara langsung menyentuh benda yang diukur, melainkan menggunakan gelombang ultrasonik untuk mengetahui jarak benda yang akan diukur. Sensor ini sendiri memiliki spesifikasi pengukuran (electric parameter) sebagai berikut;
1. Memerlukan tegangan 5 V DC untuk melakukan kerja 2. Memerlukan arus sebesar 15 mA untuk melakukan kerja 3. Frekuensi yang dihasilkan sebesar 40 Hz
4. Maximum range yang dapat dijangkau oleh HC-SR04 adalah 400 cm (4m), sedangkan minimum range HC-SR04 adalah sebesar 2 cm sehingga range ukurnya adalah 2 cm < range >400 cm
5. Sensor dapat mengukur dalam jangkauan sudut sebesar 15 derajat
6. Memiliki trigger input signal sebesar 10 uS TTL Pulse dan Echo Output Signal tergantung pada sinyal input TTL
7. Dimensi HC-SR04 sendiri adalah 45 x 20 x 15 mm
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu didepannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara , dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama
sebuah system kerja tidak jauh berbeda antara satu dengan yang lainnya. Salah satu perangkat yang paling penting dalam sebuah alat elektronikyang dapat mendeteksi kejadian atau situasi yang adadi sekelilingnya. Mulaidari sensor suara, sensor api, dan sensor jarak. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.
Untuk itu dalam sistem modul sensor ultrasonik, terdapat dua buah modul yakni transceiver dan receiver. Transceiver berfungsi sebagai pengendali dan pemancar gelombang,ultrasonik terhadap benda yang akan diukur jaraknya sedangkan receiver merupakan penerima sinyal pantul dari benda yang diukur jaraknya. Keduanya menciptakan sitem pengukuran yang terstruktur, sehingga dapat aplikasikan dalam sistem perancangan sebuah alat ukur jarak .
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu
dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan
kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut
akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
2.2.1. Konfigurasi PIN HC-SR04
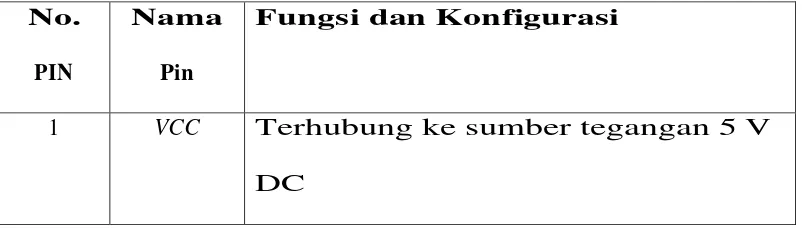
Untuk melakukan sebuah unjuk kerja, sensor ultrasonik tipe HC-SR04 harus dikonfigurasikan menggunakan pin-pinnya. Dimana konfigurasi pinnya ditunjukkan pada tabel 2.1. di bawah ini ;
Tabel 2.1. Konfigurasi PIN HC-SR04
2 Trig Untuk mengirimkan gelombang ultrasonic
3 Echo Untuk menerima pantulan gelombang ultrasonic
4 GND Terhubung ke ground
2.2.2. Prinsip Kerja Sensor Ultrasonik HC-SR04
Prinsip kerja sensor ini adalah menggunakan pantulan gelombang ultrasonik untuk mengetahui jarak yang akan diukur. Pada sensor ini, terdiri atas dua buah bagian, yaitu trigger dan echo. Trigger berfungsi sebagai pemancar gelombang ultrasonik. Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan waktu tertentu pula. Frekuensi yang digunakan oleh sensor ini umumnya adalah 40 Hz. Sensor tersebut akan merambat pada kecepatan suara yakni 340 m/s hingga mengenai benda yang akan diukur jaraknya. Apabila telah mengenai permukaan benda, maka sinyal akan kembali dipatulkan dan diterima oleh echo. Echo sendiri adalah receiver pada sensor ini. Apabila sinyal telah diterima oleh echo, maka sinyal selanjutnya diproses untuk menghitung jarak benda tersebut.
ukur. Sehingga seringkali alat ukur yang dapat digunakan dalam pengukuran ketiga besaran listrik disebut juga sebagai multimeter (berarti dapat mengukur tiga besaran tersebut dalam satu alat). Terkadang multimeter juga seringkali disebut sebagai AVO meter (Ampere-Volt-Ohm meter) yang dapat mengukur tiga besaran tersebut dalam satu alah. Percobaan kali ini akan membahas mengenai mekanisme kerja dari multimeter. Selain itu, kita juga akan membahas lebih lanjut mengenai sistematika pemasangan multimeter di berbagai sistem pengukuran besaran utama listrik. Fungsi listrik disini adalah sebagai pembangkit sinyal pada sensor ultrasonik HC-SR04. Seperti spesifikasi sensor yang telah tertera dalam datasheet sensor. Listrik yang digunakan adalah listrik searah atau direct current.
2.3. Arduino Uno R3 Kit
Gambar 2.5. Arduino Uno
Arduino uno R3 ini termasuk keluaran baru dan merupakan revisi dari versi arduino sebelumnya, dan memiliki beberapa fitur unggul dibandingkan jenis arduino lainnya. Referensi desain Arduino dapat menggunakan sebuah Atmega8, 168, atau 328, model saat ini menggunakan Atmega328, tetapi Atmega8 ditampilkan pada skema sebagai referensi. Konfigurasi pin identik pada semua ketiga prosesor tersebut Arduino uno adalah sebuah board mikrokontroler yang didasarkan pada ATmega328. Arduino uno mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino uno memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah menghubungkannya ke sebuah komputer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya.
komputer yang sedang terhubung. Salah satu garis kontrol aliran hardware (DTR) dari ATmega8U2/16U2 sihubungkan ke garis reset dari ATmega328 melalui sebuah kapasitor 100 nanofarad. Ketika saluran ini dipaksakan (diambil rendah), garis reset jatuh cukup panjang untuk mereset chip. Software Arduino menggunakan kemampuan ini untuk memungkinkan kita untuk mengupload kode dengan mudah menekan tombol upload di software Arduino. Ini berarti bahwa bootloader dapat mempunyai sebuah batas waktu yang lebih singkat, sebagai penurunan dari DTR yang dapat menjadi koordinasi yang baik dengan memulai penguploadan.
Pengaturan ini mempunyai implikasi. Ketika Arduino Uno dihubungkan ke sebuah komputer lain yang sedang running menggunakan OS Mac X atau Linux, Arduino Uno mereset setiap kali sebuah koneksi dibuat dari software (melalui USB). Untuk berikutnya, setengah-detik atau lebih, bootloader sedang berjalan pada Arduino uno. Ketika Arduino uno diprogram untuk mengabaikan data yang cacat/salah (contohnya apa saja selain sebuah penguploadan kode baru) untuk menahan beberapa bit pertama dari data yang dikirim ke board setelah sebuah koneksi dibuka. Jika sebuah sketch sedang berjalan pada board menerima satu kali konfigurasi atau data lain ketika sketch pertama mulai, memastikan bahwa software yang berkomunikasi menunggu satu detik setelah membuka koneksi dan sebelum mengirim data ini.
resistor yang menarik garis 8U2 HWB ke ground, yang membuatnya lebih mudah untuk diletakkan ke dalam DFU mode. Revisi 3 dari board Arduino Uno memiliki fitur-fitur baru sebagai berikut:
Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke depannya, shield akan dijadikan kompatibel/cocok dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya
Sirkuit RESET yang lebih kuat Atmega 16U2 menggantikan 8U2
“Uno” berarti satu dalam bahasa Italia dan dinamai untuk menandakan
keluaran (produk) Arduino 1.0 selanjutnya. Arduino UNO dan versi 1.0 akan menjadi referensi untuk versi-versi Arduino selanjutnya. Arduino UNO adalah sebuah seri terakhir dari board Arduino USB dan model referensi untuk papan Arduino, untuk suatu perbandingan dengan versi sebelumnya.
2.3.1. Spesifikasi Arduino Uno R3
Secara umum, spesifikasi kit Arduino Uno R3 dapat dilihat padatabel berikut ini :
Tabel 2.2. Spesifikasi Arduino Uno R3
Mikrokontroler ATMEGA 328
Input voltage 7 – 12 V (recommended) Input voltage 6 – 20 V (limit)
Digital I/O pins 14 ( 6 provide PWM output)
Analog input pins 6 DC current/ I/O pins
40 mA
DC Current fot 3,3 V pin 50 mA
Flash memory 32 KB
SRAM/ EPROM 2 KB/ 1 KB
Clock Speed 16 Mhz
- VIN. Tegangan input ke Arduino board ketika board sedang menggunakan sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lainnya yang diatur). Kita dapat menyuplai tegangan melalui pin ini, atau jika penyuplaian tegangan melalui power jack, aksesnya melalui pin ini.
- 5V. Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada board. Board dapat disuplai dengan salah satu suplai dari DC power jack (7-12V), USB connector (5V), atau pin VIN dari board (7-12). Penyuplaian tegangan melalui pin 5V atau 3,3V membypass regulator, dan dapat membahayakan board. Hal itu tidak dianjurkan.
- 3V3. Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus maksimum yang dapat dilalui adalah 50 mA.
- GND. Pin ground.
Setiap 14 pin digital pada Arduino Uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digital Write(),dan digital Read(). Fungsi-fungsi tersebut beroperasi di tegangan 5 Volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai fungsi-fungsi spesial:
penurunan yang besar, atau suatu perubahan nilai. Lihat fungsi attachInterrupt() untuk lebih jelasnya.
PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsi analogWrite().
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakan SPI library.
LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
Arduino uno mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yangberbeda). Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya dengan menggunakan pin AREF dan fungsi analogReference(). Di sisi lain, beberapa pin mempunyai fungsi spesial. TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library. Ada sepasang pin lainnya pada board, AREF. Referensi tegangan untuk input analog. Digunakan dengan analogReference(). Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang memblock sesuatu pada board.
2.4 LCD (Liquid Crystal Display)
karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang disajikan dalam LCD ini adalah :
1. Terdiri dari 16 karakter dan 2 baris 2. Mempunyai 192 karakter tersimpan 3. Terdapat karakter generator terprogram 4. Dapat dialamati dengan mode 4-bit dan 8-bit 5. Dilengkapi dengan back light.
6. Tersedia VR untuk mengatur kontras.
7. Pilihan konfigurasi untuk operasi write only atau read/write. 8. Catu daya 5 Volt DC.
9. Kompatibel dengan DT-51 dan DT-AVR Low Cost Series serta sistem mikrokontroler/mikroprosesor lain.
2.4.1. Pengalamatan Pada Display LCD
Display pada LCD juga memiliki pengalamatan tertentu, sepertihalnya seven segment. Pengalamatan tersebut digunakan pada saat akanprogramming LCD untuk menampilkan karakter tertentu. Alamat-alamatnya dapat dilihat pada gambar dibawah ini ;
Pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit
atau 8-bit. Jika jalurdata 4-bit maka yang digunakan ialah DB4 sampai denganDB7. Sebagaimana terlihatpada table diskripsi, interface LCDmerupakan sebuah parallel bus,dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu. Jika mode 4-bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit (pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap nibblenya). 19 Jalur kontrol EN digunakan untuk memberitahu LCD bahwa mikrokontroller mengirimkan data ke LCD. Untuk
mengirim data ke LCD program harus menset EN ke kondisi high “1” dan
kemudian menset dua jalur kontrol lainnya (RS dan R/W) atau juga mengirimkan
data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke “0” dan
tunggu beberapa saat (tergantung pada datasheet LCD), dan set EN kembali ke
high “1”. Ketika jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke
LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti bersihkan
layar, posisi kursor dll). Ketika RS dalam kondisi high atau “1”, data yang
dikirimkan adalah data ASCII yang akan ditampilkan dilayar. Misal, untuk
menampilkan huruf “A” pada layar maka RS harus diset ke “1”. Jalur kontrol
R/W harus berada dalam kondisi low (0) saat informasi pada data bus akan
dituliskan ke LCD. Apabila R/W berada dalam kondisi high “1”, maka program
“0”. Jalur data dapat terdiri 4 atau 8 jalur(tergantung modeyang dipilih
pengguna), DB0, DB1, DB2,DB3, DB4, DB5,DB6 dan DB7. Mengirim data secara parallel baik4-bit atau 8-bit merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting.Mode 8-bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk data).Sedangkan mode 4 bit minimal hanya membutuhkan 7-bit (3 pin untuk kontrol, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara mikrokontroller dan LCD. Jika bit ini di set (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.5. Potensiometer
Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
dimulai dari tahanan 0 ohm sampai dengan 100k ohm. Jadi dengan begitu, nilai yang di hasilkan dari sebuah tahanan potensio terbukti berubah-ubah. Dengan kemampuan yang dapat mengubah resistansi atau hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika dengan fungsi-fungsi sebagai berikut :
Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti
Amplifier, Tape Mobil, DVD Player.
Sebagai Pengatur Tegangan pada Rangkaian Power Supply
Sebagai Pembagi Tegangan
Aplikasi Switch TRIAC
Digunakan sebagai Joystick pada Tranduser
Sebagai Pengendali Level Sinyal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu 1. Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur
dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
2. Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.
Prinsip Kerja (Cara Kerja) Potensiometer Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer. Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
2.6. Software Arduino 1.6
bahasa pemrograman digunakan untuk membuat mikrokontroler yang digunakan dalam sistem dapat sejalan dengan tujuan pengukuran tersebut.
Karena menggunakan Arduino Uno, maka software pemrograman yang digunakan juga berasal dari satu perusahaan yang sama. Software Arduino sendiri merupakan tempat untuk memrogram kit Arduino sesuai dengan kehendak yang kita mau. Bahasa pemrograman yang digunakan adalah bahasa pemrograman berbasis C, artinya fungsi-fungsi dan karakteristik yang didekla rasikan didalam proses pemrograman Arduino menggunakan metode yang sama dengan pendeklarasian bahasa C.
Gambar 2.8. Tampilan Awal Software Arduino 1. 6
Bahasa C ada lah evolusi dari bahasa B yang dikembangkan oleh Dennis Ritchie, merupakan general-purpose language, yaitu bahasa pe mrograman yang dapat digunakan unt uk tujuan apa saja. Bahasa C mempunyai kemampuan lebih dari bahasa pemrograman lain. Banyak sekali aplikasi-aplikasi yang dibangun dengan bahasa C, mulai dari pemrograman sistem, aplikasi cerdas ( artifical intelligence), sistem, pakar, utility, driver, database, browser, network programming, sistem operasi, game, virus, dan lainnya, bahkan Software Development Kit untuk Windows juga ditulis dalam bahasa C.
dalam middle level language, perangkat keras, juga kecepatan prosesnya yang mendekati low level language seperti Assembly, tetapi memberikan kemudahan yang tidak ditawarkan Assembly. Disamping itu, bahasa C jauh lebih mudah untuk dipelajari jika dibandingkan dengan bahasa low level karena mendekati frase-frase dalam bahasa manusia, yaitu bahasa Inggris.
Bahasa C juga mempunyai banyak keuntungan dibanding bahasa pemrograman lain. Dikarenakan kokoh dan memberikan keleluasaan kepada penggunanya, pada tahun 80-an, penggunaan bahasa C di dunia industri semakin luas, sehingga distandarisasi oleh ANSI dan kemudian diadopsi oleh ISO, lalu diadopsi ulang oleh ANSI. Official name bahasa C adalah ISO/IEC 9899-1990. Bahas C mempunyai beberapa kelebihan dibandingkan bahasa lain seperti assembly, diantaranya: Bahasa C tersedia hampir di semua jenis komputer, kode Bahasa C bersifat portable, berbagai struktur data dan pengendalian proses disediakan dalam Bahasa C sehingga pembuatan program lebih terstruktur, mudah dipahami tanpa harus mengetahui mesin secara detail, memungkinkan manipulasi data dalam bentuk bit maupun byte.
Bagian ini disebut preprocessor Directive, yang artinya bagian yang digunakan untuk mengikut-sertakan berkas-berkas file header/library yang berisi fungsi-fungsi yang ada pada program yang akan dibuat pada baris-baris bawahnya. File yang diikutsertkan bernama stdio.h yang terletak di suatu direktori pada instalasi DevC++.
Pada baris selanjutnya int main (). merupakan judur fungsi utama program yang bernama fungsi main () yang mengambilkan nilai berupa integer (bilangan bulat negatif ataupun positif ) mengenai data integer akan dibahas di bagian-bagian berikutnya. Fungsi main () adalah fungsi yang wajib ada di setiap kode program yang ditulis menggunakan bahasa C. tanda { merupakan tanda awal program. Terdapat printf("selamat datang di DevC++");. Hal ini merupakan perintah untuk menampilkan output di layar monitor berupa tulisan" Selamat datang di DevC++" (tanpa tanda kutip).
Perintah untuk menampilkan tulisan ke layar disebut fungsi Printf () yagn menerimakan masuk berupa kalimat yang ingin ditampilkan. Tanda titik koma harus selalu dituliskan untuk memberi. akhr dari suatu baris perintah. pada baris berikutnya terdapat getch ();, digunakan untuk menghentikan layar tampilan sejenak samapi pengguna menekan tombol yang ada pada keyboard. Jadi fungsinya adalah menunggu penekanan tombol tertentu dan kemudian program akan mati (terminated) baris terakhir berisi } yang merupakan akhir dari program. Bahasa C memiliki beberapa elemen dasar seperti ;
- Keyword, Keyword adalah suatu kata yang memiliki makna dan fungsi tertentu, karena itu ia disebut juga reserved word.
- Identifier, Identifier dapat dikatakan sebagai suatu tempat untuk menyimpan nilai. Identifier dapat diberi nama unik dan bisa memiliki tipe data. Ia dibagi menjadi dua: Konstanta: nilainya tetap selama program berjalan (dieksekusi),cara untuk mengubahnya hanya melalui source code saja. Variabel: nilainya dapat berubah atau diubah selama program berjalan(dieksekusi).
- Tipe data, Merupakan pengelompokan data yang digunakan untuk merepresentasikan jenis sebuah nilai yang terdapat pada program.
- Operator, Operator berkaitan erat dengan kata operasi. Operator ditandai dengan sebuah atau beberapa simbol dan kata.
- Punctuator, Punctuator adalah simbol-simbol yang berkenaan sebagai tanda baca pada struktur penulisan bahasa C.
Dibawah ini adalah contoh program bahasa C: #include
<stdio.h> int main()
{
int a,b,c;
printf("Enter the first
value:”); scanf(“%d”,&a);
printf("Enter the second
c = a + b;
printf("%d + %d = %d\n",a,b,c); return 0
}
Dari contoh diatas dapat disimpulkan bahwa struktur program bahasa C adalah: - Adanya fungsi main. Suatu program C minimal harus memiliki function
main(), tanpa function itu maka program C tidak dapat dieksekusi tapi bisa dikompilasi.
- Lalu statement, Statement adalah suatu baris instruksi/perintah tertentu. Statement menyebabkan suatu tindakan akan dilakukan oleh komputer. - Preprosessor Directive adalah bagian yang berisi pengikutsertaan file
atauberkas-berkas fungsi maupun pendefinisian konstanta atau fungsi makro tertentu.
- Deklarasi variabel menyebabkan komputer menyediakan tempat yang diberi nama (identifier) a, bdan cdengan ukuran integer (2 byte = 16 bit). - printf akan membuat komputer mengirim teks yang berada dalam fungsi
tersebut ke layar monitor, sedangkan scanf membuat komputer menanti masukan dari pemakai melalui keyboard.
- Adanya proses. Pada program ini akan dikerjakan proses aritmatika, yaitu
proses memberi nilai (assignmentyang dipakai tanda “=”) variabel
“c”dengan nilai yang ada dalam variabel “a”ditambah nilai yang ada
dalam variabel “b”.
- Selain function main(), dapat ditambahkan function lain.