i
TUGAS AKHIR
PENGATUR SUHU DAN OTOMATISASI PENGISIAN
ULANG SERBUK KAYU DAN PASIR ZEOLIT PADA
KANDANG SEHAT HAMSTER BERBASIS
MIKROKONTROLER ATMEGA8535
disusun oleh :
JOHFINES WIJAYA
NIM : 055114029
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
TEMPERATURE CONTROLER AND AUTOMATION
REFILLING UP SAWDUST DAN ZEOLIT SAND AT
HAMSTER’S HEALTHY CAGE USING ATMEGA8535
COMPOSED BY :
JOHFINES WIJAYA
NIM : 055114029
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vii
INTISARI
Minat masyarakat akan pemeliharaan binatang marak terlihat pada akhir-akhir ini. Keadaan ini terjadi dikarenakan adanya kesibukan-kesibukan yang sering dijumpai pada era globalisasi yang menuntut agar tiap manusia dapat berkerja keras dalam memenuhi kebutuhan sehari – hari, sehingga akibat kesibukan ini banyak orang mengalihkan kepenatan dengan cara memelihara binatang tidak terkecuali dengan hamster. Akan tetapi cara merawat yang salah akan berakibat fatal bagi hamster. Tujuan dari pembuatan kandang sehat hamster ini adalah untuk menganti serbuk kayu dan pasir zeolit secara otomatis serta pengaturan suhu yang cocok bagi hamster pada kandang dengan menggunakan mikrokontroler sebagai “otaknya”.
Kandang menggunakan sistem timer dalam mengganti serbuk kayu dan pasir zeolit secara berkala dan otomatis. Pergantian serbuk kayu dengan yang baru dilakukan setiap satu minggu sekali sedangkan pergantian pasir zeolit dengan yang baru dilakukan setiap satu hari sekali. Hal ini dilakukan agar serbuk kayu dan pasir zeolit yang telah menjamur dan busuk tidak membuat hamster menjadi sakit. Pengisian dan pembuangan masing – masing menggunakan satu motor DC. Termoelektrik digunakan untuk mengatur suhu. Pengontrolan suhu menggunakan prinsip PID yang berasal dari PWM mikrokontroler.
Hasil pengamatan menunjukkan bahwa kandang sehat hamster bekerja cukup baik kecuali pada pengatur suhu. Hal ini disebabkan oleh termoelektrik yang digunakan tidak mampu untuk mencapai suhu yang diinginkan yaitu sebesar 22oC.
viii
ABSTRACT
The interest of keeping animal raises recently in the society. This condition occurs because there are many activities that can be found in this globalization era making human beings working hard in fulfilling their daily needs. So, the effect of these activities makes many people reduce their stress by keeping animal, especially hamster. But, if the way of caring the hamster is wrong, it will be fatal to the hamster. The purpose of making a healthy hamster cage is not only to change the sawdust and zeolit sand otomatically, but also to regulate the suitable temperature for the hamster to the cage by using microcontroller as the controller.
This cage uses timer system in changing the sawdust and zeolit sand periodically and automatically. The sawdust will be changed into the new one once a week, while the change of zeolit will be done once a day. It is done, so the sawdust and zeolit sand that have been mushroom and decomposed will not make the hamster ill. Each filling and wasting uses one motor DC. Thermoelectric is used to regulate the temperature. The controller of temperature uses PID digital principle which is from the microcontroller.
The observation result shows that the healthy cage works good enough, except the temperature controller. This is caused by the used thermoelectric can not reach the desire temperature that is 22℃.
ix
KATA PENGANTAR
Puji dan syukur atas karunia dan bimbingan tuhan sehingga Penulis dapat menyelesaikan
perancangan Tugas Akhir “Pengatur Suhu dan Otomatisasi Pengisian Ulang Serbuk Kayu dan
Pasir Zeolit Pada Kandang Sehat Hamster Berbasis Mikrokontroler ATMEGA8535” beserta
penulisan laporan ini.
Tugas Akhir ini dibuat sebagai salah satu syarat untuk meraih gelar Sarjana Strata 1 (S1)
pada jurusan Teknik Elektro Fakultas Sains dan Teknologi Universitas Sanata Dharma
Yogyakarta.
Berkat dukungan dari banyak pihak, Penulis dapat menyelesaikan Tugas Akhir ini
dengan baik. Dan dengan tulus hati, Penulis menyampaikan terima kasih yang sebesar –
besarnya kepada pihak yang telah membantu demi lancarnya penyelesaian Tugas Akhir ini :
1.
Ibu B. Wuri Harini S.T., M.T. selaku Pembimbing I yang telah memberikan bimbingan
dan arahan kepada Penulis dari awal hingga Tugas Akhir ini selesai.
2.
Keluarga, yang telah memberikan dukungan moral dan ekonomi sehingga Tugas Akhir
ini dapat selesai.
3.
Bapak Damar Widjaja, S.T., M.T., selaku Pembimbing Akademik yang telah membantu
dan memberi arahan dari awal hingga akhir masa kuliah.
4.
Jansen Simatupang, yang telah membantu, dan mendukung hingga terselesaikannya
Tugas Akhir ini.
5.
Para dosen, laboran, dan staf administrasi jurusan Teknik Elektro Universitas Sanata
Dharma dan semua pihak yang selama ini secara tidak langsung telah banyak membantu
xi
DAFTAR ISI
SAMPUL BAHASA INDONESIA--- i
SAMPUL BAHASA INGGRIS--- ii
HALAMAN PERSETUJUAN--- iii
HALAMAN PENGESAHAN--- iv
LEMBAR PERSETUJUAN PUBLIKASI KARYA ILMIAH--- v
PERNYATAAN KEASLIAN KARYA--- vi
INTISARI--- vii
ABSTRACT--- viii
KATA PENGANTAR--- ix
DAFTAR ISI--- vi
DAFTAR GAMBAR--- viii
DAFTAR TABEL--- x
BAB I PENDAHULUAN 1.1Latar Belakang--- 01
1.2Tujuan dan Manfaat Penelitian--- 02
1.3Batasan Masalah--- 03
1.4Metodologi Penelitian--- 03
BAB II DASAR TEORI 2.1 Hamster--- 05
2.2 Mikrokontroler ATMega8535--- 06
2.2.1 Fitur yang Dimiliki ATMega8535--- 06
2.2.1.1 Analog to Digital Converter--- 06
2.2.1.2 Pulse Width Modulation--- 09
2.2.2 Konfigurasi Pin--- 12
2.2.3 Timer ATMega--- 13
2.2.3.1 Timer/Counter0--- 13
2.2.3.2 Timer/Counter1--- 13
2.2.3.3 Timer/Counter2--- 13
2.4 Saklar Batas (Limit Switch)--- 14
xii
2.6 LCD--- 15
2.7 Termoelektrik--- 17
2.8 Operational Amplifier--- 17
2.9 Sensor Suhu--- 18
2.10 Kontrol Sistem--- 18
2.11 Kapasitor--- 21
BAB III RANCANGAN PENELITIAN 3.1 Pra Penelitian--- 22
3.2 Sistem Pasir Zeolit--- 23
3.3 Sistem Serbuk Kayu--- 31
3.4 Sistem Suhu--- 38
3.5 Kerangka--- 43
3.6 Regulator--- 47
3.7 Penentuan PORT pada Mikrokontroler--- 48
BAB IV HASIL DAN PEMBAHASAN 4.1 Tampilan Sistem pada Kandang Sehat Hamster--- --- 49
4.2 Pengujian Sistem Serbuk Kayu--- --- 54
4.3 Pengujian Sistem Pasir Zeolit--- 55
4.4 Pengujian Timer--- 56
4.5 Pengujian Sistem Suhu--- 57
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan--- 63
5.2 Saran--- 63
DAFTAR PUSTAKA--- 64
xiii
DAFTAR GAMBAR
Gambar 2.1 Register ADMUX--- 07
Gambar 2.2 Register OCR1AH/L dan OCR1BH/L--- 09
Gambar 2.3 Register ICR1H/L--- 09
Gambar 2.4 Fast Pulse Width Modulation--- 10
Gambar 2.5 Konfigurasi Pin ATMega8535--- 12
Gambar 2.6 Limit Switch--- 14
Gambar 2.7 IC L293 D--- 15
Gambar 2.8 LCD--- 16
Gambar 2.9 Termoelektrik--- 17
Gambar 2.10 Rangkaian Penguat Non-Inverting--- 18
Gambar 2.11 Sensor Suhu--- 18
Gambar 2.12 Sistem Kontrol Kalang Tertutup--- 19
Gambar 2.13 Kurva Metode Ziegler – Nichols--- 20
Gambar 3.1 Diagram Alir Sistem Pasir Zeolit--- 24
Gambar 3.2 Posisi Alas Permukaan, Limit Switch, dan Motor--- 25
Gambar 3.3 Rancangan Pengisian Ulang Pasir Zeolit Otomatis--- 25
Gambar 3.4 Rangkaian Pengisi Pasir Zeolit--- 26
Gambar 3.5 Rangkaian Pembuang Pasir Zeolit yang Telah Kotor--- 28
Gambar 3.6 Rancangan Pengisian Ulang Serbuk Kayu Otomatis--- 31
Gambar 3.7 Diagram Alir Sistem Serbuk Kayu--- 32
Gambar 3.8 Rangkaian Pengisi Serbuk Kayu--- 33
Gambar 3.9 Rangkaian Pembuang Serbuk Kayu yang Telah Kotor--- 35
Gambar 3.10 Penguat Non-Inverting--- 39
Gambar 3.11 Diagram Alir Sistem Suhu--- 40
Gambar 3.12 Rangkaian Driver Termoelektrik--- 41
Gambar 3.13 Rancangan Pengatur Suhu Otomatis--- 41
Gambar 3.14 Rangkaian Penampil LCD--- 42
Gambar 3.15 Gambar Rangka Kandang Sehat Hamster Bersama Motor--- 43
Gambar 3.16 Gambar Rangka Kandang Sehat Hamster--- 44
Gambar 3.18 Gambar Rangka Kandang Sehat Hamster Bersama Botol--- 45
xiv
Gambar 3.20 Penyatu Tampungan Sampah Serbuk Kayu dan Pasir Zeolit--- 46
Gambar 3.21 Alas Permukaan dan Penggerak Alas Permukaan--- 46
Gambar 3.22 Alas Permukaan Dilihat Dari Atas--- 47
Gambar 4.1 Kandang Sehat Hamster yang Telah Dibuat--- 49
Gambar 4.2 Kandang Sehat Hamster Tampak Atas--- 50
Gambar 4.3 Sistem Kontrol Kandang Hamster--- 50
Gambar 4.4 Isi Dalam Kandang Sehat Hamster--- 51
Gambar 4.5 Sisi Bawah Penutup Kandang dan Motor Pembuang--- 52
Gambar 4.6 Kandang Sehat Hamster Tampak Samping dan Depan--- 52
Gambar 4.7 Pengisi Serbuk Kayu dan Pasir Zeolit Tampak Dekat--- 53
Gambar 4.8 Pengisi Serbuk Kayu dan Pasir Zeolit Dari Atas--- 53
Gambar 4.9 Sensor Suhu Pada Kandang Sehat Hamster--- 57
Gambar 4.10 Pengatur Suhu Kandang Sehat Hamster--- 57
Gambar 4.11 Tanggapan Suhu Terhadap Waktu--- 58
Gambar 4.12 Tanggapan Suhu Terhadap Waktu Data Pertama--- 58
Gambar 4.13 Tanggapan Suhu Terhadap Waktu Data Kedua--- 59
Gambar 4.14 Tanggapan Suhu Terhadap Waktu Data Ketiga--- 59
xv
DAFTAR TABEL
Tabel 2.1 Konfigurasi Bit ADMUX--- 08
Tabel 2.2 Konfigurasi Bit ADPS--- 08
Tabel 2.3 Konfigurasi Bit CS--- 11
Tabel 2.4 Deskripsi Pin--- 12
Tabel 2.5 Pengaturan Bit Clock Select--- 14
Tabel 2.6 Konfigurasi Pin LCD--- 16
Tabel 2.7 Ziegler – Nichols--- 21
Tabel 3.1 Kebutuhan Arus Maksimum Perancangan Kandang--- 47
Tabel 3.2 Penggunaan PORT Pada Mikrokontroler Kandang--- 48
Tabel 4.1 Pengujian Berat Serbuk Kayu Setiap Pengisian--- 54
Tabel 4.2 Pengujian Pergerakan Motor--- 54
Tabel 4.3 Pengujian Berat Pasir Zeolit Setiap Pengisian--- 55
Tabel 4.4 Pengujian Pergerakan Motor--- 55
Tabel 4.5 Pengujian Timer Pada Kandang Sehat Hamster--- 56
Tabel 4.5 Data Pengujian Pengatur Suhu--- 57
BAB I
PENDAHULUAN
1.1
Latar Belakang
Perkembangan teknologi global khususnya pada bidang control semakin berkembang
pesat kearah mikrokontroler, sehingga suatu system elektronika yang rumit menjadi lebih
sederhana[1]. Hal ini merupakan kemajuan yang sangat berarti untuk memudahkan
kehidupan masyarakat sekarang yang serba sibuk dalam memenuhi kebutuhan. Teknologi
mikrokontroler dapat menghasilkan suatu alat otomatis, baik dari skala industri sampai skala
rumah tangga dalam memenuhi kebutuhan masyarakat hampir dalam setiap bidang, salah
satunya bidang hobi.
Masyarakat sekarang yang telah disibukkan oleh pekerjaan, membutuhkan suatu
hiburan untuk menghilangkan stes[2]. Mengerjakan hobi merupakan salah satu cara untuk
menghilangkan stress yang sangat manjur. Akhir – akhir ini hobi memelihara hewan
sangatlah berkembang khususnya pada hamster. Hal ini diketahui karena semakin banyak
forum – forum internet yang membahas cara memelihara hamster yang baik. Masyarakat
suka memelihara hamster dikarenakan hamster merupakan hewan yang lucu dan
menggemaskan, disamping itu harga hamster tergolong murah sehingga cocok untuk segala
kalangan masyarakat khususnya mahasiswa walaupun ada beberapa jenis hamster yang
harganya selangit.
Kandang yang telah ada masih jauh dari harapan yang diinginkan oleh masyarakat.
Yang diinginkan oleh masyarakat adalah kandang yang lebih praktis. Kandang yang telah
ada masih sebatas tempat tinggal. Pengurusan pangan, pasir zeolit, dan serbuk kayu masih
dilakukan secara manual. Suhu dalam kandang masih tergantung pada suhu yang berada di
luar kandang. Hal yang diinginkan masyarakat pemelihara hamster adalah kandang yang
dapat bekerja secara otomatis dalam pengurusan kandang serta kandang yang tidak
dipengaruhi oleh suhu luar.
Hal ini dikarenakan manusia kadang mengabaikan kerutinan dalam pemeliharaan
kandang yang teratur oleh karena kesibukan yang menyita waktu[3]. Hal ini dapat
menyebabkan kerugian bagi pemelihara dan juga binatang peliharaan tersebut. Misalnya
dengan penyakit yang akan bias ditimbulkan dari binatang tersebut terhadap manusia itu
sendiri. Dengan demikian diharapkan dengan kandang ini pemelihara tidak dituntut untuk
tekun dalam memelihara kesehatan binatang tersebut.
Banyak kasus kematian binatang peliharaan disebabkan oleh sang pemelihara[4].
Sang pemelihara disibukkan oleh urusan – urusan yang lain. Hal itu menyebabkan kurang
terpeliharanya binatang tersebut. Kurang terjaganya suhu, kebersihan dan makanan yang
sering dilupakan oleh sang pemelihara.
Untuk memelihara hamster secara benar dalam artian sesuai dengan habitatnya
tidaklah gampang dikarenakan banyaknya factor yang mempengaruhi pemeliharaan tersebut.
Untuk itu perlu diteliti habitat dan pola hidupnya, agar alat yang akan dirancang lebih tepat
guna.
Kebersihan dalam memelihara hamster juga merupakan salah satu masalah yang
tidak mudah ditangani. Pembersihan kandang yang tidak rutin akan mengakibatkan
timbulnya penyakit – penyakit dikarenakan bakteri – bakteri yang berasal dari kotoran
hamster sendiri. Pasir zeolit merupakan tempat yang disukai hamster untuk membuang
kotoran. Untuk itu pasir ini harus diganti setiap hari. Serbuk kayu merupakan tempat
hamster melatih gigi agar tajam, dan juga sebagai tempat bagi hamster untuk
memendekkan gigi, karena binatang pengerat mempunyai gigi yang selalu tumbuh
sepanjang hidupnya. Serbuk kayu ini setidaknya dalam satu minggu harus diganti minimal
sekali agar serbuk kayu yang telah kotor karena gigitan sebelumnya dan keringat tidak
tertelan pada saat menggigit – gigit atau disentuh oleh hamster, suhu pada habitat asli
hamster berkisar sekitar 18
oC sampai 25
oC sedangkan suhu di Indonesia di antara 27
oC
sampau 31
oC.
Hamster merupakan binatang dari daratan kering yang tidak membutuhkan
kandungan air yang banyak. Hamster yang basah oleh keringat dari tubuh saja dapat
mengakibatkan kematian pada hamster itu sendiri. Untuk itu kandang hamster harus
sekering mungkin
1.2
Tujuan dan Manfaat Penelitian
Tujuan penelitian ini adalah menghasilkan kandang hamster yang bias memelihara
kesehatan hamster melalui pengaturan suhu, dan pergantian pasir zeolit, serta serbuk kayu
secara otomatis. Pengguna kandang juga dapat memantau kondisi temperature suhu dalam
penerapannya, yaitu: Sebagai pengganti pengguna dalam memelihara kandang hamster
secara sehat.
Dengan adanya beberapa kegunaan dari alat ini, diharapkan dapat mencapai
keinginan dan dapat digunakan sebagai wadah penelitian. Hal ini dikarenakan kandang ini
dapat bekerja sebagai pengganti habitat aslit hamster tersebut.
1.3
Batasan Masalah
Perancangan penelitian ini lebih diutamakan dalam batasan – batasan masalah
sebagai berikut:
a.
Menggunakan mikrokontroler tipe AVR ATMEGA8535
b.
Alat yang dirancang berukuran panjang 35cm, lebar 40cm, dan tinggi 20cm
c.
Pengatur suhu menggunakan pengontrol dengan mode PID
d.
Alat pengatur suhu menggunakan termoelektrik
e.
Penampil suhu dalam kandang menggunakan LCD 2x16 dot
1.4
Metodologi Penelitian
Penulisan penelitian ini menggunakan metode:
a.
Mengumpulkan bahan – bahan referensi berupa buku – buku dan jurnal – jurnal serta
meneliti tentang kehidupan hamster
b.
Mengumpulkan bahan – bahan referensi berupa buku – buku dan jurnal – jurnal
mengenai mikokontroler AVR ATMEGA8535, Driver, serta Motor
c.
Menentukan rancangan kandang sehat hamster yang tepat dengan ukurannya
d.
Menentukan alat dan bahan yang akan digunakan untuk membuat kandang sehat
hamster
e.
Membuat kerangka dari akrelik yang sesuai dengan desain rancangan kandang yang
telah dibuat
f.
Pembuatan system pengisian ulang serbuk kayu dan pasir zeolit dimana material
yang lama dibuang dan digantikan dengan material yang baru
g.
Pembuatan system pengatur suhu, dalam hal ini sensor suhu akan menjaga suhu
berada pada sekitar 19
oC sampai 24
oC dengan menggunakan pengontrol PID
h.
Pengambilan data alat. Setelah alat rampung, akan diambil datanya berupa data suhu
terhadap waktu (Dalam hal ini keluaran tegangan sensor LM35 akan didata),
i.
Data yang telah didapat akan dianalisis efisiensinya dan data alat akan disimpulkan
persentase keberhasilan dan kesalahan alat
Perancangan ini merupakan bagian dari perancangan kelompok kandang sehat
hamster dengan anggota tiga orang (Dua orang lainnnya bernama Jansen
Simatupang\055114034
dari
Program
Studi
Teknik
Elektro
dan
Wisnu
BAB II
DASAR TEORI
2.1 Hamster
Gigi hewan pengerat tidak pernah berhenti [3]. Oleh sebab itu hamster harus
menggigit sesuatu yang keras secara terus menerus. Pemelihara harus memberi sesuatu
yang keras kepada hamster. Sayuran terlalu lunak bagi hamster, untuk itu pemeliharan
dapat member pellet yang keras atau sepotong kayu.
Hamster adalah binatang sejenis hewan pengerat, terdapat berbagai jenis didunia
dan hamper ada di tiap Negara [4]. Hamster termasuk ke adalam subfamily cricentinae.
Subfamilie ini terbagi ke dalam sekitar 18 species, yang diklasifikasikan ke adalam enam
atau tujuh genus. Hamster seringkali digunakan sebagai hewan percobaan di laboratorium
(karena reproduksi hamster yang cepat) bersama tikus dan hewan pengerat lainnya.
Habitat hamster diutara terletak di eropa tengah sampai Siberia, Mongolia, dan
Tiongkak utara sampai Korea. Habitat hamster di selatan membentang dari suriah sampai
Pakistan. Hamster hidup di perbatasan padang pasir., buit pasir yang di vegetasi, bukit di
kaki gunung dan datran rendah yang bersemak – semak dan berbatu, sungai di lembah, dan
padang rumput yang luas, beberapa juga tinggal di lading tanaman. Distribusi geografi
membagi beberapa spesies contohnya hamster eropa di temukan di Eropa tengah dan
Siberia barat dan serta Tiongkok barat laut, tetapi hamster emas hanya ditemukan dikota
kecil di Suriah barat laut.
Karena ukuran hamster yang kecil, rumah yang cocok untuk hamster, karena
hamster akan mengerat kayu tersebut. Lem maupun resin beracun untuk hamster. Kandang
yang dibeli dari toko bisa dilengkapi dengan beberapa tingkat yang dihubungkan dengan
tangga . temperature normal hamster sebesar 18 sampai 26
0C 96 sampai 80
0F)
Lantai yang tinggal hamster biasanya dipenuhi dengan serbuk kayu. Serbuk kayu
dibuat dari kertas yang sudah dibuang atau kayu dengan aroma – aroma adalah yang paling
sehat. Serbuk kayu yang terbuat dengan aroma – aroma adalah yang paling sehat. Serbuk
kayu yang terbuat dari pohon cedar, pinus mengandung fenol yang bisa merusak system
respirasi, hati dan kulit pada hamster.
Hal – hal yang penting dalam memelihara hamster dengan baik [5] :
1.
Membersihkan tempat makan setiap kali makanan diganti
2.
Mengganti serbuk kayu seminggu sekali dan pasir zeolit hamster sehari sekali.
2.2
Mikrokontroler ATMega8535
Mikrokontroler adalah sebuah piranti cerdas yang menjadi tren dalam pengendalian
dan otomatisasi, terutama dikalangan Mahasiswa [1]. Dengan banyaknya jenis tipe,
kapasitas memori, dan berbagai fitur , mikrokontroler menjadi pilihan dalam berbagai
aplikasi prosesor kecil untuk pengendalian skala kecil. Mikrokontroler AVR (Alf and
vegand’s Risc prosessor) dari Atmel menggunakan arsitektur RISC
(Reduced Instruction
Set Computer)
yang artinya prosessor tersebut memiliki set instruksi dasar (Belum tentu
sederhana), sehingga instruksi – instruksi ini biasanya hanya membutuhkan satu siklus
mesin untuk menjalakannya. Instruksi percabangan membutuhkan 2 siklus mesin.
RICS biasanya dirancang dengan arsitektur Harvard, karena arsitektur ini yang
memungkinkan untuk membuat eksekusi instruksi selesai dikerjakan dalam satu atau dua
siklus mesin, sehingga semakin cepat dan handal. Proses downloading program relative
lebih mudah karena dapat dilakukan langsung pada sistemnya.
Sekarang ini, AVR dapat dikelompokkan menjadi enam kelas, yaitu keluarga
ATtiny, Keluarga AT90Sxx, Keluarga ATMega, keluarga AT90CAN, keluarga AT90PWM
dan AT86RFxx. Pengelompokkan kelas – kelas AVR berfungsi untuk membedakan masing
– masing kelas data, peripheral, dan fungsi. Sedangkan dari segi arsitektur dan instruksi
yang digunkan, semua kelas AVR hamper sama. Penulis menggunakan salah satu produk
ATMEL dari keluarga ATMega yaitu ATMega8535
2.2.1
Fitur Yang Dimiliki ATMEGA8535
2.2.1.1
Analog To digital Converter (ADC)
ADC pada ATMega8535 adalah ADC 10 – bit tipe Successive Approximation [1]
Untuk menjaga validasi data terdapat untain sampel and holt . tegangan suplay ADC
terpisah dari tegangan mikrokontroler, tetapi selisihnya tidak boleh lebih dari 0.3 v. untuk
mengatasinya, untai filter LC digunakan seperti ditunjukkan pada gambar 2.1.
ATMEGA8535 terdapat 8 kanal ADC yaitu dengan memberikan masukan tegangan
pada port ADC. Port terletak pada port A.
ATMEGA8535 mempunyai dua mode ADC, yaitu single conversion dan free
running. Pada mode single conversion, pengguna harus mengaktifkan pembacaan ADC
setiap kali ADC akan digunakan. Sedangkan pada mode free running. Pengguna cukup
sekali mengaktifkan pembacaan ADC, maka ADC akan mengkonversi tegangan masukan
secara terus menerus.
ADC ATMEGA8535 terdapat bberapa register I/O yang terlibat dalam proses
konversi, antara lain : ADMUX (ADC Multiplexer Selektion Register) Register ADMUX
berisi bit – bit yang mengatur pilihan kanal (MUX4;0) bit pengatur penyajian data
(ADLAR), dan bit – bit pemilih tegangan referensi (REFSI;0), gambar register ADMUX
dapat dilihat Gambar 2.1.
Proses pengaturan register – register I/O yang terlibat dalam ADC meliputi :
a.
Menentukan sumber tegangan referensi
Referensi pada ADC merupakan batas rentang representasi nilai digital hasil
konversi. Hasil konversi pada mode single ended conversion dirumuskan sebagai
berikut :
V
in. 1.024
ADC = ………(2.1)
V ref
Vin adalah tegangan masukkan analog pada kanal ADC yang aktif dan Vref adalah
tegangan referensi yang dipilih
Bit – bit 4:0 (
Analog Channel and Gain Selection Bit
) pada register ADMUX
menentukan channel ADC yang aktif . table 2.1 menunjukkan konfigurasi bit – bit
tersebut.
c.
Menentukan Prescaler
(Clock ADC)
Prescaler
adalah factor pembagi ADC mikrokontroler. Untuk ketelitian ADC 10 bit.
Rentang frequensi clok yang diperbolehkan adalah 50 Khz sampai 200 Khz.
Ketelitian dibawah 10 bit ADPS2:0 (
ADC Prescaler Select Bits2:0
) menentukan
nilai
prescaler.
Tabel 2.2 menunjukkan konfigurasi bit – bit tersebut.
d.
Inisialisasi ADC
Mikrokontroller mengaktifkan ADC dengan cara memberikan logika “1” pada bit
ADC
Enable
(ADEN) dan memulai ADC dengan cara logika “1” pada bit ADC
Start Conversion
(ADSC). Kedua bit tersebut terletak pada register ADCSRA. Satu
konversi membutuhkan 25 siklus
clock ADC
pada konversi pertama, dan 13 siklus
2.2.1.2
Pulse With Modulation
(PWM)
Mikrokontroler ATMega8535 menyediakan fitur
Timer/Counter 1
sebagai timer,
pencacah
(Counter),
perekam waktu kejadian, pembangkit sinyal PWM
(Pulse Width
Modulation)
, serta
autoreload timer (Clear Timer on Compare / CTC)
[1].
Timer / Counter
1
dengan lebar 16 bit berguna leluasa dalam berbagai tujuan yang berkaitan dengan w3aktu
dan pembangkit gelombang.
a.
OCR1AH/L (Output Compare Register 1 A High-byte/ low-byte) dan OCR1BH/L
(Output Compare register 1 B High-byte/Low-byte)
Isi register OCR1AH/L dan register OCR1AH/L membandingkan isi register
TCNT1H/L kemudian hasil perbandingan kedua register membangkitkan
gelombang pada pin OC1A/B. Gambar 2.2 menunjukkan isi register – register
tersebut.
b.
Input capture Register 1 High-byte/Low-byte
(1CR1H/L)
Register TCNT1H/L selalu memperbaharui nilai register 1CR1H/L setiap kali
terjadi kejadian yang terdeteksi. Register ini dapat menentukan nilai puncak (TOP
value) gambar 2.3 menunjukkan isi register 1CR1K/L.
Lebar register data Timer/Counter1 adalah 16 bit, sehingga dapat mencacah nilai
dari 0000 heksa hingga FFFF heksa.
Sebagai catatan, istilah segitiga disini tidak berarti segitiga dalam bidang geomateri,
tetapi sinyal yang meningkat amplitudonya secara berkala sehingga bentuknya menyerupai
segitiga.
Fasilitas PWM memiliki resolusi 8 hingga 10 bit. Mode operasi PWM meliputi Fast
PWM (FPWM),
Phase Correct PWM
(PCPWM), dan
Phase And Frequency Correct PWM
(PFCPWM). Pada Mode fast PWM Timer/Counter 1 mencacah ulang dari nol setiap kali
terjadi limpahan
(overflow).
Segitiga yang terjadi adalah segitiga siku – siku. Sedangkan
pada dua mode yang lain,
Timer/Counter1
akan mencacah turun ketika terjadi limpahan,
sehingga segi tiga berbentuk sama kaki dengan puncak pada nilai TOP. Perbedaan utama
pada mode PCPWM dan PFCPWM adalah waktu pembaruan nilai OCR1A/B. mode
PCPWM memperbarui OCR1A/B saat nilai BOTTOM.
Gambar 2.4 menunjukkan modulasi nilai TCNT1 oleh OCR1A pada mode FPWM.
Perubahan nilai OCR1A menjadi lebih kecil menunjukkan pulsa yang menyempit. Waktu
ON(T
on) yaitu pulsa saat nilai OCR1A lebih besar dari pada nilai TCNTI. Sebaliknya,
waktu OFF (T
off) yaitu ketika nilai ORC1A lebih kecil dari pada nilai TCNTI.
Duty cycle
adalah perbandingan t
onterhadap Periode PWM. Nilainya Maksimal
duty cycle
adalah
Dalam mengakses PWM, terdapat proses pengaturan register – register I/O yang
terlihat. Proses pengaturan tersebut meliputi :
a.
Menentukan sumber dan frekuensi
clock
yang digunakan
Timer/Counter1
Frekuensi getar
Timer/Counter 1
dapat menggunakan osilator
mikrokontroler dengan factor pembagi atau dapat juga menggunakan pin T1 untuk
sumber
clock
eksternal. Penentuan sumber dank frekuensi
clock
internal menggunakan
bit – bit CS 12;0
(Clock Select)
pada register TCCR1B. table 2.3 menunjukkan pilihan
frekuensi yang tersedia.
b.
Menentukan nilai OCR1A/B sebagai pemodulasi
Untuk memperoleh duty cycle yang diinginkan terlebih dahulu harus menentukan nilai
OCR1A/B. dalam mode non-inverting, semakin besar nilai OCR1A/B maka semakin
besar lebar waktu nyala ( T on), sehingga semakin besar duty cycle. Dan sebaliknya.
Sebagai contoh, untuk memperoleh duty cycle sebesar 50%, maka ORC1A/B diisi
dengan nilai setengah dari nilai maksimum Timer/Counter1.
Pengguna dapat menentukan nilai OCR1A/B dengan memasukkan langsung nilai yang
diinginkan ke dalam register terebut, karena register OCR1A/B mempunyai
kemampuan operasi tulis (Write)
c.
Menentukan nilai prescaler
Nilai Prescaler merupakan pembagi langsung frekuensi system. Persamaan (2.2)
menunjukkan perhitungan untuk menentukan frekuensi PWM mode FPWM
2.2.2 Konfigurasi Pin
2.2.2
Timer ATMega8535
AVR ATMega8535 memiliki 3 buah
timer,
yaitu
Timer/Counter0
(8 bit),
Timer/Counter 1
(16), dan
Timer /Counter2
(8bit)[1].
2.2.3.1
Timer/Counter0
Timer/Counter0
adalah
timer /Counter
8 bit yang multifungsi. Fitur-fitur dari
Timer/Counter0
pada ATMega8535 adalah sebagai berikut
a.
Counter 1 kanal
b.
Timer dinolkan saat proses pembanding tercapai
(Compare Math)
c.
Sebagai pembangkit gelombang PWM
d.
Sebagai pembangkit frekuensi
e.
Clock prescaller
10 bit
f.
Sumber interupsi dari
compare match
(OCFO) dan
oferlow
(TOV0).
2.2.3.2
Timer/Counter1
Timer/Counter 1 adalah Timer/Counter 16 bit yang memungkinkan program
pewaktu lebih akurat . Fitur – fitur dari Timer/Counter 1 ini adalah sebagai berikut :
a.
Desain 16 bit, sehingga memungkinkan untuk menghasilkan PWM 16 bit.
b.
Dua buah unit pembanding
c.
Dua buah register pembanding
d.
Satu buah input capture unit
e.
Timer di-nol-kan saat proses pembanding tercapai (Match compare)
f.
Dapat menghasilkan gelombang PWM
g.
Periode PWM yang dapat diubah – ubah
h.
Sebagai pembangkit frekuensi
i.
Empat buah sumber interupsi (TOV1, OCF1A, OCF1B, dan ICF1)
2.2.3.3
Timer /Counter2
Timer/Counter2
adalah
timer/Counter
8 bit yang fungsi. Fitur – fitur untuk
b.
Timer di-nol-kan saat proses pembandingan tercapai
(Match compare)
c.
Dapat menghasilkan gelombang PWM
d.
Sebagai pembangkit frekuensi
e.
Clock prescaler 10 bit
f.
Sumber interupsi dari compare match (OCF0) dan overflow (TOV0).
Untuk memilih sumber clock yang akan digunakan oleh Timer/Counter2 dengan
mengatur Bit2,1,0-CS22,CS21, CS20 : Clock Select
Pengaturan dari bit – bit pemilih sumber clock terlihat pada Tabel 2.5
2.4
Saklar batas (Limit Switch)
Saklar batas atau limit switch merupakan salah satu jenis switch berfungsi untuk
menghubungkan dan memutuskan arus[6]. Sifat dari limit ini normally close) yaitu
menekan switch akan menghubungkan arus dan sebaliknya.
Terminal NO merupakan terminal yang pada kondisi normal berupa kontak terputus
atau tidak tersambung dengan COM sedangkan terminal NC berupa kontak pada kondisi
normal tersambung COM. Saat arus terputus atau tersambung dapat menyebabkan percikan
api. Untuk itu setiap titik sambungan titik switch terbuat dari bahan yang tahan percikan
2.5
IC Driver L293 D
IC ini merupakan IC bertegangan tinggi, keempat saluran driver berarus tinggi
dirancang untuk level logika TTL, dan mendrive beban induktif (seperti relay ) dan
switching transistor daya [7]
Setiap pasang saluran mempunyai fasilitas masukan enable yang berfungsi untuk
memudahkan penggunaan. IC ini sudah terdapat diode pengaman yang terdiri dari 4 buah.
Masukan Supply terpisah agar mudah dalam penggunaan untuk bekerja pada tegangan yang
rendah. Gambar 2.7 merupakan gambar blok diagram dan pin connetions dari IC L293D.
2.6
LCD (Liquid Crystal Display)
2.6.1
Gambaran Umum
Banyak sekali kegunaan LCD dalam perancangan suatu system yang menggunakan
Mikrokontroller[8]. LCD adalah komponen yang berfungsi untuk menampilkan suatu
karakter pada suatu tampilan dengan bahan utama berupa
liquid crystal.
LCD yang sering digunakan adalah jenis LCD M1632. M1632 merupakan modul
LCD dengan tampilan 2 x 16 ( baris, 16 kolom) dengan komsumsi daya yang rendah.
Untuk membatasi arus yang masuk ke dalam LCD maka dibutuhkan sebuah hambatan.
Nilai hambatan dapat dihitung dengan menggunakan persamaan (2.3)
Dimana V adalah tegangan catu daya yang digunakan LCD dan I adalah arus
LCD bertipe Mi632 memungkinkan program untuk mengoperasikan komunikasi
data secara 8 bit atau 4 bit. Jika menggunkanan jalur data 4 bit, maka akan ada 7 jalur data
(3 untuk jalur control dan 4 bit untuk jalur data). Jika menggunakan jalur data 8 bit, maka
aka nada 11 jalur data (3 untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur control ke
LCD ini adalah EN (Enable), RS (Register Slecet) dan R/W (read/Write). Gambar 2.8
adalah contoh LCD (2 x 16) yang digunakan. Tabel 2.6 menunjukkan fungsi dan
2.7
Termoelektrik
Teknologi termoelektrik (efek seeback) bekerja dengan mengkonversi energy panas
menjadi listrik secara langsung
(Generator Termoelektrik)
atau sebaliknya
(efek Peltier)
[10]. Material termoelektrik cukup terletak pada rangkaian yang menghubungkan sumber
panas dan dingin untuk menghasilkan arus listrik
Sebuah material yang memiliki sifat termoelektrik yang baik harus merupakan
konduktor listrik yang baik dan konduktor panas yang buruk. Karena silicon memiliki sifat
konduksi yang baik untuk listrik dan panas yang buruk, bahan termoelektrik dapat
menggunakan material silicon.
2.8
Operational Amplifier (Op-Amp)
Op-Amp merupakan salah satu komponen analog yang popular digunakan dalam
berbagai aplikasi rangkaian elektronika [11]. Aplikasi Op-Amp yang paling utama antara
lain rangkaian
Inverter, Non –Inverter integrator dan Differentiator
. Rangkaian umpan
balik negative memegang peranan penting. Secara umum, umpang balik positip akan
menghasilkan osilasi sedangkan umpan balik menghasilkan penguatan yang dapat terukur
2.8.1.
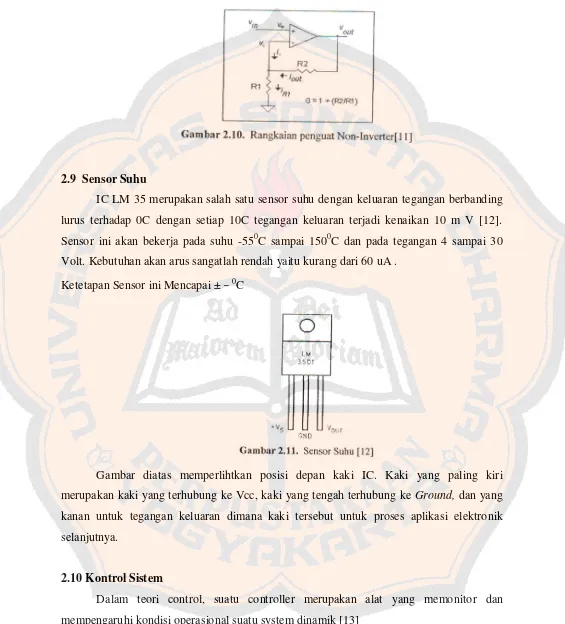
Non-Inverting Amplifier
Penguat Non-Inverting memiliki masukan melalui masukan
Non-Inverting
. Dengan
demikian tegangan keluaran rangkaian ini akan satu fasa dengan tegangan masukannya.
Rumus dibawah menunjukkan hubungan antara tegangan keluaran terhadap tegangan
2.9
Sensor Suhu
IC LM 35 merupakan salah satu sensor suhu dengan keluaran tegangan berbanding
lurus terhadap 0C dengan setiap 10C tegangan keluaran terjadi kenaikan 10 m V [12].
Sensor ini akan bekerja pada suhu -55
0C sampai 150
0C dan pada tegangan 4 sampai 30
Volt. Kebutuhan akan arus sangatlah rendah yaitu kurang dari 60 uA .
Ketetapan Sensor ini Mencapai ±
0C
Gambar diatas memperlihtkan posisi depan kaki IC. Kaki yang paling kiri
merupakan kaki yang terhubung ke Vcc, kaki yang tengah terhubung ke
Ground,
dan yang
kanan untuk tegangan keluaran dimana kaki tersebut untuk proses aplikasi elektronik
selanjutnya.
2.10
Kontrol Sistem
Dalam teori control, suatu controller merupakan alat yang memonitor dan
1.
Kontroler Proporsional-Integral (PI)
Kontroler ini merupkan penjumlahan antara kontroler proporsional dengan kontroler
integral, kontroler integral merupakan kontroler yang menjumlahkan setiap
kesalahan yang terjadi setiap saat.
2.
Kontroler Proporsional-Derivatif (PD)
Kontroler ini merupakan penjumlahan antara kontroler proporsional dengan
kontroler differensial, kontroler differensial merupakan kontroler hasil selisih
kesalahan yang terjadi saat ini dengan kesalahan yang terjadi sebelumnya.
3.
Kontroler Proporsional-Integral-Derivatif (PID)
Kontroler ini merupakan gabungan antara kontroler proporsional, integral, dan
differensial. Kontroler ini merupakan kontroler yang kompleks.
Karakteristik PID :
1.
Kp : Mengurangi
rise time
, tetapi tidak menghilangkan
steady-steate error
(SSE)
2.
Ki : Menghilangkan SSE, tetapi membuat transient respone lebih buruk
3.
Kd : Meningkatkan stabilitas system, mengurangi
overshot
dan meningkatkan
transient respone
Suatu system tidak harus menerapkan semua tipe kontroler, penerapan tipe kontroler
tergantung pada kebutuhan system. System yang tidak memerlukan Kd biasanya adalah
system yang jalan berlambat lambat (misalnya suhu)
Pseudocode
di baah menerapkan system PID pada program dalam mikrokontroler,
keluaran dari
pseudocode
dibawah haruslah mempunyai keluaran digital, yaitu dengan cara
Previous_error=0
Integral=0
Start:
Error=setpoint-actual-position
Integral=integral+(errorx ki)
Derivative=(error-previous_error)/kp
Output=(kp x error) + (ki x integral) + (kd x derivative)
Previous_error=error
Wait(dt)
Goto start
Keluaran
integral
dapat juga dengan cara menjumlahkan kesalahan – kesalahan
penguat beda sebelumnya, seperti rumus di bawah [14]
V(n) = V(n-1) + A1 x E(n) + A2 x E(n-1) + A3 x E(n-2)
(2.4)
Cara mengatur kontroler PID yang penting popular terdiri dari :
1.
Model matematika
plant/system
2.
Ziegler-Nichols
metode 1 dan 2
Metode
Ziegler – Nichols
dilakukan berdasarkan eksperimen, dengan memberikan
masukan step pada system, dan mengamati hasilnya. Prosedur praktis menggunakan
metode ini adalah :
1.
Berikan masukan step pada system
2.
Dapatkan grafik
3.
Tentukan nilai L dan T
2.11
Kapasitor
Kapasitor adalah komponen elektronika yang dapat menyimpan muatan listrik [18].
Struktur kapasitor terbuat dari dua buah plat metal yang dipisahkan oleh suatu bahan
dielektrik. Kapasitor digunakan pada perancangan untuk menghilangkan tegangan ripple,
BAB III
RANCANGAN PENELITIAN
3.1 Pra Penelitian
Dari penelitian terhadap kehidupan hamster didapat beberapa data sebagai berikut: 1. Hamster merupakan binatang pengerat, sehingga rangka alat yang dibuat
menggunakan akrelik dan aluminium agar kandang lebih tahan dari gigitan hamster. Hamster juga diberi serbuk kayu untuk digigit karena hewan pengerat terbiasa dengan menggigit sesuatu.
2. Hamster memiliki kebiasaan unik yaitu selalu buang air disatu tempat dan pasir zeolit lebih disukai hamster sebagai tempat buang air. Pasir zeolit dirancang sebagai toilet hamster.
Dari beberapa buku – buku dan jurnal – jurnal didapat data sebagai berikut:
1. Hamster tidak tahan angin, untuk menjaga kondisi ini maka sisi kandang atas tempat suhu beredar akan dilapisi jala – jala nyamuk secara horizontal[3].
2. Hamster merupakan binatang rentan air, untuk itu kandang diusahakan sekering mungkin dengan cara mengganti serbuk kayu dan pasir zeolit secara berkala agar tidak terjadi pelembaban yang dapat mengakibatkan hamster tersebut basah oleh keringat dan air seni hamster sendiri. Alternatif pengatur suhu yang digunakan adalah termolektrik, hal ini dikarenakan termoelektrik tidak mengeluarkan sisa sampingan berupa air[4].
3. Hamster mempunyai habitat asli dengan suhu berkisar antara 18oC sampai 25oC. Untuk itu suhu diatur agar berada dalam kisaran tersebut. Batas atas dan batas bawah suhu diberi toleransi 1oC agar tidak mencapai batas ambang tersebut pada saat terjadi suatu perubahan suhu yang mendadak. Pengatur suhu dirancang agar dapat mengatur suhu dalam kisaran 19oC sampai 24oC dengan setpoint 22oC
4. Gigi hewan pengerat tidak pernah berhenti tumbuh. Oleh sebab itu hamster harus menggigit sesuatu yang keras terus menerus. Hamster diberi serbuk kayu untuk kasus ini.
5. Pergantian serbuk kayu seminggu sekali dan pasir zeolit sehari sekali. Rancangan kandang menggunakan timer yang telah disediakan oleh mikrokontroler untuk mengotomatisasi perggantian ini sehingga lebih teratur dibandingkan dikerjakan secara manual.
Setelah meneliti cara hidup hamster, maka penulis membutuhkan hal – hal sebagai berikut untuk merancang kandang yang sesuai dengan cara hidup hamster:
1. Pembuatan sistem serbuk kayu membutuhkan bahan sebagai berikut:
a. Driver motor serbuk kayu
b. Motor penggerak alas permukaan serbuk kayu c. Motor pengisian serbuk kayu
d. Limit switch penutup alas serbuk kayu
e. Limit switch pengisian serbuk kayu
2. Pembuatan sistem pasir zeolit membutuhkan bahan sebagai berikut:
a. Driver motor pasir zeolit
b. Motor penggerak alas permukaan pasir zeolit c. Motor pengisian pasir zeolit
d. Limit switch penutup alas pasir zeolit
e. Limit switch pengisian pasir zeolit
3. Pembuatan sistem pengaturan suhu membutuhkan bahan sebagai berikut: a. Termoelektrik
b. LCD
c. Sensor LM 35
d. Pemutar balik arah arus listrik
e. Driver termolektrik
4. Perancangan kandang sehat hamster menggunakan fasilitas timer dan ADC dalam mikrokontroler.
5. Pembuatan kandang hamster, hal pertama dalam pembuatan kandang yaitu menentukan sketsa gambar rancangan kandang hamster. Penulis menggunakan bahan akrelik dalam pembuatan kandang hamster.
6. Regulator dengan daya yang besar
3.
2 Sistem Pasir Zeolit
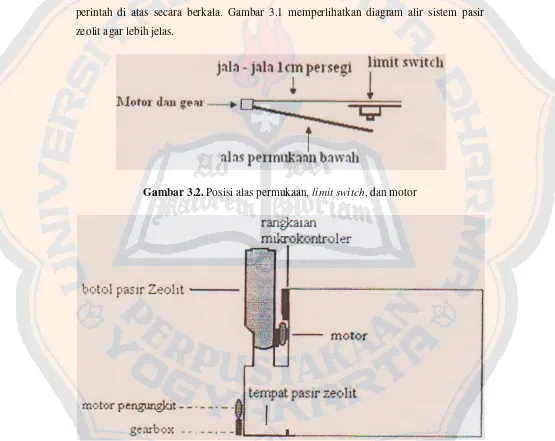
dan pasir zeolit akan jatuh ke bawah. Untuk menghindari hamster jatuh bersama pasir zeolit, maka penulis membentangkan jala – jala 1cm2 di atas permukaan alas pasir zeolit.
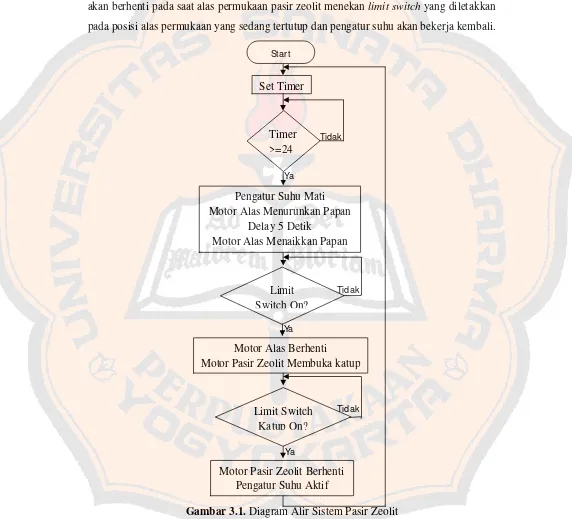
Penulis memperkirakan pembuangan pasir zeolit akan berlangsung selama 5 detik. Motor akan bergerak berlawan arah untuk menutup alas permukaan pasir zeolit. Motor akan berhenti pada saat alas permukaan pasir zeolit menekan limit switch yang diletakkan pada posisi alas permukaan yang sedang tertutup dan pengatur suhu akan bekerja kembali.
Gambar 3.1. Diagram Alir Sistem Pasir Zeolit St art
Set Timer
Timer >=24
Motor Alas Berhenti Motor Pasir Zeolit Membuka katup
Limit Switch Katup On?
Motor Pasir Zeolit Berhenti Pengatur Suhu Aktif
Limit Switch On? Pengatur Suhu Mati Motor Alas Menurunkan Papan
Delay 5 Detik
Motor Alas Menaikkan Papan Ya
Tidak
Ya
Ya
Tidak
Setelah alas permukaan pasir zeolit tertutup, maka mikrokontroler akan menggerakkan motor pasir zeolit untuk membuka katup botol pasir zeolit yang masih baru dan pasir zeolit yang baru akan jatuh selama sepuluh detik.
Setelah sepuluh detik maka mikrokontroler akan kembali menggerakkan motor pasir zeolit sampai limit switch pasir zeolit yang diletakkan pada posisi katup semula tertekan untuk menutup katup botol pasir zeolit. Mikrokontroler akan kembali mereset ulang timer menjadi nol dan kembali mencacah selama 24 jam dan melakukan perintah – perintah di atas secara berkala. Gambar 3.1 memperlihatkan diagram alir sistem pasir zeolit agar lebih jelas.
Gambar 3.2. Posisi alas permukaan, limit switch, dan motor
Sistem ini menggunakan masukan berupa trigger dari mikrokontroler ATMEGA 8535 untuk mengaktifkan motor pengisi dan pembuang pasir zeolit. Sistem ini menggunakan rangkaian relay untuk mengendalikan motor pengisi pasir zeolit. Rangkaian yang digunakan pada pengendalian motor pengisi pasir zeolit menggunakan
relay adalah rangkaian latching, pembalik, dan rangkaian pemutus. Rangkaian relay yang
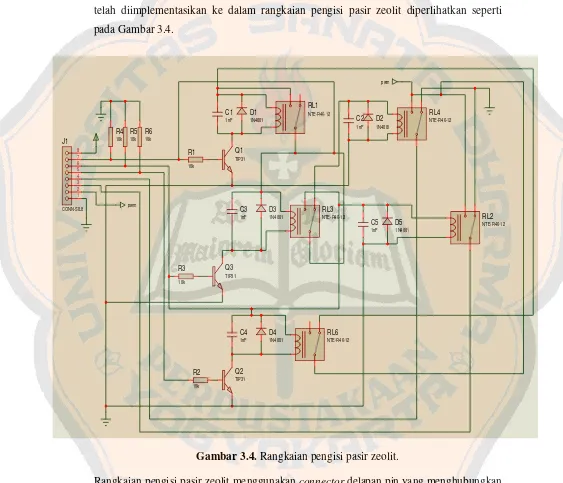
telah diimplementasikan ke dalam rangkaian pengisi pasir zeolit diperlihatkan seperti pada Gambar 3.4.
Gambar 3.4. Rangkaian pengisi pasir zeolit.
Rangkaian pengisi pasir zeolit menggunakan connector delapan pin yang menghubungkan motor, catu dan limit switch dengan konfigurasi sebagai berikut:
1. Pin 1 digunakan untuk ground
3. Pin 3 digunakan untuk masukan motor 4. Pin 4 digunakan untuk masukan motor
5. Pin 5 digunakan untuk limit switch penghenti motor
6. Pin 6 digunakan untuk limit switch pembalik arah putaran motor 7. Pin 7 digunakan untuk masukan dari mikrokontroler berupa trigger
8. Pin 8 digunakan untuk VCC
Cara kerja pada rangkaian pengisi pasir zeolit mempunyai tahap sebagai berikut: 1. Rangkaian mendapatkan trigger (pin 7) dari mikrokontroler ATMEGA8535 selama
10 milidetik.
2. Relay RL1 dengan konfigurasi latching akan aktif pada saat mendapat trigger dari
pin 7 (Mikrokontroler ATMEGA8535) .
3. Ketika Relay RL 1 berada dalam kondisi aktif(latching) Relay RL4 akan menghubungkan salah satu masukan motor ke supply sehingga motor jalan membuka katup. Katup membuka, sehingga pasir zeolit dari botol supply mengalir ke kandang sebesar rata – rata 156 gram.
4. Motor aktif sampai limit switch yang terhubung ke pin 6 aktif. Pada saat pin 6 aktif,
relay RL3 akan aktif dan mengalihkan supply yang menuju ke relay RL4 menjadi
menuju ke relay RL2. Relay RL4 menjadi kehilangan supply sehingga mengalihkan masukan motor (+, pin 4) menuju ground dan relay RL2 mendapatkan supply yang menghubungkan masukan motor (-, pin 3) yang lain. Dengan kondisi pin4 off dan pin3 on, motor mengubah arah ke arah yang berlawanan sehingga menutup katup. Kondisi katup yang menutup mengakibatkan terhentinya pendistribusian dari botol
supply menuju kandang.
Resistor yang dipasang pada rangkaian berguna untuk memberi nilai tegangan 0V
(pull down) pada pin basis transistor ketika tidak diberi masukan high, hal ini untuk
mencegah keadaan ambang. Dalam perancangan, nilai arus yang masuk ke kaki basis transistor ditentukan yaitu sebesar 0.5mA (Berdasarkan datasheet, arus yang mengalir pada kaki basis transistor maksimum = 375 mA), dengan demikian nilai R1, R2, R3, R4, R5, dan R6 dapat dihitung dengan menggunakan persamaan (2.3) sebagai berikut:
R =
R = .
Kapasitor yang dipasang pada setiap relay berguna untuk menghilangkan ripple
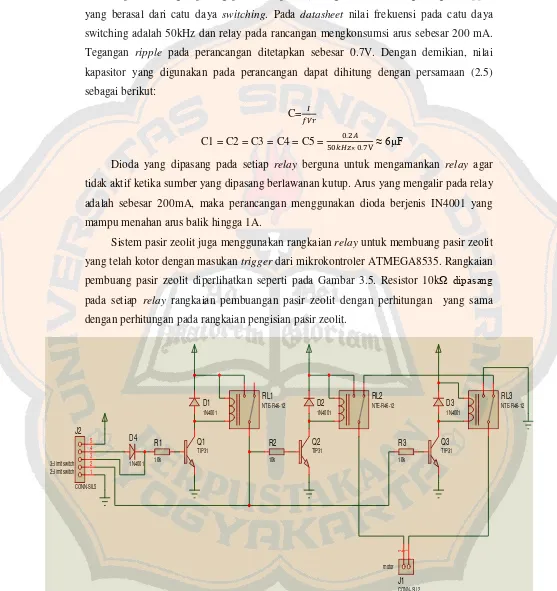
yang berasal dari catu daya switching. Pada datasheet nilai frekuensi pada catu daya switching adalah 50kHz dan relay pada rancangan mengkonsumsi arus sebesar 200 mA. Tegangan ripple pada perancangan ditetapkan sebesar 0.7V. Dengan demikian, nilai kapasitor yang digunakan pada perancangan dapat dihitung dengan persamaan (2.5) sebagai berikut:
C=
C1 = C2 = C3 = C4 = C5 = .
× . ≈ 6µF
Dioda yang dipasang pada setiap relay berguna untuk mengamankan relay agar tidak aktif ketika sumber yang dipasang berlawanan kutup. Arus yang mengalir pada relay adalah sebesar 200mA, maka perancangan menggunakan dioda berjenis IN4001 yang mampu menahan arus balik hingga 1A.
Sistem pasir zeolit juga menggunakan rangkaian relay untuk membuang pasir zeolit yang telah kotor dengan masukan trigger dari mikrokontroler ATMEGA8535. Rangkaian pembuang pasir zeolit diperlihatkan seperti pada Gambar 3.5. Resistor 10kΩ dipasang pada setiap relay rangkaian pembuangan pasir zeolit dengan perhitungan yang sama dengan perhitungan pada rangkaian pengisian pasir zeolit.
Gambar 3.5. Rangkaian pembuang pasir zeolit yang telah kotor.
Konfigurasi connector lima pin yang digunakan pada rangkaian pembuang pasir zeolit adalah sebagai berikut:
1. Pin 1 digunakan untuk supply ground pada rangkaian 2. Pin 2 digunakan untuk limit switch (NC)pemutus arus 3. Pin 3 digunakan untuk limit switch (NC) pemutus arus 4. Pin 4 digunakan untuk trigger dari mikrokontroler 5. Pin 5 digunakan untuk supply VCC pada rangkaian
Cara kerja pada rangkaian pembuang pasir zeolit mempunyai tahap – tahap sebagai berikut:
1. Pin 4 mendapatkan trigger dari mikrokontroler dilanjutkan ke transistor dengan konfigurasi sebagai saklar, pada saat transistor mengalirkan arus dari kolektor ke emitor, tegangan pada kolektor akan menurun sehingga mengaktifkan relay RL1. 2. Pada saat relay RL1 aktif, VCC akan terhubung ke pin common relay. Arus
kemudian mengalir dari common relay menuju ke pin 2, dan melewati limit switch. Arus dari limit switch mengalir ke pin 3 yang terhubung ke basis transistor. Hal ini mengakibatkan relay RL1 akan terus hidup (latching) saat diberi trigger dari mikrokontroler ATMEGA8535.
3. Arus dari pin common relay juga mengalir ke dua transistor lainnya dan mengakibatkan relay RL2 dan relay RL3 aktif. Pada saat relay RL2 aktif maka arus pada catudaya VCC mengalir ke pin motor (+) dan pada saat relay RL3 aktif maka pin motor (-) terhubung ke ground. Dengan kondisi demikian, motor akan aktif. 4. Motor akan membuka alas pasir zeolit dan kemudian menutup alas sesuai dengan
putaran motor. Pada saat motormenutup alas pasir zeolit, alas menekan limit switch
NC yang dipasang pada kondisi alas tertutup. Limit switch NC yang aktif akan memutuskan hubungan arus listrik ke relay RL1, hal ini mengakibatkan terputusnya
supply arus menuju relay RL2 dan relay RL3. Motor kemudian berhenti setelah
supply arus motor yang berasal dari relay RL2 dan relay RL3 mati.
Program timer dibutuhkan untuk membuat program pada sistem pasir zeolit, sebagai berikut:
'---interupsi Timer 1 Const Timerstart = 65536 - 1000
Milidetik = Milidetik + 1 If Milidetik = 3600000 Then Jam = Jam + 1
Milidetik = 0 End If
If Jam = 24 Then Hari = Hari + 1 Jam = 0
End If
If Hari = 7 Then Minggu = 1 Hari = 0 End If
Return
Dengan menggunakan crystal sebesar 8 MHz, setiap instruksi pada program akan berjalan setiap 0.125 mikro detik. Timer menggunakan prescaler 8, yang artinya frekuensi yang digunakan oleh timer adalah seperdelapan dari frekuensi crystal yaitu sebesar 1MHz. Dengan frekuensi sebesar 1MHz, satu cacahan terjadi dalam satu mikro detik. Setiap overflow akan menghasilkan 1 mili detik. Kemudian dijumlah hingga mendapatkan 1 jam, 1 hari, dan 1 minggu. Untuk ketepatan timer dalam mencacah, pada saat mengisi program ke IC diberi pengaturan fuse & bit.
Berdasarkan diagram alir sistem pasir zeolit yang diperlihatkan pada Gambar 3.1
maka program yang digunakan pada sistem pasir zeolit adalah sebagai berikut:
If Pasiraktif <> Hari Then Call Pasir
Pasiraktif = Hari End If
Program di atas merupakan program utama dari sistem pasir zeolit, yang memanggil sub program pasir, dan kemudian menunggu hari berikutnya untuk aktif kembali. Pasir aktif sama dengan hari digunakan agar tidak terjadi pengisian berulang – ulang dalam satu hari.
Pembuka Pasir = 1 Waitms 10
Pembuka Pasir = 0 Waitms 1000 Pengisi Pasir = 1 Waitms 10 Pengisi Pasir = 0 End Sub
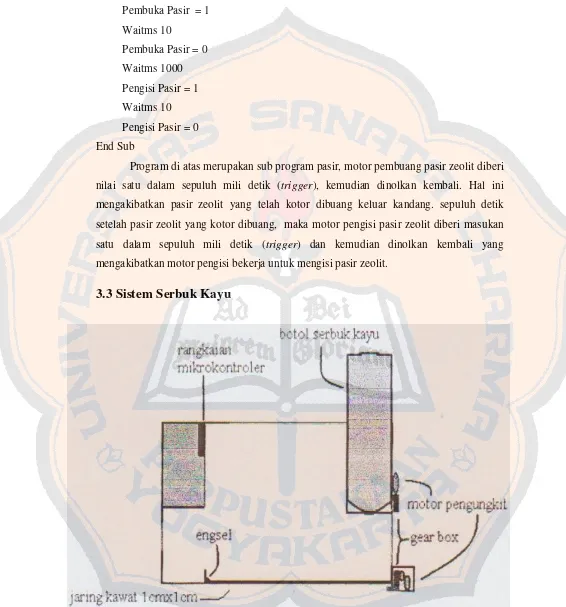
Program di atas merupakan sub program pasir, motor pembuang pasir zeolit diberi nilai satu dalam sepuluh mili detik (trigger), kemudian dinolkan kembali. Hal ini mengakibatkan pasir zeolit yang telah kotor dibuang keluar kandang. sepuluh detik setelah pasir zeolit yang kotor dibuang, maka motor pengisi pasir zeolit diberi masukan satu dalam sepuluh mili detik (trigger) dan kemudian dinolkan kembali yang mengakibatkan motor pengisi bekerja untuk mengisi pasir zeolit.
3.3 Sistem Serbuk Kayu
Dalam perancangan kandang sehat hamster, sistem pengisian ulang serbuk kayu yang akan dirancang tidak jauh berbeda dengan sistem pengisian ulang pasir zeolit. Perbedaan antara kedua sistem tersebut adalah pada sistem serbuk pengaturan timer
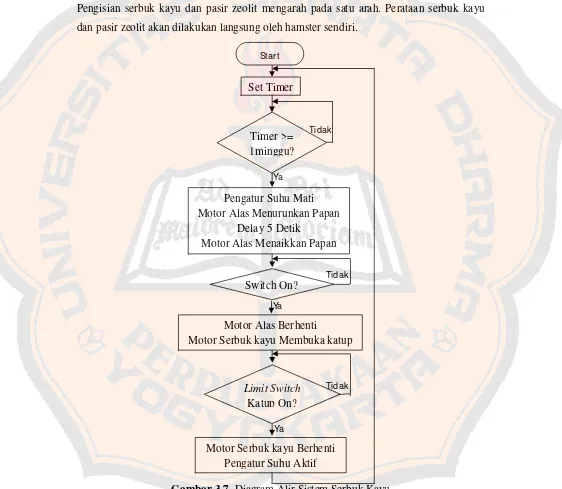
selama satu minggu untuk pengisian ulang dan sistem ini menggunakan motor dengan torsi yang kuar agar dapat menaikkan alas permukaan serbuk kayu ke atas dikarenakan dimensi alas sistem serbuk kayu yang lebih besar dari pada permukaan alas pasir zeolit. Pengisian serbuk kayu dan pasir zeolit mengarah pada satu arah. Perataan serbuk kayu dan pasir zeolit akan dilakukan langsung oleh hamster sendiri.
Gambar 3.7. Diagram Alir Sistem Serbuk Kayu St art
Set Timer
Timer >= 1minggu?
Motor Alas Berhenti
Motor Serbuk kayu Membuka katup
Limit Switch
Katup On?
Motor Serbuk kayu Berhenti Pengatur Suhu Aktif
Switch On? Pengatur Suhu Mati Motor Alas Menurunkan Papan
Delay 5 Detik
Motor Alas Menaikkan Papan Ya
Tidak
Ya
Ya
Tidak
Sistem serbuk kayu menggunakan masukan berupa trigger dari mikrokontroler ATMEGA 8535 untuk mengaktifkan rangkaian pengisi dan pembuang serbuk kayu. Sistem serbuk kayu menggunakan rangkaian relay untuk mengendalikan motor pengisi serbuk kayu. Rangkaian yang digunakan pada pengendalian motor pengisi serbuk kayu menggunakan relay adalah rangkaian latching, pembalik, dan rangkaian pemutus. Rangkaian relay yang telah diimplementasikan ke dalam rangkaian pengisi serbuk kayu dapat diperlihatkan seperti pada Gambar 3.8.
Gambar 3.8. Rangkaian pengisi serbuk kayu.
Rangkaian pengisi serbuk kayu menggunakan connector delapan pin yang menghubungkan motor, catu dan limit switch dengan konfigurasi sebagai berikut:
1. Pin 1 digunakan untuk ground
2. Pin 2 digunakan untuk PWM sebagai catu untuk motor 3. Pin 3 digunakan untuk masukan motor
4. Pin 4 digunakan untuk masukan motor
5. Pin 5 digunakan untuk limit switch penghenti motor
6. Pin 6 digunakan untuk limit switch pembalik arah putaran motor 7. Pin 7 digunakan untuk masukan dari mikrokontroler berupa trigger
8. Pin 8 digunakan untuk VCC
Cara kerja pada rangkaian pengisi serbuk kayu mempunyai tahap – tahap sebagai berikut:
1. Rangkaian mendapatkan trigger (pin 7) dari mikrokontroler ATMEGA8535 selama 10 milidetik.
2. Relay RL1 dengan konfigurasi latching akan aktif pada saat mendapat trigger dari
pin 7 (Mikrokontroler ATMEGA8535) .
3. Ketika Relay RL 1 berada dalam kondisi aktif(latching) Relay RL4 akan menghubungkan salah satu masukan motor ke PWM sehingga motor jalan membuka katup. Katup membuka, sehingga serbuk kayu dari botol supply mengalir ke kandang sebesar rata – rata 98.28 gram.
4. Motor aktif sampai limit switch yang terhubung ke pin 6 aktif. Pada saat pin 6 aktif,
relay RL3 akan aktif kemudian mengalihkan supply yang menuju ke relay RL4
menjadi menuju ke relay RL2. Relay RL4 menjadi kehilangan supply sehingga mengalihkan masukan motor (+, pin 4) menuju ground dan relay RL2 mendapatkan
supply yang menghubungkan masukan motor (-, pin 3) yang lain. Dengan kondisi
pin 4 off dan pin3 on, motor mengubah arah ke arah yang berlawanan sehingga menutup katup. Kondisi katup yang menutup mengakibatkan terhentinya pendistribusian dari botol supply menuju kandang.
Resistor yang dipasang pada rangkaian berguna untuk memberi nilai tegangan 0V
(pull down) pada pin basis transistor ketika tidak diberi masukan high, hal ini untuk
pada kaki basis transistor maksimum = 375 mA), dengan demikian nilai R1, R2, R3, R4, R5, dan R6 dapat dihitung dengan menggunakan persamaan (2.3) sebagai berikut:
R =
R1 = R2 = R3 = R4 = R5 = R6 =
. = 10000 Ω
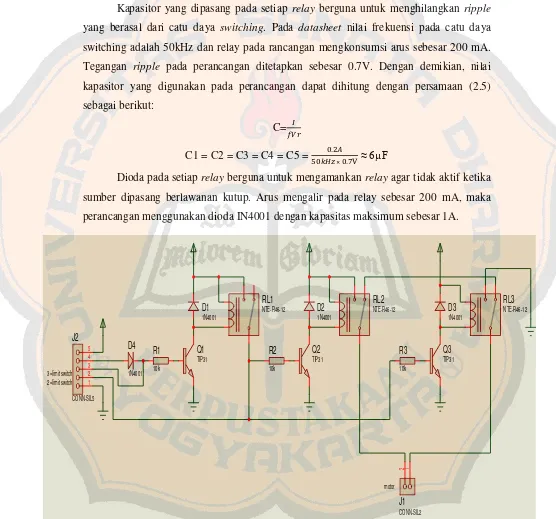
Kapasitor yang dipasang pada setiap relay berguna untuk menghilangkan ripple
yang berasal dari catu daya switching. Pada datasheet nilai frekuensi pada catu daya switching adalah 50kHz dan relay pada rancangan mengkonsumsi arus sebesar 200 mA. Tegangan ripple pada perancangan ditetapkan sebesar 0.7V. Dengan demikian, nilai kapasitor yang digunakan pada perancangan dapat dihitung dengan persamaan (2.5) sebagai berikut:
C=
C1 = C2 = C3 = C4 = C5 = .
× . ≈ 6µF
Dioda pada setiap relay berguna untuk mengamankan relay agar tidak aktif ketika sumber dipasang berlawanan kutup. Arus mengalir pada relay sebesar 200 mA, maka perancangan menggunakan dioda IN4001 dengan kapasitas maksimum sebesar 1A.
Rangkaian pembuang serbuk kayu menggunakan rangkaian latching dan pemutus
(start and stop). Rangkaian pembuang serbuk kayu menggunakan connector lima pin
yang digunakan untuk menghubungkan motor, catu dan limit switch. Rangkaian pembuang serbuk kayu diperlihatkan seperti pada Gambar 3.9. Resistor 10kΩ dipasang pada setiap relay rangkaian pembuangan serbuk kayu dengan perhitungan yang sama dengan perhitungan pada rangkaian pengisian serbuk kayu.
Konfigurasi connector lima pin yang digunakan pada rangkaian pembuang serbuk kayu adalah sebagai berikut:
1. Pin 1 digunakan untuk supply ground pada rangkaian 2. Pin 2 digunakan untuk limit switch (NC)pemutus arus 3. Pin 3 digunakan untuk limit switch (NC) pemutus arus 4. Pin 4 digunakan untuk trigger dari mikrokontroler 5. Pin 5 digunakan untuk supply VCC pada rangkaian
Cara kerja pada rangkaian pembuang serbuk kayu mempunyai tahap – tahap sebagai berikut:
1. Pin 4 mendapatkan trigger dari mikrokontroler dilanjutkan ke transistor dengan konfigurasi sebagai saklar, pada saat transistor mengalirkan arus dari kolektor ke emitor, tegangan pada kolektor akan menurun sehingga mengaktifkan relay RL1. 2. Pada saat relay RL1 aktif, VCC akan terhubung ke pin common relay. Arus
kemudian mengalir dari common relay menuju ke pin 2, dan melewati limit switch. Arus dari limit switch mengalir ke pin 3 yang terhubung ke basis transistor. Hal ini mengakibatkan relay RL1 akan terus hidup (latching) saat diberi trigger dari mikrokontroler ATMEGA8535.
3. Arus dari pin common relay juga mengalir ke dua transistor lainnya dan mengakibatkan relay RL2 dan relay RL3 aktif. Pada saat relay RL2 aktif, maka arus pada catudaya VCC mengalir ke pin motor (+) dan pada saat relay RL3 aktif maka pin motor (-) terhubung ke ground. Dengan kondisi demikian, motor akan aktif. 4. Motor akan membuka alas serbuk kayu dan kemudian menutup alas sesuai dengan
putaran motor. Pada saat motormenutup alas serbuk kayu,alas menekan limit switch
supply arus menuju relay RL2 dan relay RL3. Motor kemudian berhenti setelah
supply arus motor yang berasal dari relay RL2 dan relay RL3 mati.
Program timer dibutuhkan untuk membuat program pada sistem serbuk kayu, sebagai berikut:
'---interupsi Timer 1 Const Timerstart = 65536 - 1000
Timer_1_int:
Milidetik = Milidetik + 1 If Milidetik = 3600000 Then Jam = Jam + 1
Milidetik = 0 End If
If Jam = 24 Then Hari = Hari + 1 Jam = 0
End If
If Hari = 7 Then Minggu = 1 Hari = 0 End If
Return
Dengan menggunakan crystal sebesar 8 MHz, setiap instruksi pada program akan berjalan setiap 0.125 mikro detik. Timer menggunakan prescaler 8, yang artinya frekuensi yang digunakan oleh timer adalah seperdelapan dari frekuensi crystal yaitu sebesar 1MHz. Dengan frekuensi sebesar 1MHz, satu cacahan terjadi dalam satu mikro detik. Setiap overflow akan menghasilkan 1 mili detik. Kemudian dijumlah hingga mendapatkan 1 jam, 1 hari, dan 1 minggu. Untuk ketepatan timer dalam mencacah, pada saat mengisi program ke IC diberi pengaturan fuse & bit.
Berdasarkan diagram alir sistem serbuk kayu yang diperlihatkan pada Gambar 3.7
maka program yang digunakan pada sistem serbuk kayu adalah sebagai berikut:
Call Serbuk Minggu = 0 End If
Program diatas merupakan program utama dari sistem serbuk kayu, yang memanggil sub program serbuk, dan kemudian kembali mencacah selama satu minggu. Kemudian terjadi pencacahan timer kembali.
Sub Serbuk()
Pembukaserbuk = 1 Waitms 10
Pembukaserbuk = 0 Waitms 1000 Pengisiserbuk = 1 Waitms 10 Pengisiserbuk = 0 End Sub
Program di atas merupakan sub program serbuk, motor pembuang serbuk kayu diberi nilai satu dalam sepuluh mili detik (trigger), kemudian dinolkan kembali. Hal ini mengakibatkan serbuk kayu yang telah kotor dibuang keluar kandang. sepuluh detik setelah serbuk kayu yang kotor dibuang, maka motor pengisi serbuk kayu diberi masukan satu dalam sepuluh mili detik (trigger) dan kemudian dinolkan kembali yang mengakibatkan motor pengisi bekerja untuk mengisi serbuk kayu.
3.4 Sistem Suhu
Gambar 3.10. Penguat Non – Inverting sepuluh kali
Keluaran sensor suhu LM 35 terlebih dahulu dikuatkan sebesar sepuluh kali agar nilai konversi di dalam mikrokontroler mempunyai perubah yang lebih signifikan dan masih aman. Penguatan sebesar sepuluh kali masih aman pada saat suhu kandang tiba – tiba naik menjadi 30oC (3V). Seandainya penguatan dilakukan sebesar 20 kali, maka pada saat suhu kandang naik menjadi 30oC (Sensor suhu = 300mV) akan terjadi keluaran pada penguat sebesar 6V, hal ini akan merusak mikrokontroler karena tegangan pada referensi mikrokontroler hanya lima Volt. Penguatan keluaran sensor menggunakan Op-Amp dengan konfigurasi Non-Inverting sehingga nilai tegangan keluaran mempunyai penguatan sebesar sepuluh kali dan bermuatan positif. Konstanta Kp, Ki, dan Kd diperoleh melalui percobaan open loop pada alat.
Keluaran sensor dihubungkan ke fasilitas ADC mikrokontroler agar nilai keluaran analog diubah menjadi nilai digital sehingga dapat dibaca oleh mikrokontroler. Pengkonversian ADC pada mikrokontroler menggunakan persamaan(2.1) pada dasar teori dimana tegangan masukan dibagi dengan tegangan referensi dalam hal ini 5V, kemudian dikali dengan 1024.
Di dalam mikrokontroler akan ditambahkan program penguat beda antara nilai suhu digital tersebut dengan nilai yang telah ditetapkan (Setpoint). Untuk mendapatkan nilai proposional maka nilai penguat beda tersebut dikalikan terhadap konstanta proposional, dan untuk mendapatkan nilai integral nilai penguat, sedangkan untuk mendapatkan nilai integral maka nilai integral sebelumnya dijumlahkan terhadap penguat beda yang telah dikalikan konstanta integral, dan untuk mendapatkan nilai differensial maka selisih nilai
Control Maks < Control
penguat beda terhadap penguat beda sebelumnya dikalikan konstanta differensial, kemudian ketiga nilai tersebut dijumlahkan.
Program akan bekerja secara berulang terus sehingga nilai penguat beda saat ini disimpan (ditimpa ke penguat beda sebelumnya) untuk penggunaan penguat beda sebelumnya untuk proses berikut. Pada setiap proses, nilai jumlahan ketiga kontrol tersebut akan dicek untuk mendapatkan nilai maksimum yang telah dicapai, dengan cara menimpa nilai jumlahan yang lebih besar ke nilai jumlahan yang lebih kecil. Nilai jumlahan (kontrol) dan nilai jumlahan maksimum (kontrol maks) ini digunakan dalam pengaturan pwm dengan cara membagi antara kontrol dan kontrol maks kemudian dikali 100. Untuk waktu hidup, nilai pwm dibagi 100 dikali 20ms, dan untuk waktu mati, 19ms dikurang waktu hidup.
Gambar 3.11. Diagram alir sistem suhu
Penguat beda = Out sensor – Set point P = Penguat Beda x Kp I = I + (Penguat Beda x Ki)
D = ( Penguat Beda – Penguat Beda Sebelumnya)/Kd Control = P+I+D
Penguat Beda Sebelumnya = Penguat Beda Start
Set-point = 295K (suhu) Kp= x, kd= y, ki= z
Control Maks = Control
PWM% = (Control/Control Maks)x100% Output PORTC.0 as PWM Suhu = Out Sensor(mV)/10 Tampilkan LCD = suhu
Suhu 20oC untuk batas bawah dan 24oC untuk batas atas, yang artinya pada saat suhu menyentuh angka 20oC atau 24oC maka termoelektrik akan bekerja maksimal, dan pada saat sama dengan nilai setpoint termoelektrik tidak bekerja. Penulis menetapkan nilai setpoint pada nilai tengah antara batas atas dan batas bawah tersebut yaitu bernilai 22oC yang jika dikonversikan pada nilai tegangan yaitu bernilai sebesar 220mV.
Keluaran dari pin PID pada mikrokontroler akan diteruskan ke penguat daya agar cukup kuat untuk menyuplai termoelektrik. Penguat beda yang bernilai negatif berar
![Gambar 2.3 Register 1CR1H/L [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1666152.2073843/24.612.24.585.153.692/gambar-register-cr-h-l.webp)