i
ii
Penggunaan robot dalam industri automotif telah banyak berkembang atas kepentingannya dalam kilang(kilang automotif. Automasi robotik merupakan penyelesaian yang baik untuk pengeluaran kilang automotif ini kerana kebanyakan aktiviti industri pembuatan disifatkan sebagai berulang, berbahaya dan berat. Proses pengimpalan merupakan antara operasi pengeluaran kilang automotif yang banyak bergantung kepada penggunaan aplikasi robotik. Ini disebabkan proses pengimpalan memerlukan operasi yang berulangan dan berterusan. Selain itu, penggunaan robotik juga membantu dalam meningkatkan kualiti hasil kerja pengimpalan. Projek ini mengandungi dua tujuan. Pertamanya adalah untuk menganalisa
iii
iv
I would like to express my gratitude to my supervisor, Dr. Zamberi bin Jamaludin for his support, encouragement, supervision and useful suggestions throughout this research work. His continuous guidance enabled me to complete my study successfully. I would also like to thank Mr. Muhammad Hafidz Fazli B. Md Fauadi, my ex(supervisor for his encouragements and enthusiastic helps in the first part of the study. I am truly grateful of their knowledge sharing and time spending in order to help me to complete the project.
Besides, I am ever, indebted to my parents for their love and support throughout my life. Although they did not contribute much in the information in the thesis, their moral supports are more than enough for me to overcome all the challenges I met during the study. I would also like to thank my brother for providing me a good computer for me to use the software related and to complete my thesis. Without him, my thesis could not be completed too.
v
Abstract i
Abstrak ii
Dedication iii
Acknowledgement iv
Table of Content v
List of Tables ix
List of Figures x
List of Abbreviations xii
1.1 Background 1
1.2 Problem Statements 3
1.3 Objectives 4
1.4 Scope of Study 4
1.5 Summary 4
2.1 Introduction 5
2.2 History of Robot 6
2.2.1 What is Robot? 6
2.2.2 Robot Timeline 6
2.3 Classification of Robots 8
2.3.1 Cartesian Robot 8
2.3.2 Cylindrical Robot 9
vii Components to be Weld
viii
Programming of Robots Behaviour Spot Weld Gun Class Module Gripper Class Module
Kinematics Analysis
Forward Kinematics of Spot Welding Robot Forward Kinematics of Assisting Robot Path Planning
Future Work and Recommendations
87 89
ix
2.1 Timelines of Robots 7
2.2 Four Arm Parameters 27
3.1 Gantt Chart of PSM I 39
3.2 Gantt Chart of PSM II 40
5.1 Arm Parameters of Spot Welding Robot 63
5.2 Arm Parameters for Assisting Robot 67
x
1.1 Spot welding of a car body in an assembly line 2
1.2 Spot welding 3
2.1 Cartesian robot 9
2.2 Cylindrical robot 9
2.3 Spherical robot 10
2.4 Articulate robot 11
2.5 The PTP motion 15
2.6 The continuous path motion 16
2.7 Welding application 18
2.8 Robot spot welding car body 18
2.9 Spray painting 19
2.10 Palletizing 20
2.11 Material Handling 20
2.12 Assembly process of a car 21
2.13 Relationship of forward and inverse kinematics 21
2.14(a) Roll 22
2.14(b) Pitch 22
2.14(c) Yaw 23
2.15 A transformation that consists rotation and translation 24
2.16 The four values (θ, d, a, α) identified relating one joint to the next 26
2.17 Polynomial trajectories with via points 30
2.18 Spot welding 30
2.19 Process to determine robotic work space simulation 34
xi
3.1 Methodology of the complete study 41
4.1 Arrangement of components in the workstation 48
4.2 Spot welding robot (ABB 6400 series) 49
4.3 End(effector of spot welding robot (C spot weld gun) 49
4.4 Assisting robot (ABB 6400 series) 50
4.5 Robot tool for pick and place 50
4.6 Car body 51
4.7 Roof of the car 51
4.8 Roof transferred by assisting robot while spot welding robots 52 ready in position
4.9 Welding route of both spot weld robots 53
4.10 Spot welding process ongoing while assisting robot holding the roof 53 4.11 Process flow of the spot welding process of car roof 54
Assisting robot grasping the roof
Assisting robot holding roof while spot welding robots move to first welding position
Spot welding robots welding at the second path
Spot welding completed and parts transferred to next station Coding for spot weld gun
Coding for gripper
Graph of distance versus time Graph of speed versus time Graph of acceleration versus time
57
Path planning for robots system
Working envelopes for spot welding robots Working envelope for assisting robot Working envelope for all three robots Space for future allocation of new robot
xii CAD ( Computer Aided Design D(H ( Denavit – Hartenberg DoF ( Degree of Freedom GP ( Geometry Points
ISO ( International Organization for Standardization PC ( Personal Computer
PTP ( Point to Point
RMS ( Robot Manufacturing System RUR ( Rossum’s Universal Robots
!" # $% !& # #% ' (
)
!& # #%*
% + % , % -% " % ' %
% )
.
/ )
' 0
# 1 #2 !&
#
-) 3
4
-5
6 7
-! *88 # $%
- 3
)
6
7 #
-4 !" # % !9 4
# :% )
, ,
'
2 6 : +/
2
- !" # %
!" #$ $ !
$"
)
;
+ 6
4 '
< .
, 3
%
& $ ' "
) 4 *
% ) / =
% )
4 =
% ) /
( #
)
* #$
+
,
!9 4 # :% !" 1% +
> ?; 9-",@A
, # !!
+
' 4
.
5
CHAPTER 2
LITERATURE REVIEW
2.1 Introduction
In this chapter, sources from journals, case studies and articles related are
summarized. All the information obtained will act as a guideline or references for
this study field. Analysis and detail research are done from these information
obtained to compile in this report for better exposure and understandings.
Robots are capable of performing many different tasks and operations precisely and
do not require common safety and comfort elements need. However, it takes much
effort and many resources to take a robot function properly. Hence, various types of
research and studies need to be done from various reading materials and the global
search engine on all the related information required in this study field.
When it comes to robots, reality still lags science fiction. But, just because robots
have not lived up to their promise in past decades does not mean that they will not
arrive sooner or later. Indeed, the confluence of several advanced technologies is
bringing the age of robotics ever nearer; smaller, cheaper, more practical and cost&
6
2.2 History of Robot
2.2.1 What is Robot?
The Robot Institute of America (1979) defined a robot as a re&programmable, multi&
function manipulator designed to move material, parts or specialized devices through
variable programmed motions for performance of a variety of tasks. However, there
are many other definitions for robots where the encyclopedia defines a robot as a
stand – alone hybrid computer system that performs physical and computational
activities. In addition, robots are capable of performing many different tasks as it is a
multiple&motion device with one or more arms and joints.
Another definition given by the International Organization for Standardization (ISO)
in ISO 8373 states that robot is an automatically controlled, reprogrammable,
multipurpose, manipulator programmable in three or more axes, which may be either
fixed in place or mobile for use in industrial automation applications.
The acclaimed Czech playwright Karel Capek (1890&1938) made the first use of the
word ‘robot’. The word robot is originated from the Czech word which means
slave laborer. The use of the word robot was introduced into his play R.U.R
(Rossum's Universal Robots) which opened in Prague in January 1921.
There are no an exact definition of robot which can satisfy everyone and many
people have their own definitions. However, it can be generally concluded that from
the above mentioned definitions, the programmable and re&programmable multi&
functions are the most important features of a robot system.
2.2.2 Robot Timeline
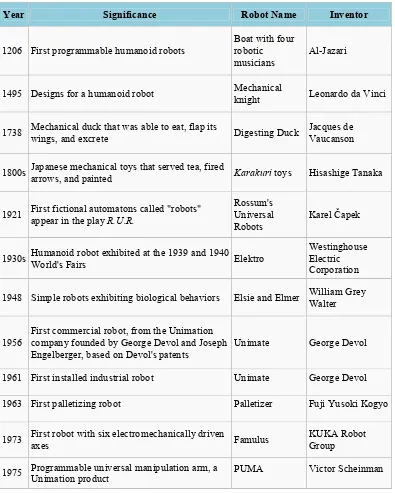
Table 2.1 shows that robot has been evolved greatly since it has been from the first
7
Table 2.1 : Timelines of Robots (http://en.wikipedia.org, 2008)
Year Significance Robot Name Inventor
1206 First programmable humanoid robots
Boat with four robotic musicians
Al&Jazari
1495 Designs for a humanoid robot Mechanical
knight Leonardo da Vinci
1738 Mechanical duck that was able to eat, flap its
wings, and excrete Digesting Duck
Jacques de Vaucanson
1800s Japanese mechanical toys that served tea, fired
arrows, and painted toys Hisashige Tanaka
1921 First fictional automatons called "robots" appear in the play
Rossum's Universal Robots
Karel Čapek
1930s Humanoid robot exhibited at the 1939 and 1940
World's Fairs Elektro
Westinghouse Electric Corporation
1948 Simple robots exhibiting biological behaviors Elsie and Elmer William Grey Walter
1956
First commercial robot, from the Unimation company founded by George Devol and Joseph Engelberger, based on Devol's patents
Unimate George Devol
1961 First installed industrial robot Unimate George Devol
1963 First palletizing robot Palletizer Fuji Yusoki Kogyo
1973 First robot with six electromechanically driven
axes Famulus
KUKA Robot Group
1975 Programmable universal manipulation arm, a Unimation product
PUMA Victor Scheinman
At year 1989, the first biped walking robot which was able to walk on a terrain
stabilized by trunk motion was developed by Kato which is named, WL12RIII
(Jaeger, 2004). It could walk at a rate of 2.6 seconds, up and down stairs. Then robots
revolved to another form where Honda creates P2, the first major step in creating
their ASIMO in year 1996. P2 is the first self®ulating, bipedal humanoid robot
8
At year 2002, Honda creates the Advanced Step in Innovative Mobility (ASIMO). It
is intended to be a personal assistant. It recognizes its owner's face, voice, and name.
ASIMO can read email and is capable of streaming video from its camera to a PC.
While at year 2005, The Korean Institute of Science and Technology (KIST), creates
HUBO, and claims it is the smartest robot in the world. This robot is linked to a
computer via a high&speed wireless connection; the computer does all of the thinking
for the robot (Jaeger, 2004).
2.3 Classification of Robots
Industrial robots are categorized by the first three joint types which are the
prismatic/translational (linear) joint and rotational joints. These two types of joint is
the most current used in industrial robots. There are four different types of robot
configurations which are :
a) Cartesian
b) Cylindrical
c) Spherical
d) Articulated
2.3.1 Cartesian Robot
This type of robot has the first three joints corresponding to the major axes which are
all prismatic (PPP) as shown in Figure 2.1. This type of robot is commonly used for
positioning tools such as dispensers, cutters, drivers and routers (Parker, 2008). The
primary applications of this robot are in material handling, machine loading and
printer board construction. The advantages of Cartesian robot are that the
configuration and design are simple, motion control in Cartesian space can be easily
carried out and large work envelop. The robot will be easier to visualize and have
better inherent accuracy than most other types besides easier to be program offline.
On the other hand, the limitations of this type of robot are that it is not space efficient