BAB 2
LANDASAN TEORI
2.1. Nearest Neighbor
Nearest neighbor merupakan salah satu teknik interpolasi paling sederhana dan cepat dengan memindahkan ruang yang kosong dengan piksel yang berdekatan (the nearest neighboring pixel) pada saat pengecilan atau pembesaran skala gambar (Safinaz, 2014).
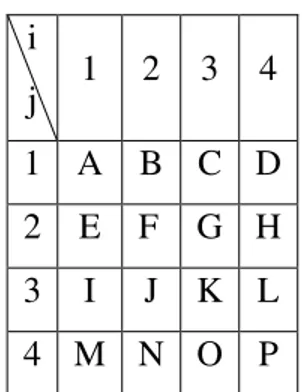
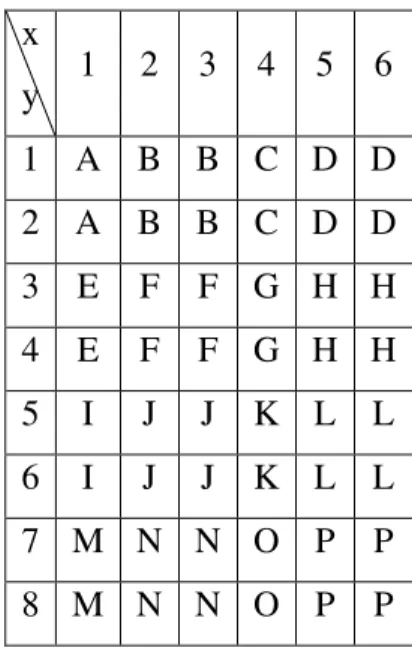
Menurut Malepati (2010), nearest neighbor menggunakan nilai piksel terdekat pada gambar awal untuk memberikan nilai piksel pada gambar awal yang akan diperbesar atau diperkecil. Sebagai contoh terdapat sebuah gambar dengan ukuran 4 x 4 dengan jumlah piksel 16 dimana setiap pikselnya diwakilkan dengan nilai A, B, C, D, E, F, G, H, I, J, K, L, M, N, O, P. Kemudian gambar akan diperbesar menjadi ukuran 6 x 8 dengan jumlah piksel 48 menggunakan nearest neighbor. Ilustrasi gambar awal dengan ukuran 4 x 4 beserta nilai pikselnya dapat dilihat pada Gambar 2.1. Hasil gambar setelah diperbesar menjadi ukuran 6 x 8 beserta nilai pikselnya menggunakan neareast neighbor dapat dilihat pada pada Gambar 2.2.
Gambar 2.1. Nilai-Nilai Piksel Gambar Awal (Malepati, 2010) i j 1 2 3 4 1 A B C D 2 E F G H 3 I J K L 4 M N O P
x y 1 2 3 4 5 6 1 A B B C D D 2 A B B C D D 3 E F F G H H 4 E F F G H H 5 I J J K L L 6 I J J K L L 7 M N N O P P 8 M N N O P P
Gambar 2.2. Nilai Piksel Setelah Gambar Diperbesar (Malepati, 2010)
Adapun contoh proses perhitungan untuk mendapatkan setiap nilai piksel pada gambar dengan ukuran 6 x 8 yaitu:
Perbandingan lebar (ratio weight) = 4 : 6 = 2 : 3. Perbandingan panjang (ratio height) = 4 : 8 = 1 : 2. - Untuk posisi piksel dengan nilai x = 1, y = 1
Pikselx = ceil(x * ratio weight) = ceil(1 * 2/3) = 1
Piksely = ceil(y * ratio height) = ceil(1 * ½) = 1
Nilai piksel pada gambar ukuran 6 x 8 dengan x = 1 yang menghasilkan Pikselx =
1dan y = 1 yang menghasilkan Piksely = 1disesuaikan dengan nilai piksel pada
gambar awal dengan i = 1 dan j = 1 yaitu A. - Untuk posisi piksel dengan nilai x = 1, y = 2
Pikselx= ceil(x * ratio weight) = ceil(1 * 2/3) = 1 Piksely = ceil(y * ratio height) = ceil(2 * ½) = 1
Nilai piksel pada gambar ukuran 6 x 8 dengan x = 1 dan y = 2 juga memiliki nilai A.
- Untuk posisi piksel dengan nilai x = 6, y = 8 Pikselx = ceil(x * ratio weight) = ceil(6 * 2/3) = 4
Nilai piksel pada gambar ukuran 6 x 8 dengan x = 6 yang menghasilkan Pikselx =
4dan y = 8 yang menghasilkan Piksely = 4disesuaikan dengan nilai piksel pada
gambar awal dengan i = 4 dan j = 4 yaitu P.
Ceil (ceiling)merupakan proses pembulatan sebuah bilangan ke atas.
2.2. Grayscaling
Grayscaling dilakukan untuk mengkonversi ruang warna ke ruang warna keabuan. Grayscaling mengubah citra warna yang memiliki ruang warna RGB (Red Green Blue) menjadi citra keabuan. Ketiga channelred, green, dan blue diubah menjadi satu channel gray (keabuan) menggunakan persamaan 2.1 (Bradski & Kaehler, 2008).
Y = 0.299.R + 0.587.G + 0.114.B (2.1) Dimana: Y = citra hasil konversi RGB menjadi Grayscale
R = nilai redchannel pada piksel
G = nilai greenchannel pada sebuah piksel B = nilai bluechannel pada sebuah piksel
Proses mengkonversi citra RGB menjadi citra keabuan (grayscale) dilakukan agar pemrosesan lebih cepat dan efisien dengan menggunakan citra 8 bit (Chairunnisa, 2015).
2.3.Frame Differencing
Frame differencing adalah sebuah teknik yang digunakan untuk mendeteksi perbedaan piksel antara dua frame gambar dalam satu video. Teknik ini dapat mendeteksi pergerakan objek berdasarkan perbedaan piksel pada dua frame dalam satu video dengan interval waktu yang singkat. Perbedaan frame dalam sebuah video diperoleh menggunakan perhitungan pada persamaan 2.2, 2.3 dan 2.4 (Alex & Wahi, 2014). Differential:
Dk = { (2.2) Negative Differential:
Fully Differential:
Dk = (2.4) Dimana: Dk = hasil citra frame differencing
= citra frame
= citra frame sebelumnya dengan interval waktu
Teknik frame differencing telah diimplementasikan dalam beberapa penelitian sebelumnya. Kang & Hayes (2015) menggunakan teknik frame differencing dalam penelitian mengenai pengenalan wajah untuk personalisasi kendaraan. Chairunnisa (2015) melakukan perbandingan antara citra frame awal dan frame selanjutnya pada citra hasil konversi warna grayscale dengan menggunakan fungsi frame differencing pada OpenCV yaitu absdiff(). Fungsi tersebut dapat menghitung perbedaan mutlak antar dua array atau matriks ketika kedua matriks memiliki ukuran dan jenis yang sama. Adapun penjelasan tentang fungsi absdiff() yaitu:
absdiff(src1,src2,dst) Parameter:
- src1: input frame awal yang akan dibandingkan - src2: input frame selanjutnya yang akan dibandingkan - dst: hasil keluaran perbandingan frame berupa matriks citra
Berikut ini merupakan pseudecode proses framedifferencing yang diimplementasikan pada penelitian:
Inisialisasi frame awal, frame selanjutnya dan frame perbedaan Inisialisasi jumlah frame = 0
IF (jumlah frame = 0) THEN
SET frame perbedaan = frame selanjutnya ELSE
SET absdiff(frame awal, frame selanjutnya,frame perbedaan) jumlah frame = jumlah frame + 1
ENDIF
2.4.Principal Component Analysis
Principal Component Analysis (PCA) merupakan teknik statistika untuk mentransformasi himpunan sekumpulan variabel menjadi himpunan variabel dengan jumlah yang lebih kecil, tetapi tetap mampu merepresentasikan informasi yang terdapat pada himpunan variabel sebelum ditransformasi. Adapun tujuan mengurangi dimensionalitas dari data asli menggunakan PCA adalah agar data lebih mudah dimengerti dan lebih mudah diproses (Dunteman, 1989).
Apabila diketahui X = {xnRd | n = 1, 2, ..., N} yang merepresentasikan sebuah
dataset dengan dimensi d, dari dataset X tersebut, PCA akan menghasilkan dataset Z, dimana Z = {znRk | n = 1, 2, ..., N} dengan dimensi k, dimana nilai k adalah lebih
kecil dari d. Langkah-langkah yang dilakukan dalam PCA terdiri atas (Jolliffe, 2002): 1. Normalisasi setiap dimensi data dengan menggunakan rumus normalisasi Z-score:
A i i A v v ' (2.5)
Setelah melalui proses ini, dataset akan memiliki nilai mean atau rata-rata nol. 2. Cari matriks kovarian menggunakan rumus:
X X m T 1 (2.6)
, dimana adalah matriks kovarian; m merupakan banyak data pada dataset asli; X adalah dataset asli yang disusun dalam bentuk matriks dengan setiap kolom merupakan fitur, dan setiap baris merupakan kumpulan fitur untuk satu objek; XT merupakan transpos dari matriks X. Hasil matriks kovarian adalah matriks dengan ukuran dxd, dimana d merupakan dimensi dari X.
3. Hitung nilai eigenvalue serta eigenvector dari matriks kovarian, dengan melakukan Single Value Decomposition pada matriks kovarian. Eigenvalue dan eigenvector merupakan vektor-vektor yang mengkarakterisasikan dataset X. Apabila dimiliki data awal dengan dimensi d, maka akan didapatkan eigenvector sebanyak d.
4. Urutkan eigenvector sesuai dengan nilai eigenvalue yang dimiliki secara menurun, dimana eigenvector dengan nilai eigenvalue yang lebih tinggi berada pada sisi kiri matriks dan eigenvector dengan nilai eigenvalue yang lebih rendah berada pada sisi kanan matriks.
5. Pilih eigenvector sebanyak k untuk membentuk vektor fitur U, dimana dari vektor fitur U akan dihasilkan data hasil PCA dengan dimensi k. Pemilihan eigenvector dilakukan berdasarkan nilai eigenvalue dari eigenvector. Akan dipilih eigenvector dengan nilai eigenvalue tinggi, sehingga informasi data asli tetap akan terjaga pada data hasil PCA. Hal ini dikarenakan eigenvector dengan eigenvalue tinggi menunjukkan data yang direpresentasikan eigenvector tersebut adalah signifikan.
Penentuan nilai dimensi k untuk dataset hasil PCA ditentukan berdasarkan retain rate. Retain rate adalah persentase informasi yang yang tetap terjaga pada data hasil PCA dari dataset asli. Pemilihan nilai dimensi k pada umumnya dipilih dengan menjaga retain rate pada nilai 99%, yakni memenuhi persamaan 2.7. Hal ini dilakukan agar seluruh informasi pada dataset asli tetap dapat direpresentasikan oleh dataset hasil PCA.
99 , 0 1 1
m i k i i Si S (2.7)Si adalah eigenvalue pada posisi ke-i. Seluruh nilai dari eigenvector yang dipilih
kemudian disusun sebagai kolom sebuah matriks vektor fitur U. 6. Hasil datasetPCA dihasilkan menggunakan rumus:
X U
Z T (2.8)
, dimana Z merupakan matriks dataset hasil PCA; U adalah matriks vektor hasil pemilihan eigenvector yang didapatkan pada tahap sebelumnya; X adalah matriks dataset asli.
Metode PCA menghasilkan dataset yang mampu mendeskripsikan dataset asli dengan tetap menjaga informasi yang tersimpan sebanyak mungkin (Amirani, et al. 2008).
2.5.Artificial Neural Network
Negnevitsky (2005) mendefinisikan Artificial Neural Network atau jaringan saraf tiruan sebagai model logika yang bekerja berdasarkan otak manusia. Cara kerja otak yang dengan menggunakan sejumlah neuron sederhana dan saling terhubung dengan sebuah nilai bobot yang meneruskan signal dari satu neuron menuju neuron lainnya dapat dimodelkan oleh sebuah jaringan saraf tiruan. Input akan diterima oleh setiap
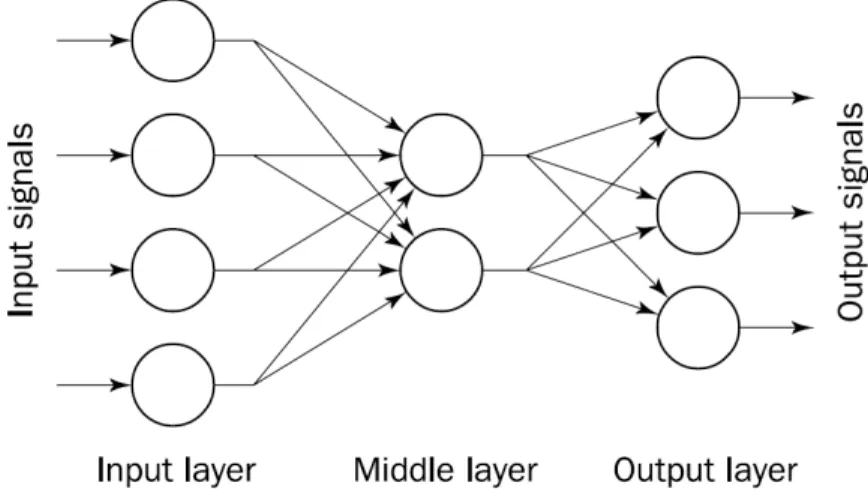
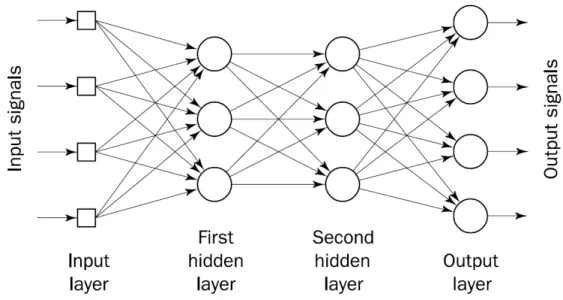
neuron melalui hubungannya. Sebuah output yang sesuai dengan nilai bobot pada hubungan tersebut akan dihasilkan oleh neuron tersebut, kemudian output akan diteruskan kembali ke neuron yang lain. Setiap neuron pada jaringan saraf tiruan terdiri dari beberapa layer atau lapisan. Sebuah jaringan saraf tiruan pada umumnya terdiri dari tiga layer, yakni: input layer yaitu node-node yang menerima signal input, middle layer yang juga disebut sebagai hidden layer yaitu node yang menghubungkan node pada input layer dengan node pada output layer, dan output layer yaitu node-node yang menghasilkan signal output. Jaringan saraf tiruan belajar dengan melakukan penyesuaian nilai bobot yang digunakan untuk mengirimkan nilai dari satu neuron ke neuron lain. Arsitektur umum dari sebuah jaringan saraf tiruan dapat dilihat pada Gambar 2.3.
Gambar 2.3. Arsitektur Umum Sebuah Jaringan Saraf Tiruan (Negnevitsky, 2005)
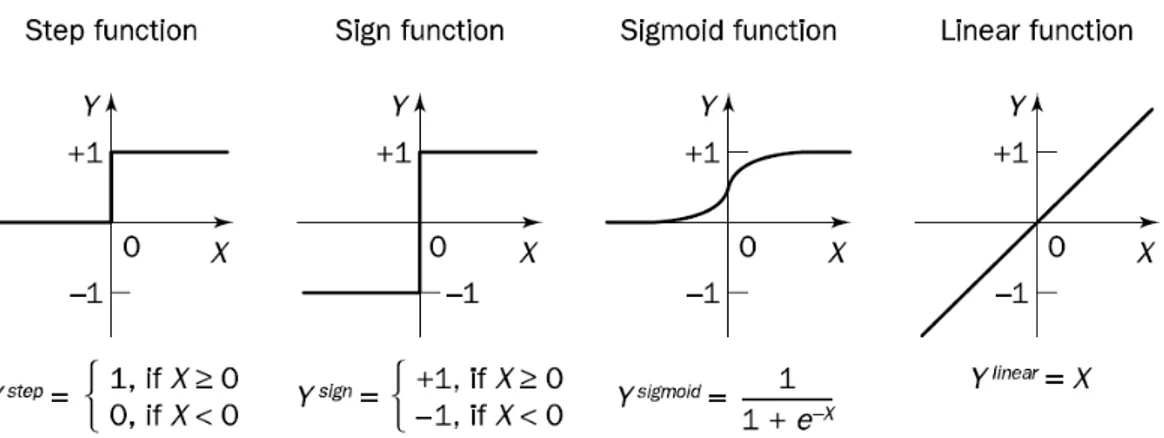
Sebuah fungsi yang disebut sebagai fungsi aktivasi digunakan untuk menentukan output dari sebuah neuron. Ada empat jenis fungsi aktivasi yang secara umum digunakan, yakni: step function, sign function, sigmoid function, dan linear function. Setiap jenis fungsi aktivasi berserta grafik yang menggambarkan fungsi dapat dilihat pada Gambar 2.4.
Gambar 2.4. Fungsi Aktivasi Neuron (Negnevitsky, 2005)
Step function dan sign function disebut sebagai fungsi pembatasan kasar yang digunakan secara umum pada permasalahan klasifikasi dan pengenalan pola. Sigmoid function digunakan pada jaringan propagasi balik dan dapat mengubah input yang memiliki jangkauan nilai [-∞, ∞] menjadi output dengan jangkauan nilai [0,0, 1,0]. Linearactivation function digunakan pada pendekatan linear dan dapat menghasilkan output yang sama dengan input yang diterima oleh neuron.
Jaringan saraf tiruan dapat digunakan untuk dua jenis konsep pembelajaran, yakni: 1. Pembelajaran supervised, yaitu pembelajaran yang dilakukan dengan menerima
sekumpulan contoh yang ditandai sebagai data pelatihan dan membuat prediksi untuk seluruh titik yang tidak diketahui. Pembelajaran ini sudah terlebih dahulu mengetahui output yang diharapkan berdasarkan input yang diberikan (Mohri, et al., 2012).
2. Pembelajaran unsupervised, yaitu pembelajaran yang dilakukan dengan menerima sekumpulan data pelatihan yang tidak ditandai dan membuat prediksi untuk seluruh titik yang tidak diketahui. Pembelajaran ini tidak dapat terlebih dahulu mengetahui output dari input yang diberikan sehingga memerlukan metode lain untuk mengelompokkan input yang diberikan (Mohri, et al., 2012).
2.6.Deep Neural Network
Deep Neural Network merupakan sebuah jaringan saraf tiruan (Neural Network) yang memiliki lebih dari satu hidden layer, sehingga DNN juga dikenal sebagai multilayer perceptron. Output pada sebuah multilayer perceptron dapat ditentukan menggunakan
rumus fungsi aktivasi sigmoid function. Arsitektur dari sebuah multilayer perceptron dengan dua hidden layer dapat dilihat pada Gambar 2.5 (Negnetvisky, 2005).
Gambar 2.5. Arsitektur Multilayer Perceptron dengan Dua Hidden Layer (Negnevitsky, 2005)
Deep Neural Network juga menggunakan arsitektur deep (deep architectures). Arsitektur deep terdiri atas beberapa tingkat operasi non-linear, seperti jaringan saraf tiruan dengan banyak hidden layer atau dalam sebuah rumusan yang menggunakan banyak sub-rumusan (Bengio, 2009).
Deng & Yu (2014) mendefenisikan DNN adalah generasi baru dari jaringan saraf tiruan yang menggunakan konsep deep learning. Deep learning adalah sebuah kumpulan teknik pembelajaran mesin yang memanfaatkan banyak lapisan pemrosesan informasi linear untuk ekstraksi fitur dan transformasi yang supervised dan unsupervised, serta untuk analisis pola dan klasifikasi. Deep learning terbagi menjadi tiga kategori, yakni:
1. Deep networks untuk pembelajaran unsupervised atau generatif, bertujuan untuk mendapatkan korelasi atau keterkaitan antara data yang dapat diobservasi untuk analisis pola pada saat informasi tentang hasil yang seharusnya didapatkan tidak ada.
2. Deep networks untuk pembelajaran supervised, bertujuan menyediakan kemampuan untuk membedakan klasifikasi pola secara langsung, dilakukan dengan mengkarakteristik distribusi kelas untuk data.
3. Hybrid deep networks, memiliki tujuan sebagai pembeda dimana secara signifikan dibantu dengan hasil yang didapatkan dari deep network untuk pembelajaran unsupervised.
Heaton (2015) mendefinisikan deep learning adalah sebuah pengembangan baru dalam bidang pemrograman jaringan saraf tiruan yang memberikan cara untuk melatih DNN. Jaringan saraf tiruan dengan lebih dari dua lapisan (layer) disebut sebagai deep. Kemampuan untuk membuat DNN telah muncul sejak 1943 dimana Pitts mengenalkan multilayer perceptron. Jaringan saraf tiruan pada awalnya belum dapat dilatih secara efektif hingga Hinton berhasil menjadi peneliti pertama yang melatih jaringan saraf tiruan yang rumit pada tahun 1984.
2.7.Backpropagation
Backpropagation atau propagasi balik adalah salah satu algoritma yang digunakan dalam pelatihan multilayer perceptron. Adapun tahapan yang dilakukan pada algoritma ini, yakni (Negnetvisky, 2005):
1. Inisialisasi
Setiap bobot yang menghubungkan seluruh neuron yang ada diberikan nilai acak dengan distribusi yang merata dan jangkauan yang kecil (Haykin, 1999). Inisialisasi untuk nilai setiap bobot dihitung dengan persamaan 2.9.
i i F F 4 , 2 , 4 , 2 (2.9) Dimana: Fi = banyak input dari neuron i pada jaringan
2. Aktivasi (Feed-forward)
Proses aktivasi atau feed-forward akan memasukkan seluruh input yang ada ke dalam jaringan saraf tiruan untuk menghasilkan output. Aktivasi dari jaringan saraf tiruan dilakukan dengan menggunakan input x1(p), x2(p), ..., xn(p) dan output
yang diharapkan yd1(p), yd2(p), …, ydn(p), dengan p adalah jumlah perulangan
yang sudah dilakukan dan p memiliki nilai awal 0.
Output sebenarnya dari setiap neuron pada hidden layer dihitung dengan menggunakan persamaan 2.10.
n i ij i j p sigmoid x p w p y 1 ) ( ). ( ) ( (2.10) Dimana: n = banyak input dari neuron j pada hidden layersigmoid = fungsi aktivasi sigmoid
Output sebenarnya dari setiap neuron pada output layer dihitung dengan menggunakan persamaan 2.11.
m i jk jk k p sigmoid x p w p y 1 ) ( ). ( ) ( (2.11) Dimana: m = banyak input dari neuron k pada outputlayersigmoid = fungsi aktivasi sigmoid
3. Pelatihan bobot
Update atau pembaruan nilai dari setiap bobot pada jaringan saraf tiruan akan dilakukan dengan melakukan propagasi balik terhadap kesalahan (error) pada output layer.
Error pada setiap neuron pada output layer dihitung dengan persamaan 2.12. ) ( ) ( ) (p yk p ydk p k (2.12) Kemudian perbaikan bobot dihitung menggunakan persamaan 2.13.
) 1 ( . ) ( ). ( . ) ( wjk p yj p k p wjk p (2.13)
Dimana: α = konstanta yang menentukan kecepatan pembelajaran dari
algoritma propagasi balik (learning rate)
µ = konstanta yang menentukan besar perubahan update dari bobot (momentum)
Update untuk setiap bobot yang terhubung dengan neuron pada output layer dilakukan dengan menggunakan persamaan 2.14.
) ( ) ( ) 1 (p w p w p wjk jk jk (2.14)
Error pada setiap neuron pada hidden layer dihitung dengan persamaan 2.15.
1 ( )
). ( . ) ( ). ( ) ( 1 p y p y p w p p j j m k jk k j
(2.15)Kemudian perbaikan bobot dihitung menggunakan persamaan 2.16. ) 1 ( . ) ( ). ( . ) ( wij p xi p j p wij p (2.16)
Dimana: α = konstanta yang menentukan kecepatan pembelajaran dari algoritma propagasi balik (learning rate)
µ = konstanta yang menentukan besar perubahan update dari bobot (momentum)
Update untuk setiap bobot yang terhubung dengan neuron pada hidden layer dilakukan dengan menggunakan persamaan 2.17.
) ( ) ( ) 1 (p w p w p wij ij ij (2.17) 4. Iterasi
Penambahan nilai perulangan p sebanyak satu dan kembali ke langkah 2 akan dilakukan apabila kriteria error belum sesuai yang diharapkan. Algoritma pelatihan propagasi balik selesai dilakukan apabila kriteria error telah sesuai yang diharapkan.
2.8.Penelitian Terdahulu
Penelitian mengenai pengenalan gerakan tangan manusia dan metode Deep Neural Network telah dilakukan oleh beberapa peneliti sebelumnya. Neto, et al. (2013) melakukan penelitian mengenai penempatan gerakan tangan yang statis secara real-time dan berlanjut menggunakan metode Artificial Neural Network (ANN). Penelitian ini dilakukan dengan tujuan agar robot dapat melakukan gerakan tangan yang sama dengan gerakan tangan manusia. Bentuk gerakan yang dilatih terdiri dari gerakan yang memiliki arti (communicative) dan gerakan yang tidak memiliki arti ( non-communicative). Hasil penelitian menunjukkan tingkat pengenalan yang sangat baik (99,8% untuk sepuluh gerakan tangan dan 96,3% untuk tiga puluh gerakan). Selain itu, penelitian ini juga menggunakan waktu yang singkat untuk pelatihan dan pembelajaran, memiliki kemampuan untuk mengeneralisasi dan kemampuan untuk mengoperasikan secara independen dari kondisi di sekitar lingkungan.
Tang, et al. (2013) melakukan penelitian mengenai pengenalan postur tangan yang statis secara real-time menggunakan perangkat Kinect. Penelitian ini menggunakan
algoritma skin color model dan depth model untuk deteksi tangan, algoritma kalman untuk melacak tangan (hand tracking) serta mengimplementasikan DNN yakni Deep Belief Network (DBN) dan Convolutional Neural Network (CNN) untuk mengenal postur tangan. Hasil penelitian ini menunjukkan performa yang baik (akurasi menggunakan DBN: 98,063% dan CNN: 93,995%) dalam pendeteksian dan pelacakan tangan, dapat mengatasi masalah terhalangnya tangan serta dapat megenal postur tangan dengan sangat cepat dan real-time. Namun, metode deteksi tangan yang digunakan masih bergantung pada data warna dan kedalaman sehingga akurasi bergantung pada konten dan pencahayaan gambar.
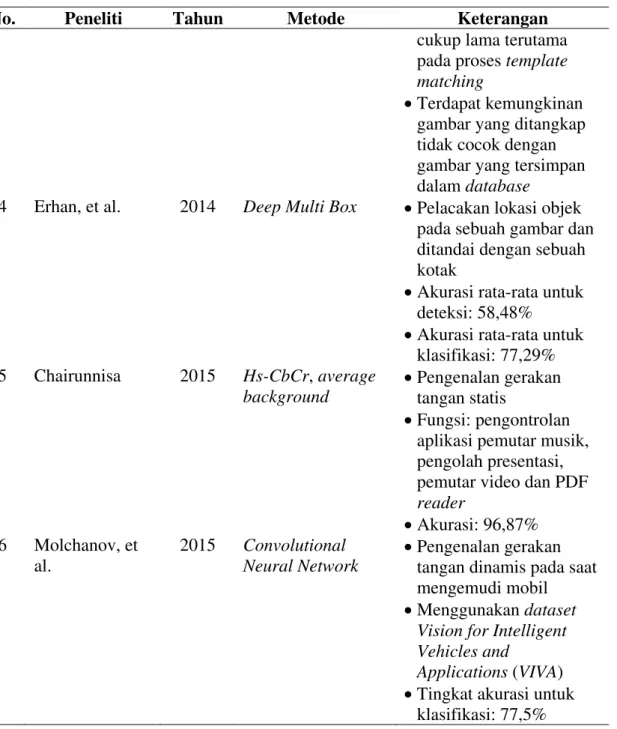
Erhan, et al. (2014) mengajukan metode untuk melakukan pelacakan lokasi objek pada suatu gambar dan memprediksi beberapa kotak penanda pada satu waktu. Metode yang digunakan adalah Deep Multi Box yang mengimplementasikan Deep Convolutional Neural Network sebagai basis ekstraksi fitur dan model pembelajaran untuk memprediksi lokasi kotak penanda. Adapun rata-rata akurasi yang didapatkan untuk deteksi adalah 58,48% dan untuk klasifikasi adalah 77,29%, dengan jumlah window yang digunakan 1-25.
Ramjan, et al. (2014) melakukan penelitian mengenai pengenalan dan pendeteksian gerakan tangan dinamis secara real-time menggunakan interaksi manusia dan komputer. Adapun proses yang dilakukan adalah penangkapan gambar dari video, ekstrasi objek yang terdapat di tangan pada background gambar yang tertangkap serta penggunaan kamera web untuk menelusuri gerakan objek. Objek yang tertangkap kemudian diproses dengan blurring, grayscaling, HSV (Hue Saturation Value) model, dan blob detection. Setelah proses-proses tersebut dilakukan, gambar akan dicocokkan dengan gambar yang tersimpan dalam database untuk menentukan gerakan. Melalui penelitian ini, interaksi yang melibatkan penambahan tulisan baru, pengontrolan media seperti pemutar musik, slide presentasi, photo viewer dan operasi pada PC dapat dilakukan.
Chairunnisa (2015) melakukan penelitian tentang pengenalan gerakan tangan manusia yang statis dengan mengimplementasikan teknik-teknik computer vision, Hs-CbCr (HueSaturation-ChromaBlueChromaRed) untuk mendeteksi warna kulit dan teknik average background untuk mengatasi masalah background. Penelitian ini menunjukkan bahwa dengan kondisi tangan kosong dan latar belakang yang kompleks melalui kamera web sudah dapat mengendalikan aplikasi pengolah presentasi,
pemutar musik, pemutar video dan PDF reader. Selain itu, tingkat akurasi 96,87% dalam mengenali gerakan tangan manusia dengan syarat kondisi pencahayaan yang baik juga dicapai.
Molchanov, et al. (2015) meneliti mengenai pengenalan gerakan tangan secara dinamis pada saat mengemudi mobil dengan menggunakan metode Convolutional Neural Network (CNN). Penelitian ini menggunakan dataset dari Vision for Intelligent Vehicles and Applications (VIVA). Hasil dari penelitian ini mencapai tingkat akurasi 77,5 % untuk klasifikasi. Rangkuman penelitian terdahulu dapat dilihat pada Tabel 2.1.
Tabel 2.1. Penelitian Terdahulu
No. Peneliti Tahun Metode Keterangan
1 Neto, et al. 2013 Artificial Neural Network (ANN)
Pengenalan gerakan tangan statis
Fungsi: agar robot dapat melakukan gerakan tangan manusia secara statis
Waktu pelatihan dan pembelajaran yang singkat
Akurasi untuk sepuluh gerakan tangan 99,8% dan untuk tiga puluh gerakan tangan 96,3% 2 Tang, et al. 2013 Pendeteksian
tangan:
Color skin model dan depth model Pelacakan tangan: Kalman Pengenalan postur tangan: DBN dan CNN Pengenalan postur tangan secara real time
Akurasi:
DBN: 98,063% CNN: 93,995%
Waktu pengenalan rata-rata:
DBN: 0,000899 detik CNN: 0,001165 detik
Metode deteksi tangan bergantung pada data warna dan kedalaman 3 Ramjan, et al. 2014 Ekstrasi fitur:
Blob detection Pengenalan: Template/pattern matching Pengenalan gerakan tangan dinamis
Fungsi: interaksi untuk penambahan tulisan baru, pengontrolan media dan operasi pada PC
Tabel 2.1. Penelitian Terdahulu (lanjutan)
No. Peneliti Tahun Metode Keterangan
cukup lama terutama pada proses template matching
Terdapat kemungkinan gambar yang ditangkap tidak cocok dengan gambar yang tersimpan dalam database
4 Erhan, et al. 2014 Deep Multi Box Pelacakan lokasi objek pada sebuah gambar dan ditandai dengan sebuah kotak
Akurasi rata-rata untuk deteksi: 58,48%
Akurasi rata-rata untuk klasifikasi: 77,29% 5 Chairunnisa 2015 Hs-CbCr, average background Pengenalan gerakan tangan statis Fungsi: pengontrolan aplikasi pemutar musik, pengolah presentasi, pemutar video dan PDF reader Akurasi: 96,87% 6 Molchanov, et al. 2015 Convolutional Neural Network Pengenalan gerakan tangan dinamis pada saat mengemudi mobil
Menggunakan dataset Vision for Intelligent Vehicles and
Applications (VIVA)
Tingkat akurasi untuk klasifikasi: 77,5%
Perbedaan penelitian yang dilakukan dengan penelitian terdahulu adalah penelitian ini berfokus pada pengenalan gerakan tangan manusia yang terdiri dari enam yaitu gerakan tangan dari kiri ke kanan, dari kanan ke kiri, dari atas ke bawah, dari bawah ke atas, dari depan ke belakang dan dari belakang ke depan. Kemudian, hasil pengenalan gerakan tangan manusia akan digunakan untuk mengendalikan beberapa aplikasi komputer. Adapun metode yang diimplementasikan dalam penelitian ini, yakni:
Melakukan beberapa tahap preprocessing untuk mengurangi parameter input dimana bertujuan untuk mempercepat proses pelatihan dan pengenalan gerakan tangan. Adapun tahap pre-processing yang dilakukan yaitu:
- pemisahan video gerakan tangan menjadi beberapa frame gambar, - setiap frame gambar diperkecil dengan algoritma nearest neighbour, - setiap frame gambar dilakukan proses grayscaling,
- setiap frame gambar dilakukan proses frame differencing dengan gambar pertama,
- empat gambar akan dipilih dari kumpulan gambar yang telah melalui proses frame differencing,
- proses Principal Component Analysis (PCA) dilakukan pada empat gambar yang telah dipilih.
Menggunakan metode Deep Neural Network untuk mengenali gerakan tangan manusia.