PENGEMBANGAN SISTEM PENENTU SUDUT PANDANG WAJAH 3-D
DENGAN MENGGUNAKAN PERHITUNGAN JARAK TERPENDEK
PADA GARIS CIRI DALAM RUANG EIGEN
Benyamin Kusumoputro dan Rina Sripomo
Laboratorium Kecerdasan Komputasional, Fakultas Ilmu Komputer, Universitas Indonesia, Depok, 16424
E-mail: [email protected]
Abstrak
Dalam makalah ini, penulis akan mengemukakan Sistem Penentu Sudut Pandang obyek wajah 3D dengan menggunakan metoda perhitungan jarak terpendek pada garis ciri yang dibentuk dalam ruang eigen. Sistem penentu sudut pandang ini merupakan sebuah subsistem bagi Sistim Pengenal Wajah 3-D yang sedang dikembangkan dengan menggunakan jaringan neural buatan. Sebagai citra masukan bagi pembentukan garis ciri dalam ruang eigen ini, digunakan beberapa citra wajah orang Indonesia dalam perbagai sudut pandang dan ekspresi. Dan sebagai citra uji, penulis menggunakan beberapa citra dengan sudut pandang pengamatan yang tidak dipergunakan dalam pembentukan garis ciri dalam ruang eigen. Hasil penelitian menunjukkan bahwa tingkat pengenalan sistem penentu sudut pandang ini dapat mencapai derajat yang cukup tinggi, dengan tingkat kebenaran tertinggi sekitar 90 persen.
Abstract
In this paper, we implemented a visual point estimation system using the nearest feature line method that is developed on human face’s eigenspace representation. This methodology is developed as a subsistim in a 3-D face recognition system using a neural networks, in order to develop a high accuracy Automatic Face Recognition (AFR) system with low computational cost. Several images of Indonesian human faces with various visual points and expressions are used as the input to the developed visual points estimation system, and another images, with their visual points is not used in the generating the feature lines, then used as the testing images. Results of experiments show that the visual points estimation system could determined the pose of the unknown position of 3-D face with its highest accuracy is about
90%.
Keywords: 3D face recognition system, nearest feature line method, eigenspace representation, principal component
analysis
Pendahuluan
Kemampuan untuk dapat mengidentifikasi wajah sangat diperlukan dalam bidang kepolisian, hukum dan forensik, juga dalam penggunaan wajah sebagai identitas untuk memasuki daerah terlarang. Hal ini menyebabkan pengembangan sistem pengenal wajah (automatic face recognition–AFR) menjadi bahan riset yang sangat penting akhir-akhir ini [1-7]. Pada dasarnya sistem AFR ini terdiri dari subsistem deteksi wajah, yang berfungsi untuk dapat menentukan posisi dan ukuran wajah dalam sebuah citra; subsistem pengenal wajah yang bertugas memperbandingkan citra wajah masukan dengan sekumpulan wajah dalam suatu basis-data; dan subsistem penentu wajah untuk dapat menentukan tingkat pengenalan terhadap citra wajah tersebut. Pada umumnya penelitian sistem pengenal wajah ini dilakukan untuk citra wajah 2 dimensi saja.
Sistim pengenal wajah untuk mampu mengenali wajah secara 3 dimensi kemudian dikembangkan berdasarkan metodologi yang telah dilakukan pada sistim pengenal wajah 2 dimensi. Seperti dinyatakan dalam referensi [8]dan [9], kita dapat membuat sistim pengenal obyek tiga dimensi dengan menggunakan beberapa citra obyek dua dimensi dari beberapa sudut pandang. Penulis telah mengembangkan sistem pengenal obyek 3 dimensi dengan menggunakan jaringan saraf tiruan yang mempunyai lapis tersembunyi berbentuk silinder [10][11]. Akan tetapi Sistem Pengenal Wajah 3-D ini memerlukan informasi sudut pandang obyek 3-D yang tidak kita ketahui sebelumnya. Dalam makalah ini kita akan membahas dan mengajukan metoda penentuan sudut pandang objek tiga dimensi berbasis perhitungan jarak terpendek objek baru tersebut terhadap sekumpulan garis yang dibentuk oleh seluruh obyek awal dalam ruang eigennya. Metode yang digunakan dalam sistem ini merupakan pengembangan dari metode Nearest
Feature Line [12]. Seperti halnya dengan pengenalan obyek wajah atau obyek tiga dimensi, dalam pengembangan sistem
penentu sudut pandang ini, perlu dibangun sebuah basis data sekumpulan citra obyek dengan berbagai sudut pandang yang berlainan.
Dalam makalah ini, basis data wajah akan disimpan dalam ruang eigen yang dibentuk berdasarkan sekumpulan ciri penting dari obyek tersebut. Apabila diberikan sebuah obyek dengan sudut pandang yang tidak diketahui, maka obyek tersebut harus di transformasikan terlebih dahulu kedalam ruang eigen, dan proses penentuan sudut pandang akan dilakukan dalam ruang eigen tersebut. Tranformasi dari ruang spatial kedalam ruang eigen ini dilakukan dengan menggunakan Transformasi Karhunen-Loeve (TK-L) atau Principal Component Analysis (PCA ) [13][14]. Berkaitan dengan usaha untuk meningkatkan derajat ketepatan penentuan sudut pandang obyek 3 dimensi ini, dikembangkan TK-L berdasarkan subset dari seluruh data sudut pandang yang ada. Apabila digunakan seluruh data dari seluruh sudut pandang yang ada, dinamakan sebagai TK-LSELURUH, sedangkan apabila data yang digunakan hanya sebagian sudut pandang tertentu, maka kita menamakannya sebagai TK-LSEBAGIAN. Penjelasan rinci mengenai transformasi Karhunen-Loeve berdasarkan variasi data masukan berdasarkan sudut pandang ini akan dibahas kemudian.
Metode Penelitian
Sudut pandang sebuah obyek tiga dimensi dapat ditentukan dengan memanfaatkan sejumlah citra acuan dua dimensi yang memuat variasi perubahan sudut pandang obyek. Berdasarkan sekumpulan data citra acuan tersebut maka sudut pandang sebuah citra baru dapat ditentukan dengan membuat interpolasi terhadap galleri citra dengan data sudut pandang yang telah kita miliki. Sistem penentu sudut pandang yang dikembangkan penulis juga mengacu pada asumsi dasar tersebut. Sistem penentu sudut pandang obyek 3D ini terdiri dari subsistem ekstraksi ciri, subsistem perhitungan jarak dalam ruang eigen dan subsistem penentuan sudut pandang citra wajah berdasarkan jarak terdekat.
Transformasi Karhunen-Loeve
Dalam sistem penentuan sudut pandang obyek 3-D yang dikembangkan, transformasi data dilakukan dengan dua cara yang berbeda. Dua cara transformasi data tersebut dilakukan dengan menggunakan teknik Transformasi
Karhunen-Loeve dengan merubah basis data yang dipergunakan.
· TK-LSeluruh, yaitu apabila Transformasi K-L dibentuk dengan menggunakan semua citra acuan yang ada menjadi satu ruang eigen. Jadi dalam satu ruang eigen yang dibentuk, sudah terdapat beberapa kelas sudut pandang.
· TK-LSebagian, yaitu apabila Transformasi K-L dibentuk hanya menggunakan sebagian basis data berdasarkan satu kelas sudut pandang tertentu saja untuk membuat ruang eigen. Sedangkan citra acuan untuk kelas sudut pandang yang lain akan digunakan untuk membentuk ruang eigen yang lain. Citra uji yang diujikan akan ditransformasikan ke seluruh ruang eigen yang dibentuk.
Sejumlah citra dua dimensi dari setiap obyek tiga dimensi yang akan dikenali, dikumpulkan untuk mewakili obyek tersebut, dan digunakan sebagai citra acuan. Dari sekumpulan citra acuan tersebut, kemudian dilakukan ekstraksi ciri untuk memperoleh informasi karakteristik (ciri) dari obyek tersebut. Hasil ekstraksi ciri inilah yang digunakan dalam proses pengenalan obyek tiga dimensi.
83
Mendeskripsikan suatu citra obyek menggunakan ruang citra spatial sangat memerlukan biaya komputasi dan tingkat penentuan sudut pandang yang dihasilkan mempunyai tingkat kesalahan yang besar. Untuk menghindari hal ini, maka kita akan merepresentasikan seluruh citra wajah yang ada kedalam ruang eigen. Bentuk representasi ini banyak dimanfaatkan dalam sistem pengenalan wajah sebagai representasi eigenfaces [15][16]. Ide dasar dari representasi tersebut adalah untuk merepresentasikan sekumpulan citra ke dalam sebuah ruang baru berdasarkan ciri yang tidak berkorelasi [17]. Bentuk representasi eigenspace dapat diperoleh dengan melakukan transformasi Karhunen-Loeve terhadap sekumpulan citra acuan.
Transformasi Karhunen-Loeve banyak digunakan untuk memproyeksikan atau mengubah suatu kumpulan data berukuran besar menjadi bentuk representasi data lain dengan ukuran yang lebih kecil [10]. Transformasi Karhunen-Loeve terhadap sebuah ruang data yang besar, akan menghasilkan sejumlah vektor basis orthonormal dalam bentuk kumpulan vektor eigen dari suatu matriks kovarian tertentu, yang dapat secara optimal merepresentasikan distribusi data [11]. Kumpulan vektor basis tersebut digunakan untuk membentuk suatu sub ruang data dengan dimensi yang lebih kecil dan merepresentasikan data baru dari data awal dengan meminimalkan tingkat kesalahan kuadrat rata-rata atau mean square error [12]. Vektor-vektor basis yang membentuk ruang baru diperoleh dari proses pencarian vektor eigen dan nilai eigen dari suatu matriks kovarian tertentu, sehingga ruang baru tersebut dapat kita sebut dengan ruang eigen. Matriks kovarian dibentuk dari sejumlah vektor data zn yang berdimensi d
dengan bentuk:
(1)
dengan z1 hingga zd adalah elemen dari vektor data zn. Untuk sejumlah M vektor data zn, maka vektor rata-rata mz dapat dihitung dengan:
(2)
Dan matriks kovarian Cz dari kumpulan tersebut dapat dihitung dengan: (3)
dengan t11 hingga tnn adalah elemen dari matriks kovarian Cz. Dari matriks kovarian Cz diperoleh lz dan ez, masing-masing merupakan kumpulan nilai eigen dan vektor eigennya. Representasilz dan ez adalah sebagai berikut:
(4)
denganl1 hingga ln adalah elemen dari vektor nilai eigen lz.
(5)
dengan e11 hingga enn adalah elemen dari matriks vektor eigen ez.
Kemudian vektor-vektor eigen dalam matriks ez disusun terurut mengecil berdasarkan nilai eigennya. Jadi vektor kolom pertama dari matriks ez akan mempunyai nilai eigen yang lebih besar daripada nilai eigen untuk vektor kolom berikutnya. Pengurutan ini bertujuan untuk memudahkan proses reduksi dimensi matriks transformasi. Matriks ez merupakan matriks transformasi yang akan memetakan kumpulan vektor zn menjadi kumpulan vektor yn didalam ruang eigen.
Kumpulan vektor yn dapat dihitung dengan menggunakan persamaan: (6)
dan dengan menggunakan kumpulan yn yang bersesuaian, kita dapat merekonstruksi vektor zn dengan menggunakan persamaan:
(7)
Rekonstruksi vektor zn dari kumpulan vektor yn dilakukan dengan menggunakan matriks transfromasi en. Vektor-vektor eigen yang terdapat dalam matriks ez, disusun berdasarkan probabilitas distribusi data, dari yang terbesar hingga yang terkecil. Akibatnya tidak seluruh vektor eigen dalam matriks en mempunyai pengaruh yang besar dalam proses rekonstruksi vektor zn. Untuk itu dilakukan reduksi terhadap dimensi matriks ez dengan hanya memilih principal
component atau komponen utamanya, yaitu vektor-vektor eigen yang mempunyai nilai eigen terbesar. Dalam
menentukan berapa banyak vektor eigen yang digunakan, dilakukan perhitungan berdasarkan proporsi kumulatif nilai eigenak sebagai berikut [12]:
(8)
Didefinisikan matriks wk sebagai matriks transformasi dengan dimensi yang sudah direduksi, dengan k vektor eigen pertama dari matriks ez.
(9)
dengan w11 hingga wnn adalah elemen dari matriks transformasi wk. Sehingga persamaan (6) menjadi seperti berikut:
(10)
Dan persamaan (7) menjadi:
(11)
Dengan tingkat kesalahan kuadrat rata-rata atau mean square error antara representasi data baru dengan representasi data lama, sebagai berikut:
(12)
Tingkat kesalahan di atas dapat diminimalkan dengan memilih k vektor eigen yang mempunyai nilai terbesar saja, hal ini menjadikan transformasi Karhunen-Loeve optimal dalam meminimalkan kesalahan rekonstruksi vektor-vektor baru [12].
Metode Perhitungan Jarak Terpendek pada Garis Ciri
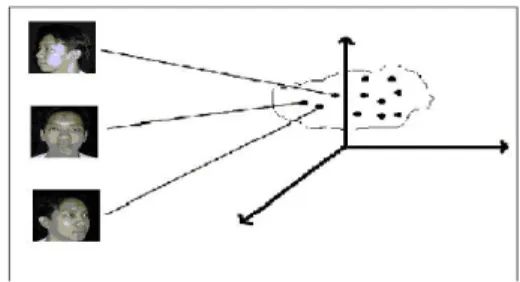
Sebuah obyek mempunyai banyak variasi pola yang dapat dijadikan dasar informasi untuk mengenali obyek tersebut. Dalam ruang ciri, sebuah pola atau ciri akan dipetakan sebagai sebuah titik dalam ruang tersebut (Gb.1). Berdasarkan hal tersebut, maka terdapat banyak kemungkinan variasi ciri yang dapat direpresentasikan dalam ruang ciri tersebut. Dalam representasi eigenspace atau ruang eigen, ciri-ciri dari suatu obyek dapat diperoleh dengan menggunakan persamaan (10) yang memetakan setiap citra acuan ke dalam ruang ciri. Hasil dari pemetaan yang dilakukan adalah titik-titik ciri dari obyek tersebut. Untuk menangkap lebih banyak variasi ciri dari sebuah obyek tiga dimensi, dapat dilakukan dengan menambah citra dua dimensi baru sebagai citra acuan untuk obyek tersebut. Pada kenyataannya tidak semua variasi ciri dari sebuah obyek dapat kita peroleh. Untuk memperoleh variasi ciri yang lebih banyak, dilakukan generalisasi titik-titik ciri menjadi garis ciri atau feature line yang menghubungkan antara dua buah titik ciri dalam kelas obyek yang sama.
Dalam representasi eigenspace atau ruang eigen, ciri-ciri dari suatu obyek dapat diperoleh dengan menggunakan persamaan (10) yang memetakan setiap
Gambar 1. Representasi sekumpulan citra obyek 3D
dengan sudut pandang yang berlainan dalam ruang eigen
citra acuan ke dalam ruang ciri. Hasil dari pemetaan yang dilakukan adalah titik-titik ciri dari obyek tersebut. Untuk menangkap lebih banyak variasi ciri dari sebuah obyek tiga dimensi, dapat dilakukan dengan menambah citra dua dimensi baru sebagai citra acuan untuk obyek tersebut. Pada kenyataannya tidak semua variasi ciri dari sebuah obyek dapat kita peroleh. Untuk memperoleh variasi ciri yang lebih banyak, dilakukan generalisasi titik-titik ciri menjadi garis ciri atau feature line yang menghubungkan antara dua buah titik ciri dalam kelas obyek yang sama.
Misalkan terdapat sekumpulan obyek kuda yang mempunyai berbagai macam kemungkinan sudut pandang dan variasi penampakan dalam ruang citra. Apabila sudut pandang obyek kuda itu kita ganti, maka akan banyak sekali variasi gambar kuda yang dapat kita peroleh, yang membuat titik ciri untuk obyek kuda tersebut menjadi semakin banyak. Untuk mempermudah proses pencarian sebuah titik baru dalam area titik acuan ini, variasi yang mungkin ada diantara
titik itu dapat diasumsikan berada dalam garis yang dibentuk dari dua buah titik. Garis ini dinamakan sebagai feature
line . Ini menyatakan bahwa untuk menambah basis data variasi yang mungkin ada, tidak diperlukan data baru.
Katakan kita mendapat dua buah titik acuan dalam ruang eigen dengan notasi titik x1 dan x2. Seperti tertera dalam Gb.2, kita dapat membentuk garis ciri untuk mencakup sejumlah titik variasi dari dua buah titik acuan tersebut. Apabila kita ingin mengetahui apakah sebuah titik baru x termasuk dalam variasi x1 dan x2, titik x diproyeksikan sebagai titik p, yang dapat dihitung berdasarkan persamaan :
(13)
denganm sebagai parameter posisi. Karena tegak lurus dengan , makam dapat dihitung sebagai dot product dari persamaan berikut:
(14)
Gambar 2. Generalisasi dari dua buah titik ciri x1 dan x2 sebagai sebuah garis ciri
Posisi dari titik proyeksi p dapat dilihat dari parameter posisim. Jika m=0, maka titik p akan sama dengan titik x1, jika m=1, maka titik p akan sama dengan titik x2. Jika maka titik p merupakan titik interpolasi antara kedua titik tersebut. Dan jika atau , maka titik p merupakan titik ekstrapolasi antara kedua titik tersebut. Banyaknya garis ciri Gc yang dapat diperoleh dari sebuah obyek, dapat dihitung dengan persamaan berikut:
(15)
dengan Nc adalah banyaknya titik ciri dalam sebuah kelas obyek.
Sistem Penentu Sudut Pandang Obyek 3D
Pengelompokkan sudut pandang dari obyek tiga dimensi dengan metode Perhitungan Jarak Terpendek dengan Garis Ciri dalam ruang eigen ini, seperti termaksud dalam namanya, dilakukan dengan mencari jarak terpendek dari titik ciri citra uji dengan garis ciri citra acuan. Akan tetapi karena kita menerapkan dua macam transformasi Karhunen-Loeve, yaitu
TK-LSELURUH dan TK-LSEBAGIAN, maka dalam pengambilan keputusan apakah sebuah citra uji ditentukan berada
dalam suatu kelas sudut pandangnya, akan berbeda untuk kedua metoda transformasi tersebut. Hal ini menyebabkan adanya dua kelompok data sudut pandang obyek, yaitu kelompok data sudut pandang obyek dengan menggunakan
TK-LSELURUH serta kelompok data sudut pandang obyek dengan menggunakan TK-LSEBAGIAN.
Penentuan Sudut Pandang Menggunakan
TK-LSELURUH
Algoritma yang dipergunakan untuk menentukan sebuah citra uji dengan menggunakan TK-LSeluruh adalah sebagai berikut :
1. Sebuah citra ditransformasikan ke dalam ruang ciri menjadi titik ciri x.
2. Bentuk seluruh kemungkinan garis ciri Gc dari sejumlah titik ciri dalam ruang eigen untuk setiap kelas sudut pandang. 3. Sebuah citra baru yang setelah dilakukan TK-L Seluruh menjadi titik x, diproyeksikan terhadap seluruh garis ciri Gc
dengan menggunakan Pers. 13, dan dinamakan sebagai titik p.
4. Hitung jarak antara titik x dan titik hasil proyeksi (p) dalam setiap ruang eigen dari masing-masing kelas sudut pandang
(16)
5. Mengambil jarak proyeksi xp antara titik ciri x dengan titik proyeksi p yang terkecil. Pengelompokkan titik ciri x dilakukan berdasarkan pertimbangan sebagai berikut :
¨ Jika x1 dan x2 merupakan titik ciri dengan sudut pandang a0, berarti titik ciri x masuk dalam satu kelas sudut pandang a0 tersebut.
¨ Jika x1 merupakan titik ciri dengan sudut pandang a0 dan x2 merupakan titik ciri dengan sudut pandang b0, berarti titik ciri x digolongkan sebagai titik di antara sudut a0 dan b0.
Penentuan Sudut Pandang Menggunakan
TK-LSEBAGIAN
Algoritma yang dipergunakan untuk menentukan sebuah citra uji dengan menggunakan TK-LSeluruh adalah sebagai berikut :
1. Sebuah citra ditransformasikan ke dalam ruang ciri menjadi titik ciri x. Pada citra acuan lain juga dilakukan proses transformasi K-L untuk membentuk ruang eigen berdasarkan sudut pandang.
2. Bentuk seluruh kemungkinan garis ciri Gc yang dapat dibentuk oleh sejumlah titik ciri dalam setiap ruang eigen berdasarkan sudut pandang.
3. Sebuah citra uji tidak dikenal, ditransformasikan terhadap seluruh ruang eigen yang ada, menjadi titik xi (i adalah kelas sudut pandang). Untuk ruang eigen sudut 00 citra akan akan menjadi titik x0, dan untuk ruang eigen lain didapatkan titik x30, titik x60.
4. Titik xi ini kemudian diproyeksikan terhadap seluruh garis ciri Gc dalam ruang eigen masing-masing menggunakan Pers. 13 sebagai titik p.
5. Hitung jarak antara titik xi dan titik proyeksi p untuk masing-masing ruang eigen, dengan menggunakan Pers. 16. Hasil yang didapat pada langkah ke-4 ini berupa jarak xipi
6. Tentukan xipi yang terkecil sebagai xr pr, dan gunakan untuk menentukan sudut pandang citra uji berdasarkan: a) Jika jarak xrpr yang didapat mendekati 0 berarti titik uji x yang diproyeksikan sebagai xr masuk ke dalam kelas
sudut pandang r.
b)Akan tetapi jika jarak xrpr ini jauh lebih besar dari 0 berarti titik uji x ini dikelompokkan : ¨ diantara kelas (r – t) dan r, atau
¨ diantara kelas r dan (r + t).
Apabila tahap 6a berlaku, maka proses berhenti, tetapi bila tahap 6b yang berlaku, maka proses dilanjutkan.
7. Hitung jarak proyeksi xr-tpr-t dan jarak proyeksi xr+t pr+t. Bandingkan jarak proyeksi xr-tpr-t dan xr+tpr+t. Jarak proyeksi yang terkecil dari kedua jarak proyeksi dari kelas sudut pandang diantaranya digunakan untuk menentukan keputusan terakhir, apakah titik ciri x masuk ke dalam kelas sudut pandang :
(r - t) dan r, atau r dan (r + t).
Hasil dan Pembahasan
Metodologi yang dikembangkan terdiri dari dua buah proses utama, yaitu tahap pembentukan garis ciri dalam ruang eigen dan tahap penentuan sudut pandang obyek baru. Pada tahap pembentukan ruang ciri, proses dilakukan dengan
membentuk ruang ciri dan ekstraksi ciri dari seluruh citra acuan untuk setiap sudut pandang. Sedangkan pada tahap pengenalan, proses dilakukan dengan memasukkan sejumlah citra uji dan sistim penenetu sudut pandang wajah 3D ini akan mengelompokkan citra masukan tersebut ke dalam kelas obyek yang sesuai.
Uji coba sistim penentu sudut pandang wajah 3D ini menggunakan data citra dari wajah manusia Indonesia dengan beberapa ekspresi yang berbeda seperti, wajar, tersenyum, tertawa dan ekspresi bebas. Seluruh citra wajah 3D ini didapatkan dari pengambilan sudut pandang yang berbeda untuk setiap obyek wajah, yaitu sudut pandang pengamatan mulai dari –900 hingga +900 dengan interval 150 untuk obyek wajah. Sebagian dari citra wajah yang dipergunakan dalam eksperimen ini tertera dalam Gb. 4.
Batasan umum dari data citra untuk obyek wajah adalah sudut pandang pengamatan dibatasi hanya pada arah horizontal saja dan jarak antara lokasi obyek dan pengamat dianggap tetap. Himpunan data citra obyek wajah manusia dapat dilihat pada Tabel 1. Percobaan dilakukan menggunakan paradigma perbandingan data pelatihan dan data pengujian yang berbeda. Seperti dapat dilihat pada Tabel 1, Data Set 1 mempunyai perbandingan antara sudut pandang pelatihan terhadap sudut pandang pengujian yang paling kecil, 30,8%:69,2%. Sedangkan Data Set 2 mempunyai perbandingan
38,5%:61,5% sedangkan Data Set 3
mempunyai perbandingan sebesar 53,8%:46,2%. Hal ini dilakukan supaya kita bisa mengukur kemampuan sistim untuk dapat menentukan posisi wajah seseorang apabila
Gambar 4. Sebahagian dari citra wajah 3D yang
dipergunakan dalam Sistim Pengenal Wajah. Himpunan citra ini juga menunjukkan perubahan ekspresi yang juga menjadi
parameter penentuan sudut pengamatan obyek wajah
Tabel 1. Data eksperimen untuk obyek wajah dengan perbandingan data pelatihan dan data pengenalan yang berbeda
kita mempunyai basisdata yang kecil (Data Set 1) yang berubah menjadi semakin membesar menjadi (Data Set 3). Tingkat keberhasilan sistem penentu sudut pandang wajah 3D terhadap kumpulan data-set seperti tertera dalam Tabel 1 ini dapat dilihat pada Tabel 2. Perlu diperhatikan bahwa hasil yang tertera dalam Tabel 2 ini adalah apabila kita menggunakan metoda TK-LSELURUH, hasil penggunaan metoda TK-LSEBAGIAN dapat dilihat dalam Tabel 3. Untuk semua percobaan dengan jelas terlihat bahwa berdasarkan nilai proporsi kumulatif yang berbeda, tingkat keberhasilan penentuan sudut pandang yang benarpun akan berbeda. Tingkat keberhasilan sistem cenderung meningkat sesuai dengan
peningkatan prosentase proporsi kumulatif yang dipergunakan. Untuk metoda TK-LSELURUH, himpunan Data Set 1 memperlihatkan peningkatan derajat keberhasilan sistem hingga mencapai 27.08% untuk prosentasi kumulatif sebesar
99%, sedangkan untuk untuk himpunan Data Set 2, tingkat keberhasilan sistim meningkat hingga mencapai 42,19%
untuk prosentasi kumulatif 95%. Untuk himpunan Data Set 3, tingkat keberhasilan sistim cenderung meningkat terus hingga proporsi kumulatif mencapai 99% dengan tingkat keberhasilan sebesar 57,50%.
Terlihat pula dari Tabel 2 ini bahwa dengan meningkatnya prosentase pelatihan dibandingkan dengan prosentase pengujiannya, maka tingkat keberhasilan sistem penentu sudut pandang wajah ini juga akan meningkat. Untuk Data Set
1 dan Data Set 2, perbandingan antara data pelatihan dan data pengujian tidak terlalu berbeda, maka perubahan diantara
keduanya juga tidak terlalu terlihat nyata. Akan tetapi, apabila kita melihat penggunaan prosentase data pelatihan dan data pengujian sekitar 50%:50% pada Data Set 3, maka tingkat keberhasilan sistem meningkat secara signifikan, walaupun masih sangat rendah.
Tabel 2. Tingkat keberhasilan Sistim Penentu Sudut Pandang Wajah 3D berdasarkan metoda TK-LSELURUH dengan prosentase proporsi kumulatif yang berbeda
Dengan menggunakan metoda TK-LSEBAGIAN, hasil eksperimen menunjukkan bahwa untuk himpunan Data Set 1, tingkat keberhasilan sistem sangat tinggi hingga mencapai 87,50% pada prosentasi kumulatif 99%, sedangkan untuk untuk himpunan Data Set 2, tingkat keberhasilan sistem meningkat hingga mencapai 89.1% pada prosentasi kumulatif
95%. Untuk himpunan Data set 3, tingkat keberhasilan sistem cenderung juga meningkat terus, dan pada nilai proporsi
kumulatif 95%, mencapai 93,8%.
Terlihat pula dari Tabel 3 ini, seperti juga pada Tabel 2, bahwa dengan meningkatnya prosentase pelatihan dibandingkan dengan prosentase pengujiannya, maka tingkat keberhasilan sistem penentu sudut pandang wajah ini juga akan meningkat. Tingkat pengenalan akan berkisar antara 89% apabila menggunakan prosentase kumulatif 99%.
Kesimpulan
Kita telah mengembangkan sistem penentu sudut pandang wajah 3D berdasarkan perhitungan jarak terpendek pada garis ciri di dalam ruang eigen. Sistem penentu sudut pandang wajah yang dikembangkan ini mampu mengenal wajah yang tidak diketahui sudut pandangnya, dengan tingkat keberhasilan tertinggi sekitar 93,8%, yaitu dengan perbandingan antara data pelatihan dan data uji sebesar 50%:50%. Apabila kita meningkatkan prosentase data pelatihan lebih tinggi lagi, maka diharapkan kita akan mampu mempertinggi tingkat pengenalan sistim. Terlihat pula dalam hasil eksperimen ini bahwa penggunaan transformasi Karhunen-Loeve sebagian data akan memberikan hasil
Tabel 3. Tingkat keberhasilan Sistem Penentu Sudut Pandang Wajah 3D berdasarkan metoda TK-LSEBAGIAN dengan prosentase proporsi kumulatif yang berbeda
yang lebih baik daripada apabila kita menggunakan transformasi Karhunen-Loeve seluruhnya. Hal ini disebabkan karena dalam TK-LSEBAGIAN, citra yang tidak diketahui sudut pandangnya akan diproyeksikan pada ruang eigen terdekat, yang akan menghasilkan jarak terpendek terkecil. Nilai jarak terpendek ini akan membesar apabila citra tak dikenal ini di proyeksikan pada ruang eigen yang lebih jauh.
Ucapan Terima Kasih
Para penulis menyatakan rasa terimaksih terhadap Lembaga Penelitian Universitas Indonesia, atas pembiayaan penelitian ini melalui Pendanaan Riset Unggulan UI 2000-2001.
Daftar Acuan
[1] R. Brunelli, T. Poggio, Proceedings of ECCV 92, Santa Margherita Ligure, 1992, p. 792. [2] I. Craw, D. Tock, A. Bennet, Proceedings of ECCV 92, Santa Margherita Ligure, 1992, p. 93. [3] M. Kirby, L. Sirovich, IEEE Trans PAMI 12 (1990) 103.
[4] M. Turk, A. Pertland, Proc. IEEE CCVP’91, 1991, p. 586. [5] B. Kusumoputro, R. F. Shah, Proc. IECI CECI-(2001) 20.
[6] B. Kusumoputro, Renny Isharini, A. Murni, Proc. IECI CECI-2001, VI (2001) 24. [7] B. Kusumoputro, I. P. Simanjubtak, Proc. IECI CECI-2001, VI (2001) 16. [8] S. Ullmann, R. Basri, IEEE Trans. PAMI, 13 (1991) 992.
[9] T. Poggio, S. Edelman, Nature, 343 (1990) 263.
[10] B. Kusumoputro, A. Sulita, Neural Network World, 4 (2000) 631.
[11] B. Kusumoputro, M. Y. Pangabean, L. F. Rachman, Jurnal Ilmu Komputer dan Teknologi Informasi, 1 (2001). [12] S.Z. Li, J. Lu, IEEE Trans. on neural networks 1999.
[13] S. Chandrasekaran et.al. , Dept. of Electrical and Computer Engineering, The University of California, Santa Barbara, 1997.
[14] L.T. Jolliffe, Springer-Verlaag, Berlin, 1986.
[15] M. Uenohara, T. Kanade,” IEEE Trans PAMI, vol 19, no. 8, pp. 891-897, 1997.
[16] S.Z. Li, J. Lu, IEEE Proc. On International Conference on Face and Gesture Recognition, Nara, Japan, 1998. [17] T. Vetter, T. Poggio, H. Bulthoff, A.I. Memo No. 1409, Artificial Intelligence Laboratory, Massachussetts Institute