113
HASIL DAN ANALISA
4.1 Hasil Perancangan
Hasil perancangan pada sistem ini terbagi menjadi tiga bagian, yaitu hasil perancangan quadrotor, embedded system dan ground control.
4.1.1 Hasil Perancangan Quadrotor
Pada gambar 4.1 dibawah ini merupakan hasil perancangan quadrotor. Hasil perancangan terdiri dari frame, 4 buah motor, 4 buah propeller, 4 buah ESC,
distribution board 12V, distribution board 5V, Arduino, Sensor IMU, XBee dan
baterai LiPo.
Distirbution board 12V digunakan untuk memudahkan pembagian sumber
tegangan ke masing-masing ESC. Pemasangan distribution board 12V dapat dilihat pada gambar 4.2
Gambar 4.2 Quadrotor dan distribution board 12V
ESC yang digunakan pada perancangan ini masing-masing memiliki internal BEC (Battery Eliminator Circuit) dengan spesifikasi 5V 1A. Sumber tegangan 5V tersebut didistribusikan secara parallel ke distribution board 5V.
Distribution board 5V digunakan untuk memudahkan pembagian tenaga pada
modul-modul elektronik dengan tegangan kerja 5V, seperti Arduino, sensor IMU dan XBee.
Gambar 4.3 IMU, Arduino dan ditribution board 5V
4.1.2 Hasil Perancangan Ground control
Pada gambar 4.5 merupakan sistem kontrol quadrotor secara keseluruhan. PC/Laptop dikoneksikan dengan XBee untuk komunikasi dengan quadrotor dan Xbox joystick digunakan sebagai input.
Gambar 4.5 Ground control dan quadrotor secara keseluruhan
Ground control pada menu utama, merupakan GUI dashboard kontrol
quadrotor. Pada menu ini informasi yang dapat diberikan secara realtime, yaitu : 1. Sudut kemiringan quadrotor
2. Arah kompas quadrotor 3. Informasi input joystick 4. Informasi input PWM motor 5. Suhu ruangan pada quadrotor 6. Ketinggian quadrotor
Gambar 4.6 Ground control menu utama
Menu konfigurasi merupakan GUI untuk konfigurasi kontrol PID dan konfigurasi karakteristik input joystick. Konfigurasi pada menu ini meliputi
1. Kontrol PI-D
a. Kontrol PI-D Yaw b. Kontrol PI-D Pitch c. Kontrol PI-D Roll d. Kontrol PI-D Sudut e. Kontrol PI-D Altitude 2. Karakteristik Input
a. Pitch/Roll Rate b. Yaw Rate
c. Ekponsensial Input Throttle d. Exponensial Input Pitch dan Roll
3. Throttle minimun, maksimun dan throttle hover
Gambar 4.7 Ground control menu konfigurasi
Pada menu controller, merupakan GUI untuk konfigurasi, kalibrasi dan penempatan input joystick.
Menu monitoring merupakan GUI yang menampilkan informasi data-data quadrotor yang disajikan dalam bentuk grafik secara realtime. Adapun data yang ditampilkan adalah:
1. Tiga sumbu accelerometer (x, y, z) yang sudah/belum dikalibrasi 2. Tiga sumbu gyroscope (x, y, z) yang sudah/belum dikalibrasi 3. Tiga sumbu magnetometer (x, y, z) yang sudah/belum dikalibrasi 4. Posisi sudut quadrotor (ѱ, θ, ϕ)
5. Quaternion (w, x, y, z)
6. Tekanan udara, suhu udara dan posisi ketinggian 7. PWM Motor (M1, M2, M3, M4)
Gambar 4.9 Ground control menu monitoring
Menu kalibrasi merupakan GUI yang digunakan untuk konfigurasi offset orientasi pada quadrotor, konfigurasi offset ketinggian dan juga memudahkan kalibrasi sensor accelerometer, gyroscope, magnetometer dan barometer.
Gambar 4.10 Ground control menu kalibrasi 4.2 Pengujian Mekanik
Pengujian mekanik dibagi menjadi dua, yaitu pengujian berat keseluruhan dan pengujian gaya angkat. Pengujian ini saling berkaitan dan bertujuan untuk: 1. Mengetahui quadrotor dapat terbang atau tidak
2. Mengetahui titik input throttle dimana quadrotor akan naik, turun dan melayang 3. Sebagai acuan untuk konfigurasi karakteristik input throttle (throttle expo) 4. Mengetahui kapasitas payload yang dapat digunakan
4.2.1 Pengujian Berat
Quadrotor diuji beratnya tanpa baterai, hal ini bertujuan untuk mengetahui berapa maksimal payload yang dapat digunakan. Pada gambar 4.11 menunjukan berat kosong quadrotor (tanpa payload) sebesar 339 gram.
Gambar 4.11 Berat kosong quadrotor
Payload pada penelitian ini hanya menggunakan satu payload, yaitu baterai.
Hasil pengujian berat baterai adalah 120 gram.
Gambar 4.12 Berat baterai
Berat keseluruhan atau AUW (All up weight) adalah berat kosong quadorotor ditambah payload. Pada pengujian ini berat keseluruhan quadrotor adalah 459 gram seperti pada gambar 4.13.
4.2.2 Pengujian Gaya Angkat
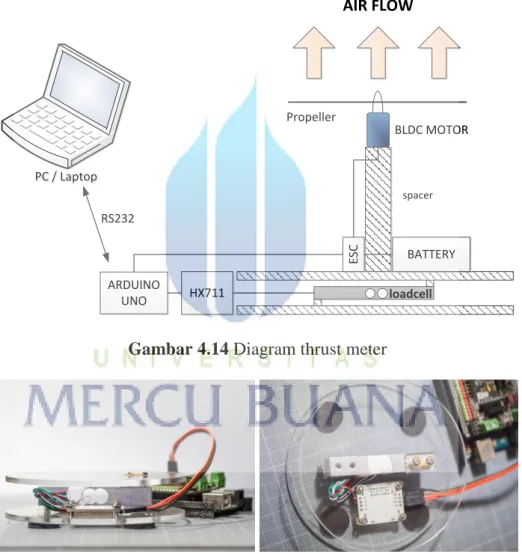
Untuk memudahkan pengambilan data pada pengujian gaya angkat, penulis menggunakan loadcell dan Arduino sebagai thrust meter. Pengujian gaya angkat dilakukan dengan cara menempatkan motor dengan propeller diatas loadcell dengan diberikan ruang. Kemudian motor diaktifkan untuk mendapat gaya dorong terhadap loadcell, seperti pada gambar dibawah ini.
ES C ARDUINO UNO HX711 BATTERY BLDC MOTOR Propeller PC / Laptop PC / Laptop RS232 spacer loadcell AIR FLOW
Gambar 4.14 Diagram thrust meter
Gambar 4.16 Pemasangan motor dan propeller pada loadcell
Sebelum dilakukan pengujian, motor, ESC dan baterai diposisikan seperti pada gambar 4.16, kemudian loadcell dikalibrasi ulang agar mendapatkan titik nol sebagai pembacaan awal. Kemudian pengujian dilakukan dengan input throttle dari 900 sampai 2000, dengan kenaikan sebesar 100 setiap 3 detik. Hasil pengujian ini disajikan pada gambar 4.17.
Gambar 4.17 Pengujian thrust terhadap throttle input
900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 Thrust 0 13 29 48 67 86 111 139 169 207 241 262 0 50 100 150 200 250 300 Th ru st (g ram ) Throttle Input
Percobaan ini menggunakan tegangan berkisar 12Volt mendapatkan gaya angkat maksimum sebesar 262 gram per aktuator. Karena quadrotor memiliki empat aktuator, dengan mengabaikan rugi-rugi maka gaya angkat maksimum adalah 1049. Berat quadrotor AUW adalah 459 gram, berat ini merupakan titik dimana quadrotor melayang (graviasi bumi sama dengan nol).
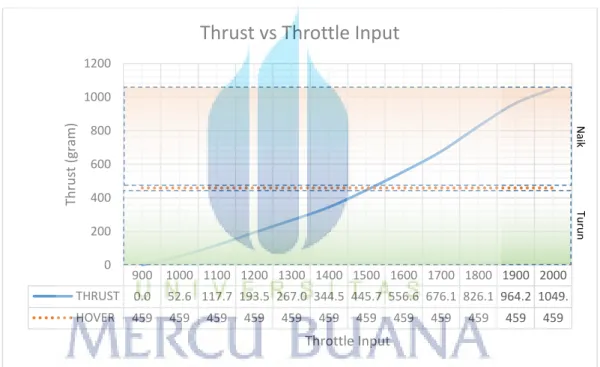
Karakteristik quadrotor terhadap input throttle dapat diprediksi dengan menggunakan hasil dari pengujian berat dan pengujian gaya angkat seperti pada gambar yang disajikan dibawah ini.
Gambar 4.18 Ilustrasi throttle input terhadap thrust dengan 4 motor
Pada gambar 4.18 menujukan input throttle 900 s/d 1499 mempunyai karakteristik quadrotor untuk menurunkan ketinggian. Input throttle 1500 untuk karakteristik melayang dan input throttle 1501 s/d 2000 untuk karakteristik quadrotor menaikan ketinggian.
900 1000 1100 1200 1300 1400 1500 1600 1700 1800 1900 2000 THRUST 0.0 52.6 117.7 193.5 267.0 344.5 445.7 556.6 676.1 826.1 964.2 1049. HOVER 459 459 459 459 459 459 459 459 459 459 459 459 0 200 400 600 800 1000 1200 Th ru st (gram ) Throttle Input
Thrust vs Throttle Input
N
ai
k
Tur
Berdasarkan pengujian ini maka rasio gaya angkat terhadap berat quadrotor adalah 1:3.09 untuk berat kosong dan 1:2.21 untuk berat penuh. Dengan demikian gaya angkat total tersebut mampu mengangkat quadrotor.
4.3 Pengujian Komunikasi Paket Data
Komunikasi data merupakan bagian yang paling penting pada quadrotor, karena berkaitan dengan input kendali, monitoring dan konfigurasi pada quadrotor. Pengujian komunikasi paket data dengan cara merekam komunikasi komputer sebagai host dengan quadrotor. Pengukuran kualitas paket data dilakukan dengan menghitung akumulasi XOR dan mencocokan checksum-nya. Sebagai perbandingan, pengujian juga dilakukan dengan kabel data.
4.3.1 Pengujian Komunikasi Paket Data dengan FTDI
Pengujian komunikasi paket data dilakukan dengan data request DMP dengan frekuensi 20Hz, 50Hz dan 100Hz.
Gambar 4.19 Komunikasi DMP request dan response 20Hz (FTDI) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Response 684 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 720 288 Request 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 48 0 100 200 300 400 500 600 700 800 900 B yte Time (s)
DMP Request & Response - 20Hz (FTDI)
Gambar 4.20 Komunikasi DMP request dan response 50Hz (FTDI)
Gambar 4.21 Komunikasi DMP request dan response 100Hz (FTDI)
Dari hasil pengujian ini (gambar 4.19-4.21) menunjukan bahwa komunikasi data dengan frekuensi 50Hz dan 100Hz request data dan response data menjadi tidak stabil, sedangkan frekuensi 20Hz masih cukup stabil.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Response 1764 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 1800 972 Request 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 168 0 500 1000 1500 2000 2500 B yte Time (s)
DMP Request & Response 50 Hz (FTDI)
Request Response 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Response 2052 2052 2304 2304 2124 1908 2304 1872 2304 2124 2232 2232 2268 2304 2196 2304 2304 2124 2196 2232 1224 Request 348 342 384 384 354 318 384 312 384 354 372 372 378 384 366 384 384 354 366 372 210 0 500 1000 1500 2000 2500 3000 B yte Time (s)
DMP Request & Response 100 Hz (FTDI)
Gambar 4.22 Komunikasi dengan kombinasi paket data (FTDI)
Gambar 4.22 adalah pengujian dengan request beberapa jenis paket data dengan frekuensi yang berbeda. Dari pengujian tersebut dapat menunjukan bahwa komunikasi akan jenuh jika dengan request satu jenis paket data dengan bandwidth diatas 2 KB/s dan juga dengan request beberapa jenis paket bandwidth diatas 1.4 KB/s.
4.3.2 Pengujian Komunikasi Paket Data dengan XBee
Pengujian komunikasi paket data dilakukan dengan data request DMP dengan frekuensi 20Hz, 50Hz dan 100Hz.
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Motor - Response 126 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 140 Motor - Request 54 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 Altitude - Response 104 130 104 130 156 130 130 130 130 130 130 130 130 130 104 156 104 156 130 130 104 Altitude - Request 24 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 30 Attitude - Response 252 252 270 270 288 252 288 270 252 270 270 270 270 270 270 270 252 270 288 270 252 Attitude - Request 90 84 84 90 96 84 90 90 90 90 90 84 90 90 90 90 84 96 90 84 90 DMP - Response 684 720 684 720 756 720 684 720 756 720 684 720 720 720 684 756 684 756 720 684 720 DMP - Request 114 120 120 120 120 120 120 120 120 120 120 120 114 120 120 120 120 120 120 120 114 0 200 400 600 800 1000 1200 1400 1600 1800 B yte Time (s)
Gambar 4.23 Komunikasi DMP request dan response 20Hz (XBee)
Gambar 4.24 Komunikasi DMP request dan response 50Hz (XBee)
Gambar 4.25 Komunikasi DMP request dan response 100Hz (XBee)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Error 78 33 Response 684 720 720 468 576 684 756 720 720 720 720 720 720 720 720 720 720 720 720 684 756 Request 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 120 0 200 400 600 800 1000 Byt e Time (s)
DMP Request & Response 20 Hz (XBee)
Request Response Error
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Error 200 293 217 270 346 184 281 210 207 277 262 287 263 171 198 145 246 21 148 123 20 Response 432 216 324 252 216 576 216 432 396 108 360 360 468 216 540 576 324 792 648 936 1116 Request 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 300 0 500 1000 1500 2000 Byt e Time (s)
DMP Request & Response 50 Hz (XBee)
Request Response Error
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Error 215 302 230 118 148 318 114 187 275 276 118 61 90 88 59 55 146 125 87 101 179 Response 1290 600 768 1056 1212 744 1026 768 732 468 978 1176 1308 1248 1428 1464 1032 1104 1176 1380 1200 Request 936 216 396 684 828 360 648 396 360 108 612 792 936 864 1044 1080 648 720 792 1008 864 0 500 1000 1500 2000 2500 3000 B yte Time (s)
DMP Request & Response 100 Hz (XBee)
Dari hasil pengujian ini (gambar 4.23-4.25) request data dan response data dengan frekuensi 20Hz cukup stabil, sedangkan pengujian dengan frekuensi 50Hz dan 100Hz menjadi tidak stabil.
Gambar 4.26 Komunikasi dengan kombinasi paket data (Xbee)
Dari pengujian ini dapat disimpukan bahwa komunikasi akan jenuh jika dengan request satu jenis paket data dengan bandwidth diatas 0.8 KB/s dan juga dengan request beberapa jenis paket bandwidth diatas 1.5 KB/s.
4.4 Pengujian Sensor
Untuk memudahkan pengujian, secara keseluruhan pengujian sensor dilakukan dengan cara menyimpan data gerakan ke komputer berupa data binary file. Kemudian data binary file tersebut dibuka dan diproses dengan aplikasi
0 500 1000 1500 2000 2500 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Error 215 302 230 118 148 318 114 187 275 276 118 61 90 88 59 55 146 125 87 101 179 Set RC Input 700 700 700 700 700 686 686 728 700 700 700 700 700 686 714 700 672 728 686 714 700 Motor Response 84 42 98 70 42 126 70 98 98 112 84 98 98 126 70 98 70 84 98 70 70 Motor Request 54 60 60 60 60 60 54 66 60 60 60 60 60 60 60 60 54 66 60 60 60 Altitude Response 52 52 104 78 26 130 78 104 52 130 104 104 52 104 104 130 52 78 52 78 78 Altitude Request 24 30 30 30 30 30 24 36 30 30 30 30 30 30 30 30 24 36 30 30 30 Attitude Response 126 54 108 72 36 162 72 144 108 144 108 126 90 126 108 126 72 108 90 126 72 Attitude Request 54 60 60 60 60 60 54 66 60 60 60 60 60 60 60 60 54 66 60 60 60 DMP Response 324 468 360 684 540 324 612 432 468 504 468 576 468 504 576 576 576 612 612 576 612 DMP Request 114 120 120 120 120 120 114 126 120 120 120 120 120 120 120 120 114 126 120 120 120 B yt e
Time (s)
komputer yang sesuai dengan masing-masing jenis pengujian dan hasil pengujian tersebut diekspor menjadi file spreadsheet dengan format comma-separated values (CSV). Alur dari proses tersebut dapat dilihat pada gambar sebagai berikut:
Binary file Simpan data
DMP data & Raw data
FTDI / RS232 START END 01010 01101 00101 01010 01101 00101
Gambar 4.27 Alur proses penyimpanan data sensor
CSV file Proses Pengujian Hasil Proses Binary File Baca stream START END 01010 01101 00101
Gambar 4.28 Alur proses untuk pengujian sensor dengan metode offline
4.4.1 Pengujian Accelerometer
Pengujian accelerometer dilakukan dengan cara melakukan orientasi masing-masing sumbu terhadap gravitasi bumi. Dan kemudian dilanjutkan pengujian dengan beberapa gerakan.
Pengujian dengan masing-masing sumbu dengan orientasi terhadap gravitasi bumi untuk mendapatkan nilai maksimum dan minimum dalam satuan 1G (1 gravitasi = 9,8m/s2).
4.4.1.1 Orientasi Accelerometer Sumbu X Terhadap Gravitasi Bumi
Pada pengujian ini, bertujuan untuk mengetahui keakuratan sensor
accelerometer sumbu x terhadap nilai minimum dan maksimum. Pengambilan data
ini melibatkan 2 kali pengambilan data setiap cupliknya, yaitu pengambilan data DMP dan data Raw. Pada gambar 4.29, merupakan penempatan posisi IMU terhadap sumbu x minimum, sumbu x accelerometer tegak lurus menghadap keatas berlawanan dengan arah gravitasi sehingga mendapatkan nilai x minimum.
X
Y Z
G R O U N D
Gambar 4.29 Orientasi accelerometer sumbu x minimum terhadap gravitasi bumi
Gambar 4.30 merupakan hasil pengujian sensor accelerometer sumbu x minimum terhadap gravitasi, penyimpangan absolut rata-rata accelerometer sumbu x DMP dan raw masing-masing 0.000464G (0.004552 𝑚 𝑠⁄ ) dan 0.001297G 2 (0.012720 𝑚 𝑠⁄ ). 2
Gambar 4.30 Accelerometer sumbu x minimum terhadap gravitasi bumi
Pada gambar 4.31, merupakan penempatan posisi IMU terhadap sumbu x maksmum, sumbu x accelerometer tegak lurus menghadap kebawah searah dengan arah gravitasi bumi sehingga mendapatkan nilai x maksimum.
X
Y Z
G R O U N D
Gambar 4.31 Orientasi accelerometer sumbu x maksimum terhadap gravitasi
bumi -1.0150 -1.0100 -1.0050 -1.0000 -0.9950 -0.9900 -0.9850 0 3125 6250 9316 12360 15487 18631 G rav itas i Waktu (ms)
DMP ACC X vs IMU ACC X
Gambar 4.32 Accelerometer sumbu x maksimum terhadap gravitasi bumi
Pengujian accelerometer untuk sumbu X maksimum dapat dilihat pada gambar 4.32, hasil pengujian menunjukan bahwa hasil pengukuran dengan DMP dan raw masing-masing memiliki penyimpangan absolut rata-rata sebesar 0.000753G (0.007386 𝑚 𝑠⁄ ) dan 0.001715G (0.016816 𝑚 𝑠2 ⁄ ). 2
4.4.1.2 Orientasi Accelerometer Sumbu Y Terhadap Gravitasi Bumi
Pada pengujian ini sama halnya dengan pengujian accelerometer sumbu x, namun yang membedakan adalah oritentasinya.
Pada gambar 4.33 merupakan pengujian untuk sumbu y minimum, dimana sumbu y accelerometer tegak lurus menghadap keatas dan berlawanan dengan arah gravitasi bumi. 0.9800 0.9850 0.9900 0.9950 1.0000 1.0050 1.0100 0 3125 6251 9376 12501 15647 18771 G rav itas i Waktu (ms)
DMP ACC X vs IMU ACC X
Y
Z X
G R O U N D
Gambar 4.33 Orientasi accelerometer sumbu y minimum terhadap gravitasi bumi
Gambar 4.34 merupakan hasil pengujian sensor accelerometer sumbu y minimum terhadap gravitasi, penyimpangan absolut rata-rata accelerometer sumbu y DMP dan raw masing-masing 0.000505G (0.001340 𝑚 𝑠⁄ ) dan 0.004956G 2 (0.013145 𝑚 𝑠⁄ ). 2
Gambar 4.34 Accelerometer sumbu y minimum terhadap gravitasi bumi
Pada gambar 4.35, merupakan penempatan posisi IMU terhadap sumbu y maksmum, sumbu y accelerometer tegak lurus menghadap kebawah searah dengan arah gravitasi bumi sehingga mendapatkan nilai y maksimum.
-1.0100 -1.0050 -1.0000 -0.9950 -0.9900 -0.9850 -0.9800 0 3126 6251 9376 12521 15647 G rav itas i Waktu (ms)
DMP ACC Y vs IMU ACC Y
Y
Z X
G R O U N D
Gambar 4.35 Orientasi accelerometer sumbu y maksimum terhadap gravitasi
bumi
Gambar 4.36 Accelerometer sumbu y maksimum terhadap gravitasi bumi
Pengujian accelerometer untuk sumbu y maksimum dapat dilihat pada gambar 4.32, hasil pengujian menunjukan bahwa hasil pengukuran dengan DMP
0.9850 0.9900 0.9950 1.0000 1.0050 1.0100 0 3126 6251 9376 12521 15647 G rav itas i Waktu (ms)
DMP ACC Y vs IMU ACC Y
dan raw masing-masing memiliki penyimpangan absolut rata-rata sebesar 0.000678G (0.006651 𝑚 𝑠⁄ ) dan 0.001568 G (0.015380 𝑚 𝑠2 ⁄ ). 2
4.4.1.3 Orientasi Accelerometer Sumbu Z Terhadap Gravitasi Bumi
Pada pengujian ini sama halnya dengan pengujian accelerometer sumbu y, pada gambar 4.37 merupakan pengujian untuk sumbu z minimum, dimana sumbu z accelerometer tegak lurus menghadap keatas dan berlawanan dengan arah gravitasi bumi.
Y
Z
X
G R O U N D
Gambar 4.37 Orientasi accelerometer sumbu z minimum terhadap gravitasi bumi
Gambar 4.38 merupakan hasil pengujian sensor accelerometer sumbu z minimum terhadap gravitasi, penyimpangan absolut rata-rata accelerometer sumbu z DMP dan raw masing-masing 0.000828G (0.008115 𝑚 𝑠⁄ ) dan 0.001969G 2 (0.019304 𝑚 𝑠⁄ ). 2
Gambar 4.38 Accelerometer sumbu z minimum terhadap gravitasi bumi
Pada gambar 4.39, merupakan penempatan posisi IMU terhadap sumbu z maksmum, sumbu z accelerometer tegak lurus menghadap kebawah searah dengan arah gravitasi bumi sehingga mendapatkan nilai z maksimum.
Z X
G R O U N D
Gambar 4.39 Orientasi accelerometer sumbu z maksimum terhadap gravitasi
bumi
Pengujian accelerometer untuk sumbu z maksimum dapat dilihat pada gambar 4.40, hasil pengujian menunjukan bahwa hasil pengukuran dengan DMP
-1.0100 -1.0050 -1.0000 -0.9950 -0.9900 -0.9850 -0.9800 0 3125 6250 9375 12501 15646 18771 G rav itas i Waktu (ms)
DMP ACC Z vs IMU ACC Z
dan raw masing-masing memiliki penyimpangan absolut rata-rata sebesar 0.252550G (2.476636 𝑚 𝑠⁄ ) dan 0.737364 G (7.230957 𝑚 𝑠2 ⁄ ). 2
Gambar 4.40 Accelerometer sumbu z maksimum terhadap gravitasi bumi
4.4.1.4 Pengujian Respon Accelerometer
Pengujian respon accelerometer dilakukan dengan gerakan acak yang dimulai dari gerakan pada sudut yaw, pitch dan roll. Data DMP dan Raw diambil setiap cupliknya dan disimpan ke bentuk file binary. Data binary ini nantinya digunakan untuk pengujian respon gyroscope dan AHRS pada sub bab selanjutnya.
Gambar 4.41-4.43 adalah grafik hasil percobaan dari gerakan sudut yaw,
pitch dan roll untuk masing-masing sumbu x, y dan z. Seperti yang dapat dilihat
bahwa respon untuk masing-masing sumbu accelerometer cukup responsif dan tidak dirasakan delay/lagging.
0.9750 0.9800 0.9850 0.9900 0.9950 1.0000 1.0050 1.0100 1.0150 1.0200 0 3126 6251 9376 12501 15627 18771 G rav itas i Waktu (ms)
DMP ACC Z vs IMU ACC Z
Gambar 4.41 Pengujian respon accelerometer pada sumbu x
Gambar 4.42 Pengujian respon accelerometer pada sumbu y
-1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 2540 10520 18499 26480 G rav itas i Waktu (ms)
DMP ACC X vs RAW ACC X
DMP Acc X Raw Acc X
Gerakan Yaw Gerakan Pitch Gerakan Roll
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 2540 10520 18499 26480 G rav itas i Waktu (ms)
DMP ACC Y vs RAW ACC Y
DMP Acc Y Raw Acc Y
Gerakan Pitch
Gambar 4.43 Pengujian respon accelerometer pada sumbu z
Dari hasil pengujian, menunjukan bahwa derau pengukuran accelerometer dari DMP lebih kecil daripada derau yang dengan pengukuran accelerometer secara langsung. Hal ini dikarenakan DMP memiliki internal filter, sedangkan data yang diperoleh dari Raw accelerometer belum difilter.
4.4.2 Pengujian Gyroscope
Untuk memudahkan pengukuran kecepatan angular pada gyroscope, rotary
encoder digunakan sebagai pembanding. Rotary encoder memiliki lubang
sebanyak 36, setiap lubang dihitung 10 derajat. Alat pengukuran ini dirancang seperti pada gambar 4.44 dan realisasinya disajikan pada gambar 4.45.
0 0.2 0.4 0.6 0.8 1 1.2 2540 10520 18499 26480 G rav itas i Waktu (ms)
DMP ACC Z vs RAW ACC Z
DMP Acc Z Raw Acc Z
Gerakan Pitch
ARDUINO UNO Bearing Shaft Encoder Disk Encoder Sensor PC / Laptop PC / Laptop RS232
Gambar 4.44 Diagram rotary encoder
Gambar 4.45 Rotary encoder sebagai pengukur kecepatan angular
Pengujian dan pengambilan data pengukuran dilakukan dengan cara memberikan kecepatan putar pada meja rotary secara manual, kemudian didiamkan beberapa detik sampai meja rotary berhenti. Pengambilan data dilakukan setiap satu detik. Karena pengujian ini mengharuskan menggunakan dua system yang berbeda (rotary encoder dan quadrotor), maka diperlukan proses penggabungan data.
Penggabungan data dilakukan dengan menggunakan komputer, yaitu memberikan
timestamp yang sama ketika kedua data tersebut diterima.
4.4.2.1 Pengujian Gyroscope Sumbu X
Pengujian gyroscope pada sumbu x, quadrotor ditempatkan dengan orientasi sumbu x sebagai seperti pada gambar 4.46.
Gambar 4.46 Pengukuran gyroscope sumbu x dengan rotary encoder
Gambar 4.47 Kecepatan angular gyroscope sumbu x vs rotary encoder
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 DMP Gyro X -1 -1 198 181 170 150 145 119 117 112 86 75 76 62 31 -2 Raw Gyro X -1 -1 197 180 169 150 144 119 116 112 85 74 76 62 30 -3 Rotary Encoder 0 0 170 180 160 140 140 110 120 100 80 70 70 60 25 0 -50 0 50 100 150 200 250 K ece p ara n Angu lar (d eraja t / d etik) Waktu (detik)
Berdasarkan Gambar 4.47, pengujian gyroscope pada sumbu X pengukuran
gyroscope dengan DMP dan pengukuran gyroscope Raw hampir sama, Sedangkan
jika dibandingkan dengan rotary encoder, gyroscope DMP dan Raw masing-masing mempunyai penyimpangan absolut rata-rata sebesar 6.73°/s dan 6.32°/s
4.4.2.2 Pengujian Gyroscope Sumbu Y
Pengujian gyroscope pada sumbu y, quadrotor ditempatkan dengan orientasi sumbu y sebagai seperti pada gambar 4.48.
Gambar 4.48 Pengukuran gyroscope sumbu y dengan rotary encoder
Gambar 4.49 Kecepatan angular gyroscope sumbu y vs rotary encoder 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 DMP Gyro Y 1 1 1 -2 39 37 34 32 29 28 26 23 22 20 18 18 15 14 13 10 11 10 61 47 57 66 64 43 Raw Gyro Y 7 7 7 -1 40 37 35 32 30 28 27 24 22 21 18 18 15 15 14 11 11 10 68 54 63 73 71 49 Rotary Encoder 0 0 0 40 40 36 35 32 29 27 26 21 22 21 19 18 14 14 14 11 11 10 60 50 60 60 70 50 -100 0 100 200 300 400 500 K ece p ara n Angu lar (d eraja t / d etik) Waktu (detik)
Berdasarkan Gambar 4.49, pengujian gyroscope pada sumbu y dengan
rotary encoder, DMP dan Raw masing-masing memiliki penyimpangan absolut
rata-rata sebesar 7.34°/s dan 9.90°/s
4.4.2.3 Pengujian Gyroscope Sumbu Z
Pengujian gyroscope pada sumbu z, quadrotor ditempatkan dengan orientasi sumbu z sebagai seperti pada gambar 4.50.
Gambar 4.50 Pengukuran gyroscope sumbu z dengan rotary encoder
Gambar 4.51 Kecepatan angular gyroscope sumbu z vs rotary encoder 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 DMP Gyro Z 0 -4 -3 5 3 602 620 591 560 537 512 493 473 451 435 421 406 390 375 362 348 Raw Gyro Z 0 -4 -2 5 3 609 619 590 560 537 512 492 473 450 434 420 405 390 375 361 349 Rotary Encoder 0 0 0 0 0 615 602 599 580 540 530 490 480 460 440 430 410 390 380 370 350 -100 0 100 200 300 400 500 600 700 K ece p at an an gular (de raja t/d etik) Waktu (detik)
Berdasarkan Gambar 4.51, pengujian gyroscope pada sumbu Z dengan rotary encoder, DMP dan Raw masing-masing memiliki penyimpangan absolut rata-rata sebesar 6.69°/s dan 6.52°/s
4.4.2.4 Pengujian Respon Gyroscope
Pengujian respon sensor gyroscope menggunakan data gerakan yang sama dengan pengujian respon accelerometer. Hasil pengujian disajikan pada gambar dibawah ini.
Gambar 4.52 Respon gyroscope sumbu x
-300 -200 -100 0 100 200 300 2540 10520 18499 26480 K ece p at an Sud u t (de raja t/d etik) Waktu (ms)
DMP Gyro X vs RAW Gyro X
DMP Gyro X Raw Gyro X
Gambar 4.53 Respon gyroscope sumbu y
Gambar 4.54 Respon gyroscope sumbu z
-400 -300 -200 -100 0 100 200 300 2540 10520 18499 26480 K ece p at an Sud u t (de raja t/d etik) Waktu (ms)
DMP Gyro Y vs RAW Gyro Y
DMP Gyro Y Raw Gyro Y
Gerakan Yaw Gerakan Pitch Gerakan Roll
-300 -200 -100 0 100 200 300 2540 10520 18499 26480 K ece p at an Sud u t (de raja t/d etik) Waktu (ms)
DMP Gyro Z vs RAW Gyro Z
DMP Gyro Z Raw Gyro Z
Berdasarkan pengujian ini, pengukuran respon gyroscope dengan DMP tidak berbeda jauh dengan pengukuran Raw.
4.4.3 Pengujian Sensor Magnetometer
Pengujian sensor magnetometer menggunakan kompas analog sebagai referensi. Untuk memudahkan pengukuran, busur lingkaran digunakan dan disesuaikan posisi 0° pada arah kutub Utara kompas analog.
Gambar 4.55 Pengujian kompas analog dengan sensor magnetometer
Setelah posisi busur disesuaikan dengan kompas, sensor magnetometer ditempatkan diatas busur lingkaran dan diarahkan menghadap sudut 0° lalu diikuti dengan perubahan arah sensor sebesar 20° searah jarum jam. Pengujian dilakukan dengan setiap perubahan sudut ditahan selama ±10 detik dan data sensor dibaca dengan frekuensi 50 Hz. Grafik dibawah ini merupakan nilai rata-rata dari data sampel yang diambil.
Gambar 4.56 Pengujian kompas analog dengan sensor magnetometer -60° 0° 60° 120° 180° 240° 300° 360° 0° 60° 120° 180° 240° 300° 360° Pengu ku ra n Su d u t Perubahan Sudut
Kompas Analog vs Sensor Magnetometer
Gambar 4.57 Kesalahan sensor magnetometer terhadap kompas analog
4.4.4 Pengujian Sensor Barometer
Pengujian sensor barometer dilakukan dengan dua acara, yaitu pengujian dengan ketinggian statis dan pengujian dengan ketinggian dinamis.
4.4.4.1 Pengujian Statis Sensor Barometer
Pada pengujian ini sensor barometer digital dibandingkan dengan sensor
barometer analog (aneroid) didiamkan selama beberapa detik. Hasil pengujian
disajikan pada gambar
-60° 0° 60° 0 20 40 60 80 90 100 120 140 160 180 200 220 240 260 270 280 300 320 340 360
Gambar 4.58 Quadrotor dan barometer analog (aneroid)
Gambar 4.59 Barometer digital vs barometer analog 4.4.4.2 Pengujian Ketinggian
Pengujian ketinggian dilakukan dengan menggunakan katrol tetap yang dipasang pada ketinggian 5m. Tanda garis hitam diberikan setiap 50cm sepanjang tali yang akan digunakan pada katrol. Inisialisasi pengukuran, quadrotor diikat
985.85 985.90 985.95 986.00 986.05 986.10 986.15 986.20 986.25 0 1 2 3 4 5 6 7 8 10 11 12 13 14 15 16 17 18 19 20 Te ka n an (m b ar) Waktu (s)
Barometer Digital vs Barometer Analog
dengan tali tersebut dan ditempatkan pada dasar permukaan instalasi katrol. Pembacaan sensor barometer dilakukan dari titik terendah sampai titik tertinggi dengan kenaikan ketinggian setiap 50cm.
Gambar 4.60 Pengukuran ketinggian
Gambar 4.61 Hubungan barometer dan suhu terhadap ketinggian 0 50 100 150 200 250 300 350 400 450 Pressure 981.32 981.26 981.22 981.14 981.07 981.02 980.96 980.9 980.84 980.78 Temperature 31.01 31.07 31.14 31.2 31.27 31.31 31.34 31.38 31.41 31.45 30.70 30.80 30.90 31.00 31.10 31.20 31.30 31.40 31.50 980.50 980.60 980.70 980.80 980.90 981.00 981.10 981.20 981.30 981.40 Te m p era tu re ( °C) Pre ss u re (m b ar) Height (cm)
Dengan menggunakan persamaan (2.88), maka didapatkan titik terendah pada pengujian adalah sebesar 262 meter dari permukaan laut. Dengan berasumsi titik nol berada pada ketinggian 262 meter, maka menghasilkan grafik pada gambar 4.62.
Gambar 4.62 Pengukuran ketinggian vs aktual ketinggian
Berdasarkan gambar 4.62, sensor barometer mempunyai penyimpangan absolut rata-rata sebesar 5.72cm. Hal ini menunjukan bahwa perhitungan posisi ketinggian dengan sensor barometer cukup akurat.
4.5 Pengujian Posisi Sudut
Pada pengujian ini, posisi sudut yang dihasilkan dari DMP dengan menggunakan persamaan pada blok diagram gambar 3.18 dibandingkan dengan beberapa algoritma. Untuk memudahkan pengujian, penulis menggunakan sumber data yang sama dengan pengujian respon accelerometer dan pengujian respon
gyroscope. 0 50 100 150 200 250 300 350 400 450 Pengukuran 0.00 51.27 85.45 153.81 213.63 256.36 307.64 358.92 410.21 461.49 Aktual 0 50 100 150 200 250 300 350 400 450 0 50 100 150 200 250 300 350 400 450 500
4.5.1 Direct AHRS
Perhitungan sudut pitch dan roll dengan cara langsung menggunakan persamaan (2.32) dan persamaan (2.33), sedangkan perhitungan sudut yaw menggunakan persamaan (2.31).
Gambar 4.63 DMP Yaw vs Direct Yaw
Gambar 4.63 menunjukan bahwa hasil perhitungan sudut yaw dengan algoritma direct tidak smooth seperti DMP, hal ini disebabkan karena frekuensi membaca raw sensor magnetometer lebih rendah daripada pembacaan DMP. Selain itu perhitungan dengan raw magnetometer terjadi lagging beberapa milisecond. Pada pengujian ini penyimpangan absolut rata-rata algoritma DMP dengan Direct adalah sebesar 19.64°. -60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Yaw vs Direct Yaw
Gambar 4.64 DMP Pitch vs Direct Pitch
Gambar 4.65 DMP Roll vs Direct Roll
Gambar 4.64 menunjukan bahwa perhitungan sudut pitch dan roll memiliki penyimpangan absolut rata-rata 13.29° dan 16.02°. Hasil penyimpangan ini cukup besar, karena perhitungan dengan raw tanpa melibatkan filter.
-60 -40 -20 0 20 40 60 80 100 9457 12584 15713 18840 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Pitch vs Direct Pitch
DMP Pitch Direct Pitch
-80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Roll vs Direct Roll
4.5.2 Direct AHRS dengan Complementary Filter
Pada pengujian ini, hasil perhitungan posisi sudut dengan cara langsung kemudian disaring dengan metode complementary filter. Dengan diagram blok perhitungan pada gambar 2.27, dan menggunakan konstanta pada tabel dibawah ini.
Tabel 4.1 Konstanta-konstanta pada complementary filter
Yaw Pitch Roll
𝜏 0.019 0.025 0.075
Gambar 4.66 DMP Yaw vs Direct Yaw (Complementary Filter)
-60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Po sis i Su d u t (De raja t) Waktu (ms)
DMP Yaw vs Direct Yaw (Complementary Filter)
Gambar 4.67 DMP Pitch vs Direct Pitch (Complementary Filter)
Gambar 4.68 DMP Roll vs Direct Roll (Complementary Filter)
Berdasarkan hasil pengujian pada gambar 4.46-4.68, penyimpangan absolut rata-rata sudut Yaw, Pitch dan Roll masing-masing adalah 11.61°, 12.82°, dan 15.73°. Complementar filter bekerja mengurangi penyimpangan absolut rata-rata pada perhitungan dengan metode direct.
-60 -40 -20 0 20 40 60 80 9457 12584 15713 18840 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Pitch vs Direct Pitch (Complementary Filter)
DMP Pitch Direct Pitch (Complementary Filter)
-80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Roll vs Direct Roll (Complementary Filter)
4.5.3 Direct AHRS dengan Kalman Filter
Pada pengujian ini, hasil perhitungan posisi sudut dengan cara langsung kemudian disaring dengan metode Kalman Filter. Pengujian ini dengan menggunakan persamaan (2.59) – (2.65) dan konstanta :
Tabel 4.2 Konstanta-konstanta pada kalman filter
Yaw Pitch Roll
Q Angle 0.5 0.1 1
Q Gyro 0.5 0.1 1
R Measure 0.05 0.01 1
Maka dengan menggunakan persamaan dan konstanta tersebut, gambar 4.69-4.71 merupakan hasil dari perhitungan sudut direct dengan kalman filter.
Gambar 4.69 DMP Yaw vs Direct Yaw (Kalman Filter)
-60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Yaw vs Direct Yaw (Kalman Filter)
Gambar 4.70 DMP Pitch vs Direct Pitch (Kalman Filter)
Gambar 4.71 DMP Roll vs Direct Roll (Kalman Filter)
Seperti yang dapat dilihat pada gambar 4.69-4.71, kalman filter bekerja menghasilkan penyimpangan absolut rata-rata masing-masing (yaw, pitch dan roll) sebesar 20.03°, 8.00° dan 10.13°. Jika dibandingkan dengan pengujian pada penyimpangan sebelumnya (direct dan complenentary filter), perhitungan sudut yaw dengan kalman filter memberikan penyimpangan yang lebih besar daripada
-60 -40 -20 0 20 40 60 80 100 9457 12584 15713 18840 Po sis i Su d u t (De raja t) Waktu (ms)
DMP Pitch vs Direct Pitch (Kalman Filter)
DMP Pitch Direct Pitch (Kalman Filter)
-80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Roll vs Direct Roll (Kalman Filter)
direct dan complementary filter, namun untuk sudut pitch dan roll dengan kalman filter memiliki penyimpangan yang lebih kecil daripada metode keduanya.
4.5.4 DCM
Pada pengujian ini, menggunakan pengukuran sensor accelerometer, sensor
gyroscope dan sensor magnetometer. Tabel dibawah ini merupakan konstanta
pengendali PI yang digunakan untuk pengujian dengan algoritma DCM.
Tabel 4.3 Konstanta-konstanta pada DCM
Yaw Pitch Roll
Kp 15 0.02 0.02
Ki 0.8 1 1
Gambar 4.72 DMP Yaw vs DCM Yaw
-60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Yaw vs DCM Yaw
DMP Yaw DCMGambar 4.73 DMP Pitch vs DCM Pitch
Gambar 4.74 DMP Roll vs DCM Roll
Gambar 4.72-4.74 merupakan hasil pengujian dengan algoritma DCM. Berdasarkan pengujian tesrebut algoritma DCM sudut yaw, pitch dan roll masing-masing memiliki penyimpangan absolut rata-rata sebesar 23.04°, 26.38° dan 17.61°. Penyimpangan ini jauh lebih besar daripada pengujian dengan
-80 -60 -40 -20 0 20 40 60 80 100 9457 12584 15713 18840 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Pitch vs DCM Pitch
DMP Pitch DCM Pitch -80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)DMP Roll vs DCM Roll
DMP Roll DCM Rollmenggunakan algoritma sebelumnya. Hal ini kemungkinan dikarenakan adanya kesalahan input pada konstanta pengendali PI.
4.5.5 Mahony AHRS
Pada pengujian ini menggunakan algoritma Mahony dengan konstanta pada table 4.4.
Tabel 4.4 Konstanta-konstanta pada Mahony AHRS Nilai
Kp 0.005
Ki 0.00001
Gambar 4.75 DMP Yaw vs Mahony AHRS Yaw
-60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Yaw vs Mahony Yaw
Gambar 4.76 DMP Pitch vs Mahony AHRS Pitch
Gambar 4.77 DMP Roll vs Mahony AHRS Roll
Pada gambar 4.75-4.77 dapat dilihat bahwa perbandingan posisi sudut DMP dengan perhitungan algoritma Mahony AHRS tidak berbeda jauh. Masing-masing sudut (yaw, pitch dan roll) pada pengujian ini memiliki penyimpangan absolut rata-rata sebesar 4.43°, 5.32° dan 6.63°.
-60 -40 -20 0 20 40 60 80 9457 12584 15713 18840 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Pitch vs Mahony Pitch
DMP Pitch Mahony Pitch
-80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Roll vs Mahony Roll
4.5.6 Madgwick AHRS
Pengujian posisi sudut dengan algoritma madgwick menggunakan konstanta sebagai berikut:
Gambar 4.78 Grafik DMP Yaw vs Madgwick AHRS Yaw
Gambar 4.79 DMP Pitch vs Madgwick AHRS Pitch
-60 -40 -20 0 20 40 60 80 100 2540 5667 8796 Po sis i Su d u t (De raja t) Waktu (ms)
DMP Yaw vs Madgwick Yaw
DMP Yaw Madgwick Yaw
-60 -40 -20 0 20 40 60 80 9457 12584 15713 18840 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Pitch vs Madgwick Pitch
Gambar 4.80 DMP Roll vs Madgwick AHRS Roll
Dapat dilihat bahwa pada gambar 4.78-4.79, perbandingan posisi sudut DMP dengan perhitungan algoritma madgwick tidak berbeda jauh. Masing-masing sudut (yaw, pitch dan roll) pada pengujian ini memiliki penyimpangan absolut rata-rata sebesar 4.33°, 5.37° dan 8.50°.
4.6 Pengujian Kontrol PI-D
Pada pengujian ini, menggunakan bench-test sebagai alat untuk percobaan pengaturan konstanta Kp, Ki dan Kd pada kontrol PI-D. Alat ini digunakan agar quadrotor tidak rusak atau jatuh pada saat pengujian. Pada gambar 4.81 menunjukan realisasi alat pengujiannya.
-80 -60 -40 -20 0 20 40 60 19243 22370 25497 28625 Pos is i Sud u t (D eraja t) Waktu (ms)
DMP Roll vs Madgwick Roll
Gambar 4.81 Alat pengujian keseimbangan quadrotor 4.6.1 Pengujian Mode Akrobatik
Dengan menggunakan metode eksperimental, konstanta Kp, Ki, dan Kd untuk mode akrobatik yang paling terakomodir adalah menggunakan konstanta pada tabel dibawah ini.
Tabel 4.5 Konstanta-konstanta pengendali PI-D dengan mode akrobatik
Kp Ki Kd
0.75 0.0205 0.02343
Pengujian respon kontrol PI-D dilakukan dengan memberikan gangguan ketika quadrotor sudah stabil.
Gambar 4.82 Respon kontrol PI-D pada sudut roll dengan mode akrobatik
Berdasarkan hasil pengujian pada gambar 4.82, gangguan yang diberikan menyebabkan kemiringan quadrotor sebesar -113°, pengendali PI-D memberikan respon untuk mengembalikan ke posisi semula dalam waktu kurang dari 1 detik. Hal ini membuktikan bahwa respon pengendali PI-D cukup responsif ketika diberi gangguan.
4.6.2 Pengujian Mode Angle
Dengan menggunakan metode ekperimental, konstanta Kp, Ki dan Kd untuk mode sudut
Tabel 4.6 Konstanta-konstanta pengendali PI-D dengan mode angle
Kp Ki Kd 0.85 0.0125 0.025 0 121 381 622 883 1003 1124 1384 1505 1625 2005 2126 2267 2386 2507 2627 3008 3129 3389 3510 3630 3891 4010 Roll 0 0 1 1 1 2 2 0 -26 -113 -83 -10 -8 -25 -7 -1 2 2 3 3 3 3 3 -120 -100 -80 -60 -40 -20 0 20 Su d u t (d era ja t) Waktu (ms)
Pengujian Respon Kontrol PI-D Mode Akrobatik pada Sudut Roll
Respon Kontrol PI-D Gangguan
Gambar 4.83 Respon kontrol PI-D pada sudut roll dengan mode angle
Pengujian respon pengendali PI-D dengan mode angle dapat dilihat pada gambar 4.83. Berdasarkan pengujian tersebut menujukan bahwa gangguan diberikan menyebabkan kemiringan sudut roll quadrotor sebesar -67°. Pengendali PI-D memberikan respon untuk mengembalikan ke posisi semula dalam kurun waktu kurang dari 1 detik.
4.6.3 Pengujian Mode Yaw Lock
Pengujian ini menggunakan metode eksperimental untuk tuning PI-D pada mode yaw lock. Tabel 4.6 merupakan konstanta PI-D hasil dari eksperimental.
Tabel 4.7 Konstanta-konstanta pengendali PI-D dengan mode yaw lock
Kp Ki Kd 0.75 0.0205 0.02343 0 160 300 460 1001 1020 1200 1360 1540 1761 1981 2121 2341 2701 2901 3141 3161 Roll 0 4 3 3 -4 -5 -6 -9 -18 -67 -20 -41 -29 -13 5 6 6 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 Su d u t (d era ja t) Waktu (ms)
Pengujian Respon Kontrol PI-D Mode Angle pada Sudut Roll Respon Kontrol PI-D Gangguan
Gambar 4.84 Respon kontrol PI-D pada sudut yaw dengan mode yaw lock
Berdasarkan hasil pengujian gambar 4.84, menujukan bahwa gangguan yang diberikan menyebabkan kemiringan sudut yaw quadrotor sebesar 85°. Pengendali PI-D memberikan respon untuk mengembalikan ke posisi semula dalam kurun waktu sekitar 3 detik.
4.7 Pengujian Keseluruhan
Pengujian keseluruhan dilakukan dengan menerbangkan quadrotor pada tempat terbuka. Pada pengujian ini dilakukan beberapa langkah sebagai berikut :
- Lepas landas - Bergerak maju - Bergerak mundur
- Berhenti dan tahan selama 3 detik - Bergerak ke kiri
- Bergerak ke kanan
- Berhenti dan tahan selama 3 detik
0 159 319 680 900 1320 1440 1740 1899 2100 2120 2320 2480 2639 2799 2799 3001 3181 3360 3520 3700 3919 4101 4259 4420 4600 4760 4961 5141 5320 5502 5681 Yaw 0 0 0 1 1 0 4 48 67 81 81 85 83 77 69 69 59 49 41 34 27 22 18 15 12 10 8 5 4 3 3 3 -10 0 10 20 30 40 50 60 70 80 90 Su d u t (d era ja t) Waktu (ms)
Pengujian Respon Kontrol PI-D Mode Yaw Lock pada Sudut Yaw Respon Kontrol PI-D
- Putar ke kiri - Putar ke kanan
- Berhenti dan tahan selama 3 detik - Mendarat