Judul : Analisis kinematika terbalik pada prototipe Robot Lengan 3-DoF dengan metode adaptif !{eu.o Fuz4; Sistem Inferensi (ANFIS) Dengan ini saya menyatakan bahwa hasil penulisan skripsi telah saya kerjakan. Pertama-tama saya panjatkan puji syukur kehadirat Allah S.W.T yang telah memberikan rahmat dan karunia-Nya kepada penulis sehingga dapat menyelesaikan skripsinya yang berjudul “Analisis Invers Kinematika Prototipe Robot Lengan 3-DOF dengan Metode Adaptive Neuro Fuzzy Inference System (ANFIS)” “. Namun, metode kinematika invers memiliki kompleksitas yang tinggi karena memerlukan perhitungan fungsi turunan dari kinematika maju.
Penerapan metode ANFIS yang diimplementasikan dalam penelitian ini merupakan solusi invers kinematik untuk mengurangi kompleksitas metode tersebut. Berdasarkan hasil pengujian yang dilakukan, RMSE untuk inverse kinematics memiliki nilai, sedangkan RMSE untuk metode ANFIS memiliki nilai. Namun metode kinematika invers sangat rumit karena memerlukan perhitungan turunan fungsi kinematika maju.
Beberapa jurnal penelitian kini telah menerapkan metode ANFIS untuk mengontrol gerak robot sebagai pengganti invers kinematika. ANALISIS KINEMATIK TERBALIK PADA PROTOTIPE ROBOT ARM 3-DOF MENGGUNAKAN METODE ADAPTIF NEURO FUZZY INFERENENCE SYSTEM (ANFIS). Bagaimana menerapkan Sistem Inferensi Fuzzy Neuro Adaptif sebagai solusi kinematika terbalik untuk lengan robot 3-DOF.
Pengujian dilakukan dengan membandingkan koordinat input dan output end effector berdasarkan metode inverse kinematics dan metode ANFIS.
PENDAHULUAN
Latar Belakang
Rumusan Masalah
Tujuan Penelitian
Batasan Masalah
Metodologi Penelitian
Sistematika Penulisan
LANDASAN TEORI
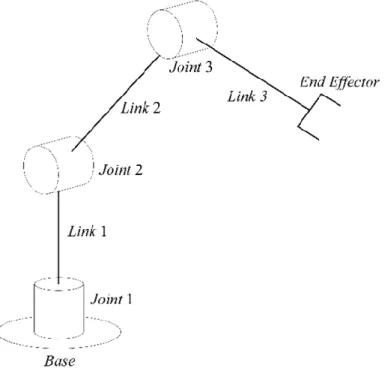
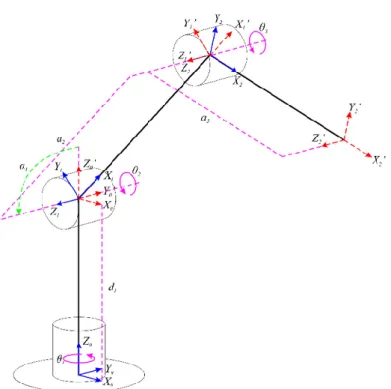
- Lengan Robot 3-DOF
- Link Perantara dalam Deretan
- Link Pertama dan Terakhir dalam Deretan
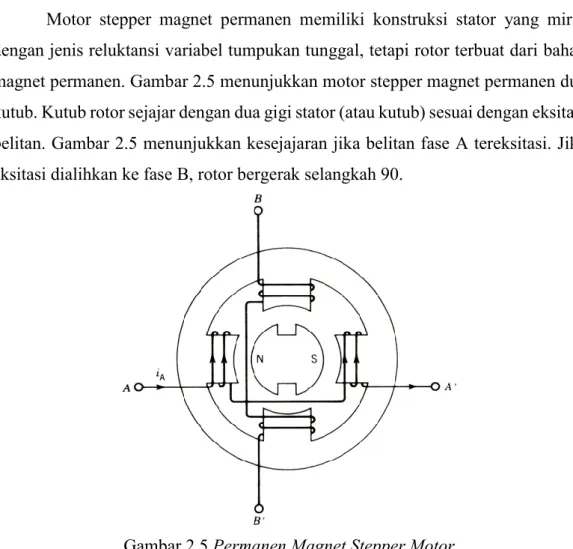
- Permanent Magnet Stepper Motor
DeSouza dalam IEEE International Conference on Fuzzy Systems (FUZZ-IEEE) berjudul "A Study on Solving the Inverse Kinematics of Serial Robots using Artificial Neural Network and Fuzzy". Tujuan ini lebih baik diarahkan untuk menggunakan kinematika invers robotik di dunia nyata, di mana setiap pose efektor akhir harus dapat dijangkau dari pose apa pun saat ini. Dalam jurnal ini, penelitian menggunakan metodologi Design of Experiment (DoE) untuk mengoptimalkan parameter ANFIS yang signifikan ketika diterapkan pada solusi invers kinematika.
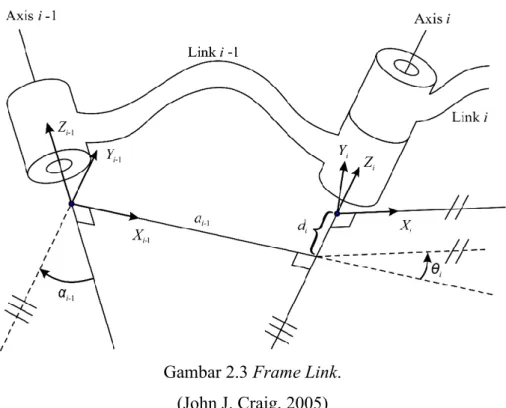
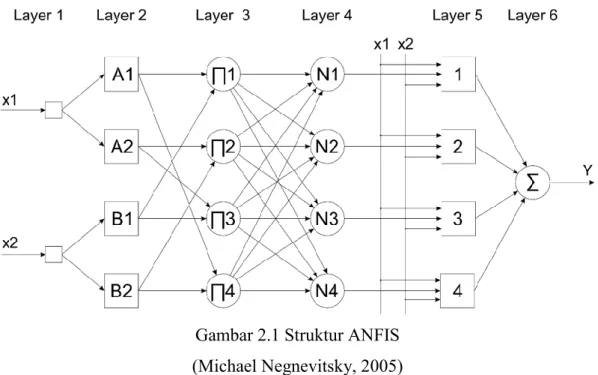
Sejumlah persamaan kinematika terbalik telah dikembangkan yang memungkinkan untuk mendapatkan hubungan antara sudut sambungan, panjang sambungan dan posisi yang diinginkan dalam kaitannya dengan posisi awal. Pada tahun 2017, makalah penelitian dibuat oleh Pannawit Srisuk, Adna Sento dan Yuttana Kitjaidure dalam International Conference on Electrical Engineering/Electronics, Computing, Telecommunications and Information Technology (ECTI-CON) ke-14 bertajuk “Forward Kinematic-like Neural Network for Solving 3D -mencapai masalah kinematika terbalik.” Setiap neuron di lapisan ini terhubung ke setiap neuron normalisasi dan juga menerima input awal, x1 dan x2.
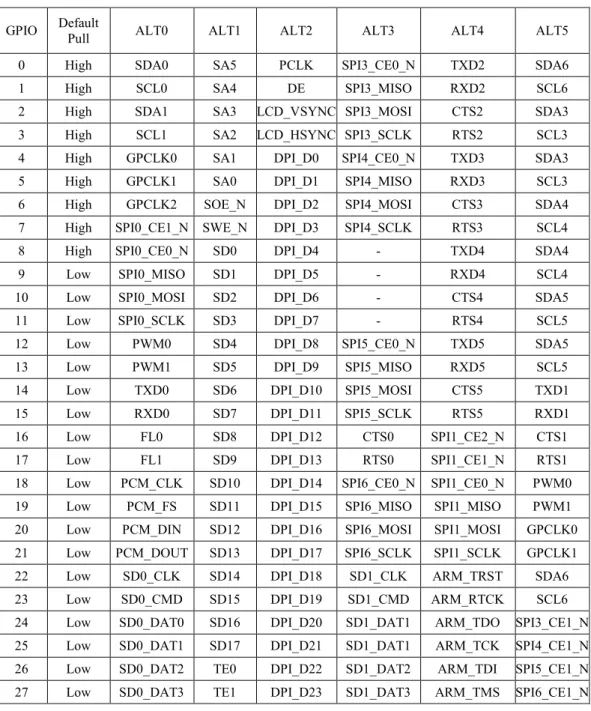
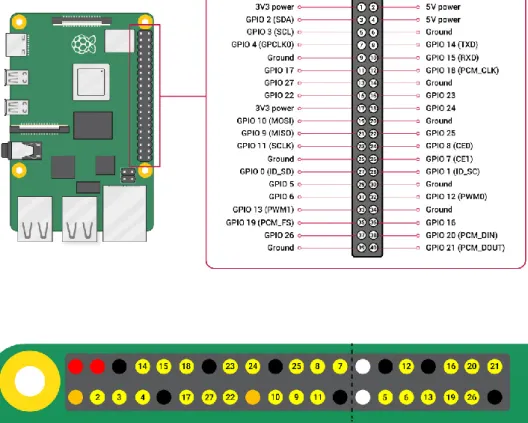
Menurut situs resminya, Raspberry Pi adalah komputer murah seukuran kartu kredit yang dapat dihubungkan ke monitor komputer atau TV dan menggunakan keyboard dan mouse standar. Raspberry Pi seperti perpaduan antara komputer dan mikrokontroler karena Raspberry Pi memiliki General Purpose Input Output (GPIO). Raspberry Pi memiliki 28 General Purpose Input Output (GPIO) yang dapat digunakan sebagai input atau output digital.
Akibatnya, motor stepper dapat digerakkan oleh pulsa untuk melanjutkan satu langkah maju atau mundur, daripada gerakan kontinu mulus dari motor DC standar. Ada juga jumlah langkah maksimum per detik tergantung pada beban yang membatasi kecepatan motor stepper. Motor stepper magnet permanen memiliki konstruksi stator yang mirip dengan resistor variabel komponen tunggal, tetapi rotornya terbuat dari bahan magnet permanen.
Perhatikan bahwa polaritas arus penting dalam motor stepper magnet permanen, karena menentukan arah gerak motor. Sulit untuk membuat rotor magnet permanen kecil dengan sejumlah besar kutub, dan oleh karena itu motor stepper jenis ini terbatas pada ukuran langkah yang lebih besar dalam kisaran 30 hingga 90. Motor magnet permanen memiliki inersia yang lebih tinggi dan karenanya berakselerasi lebih lambat daripada motor stepper keengganan variabel.
Kecepatan langkah maksimum untuk motor stepper magnet permanen adalah 300 pulsa per detik, sedangkan untuk motor stepper. Motor stepper magnet permanen menghasilkan lebih banyak torsi per ampere arus stator daripada motor stepper keengganan variabel (Paresh C. Sen, 2014).
PERANCANGAN ALAT
Perancangan Struktur ANFIS
HASIL DAN PEMBAHASAN
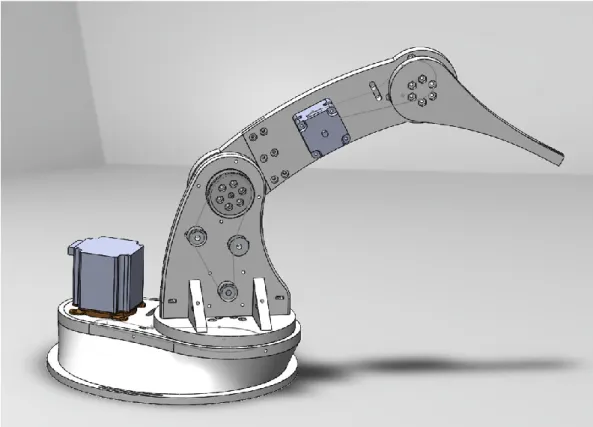
Hasil Perancangan Mekanik Robot 3-DOF
Pengujian Sistem
- Pengujian Metode Inverse Kinematics
- Pengujian Metode ANFIS
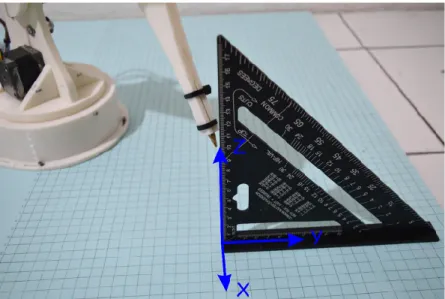
Teknik pengujian dilakukan dengan mengukur jarak antara posisi end effector pada sumbu X, Y dan Z dengan menggunakan alat ukur seperti pada Gambar 4.2. Untuk menguji tingkat ketelitian metode inverse kinematics digunakan persamaan yang diperoleh sebelumnya. Pengujian metode ANFIS dilakukan dengan melatih kumpulan data yang dibuat dan diterapkan pada program.
Analisa Pengujian
PENUTUP
Kesimpulan
Telah dilakukan perancangan, fabrikasi dan pengujian sistem pada prototipe lengan robot dengan metode inverse kinematics dan metode ANFIS. Metode inverse kinematics dilakukan dengan mereduksi fungsi forward kinematics sehingga diperoleh nilai sudut joint masing-masing. Kemudian membuat fungsi keanggotaan fuzzy untuk memproses data masukan sebelum diterima oleh node jaringan saraf.
Jumlah node yang dibuat dalam jaringan saraf bergantung pada aturan dan jumlah fungsi keanggotaan. Laju kesalahan yang dihasilkan untuk masing-masing metode adalah untuk metode kinematika terbalik dan untuk metode ANFIS.
Saran
A study on solving the inverse kinematics of serial robots using an artificial neural network and a fuzzy neural network". GPIO.setup(pin_en, GPIO.OUT) #setting pin enable->output GPIO.setup(pin_dir, GPIO .OUT) #setting pin direction->output GPIO.setup(pin_pul, GPIO.OUT) #setting pin pulse-> output GPIO.output(pin_en, False) #enable ON.GPIO.setup(pin_en, GPIO.OUT) # setting pin enable->output GPIO.setup(pin_dir, GPIO.OUT) #setting pin direction->output GPIO.setup(pin_pul, GPIO.OUT) #setting pin pulse-> output GPIO.output(pin_en, False) #enable ON.