isprsannals II 3 W2 31 2013
Teks penuh
Gambar
Dokumen terkait
To approach the problem of a comparatively big model and the fact, that the camera pose is inside the model and only parts of it are visible at a current pose, virtual camera poses
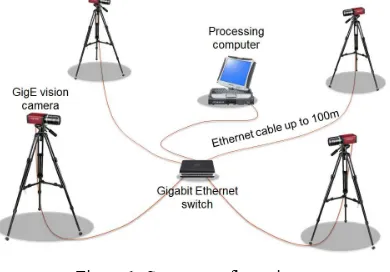
As shown in Figure 1, the framework consists of two stages: (1) determining preliminary position and attitude using built-in sensory data such as velocity and angular rates, and
In this paper we develop and compare two methods for scene classification in 3D object space, that is, not single image pixels get classified, but voxels which carry geometric,
The graph shown in Figure 11 shows two types of 3D spatial data sets used in the single object search: CityGML data and 3D spa- tial data with space-filling curve implementation..
From the concepts presented, the requirements for the unified spatial data model: are to construct a 3D geometry capable of representing regular objects (such
The GeoVideo data are divided into moving trajectory and video segments around the monitoring object and the same time period video segments from different
This article introduced how to extract road information from OSM data facing its specific data feature, and by means of building multimodal road network modal,
F-Perceptory does not consider, until now, all the possibilities of expression concerning the forms of spatial objects (object aggregation of fuzzy similar
