T1 612009026 BAB III
Teks penuh
Gambar







Garis besar
Dokumen terkait
Pada saat sensor ultrasonik bagian depan mendeteksi adanya objek penghalang maka akan berbelok dengan sudut 125 0 ke arah kiri atau ke arah kanan secara bergantian
Pada gambar kawat berarus berikut tanda menyatakan induksi magnetik keluar tegak lurus bidang kertas dan tanda x menyatakan induksi magnetik masuk tegak lurus bidang kertas,
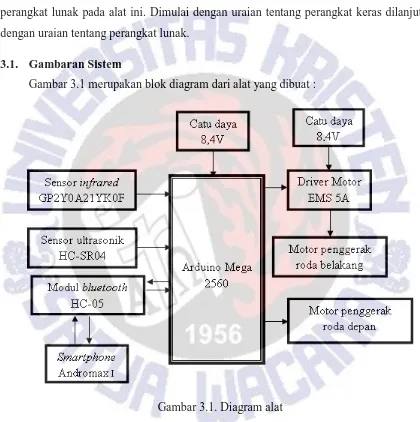
Pada Gambar 3.9 Arduino sebagai mikrokontroler digunakan untuk mengatur sensor-sensor yang terpasang pada mobile robot , seperti sensor ultrasonik PING, Adjustable
Mengolah data yang didapat dari modul sensor ultrasonik SR04 untuk.. mengukur
Perancangan ini menggunakan sensor ultrasonik untuk mendeteksi dinding lintasan, motor DC penggerak untuk menggerakkan robot maju dan mundur, motor DC kemudi untuk menggerakkan robot
Untuk menetukan NQ1 menggunakn gambar diatas, yaitu dengan menentukan DS sesuai analisis lalu tarik keatas sampai tegak lurus dengan kapasitas yang akan digunakan
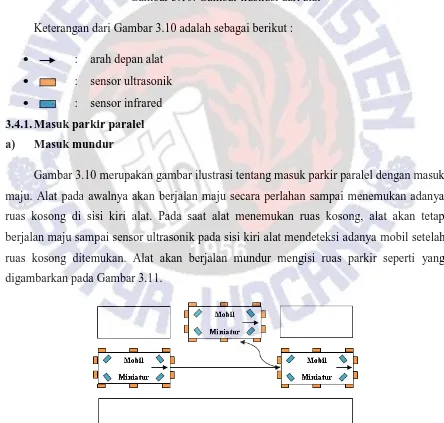
Desain satuan ruang parkir yang baik akan memudahkan manuver bagi pengemudi, sehingga kendaraan tidak perlu maju – mundur beberapa kali untuk masuk atau keluar dari
Portal pintu setelah sensor ultrasonik mendeteksi objek melintas Gambar 10 merupakan hasil KTM yang sudah berhasil masuk dan sensor ultrasonik berhasil mendeteksi kendaraan yang telah
