isprs archives XLII 2 W4 33 2017
Teks penuh
Gambar


Garis besar
Dokumen terkait
Extending the experimentation, set-2 and set-4, considering 15 genuine and 15 skilled forge sample features for training and tested with remaining 9 genuine and 15 skilled forge
Crescent structures in cervical mucus facies consist of short semicircular lines arranged in groups (Figures 3 and 4). Crescent structures in blood serum facies with short
Due to its versatility, this parametric representation of video signals can be used for different tasks of biometrics, computer vision, machine learning, automatic systems
Then, let us assume that co-ordinate vector { X } of all the points of the cloud is associated with a final cloud position, when the source cloud is fit to the target surface and
Requirements for on -board equipment and sensors of the robot for the "Follow me" mode can be formulated on the basis of the following list of
(a) The horizontal and vertical accuracies of photogrammetric and Lidar datasets integration by photogrammetric procedure improved significantly when ISO approach were
In this contribution, the development of a virtual museum (MEDWINET) about the Stoa of Attalos has been designed and developed, firstly with the creation of 3D models
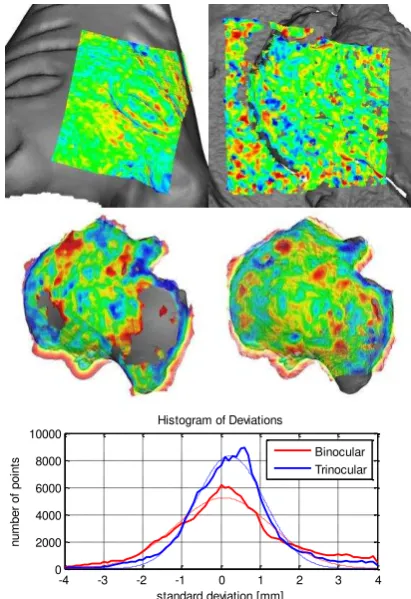
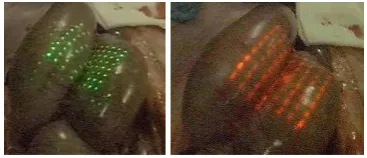
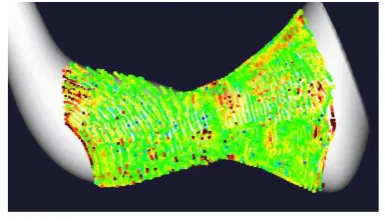
The present work implements four 3D reconstruction techniques: passive stereoscopy, active stereoscopy, shape from contour and fringe profilometry to find the measurement error and
