1 PROVINSI JAWA BARAT KODE POS 40215
KEWARGANEGARAAN : INDONESIA TELEPON : 022-6127250 PONSEL : 085624990503
EMAIL : [email protected]
PENDIDIKAN :
- TK LPPN BANDUNG TAHUN 1995-1996
- SD NEGERI ANDIR I KOTA BANDUNG TAHUN 1996-2002 - SMP NEGERI 25 BANDUNG TAHUN 2002-2005
- SMA NEGERI 18 BANDUNG TAHUN 2005-2008
2 BERODA PADA TAHUN 2009-2010
- PESERTA KERJA PRAKTEK DI PT. INTI PERSERO BANDUNG DI BAGIAN SPAREPART DAN LOGISTIK PADA BULAN JULI 2011-SEPTEMBER 2011
- ANGGOTA TIM TRAFFIC COUNTING LAPI-ITB DAN KIEC KRAKATAU STEEL DI BAGIAN TIM LAPANGAN DI KOTA CILEGON BANTEN BULAN FEBRUARI 2012
BANDUNG, AGUSTUS 2013 HORMAT SAYA,
TUGAS AKHIR
STUDI KOMPARASI SENSOR MONITORING
LEVEL KETINGGIAN AIR
Laporan ini disusun untuk memenuhi salah satu syarat kelulusan menempuh
pendidikan program sarjana di Program Studi Teknik Elektro
Oleh:
Lagha Yudha Pradana
13108019
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
vi
KATA PENGANTAR
Penulis memanjatkan puji dan syukur kehadirat Illahi Robbi yang telah
melimpah gandakan karunia dan kekuatan sehingga penulis dapat menyelesaikan
penelitian serta menyusun laporan tugas akhir ini, yang berjudul “Studi
Komparasi Sensor Monitoring Level Ketinggian Air”, disusun untuk
memenuhi salah satu syarat dalam menempuh pendidikan program Sarjana di
Program Studi Teknik Elektro, Fakultas Teknik dan Ilmu Komputer Universitas
Komputer Indonesia. Oleh karena itu, dalam kesempatan ini penulis mengucapkan
rasa terima kasih yang sebesar-besarnya kepada yang terhormat.
1. Ibu Pujiati dan Bapak Rohman serta Regitha Adit Pramesti, atas segala
dukungan dan doanya.
2. Bapak Muhammad Aria, M.T, sebagai Pembimbing Tugas Akhir
Sekaligus Ketua Program Studi Teknik Elektro Fakultas Teknik dan Ilmu
Komputer UNIKOM Bandung.
3. Ibu Tri Rahajoeningroem, M.T, selaku Koordinator Tugas Akhir Program
Studi Teknik Elektro Fakultas Teknik dan Ilmu Komputer UNIKOM
Bandung.
4. Yuga Aditya Pramana dan Mochammad Iqbal Nasrulallah teman
seperjuangan yang saling mensupport dalam pengerjaan tugas akhir ini.
5. Rida Angga Kusuma atas segala bantuan dan bimbingan dalam menjalani
vii
6. Dede Choerudin, Iyan Supiyani, dan Sitiuran Simanungkalit teman
seperjuangan di teknik elektro kendali 08.
7. Rekan-rekan mahasiswa dan mahasiswi Teknik Elektro UNIKOM yang
telah memberikan bantuan dan semangat selama penulisan laporan ini.
Semoga amal baik yang telah diberikannya mendapat imbalan yang setimpal
dari Allah SWT. Amin.
Penulis menyadari sepenuhnya bahwa laporan ini perlu penyempurnaan.
Karena itu, kritik dan saran dari semua pihak sangat penulis harapkan. Akhirnya
penulis berharap semoga laporan ini dapat memberikan manfaat bagi peningkatan
mutu pengajaran Teknik Elektro UNIKOM.
Bandung, Agustus 2013
viii
1.2 Identifikasi Masalah ... 4
1.3 Rumusan Masalah ... 4
1.4 Tujuan ... 5
1.5 Batasan Masalah ... 5
1.6 Metoda Penelitian ... 6
1.7 Sistematika Penulisan ... 7
BAB II DASAR TEORI 2.1 Sensor Ketinggian Air ... 9
2.1.1 Ultrasonik ... 9
2.1.2 Inframerah ... 11
2.1.3 Kawat yang Dialiri Listrik... 13
2.2 Rangkaian Catu Daya ... 13
2.3 ATMega8 ... 15
ix
2.7 Embedded Ethernet ... 30
2.8 TCP / IP ... 31
2.9 Modul Jaringan NM 7010A-LF ... 32
2.10 Borland Delphi ... 33
BAB III PEMILIHAN KOMPONEN 3.1 Sensor Ketinggian Air ... 39
3.1.1 Ultrasonik ... 39 4.1 Blok Diagram Sistem ... 46
4.2 Perancangan Pada Bagian Sensor Ketinggian Air ... 48
4.2.1 Kawat yang Dialiri Listrik ... 48
4.2.2 Inframerah ... 50
4.2.3 Ultrasonik ... 51
4.3 Perancangan Rangkaian Power Supply ... 52
4.4 Perancangan Rangkaian Sistem Minimum Mikrokontroler ATMega8 ... 53
4.5 Perancangan Rangkaian Downloader ... 54
4.6 Perancangan Rangkaian Display ... 55
4.7 Perancangan Box Display ... 56
x
4.9 Tampilan Internet ... 64
BAB V PENGUJIAN DAN ANALISA 5.1 Pengujian Sensor Ketinggian Air ... 66
5.1.1 Menggunakan Kawat yang Dialiri Listrik ... 66
5.1.2 Menggunakan Inframerah ... 69
5.1.3 Menggunakan Ultrasonik ... 71
5.2 Pengujian Tampilan LCD ... 72
5.3 Pengujian Interface ... 73
5.3.1 Koneksi ... 73
5.3.2 Penerimaan Database ... 74
5.3.3 Tampilan Grafik ... 74
5.4 Pengujian Keakuratan ... 76
5.5 Pengujian Inframerah ... 80
BAB VI KESIMPULAN DAN SARAN 6.1 Kesimpulan ... 84
6.2 Saran ... 85
DAFTAR PUSTAKA ... 86
86
1. S.M. Khaled Reza, Shah Ahsanuzzaman Md. Tariq, S.M Mohsin Reza. (2010),
Microcontroller Based Automated Water Level Sensing and Controlling :
Design and Implementation Issue. San Fransisco : Proceedings of the World
Congress on Engineering and Computer Science, Vol 1.
2. Permana, Fajar. (2009), Pembuatan Sistem Monitoring Ketinggian Air dengan
1 1.1 Latar Belakang
Kebutuhan air yang semakin meningkat seiring bertambahnya
kebutuhan dari masing-masing individu berdampak kepada masalah
ketersediaan air. Masalah ini berhubungan dengan penggunaan yang tidak
efisien dan kurangnya pengelolaan air yang memadai.
Pemantauan yang tepat diperlukan untuk menjamin ketersediaan air.
Pendekatan program tersebut memerlukan mikrokontroler berbasis sensor
dan pengendalian otomatis baik dalam lingkungan kabel ataupun nirkabel.
Sistem nirkabel bertujuan untuk memudahkan dalam pengawasan jarak
jauh.
Metode pendeteksian level air secara otomatis digunakan untuk
membuat perangkat berjalan menjadi lebih mudah, menyalakan pompa air
ketika level air rendah dan berjalan sampai dengan permukaan air yang lebih
tinggi tercapai dalam tangki penampung. Namun hal ini tidak sepenuhnya
didukung untuk sistem pengendalian yang memadai. Oleh karena itu,
dibutuhkan suatu alat yang dapat membaca dan mengetahui seberapa level
ketinggian air pada sumur dan tangki penampung sehingga bisa
mengendalikan pompa air agar lebih optimal.
Penggunaan sensor yang sesuai kebutuhan mempengaruhi sistem kerja
pompa air. Dengan menggunakan pelampung air dan inframerah kita dapat
sedikit karena terpaku pada batas atas dan batas bawah. Jika menggunakan
prinsip kerja kawat yang dialiri listrik, kemungkinan untuk mengontrol
pompa air menjadi lebih banyak sesuai dengan jumlah kawat yang di pakai
tetapi itu tidak praktis ketika terjadi perubahan dan penambahan level
ketinggian air. Oleh karena itu, meskipun sedikit mahal penggunaan sensor
ultrasonik menjadi pilihan yang lebih tepat karena data yang dihasilkan
berupa data analog sehingga memudahkan untuk mengontrol banyak
kemungkinan kerja pompa air dan juga lebih memudahkan untuk mengolah
data dalam bentuk grafik.
Tampilan kepada pengguna sangat dibutuhkan apabila pengguna
ingin mengetahui seberapa tinggi level air yang terdapat pada tangki
penampung serta sumur tanpa harus melihat ke dalam sumur atau naik ke
atap untuk melihat isi tangki penampung air. Selain dapat dipantau jarak
jauh malalui internet, terdapat tampilan LCD untuk memudahkan
pengawasan ketika berada di rumah. Tampilan LCD ini juga yang akan
memberikan tanda jika air di dalam sumur telah mencapai level tertentu
sehingga kita bisa lebih menghemat air.
Dengan diciptakannya alat ini diharapkan dapat mempermudah
pengguna dalam pengawasan level ketinggian air di tangki penampung dan
di sumur, dapat membandingkan beberapa sensor yang akan digunakan
sesuai dengan kebutuhan dan perekonomian pengguna, dapat mengontrol
pompa air dengan berbagai kemungkinan sesuai dengan kondisi air saat itu,
tersedianya pasokan air yang mencukupi sesuai dengan kondisi saat itu,
sudah mencapai level tertentu, dan juga dapat mengecek atau mengawasi
data ketinggian air ketika sedang berpergian menggunakan internet.
Dalam tugas akhir ini akan dijelaskan tentang penelitian monitoring
ketinggian air pada tangki air dan sumur. Sistem monitoring yang telah
dibuat di World Congress on Engineering and Computer Science 2010
(WCECS 2010) karya S.M. Khaled Reza, Shah Ahsanuzamman Md. Tariq,
dan S.M. Mohsin Reza dengan judul “Microcontroller Based Automated
Water Level Sensing and Controlling: Design and Implementation Issue”
menggunakan sensor kawat yang dialiri listrik (sistem konduktifitas) untuk
sensor level ketinggian air, menggunakan ADC eksternal untuk merubah
data analog ke digital sebelum data masuk ke mikrokontroler PIC16F84A,
serta menggunakan LED sebagai indikator ketinggian air dan pemantauan
jarak jauh melalui internet untuk tampilan kepada pengguna.
Tugas Akhir Fajar Permana Program Studi D III Instrumentasi dan
Elektronika Universitas Diponegoro pada Tahun 2009 dengan judul
“Pembuatan Sistem Monitoring Ketinggian Air dengan Sensor Ultrasonik
Berbasis Mikrokontroler ATmega 8535” menggunakan sensor ultrasonik
dengan jarak maksimal tiga meter sebagai sensor level ketinggian air,
menggunakan mikrokontroler ATmega 8535 sebagai pengolah data,
tampilan ketinggian air untuk pengguna menggunakan LCD dan bahasa
pemrograman mikrokontroler menggunakan bahasa C.
Oleh karena itu, Tugas Akhir yang saya rancang melakukan
perbandingan beberapa jenis sensor ketinggian air, mikrokontroler
jauh melalui komunikasi internet untuk tampilan kepada pengguna, serta
menggunakan pemrograman bahasa basic dengan software BASCOM AVR.
1.2 Identifikasi Masalah
Untuk membantu masalah pengontrolan pompa air, maka diperlukan
suatu pengontrolan yang mampu bekerja secara otomatis ataupun manual.
Serta untuk membantu masalah pengontrolan pompa air otomatis, maka
diperlukan suatu alat yang dapat menjadi sensor sehingga dapat
mengendalikan kerja pompa air baik menggunakan kawat yang dialiri
listrik, inframerah, ataupun menggunakan sensor ultrasonik.
1.3 Rumusan Masalah
Melihat latar belakang masalah maka permasalahan yang timbul adalah.
1. Bagaimana cara mengetahui kelebihan dan kekurangan masing-masing
sensor pada sistem monitoring air jika menggunakan sensor ultrasonik,
sensor kawat yang dialiri listrik, dan sensor inframerah baik dari segi
jangkauan jarak, pengaturan ulang jika ada perubahan batasan (level),
harga sensor, serta pemasangan sensor?
2. Bagaimana cara mengetahui perbedaan bentuk grafik yang ditampilkan di
website?
3. Bagaimana cara mempermudah pengguna untuk lebih menghemat air
dengan cara menampilkan peringatan pada LCD dan buzzer ketika air di
dalam sumur mencapai level rendah?
1.4 Tujuan
Adapun tujuan dari penelitian ini adalah.
1. Mengetahui kelebihan dan kekurangan masing-masing sensor pada sistem
monitoring air jika menggunakan sensor ultrasonik, sensor kawat yang
dialiri listrik, dan sensor inframerah baik dari segi jangkauan jarak,
pengaturan ulang jika ada perubahan batasan (level), harga sensor, serta
pemasangan sensor.
2. Mengetahui perbedaan bentuk grafik yang ditampilkan di website.
3. Mempermudah pengguna untuk lebih menghemat air dengan cara
menampilkan peringatan pada LCD dan buzzer ketika air di dalam sumur
mencapai level rendah.
4. Mengefektifkan pengontrolan pompa air.
1.5 Batasan Masalah
Permasalahan yang dibatasi saat ini yaitu.
1. Sumber air dari sumur galian dengan ketinggian maksimal enam meter,
bukan dari air PDAM ataupun sumur bor.
2. Sensor level ketinggian air pada tangki penampung dan sumur
menggunakan inframerah, kawat yang dialiri listrik dan sensor
ultrasonik.
3. Mikrokontroler menggunakan ATMEGA8.
4. Display menggunakan LCD 16x2.
5. Komunikasi data internet menggunakan paket data UDP.
1.6 Metoda Penelitian
Langkah-langkah penelitiannya yaitu.
1. Studi Literatur
Mencari dan membandingkan beberapa referensi yang didapat dari buku
dan internet untuk mendapatkan materi yang sesuai dengan masalah yang
nantinya akan dipecahkan dan dikembangkan. Materi yang akan dibahas
meliputi : pemrograman mikrokontroler ATmega8 menggunakan bahasa
basic, Bascom AVR, komunikasi internet, komunikasi serial,
sensor-sensor untuk mendeteksi ketinggian air.
2. Perancangan Desain Alat.
Membuat desain rangkaian dan layout PCB untuk sensor ketinggian
permukaan air, mikrokontroler, downloader mikrokontroler dan tampilan
(display).
3. Pengadaan Komponen.
Merencanakan apa saja komponen yang dibutuhkan kemudian
melakukan pencarian, pembelian dan pengadaan komponen.
Komponen-komponen yang dibutuhkan meliputi : sensor ketinggian permukaan air,
sistem minimum ATmega8, serta LCD sebagai penampil.
4. Pembuatan Rangkaian / Perangkaian Komponen.
Perangkaian komponen-komponen yang telah dipersiapkan sebelumnya
untuk menjadikannya menjadi suatu rangkaian. Dan kemudian
menggabungkan beberapa rangkaian sehingga menjadi sebuah alat yang
5. Penguji Cobaan Alat.
Menguji rangkaian sensor ketinggian air, rangkaian downloader,
rangkaian mikrokontroler, serta penampil pada LCD. Setelah itu
dilakukan pengujian keseluruhan sistem untuk mendapatkan data yang
diinginkan. Sehingga data yang ditampilkan pada LCD dan yang diterima
komputer sesuai dengan ketinggian permukaan air.
6. Melakukan Analisa dan Pembuatan Laporan.
Menganalisa hasil dari penguji cobaan alat dan kemudian
mencantumkannya dalam laporan.
1.7 Sistematika Penulisan
Adapun sistematika penulisan pada tugas akhir ini adalah sebagai berikut.
BAB I : PENDAHULUAN
Menguraikan tentang latar belakang, identifikasi masalah, rumusan
masalah, tujuan, batasan masalah, metode penelitian dan sistematika
penulisan yang digunakan dalam pembuatan tugas akhir ini.
BAB II : LANDASAN TEORI
Menguraikan tentang pembahasan teori-teori dasar yang menunjang
pada sistem yang digunakan untuk tugas akhir, yaitu : Bascom AVR,
komunikasi serial, komunikasi internet, sensor-sensor ketinggian
permukaan air, ATmega8, LCD 16x2.
BAB III : DASAR PEMILIHAN KOMPONEN
Membahas tentang pemilihan komponen yang akan dipakai dalam
menentukan komponen yang paling sesuai dan ditinjau dari
spesifikasi, harga, dan lain-lain.
BAB IV : PERANCANGAN DAN CARA KERJA SISTEM
Membahas tentang perancangan perangkat keras maupun perangkat
lunakuntuk membentuk sistem yang digunakan untuk monitoring
ketinggian air pada sumur dan tangki penampung secara jarak dekat
ataupun jarak jauh.
BAB V : PENGUJIAN SISTEM
Membahas tentang hasil pengujian dari perancangan sistem mulai dari
segi fungsi maupun kinerja sistem yang digunakan.
BAB VI : KESIMPULAN DAN SARAN
Berisi tentang kesimpulan dari pengujian keseluruhan sistem yang
9
Pada Bab ini masalah yang akan dibahas adalah berbagai teori penunjang
dari perancangan sensor monitoring level ketinggian air dan alat pengontrol untuk
mesin yang bersumber dari air sumur. Teori Penunjang yang akan dibahas berikut
ini meliputi sensor ketinggian air, rangkaian catu daya, mikrokontroler ATMega8,
LCD 16x2, relay, BASCOM AVR, embedded ethernet, TCP /IP, modul embedded
NM7010A, dan Borland Delphi 7.0.
2.1 Sensor Ketinggian Air
Sensor ketinggian air adalah sensor yang digunakan untuk mengukur
ketinggian air yang akan diuji. Sensor ketinggian air meliputi ultrasonik,
inframerah, dan kawat yang dialiri listrik.
2.1.1 Ultrasonik
Gelombang ultrasonik adalah gelombang yang memiliki frekuensi
diatas 20 KHz dan diluar jangkauan pendengaran manusia. Sensor
ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara, dimana
sensor ini menghasilkan gelombang suara yang kemudian menangkapnya
kembali dengan perbedaan waktu sebagai dasar penginderaannya.
Perbedaaan waktu antara gelombang suara yang dipancarkan dengan
jarak. Kecepatan rambat gelombang ultrasonik dipengaruhi oleh beberapa
faktor antara lain adalah suhu, tekanan, kelembaban, dan sinyal radio.
Gambar 2.1 SRF08
Hal yang harus diperhatikan ketika menggunakan sensor ultrasonik
terhadap suatu objek yaitu sebagai berikut.
a. Bentuk dan Ukuran Objek
Objek dengan ukuran yang lebih besar akan memantulkan lebih
banyak gelombang dibandingkan dengan objek yang berukuran kecil
sehingga memberikan hasil yang lebih presisi.
Bentuk suatu objek mempengaruhi banyaknya pantulan yang
dipantulkan objek. Objek dengan bentuk bulat akan memantulkan
gelombang ke segala arah sehingga pantulan yang ditangkap menjadi
lemah. Objek dengan bentuk datar akan memantulkan gelombang
dengan lebih baik.
sinyal ultrasonik yang dipancarkan akan memberikan pantulan yang
2.1.2 Inframerah
Cahaya inframerah merupakan cahaya yang tidak tampak. Jika dilihat
dengan spektroskop cahaya maka radiasi cahaya infra merah akan terlihat
pada spektrum elektromagnet dengan panjang gelombang di atas panjang
gelombang cahaya merah. Radiasi inframerah memiliki panjang gelombang
antara 700 nm sampai 1 mm dan berada pada spektrum berwarna merah.
Dengan panjang gelombang ini maka cahaya infra merah tidak akan terlihat
oleh mata namun radiasi panas yang ditimbulkannya masih dapat
dirasakan/dideteksi.
Pada dasarnya komponen yang menghasilkan panas juga
menghasilkan radiasi inframerah termasuk tubuh manusia maupun tubuh
binatang. Cahaya inframerah, walaupun mempunyai panjang gelombang
yang sangat panjang tetap tidak dapat menembus bahan-bahan yang tidak
dapat melewatkan cahaya yang nampak sehingga cahaya inframerah tetap
mempunyai karakteristik seperti halnya cahaya yang nampak oleh mata.
Pada pembuatan komponen yang dikhususkan untuk penerima
inframerah, lubang untuk menerima cahaya (window) sudah dibuat khusus
sehingga dapat mengurangi interferensi dari cahaya non-inframerah. Oleh
sebab itu sensor inframerah yang baik biasanya memiliki jendela (pelapis
yang terbuat dari silikon) berwarna biru tua keungu-unguan. Sensor ini
biasanya digunakan untuk aplikasi inframerah yang digunakan diluar rumah
(outdoor).
Komponen yang dapat menjadi penerima inframerah merupakan
transistor (phototransistor). Komponen ini akan merubah energi cahaya,
dalam hal ini energi cahaya infra merah, menjadi pulsa-pulsa sinyal listrik.
Komponen ini harus mampu mengumpulkan sinyal inframerah sebanyak
mungkin sehingga pulsa-pulsa sinyal listrik yang dihasilkan kualitasnya
cukup baik.
Gambar 2.2 Cara Kerja Pantulan Sensor Inframerah
Sensor jarak biasanya merupakan tugas dari sensor sonar, yang
mengirim keluaran pulsa suara dan menghitung seberapa lama waktu yang
dibutuhkan untuk echo kembali. Inframerah juga dapat difungsikan sebagai
sensor jarak dengan memanfaatkan dari pengaturan frekuensi.
Frekuensi yang paling sensitif akan mendeteksi benda atau objek
terjauh, sedangkan frekuensi kurang sensitif akan mendeteksi benda yang
lebih dekat. Pada umumnya inframerah menggunakan frekunensi 38,5 KHz.
Inframerah detektor akan menjadi kurang sensitif jika selain 38,5 KHz. Jika
inframerah bekerja pada frekuensi 40 KHz, inframerah hanya 50% sensitif
dibanding dengan frekuensi 38,5 KHz. Jika inframerah bekerja pada 42
2.1.3 Kawat Yang Dialiri Listrik
Air mampu bersifat konduktor yaitu mampu menghantarkan panas dan
juga mampu menghantarkan arus listrik. Air yang ada di bumi mampu
menghantarkan arus listrik. Air dapat terurai menjadi ion hidrogen dan ion
hidroksida dalam jumlah yang sedikit. Penguraian molekul air menjadi
ion-ionnya meskipun dalam jumlah yang sangat kecil tapi masih mampu
menghantarkan arus listrik.
Kawat yang diberi arus listrik dan kemudian dimasukan ke air dapat
terhubung dengan kawat lainnya jika kedua kawat sama-sama terendam oleh
air.Terhubung dan tidaknya arus listrik pada kawat dapat dijadikan sebagai
sensor sehingga mampu mengolah rangkaian selanjutnya.
Gambar 2.3 Kawat yang dialiri listrik dan terendam oleh air
Besar kecilnya arus listrik yang melewati kawat sangat bergantung
dari panjang pendeknya kawat, besar kecilnya luas penampang kawat, dan
tahanan jenis dari masing-masing kawat.
2.2 Rangkaian Catu Daya
Catu daya memiliki peranan penting dalam sebuah rangkaian
elektronika karena sebagai sumber tegangan kerja untuk menjalankan
tegangan.Rangkaian catu daya digunakan sebagai sumber tegangan yang
distabilkan untuk tegangan-tegangan dari rangkaian lainnya.
Tujuan pemasangan regulator tegangan pada rangkaian catu daya
adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan
tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan
adalah untuk perlindungan dari terjadinya hubung singkat pada beban.
LM78xx LM79xx
Gambar 2.4 Konfigurasi Pin LM78xx dan LM79xx
Salah satu regulator tegangan tetap yang umum dipakai adalah tipe
LM78xx digunakan untuk tegangan positif sedangkan untuk tegangan
negative digunakan tipe LM79xx. Regulator tegangan tipe LM 78xx adalah
salah satu regulator tegangan tetap dengan tiga terminal, yaitu Vin, GND
dan Vout. Regulator tegangan tetap LM 78xx dibedakan dalam tiga versi
yaitu LM 78xxC, LM 78lxx dan LM 78Mxx. Arsitektur dari IC regulator
tegangan tersebut sama, yang membedakan adalah kemampuan mengalirkan
Gambar 2.5 Skematik Rangkaian Catu Daya 5 Volt
Penggunaan resistor (R1) agar arus dan tegangan yang masuk LED1
tidak terlalu besar. C1 dan C5 digunakan sebagai kopling untuk bagian input
dan output IC regulator, C2 dan C4 difungsikan sebagai filter.
Catu daya 7805 mampu mengeluarkan arus 1 A. IC 7805 jika tidak
menggunakan pendingin (heatsink) dapat memboroskan daya sebanyak
2watt.
2.3 ATMega8
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya
terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada
umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu
menggunakan oscillator eksternal karena di dalamnya sudah terdapat
internal oscillator.
Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu
tidak perlu ada tombol reset dari luar karena cukup hanya dengan
Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC,
EEPROM sekitar 128 byte sampai dengan 512 byte.
Gambar 2.6 IC Mikrokontroler Atmega8
AVR ATmega8 adalah mikrokontroler CMOS 8-bit berarsitektur
AVR RISC yang memiliki 8K byte in-System Programmable Flash.
Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi
instruksi dengan kecepatan maksimum 16MIPS pada frekuensi 16MHz. Jika
dibandingkan dengan ATmega8L perbedaannya hanya terletak pada
besarnya tegangan yang diperlukan untuk bekerja. Untuk ATmega8 tipe L,
mikrokontroler ini dapat bekerja dengan tegangan antara 2,7 - 5,5 V
sedangkan untuk ATmega8 hanya dapat bekerja pada tegangan antara 4,5 –
Gambar 2.7 Konfigurasi pin Atmega8
ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki
fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya.
Berikut akan dijelaskan fungsi dari masing-masing kaki ATmega8.
VCC
Merupakan supply tegangan digital.
GND
Merupakan ground untuk semua komponen yang membutuhkan
grounding.
Port B (PB7...PB0)
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah
PortBadalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin
dapat digunakan sebagai input maupun output. Port B merupakan sebuah
8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input,
pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka
dapat digunakan sebagai input Kristal (inverting oscillator amplifier) dan
input ke rangkaian clock internal, bergantung pada pengaturan Fuse bit
yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7
dapat digunakan sebagai output Kristal (output oscillator amplifier)
bergantung pada pengaturan Fuse bit yang digunakan untuk memilih
sumber clock. Jika sumber clock yang dipilih dari oscillator internal,
PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan
Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1)
digunakan untuk saluran inputtimer.
Port C (PC5…PC0)
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam
masing-masingpin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah
mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port
C memiliki karakteristik yang sama dalam hal menyerap arus (sink)
ataupun mengeluarkan arus (source).
RESET/PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin
I/O. Pin ini memiliki karakteristik yang berbeda dengan pin-pin yang
terdapat pada port C lainnya. Namun jika RSTDISBL Fuse tidak
diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika
level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih
pendek dari pulsa minimum, maka akan menghasilkan suatu kondisi reset
Port D (PD7…PD0)
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up
resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja
pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini
hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut
dengan I/O.
AVcc
Pin ini berfungsi sebagai supply tegangan untuk ADC. Untuk pin ini
harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan
untuk analog saja. Bahkan jika ADC pada AVR tidak digunakan tetap
saja disarankan untuk menghubungkannya secara terpisah dengan VCC.
Jika ADC digunakan, maka AVcc harus dihubungkan ke VCC melalui
low passfilter.
AREF
Merupakan pin referensi jika menggunakan ADC.
Pada AVR status register mengandung beberapa informasi mengenai
hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini
digunakan untuk altering arus program sebagai kegunaan untuk
meningkatkan performa pengoperasian. Register ini di-update setelah
operasi ALU (Arithmetic LogicUnit) hal tersebut seperti yang tertulis dalam
datasheet khususnya pada bagian Instruction Set Reference. Dalam hal ini
untuk beberapa kasus dapat membuang penggunaan kebutuhan instrukasi
perbandingan yang telah didedikasikan serta dapat menghasilkan
singkat. Register ini tidak secara otomatis tersimpan ketika memasuki
sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah
kembali dari interupsi. Namun hal tersebut harus dilakukan melalui
software.
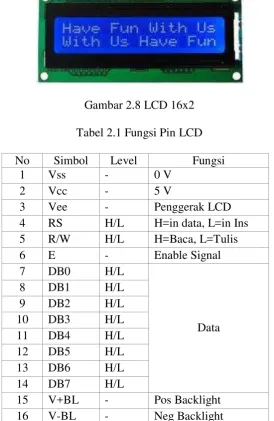
2.4 LCD 16X2
LCD (Liquid Crystal Display atau Tampilan Kristal Cair)adalah suatu
jenis media tampilan yang menggunakan kristal cair sebagai penampil
utama. LCD bisa memunculkan gambar atau tulisan dikarenakan terdapat
banyak sekali titik cahaya (piksel) yang terdiri dari satu buah kristal cair
sebagai sebuah titik cahaya. Walau disebut sebagai titik cahaya, namun
kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahaya di dalam
sebuah perangkat LCD adalah lampu neon berwarna putih di bagian
belakang susunan kristal cair tadi.
Titik cahaya yang jumlahnya puluhan ribu bahkan jutaan inilah yang
membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan
berubah karena pengaruh polarisasi medan magnetik yang timbul dan oleh
karenanya akan hanya membiarkan beberapa warna diteruskan sedangkan
warna lainnya tersaring.
Dalam menampilkan karakter untuk membantu menginformasikan
proses dan control yang terjadi dalam suatu program robot kita sering
menggunakan LCD juga. LCD 16x2 menyatakan 16 kolom dan 2 baris.
LCD 16x2 membutuhkan driver agar bisa dikoneksikan dengan system
pengatur tingkat kecerahan backlight maupun data, serta untuk
mempermudah pemasangan di mikrokontroler.
Gambar 2.8 LCD 16x2
Tabel 2.1 Fungsi Pin LCD
No Simbol Level Fungsi
Konfigurasi pin dari LCD ditunjukkan pada Gambar dibawah ini:
Modul LCD memiliki karakteristik sebagai berikut:
• Terdapat 16 x 2 karakter huruf yang bisa ditampilkan.
• Setiap huruf terdiri dari 5x7 dot-matrix cursor.
• Terdapat 192 macam karakter.
• Terdapat 80 x 8 bit display RAM (maksimal 80 karakter).
• Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit.
• Dibangun dengan osilator lokal.
• Satu sumber tegangan 5 volt.
• Otomatis reset saat tegangan dihidupkan.
• Bekerja pada suhu 0oC sampai 55oC.
Pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri
dari 4-bit atau 8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4
sampai dengan DB7. Interface LCD merupakan sebuah parallel bus, dimana
hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan
penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang
8-bit dikirim ke LCD secara bit atau 8 bit pada satu waktu. Jika mode
4-bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya
8-bit (pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN
setiap nibblenya). Jalur kontrol EN digunakan untuk memberitahu LCD
bahwa mikrokontroller mengirimkan data ke LCD. Untuk mengirim data ke
LCD program harus menset EN ke kondisi high “1” dan kemudian menset
dua jalur kontrol lainnya (RS dan R/W) atau juga mengirimkan data ke jalur
Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu
beberapa saat (tergantung pada datasheet LCD), dan set EN kembali ke high
“1”. Ketika jalur RS berada dalam kondisilow “0”, data yang dikirimkan ke
LCD dianggap sebagai sebuah perintah atau instruksi khusus (seperti
bersihkan layar, posisi kursor dll). Ketika RS dalam kondisi high atau “1”,
data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar.
Misal, untuk menampilkan huruf “A” pada layar maka RS harus diset ke
“1”. Jalur kontrol R/W harus berada dalam kondisi low (0) saat informasi
pada data bus akan dituliskan ke LCD. Apabila R/W berada dalam kondisi
high“1”, maka program akan melakukan query (pembacaan) data dari LCD.
Instruksi pembacaan hanya satu, yaitu Get LCD status (membaca status
LCD), lainnya merupakan instruksi penulisan. Jadi hampir setiap aplikasi
yang menggunakan LCD, R/W selalu diset ke “0”. Jalur data dapat terdiri 4
atau 8 jalur (tergantung mode yang dipilih), DB0, DB1, DB2, DB3, DB4,
DB5, DB6 dan DB7. Mengirim data secara parallel baik 4-bit atau 8-bit
merupakan 2 mode operasi primer. Untuk membuat sebuah aplikasi
interface LCD, menentukan mode operasi merupakan hal yang paling
penting.
Mode 8-bit sangat baik digunakan ketika kecepatan menjadi
keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin
I/O (3 pin untuk kontrol, 8 pin untuk data). Sedangkan mode 4 bit minimal
hanya membutuhkan 7 pin (3 pin untuk kontrol, 4 pin untuk data). Bit RS
digunakan untuk memilih apakah data atau instruksi yang akan ditransfer
posisi kursor LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset
(RS=0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari
instruksi terakhir yang dibaca.
2.5 Relay
Relay adalah alat yang dapat bekerja secara otomatis untuk
mengontrol jaringan listrik pada sebuah sistem akibat adanya perubahan
rangkain lain pada sistem tersebut.
Di dalam sebuah relay yang perlu di perhatikan adalah rangkain
elektrik yang di gunakan di dalam pengontrolan coil relay tidak
berhubungan dengan rangkain elektrik yang terhubung dengan kontak.
Kontak bekerja berdasarkan gerak magnet yang di timbulkan oleh coil,
sehingga keadua rangkaian ini terpisah antara satu dengan yang lainya.
Rangkaian yang di gunakan untuk mengerjakan coil pada umumnya di sebut
rangkain control dan rangkain yang melalui kontak disebut rangkain beban.
Spesifiaksi coil pada relay :
1. Arus inrush
Adalah besarnya arus yang di perlukan untuk meng–energized kontak
pertama kali . Besar arus ini pada umumnya 5 kali lebih besar dari
arus sel–in. Arus sel–in, adalah besar arus minimal yang di perlukan untuk
2. Tegangan pick–up
Adalah besarnya nilai teganagan yang di perlukan untuk menarik
kontak saat coil di–energezet. Hal ini patut di perhatikan karena
fluktuatifnya nilai tegangan system.
3. Tegangan drop–out
Adalah besar tegangan yang harus di jaga oleh coil agar kontak tidak
terlepas oleh coil. Besar tegangan ini adalah 5–10% di bawah tegangan pada
coil. Jika hal ini terjadi , maka hal yang sering dijumpai adalah relay akan
bergetar dan menimbulkan suara yang kasar.
Hubungan kontak pada relay pada umumnya terdiri dari NC (normally
open) dan NO (normally close).Relay akan bekerja ketika kumparan magnit
relay mendapat sumber tegangan, kondisi ini mengakibatkan
kontak normally open dari relay bekerja, kondisi terbalik terjadi pada
normally close yang akan terbuka apabila coil pada relay mendapat sumber
tegangan yang akan mengerakkan kontak relay pada kondisi normally close.
Kondisi penyambungan pada input–input relay sangat mempengaruhi
kondisi kerja pada sistem di saat terjadi gangguan dan pada saat sistem
bekerja dalam kondisi normal. Untuk itu dalam pemasangan input maupun
output dari relay perlu di perhatikan secara khusus, karena akan
mempengaruhi kinerja maupun fungsi dari relay itu sendiri.
Relay adalah sebuah saklar yang dikendalikan oleh arus. Relay
memiliki sebuah kumparan tegangan-rendah yang dililitkan pada sebuah
inti. Terdapat sebuah armatur besi yang akan tertarik menuju inti apabila
berpegas. Ketika armatur tertarik menuju ini, kontak jalur bersama akan
berubah posisinya dari kontak normal-tertutup ke kontak normal-terbuka.
Gambar 2.10 Bentuk Fisik Relay
Sebuah relay yang tipikal dari jenis ini dapat diaktifkan dalam waktu
sekitar 10 ms.Sebagian besar relay modern ditempatkan di dalam sebuah
kemasan yang sepenuhnya tertutup rapat.
Kebanyakan di antaranya memiliki kontak-kontak jenis SPDT, namun
terdapat juga beberapa versi DPDT. Relay-relay yang berukuran lebih besar
dapat menyambungkan arus hingga 10 A pada tegangan 250 V AC.
Tegangan maksimum untuk pensaklaran DC selalu jauh lebih rendah,
seringkali bahkan hanya setengah, dari tegangan maksimum untuk AC.
Terdapat juga relay-relay miniatur yang cocok untuk ditancapkan pada
2.6 Bascom-AVR
Gambar 2.11 Interface BASCOM AVR
Pada setiap icon yang ada pada interface diatas memiliki fungsi
masing-masing. Adapun fungsi dari tiap-tiap icon fapat dilihat pada tabel di
bawah ini.
Tabel 2.2 Fungsi Icon pada Interface BASCOM AVR
Icon Nama Fungsi Shortcut
File New Membuat file baru Ctrl+N
Open File Untuk membuka file Ctrl+O
File Save Untuk menyimpan file Ctrl+S
Save as Menyimpan file dengan nama lain. -
Print Untuk mencetak dokumen Ctrl+P
Print preview Untuk melihat tampilan sebelum
dicetak.
-
Syntax check Untuk memeriksa kesalahan
bahasa.
Ctrl+F7
Show result Untuk menampilkan hasil kompile Ctrl+W
Simulate Untuk mencimulasikan program
yang dibuat.
F2
2.6.1.Karakter dalam BASCOM
Dalam program BASCOM, karakter dasarnya terdiri atas karakter
alphabet (A-Z dan a-z), karakter numeric (0-9) dan karakter spesial seperti
yang ditunjukkan pada tabel di bawah ini.
Tabel 2.3 Karakter-karakter spesial pada BASCOM
Karakter Nama
Blank atau spasi
‘ Apostrophe
* Asteriks atau simbol perkalian
+ Simbol Pertambahan (Plus Sign)
, Comma
- Simbol Pengurangan (Minus Sign)
. Period (decimal point)
/ Slash (division symbol) will be handled as \
: Colon
“ Double Quotation mark
; Semicolon
< Less than
= Equal sign (assignment symbol or relation operator)
> Greater than
2.6.2.Tipe Data
Setiap variabel dalam BASCOM memiliki tipe data yang
menunjukkan daya tampungnya. Hal ini berhubungan dengan penggunaan
memori mikrokontroler. Berikut ini adalah tipe data pada BASCOM berikut
keterangannya.
Tabel 2.4 Tipe Data BASCOM
Tipe Data Ukuran (byte) Range
Bit 1/8 0-1
Byte 1 0 sampai 255
Interger 2 -32,768 sampai 32,767
Word 2 0 sampai 65535
Long 4 -2147483648 sampai 2147483647
Single 4 -
String Hingga 254 byte -
2.6.3.Variabel
Variabel dalam sebuah program berfungsi sebagai tempat
penyimpanan data atau penampung data sementara, misalnya menampung
hasil perhitungan, menampung data hasil pembacaan register dan lain lain.
Variabel merupakan pointer yang menunjuk pada alamat memori fisik di
mikrokontroler.
Dalam BASCOM ada beberapa aturan dalam penamaan sebuah variabel.
1. Nama variabel maksimum terdiri atas 32 karakter
2. Karakter bisa berupa angka atau huruf
Variabel tidak boleh menggunakan kata-kata yang digunakan oleh
BASCOM sebagai perintah, pernyataan, internal register dan nama operator
(AND, OR, DIM, dan lainnya).
2.7 Sistem Tertanam Ethernet (Embedded Ethernet)
Embedded System yang pertama kali dikenal tahun 1961 yaitu Apollo
Guidance Komputer, yang dibuat oleh Charles Stark Draper di sebuah
laboratorium Instrumen MIT. Adalah suatu sistem atau program yang
sengaja dirancang untuk melakukan tugas yang sangat spesifik dan berulang
– ulang, dan tidak dibutuhkan kekuatan prosesor yang sangat tinggi. Dan hal
ini akan sangat menghemat biaya produksi.
Karakteristik dari embedded system adalah :
Biasanya merupakan bagian dari piranti yang besar. Dalam hal ini,
embedded system di pergunakan untuk meningkatkan kapabilitas piranti
itu sendiri. Yang dirancang khusus untuk aplikasi yang sangat spesifik.
Komponen-komponen untuk embedded system dipilih secara optimal,
yaitu yang memungkinkan implementasi sistem tersebut tetapi dengan
biaya yang serendah-rendahnya.
Embedded system merupakan real-time sistem, yaitu sistem yang
prosesnya terbatasi oleh waktu. Dan sistem tersebut harus tetap stabil
walaupun ada gangguan atau serangan.
Ethernet ini di perkenalkan tahun 1970an oleh Xerox, Setelah
dibangunnya jaringan internasional yang mampu menghubungkan antar
network) oleh Hutchison Global Communications (Hong Kong) dan KT
Corporation (Korea Selatan), maka Ethernet memiliki jangkauan yang
sangat luas. Selain itu membutuhkan biaya pembuatan dan pemeliharaan
yang relatif murah dan memberikan layanan data yang lumayan baik di
kelasnya.
Dari penjelasan mengenai Embedded System dan Ethernet diatas maka
dapat diambil kesimpulan bahwa system embedded Ethernet adalah suatu
sistem atau program yang sengaja dirancang untuk melakukan tugas yang
sangat spesifik dan berulang – ulang dan merupakan bagian dari piranti
yang sangat besar, dapat bekerja secara real time, membutuhkan biaya
pembuatan dan pemeliharaan yang relative murah, memberikan layanan data
yang lumayan baik di kelasnya dan memiliki jangkauan yang sangat luas
dengan kecepatan daya akses datanya 10 Mbps sampai 1 Gbps.
2.8 TCP / IP (Transmision Control Protokol / Internet Protokol)
TCP/IP (Transmission Control Protokol/Internet Protokol) adalah
standar komunikasi data yang digunakan oleh komunitas internet dalam
proses tukar-menukar data dari satu komputer ke komputer lain di dalam
jaringan Internet.
Arsitektur TCP/IP tidaklah berbasis model referensi tujuh lapis OSI,
tetapi menggunakan model referensi DARPA. TCP/IP yang
merngimplemenasikan arsitektur berlapis yang terdiri atas empat lapis.
Empat lapis ini, dapat dipetakan (meski tidak secara langsung) terhadap
Gambar 2.12 Perbedaan Lapisan OSI dan TCP / IP
2.9 Modul Jaringan NM7010A-LF
Modul jaringan adalah suatu perangkat keras yang digunakan untuk
menghubungkan mikrokontroler ke protokol TCP/IP, sehingga
mikrokontroler dapat diakses melalui jaringan.
Modul jaringan NM7010A-LF yang digunakan terdiri dari W3100A
(TCP/IP hardwired chip), ethernet PHY, dan MAG jack. NM7010A-LF
akan digunakan sebagai jembatan antara DT-AVR Low Cost Micro Sistem
dengan jaringan komputer dalam aplikasi web server sederhana.
Programnya dikembangkan menggunakan compiler BASCOM-AVR. Pada
compiler BASCOM-AVR ini telah terdapat perintah-perintah yang
Gambar 2.13 Modul NM7010A-LF
Modul jaringan NM7010A-LF memiliki fitur-fitur sebagai berikut.
Mendukung 10/100 base Tx, half/full duplex, dan auto-negotiation.
Sesuai standar IEEE 802.3/802.3u.
Catu daya 3,3V dengan I/O 5V tolerance.
Tersedia sinyal network status untuk indikator LED.
Protokol internet (TCP, IP Ver.4, UDP, ICMP, ARP) dan ethernet (DLC,
MAC).
Mendukung 4 buah koneksi independen (socket) secara simultan.
Antarmuka I²C dan bus Intel/Motorola dengan akses direct/indirect.
Mendukung mode clocked, non-clocked, external clocked.
Mendukung socket API untuk memudahkan pemrograman aplikasi.
2.10 Borland Delphi 7.0
Bahasa yang digunakan adalah Borland Delphi 7.0 yang merupakan
salah satu program visual yang dikembangkan oleh Borland dan
menggunakan bahasa pascal. Borland Delphi mempunyai banyak fasilitas
dan bahasa pemrograman yang relatif mudah untuk dipelajari dan
Delphi bukan hanya digunakan untuk perancangan aplikasi dekstop tetapi
juga web development.
Komponen-komponen penting yang ada dalam Delphi 7.0 dapat
dikelompokkan sebagai berikut.
Toolbar fungsinya sama seperti fungsi dari menu, hanya saja pada toolbar
pilihan-pilihan berbentuk icon.
Gambar 2.15 Toolbar
3. Component Palette
Tempat dimana kontrol-kontrol dan komponen diletakkan yang berfungsi
membantu user dalam membangun suatu aplikasi.
Gambar 2.16 Component Palette
4. Object TreeView
Tempat untuk melihat daftar dari objek-objek apa saja yang terdapat pada
Gambar 2.17 Object TreeView
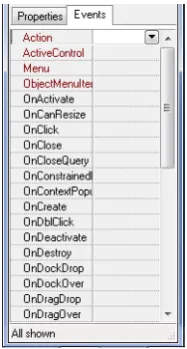
5. Object Inspector
Terdapat property dan event dari setiap objek yang ada pada form sebagai
alat untuk mengontrol.
Gambar 2.18 Object Inspector
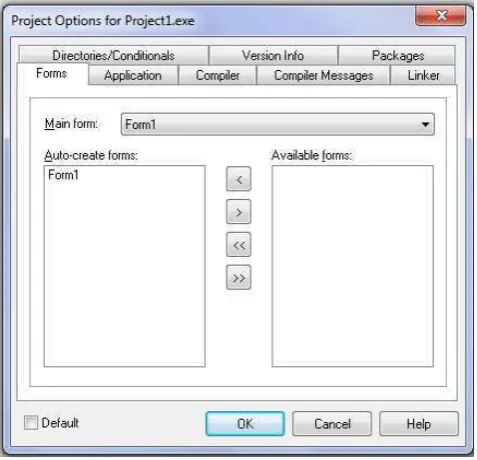
6. Project Options
Tempat untuk melihat kumpulan form, unit dan beberapa hal yang
Gambar 2.19 Project Options
7. Form
Tempat untuk mendesain suatu tampilan dari program yang akan dibuat
atau tampilan interface yang akan dihasilkan oleh program pada saat
dijalankan.
Gambar 2.20 Form
8. View Unit
Tempat untuk melihat kumpulan unit yang dibuat dalam satu program,
satu program dapat mempunyai lebih dari satu unit yang akan dijalankan.
Dalam Borland Delphi, setiap kali membuat satu form maka otomatis pula
Gambar 2.21 View Unit
9. Code Editor
Merupakan sebuah objek yang digunakan untuk menuliskan kode
program, berisi algoritma-algoritma, rumus-rumus yang akan dijalankan
pada Delphi dan akan membentuk suatu aplikasi.
Gambar 2.22 Code Editor
10.Properties
Digunakan untuk menentukan pengaturan suatu objek. Suatu objek
biasanya mempunyai beberapa properties pada jendela object inspector
Gambar 2.23 Properties
11.Events
Peristiwa atau kejadian yang diterima oleh suatu objek, misalnya klik,
drag, tunjuk dan lain-lain. Events yang diterima objek akan memicu
borland delphi untuk menjalankan kode program yang ada di dalamnya.
39
Dalam perancangan sensor monitoring level ketinggian air dan alat
pengontrol untuk mesin yang bersumber dari air sumur terdapat beberapa
pemilihan komponen yang dibandingkan untuk mendapatkan komponen sesuai
dengan spesifikasi yang diperlukan. Komponen tersebut diantaranya pemilihan
komponen Sensor Ketinggian Air, IC Regulator, dan Mikrokontroler.
3.1 Sensor Ketinggian Air
Sensor ketinggian air adalah sensor yang digunakan untuk mengukur
ketinggian air yang akan diuji. Pemilihan sensor ketinggian air meliputi
ultrasonik dan inframerah.
3.1.1 Ultrasonik
a. Pada Sumur
Perbandingan Sensor Ultrasonik untuk di Sumur sebagai berikut:
Penggunaan sensor ultrasonik yang terdapat di sumur dalam Tugas
Akhir ini berfungsi untuk mengetahui seberapa ketinggian air yang terdapat
di sumur. Berdasarkan data perbandingan pada Tabel 3.1 di atas, sensor
ultrasonik yang digunakan yaitu jenis Devantech SRF 08, meskipun sedikit
lebih mahal dibandingkan dengan pesaingnya tetapi mempunyai range jarak
yang lebih jauh yaitu tiga centimeter sampai dengan enam meter karena
sumur yang di ukur mempunyai batasan jarak maksimal enam meter.
b. Pada Tangki Penampung
Penggunaan sensor ultrasonik yang terdapat di Tangki Penampung
dalam Tugas Akhir ini berfungsi untuk mengetahui seberapa ketinggian air
yang terdapat di dalam tangki penampung. Perbandingan Sensor Ultrasonik
untuk di Tangki Penampung sebagai berikut:
Tabel 3.2 Perbandingan Sensor Ultrasonik pada Tangki Penampung Range
ultrasonik yang digunakan yaitu jenis DT Sense USIRR karena mempunyai
range yang cukup jauh yaitu dua centimeter sampai dengan tiga meter
satu setengah meter dan mempunyai harga yang lebih murah dibanding
sensor ultrasonik lainnya.
3.1.2 Inframerah
a. Transmitter
Perbandingan Sensor Inframerah untuk bagian transmitter sebagai
berikut:
Tabel 3.3 Perbandingan Sensor Inframerah bagian transmitter
(pemancar).
Price (Rp) Bentuk Fisik
IR LED 1000
IRL TRANSMITTER 7500
SFH 10500
Berdasarkan data perbandingan pada Tabel 3.3 di atas, sensor
Inframerah yang digunakan pada bagian transmitter menggunakan IR LED
karena mempunyai jarak pancar yang cukup jauh tergantung pada penguat,
lebih mudah didapatkan di pasaran, dan harganya sangat terjangkau.
b. Receiver
Perbandingan Sensor Inframerah untuk bagian receiver sebagai
berikut:
Tabel 3.4 Perbandingan Sensor Inframerah bagian receiver (penerima)
Price (Rp) Bentuk Fisik
PHOTOTRANSISTOR 3000
PHOTODIODA 2000
Berdasarkan data perbandingan pada Tabel 3.4 di atas, sensor
Inframerah yang digunakan pada bagian receiver menggunakan
phototransistor karena lebih tahan terhadap gangguan dari sinar lainnya dan
harganya lebih terjangkau.
3.2 IC Regulator (Catu Daya)
Penggunaan catu daya dalam Tugas Akhir ini sangat penting karena
berfungsi untuk menstabilkan tegangan yang nantinya akan masuk ke
rangkaian mikrokontroler dan sensor-sensor ketinggian air. Perbandingan IC
regulator sebagai berikut:
Tabel 3.5 Perbandingan IC regulator TEGANGAN 5 VOLT
LM2940 5V LM7805
Harga (Rp) 7.500 1.500
Teg Output (V) 5 5
Arus Maks (A) 1,5 1
Konfigurasi Pin IC Regulator baik seri LM2940 maupun seri LM78xx
memiliki kesamaan baik posisi input, output, maupun ground. Dalam Tugas
Akhir ini menggunakan IC regulator LM7805. Konfigurasi pin IC regulator
sebagai berikut :
3.3 Mikrokontroler
Penggunaan mikrokontroler dalam Tugas Akhir ini sangat penting
karena digunakan untuk pemrosesan data dari sensor ketinggian air dan
menampilkan pemberitahuan (display) tentang ketinggian air di LCD dan
internet.
Perbandingan Mikrokontroler AT89S51, AT89S52, ATMEGA8,
ATMEGA 8535 sebagai berikut:
Tabel 3.6 Perbandingan IC Mikrokontroler
Spesifikasi AT89S51 AT89S52 ATMEGA8 ATMEGA8535
Internal RAM (byte) 128 256 1K 512
Operating Range (V) 4,0 – 5,5 4,0 – 5,5 4,5 – 5,5 4,5 – 5,5
Write/Erase Cycles 1000 10.000 10.000 10.000
Jumlah Pin 40 40 28 40
Pin I/O 32 32 23 32
Pin ADC 0 0 6 8
Price (Rp) 12.000 12.000 25.000 39.000
Berdasarkan data perbandingan pada Tabel 3.6 di atas, tugas akhir ini
menggunakan Mikrokontroller Atmega8 karena memiliki enam pin ADC
sehingga harga lebih murah dibanding harus menggunakan ADC eksternal,
bentuk IC yang lebih kecil karena hanya meiliki 28 pin, dan alat yang dibuat
Konfigurasi pin-pin IC mikrokontroler sebagai berikut :
3.4 Modul Ethernet
Perbandingan modul ethernet sebagai berikut:
Tabel 3.7 Perbandingan Modul Ethernet
Nama Antarmuka Support Catu
Daya
Berdasarkan data perbandingan pada Tabel 3.7 di atas, tugas akhir ini
menggunakan Module Ethernet jenis NM7010A-LF karena lebih murah,
menggunakan komunikasi antarmuka I2C, dan dapat dipasangkan dengan
TCP / IP Starter Kit. TCP/IP Starter Kit berfungsi sebagai jembatan antara
mikrokontroler dengan jaringan internet atau ethernet tanpa memerlukan
BAB IV
PERANCANGAN ALAT
Pada bab ini membahas tentang perancangan alat yang dibuat. Perancangan
alat terbagi menjadi beberapa bagian seperti : perancangan blok diagram,
perancangan sensor ketinggian air, perancangan rangkaian power supply,
perancangan rangkaian sistem minimum mikrokontroler, perancangan rangkaian
downloader, perancangan box display, flowchart alat, perancangan tampilan
internet.
4.1 Blok Diagram Sistem
Blok diagram pada bagian sensor monitoring dan alat pengontrol
mesin/pompa air seperti pada Gambar 4.1 terdiri dari switch, relay, sensor
ketinggian air, mikrokontroler, dan display LCD 16x2. Pompa air dikontrol
oleh switch yang mempunyai tiga kondisi yaitu ON, OFF, dan AUTO.
Ketika keadaan ON pompa air akan langsung menyala dan menarik air dari
sumur hingga ke tangki air secara terus menerus tanpa ada batasan sampai
switch dipindahkan ke keadaan OFF atau AUTO. Ketika keadaan OFF
pompa air akan mati, sedangkan jika keadaan AUTO pompa air akan
bekerja berdasarkan dari perintah mikrokontroler yang mengolah data dari
sensor ketinggian air. Ketinggian air diukur oleh sensor ketinggian air dan
kemudian di olah oleh mikrokontroler sehingga dapat ditampilkan pada
Gambar 4.1 Blok Diagram Sensor Monitoring dan Alat Pengontrol
Gambar 4.2 adalah gambar blok diagram alat menggunakan modul
ethernet. Gambar 4.2 menjelaskan bahwa data dari bagian sensor monitoring
dan alat pengontrol diproses oleh modul ethernet NM7010. Data dari modul
ethernet kemudian dipublikasikan sehingga dapat dipantau jarak jauh
menggunakan PC atau handphone melalui internet.
Gambar 4.2 Blok Diagram Alat Menggunakan Modul Ethernet
Gambar 4.3 adalah gambar blok diagram alat menggunakan MAX
232. Gambar 4.3 menjelaskan bahwa data dari bagian sensor monitoring dan
alat pengontrol diproses oleh IC Max 232 dan masuk ke komputer server.
Komputer yang bertindak sebagai server ini bertugas untuk menyimpan data
sebelumnya dan mempublikasikan data sehingga dapat dipantau jarak jauh
Gambar 4.3 Blok Diagram Alat Menggunakan MAX 232
Pada Gambar 4.2 dan 4.3 merupakan blok diagram alat secara
keseluruhan. Pada Gambar 4.2 komunikasi antara hardware dan internet
menggunakan modul ethernet, sedangkan pada Gambar 4.3 komunikasi
antara hardware dan internet menggunakan IC MAX 232 dan melalui
komputer/PC yang berfungsi sebagai komputer server.
4.2 Perancangan Pada Bagian Sensor Ketinggian Air
Perancangan pada bagian sensor ketinggian air terdiri dari tiga macam
sensor. Ketiga macam sensor itu yaitu sensor konduktifitas kawat, sensor
inframerah, dan sensor ultrasonik.
4.2.1 Kawat Yang Dialiri Listrik
Sensor konduktifitas kawat akan bekerja ketika air merendam
dan menghubungkan listrik dari kawat yang satu ke kawat yang
lainnya yang terendam. Sedangkan kawat yang tidak terendam tidak
Gambar 4.4 Perancangan Sensor Ketinggian Air pada Sumur (kanan) dan Tangki Air (kiri) Menggunakan Kawat yang di aliri listrik.
Sensor kawat yang digunakan bertujuan untuk mendeteksi
ketinggian air yang terdapat di sumur dan di tangki air. Pada
Gambar 4.4 terdapat sembilan kawat yang digunakan untuk dapat
mendeteksi delapan level ketinggian air baik pada tangki air ataupun
pada sumur.
Gambar 4.5 Skematik Data Sensor Ketinggian Air yang Masuk ke PORTC
Gambar 4.5 merupakan rangkaian skematik antara pin mana saja
yang digunakan untuk menghubungkan kawat dan mikrokontroler.
Pada rangkaian ini menggunakan PORT A, tiga pin untuk sumur dan
empat pin lainnya untuk tangki air.
4.2.2 Inframerah
Sensor inframerah akan bekerja ketika air membawa benda
(sterofoam) mendekat sehingga memantulkan sinar inframerah.
Semakin jauh benda maka pantulan akan semakin lemah dan semakin
dekat benda maka pantulan akan semakin kuat.
Gambar 4.6 Perancangan Sensor Ketinggian Air pada Sumur (kanan) dan Tangki Air (kiri) Menggunakan Inframerah.
Sensor inframerah yang digunakan baik di sumur ataupun di
tangki penampung berjumlah dua buah agar memudahkan dalam
proses perbandingan. Dan akan menggunakan pelampung sebagai
pemantul seperti pada Gambar 4.6. Pengendalian jarak menggunakan
sensor inframerah berdasarkan dari perbedaan besar frekuensi yang
diterima oleh bagian receiver. Semakin jauh pantulan dari objek maka
Gambar 4.7 Skematik Rangkaian Inframerah
Pada gambar 4.7 menggunakan LED inframerah sebagai
pemancar dan phototransistor sebagai penerima. Data dari
phototransistor yang nantinya akan masuk ke pin-pin mikrokontroler
seperti pada Gambar 4.8.
Gambar 4.8 Skematik Data Sensor Ketinggian Air Menggunakan Inframerah yang Masuk ke PORT C
4.2.3 Ultrasonik
Sensor ultrasonik bekerja berdasarkan perbandingan dari berapa
waktu yang ditangkap setelah gelombang itu dipancarkan. Semakin
jauh benda maka waktu pantulan akan semakin lama sedangkan jika
Gambar 4.9 Perancangan Sensor Ketinggian Air pada Sumur (kanan) dan Tangki Air (kiri) Menggunakan Sensor Ultrasonik
Gambar 4.9 merupakan gambar peletakan sensor ultrasonik pada
bibir sumur dan tangki air. Sensor ultrasonik akan menghitung jarak
ketinggian sensor dengan permukaan air yang nantinya akan masuk ke
pin-pin mikrokontroler dan kemudian diproses oleh mikrokontroler
seperti pada Gambar 4.10.
Gambar 4.10 Skematik Sensor Ultrasonik pada PORTC ATmega8
4.3 Perancangan Rangkaian Power Supply
Rangkaian power supply merupakan rangkaian pengatur tegangan
yang dibutuhkan oleh rangkaian lain sehingga nantinya dapat digunakan
oleh rangkaian-rangkaian lainnya.
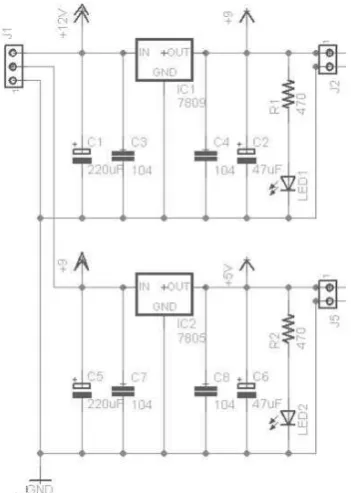
Gambar 4.11 Skematik Rangkaian Power Supply
Rangkaian power supply yang digunakan pada Gambar 4.11
menggunakan dua IC regulator, menggunakan IC LM7805 untuk keluaran
5 VDC dan IC LM7809 untuk keluaran 9 VDC. Kapasitor polar (220uF dan
47uF) berfungsi sebagai kopling, sedangkan kapasitor keramik (104)
berfungsi untuk meloloskan frekeunsi tinggi ke ground. Tegangan 5 VDC
nantinya akan digunakan untuk sumber rangkaian mikrokontroler dan LCD,
sedangkan tegangan 9 VDC digunakan untuk beberapa sensor dan relay.
4.4 Perancangan Rangkaian Sistem Minimum Mikrokontroler Atmega8
Rangkaian sistem minimum mikrokontroler merupakan rangkaian
yang bertugas untuk mengatur dan memproses input dan output data sesuai
Gambar 4.12 Skematik Rangkaian Sistem Minimum Mikrokontroler ATmega8
Rangkaian sistem minimum pada Gambar 4.12 di atas berfungsi
sebagai pengolah data dari sensor yang kemudian di tampilkan ke LCD dan
dikirim ke Max 232 kemudian ke komputer server sehingga dapat di akses
internet. PORTC nantinya akan digunakan untuk masukan data dari sensor
ketinggian air, PORTB digunakan untuk keluaran ke LCD, sedangkan
PORTD digunakan untuk pengontrol masukan dari push button ataupun
switch.
4.5 Perancangan Rangkaian Downloader
Rangkaian downloader digunakan untuk mengisi file program dari
komputer yang berbentuk heksa (.hex) ke dalam IC mikrokontroler.
Program dari komputer sebelumnya dicompile atau dibuild terlebih dahulu
Gambar 4.13 Skematik Rangkaian Downloader
Rangkaian downloader pada Gambar 4.13 digunakan untuk
mendownload file dalam bentuk format .hex dari komputer ke dalam
mikrokontroler. Downloader yang digunakan berjenis USPASP.
4.6 Perancangan Rangkaian Display
Rangkaian display merupakan gabungan beberapa rangkaian sehingga
dapat menampilkan display yang bisa memudahkan pengguna mendapatkan
informasi. Rangkaian display dapat berisi sistem minimum mikrokontroler,
LCD, tombol power, tombol reset, tombol backlight, dan switch menu untuk
Gambar 4.14 Skematik Rangkaian Display pada PORTD ATmega8
Gambar 4.14 merupakan skematik rangkaian keseluruhan yang
terdapat di dalam bagian box display. Skematik rangkaian display berisi
sistem minimum mikrokontroler ATMega8, LCD 16x2, driver relay, tombol
power, tombol reset, tombol backlight, dan switch menu untuk pompa /
mesin air.
4.7 Perancangan Box Display
Box display berupa bagian yang berfungsi untuk memudahkan
pengguna mendapatkan / melihat informasi dari ketinggian air. Tampilan
untuk pengguna ini diletakan di dalam rumah.
Terdapat LCD untuk memberikan informasi seberapa ketinggian air di
sumur dan di tangki air, tombol power untuk menyala dan mematikan
seluruh sistem, tombol backlight untuk menyalakan backlight LCD, dan
Gambar 4.15 Desain Box Display Tampak Depan
Desain box display sisi kanan terdapat empat pin data portA, empat
pin data portB, dan beberapa soket untuk supply tegangan DC seperti pada
Gambar 4.16 di bawah ini.
Gambar 4.16 Desain Box Display Samping Kanan
Desain box display sisi kiri terdapat empat pin data portA, empat pin
data portB, soket untuk supply tegangan DC, soket USB untuk pin
downloader, dan soket tegangan input DC seperti pada Gambar 4.17 di
bawah ini.
Gambar 4.18 Desain Box Display Tampak Bawah
Pada Gambar 4.18 terdapat dua soket. Pertama, soket untuk tegangan
AC yang nantinya akan mengaktifkan pompa air. Kedua, soket LAN jika
menggunakan modul ethernet NM7010 atau soket female DB9 jika
menggunakan Max 232.
4.8 Flowchart
Ketika sistem aktif, hardware akan mendeteksi apakah saklar berada
dalam posisi ON, OFF, atau AUTO. Jika berada dalam posisi ON, tegangan
AC dari mesin air akan terhubung dan mesin air akan aktif secara manual.
Jika berada dalam posisi OFF, tegangan AC dari mesin air akan terputus dan
mesin air akan mati. Sedangkan, jika saklar berada dalam keadaan AUTO
maka mesin air akan aktif sesuai dengan kondisi air dalam tangki
penampung ataupun di dalam toren.
Dalam kondisi auto, sensor ketinggian air akan mendeteksi level
ketinggian air, menampilkan level ketinggian air di LCD, mengirim data
level ketinggian ke database, dan kemudian menampilkannya di website.
Diagram alur (flowchart) dalam perancangan tugas akhir ini, seperti
4.8.1 Flowchart Mengukur Level Ketinggian Air
Setelah melakukan inisialisasi yang berisi konfigurasi pin-pin yang
digunakan oleh mikrokontroler dan mengatur variabel dari tipe data. Nilai
data dari hasil pengukuran jarak kemudian akan dimasukan dan
dikelompokan ke beberapa level ketinggian. Jika level ketinggiannya di
bawah level dua, maka alat akan memberikan peringatan bahwa kondisi air
berada dalam kondisi kurang dan pengguna harus berhemat. Diagram alur
(flowchart) bagian mengukur level ketinggian air, seperti Gambar 4.20 di
bawah ini.
Proses ukur jarak menggunakan sensor ultrasonik berdasarkan dari
besaran nilai yang terdeteksi oleh sensor ultrasonik. Besaran nilai dalam
satuan milimeter (mm). Level ketinggian dibagi berdasarkan tingkatan jarak
yang terdeteksi. Diagram alur (flowchart) proses mengukur level ketinggian
air jika menggunakan sensor ultrasonik, seperti pada Gambar 4.21 di bawah
ini.
Gambar 4.21 Flowchart Ukur Level Ketinggian Menggunakan Sensor
Ultrasonik
Proses ukur jarak menggunakan sensor kawat yang dialiri listrik
berdasarkan dari kawat mana saja yang terhubung dengan kawat ground.
Diagram alur (flowchart) proses mengukur level ketinggian air jika
menggunakan sensor kawat yang dialiri listrik, seperti pada Gambar 4.22 di
Gambar 4.22 Flowchart Ukur Level Ketinggian Menggunakan Sensor Kawat
Proses ukur jarak menggunakan sensor inframerah berdasarkan dari
besaran frekuensi yang diterima oleh bagian receiver. Diagram alur
(flowchart) proses mengukur level ketinggian air jika menggunakan sensor
inframerah, seperti pada Gambar 4.23 di bawah ini.
Gambar 4.23 Flowchart Ukur Level Ketinggian Menggunakan Sensor