COVER 1
SKRIPSI
EDIPRIN AUDRI 190821012
PROGRAM STUDI FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2021
COVER 2 SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
EDIPRIN AUDRI 190821012
PROGRAM STUDI FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2021
RANCANG BANGUN SENSOR KAPASITIF KETINGGIAN DAN SUHU AIR DI TANGKI MENGGUNAKAN SATU TRANSDUSER
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 17 Agustus 2021
Ediprin Audri
190821012
PENGESAHAN SKRIPSI
RANCANG BANGUN SENSOR KAPASITIF KETINGGIAN DAN SUHU AIR DI TANGKI MENGGUNAKAN SATU TRANSDUSER
ABSTRAK
Telah dilakukan rancang bangung sensor ketinggian dan suhu air di tangki berbasis kapasitif. Sensor ini membaca nilai ketinggian dan suhu menggunakan prinsip kapasitif yang nilai kapasitansinya berubah-ubah sesuai perubahan variabel yang diukur. Tujuan penelitian ini adalah pembuatan sebuah sensor yang hanya menggunakan satu transduser dan modul untuk mengukur ketinggian dan suhu secara bergantian. Sensor ini dirancang menggunakan dua buah plat konduktor yang disusun sejajar. Pengkondisi sinyal yang digunakan adalah rangkaian multivibrator astabil menggunakan IC NE555. Mikrokontroler yang digunakan adalah ATmega 328. Alat ini memperlihatkan hubungan antara perubahan ketinggian dengan kapasitansi dan juga perubahan suhu dengan kapasitansi. Nilai pembacaan saat variabel yang diukur berada pada nilai konstan, memperlihatkan presisi dan akurasi yang lumayan bagus.
Nilai pembacaan saat variabel yang diukur berubah-ubah, memperlihatkan kesesuaian dengan alat pembanding yang lumayan bagus.
Kata Kunci : Ketinggian dan Suhu, Mikrokontroler ATmega 328, Sensor Kapasitif, Tangki air
DESIGNING AND BUILDING A CAPACITIVE-BASED LIQUID LEVEL AND TEMPERATURE SENSOR IN WATER TANK USING
ONE TRANSDUCER
ABSTRACT
Capacitive-Based Liquid Level dan Temperature Sensor in water tank has been designed. This sensor measures a level and temperature value which its capacitance is changed according to the changing a measured variable. The purpose of this research is to make a sensor that only uses one transducer and module that measure a level dan temperature in consecutive way. This sensor is designed using two conductor plates that are arranged in parallel. The signal conditioner that is used is an astable multivibrator circuit using IC NE555. Microcontroller that is used is the ATmega 328 microcontroller. The sensor shows the relationship between the changing of level with capacitance value and also the changing of temperature with capacitance value. The sensor measurement value when the measured variable is at a constant value, shows a fairly good precision and accuracy. The sensor measurement value when the variable being measured is changed, shows a fairly good match with a another measurement tool.
Keywords : ATmega 328 microcontroller, Capasitive-Sensor, Level and Temperature, Water tank
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang dengan limpah karunia-Nya Penulis dapat menyelesaikan penyusunan laporan Tugas Akhir ini dengan Rancang Bangun Sensor Kapasitif Ketinggian dan Suhu Air di Tangki Menggunakan Satu Transduser.
Terimakasih penulis sampaikan kepada Bapak Prof. Dr. Marhaposan Situmorang selaku pembimbing yang telah meluangkan waktunya selama penyusunan skripsi ini. Terimakasih kepada Bapak Dr. Perdinan Sinuhaji, MS selaku ketua program studi dan sekretaris prodi Awan Maghfirah S.Si., M.Si. FMIPA-USU Medan, dekan dan wakil dekan FMIPA USU, seluruh staf dan dosen program studi FMIPA USU, pegawai dan rekan-rekan kuliah. Akhirnya tidak terlupakan kepada Bapak, Ibu dan keluarga yang selama ini memberikan bantuan dan dorongan yang diperlukan.
Semoga Tuhan Yang Maha Esa akan membalasnya.
Medan, 17 Agustus 2021
Ediprin Audri
DAFTAR ISI
Halaman
PENGESAHAN SKRIPSI i
ABSTRAK ii
ABSTRACT iii
PENGHARGAAN iv
DAFTAR ISI v
DAFTAR TABEL vii
DAFTAR GAMBAR viii
DAFTAR LAMPIRAN ix
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan Penelitian 2
1.5 Manfaat Penelitian 3
BAB 2 TINJAUAN PUSTAKA 4
2.1 Sensor 4
2.1.1 Definisi karakteristik kinerja sensor 4 2.1.2 Prinsip fisika dasar kapasitansi 6 2.1.3 Prinsip transduser kapasitansi dan dielektrik air 7
2.2 Pengkondisi sinyal 11
2.2.1 IC Timer 555 11
2.2.2 Astable multivibrator 12
2.3 Pemrosesan sinyal 14
2.3.1 Mikroprosesor/Mikrokontrolel ATmega328 14
2.3.2 Arduino Nano 16
BAB 3 PERANCANGAN DAN IMPLEMENTASI 20
3.1 Diagram Blok Sistem Sensor 20
3.2 Prinsip Kerja Sistem Sensor 20
3.3 Flowchart 21
3.4 Konstruksi Transduser Kapasitif 22
3.5 Gambar Rangkaian 24
3.5.1 Rangkaian ATmega328 24
3.5.2 Rangkaian Astabel Multivibrator IC NE555 25 2.5.3 Rangkaian Voltage Regulator LM2596 26
3.5.4 Rangkaian Push Button 26
3.5.5 Rangkaian LCD 27
3.5.6 Rangkaian Keseluruhan Sistem 28
3.6 Kode Sumber ATmega 328 29
BAB 4 HASIL DAN PEMBAHASAN 30
4.1 Pengujian Rangkaian Regulator 30
4.2 Pengujian Push Button 31
4.3 Pengujian Transduser/Sensor 31
4.4 Pengujian Mikrokontroler 32
4.5 Pengujian LCD 33
4.6 Pengujian Kalibrasi Sensor Kapasitif 33
4.6.1 Pengujian mode ketinggian 34
4.6.2 Pengujian mode suhu 36
4.7 Pengujian Alat Rancangan 38
4.7.1 Pengujian dynamic-state 38
4.8 Tampak Fisik Sensor 41
BAB 5 KESIMPULAN DAN SARAN 43
5.1 Kesimpulan 43
5.2 Saran 43
DAFTAR PUSTAKA 44
LAMPIRAN 45
DAFTAR TABEL
Nomor Judul Halaman
Tabel
4.1 Pengujian Rangkaian Regulator 30
4.2 Pengujian Push Button 31
4.3 Pengujian Transduser/Sensor 32
4.4 Sampel data ketinggian dengan frekuensi pada suhu 30 oC 34 4.5 Sampel data ketinggian dengan frekuensi dan kapasitansi
pada suhu 30 oC 35
4.6 Sampel data ketinggian dengan frekuensi pada
ketinggian 10 cm 37
4.7 Sampel data ketinggian dengan frekuensi dan kapasitansi
pada ketinggian 10 cm 37
4.8 Pengujian data pada suhu 30 oC 38
4.9 Pengujian data pada ketinggian 10 cm 40
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
2.1 Muatan listrik dan tegangan kapasitansi antara dua objek 8 (a); kapasitor pelat paralel (b)
2.2 Kapasitor silinder (a); Sensor perpindahan kapasitansi (b) 9
2.3 Polarisasi dari dielektrik 10
2.5 Sensor kapasitif level air (A); kapasitansi sebagai fungsi
ketinggian air (B) 11
2.6 IC NE555 12
2.7 Konfigurasi dasar Astabel (1) dan
sinyal masukkan dan keluaran (2) 13
2.8.1 Blok diagram Atmega 328 14
2.8.2 Pinout Atmega 328 SMD 15
2.8.3 Papan Arduino Nano dengan Atmega 328 16
3.1 Blok Diagram 20
3.2 Flowchart 22
3.3 Visualisasi penyimpanan muatan pada plat 23
3.4 Konstruksi Sensor Kapasitif 23
3.5 Implementasi Perancangan Sensor Kapasitif 24
3.6.1 Papan Mikrokontroler Open-Source Arduino
yang menggunakan ATmega 328 24
3.6.2 Rangkaian Astabel Multivibrator NE555 25
3.6.3 Rangkaian Voltage Regulator LM2596 26
3.6.4 Rangkaian Push Button 27
3.6.5 Rangkaian LCD 28
3.6.6 Rangkaian Keseluruhan Sistem 28
4.1 Pengujian tegangan PSU (1) dan tegangan modul regulator (2) 30
4.2 Pengujian dilepas (1), Pengujian ditekan (2) 31
4.3 Pengujian resistansi udara (1), Pengujian resistansi Leakage (2) 32
4.5 Gambar pengujian LCD 33
4.5.1 Grafik kapasitansi dan ketinggian 35
4.5.2 Grafik kapasitansi dan ketinggian sampel dan regresi linear 37
4.5.3 Grafik kapasitansi dan suhu sampel 37
4.5.4 Grafik kapasitansi dan suhu sampel dan regresi linear 38 4.6.1 Gambar pengujian level dengan suhu konstan 30 oC pada
ketinggian 15.60 cm (1) dan 13.70 cm (2) 39
4.6.2 Gambar pengujian level dengan suhu konstan 30 oC 10.70 cm 40 4.6.3 Gambar pengujian suhu dengan ketinggian 10 cm
pada nilai 49.30 oC (1) dan 48.60 oC (2) 41 4.6.4 Gambar pengujian suhu dengan ketinggian 10 cm
pada nilai 44.80 oC 41
4.7 Gambar keseluruhan sistem 42
DAFTAR LAMPIRAN
Nomor Judul Halaman
Lampiran
1. Kode sumber ATmega 328 45
2. Kode sumber pengambilan sampel 49
3. Kode sumber kalkulasi regresi linear 53
4. Datasheet ATmega 328 55
5. Datasheet NE555 62
6. Datasheet LCD 16x2 69
7. Datasheet module I2C PCF8574 78
8. Datasheet LM2596 85
9. Gambar informasi upload sketch 92
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Di dunia ini, kita dapat menjumpai banyak sensor di sekitar kita. Di kehidupan sehari-hari, banyak sekali kegiatan otomatisasi yang dapat kita temukan dan tentunya semua alat tersebut pasti dilengkapi sebuah perangkat yang kita sebut sebagai
“Sensor” ini. Cara kerja sensor menggunakan prinsip-prinsip fisika yang salah satu nya adalah sensor kapasitif. Sensor kapasitif ini dapat diterapkan untuk mengukur ketinggian cairan pada suatu wadah.
Ada beberapa penelitian tentang pembuatan sensor kapasitif yang dilakukan oleh Qurthobi, Iskandar dan Krisnatal. Dalam penelitian ini, sensor ketinggian air berdasarkan prinsip kapasitif dibuat menggunakan dua pelat tembaga dengan tinggi, lebar, dan jarak antara dua pelat berturut-turut 0,040 m, 0,015 m, dan 0,010 m (Qurthobi et al., 2016).
Kapasitansi pada sensor yang dirancang dari penelitian diatas juga berpengaruh terhadap nilai suhu diakibatkan nilai konstanta dielektrik air yang berubah akibat variasi suhu air itu sendiri (Malmberg, 1959).
Berdasarkan pada bebarapa kajian diatas, maka pada penelitian ini akan dibuat sistem sensor yang membaca kedua variabel tersebut (suhu dan ketinggian air).
Idenya di sini ialah memanfaatkan satu transduser kapasitif untuk digunakan sebagai sensor ketinggian dan suhu air secara bersama. Ini tentu menghemat penggunaan sensor yang biasanya transduser dan modul dibuat terpisah
Salah satu aplikasi yang bisa diterapkan dari perancangan sensor ini adalah sensor untuk otomatisasi pasteurisasi di perindustrian makanan dan minuman.
Pasteurisasi adalah proses di mana makanan yang dikemas dan tidak dikemas (seperti susu dan jus buah) dipanaskan dengan panas yang ringan, biasanya kurang dari 100
°C (212 °F), untuk menghilangkan patogen dan memperpanjang umur penyimpanan.
Proses ini dimaksudkan untuk menghancurkan atau menonaktifkan organisme dan enzim yang berkontribusi terhadap pembusukan atau risiko penyakit, termasuk bakteri vegetatif, tetapi bukan spora bakteri (Fellows, 2017).
Sensor ini dapat berguna pada proses pasteurisasi untuk mengukur volume susu atau jus buah di wadah penempatanya atau sebagai feedback dari sistem kontrol pompa masukan dan keluaran cairan susu atau jus buah ke wadah. Pada saat proses pemanasan, sensor juga akan mengukur suhu batas pemanasan pasteurisasi yang kemudian juga sebagai feedback dari sistem kontrol heater untuk pemanasan susu atau jus buah tersebut
1.2 Rumusan Masalah
Rumusan masalah skripsi ini diarahkan pada permasalahan berikut:
1. Bagaimana merancang transduser dua pelat konduktor.
2. Bagaimana merancang pengkondisi sinyal.
3. Bagaimana merancang pemrosesan sinyal.
1.3 Batasan Masalah
Penelitian yang dilakukan dibatasi pada ruang lingkup yang lebih rinci agar sesuai dengan topik penelitian. Adapun batasan masalah pada penelitian ini adalah:
1. Pembahasan berfokus pada pembuatan dan pengujian sensor, tidak membahas implementasi ke tangki, miniatur wadah penampung cairan dan tidak membahas pasteurisasi.
2. Cairan yang diuji adalah air biasa.
3. Sistem sensor hanya membaca ketinggian cairan dengan nilai suhu cairan tertentu (konstan), dan membaca suhu cairan dengan nilai ketinggian cairan tertentu (konstan), jadi, sistem tidak bisa membaca ketinggian dan suhu secara simultan.
4. Alat pengkalibrasi yang akan digunakan adalah sensor HC-SR04 untuk ketinggian dan sensor DS18B20 untuk suhu.
5. Range pembacaan sensor suhu hanya mencapai 10-50 oC, karena ketahanan bahan sensor terbatas diatas 50 oC dan range pembacaan ketinggian adalah 0-20 cm.
1.4 Tujuan Penelitian
Tujuan yang hendak dicapai pada Tugas Akhir ini, yaitu merancang sensor multivariabel ketinggian dan suhu memanfaatkan satu transduser kapasitif secara bersama.
1.5 Manfaat Penelitian
Adapun manfaat yang dapat diambil dari penelitian ini adalah :
1. Dapat membuat sensor multivariabel suhu dan ketinggian dengan hanya satu transduser dan modul.
2. Diharapkan sensor multivariabel ini dapat digunakan untuk pengembangan aplikasi tertentu.
BAB 2
TINJAUAN PUSTAKA
2.1 Sensor
Sensor adalah perangkat yang mengubah fenomena fisik menjadi sinyal listrik.
Sensor merupakan bagian dari antarmuka antara dunia fisik dan dunia perangkat listrik, seperti komputer. Bagian lain dari antarmuka ini diwakili oleh aktuator, yang mengubah sinyal listrik menjadi fenomena fisik. Secara umum perangkat yang mengubah energi dari satu bentuk ke bentuk lainnya disebut transduser. Biasanya transduser mengubah sinyal dalam satu bentuk energi menjadi sinyal dalam bentuk lain.
2.1.1 Definisi karakteristik kinerja sensor
Penting untuk memahami fungsi datasheet untuk dapat memahami variabilitas.
Datasheet pada dasarnya adalah dokumen pemasaran. Datasheet ini biasanya dirancang untuk menyoroti atribut positif dari sensor tertentu dan menekankan beberapa potensi penggunaan sensor, dan mungkin tidak mencamtumkan beberapa hal negatif dari karakteristik sensor yang bersangkutan. Ada beberapa karakteristik kinerja sensor yang penting diperhatikan. Berikut adalah beberapa karakteristik sensor:
a. Fungsi Transfer
Fungsi transfer menunjukkan hubungan fungsional antara input fisik sinyal dan sinyal keluaran listrik. Biasanya, hubungan ini direpresentasikan sebagai grafik yang menunjukkan hubungan antara sinyal input dan output, dan rincian hubungan ini dapat merupakan penjelasan lengkap tentang karakteristik sensor.
b. Sensitivitas
Sensitivitas didefinisikan berdasarkan hubungan antara fisik masukan sinyal dan sinyal keluaran listrik. Ini umumnya rasio antara yang perubahan sinyal listrik kecil menjadi perubahan kecil pada sinyal fisik. Dengan demikian, itu dapat dinyatakan sebagai turunan dari fungsi transfer sehubungan dengan sinyal fisik. Satuan tipikal adalah volt / kelvin, milivolt / kilopascal, dan lain-lain.
c. Span dan rentang dinamis
Kisaran sinyal fisik input yang dapat diubah menjadi sinyal listrik oleh sensor adalah rentang atau rentang dinamis. Sinyal di luar rentang ini diperkirakan menyebabkan ketidakakuratan yang sangat besar. Rentang atau dinamis ini kisaran biasanya ditentukan oleh masukkan sensor sebagai kisaran di mana lainnya karakteristik kinerja yang dijelaskan dalam lembar data diharapkan dapat diterapkan.
Satuan tipikal adalah kelvin, pascal, newton, dan lain-lain.
d. Akurasi atau Ketidakpastian
Ketidakpastian umumnya didefinisikan sebagai kesalahan yang diharapkan terbesar antara aktual dan sinyal keluaran yang ideal. Satuan tipikal adalah kelvin. Terkadang hal tersebut sebagai sebagian kecil dari keluaran skala penuh atau sebagian kecil dari pembacaan. Misalnya, atermometer mungkin dijamin akurat hingga 5% dari FSO (Skala Penuh Keluaran). "Akurasi" umumnya dianggap oleh ahli metrologi sebagai kualitatif istilah, sementara "ketidakpastian" adalah kuantitatif. Misalnya satu sensor mungkin memiliki akurasi yang lebih baik dari yang lain jika ketidakpastiannya 1%
dibandingkan dengan yang lain dengan ketidakpastian 3%.
e. Histeresis
Beberapa sensor tidak kembali ke nilai keluaran yang sama ketika masukan stimulu bernilai ke atas atau ke bawah. Lebar kesalahan yang diharapkan dalam hal yang diukur kuantitas didefinisikan sebagai histeresis. Satuan tipikal adalah kelvin atau persen FSO.
f. Nonlinier (sering disebut Linearitas)
Deviasi maksimum dari fungsi transfer linier terhadap jangkauan dinamis yang ditentukan. Ada beberapa ukuran dari kesalahan ini. Yang paling umum membandingkan fungsi transfer aktual dengan "garis lurus terbaik", yang terletak di tengah-tengah antara dua garis sejajar yang mencakup seluruh fungsi transfer selama rentang dinamis tertentu dari perangkat.
g. Kebisingan
Semua sensor menghasilkan beberapa gangguan keluaran disamping sinyal keluaran. Di dalam beberapa kasus, derau sensor lebih kecil dari derau elemen berikutnya di elektronik, atau kurang dari fluktuasi sinyal fisik, di mana kasus itu tidak penting. Banyak kasus lain ada di mana kebisingan sensor membatasi kinerja sistem
berdasarkan sensor. Kebisingan umumnya didistribusikan ke seluruh spektrum frekuensi.
h. Resolusi
Resolusi sensor didefinisikan sebagai fluktuasi sinyal minimum yang dapat dideteksi. Karena fluktuasi adalah fenomena temporal, maka ada beberapa hubungan antara skala waktu untuk fluktuasi dan amplitudo minimum yang dapat dideteksi. Oleh karena itu, definisi resolusi harus mencakup beberapa informasi tentang sifat pengukuran yang dilakukan. Banyak sensor dibatasi oleh noise dengan distribusi spektral putih. Dalam kasus ini, resolusi dapat ditentukan dalam satuan sinyal fisik / root (Hz).
i. Lebarpita
Semua sensor memiliki waktu respons yang terbatas terhadap perubahan fisik secara instan sinyal. Selain itu, banyak sensor memiliki waktu peluruhan, yang akan merepresentasikan waktu setelah perubahan langkah dalam sinyal fisik agar keluaran sensor meluruh menjadi nilai asli. Kebalikan dari waktu-waktu ini sesuai dengan atas dan bawah frekuensi cutoff, masing-masing. Lebarpita sensor adalah frekuensi jangkauan antara dua frekuensi ini (Wilson, 2005).
2.1.2 Prinsip fisika dasar kapasitansi
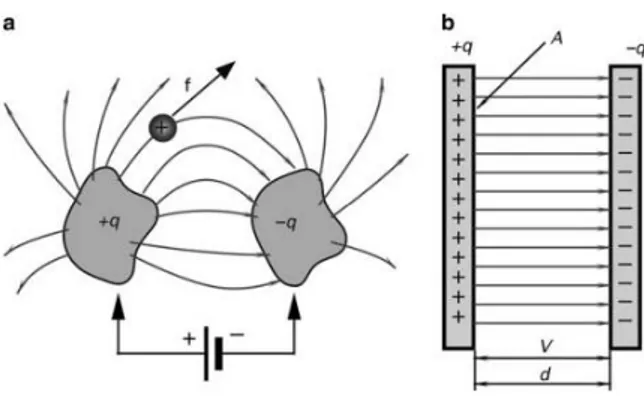
Mari kita ambil dua objek konduktif terisolasi dengan bentuk acak (pelat) dan hubungkan ke kutub berlawanan dari baterai (Gambar 2.1a). Pelat-pelat itu akan menerima jumlah muatan yang sama dan berlawanan. Artinya, pelat bermuatan negatif akan menerima elektron tambahan sementara akan ada kekurangan elektron dipelat satunya lagi yang menjadi bermuatan positif. Sekarang, mari kita lepas baterainya. Jika pelat benar-benar terisolasi dan berada dalam ruang hampa, mereka akan tetap bermuatan secara teoritis dalam waktu yang tak terhingga. Sebuah Kombinasi pelat yang dapat menahan muatan listrik disebut kapasitor. Jika sebuah muatan uji listrik positif kecil, q0, diposisikan di antara benda bermuatan, itu akan dikenakan gaya listrik dari pelat positif ke negatif. Pelat positif akan menolak muatan tes positif dan muatan negatif akan menariknya menghasilkan gaya tolak-menarik gabungan. Gaya akan memiliki nilai tertentu yang besar dan arah yang dicirikan oleh vektor f, tergantung posisi tes muatan antara objek bermuatan yang berlawanan,
Gambar 2.1 Muatan listrik dan tegangan kapasitansi antara dua objek dan kapasitor pelat paralel
Kapasitor dapat dicirikan oleh q, besarnya muatan pada salah satunya konduktor, ditunjukkan pada Gambar (2.1a), dan oleh V, perbedaan potensial positif antara konduktor. Perlu dicatat bahwa q bukanlah muatan bersih pada kapasitor dimana hasilnya adalah nol. Lebih lanjut, V bukanlah potensial kedua pelat, tetapi perbedaan potensial diantara mereka. Rasio muatan terhadap tegangan konstan untuk setiap kapasitor:
𝐶 = 𝑞
∆𝑉 (2.1)
2.1.3 Prinsip transduser kapasitansi dan dielektrik air
Untuk menghitung nilai kapasitansi, kita harus menghubungkan V, beda potensial antara pelat-pelat, ke q, muatan kapasitor sesuai persamaan (2.1):
𝐶 = 𝑞
∆𝑉 (2.2)
Alternatif lain dari nilai kapasitansi pelat datar pada vakum dapat di cari dari dengan:
𝐶 = ε0𝐴
𝑑 (2.3)
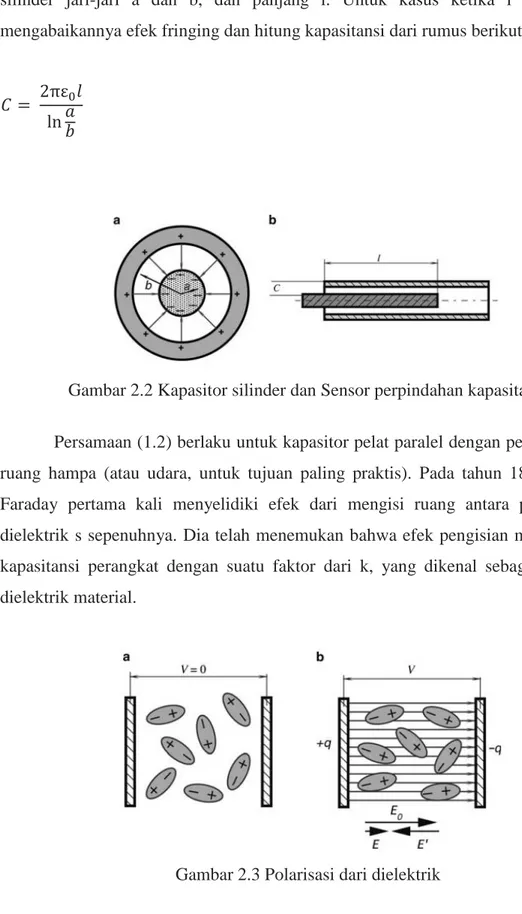
Kapasitor silinder, yang ditunjukkan pada Gambar (3.5a), terdiri dari dua koaksial silinder jari-jari a dan b, dan panjang l. Untuk kasus ketika l b, kita bisa mengabaikannya efek fringing dan hitung kapasitansi dari rumus berikut:
𝐶 = 2πε0𝑙 ln𝑎
𝑏
(2.4)
Gambar 2.2 Kapasitor silinder dan Sensor perpindahan kapasitansi
Persamaan (1.2) berlaku untuk kapasitor pelat paralel dengan pelatnya dalam ruang hampa (atau udara, untuk tujuan paling praktis). Pada tahun 1837, Michael Faraday pertama kali menyelidiki efek dari mengisi ruang antara pelat dengan dielektrik s sepenuhnya. Dia telah menemukan bahwa efek pengisian meningkatkan kapasitansi perangkat dengan suatu faktor dari k, yang dikenal sebagai konstanta dielektrik material.
Gambar 2.3 Polarisasi dari dielektrik
Medan listrik yang berkurang menyebabkan tegangan yang lebih kecil melintasi kapasitor: V ¼ Vo / k. Subtitusi menjadi rumus (2.1), kita mendapatkan ekspresi kapasitor dengan dielektrik:
𝐶 = 𝑘 𝑞
𝑉0 = 𝑘𝐶0 (2.5)
Untuk kapasitor pelat paralel kita memperoleh:
𝐶 = 𝑘𝜀0𝐴
𝑉0 (2.6)
Bentuk umum, kapasitansi antara dua objek dapat di ekspresikan secara faktor geometris, G:
𝐶 = 𝜀0𝑘𝐺 (2.7)
dimana G tergantung pada bentuk benda (pelat) dan jarak. Jadi, Rumus (2.7) menetapkan bahwa kapasitansi juga dapat dimodulasi dengan memvariasikan konstanta dielektrik k.
Konstanta dielektrik harus ditentukan untuk frekuensi dan suhu pengujian.
Beberapa dielektrik memiliki konstanta dielektrik yang sangat seragam pada rentang frekuensi yang luas (untuk Misalnya, polietilen), sementara yang lain menampilkan ketergantungan frekuensi negatif yang kuat, yaitu, konstanta dielektrik berkurang dengan frekuensi. Ketergantungan suhu juga negatif. Gambar (3.7) mengilustrasikan k untuk air sebagai fungsi suhu.
Kapasitor yang "bagus" yang digunakan dalam rangkaian elektronik, konstanta dielektrik k dan geometri G lebih baik stabil. Idealnya, mereka tidak boleh berbeda dengan suhu, kelembaban, tekanan, atau faktor lingkungan lainnya. Kapasitor yang
"bagus" adalah faktor kritis yang menentukan kualitas rangkaian elektronik.
Walapun demikian, jika ingin merancang sensor kapasitif, maka dibutuhkan kapasitory yang “buruk”, dimana nilainya bervariasi terhadap suhu, atau kelembaban arau tekanan, atau apasaja variabel yang ingin dirancang. Dengan membuat parameter
kapasitor bervariasi dengan stiumulus tertentu, dapat dibangun sebuah sensor yang berguna. Grafik fungsi pada gambar (2.4) dapat diperoleh menggunakan persamaan yang diperoleh oleh Malmberg, et al. (1956), dimana:
𝑘𝑎𝑖𝑟(𝑇) = 87. 740 − 0.400081T + 9.398(10−4)T2− 1.410(10−6)T3 (2.8)
dimana T adalah suhu air dan k adalah konstanta dielektrik air.
Gambar 2.5 Sensor kapasitif level air dan kapasitansi sebagai fungsi ketinggian air Perhatikan sensor ketinggian air kapasitif pada Gambar (2.5). Sensor tersebut dibuat dalam bentuk kapasitor koaksial dimana permukaan masing-masing konduktor dilapisi dengan lapisan isolasi tipis untuk mencegah korsleting listrik melalui air (isolator adalah dielektrik yang kita abaikan dalam analisis berikut karena memang demikian tidak berubah dalam proses pengukuran). Sensor dibenamkan ke dalam tangki air. Saat level meningkat, air mengisi lebih banyak ruang di antara sensor konduktor koaksial, sehingga mengubah konstanta dielektrik rata-rata antara konduktor dan, menurut persamaan (2.7), selanjutnya mengubah kapasitansi sensor.
Kapasitansi total sensor koaksial adalah :
𝐶ℎ = 𝐶1+ 𝐶2 = 𝜀0𝐺1+ 𝜀0𝑘𝐺2 (2.9)
di mana C1 adalah kapasitansi dari bagian sensor yang bebas air dan C2 adalah kapasitansi dari bagian berisi air. Faktor geometri yang sesuai adalah ditunjuk G1 dan G2. Dari persamaan (2.5) dan (2.9), total kapasitansi sensor dari dicari sebagai:
𝐶ℎ = 2𝜋𝜀0
ln 𝑎\𝑏[𝐻 − ℎ(1 − 𝑘)] (3.0)
di mana h adalah ketinggian dari bagian sensor yang diisi air. Jika air berada pada atau di bawah tingkat h0, kapasitansi tetap konstan karena h = 0 (Fraden, 2017).
2.2 Pengkondisi sinyal
Seorang perancang sistem jarang dapat menghubungkan sensor langsung ke pemrosesan, pemantauan, atau instrumen perekaman, kecuali sensor memiliki sirkuit elektronik built-in dengan format keluaran yang sesuai. Ketika sebuah sensor menghasilkan sinyal listrik, sinyal itu sering kali terlalu lemah, atau terlalu berisik, atau mengandung komponen yang tidak diinginkan. Selain itu, keluaran sensor mungkin tidak kompatibel dengan persyaratan masukan sistem akuisisi data, artinya, mungkin memiliki format keluaran yang salah. Untuk mencocokan sensor dan perangkat pemrosesan, keduanya harus berbagi "nilai umum". Dengan kata lain, sinyal dari sebuah sensor biasanya harus dikondisikan sebelum diumpankan ke perangkat pemrosesan (beban). Beban seperti itu biasanya membutuhkan tegangan atau arus sebagai sinyal inputnya (Lang, 2005).
2.2.1 IC Timer 555
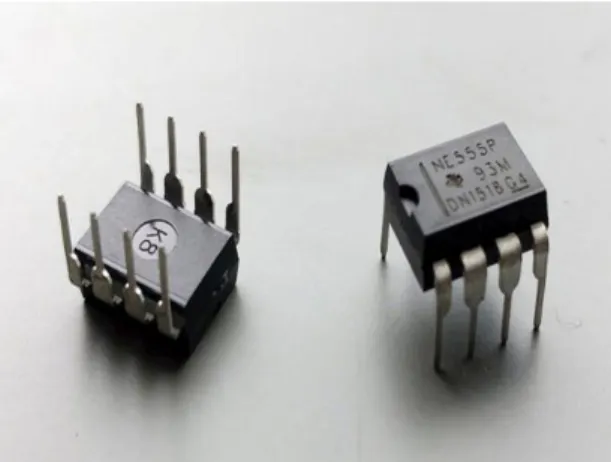
IC Timer 555 adalah elektronik multiguna yang awal, digunakan oleh produsen dan penggemar selama beberapa dekade. Ini adalah IC populer yang pernah dibuat miliaran chip Timer 555, dan lebih 900 juta chip baru diproduksi setiap tahun.membuat komponen yang satu ini menjadi pilihan para perancang elektronika untuk komponen utama maupun komponen pendukung. Dibawah ini merupakan gambar bentuk fisik dari IC 555.
Gambar 2.6 IC NE555 Ada tiga penggunaan utama pada IC 555, yaitu:
a.. Sebagai generator pulsa one-shot monostabil. Dalam mode ini, 555 dapat mengatur waktu, sakelar sentuh, pembagi frekuensi, dan banyak lagi.
b. Sebagai flip-flop bistable. Perangkat ini adalah dasar blok komputasi digital, memiliki kemampuan untuk menahan, mengatur mengatur ulang, atau beralih sedikit informasi, tergantung pada bagaimana mereka terhubung.
c. Sebagai osilator astabil. Konfigurasi IC 555 ini mengeluarkan keluaran yang berulang kali pulsa elektronik. Ini digunakan untuk menyalakan lampu, membuat nada audio, atau mengubah sinyal analog menjadi sinyal digital (Atwell, 2021).
2.2.2 Astable multivibrator
IC Timer 555 dapat digunakan sebagai multivibrator astabil yang berjalan bebas atau generator gelombang persegi dengan menggunakannya dalam konfigurasi dasar yang ditunjukkan pada Gambar 2.7 (1) di mana pin pemicu 2 disingkat ke ambang pin 6 terminal, dan resistor waktu R2 dihubungkan antara pin 6 dan debit pin 7.
(1) (2)
Gambar 2.7 Konfigurasi dasar Astabel (1) dan sinyal masukkan dan keluaran (2)
Berikut ini adalah persamaan keluaran frekuensi keluaran dari konfigurasi astabel.
𝑓 = 1.44
(𝑅1 + 2𝑅2)𝐶 (3.1) Persamaan diatas juga dapat diubah menjadi periode seperti persaman berikut ini.
𝑇 =1
𝑓 (3.2) dimana:
T = Periode (detik)
f = Frekuensi (Hz / detik-1)
Ketika daya pertama kali diterapkan ke sirkuit ini, C1 mulai mengisi secara eksponensial (dalam mode monostabil normal) melalui kombinasi seri R1 dan R2, sampai akhirnya tegangan C1 naik menjadi 2/3 Vcc. Pada saat ini aksi dasar monostabil berakhir dan pin pelepasan 7 beralih ke keadaan rendah. C1 kemudian mulai melepaskan secara eksponensial ke pin 7 melalui R2, sampai akhirnya tegangan C\ turun menjadi 1/3 Vcc, dan pin pemicu 2 adalah diaktifkan. Pada titik ini urutan waktu monostabil baru imulai, dan C1 mulai mengisi ulang menuju 2/3 Vcc melalui R1 dan R2. Keseluruhan urutan kemudian mengulangi ad infinitum, dengan Cx secara bergantian mengisi menuju 2/3 Vcc melalui R1 R2 dan pengosongan menuju 1/3 Vcc melalui R2 saja (Marston, 1990).
2.3 Pemrosesan sinyal
Peran fungsi pemrosesan sinyal khusus adalah untuk meningkatkan fleksibilitas desain perangkat penginderaan dan mewujudkan fungsi penginderaan baru. Tambahan perannya adalah untuk mengurangi beban pada unit pemrosesan pusat dan jalur transmisi sinyal dengan mendistribusikan pemrosesan informasi dalam sistem penginderaan (Yamasak, 2010).
2.3.1 Mikroprosesor/Mikrokontrolel ATmega328
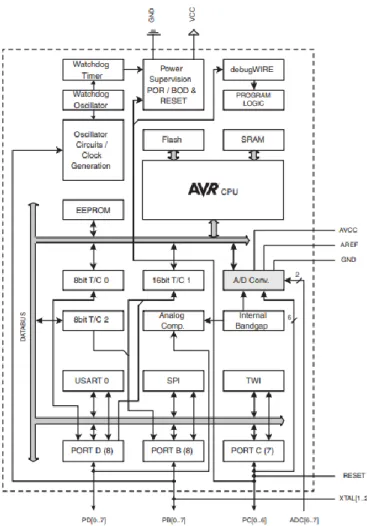
ATmega48A/48PA/88A/88PA/168A/168PA/328/328P adalah mikrokontroler 8-bit CMOS berdaya rendah berdasarkan arsitektur RISC yang ditingkatkan AVR.
Dengan mengeksekusi instruksi yang kuat dalam satu siklus clock, ATmega48A/48PA/88A/88PA/168A/168PA/328/328P mencapai through-put mendekati 1 MIPS per MHz yang memungkinkan perancang sistem untuk mengoptimalkan konsumsi daya versus kecepatan pemrosesan.
Gambar 2.8.1 Blok diagram Atmega 328
Inti AVR menggabungkan set instruksi yang kaya dengan 32 register kerja tujuan umum. Semua 32 register terhubung langsung ke Unit Logika Aritmatika (ALU), memungkinkan dua register independen untuk diakses dalam satu instruksi tunggal yang dieksekusi dalam satu siklus clock. Arsitektur yang dihasilkan lebih efisien kode sambil mencapai throughput hingga sepuluh kali lebih cepat daripada mikrokontroler CISC konvensional Atmega328P menyediakan fitur berikut:4K/8K byte In-System
Gambar 2.8.2 Pinout Atmega 328 SMD
Programmable Flash dengan kemampuan Baca-Sementara-Tulis, 256/512/512/1K byte EEPROM, 512 /1K/1K/2K byte SRAM, 23 jalur I/O tujuan umum, 32 register kerja tujuan umum, tiga Timer/Counter fleksibel dengan mode perbandingan, interupsi internal dan eksternal, USART serial yang dapat diprogram, Antarmuka Serial 2-kawat berorientasi byte, port serial SPI, ADC 10-bit 6-saluran (8 saluran dalam paket TQFP dan QFN/MLF), Watchdog Timer yang dapat diprogram dengan Osilator internal, dan lima mode hemat daya yang dapat dipilih perangkat lunak. Mode Idle menghentikan CPU sambil membiarkan SRAM, Timer/Counter, USART, 2-wireSerial Interface, port SPI, dan sistem interupsi untuk terus berfungsi.
Mode Power-down menyimpan isi register tetapi membekukan Oscillator, menonaktifkan semua fungsi chip lainnya hingga interupsi berikutnya atau reset perangkat keras. Dalam mode hemat daya, penghitung waktu asinkron terus berjalan,
memungkinkan pengguna untuk mempertahankan basis penghitung waktu saat perangkat lainnya sedang tidur. Mode ADCNoise Reduction menghentikan CPU dan semua modul I/O kecuali timer asinkron dan ADC, untuk meminimalkan noise switching selama konversi ADC. Dalam mode Siaga, crystal/resonatorOscillator berjalan saat perangkat lainnya sedang tidur. Hal ini memungkinkan start-up yang sangat cepat dikombinasikan dengan konsumsi daya yang rendah (Microchip, 2021).
2.3.2 Arduino Nano
Arduino Nano adalah papan kecil, lengkap, dan papan sistem yang mudah digunakan dimana mikrokontroler yang digunakan adalah Atmega328 (Arduino Nano 3.x). Papan ini memiliki fungsi yang kurang lebih sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Papam ini hanya tidak memiliki colokan listrik DC, dan bekerja dengan kabel USB Mini-B, bukan yang standar.
Gambar 2.8.3 Papan Arduino Nano dengan Atmega 328
a. Catu daya
Arduino Nano dapat diaktifkan melalui koneksi USB Mini-B, catu daya eksternal 6-20V yang tidak diatur (pin 30), atau catu daya eksternal yang diatur 5V (pin 27).
Sumber daya secara otomatis dipilih ke sumber tegangan tertinggi.
b. Memori
ATmega328 memiliki 32 KB, (juga dengan 2 KB yang digunakan untuk bootloader. ATmega328 memiliki 2 KB SRAM dan 1 KB EEPROM.
c. Masukkan dan Keluaran
Masing-masing dari 14 pin digital pada Nano dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Mereka beroperasi pada 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-up internal (terputus secara default) sebesar 20-50 kOhm. Selain itu, beberapa pin memiliki fungsi khusus:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) data serial TTL. Pin ini terhubung ke pin yang sesuai dari chip Serial FTDI USB-to-TTL.
2. Interupsi Eksternal: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interupsi pada nilai “LOW”, tepi naik atau turun, atau perubahan nilai.
3. PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi analogWrite().
4. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI, yang meskipun disediakan oleh perangkat keras yang mendasarinya, saat ini tidak termasuk dalam bahasa Arduino.
5. LED: 13. Ada built-in LED yang terhubung ke pin digital 13. Ketika pin bernilai HIGH, LED menyala, ketika pin LOW mati.
Nano memiliki 8 input analog, masing-masing memberikan resolusi 10 bit (yaitu 1024 nilai berbeda). Secara default mereka mengukur dari ground ke 5 volt, meskipun mungkin untuk mengubah ujung atas jangkauan mereka menggunakan fungsi analogReference(). Pin analog 6 dan 7 tidak dapat digunakan sebagai pin digital. Selain itu, beberapa pin memiliki fungsi khusus:
1. I2C: A4 (SDA) dan A5 (SCL). Mendukung komunikasi I2C (TWI) menggunakan perpustakaan Wire (dokumentasi di situs web Wiring).
Ada beberapa pin lain di papan Arduino Nano:
1. AREF. Tegangan referensi untuk input analog. Digunakan dengan analogReference ().
2. Reset. Bawa baris ini “LOW” untuk mengatur ulang mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset ke shield yang menghalangi yang ada di papan.
d. Komunikasi
Arduino Nano memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino lain, atau mikrokontroler lainnya. ATmega328 menyediakan komunikasi serial UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX).
FTDI FT232RL di papan menyalurkan komunikasi serial ini melalui USB dan driver FTDI (disertakan dengan perangkat lunak Arduino) menyediakan port com virtual ke perangkat lunak di komputer. Perangkat lunak Arduino mencakup monitor serial yang
memungkinkan data tekstual sederhana dikirim ke dan dari papan Arduino. LED RX dan TX di papan akan berkedip ketika data sedang dikirim melalui chip FTDI dan koneksi USB ke komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1).
Pustaka SoftwareSerial memungkinkan komunikasi serial pada pin digital Nano mana pun. ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Perangkat lunak Arduino menyertakan perpustakaan Kawat untuk menyederhanakan penggunaan bus I2C. Untuk menggunakan komunikasi SPI, silakan lihat lembar data ATmega328.
e. Programming
Arduino Nano dapat diprogram dengan software Arduino. Pilih "Arduino Duemilanove or Nano w/ATmega328" dari menu Tools > Board (sesuai mikrokontroler pada board anda). ATmega328 pada Arduino Nano hadir dengan bootloader yang memungkinkan Anda mengunggah kode baru ke dalamnya tanpa menggunakan pemrogram perangkat keras eksternal. Ini berkomunikasi menggunakan protokol STK500 asli. Anda juga dapat mem-bypass bootloader dan memprogram mikrokontroler melalui header ICSP (In-Circuit Serial Programming) menggunakan Arduino ISP atau sejenisnya.
f. Automatic (Software) Reset
Daripada membutuhkan penekanan fisik tombol reset sebelum mengunggah, Arduino Nano dirancang sedemikian rupa sehingga memungkinkannya untuk diatur ulang oleh perangkat lunak yang berjalan pada komputer yang terhubung. Salah satu jalur kontrol aliran perangkat keras (DTR) dari FT232RL terhubung ke jalur reset ATmega328 melalui kapasitor 100 nanofarad. Ketika garis ini ditegaskan (diambil rendah), garis reset turun cukup lama untuk mengatur ulang chip. Perangkat lunak Arduino menggunakan kemampuan ini untuk memungkinkan Anda mengunggah kode hanya dengan menekan tombol unggah di lingkungan Arduino. Pengaturan ini memiliki implikasi lain. Ketika Nano terhubung ke komputer yang menjalankan Mac OS X atau Linux, Nano akan me-reset setiap kali koneksi dibuat dari perangkat lunak (melalui USB). Selama sekitar setengah detik berikutnya, bootloader berjalan di Nano.
Meskipun diprogram untuk mengabaikan data yang cacat (yaitu apa pun selain unggahan kode baru), ia akan mencegat beberapa byte pertama data yang dikirim ke papan setelah koneksi dibuka. Jika sketsa yang berjalan di papan menerima konfigurasi satu kali atau data lain saat pertama kali dimulai, pastikan bahwa perangkat lunak yang
berkomunikasi dengannya menunggu beberapa detik setelah membuka koneksi dan sebelum mengirim data ini (Arduino, 2021).
BAB 3
PERANCANGAN DAN IMPLEMENTASI
3.1 Diagram Blok Sistem Sensor
Untuk mempermudah dalam mempelajari dan memahami cara kerja alat ini, maka sistem perancangan dibuat berdasarkan diagram blok dimana tiap blok mempunyai fungsi dan cara kerja tertentu. Adapun diagram blok dari sistem yang dirancang adalah sebagai berikut.
Gambar 3.1 Blok Diagram 3.2 Prinsip Kerja Sistem Sensor
Berikut deskripsi setiap blok:
1. Transduser kapasitif dirancang dengan bentuk kapasitor berpelat paralel dengan tinggi 20 cm yang dilapisi polyester. Di sela-sela pelat paralel diberikan celah, supaya air bisa masuk apabila transduser tersebut di celupkan kedalam air.
Kehadiran air tersebut dijadikan sebagai bahan dielektrik transduser kapasitor.
Karena geometris kapasitor tidak bergerak, maka besar kapasitansi hanya bergantung kepada dielektrik. Variasi pelat paralel kapasitor yang tercelup mewakili ketinggian air di sebuah wadah. Variasi ini membuat dielektrik pelat-pelat kapasitor yang terkena air dan tidak (udara), menjadi berubah-ubah. Kita bisa mengambil kesimpulan bahwa perubahan ketinggian air, mengubah nilai kapasitansi. Disisi lain, dielektrik air juga sebenarnya bisa berubah tergantung suhu air itu sendiri. Kesimpulan selanjutnya kita dapatkan bahwa, perubahan suhu air mempengaruhi nilai kapasitansi. Sekarang kita dapatkan sebuah fungsi keluaran
multivariabel kapasitansi (besaran fenomena listrik, “Coloumb/Volt”) terhadap masukan suhu (besaran fenomena termal , “Kelvin”) dan ketinggian air (besaran dimensi, “meter”).
2. Pengkondisi sinyal terdiri dari rangkaian osilator menggunakan IC NE555.
Rangkaian yang di rancang ialah mode Astabel dimana pin discharge, trigger, dan threshold dihubungkan ke rangkaian RC (Resistor-Capasitor) sedemikian rupa.
Keluaran dari IC NE555 berupa gelombang square-wave yang mempunyai periode.
Konfigurasi nilai-nilai resistor-resistor dan kapasitor-kapasitor mempengaruhi periode gelombang sqare-wave. Kapasitor ini diganti menjadi transduser kapasitif yang sudah dibahas sebelumnya. Sekarang kita dapatkan sebuah fungsi keluaran multivariabel periode gelombang square-wave (besaran fenomena gelombang,
“waktu/periode”) terhadap masukan suhu (besaran fenomena termal , “Kelvin”) dan ketinggian air (besaran dimensi, “meter”).
3. Di bagian pemrosesan sinyal, mikrokontroler ATmega328 mempunya modul Timer yang bisa diubah menjadi mode counter (pencacah). Keluaran dari pengkondisi sinyal (NE555) terhubung ke salah satu pin “Digital” ATmega328 yang berfungsi untuk menerima gelombang sqare-wave. Semakin besar frekuensi, maka pencacahan juga semakin banyak. Mikrokontroler akan mengkalkulasi nilai tersebut sehingga diperoleh nilai kapasitansi menggunakan parameter-parameter di rangkaian multivibrator astabel.
4. Setelah pemrosesan sinyal oleh mikrokontroler ATmega328 dilakukan, maka nilai kapasitor akan proses menjadi nilai ketinggian dan suhu menggunakan persamaan regresi linear dan menampilkan ke LCD.
3.3 Flowchart
Flowchart adalah adalah suatu bagan dengan simbol-simbol tertentu yang menggambarkan urutan proses secara mendetail dan hubungan antara suatu proses (instruksi) dengan proses lainnya dalam suatu program. Dalam pembuatan sistem yang dilakukan menghasilkan flowchart sebagai berikut.
Gambar 3.2 Flowchart 3.4 Konstruksi Transduser Kapasitif
Sensor kapasitif dibangun dengan dua plat konduktif (Gambar 3.3). Kedua plat mempunyai kemampuan untuk menyimpan muatan listrik. Nilai dari kapasitor C diperoleh dari persamaan (1): dimana 𝑙 adalah jarak antara kedua plat, dan 𝜀 adalah konstanta dielektrik dari material insulator antara kedua plat (dimana terdiri dari 𝜀0 (permitivitas vakum) dan 𝜀𝑟 (permitivitas relatif). Persamaan dibawah ini sudah dijelaskan di tinjauan pustaka.
𝐶 = 𝜀𝐴
𝑙 (1) 𝐶 = 𝜀0𝜀𝑟𝐴
𝑙 (2)
Berikut gambar visualisasi penyimpanan muatan pada plat sesuai dengan persamaan diatas.
Gambar 3.3 Visualisasi penyimpanan muatan pada plat
Bahan yang dipilih ialah sebuah papan PCB yang dibagi dua (Gambar 3.4), sehingga menghasilkan 2 bagian persegi panjang dengan panjang 20 cm dan lebar 4 cm. Tembaga ataupun konduktor di bentuk sehingga mempunya lebar 2 cm. Pada sensor tersebut, dibuat sebuah terminal untuk koneksi ke rangkaian pengkondisi sinyal. Untuk membentuk sebuah pelat sejajar dari kedua papan tersebut, maka diikat menggunakan mur dan baut. Agar tidak terjadi hubungan singkat dari kedua konduktor melalui air, maka kedua plat di lapisi dengan polyester resin. Setelah kedua konstruksi sensor sudah selesai, maka sensor tersebut akan di cepulkan ke wadap penampung air dan implementasi dari perancangan dapat dilihat pada Gambar 3.6. Berikut gambar konstruksi dan implementasi sensor.
Gambar 3.4 Konstruksi Sensor Kapasitif
Gambar 3.5 Implementasi Perancangan Sensor Kapasitif 3.5 Gambar Rangkaian
3.5.1 Rangkaian ATmega328
Rangkaian ini terdiri dari papan minimum-system mikrokontroler open-source yang dikembangkan oleh Arduino.cc yang menggunakan ATmega 328 sebagai mikrokontolernya. Rangkaian ini berfungsi sebagai pemrosesan nilai keluaran dari rangkaian astabel multivibrator NE555 yang akan mengubah ke nilai pembacaan kapasitansi sensor. Konektor USB mikrokontroler akan terhubung ke port USB komputer sebagai keluaran dari rangkaian miktrokontroler menggunakan komunikasi serial. Berikut gambar skematik dari rangkaian ATmega 328.
Gambar 3.6.1 Papan Mikrokontroler Open-Source Arduino yang menggunakan ATmega 328
3.5.2 Rangkaian Astabel Multivibrator IC NE555
Rangkaian ini berfungsi untuk pengkondisi sinyal sensor kapasitif dimana transduser (sensor) tersebut termasuk kategori transduser aktif yang membutuhkan sumber sinyal eksitasi dari luar. Rangkaian ini akan mengubah nilai kapasitor menjadi frekuensi pulsa. Konektor berlabel “SENSOR” akan terhubung ke terminal sensor kapasitif seperti yang telah dijelaskan pada sub bab konstruksi transduser kapasitif.
Konektor berlabel “out” akan dihubungkan ke pin “Digital” ATmega328 sebagai keluaran nilai frekuensi. Dimana antarmuka antara pengkondisi sinyal dengan pemrosesan sinyal (mikrokontroler) adalah pembacaan nilai ketukan pulsa frekuensi rangkaian ini per 100 milidetik sebagai mana tertera di flowchart. Rangkaian ini di beri tegangan dengan 5 V dari papan mikrokontroler open-source Arduino.cc. Berikut gambar skematik dari rangkaian Astabel Multivibrator.
Gambar 3.6.2 Rangkaian Astabel Multivibrator NE555
Nilai keluaran frekuensi yang diperoleh dari persamaan (3.1) di bab 2 tinjauan pustaka adalah sebagai berikut:
𝑓 = 1.44
(𝑅1 + 2𝑅2)𝐶 (3.1) Dimana:
R1 = 10 kΩ, R2 = 10 kΩ, dan
C = nilai kapasitansi dari sensor yang terhubung ke konektor “ SENSOR”.
Karena nilai R1 dan R2 mempengaruhi nilai kapasitor, maka pemilihan resistor-resistor ini harus dipertimbangkan. Untuk pemilihan nilai R1 dan R2 adalah pertimbangan jumlah frekuensi yang akan dibaca oleh mikrokontroler. Mikrokontroler punya batasan maksimal pembacaan frekuensi, maka frekuensi saat nilai sensor kapasitif pada nilai minimal (frekuensi maksimal) harus diatur supaya pembacaan frekuensi tidak melebihi batas pembacaan miktrokontroler. Sedangkan jika frekuensi yang sedikit akan membuat pembacaan menjadi lambat juga, mengakibatkan keterlambatan pengiriman informasi dari sensor ke mikrokontroler. Maka pemilihan yang tepat adalah frekuensi pada nilai maksimal dan minimal yang cukup tunggi tetapi sedikit dibawah batas maksimal dari mikrokontoler. Maka pemilihan nilai R1 = 10 kΩ dan R2 = 10 kΩ.
2.5.3 Rangkaian Voltage Regulator LM2596
Rangkaian ini berfungsi untuk menurunkan tegangan input dari PSU 10 V menjadi 5 V. Mikrokontroler ATmega 328 memerlukan sumber tengangan sebesar 5 V agar berfungsi dengan baik. Rangkaian ini terdiri dari module LM2596 sebagai modul yang menurunkan tegangan dari PSU 10 V. Keluaran dari LM2596 terhubung ke pin Vin ATmega 328 dimana pin tersebut adalah masukkan sumber tegangan mikrokontroler. Berikut gambar skematik dari rangkaian voltage regulator.
Gambar 3.6.3 Rangkaian Voltage Regulator LM2596 3.5.4 Rangkaian Push Button
Rangkaian ini berfungsi untuk memberikan sinyal ke mikrokontroler untuk memilih pembacaan mode level atau suhu. Jika tombol ditekan bergantian maka
pembacaan akan bergantian antara mode level dan suhu. Rangkaian push button akan terhubung ke pin D4. Berikut gambar skematik dari rangkaian push button.
Gambar 3.6.4 Rangkaian Push Button 3.5.5 Rangkaian LCD
Rangkaian ini berfungsi untuk menampilkan hasil proses perhitungan ketinggian dan suhu dari ATmega 328. Rangkaian LCD terdiri dari modul I2C Remote 8-bit I/O Expander PCF8574 atau LCD-I2C-Converter dan LCD Display 16x2.
Penggunaan Module I2C Expander berguna untuk membuat penggunaan pin-pin ATmega 328 menjadi sedikit. ATmega 328 mengirim tampilan ke LCD menggunakan komunikasi I2C ke modul I2C expander, dimana dari modul ini akan mengirim data ke LCD. Pin-pin LCD Display terhubung dengan modul I2C. Kemudian, pin SCL terhubung ke A5 dan SDA terhubung ke SCL. Berikut gambar skematik dari rangkaian LCD.
Gambar 3.6.5 Rangkaian LCD 3.5.6 Rangkaian Keseluruhan Sistem
Pada rangkaian ini terdapat penggabungan beberapa rangkaian, yaitu rangkaian regulator, rangkaian LCD, rangkaian puah button, dan rangkaian IC NE555.
Rangkaian ini membentuk suatu alat yaitu sistem “Rancang Bangun Sensor Kapasitif Ketinggian Dan Suhu Air Di Tangki Menggunakan Satu Transduser” Fungsi dari rangkaian ini adalah untuk mendapatkan nilai ketinggian dan suhu cairan dan menampilkanya ke LCD. Berikut merupak rangkaian keseluruhan pada sistem alat yang akan dibuat:
Gambar 3.6.6 Rangkaian Keseluruhan Sistem
3.6 Kode Sumber ATmega 328
Adapun program yang ditulis menggunakan bahasa pemrograman C++ untuk pembacaan frekuensi, pengubahan nilai ke kapasitansi, dan lain-lain adalah (terlampir).
BAB 4
HASIL DAN PEMBAHASAN
4.1 Pengujian Rangkaian Regulator
Pengujian rangkaian regulator adalah pengujian tegangan keluaran yang telah di turunkan oleh modul tersebut terhadap tegangan masukkan dari PSU 10 V. Pengujian menggunakan multimeter untuk mengukur tegangan. Berikut tabel hasil pengujian tegangan.
Tabel 4.1 Pengujian Rangkaian Regulator
Tegangan PSU (V) Tegangan Keluaran (V)
10.95 5.0
Tegangan PSU yang terbaca multimeter adalah sebesar 10.95 V dimana tegangan ini adalah sumber daya yang digunakan untuk keseluruhan rangkaian. Setelah melewati modul regulator, tegangan yang dihasilkan adalah 5.0 V. Berikut tampilan hasil pengukuran menggunakan multimeter. Gambar (1) adalah tegangan dari PSU dan Gambar (2) adalah tegangan dari modul regulator.
(1) (2)
Gambar 4.1 Pengujian tegangan PSU (1) dan tegangan modul regulator (2)
4.2 Pengujian Push Button
Pengujian rangkaian ini adalah pengujian apakah ATmega 328 mengirim sinyal mode level atau suhu ke mikrokontroler setelah push button di tekan. Pengujian akan dilihat dari tegangan melalui multimeter. Berikut tabel hasil pengujian pushbutton.
Tabel 4.2 Pengujian Push Button
Kondisi Tegangan (V)
DITEKAN 4.70
DILEPAS 0.0
Pada kondisi push button dilepas, multimeter menampilkan tegangan 0 V. Sesuai dengan tegangan isyarat “LOW” pada miktrokontroler ATmega 328 yaitu tegangan 0.
Dan saat kondisi push button ditekan, multimeter membaca tegangan sebesar 4.70 V.
Isyarat “HIGH” pada mikrokontroler ATmega 328 adalah 5 V, tapi mikrokontroler ATmega 328 mentolerir diatas tegangan 3.3V sebagai isyarat “HIGH”. Pengujian ini berjalan dengan semestinya. Berikut tampilan gambar saat pengujian menggunakan multimeter. Gambar (1) adalah kondisi pushbutton dilepas dan Gambar (2) adalah kondisi pushbutton ditekan.
(1) (2)
Gambar 4.2 Pengujian dilepas (1), Pengujian ditekan (2) 4.3 Pengujian Transduser/Sensor
Pengujian yang diuji pada sensor kapasitor adalah resistansi bocor antara kedua pelat yang dilapisi resin sebagai insolator (leakeage rasistance). Material yang memisahkan plat-plat kapasitor seharusnya terisolasi atau arus tidak mengalir melalui
insulator. Tapi tidak semua insulator sempurna ataupun pada saat pembuatan sensor terjadi ketidaksempurnaan dalam melapisi kedua pelat dengan polyester resin sehingga air menuju celah-celah lapisan resin tersebut. Pengujian menggunakan multimeter untuk mengukur resistansi antara kedua terminal di sensor. Berikut tabel hasil pengujian resistansi kebocoran.
Tabel 4.3 Pengujian Transduser/Sensor
Objek Resistansi (Ohm)
Udara ∞
Sensor ∞
Pada saat probe multimeter tidak ditempelkan ke benda apapun atau ke udara, multimeter membaca nilai resistansi yang tidak terhingga. Ini bersesuaian dengan pengukuran untuk pengujian resistansi leakage pada sensor yang memperlihatkan nilai tak terhingga, dimana nilai tersebut sesuai yang diharapkan. Berikut tampilan pengujian menggunakan multimeter.
(1) (2)
Gambar 4.3 Pengujian resistansi udara (1), Pengujian resistansi Leakage (2) 4.4 Pengujian Mikrokontroler
Pengujian rangkaian miktrokontroler ini bertujuan untuk mengetahui apakah papan minimum-system dengan ATmega328 tersebut dapat bekerja dengan baik.
Pengujian pada rangkaian ini adalah dengan membaca keberhasilan meng-upload sketch program ke mikrokontroler yang tampil di informasi aplikasi Arduino IDE.
Berikut tampilan hasil pengujian ATmega 328 (terlampir).
Terlihat pada gambar diatas bahwa sketch atau kode program berhasil di upload ke mikrokontroler. Maka, pengujian ini berhasil dilakukan dan mikrokontroler siap menerima kode program selanjutnya.
4.5 Pengujian LCD
Pengujian LCD bertujuan untuk melihat tampilan layar apakah sesuai program yang di masukkan dari ATmega 328. Pengujian dilakukan dengan menampilkan kata
“Hello, World!”. Berikut tampilan hasil pengujian LCD.
Gambar 4.4 Gambar pengujian LCD
Terlihat pada Gambar 4.4, LCD menampilkan kata-kata “Hello, World!”. Maka pengujian LCD berhasil dilakukan.
4.6 Pengujian Kalibrasi Sensor Kapasitif
Kalibrasi sensor dilakukan dengan mengukur nilai ketinggian menggunakan HC- SR04, nilai suhu menggunakan DS18B20, dan nilai kapasitansi menggunakan alat buatan. Pengujian dilakukan dengan mengambil sampel bersamaan dari alat buatan dari mikrokontroler ATmega 328 dengan HC-SR04 dan DS18B20 yang sebagai alat pembanding, dimana alat pembanding ini juga terhubung ke ATmega 328 yang lain.
Tujuan dari ATmega 328 yang terhubung ke alat pembanding ini supaya dapat di kirim secara digital ke komputer dan dapat mengambil sampel data sebanyak-banyaknya.
Grafik dari hasil pembacaan dengan alat pembanding ini akan di plot ke grafik. Dan juga alat pembanding manual yang akan di pakai untuk ketinggian adalah penggaris dan untuk suhu adalah termometer.
Rancang bangun ini hanya membaca ketinggian dan suhu secara terpisah. Artinya bahwa jika mengukur ketinggian, maka suhu harus dijaga konstan. Jika mengukur suhu, maka ketinggian harus di jaga konstant. Sesuai batasan masalah yang sudah diutarakan pada bab 1. Pengambilan data sampel untuk ketinggian, maka suhu yang di ambil adalah 30 oC. Pengambilan data sampel untuk suhu, maka ketinggian yang di ambil adalah 10 cm. Hasil sampel ini akan digunakan untuk pengujian alat rancangan tahap akhir.
Data sampel ini ditulis ke file CSV sebagai dataset dengan menggunakan bahasa pemrograman Python. Perhitungan untuk mengubah nilai kapasitansi menjadi ketinggian dan suhu menggunakan regresi linear didapat dari sampel file CSV yang telah di ambil dengan bahasa pemrograman Python.
Adapun program yang ditulis menggunakan bahasa pemrograman Python untuk pengambilan sampel dan mencari regresi ini adalah (terlampir).
4.6.1 Pengujian mode ketinggian
Disini data sampel yang akan diambil adalah frekuensi. Nilai frekuensi ini didapat langsung dari mikrokontroler ATmega 328 setelah mikrokontroler ini membaca frekuensi dari rangkaian Astable Multivibrator NE555. Data dibawah ini adalah sedikit cuplikan tabel dari data sampel.
Tabel 4.4 Sampel data ketinggian dengan frekuensi pada suhu 30 oC
HC-SR04 (cm) Alat Rancang
Frekuensi (kHz)
15 133.645
13 144.456
10 165.820
8 183.634
5 215.915
Pada tabel diatas memperlihatkan sampel yang diambil bersamaan dengan sensor jarak HC-SR04 dan alat yang dirancang. Terlihat perubahan ketinggian mempengaruhi nilai frekuensi pada sensor kapasitif.
Selanjutnya nilai frekuensi diubah ke nliai kapasitansi. Persamaan untuk mengubah nilai frekuensi menjadi nilai kapasitansi sebagai berikut.
Sesuai persamaan (3.1) di bab 2, maka untuk mendapatkan nilai C adalah:
𝑓 = 1.44
(𝑅1 + 2𝑅2)𝐶 (3.1) 𝐶 = 1.44
(𝑅1 + 2𝑅2)𝑓 (4.0) Persamaan ini sudah diterpakan di kode program mikrokontroler sebagaimana terlampir sehingga nilai yang terulis ke file CSV adalah nilai perhitungan kapasitansi.
Berikut tabel setelah mendapatkan nilai kapasitansi.
Tabel 4.5 Sampel data ketinggian dengan frekuensi dan kapasitansi pada suhu 30 oC
HC-SR04 (cm) Alat Rancang
Frekuensi (kHz) Kapasitansi (pF)
15 133.645 360
13 144.456 330
10 165.820 290
8 183.634 260
5 215.915 220
Plat-plat kapasitif yang terkena air secara variatif dari ketinggian 15 cm sampai 5 cm mempengaruhi nilai kapasitansi sensor yang secara variatif dari 360 pF sampai 220 pF. Terlihat nilai ketinggian berbanding lurus dengan nilai kapasitansi. Dataset pengambilan sampel diatas adalah cuplikan sedikit dari sampel yang diambil dari file CSV. Berikut tampilan grafik nilai ketinggan dengan kapasitansi dari dataset file CSV.
Gambar 4.5.1 Grafik kapasitansi dan ketinggian
Setelah mendapatkan nilai kapasitansi dengan nilai ketinggian dan disimpan di file CSV, selanjutnya dataset file CSV tersebut di hitung fungsi regresi linear menggunakan program komputer. Linear regresi yang diperoleh sebagai berikut.
𝑓(𝑥) = 0.08𝑥 − 12.63
Fungsi diatas adalah regresi linear untuk mode pembacaan ketinggian. Variabel dependen ialah nilai ketinggian sedangkan variabel independen ialah nilai kapasitansi.
Terlihat bahwa perubahan ketinggian per nilai kapasitansi sebesar 0.08 cm/pF dan garis perpotongan sebesar – 12.63 cm. Fungsi ini akan dimasukkan ke program ATmega 328 sebagaimana terlampir. Berikut tampilan grafik antara sampel dari file CSV dan hasil regresi linear dimana grafik warna biru adalah grafik sampel serta warna merah adalah grafik regresi linear.
Gambar 4.5.2 Grafik kapasitansi dan ketinggian sampel dan regresi linear 4.6.2 Pengujian mode suhu
Sama seperti pengujian mode ketinggian, data dibawah ini adalah sedikit cuplikan dari data sampel berupa nilai frekuensi untuk suhu.
Tabel 4.6 Sampel data ketinggian dengan frekuensi pada ketinggian 10 cm
DS18B20 (oC) Alat Rancang (kHz)
44.87 154.839
43.99 155.340
42.93 155.844
41.8 156.863
41.05 157.377
Sama seperti mode ketinggian, nilai frekuensi tersebut diubah ke nilai kapasitansi menggunakan persamaan 4.0. Berikut tabel setelah mendapatkan nilai kapasitansi.
Tabel 4.7 Sampel data ketinggian dengan frekuensi dan kapasitansi pada ketinggian 10 cm
DS18B20 (oC) Alat Rancang
Frekuensi (kHz) Kapasitansi (pF)
44.87 154.839 310
43.99 155.340 309
42.93 155.844 308
41.8 156.863 306
41.05 157.377 305
Plat-plat kapasitif yang terkena air dengan ketinggian konstan dan suhu air secara variatif dari 44.12 oC sampai 34.05 oC mempengaruhi nilai kapasitansi sensor yang secara variatif dari 295.5 pF sampai 285.2 pF. Terlihat nilai suhu berbanding lurus dengan nilai kapasitansi. Dataset pengambilan sampel diatas adalah cuplikan sedikit dari sampel. Berikut tampilan grafik nilai suhu dengan kapasitansi.
Gambar 4.5.3 Grafik kapasitansi dan suhu sampel
Sama seperti pembacaan ketinggian, setelah mendapatkan nilai kapasitansi dengan nilai suhu dan disimpan di file CSV, selanjutnya dataset file CSV tersebut di hitung fungsi regresi linear menggunakan program komputer. Linear regresi yang diperoleh sebagai berikut.
𝑓(𝑥) = 1.0𝑥 − 250.96
Fungsi diatas adalah regresi linear untuk mode pembacaan suhu. Variabel dependen ialah nilai suhu sedangkan variabel independen ialah nilai kapasitansi. Terlihat bahwa perubahan ketinggian per nilai kapasitansi sebesar 1.0 oC/pF dan garis perpotongan sebesar –250.96 oC. Fungsi ini akan dimasukkan ke program ATmega 328 sebagaimana terlampir. Berikut tampilan grafik antara sampel dari file CSV dan hasil
regresi linear dimana grafik warna biru adalah grafik sampel serta warna merah adalah grafik regresi linear.
Gambar 4.5.4 Grafik kapasitansi dan suhu sampel dan regresi linear 4.7 Pengujian Alat Rancangan
Pengujian ini dilakukan untuk tahap akhir setelah semua sistem sudah siap di operasikan. Masukkan dari sensor kapasitif berupa nilai kapasitansi akan dihitung menjadi nilai ketinggain dan suhu menggunakan kedua fungsi regresi linear yang telah didapat diatas, kemudian nilai tersebut akan ditampilkan ke LCD.
4.7.1 Pengujian dynamic-state
Pengujian dynamic-state adalah pengujian dimana variabel yang akan diuji berubah-ubah. Rancang bangun ini hanya membaca ketinggian dan suhu secara terpisah. Artinya bahwa jika mengukur ketinggian, maka suhu harus dijaga konstan.
Jika mengukur suhu, maka ketinggian harus di jaga konstant. Sesuai batasan masalah yang sudah diutarakan pada bab 1. Pengujian untuk ketinggian, maka suhu yang di ambil adalah 30 oC. Pengujian untuk suhu, maka ketinggian yang di ambil adalah 10 cm. Sampel pengujian yang ditampilkan pada pembahasan ini sebanyak 3 sampel.
1. Pengujian ketinggian
Berikut tabel hasil pengujian pembacaan ketinggian.
Tabel 4.8 Pengujian data pada suhu 30 oC
Penggaris (cm) Alat Rancang (cm) Ralat (%)
15.60 15.40 1.28
13.70 13.65 0.36
10.70 10.55 1.40
Ralat rata-rata % 1.01
Hasil pengukuran mode ketinggian dapat dilihat pada tabel diatas. Pencarian ralat dalam persen didapat dari rumus dibawah ini.
𝑒𝑟𝑟𝑜𝑟 (%) = |𝑁𝑖𝑙𝑎𝑖 𝐴𝑠𝑙𝑖 (𝑃𝑒𝑛𝑔𝑔𝑎𝑟𝑖𝑠) − 𝑁𝑖𝑙𝑎𝑖 𝑈𝑘𝑢𝑟 (𝐴𝑙𝑎𝑡 𝑟𝑎𝑛𝑐𝑎𝑛𝑔)
𝑁𝑖𝑙𝑎𝑖 𝐴𝑠𝑙𝑖 (𝑃𝑒𝑛𝑔𝑔𝑎𝑟𝑖𝑠) | × 100%
Dibawah ini adalah rumus untuk memperoleh rata-rata ralat.
𝑒𝑟𝑟𝑜𝑟 (%) =1
𝑛∑ 𝑒𝑟𝑟𝑜𝑟𝑖
𝑛
𝑖=0
= 𝑒𝑟𝑟𝑜𝑟0+ 𝑒𝑟𝑟𝑜𝑟1+ ⋯ + 𝑒𝑟𝑟𝑜𝑟𝑛 𝑛
Setelah mengatur ketinggian level cairan di wadah di nilai 15.60 cm untuk sampel 1, sensor pada mode pembacaan level membaca nilai sebesar 15.40 cm. Terjadi ralat sebesar 1.28%. Ralat ini kemungkinan terjadi karena adanya noise dari luar yang mempengaruhi plat kapasitor sehingga pembacaan frekuensi menjadi berubah atau terjadi gangguan tegangan noise atau ripple dari power supply sehingga mempengaruhi kinerja IC NE555 atau suhu cairan berubah (akibat suhu sekitar yang berubah juga) sehingga saat kalibrasi sensor untuk mode pembacaan level pada suhu 30 oC tidak cocok dengan suhu pada saat pengujian. Pembacaan sampel lainnya juga terjadi ralat yang tidak beda jauh dengan ralat sampel 1 sehingga didapatkan ralat rata- rata 1.01%. Rata-rata ralat sebesar 1.01% menunjukkan keakurasian sensor yang lumayan bagus. Berikut tampilan pembacaan ketinggian sensor yang ditampilkan ke LCD.
(1) (2)
Gambar 4.6.1 Gambar pengujian level dengan suhu konstan 30 oC pada ketinggian 15.60 cm (1) dan 13.70 cm (2)
Gambar 4.6.2 Gambar pengujian level dengan suhu konstan 30 oC 10.70 cm 2. Pengujian suhu
Berikut tabel hasil pengujian pembacaan suhu.
Tabel 4.9 Pengujian data pada ketinggian 10 cm
Termometer (oC) Alat Rancang (oC) Ralat (%)
49.30 49.40 0.20
48.60 48.71 0.22
44.80 44.83 0.06
Ralat rata-rata % 0.16
Hasil pengukuran mode ketinggian dapat dilihat pada tabel diatas. Pencarian ralat dalam persen didapat dari rumus seperti mode ketinggian (halaman 38).
Setelah mengatur nilai suhu pada cairan di wadah yaitu 49.30 oC untuk sampel 1, sensor pada mode pembacaan suhu membaca nilai sebesar 49.40 oC. Terjadi ralat sebesar 0.10 oC. Ralat ini kemungkinan terjadi seperti yang sudah dijelaskan di pengujian mode ketinggian. Pembacaan sampel lainnya juga terjadi ralat yang tidak beda jauh dengan ralat sampel 1 sehingga didapatkan ralat rata-rata 0.16%. Rata-rata ralat sebesar 0.16%. menunjukkan keakurasian sensor yang bagus. Berikut tampilan pembacaan ketinggian sensor yang ditampilkan ke LCD.
(1) (2)
Gambar 4.6.3 Gambar pengujian suhu dengan ketinggian 10 cm pada nilai 49.30 oC (1) dan 48.60 oC (2)
Gambar 4.6.4 Gambar pengujian suhu dengan ketinggian 10 cm pada nilai 44.80 oC 4.8 Tampak Fisik Sensor
Dibawah ini merupakan bentuk keseluruhan fisik sensor dan miniatur wadah air
“Rancang Bangun Sensor Kapasitif Ketinggian Dan Suhu Air Di Tangki Menggunakan Satu Transduser”.
Gambar 4.7 Gambar keseluruhan sistem
BAB 5 KESIMPULAN
5.1 Kesimpulan
Setelah melakukan tahap perancangan dan perancangan sistem yang kemudian dilanjutkan dan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut:
1. Telah berhasil dirancang sebuah prototipe sensor kapasitif ketinggian dan suhu air di tangki menggunakan satu transduser berbasis mikrokontroler ATmega328.
Berdasarkan pengujian yang telah dilakukan, alat ini dapat membaca perubahan nilai kapasitansi terhadap perubahan ketinggian dan suhu. Dimana nilai kapasitansi ini diolah oleh ATmega 328 mengguanakan persamaan regresi linear menjadi nilai ketinggian dan suhu secara bergantian. Ralat rata-rata pembacaan ketinggian sebesar 1.01% dan suhu sebesar 0.16%, dimana ralat tersebut memperlihat keakurasian sensor yang bagus.
5.2 Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut agar persen kesalahan alat ini lebih kecil, yaitu:
1. Membuat konstruksi kapasitif berbentuk tabung serta dilapisi dengan pelindung yang lebih tahan panas agar tidak ada gangguan noise.
2. Pembuatan lapisan antara plat kapasitor dibuat lebih tebal dan tahan panas agar tidak merubah nilai resistansi internal konduktor dari sensor kapasitif.
3. Modul dan sensor sebaiknya dipisahkan dari peralatan elektronik lainnya agar tidak ada gangguan noise.
4. Tahap akhir bisa diterapkan algortima deep learning agar pembacaan dapat dilakukan secara simultan.