1 1.1 Latar Belakang
Saat ini, tenaga listrik dapat diperoleh dari jaringan listrik PLN. Sumber tenaga pembangkit listrik terdiri dari beberapa macam salah satunya yaitu tenaga angin. Saat ini, pembangkit listrik yang ada di Indonesia sebagian besar menggunakan tenaga air (PLTA). Air dapat saja menjadi sumber daya alam yang kritis, karena penggunaan dan menajemen yang buruk. Kelemahan lain dari listrik tenaga air yaitu dibutuhkan sumber dana yang besar dan juga area lahan yang luas. Sumber energi fosil yang selama ini digunakan diperkirakan akan habis, karena eksploitasi besar-besaran untuk mengimbangi keperluan akan energi untuk kebutuhan.
Untuk itu perlu dikembangkan sumber energi listrik yang bisa diperbaharui diantaranya tenaga angin dan tenaga gas bumi. Selama ini pembangkit listrik dengan tenaga angin masih mengandalkan baling-baling untuk konversi angin menjadi putaran generator. Keuntungan utama dari penggunaan pembangkit listrik tenaga angin adalah disebabkan sumber energi ini yang terbarukan. Hal ini berarti pemanfaatan sumber energi ini tidak akan berkurang, sedangkan penggunaan bahan bakar atau sumber energi dari fosil dengan bertambahnya waktu akan habis. Dengan alasan itu dimasa depan tenaga angin bisa menjadi sumber energi yang bisa diandalkan. Keuntungan lain menggunakan sumber energi dengan tenaga angin merupakan sumber energi yang ramah lingkungan, dimana penggunaannya tidak mengakibatkan emisi gas buang atau polusi yang bisa merusak lingkungan.
Dengan teknologi ini penulis mencoba mengimplementasikan secara keseluruhan pembangkit listrik tenaga angin dengan teknologi Windbelt. Komponen pendukung pada pembangkit listrik diantaranya sensor rotary encoder yang digunakan untuk pendeteksi kecepatan angin pada sistem. Pull-up resistor digunakan untuk menghitung jumlah getaran yang dihasilkan oleh membran/pita ketika tertiup oleh angin. Mikrokontroler digunakan untuk mengolah data-data masukan dari sensor rotary encoder, pull-up resistor, data keluaran arus dan tegangan dari sistem pembangkit ini ditampilkan pada LCD.
1.2 Rumusan Masalah
Dari latar belakang masalah di atas, pokok permasalahan yang akan dibahas adalah :
1. Bagaimana implementasi dari teknologi Windbelt.
2. Bagaimana keluaran dari sistem Windbelt dapat menyalakan beban lampu led.
3. Berapa jumlah membran/pita yang dibutuhkan untuk menyalakan beban lampu led.
1.3 Maksud dan Tujuan
Maksud dari tugas akhir ini adalah merancang suatu sistem yang dapat mengubah energi gerak (tenaga angin) menjadi energi listrik, dan tujuan dari tugas akhir ini adalah meneliti apakah sistem dapat bekerja dengan kecepatan angin minimal 2 m/s.
1.4 Batasan Masalah
Dari rumusan masalah yang timbul, pada perancangan alat dibuat beberapa batasan masalah, diantaranya :
1. Beban yang akan digunakan adalah lampu led. 2. Panjang membran / pita 90 cm.
1.5 Metodologi Penelitian
Metode penelitian yang penulis gunakan dalam pengerjaan tugas akhir ini adalah sebagai berikut :
1. Studi analisis
Metode ini digunakan untuk mendapatkan informasi dan pengetahuan dari literatur-literatur yang sudah ada, baik dari buku, jurnal dan internet. 2. Observasi
Metode ini digunakan untuk melakukan observasi terhadap komponen-komponen yang akan digunakan dengan berbekal informasi dan pengetahuan yang sudah didapatkan dari studi literatur.
3. Perancangan Model Sistem
Metode ini dilakukan untuk menerapkan informasi yang sudah didapatkan dari studi literatur dan pengalaman dalam observasi kedalam model sistem yang akan dirancang.
4. Uji coba dan evaluasi sistem
1.6 Sistematika Penulisan
Dalam laporan tugas akhir ini berisi lima bab diantaranya adalah : 1. BAB 1 PENDAHULUAN
Bab ini adalah pendahuluan yang berisi latar belakang, rumusan masalah, batasan masalah, metode penelitian, serta sistematika penulisan.
2. BAB 2 TEORI PENUNJANG
Bab ini adalah teori penunjang yang berisi teori dasar yang menjelaskan hal-hal yang berhubungan dengan tugas akhir.
3. BAB 3 PERANCANGAN SISTEM
Bab ini adalah perancangan sistem yang berisi blok-blok sistem yang dirancang maupun disimulasikan beserta penjelasan mengenai blok-blok sistem yang dibuat tersebut.
4. BAB 4 PENGUJIAN DAN ANALISA SISTEM
Bab ini adalah pengujian dan analisa yang berisi hasil keluaran pengujian dari sistem yang telah dibuat, seperti hasil yang didapat sesuai atau tidak. Berhasil atau tidaknya akan disertai analisa mengapa sistem tersebut dapat bekerja atau tidak.
5. BAB 5 KESIMPULAN DAN SARAN
5
Pada bab ini akan dibahas mengenai teori dan komponen penunjang yang
akan digunakan dalam perancangan “ Implementasi Pembangkit Listrik Tenaga
Angin dengan Teknologi Windbelt Berbasis Mikrokontroler”.
2.1 Listrik
Listrik adalah daya atau kekuatan yang ditimbulkan oleh adanya pergesekan atau melalui proses kimia, dapat digunakan untuk menghasilkan panas atau cahaya atau untuk menjalankan mesin. Menurut ilmu fisika, listrik merupakan suatu gejala yang diakibatkan oleh adanya atau gerak dari muatan-muatan (elektron-elektron atau ion-ion) yang menimbulkan gaya listrik. Dengan kata lain, listrik adalah aliran elektron-elektron dari atom ke atom pada sebuah penghantar. Atau menurut pengertian lainnya, listrik adalah sumber energi yang disalurkan melalui kabel. Listrik memungkinkan terjadinya banyak fenomena fisika yang dikenal luas, seperti petir, medan listrik, dan arus listrik. Listrik biasa digunakan di dalam segala aspek kehidupan. Listrik dibedakan menjadi dua yaitu listrik statis dan listrik dinamis :
1. Listrik statis
Listrik statis adalah listrik yang tidak mengalir dan perpindahan arusnya terbatas.Listrik statis mempelajari sifat – sifat muatan listrik.Pada listrik statis, aliran perpindahan elektron terjadi karena digosokan atau di gesekan.Parameter untuk mengukur listrik statis cukup sulit, karena tidak mudah mengukur arus, tegangan, daya, dan hambatan misalnya pada penggaris plastik yang menarik sobekan-sobekan kertas.
2. Listrik dinamis
Pada listrik dinamis, tejadi perpindahan elektron secara berlanjut yang dihantarkan oleh bahan konduktor. Parameter untuk mengukur listrik dinamis yaitu dengan alat ukur baku.
2.2 Gaya Gerak Listrik
Gaya gerak listrik merupakan beda potensial yang terukur antara kutub-kutub sel (misalnya batu baterai) yang terukur ketika sumber tidak mengalirkan listrik. Gaya Gerak Listrik biasa disingkat dengan GGL, diberi lambang E dengan satuan volt (J/C). Nilai GGL juga menunjukkan kemampuan sebuah sumber untuk memindahkan 1 C muatan dari kutub satu ke kutub lainnya. Gaya Gerak Listrik merupakan nilai beda potensial yang terukur ketika sumber belum mengalirkan listrik atau saklar belum dihubungkan. Beda potensial yang terukur ketika sumber sudah mengalirkan arus listrik (saklar sudah terhubung) disebut tegangan jepit.
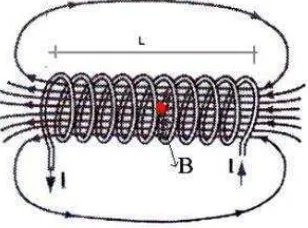
Gaya gerak listrik induksi adalah timbulnya gaya gerak listrik di dalam kumparan yang mencakup sejumlah fluks garis gaya medan magnetik, bilamana banyaknya fluks garis gaya itu divariasi. Dengan kata lain, akan timbul gaya gerak listrik di dalam kumparan apabila kumparan itu berada di dalam medan magnetik yang kuat medannya berubah-ubah terhadap waktu.
Gambar 2.1 Arah arus induksi
Besarnya gaya gerak listrik induksi dapat dihitung dengan rumus :
Keterangan :
E = Besarnya GGL Induksi (Volt)
= Perubahan Fluks Magnet (Weber) B = Induksi Magnet (Tesla)
A = Luas daerah (m2)
= Lamanya waktu (s)
Sedangkan untuk mencari fluks magnet dapat dihitung dengan rumus :
……….… (2.2)
maka :
……….,…… (2.3) Keterangan :
= Fluks Magnet (Weber / Tesla.meter2) B = Induksi Magnet (Tesla)
A = Luas daerah (m2)
= Sudut antara B dan garis normal
Kumparan yang digunakan berbentuk solenoida, maka rumus yang digunakan untuk mencari induksi magnetik yaitu sebagai berikut :
Jika induksi magnetik berada di tengah-tengah solenoida
Gambar 2.2 Induksi magnetik pada tengah-tengah solenoida
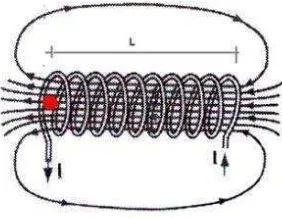
Jika induksi magnetik berada di salah satu ujung solenoida
Gambar 2.3 Induksi magnetik pada salah satu ujung solenioda
……… (2.5)
Keterangan :
B : Induksi Magnet (Tesla)
: Permeabilitas ruang hampa ( x 10-7 Wb/A.m ) : Arus pada solenoida (A)
: Panjang solenoida (m) : Banyaknya lilitan
2.3 Perangkat Keras
2.3.1 Windbelt
Windbelt adalah suatu perangkat untuk mengubah tenaga angin menjadi listrik. Windbelt memanfaatkan gerakan membran atau pita yang dihasilkan oleh efek getaran aeroelastik untuk menggerakkan magnet menjauhi dan mendekati kumparan sehingga menginduksi arus dalam kawat yang membentuk kumparan[3].
Dari gambar di atas, ketika ada angin yang berhembus ke arah pita, maka pita tersebut akan bergetar. Dari getaran pita tersebut magnet pun akan ikut bergerak mendekati menjauhi kumparan. Ketika magnet bergerak mendekati menjauhi kumparan, maka akan menimbulkan arus induksi di dalam kumparan dimana ketika ada penghantar di ujung kumparan akan menghasilkan arus, arus yang dihasilkan adalah arus searah atau Direct Current (DC).
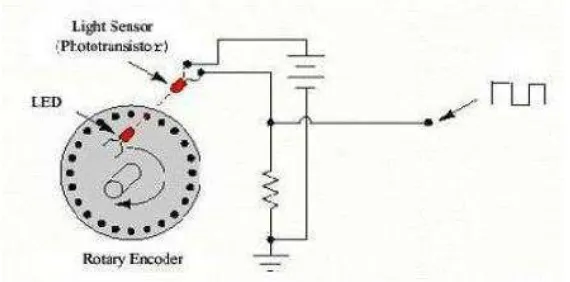
2.3.2 Sensor Rotary Encoder
Rotary encoder adalah alat elektromekanik yang dapat memonitor gerakan dan posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder untuk diteruskan ke rangkaian kendali.
Gambar 2.5 Prinsip Kerja Rotary Encoder
Prinsip kerja dari sensor ini adalah saat rangkaian sumber cahaya diberi VCC 5 Volt dan menghasilkan cahaya, cahaya masuk pada phototransistor tidak terhalangi maka akan menghasilkan tegangan 5V dan begitu juga sebaliknya saat terhalangi maka akan menghasilkan tegangan 0V[4].
Berikut merupakan rumus yang digunakan untuk mencari kecepatan angin[5] :
……… (2.7)
Keterangan :
RPM (Rotation Per Minute) : Banyak putaran per menit Banyak celah : Banyaknya celah dalam piringan
r : jari-jari piringan (m)
Kecepatan Angin : Kecepatan angin yang dideteksi (m/s)
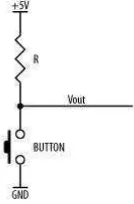
2.3.3 Deteksi Getaran
Teknik rangkaian pull-up resistor digunakan untuk menghitung jumlah getaran yang terjadi pada saat pita tertiup oleh angin. Pull-up resistor adalah rangkaian resistor dimana resistor ditempatkan diantara sumber tegangan dan input sinyal. Jika saklar berada pada kondisi terbuka maka Vout akan
menghasilkan logika “HIGH” karena tidak ada arus yang mengalir ke resistor, sedangkan jika saklar berada pada kondisi tertutup maka Vout akan menghasilkan
logika “LOW” karena ada arus yang mengalir ke resistor menuju ground.
Gambar 2.6 Rangkaian Pull-Up resistor
2.3.4 Pengukur Tegangan Output
Gambar 2.7 Rangkaian Pembagi Tegangan
Pada contoh rangkaian di atas, tegangan input Vin dibagi menjadi dua buah tegangan yaitu tegangan V1 dan tegangan V2. Berdasarkan hukum ohm dapat diketahui bahwa :
………. (2.8)
………. (2.9)
………..………. (2.10)
Dari ketiga rumus diatas dapat diperoleh rumus mencari V2 tanpa menghitung kuat arus lebih dulu menjadi :
………. (2.11)
………. (2.12)
Tegangan V2 dapat dicari dengan cara yang sama, yaitu :
………. (2.13)
2.3.5 LCD 16x2
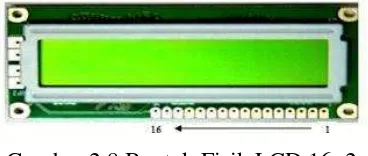
Layar LCD merupakan suatu media penampilan data yang sangat efektif dan efisien dalam penggunaannya. Untuk menampilkan sebuah karakter pada layar LCD diperlukan beberapa rangakaian tambahan. Adapun bentuk fisik LCD 16x2 seperti pada dibawah ini.
Gambar 2.8 Bentuk Fisik LCD 16x2
Modul LCD berukuran 16 karakter x 2 baris dengan fasilitas backlighting memiliki 16 pin yang terdiri dari 8 jalur data, 3 jalur kontrol dan jalur-jalur catu daya, dengan fasilitas pin yang tersedia maka lcd 16 x 2 dapat digunakan secara maksimal untuk menampilkan data yang dikeluarkan oleh mikrokontroler.
Tabel 2.1. Tabel Konfigurasi Pin LCD 16x2
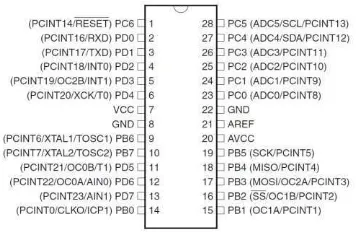
2.3.6 ATMega328P-PU
Atmega328P-PU adalah sebuah single chip mikrokontroler yang dibuat oleh Atmel dan termasuk dalam seri megaAVR. Mikrokontroler berbasis Atmel 8-bit AVR berarsitektur RISC digabungkan 32 KB ISP Flash memory dengan kemampuan baca-tulis-sementara, 1 KB EEPROM, 2 KB SRAM, 23 general purpose I / O baris, 32 general purpose register, tiga timer / counter yang fleksibel dengan compare mode, internal dan eksternal interupsi, serial programmable USART, antarmuka 2-wire serial byte-oriented, SPI port serial, 6-channel 10-bit A / D converter (8-saluran dalam paket TQFP dan QFN / MLF) , programmable watchdog timer dengan internal osilator, dan pilihan lima software mode penghematan daya. Perangkat membutuhkan supply tegangan antara 1,8 - 5,5 volt. Perangkat mencapai throughput mendekati 1 MIPS per MHz.
Gambar 2.9 Konfigurasi Pin ATMega328P-PU Berikut merupakan fungsi dari pin-pin Atmega328P-PU :
1. VCC : Tegangan supply 2. GND : Ground
3. Port B (PB7-0) : merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output.
4. Port C (PC5-0) : merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital dengan internal pull-up resistor.
5. PC6 : digunakan sebagai reset input jika RSTDISBL Fuse tidak diprogram, jika RSTDISBL Fuse diprogram maka digunakan sebagai pin input/output. 6. Port D (PD7-0) : merupakan jalur data 8 bit yang masing-masing pin-nya
juga dapat difungsikan sebagai input/output.
digunakan. Jika ADC digunakan, harus disambungkan ke Vcc melalui sebuah low-pass filter. PC6-4 menggunakan tegangan supply digital. 8. AREF : merupakan tegangan analog reference untuk konverter A/D. 9. ADC7-6 (Hanya paket TQFP dan QFN/MLF) : dalam paket TQFP dan
QFN/MLF, ADC7-6 melayani sebagai analog input untuk konverter A/D. pin-pin ini diberi tegangan dari analog supply dan melayani 10-bit kanal ADC.
2.4 Perangkat Lunak
Perangkat yang digunakan yaitu Arduino IDE ( Integrated Development Environment) merupakan aplikasi cross-platform yang ditulis pada bahasa Java, dan berasal dari kata IDE untuk bahasa pengolahan pemrograman dan proyek Wiring, dirancang untuk memperkenalkan pemrograman untuk pembuat program dan pendatang baru lainnya agar terbiasa dengan pengembangan perangkat lunak. Perangkat lunak ini termasuk editor kode dengan fitur seperti syntax highlighting, brace matching, dan indentation automatic dan juga mampu meng-compile dan meng-upload program ke board dengan satu klik. Sebuah program atau kode yang ditulis untuk Arduino disebut "Sketch".
IDE Arduino terdiri dari:
- Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
- Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh mikrokontroler adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
Perangkat lunak ini mendukung bahasa C / C++. Pengguna hanya perlu mendefinisikan dua fungsi untuk membuat program agar dapat dieksekusi yaitu :
- Setup () : fungsi yang berisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkan
16 BAB III
PERANCANGAN SISTEM
3.1 Diagram Blok Sistem Windbelt
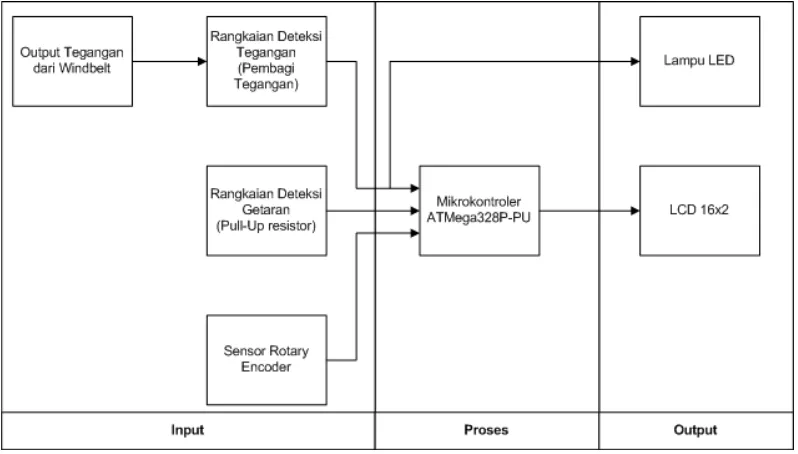
Pada bab ini akan dijelaskan mengenai komponen-komponen apa saja yang digunakan dalam pembuatan Windbelt, baik dari segi perancangan alat, perangkat keras, maupun perangkat lunak. Secara garis besar perancangan sistem dapat dilihat pada diagram blok pada gambar 3.1 dibawah ini.
Gambar 3.1 Diagram Blok Sistem
Dari gambar 3.1 diatas dapat dijelaskan bahwa prinsip kerja sistem pembangkit listrik Windbelt ini yaitu :
1. Output tegangan & arus dari Windbelt akan masuk terlebih dahulu ke sensor deteksi tegangan dan arus sebelum masuk ke ADC mikrokontroler 2. Deteksi getaran (pull-up resistor) digunakan untuk menghitung jumlah
getaran yang terjadi ketika membran / pita Windbelt tertiup oleh angin. 3. Untuk mengukur kecepatan angin yang datang digunakan sensor rotary
4. Mikrokontroler ATMega328P-PU digunakan untuk mengolah data masukan dari rotary encoder, pull-up resistor dan output tegangan Windbelt.
5. LCD 16x2 digunakan untuk menampilkan keluaran dari mikrokontroler, informasi yang ditampilkan berupa besar tegangan Windbelt, jumlah getaran dari membran / pita dan kecepatan angin yang datang.
6. Lampu LED sebagai indikator apakah Windbelt dapat menyalakan beban.
3.2 Perancangan Perangkat Keras
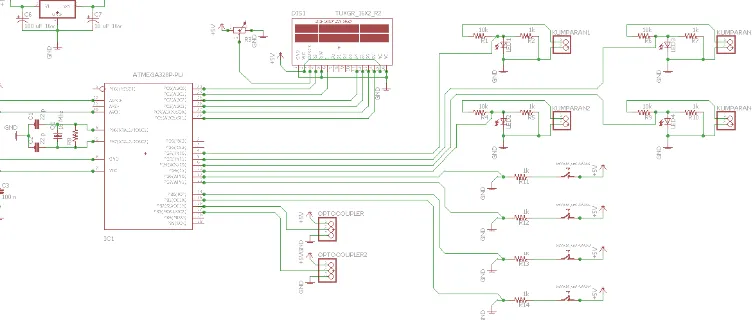
3.2.1 Rangkaian Sistem Windbelt
Rangkaian ini adalah rangkaian yang digunakan dalam sistem Windbelt. Dibantu dengan mikrokontroler ATMega328P-PU sebagai pengolah data, berikut ini merupakan rangkaian keseluruhan dari sistem Windbelt.
Gambar 3.2 Rangkaian Sistem Windbelt
3.2.2 Rangkaian Pengukur Tegangan Output Windbelt
Rangkaian ini digunakan untuk mendeteksi tegangan yang keluar dari Windbelt.
Gambar 3.3 Rangkaian Deteksi Tegangan Output Windbelt
Untuk mendapatkan tegangan digunakan rangkaian pembagi tegangan, cara kerja dari rangkaian ini yaitu ketika tegangan yang dihasilkan dari kumparan dibagi terlebih dahulu dengan menggunakan dua buah resistor. Vout dihasilkan dengan cara mengukur tegangan antara dua buah resistor tersebut menggunakan persamaan 2.12. Keluaran dari rangkaian ini menjadi masukan bagi ADC mikrokontroler.
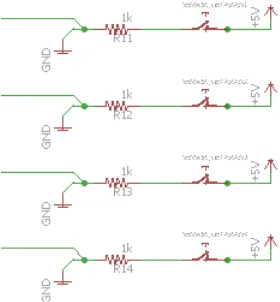
3.2.3 Rangkaian Deteksi Getaran
Rangkaian ini berfungsi untuk mengetahui jumlah getaran yang dihasilkan oleh pita Windbelt ketika tertiup oleh angin.
Rangkaian yang digunakan adalah pada gambar 3.4 diatas adalah rangkaian pull-up resistor, ketika mekanik saklar yang terdapat pada pita tertutup,
Vout akan menghasilkan logika “Low”. Keluaran yang dihasilkan akan menjadi masukan bagi ADC mikrokontroler.
3.2.4 Rangkaian Sensor Rotary Encoder
Rangkaian ini digunakan untuk mengetahui kecepatan angin yang datang. Keluaran yang dihasilkan akan menjadi masukan bagi ADC mikrokontroler.
Gambar 3.5 Rangkaian Sensor Rotary Encoder
Cara kerja rangkaian ini yaitu saat rangkaian sumber cahaya diberi VCC 5 Volt dan menghasilkan cahaya, ketika cahaya masuk pada phototransistor tidak terhalang maka akan menghasilkan tegangan 5V dan begitu juga sebaliknya saat terhalang maka akan menghasilkan tegangan 0V. Jari-jari piringan yang digunakan adalah 3.25 cm. Jumlah celah yang digunakan dalam sistem ini ada 19 buah. Untuk menghitung kecepatan angin yang datang dapat digunakan persamaan 2.7.
3.2.5 Rangkaian LCD 16x2
Gambar 3.6 Rangkaian LCD 16x2
3.2.6 Desain Windbelt
Desain Windbelt ini dibuat dengan kerangka kayu agar lebih kokoh dan mudah ditempatkan dimana saja. Berikut merupakan desain Windbelt yang akan dirancang :
Spesifikasi :
Diameter lilitan 0,10 mm
Panjang penampang kumparan 18 mm - Magnet : Magnetium
- Piringan Optocoupler :
Jari-jari 3.25 cm
Perancangan Perangkat Lunak ini merupakan hal yang paling penting dalam perancangan sistem Windbelt. Pada bagian perancangan ini yang nantinya akan dijadikan sebagai algoritma kendali dari keseluruhan sistem kerja Windbelt. Algoritma tersebut dituliskan pada sebuah Arduino IDE 1.6.5 dengan bahasa C/C++ kemudian disimpan pada sebuah IC Arduino UNO, maka secara otomatis Arduino UNO akan mengerjakan seluruh program.
3.3.1 Algoritma Dasar
Gambar 3.8 Diagram Alir Algoritma Sistem
Berikut merupakan penjelasan dari diagram alir diatas : 1. Mikrokontroler dinyalakan, mulai program.
2. Inisialisasi pin mikrokontroler yang digunakan, inisialisasi variabel dan tipe data yang digunakan.
3. Program membaca data yang akan diolah yaitu tegangan yang dihasilkan kumparan, jumlah getaran yang didapatkan oleh sensor getaran, dan kecepatan angin yang didapatkan oleh sensor rotary encoder (optocoupler).
4. Tunggu sampai 1 menit, jika waktu belum satu menit terus baca data. 5. Jika waktu sama dengan 1 menit, tampilkan data yang telah didapatkan
3.3.2 Desain Tampilan pada LCD
Desain menu pada LCD 16x2 merupakan pembuatan program antarmuka
(interface) yang diprogram dengan menggunakan bahasa C/C++. Perancangan desain
menu pada LCD digunakan untuk menyampaikan informasi yang dibutuhkan oleh pengguna. Berikut merupakan rancangan tampilan untuk LCD :
Gambar 3.9 Desain Tampilan pada LCD Keterangan :
(a) Tampilan awal
(b) Tampilan untuk menunggu 1 menit
(c) Tampilan Tegangan per kumparan
(d) Tampilan Tegangan Total
(e) Tampilan Optocoupler
(f) Tampilan Jumlah getaran pita
24 BAB IV
PENGUJIAN DAN ANALISA SISTEM
Pada bab ini akan dibahas mengenai percobaan dan hasil dari pengujian pada alat serta analisa hasil pengujian sistem Windbelt. Pengujian dilakukan untuk mengetahui apakah sistem dapat berjalan sebagaimana mestinya. Uji coba yang dilakukan yaitu dengan menggunakan angin alam. Pengujian dilakukan dengan mengikuti urutan algoritma sesuai dengan flowchart pada gambar 3.8.
4.1 Pengujian Alat
4.1.1 Pengujian Tampilan LCD 16x2
Pengujian pada tampilan LCD 16x2 sebagaimana yang telah didesain pada gambar 3.9, berikut merupakan hasil tampilan yang telah diuji :
Gambar 4.1 Tampilan Awal
Untuk tampilan awal pada LCD dapat dilihat pada gambar 4.1 di atas, dimana pada saat alat dinyalakan maka tampilan awal yang akan keluar seperti di atas dan akan diteruskan dengan tampilan pada gambar 4.2.
Pada gambar 4.2 merupakan tampilan setelah alat pertama kali dinyalakan, dimana pada saat tampilan ini mikrokontroler sedang mengambil data sampai dengan waktu 60 detik. Setelah waktu habis, maka tampilan berikutnya seperti pada gambar 4.3 berikut.
Gambar 4.3 Tampilan Tegangan Keluaran Tiap Kumparan
Gambar 4.3 merupakan tampilan hasil tegangan keluaran yang telah dihitung selama 60 detik. Data yang ditampilkan adalah data yang dihasilkan selama selang waktu tersebut.
Gambar 4.4 Tampilan Tegangan Keluaran Total
Tampilan pada gambar 4.4 di atas merupakan tampilan hasil tegangan keluaran total dari seluruh kumparan.
Gambar 4.5 di atas merupakan tampilan hasil perhitungan kecepatan angin yang diperoleh setelah pengambilan data. Data yang ditampilkan adalah data yang dihasilkan selama selang waktu 1 menit tersebut.
Gambar 4.6 Tampilan Jumlah Getaran Tiap Pita
Pada gambar 4.6 diatas merupakan tampilan tampilan jumlah getaran yang terjadi dan terhitung pada masing-masing pita windbelt. Data yang ditampilkan adalah data yang dihasilkan selama selang waktu 1 menit tersebut. Dari perancangan tampilan yang telah didesain pada gambar 3.9, tampilan pada LCD 16x2 sudah sesuai dengan perancangan yang telah ditentukan.
4.2 Hasil Pengujian dan Analisa
Pengujian alat yang dilakukan berlokasi di daerah Antapani, waktu pengujian sekitar pukul 15.30 WIB – 17.00 WIB. Berikut merupakan tabel hasil keluaran kecepatan angin, jumlah getaran, tegangan pada percobaan yang telah dilakukan penulis.
Tabel 4.1. Tabel Hasil Pengujian Alat
Opto 1 Opto 2 Anemo
meter Getaran Vout (V) Getaran Vout (V) Getaran Vout (V) Getaran Vout (V)
Dari tabel di atas dapat terlihat hasil pengujian yang telah dilakukan oleh penulis. Data pengujian diambil dari lima kali percobaan terbaik, dapat terlihat hasil dari kecepatan angin, tegangan keluaran dan jumlah getaran yang didapatkan. Untuk mempermudah analisa, berikut adalah grafik-grafik dari hasil pengujian yang telah dilakukan penulis.
Gambar 4.7 Grafik Hasil Uji Tegangan Vout
Dari pengujian alat yang telah dilakukan, penulis memperoleh hasil seperti pada grafik pengujian di atas. Tegangan keluaran yang didapatkan pada saat percobaan yaitu 0.11 V untuk tegangan paling rendah dan 1.23 V untuk tegangan paling tinggi.
Nilai dari R1 adalah sebesar 10KΩ dan R2 sebesar 1KΩ. Dari data pada
tabel 4.1 nilai Vout telah diketahui, sehingga untuk mencari Vin dan I dapat
digunakan persamaan 2.12 dan persamaan 2.10. Berikut merupakan perhitungan untuk Vin dan I pada rangkaian :
Percobaan 1 : Dik: R1 = 10KΩ
R2=1KΩ
Vout = 0.75 V
1 2 3 4 5
Pita1 0.75 0.11 0.64 0.32 0.64
Pita2 0.91 0.27 0.38 0.75 0.43
Pita3 1.29 0.21 0.86 0.81 0.21
Pita4 0.16 0.11 0.11 0.11 0.59
Dik: R1 = 10KΩ
R2=1KΩ
Vout = 0.91 V
Dik: R1 = 10KΩ
R2=1KΩ
Vout = 1.29 V
Dik: R1 = 10KΩ
R2=1KΩ
Vout = 0.16 V
Ketika magnet bergerak mendekat dan menjauhi kumparan, maka akan menimbulkan induksi magnetik pada kumparan. Induksi magnetik pada kumparan dapat dihitung dengan menggunakan persamaan 2.5. Berikut merupakan perhitungan induksi magnetik yang terjadi pada kumparan :
Percobaan 1
I=0.075 mA; N=5000; L=18 mm
I=0.092 mA; N=5000; L=18 mm
I=0.13 mA; N=5000; L=18 mm
I=0.016 mA; N=5000; L=18 mm
Tabel 4.2 Tabel Hasil Perhitungan Tegangan input (Vin), arus (I) 1.43 V dan tegangan Vin yang paling rendah adalah 0.12 V. Sementara arus yang didapatkan menurut perhitungan diatas yakni 0.13 mA paling tinggi dan paling rendah yaitu 0.011 mA. Untuk besarnya induksi magnetik yang terjadi nilai tertinggi yaitu tesla dan yang paling rendah adalah
Gambar 4.8 Grafik Hasil Uji Jumlah Getaran
Dari grafik di atas dapat terlihat jumlah getaran paling sedikit yaitu 226 getaran, sementara getaran paling banyak yaitu 730 getaran. Getaran paling sedikit terjadi pada percobaan ke-2, dan getaran paling banyak terjadi pada percobaan ke-1.
Gambar 4.9 Grafik Perbandingan Tegangan Vout dengan Jumlah Getaran
Dari gambar 4.9 di atas, dapat terlihat korelasi antara jumlah getaran yang dihasilkan oleh pita dengan tegangan Vout ketika tertiup oleh angin. Tegangan keluaran (Vout) yang didapatkan pada percobaan paling tinggi yaitu 1.29 V dan
1 2 3 4 5
Pita1 286 230 428 317 388
Pita2 710 362 357 468 368
Pita3 730 341 594 472 326
Pita4 622 226 180 230 378
paling rendah yaitu 0.11 V. Tegangan paling tinggi terjadi pada percobaan ke-1 dengan pita 3, sementara tegangan paling rendah terjadi pada percobaan ke-2 dengan pita 1 dan 4 serta pada percobaan ke-3 dan ke-4 dengan pita 4. Tegangan keluaran ini sangat bergantung pada keberadaan angin yang ada, semakin tinggi kecepatan angin maka semakin besar pula tegangan keluaran yang akan dihasilkan.
Jumlah getaran yang didapatkan pada percobaan ketika pita tertiup angin menunjukan bahwa sensor getar bekerja dengan cukup baik. Rangkaian pull-up resistor dapat mendeteksi dengan baik berapa saja jumlah getaran yang terjadi ketika tertiup angin pada seluruh pita. Pada percobaan lain terdapat hasil dimana terdapat getaran namun tegangan keluaran (Vout) yang dihasilkan adalah 0 V. Ini dikarenakan angin dapat menggerakkan pita namun tidak sampai menghasilkan tegangan. Penempatan jarak saklar pull-up dengan pita sangat mempengaruhi tingkat sensitivitas dari sensor getaran.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Setelah melakukan penelitian dan pengujian pada alat yang dibuat untuk tugas akhir ini, maka dapat diambil beberapa kesimpulan dari hasil pengujian dan penelitan tersebut, diantaranya sebagai berikut :
1. Tegangan yang tercatat saat pengujian adalah 1.29 V untuk tegangan maksimum. Jumlah getaran untuk menghasilkan tegangan maksimum yang tercatat yaitu 730. Arus maksimum yang mengalir pada rangkaian adalah sebesar 0.13 mA. Semakin besar kecepatan angin maka akan semakin besar pula jumlah getaran, tegangan yang dihasilkan serta arus yang mengalir.
2. Beban lampu led dapat menyala.
3. Hasil penelitian sangat dipengaruhi oleh ketegangan pemasangan pita, jarak antara pita dengan magnet dan kumparan, pemasangan mekanik sensor getaran, kecepatan dan keberadaan angin yang berhembus.
5.2 Saran
Alat yang dibuat dalam tugas akhir ini masih terdapat kekurangannya, untuk itu penulis memberikan saran bagi yang akan mengembangkan tugas akhir ini. Adapun saran dari penulis adalah sebagai berikut :
1. Akan lebih memudahkan peneliti jika terdapat mekanik yang mengatur ketegangan pita dan jarak antara magnet dengan kumparan.
2. Magnet yang digunakan seharusnya magnet batang, agar menghasilkan induksi arus yang lebih maksimal.
MIKROKONTROLER
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
Oleh
Ahmad Burhan Arifin
NIM : 10209072
Pembimbing
Ayub Subandi, S.Si., M.T.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
v
1.3. Maksud dan Tujuan ... 2
1.4. Batasan masalah ... 2
1.5. Metodologi Penelitian ... 3
1.6. Sistematika Penulisan 4 BAB II. TEORI PENUNJANG ... 5
2.1. Listrik ... 5
2.2. Gaya Gerak Listrik ... 6
2.3. Perangkat Keras ... 8
2.3.1. Windbelt ... 8
2.3.2. Sensor Rotary Encoder ... 9
2.3.3. Deteksi Getaran ... 10
2.3.4. Pengukur Tegangan Output ... 10
2.3.5. LCD 16x2 ... 12
2.3.6. ATMega328P-PU ... 13
2.4. Perangkat Lunak... 14
BAB III. PERANCANGAN SISTEM ... 16
3.1. Diagram Blok Sistem Windbelt ... 16
vi
3.2.3. Rangkaian Deteksi Getaran 18
3.2.4. Rangkaian Sensor Rotary Encoder 19
3.2.5. Rangkaian LCD 16x2 19
3.2.6. Desain Windbelt 20
3.3. Perancangan Perangkat Lunak ... 21
3.3.1. Algoritma Dasar 21 3.3.2. Desain Tampilan pada LCD 23 BAB IV. PENGUJIAN DAN ANALISA SISTEM ... 24
4.1. Pengujian Alat ... 24
4.1.1 Pengujian Tampilan LCD 26x2 ... 24
4.1.2 Hasil Pengujian dan Analisa ... 26
BAB V. KESIMPULAN DAN SARAN ... 33
5.1. Kesimpulan ... 33
5.2. Saran ... 33
DAFTAR PUSTAKA ... 34
DAFTAR PUSTAKA
[1] Albert, P, Malvino. Prinsip-Prinsip Elektronika. Jilid 1, Jakarta : Salemba Teknika, 2003
[2] Shawn Frayne, Windbelt generator ‟Humdinger Wind Energy‟ Energy
harvesting and storage journal 17 July 2009.
http://www.humdingerwind.com.
[3] Anonymous. (2015). Windbelt - Wikipedia, the free encyclopedia. Diakses pada tanggal 27 Juli 2015 dari World Wide Web : https://en.wikipedia.org/wiki/Windbelt.
[4] Azlina, Maya. Pembuatan Alat Ukur Kecepatan Angin Dan Penunjuk Arah Angin Berbasis Mikrokontroller AT-MEGA 8535. Diakses pada tanggal 22
Juli 2015 dari World Wide Web :
http://jurnal.usu.ac.id/index.php/sfisika/article/download/5586/2352
iii
Segala puji bagi Allah SWT Yang Maha Pemurah , dengan segala akal dan pikiran yang diberikan-Nya alhamdulillah penulis dapat menyelesaikan penulisan skripsi yang berjudul “IMPLEMENTASI PEMBANGKIT LISTRIK TENAGA ANGIN DENGAN TEKNOLOGI WINDBELT BERBASIS
MIKROKONTROLER”.
Penulis menyadari dalam penulisan skripsi ini terdapat banyak sekali kekurangan dan keterbatasan. Namun penulis mencoba dengan segala kemampuan, ilmu dan waktu yang dimiliki agar penulisan skripsi ini terselesaikan tepat pada waktunya. Oleh karena itu kritik dan saran yang membangun penulis harapkan untuk dijadikan masukan di masa yang akan datang.
Dalam penulisan skripsi ini penulis banyak menerima bantuan dan dukungan dari berbagai pihak. Oleh karena itu penulis ingin mengucapkan terima kasih yang setulus-tulusnya kepada :
1. Ibunda Yanah yang telah mengandung penulis selama sembilan bulan. 2. Ibunda Yanah yang telah melahirkan penulis ke dunia.
3. Ibunda Yanah yang telah mendidik penulis sampai sekarang.
4. Ayahanda Achmad Faqih Azizi yang senantiasa bertanggung jawab kepada keluarga dan memberikan wejangan yang berarti bagi kehidupan penulis. 5. Kedua saudaraku Siti Maulida Puspita, S.Si (Kakak) dan Ahmad Wildan
Abdurrahman, S.Kom (Kakak) yang selalu memberikan semangat.
6. Bapak Prof. Dr. Ir. Denny Kurniadie, M.Sc sebagai Dekan Fakultas Teknik dan Ilmu Komputer.
7. Bapak Dr. Wendi Zarman, M.Si sebagai Ketua Jurusan Teknik Komputer. 8. Bapak Ayub Subandi, S.Si., MT. selaku Dosen Pembimbing dan Dosen
Wali.
9. Siti “Syifa” Fatonah yang senantiasa menemani dan menyemangati penulis. 10.Teman-teman TK-2 2009, terutama “Kapilem” yang selalu menyemangati
dan membantu penulis.
iv
13.Bidan Eny Juniyati, terima kasih buat Hypnotherapy-nya sukses terus buat klinik Umah Biyung.
Penulis berharap mudah-mudahan skripsi ini dapat bermanfaat dan menjadi keberkahan bagi semuanya. Amin.
Bandung, Februari 2016
Nama Lengkap : Ahmad Burhan Arifin Jenis Kelamin : Laki-laki
Tempat & Tanggal Lahir : Subang, 13 Mei 1992 Kewarganegaraan : Indonesia
Status : Belum Menikah
Golongan Darah : AB
Telepon : 08987828194, 085352208538
Alamat Rumah : Walahar Tegal Kalapa No.73 RT. 46 RW. 19 Kel. Dangdeur Kec. Subang Kab Subang 41212 Alamat Kost : Jl. Kubang Selatan II No.19A RT.01 RW.14
Kel. Lebak Gede Kec. Coblong Sekeloa 40132
E-mail : [email protected]
Riwayat Pendidikan
Lulus 1997-2003 2003-2006 2006-2009 2009-sekarang