BERBASIS MIKROKONTROLLER ATMEGA8535
SECARA SOFTWARE
TUGAS AKHIR
MUHAMMAD IQBAL
092408028
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERANCANGAN SISTEM PENGHITUNG VOLUME BAHAN
BAKAR SEPEDA MOTOR DENGAN OUTPUT ALARM DAN SUARA
BERBASIS MIKROKONTROLLER ATMEGA8535
SECARA SOFTWARE
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli
Madya
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PERANCANGAN SISTEM PENGHITUNG VOLUME
BAHAN BAKAR SEPEDA MOTOR DENGAN
ALARM DAN SUARA BERBASIS
MIKROKONTROLLER ATMEGA8535 SECARA
SOFTWARE
Kategori : TUGAS AKHIR
Nama : MUHAMMAD IQBAL
No Induk Mahasiswa : 092408028
Program Studi : DIPLOMA III (D3) FISIKA
Departement : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (MIPA) UNIVERSITAS SUMATERA
UTARA
Diluluskan di Medan, Juli 2012
Diketahui/Disetujui oleh
Program Studi D3 Fisika Pembimbing Ketua,
PERNYATAAN
PERANCANGAN SISTEM PENGHITUNGAN VOLUME BAHAN BAKAR SEPEDA MOTOR DENGAN DENGAN OUTPUT ALARM DAN SUARA
BERBASIS MIKROKONTROLER ATMEGA 8535
SECARA SOFTWARE
TUGAS AKHIR
Saya mengakui bahwa Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali
beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 19 Juli 2012
PENGHARGAAN
Puji dan syukur penulis panjatkan kehadirat Allah SWT, atas berkat Rahmat
dan karunia-NYA sehingga penulis dapat menyelesaikan Tugas Akhir ini tepat
pada waktunya.
Dalam menyelesaikan Tugas Akhir ini, penulis banyak mendapatkan
bantuan dan bimbingan dari berbagai pihak. Oleh karena itu pada kesempatan kali
ini penulis mengucapkan terima kasih kepada :
1. Bapak Dr.Sutarman,M.Sc,selaku Dekan Fakultas Matematika dan Ilmu
Pengetahuan Alam (MIPA) USU.
2. Ibu Dr.Susilawati,M.Si, selaku ketua Program studi D3 Fisika
Instrumentasi.
3. Bapak Drs.M. Firdaus, M.Si, selaku dosen pembimbing yang telah
banyak membimbing penulis sehingga laporan ini dapat diselesaikan
dengan baik.
4. Seluruh Dosen/Staf pengajar pada program studi D3 Fisika
Instrumentasi.
5. Kedua Orang tua saya yang sangat saya sayangi Ayahanda Basyaruddin
dan Ibunda Marwiyah, serta kepada kedua adik saya Rizki Fakhrurazi dan Khairul Abdillah yang telah memberikan dukungan moril dan
materil kepada penulis.
6. Seluruh rekan-rekan Fisika Instrumentasi D-III yang telah banyak
Aswan Afif, Mhd Ridho, Zulkarnain, Bangkit Kesuma Wardana, Faisal
Ari Fitra, Fuad Said Harahap dan Daftari serta teman –teman yang lain
yang tidak bisa penulis sebutkan satu persatu sehingga Tugas Akhir ini
bisa selesai dengan sukses, Ucapan Terima kasih special terutama untuk
bang Oki Handinata yang telah banyak membantu penulis.
Serta ucapan khusus terutama bagi orang – orang yang penulis kasihi yang
juga mendukung penulis baik langsung ataupun tidak langsung dalam bentuk moril
maupun materil serta do’a restu yang ditujukan kepada penulis, sehingga laporan ini
dapat diselesaikan.
Sepenuhnya penulis menyadari bahwa dalam menyelesaikan Tugas Akhir
ini, masih terdapat kekurangan. Untuk itu penulis mengharapkan saran dan kritik
yang bersifat membangun dari para pembaca, dimana saran dan kritik tersebut dapat
dimanfaatkan untuk kemajuan pengetahuan pada saat ini maupun di masa yang
akan datang.
Semoga laporan ini berguna bagi pembaca, akhir kata penulis mengucapkan
banyak terima kasih.
Penulis
ABSTRAK
DAFTAR ISI
1.2 Tujuan Penulisan... 3
1.3 Batasan Masalah ... 3
1.4 Metode Pengumpulan Data ... 4
1.5 Sistematika Penulisan ... 5
BAB II: LANDASAN TEORI 2.1 Mikrokontroler ATMEGA8535... 7
2.1.1 Konfigurasi PIN ATMEGA 8535 ... 11
2.1.2 Peta Memori ATMEGA8535 ... 13
2.1.3 Program memori ... 13
2.1.4 Data Memori ... 14
2.1.5 EEPROM Data Memori ... 15
2.1.6 Status Register ... 15
2.3.1 Pengolah Sinyal Suara ... 21
2.3.2 Ciri – Ciri ISD2560 ... 21
2.3.3 Deskripsi PIN ... 23
2.3.4 Mode Operasional ... 26
2.3.5 Mode Deskripsi Operasional... 27
2.4 LCD…… ... 28
2.5 Catu Daya…… ... 30
BAB III: RANCANGAN SISTEM 3.1 Diagram Blok & Cara Kerja Rangkaian Sistem ... 31
3.2 Perangkaian Rangkaian Catu Daya ... 32
3.3 Rangkaian Sensor Ultrasonic... 33
3.4 Perancangan Rangkaian Sensor Ultrasonic dengan Mikrokontroler AVR ATMEGA8535 ... 36
3.5 Perancangan Rangkaian LCD ... 38
3.6 Perancangan Rangkaian ISD2560 ... 40
BAB IV: PENGUJIAN RANGKAIAN 4.1 Pengujian & Analisa Rangkaian Sensor Ultrasonic... 41
4.2 Flow Chart ... 44
4.2.1 Pengujian Rangkaian Power Supply ... 45
4.2.2 Pengujian Rangkaian Mikrokontroller ATMEGA8535 ... 46
4.2.3 Pengujian Rangkaian LCD ... 47
4.3 Analisa Program ... 47
4.4 Program ... 49
BAB V: KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 61
Daftar Pustaka
DAFTAR GAMBAR
Gambar 2.1 Blok Diagram ATMEGA 8535 ... 10
Gambar 2.2 Konfigurasi PIN ATMEGA 8535 ... 12
Gambar 2.3 Peta Memori Program ... 14
Gambar 2.4 Peta Memori Data ... 14
Gambar 2.5 EPPROM Data Memori ... 15
Gambar 2.6 Status Register ... 15
Gambar 2.7 Sensor Ultrasonic ... 17
Gambar 2.8 Blok Sensor Ultrasonic Dengan Tampilan Seven Segment... 19
Gambar 2.9 Ilustrasi Cara Kerja Sensor ... 20
Gambar 2.10 Skematik Hub PIN ... 20
Gambar 2.11 Diagram Blok ISD2560 ... 22
Gambar 2.12 Konfigurasi PIN ISD 2560... 23
Gambar 2.13 LCD karakter 2x 16 ... 28
Gambar 2.14 Rangkaian Penurun Tegangan dan penghasil Tegangan DC ... 30
Gambar 3.1 Diagram Blok Rangkaian Penghitung ... 31
Gambar 3.2 Rangkaian Catu Daya ... 33
Gambar 3.3 Rangkaian Transmiter Ultrasonic... 34
Gambar 3.4 Rangkaian Receiver Ultrasonic ... 34
Gambar 3.5 Jarak antara TX-RX ... 35
Gambar 3.6 Keluaran Pulsa Ultrasonic ... 35
Gambar 3.7 Rangkaian Sensor Ultrasonic dgn Mikrokontroler AVR ATMEGA8535... 36
Gambar 3.8 Rangkaian LCD ... 38
Gambar 3.9 Rangkaian ISD2560... 40
DAFTAR TABEL
Tabel 2.1 Deskripsi PIN ISD2560 ... 24
Tabel 2.2 Mode Operasional ... 27
Tabel 4.1 Data jarak Deteksi Berbagai Halangan ... 41
Penulis
ABSTRAK
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi instrumentasi elektronika sekarang mengalami
perkembangan yang sangat pesat, memasyarakat dan bukan sesuatu hal yang asing
lagi. Manusia membutuhkan bantuan dari sesuatu yang dapat bekerja cepat, teliti,
dan tidak mengenal lelah. Sistem otomatisasi dapat menggantikan manusia untuk
mengerjakan sesuatu dalam lingkungan berbahaya bagi kesehatan dan keselamatan
atau daerah yang harus diamati dengan pengamatan lebih dari kemampuan panca
indera manusia. Kemajuan teknologi dalam bidang elektronika akan mampu
mengatasi masalah-masalah yang rumit sekalipun, dengan ketelitian dan kecepatan
serta ketepatan yang tinggi.
Dalam kehidupan masyarakat dikenal transportasi laut, darat dan udara.
Dalam hal ini penulis akan membahas transportasi darat yaitu sepeda motor sebagai
alat transportasi. Pada kesempatan ini penulis hanya membahas tentang program
yang digunakan pada sistem penghitung volume bahan bakar sepeda motor tetapi
berbasis pada program dari sistem penghitung tersebut.. Tidak jarang kita
mendengar ada seorang pengendara sepeda motor mengalami kehabisan bahan
bakar diperjalanan hanya karena pengukur meteran analog untuk mengetahui
volume bahan bakar pada sepeda motornya rusak ataupun tidak akurat. Berangkat
“ Perancangan Sistem Penghitung Volume Bahan Bakar Sepeda Motor Dengan Output Alarm Dan Suara Berbasis Mikrokontroler AT-Mega8535 Secara Software”.
Penghitung volume bahan bakar sepeda motor ini memanfaatkan ketinggian
suatu media materi cair berbasis mikrokontroler AT-MEGA8535 ini adalah sebuah
alat yang dibuat untuk memudahkan kita mengetahui volume bahan bakar
kendaraan sehingga pengendara dapat mengetahui jumlah bahan bakar pada tangki
kendaraannya tetapi pada tugas akhir ini penulis hanya membahas bagian
pemrograman saja, program itu berguna sebagai penghitung dan penaksiran jarak
tempuh dari volume bahan bakar.. Dengan demikian pengendara akan tahu apa
yang harus ia lakukan setelah mendengarkan hasil pengukuran yang dilakukan alat
ini, apakah pengendara harus mengisi ulang bahan bakar atau tidak. Selain itu alat
pengukur ini juga memiliki sebuah kelebihan yaitu dapat memprediksi jarak tempuh
sesuai kapasitas volume bahan bakar yang ada di tangki sebuah kendaraan. Sebagai
contoh jika alat pengukur ini menyebutkan volume bahan bakar,misal 0.5 liter maka
alat ini akan menghitung seberapa jauh lagi jarak yang dapat ditempuh kendaraan
dengan volume bahan bakar yang 0.5 liter tersebut.
Suatu alat ukur minimal terdiri dari sensor, pengolah data dan penampil.
Penampil digital akan memberi kemudahan dan kepastian nilai walaupun masih
dibutuhkan rangkaian analog untuk proses analog. Sebagai alat ukur tentu saja harus
dilakukan kalibrasi terhadap alat standar, agar data yang diperoleh dapat
1.2 Tujuan Penulisan
Tujuan dilakukan tugas akhir ini adalah sebagai berikut :
1. Salah satu syarat yang harus dipenuhi oleh mahasiswa dalam
menyelesaikan pendidikan pada program studi D-III Fisika FMIPA USU.
2. Menerapkan disiplin ilmu yang berkaitan yang telah diperoleh selama
perkuliahan.
3. Studi awal tentang penggunaan sensor ultrasonic yang berfungsi sebagai
sensor pendeteksi ketinggian zat cair dalam sebuah sistem otomatisasi.
4. Studi awal tentang system kecerdasan.
5. Studi awal dalam pembuatan perancangan penghitung volume bahan bakar
sepeda motor dengan mikrokontroler AT-MEGA8535 secara software
sebagai otak dari seluruh system.
1.3 Batasan Masalah
Mengacu pada hal diatas maka penulis membuat sistematika pembahasan
dalam Sistem Perancangan sistem penghitung volume bahan bakar sepeda motor
berbasis Mikrokontroler Atmega8535 secara software, dengan batasan-batasan
sebagai berikut:
1. Pembahasan pada program mikrokontroler Atmega8535.
2. Sensor yang digunakan adalah Ping UltraSonic sebagai sensor yang
mendeteksi ketinggian objek yang akan diukur dan programnya dan
Mikrokontroler ATMega8535 dan ISD2560 beserta program. Pembahasan
hanya sebatas pemrograman mikrokontroler dan interfacing untuk
pemrograman dari komputer ke mikrokontroler tidak dibahas.
3. Pengujian alat dilakukan pada kondisi yang statis, tidak ekstrim (mis: objek
yang diukur dalam keadaan tenang, dan tidak terlalu terguncang. Serta
sensor tidak mengenai cairan atau objek yang diukur.
4. Tangki yang digunakan yaitu tangki yang memiliki volume ± 3.5 L dengan
ukuran (12x20x15)Cm . Referensi data perbandingan volume bahan bakar
per liter dan jarak tempuh yang digunakan tiap liter bahan bakar yaitu
menggunakan spesifikasi sepeda motor Honda supra Fit dengan konsumsi
60km/1 liter.
1.4 Metode Pengumpulan Data
Metoda pengumpulan data yang dilakukan oleh perancang adalah:
1. Melakukan studi ke perpustakaan mengenai teori-teori yang berkaitan
dengan judul Tugas akhir ini.
2. Mengumpulkan dan membaca data sheet mengenai komponen yang
digunakan.
3. Melakukan perancangan, pemrograman dan perakitan proyek .
4. Melakukan konsultasi dengan dosen pembimbing serta dosen-dosen staff
pengajar yang berkaitan dengan realisasi di bidang masing-masing.
1.5 Sistematika Penulisan
BAB I : PENDAHULUAN
Bagian ini meliputi latar belakang masalah, tujuan
penulisan, batasan masalah, metode pengumpulan data, dan
sistematika penulisan.
BAB II : LANDASAN TEORI
Pada bagian ini akan dijelaskan landasan teori meliputi
arsitektur dan konstruksi mikrokontroler ATMega8535
(Hardware dan software), cara kerja dan program yang
dipergunakan mikrokontroler ATMega8535, selain itu juga
membahas komponen pendukung lainnya yang berhubungan
dengan proyek yang akan dikerjakan yaitu perancangan
penghitungan volume bahan bakar sepeda motor.
BAB III : PERANCANGAN SISTEM
Pada bagian ini akan dijelaskan tentang perancangan alat
yang meliputi diagram blok,skematik dari masimg-masing
rangkaian, diagram alir, serta program yang diisikan ke
BAB IV : PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas pengujian rangkaian dan hasil
pengujian dari Masing - masing pada rangkaian serta di
isikan program ke Mikrokontroler ATmega8535.
BAB V : KESIMPULAN DAN SARAN
Bagian ini merupakan penutup yang meliputi tentang
kesimpulan dari pembahasan yang dilakukan dari laporan
proyek ini serta saran yang diberikan demi kesempurnaan
dan pengembangan proyek ini pada masa yang akan datang
BAB II
LANDASAN TEORI
2.1. Mikrokontroler ATMega8535
Mikrokontroler, sesuai namanya adalah suatu alat atau komponen
pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada
mikrokontroler, telah ada terlebih dahulu muncul mikroprosesor. Bila
dibandingkan dengan mikroprosesor, mikrokontroler jauh lebih unggul karena
terdapat berbagai alasan, diantaranya :
1. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia sementara pada
mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O
yang dimaksud adalah PPI 8255.
2. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga
mutlak harus ada. Mikroprosesor belum memiliki memori internal sehingga
memerlukan IC memori eksternal. Dengan kelebihan-kelebihan di atas, ditambah
dengan harganya yang relatif murah sehingga banyak penggemar elektronika yang
kemudian beralih kemikrokontroler. Namun demikian, meski memiliki berbagai
mikrokontroler. Inti kerja dari keduanya adalah sama, yakni sebagai pengendali
suatu sistem.
Mikrokontroler merupakan komputer di dalam chip yang digunakan untuk
mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas
biaya. Secara harfiahnya bisa disebut “pengendali kecil“ dimana sebuah sistem
elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung
seperti IC TTL dan CMOS dapat direduksi / diperkecil dan akhirnya terpusat serta
dikendalikan oleh mikrokontroler ini. Dengan menggunakan mikrokontroler ini
maka:
1. Sistem elektronik akan menjadi lebih ringkas.
2. Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar
dari sistem adalah perangkat lu nak yang mudah dimodifikasi.
3. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak.
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi
komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk
aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran input dan
output (I/O). dengan kata lain, mikrokontroler adalah versi mini atau mikro
dari sebuah komputer karena mikrokontroler sudah mengandung beberapa
bagian yang langsung bisa dimanfaatkan, misalnya port paralel, port
serial, komparator, konversi digital ke analog (DAC), konversi analog ke
digital (ADC), dan sebagainya hanya menggunakan Minimum System
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya
mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai
tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam
suatu kemasan IC. Mikrokontroler AVR (Alf and Vegard’s RISC processor) standar
memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan
sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan
instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur
CISC (seperti komputer).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga
ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya
yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya.
Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir
sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu ATMega
8535. Selain mudah didapatkan dan lebih murah ATMega 8535 juga memiliki
fasilitas yang lengkap. Untuk tipe AVR ada 3 jenis yaitu ATTiny, AVR klasik,
dan ATMega. Perbedaannya hanya pada fasilitas dan I/O yang tersedia serta
fasilitas lain seperti ADC, EEPROM, dan lain sebagainya. Salah satu contohnya
adalah ATMega 8535. Memiliki teknologi RISC dengan kecepatan maksimal 16
MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan varian MCS51.
Dengan fasilitas yang lengkap tersebut menjadikan ATMega 8535 sebagai
Gambar 2. 1 Blok Diagram ATMega8535
Dari gambar tersebut dapat dilihat bahwa ATMega 8535 memiliki bagian sebagai
berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
11.Antarmuka komparator analog..
12.Port USART untuk komunikasi serial.
KapabilItas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit bebrbasis RISC dengan kecepatan maksimal 16
MHz.
2. Kapabiltas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM
(Electrically Erasable Programmab le Read Only Memory) sebesar
512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
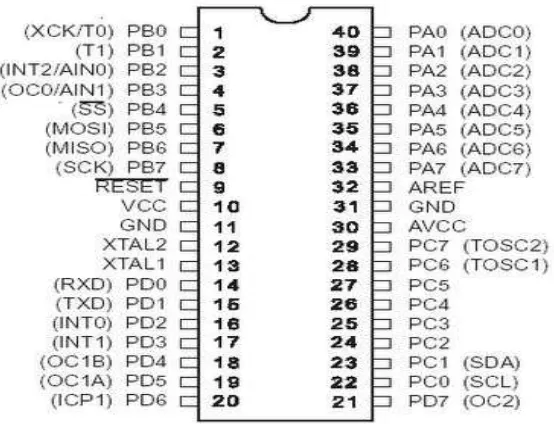
2.1.1. Konfigurasi PIN ATMega8535
Mikrokontroler ATMega8535 mempunyai jumlah pin sebanyak 40 buah,
dimana 32 pin digunakan untuk keperluan port I/O yang dapat menjadi pin
input/output sesuai konfigurasi. Pada 32 pin tersebut terbagi atas 4 bagian (port),
yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk
keperluan rangkaian osilator, supply tegangan, reset, serta tegangan referensi untuk
ADC. Untuk lebih jelasnya, konfigurasi pin ATMega8535 dapat dilihat pada
Gambar 2.2 Konfigurasi Pin ATMega8535
Berikut ini adalah susunan pin-pin dari ATMega8535;
VCC merupakan pin yang berfungsi sebagai pin masukkan catu daya GND merupakan pin ground
Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/Counter, Komparator Analog, dan SPI
Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, Komparator Analog, dan Timer Oscilator
Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Komparator Analog, Interupsi Iksternal dan komunikasi serial USART
XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal (osilator menggunakan kristal, biasanya dengan frekuensi 11,0592 MHz).
Pada pengapliasiannya hanya port B dan port D. sedangkan port A hanya
digunakan 1 pin saja. Sedangkan port C hanya digunakan beberapa pin saja.
2.1.2. Peta Memori ATMega8535
ATMega8535 memiliki dua jenis memori yaitu Program Memory dan Data
Memory ditambah satu fitur tambahan yaitu EEPROM Memory untuk penyimpan
data.
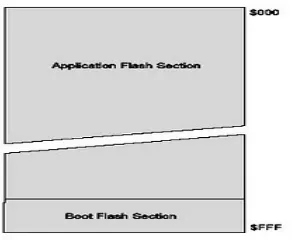
2.1.3. Program Memory
ATMEGA 8535 memiliki On-Chip In-System Reprogrammable Flash
Memory untuk menyimpan program. Untuk alasan keamanan, program memory
dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section.
Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu
program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi yang
dibuat user. AVR tidak dapat menjalakan program aplikasi ini sebelum
menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat
deprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit
di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application
Gambar 2. 3 Peta Memori Program
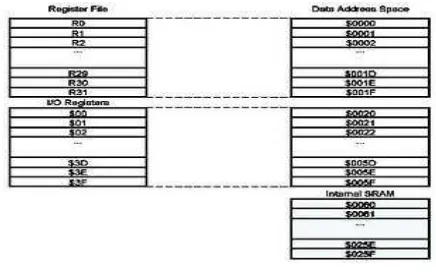
2.1.4. Data Memory
Gambar berikut menunjukkan peta memori SRAM pada ATMEGA 8535. Terdapat 608 lokasi address data memori. 96 lokasi address digunakan untuk
Register File dan I/O Memory sementara 512 likasi address lainnya digunakan
untuk internal data SRAM. Register file terdiri dari 32 general purpose working
Gambar 2. 4 Peta Memori Data
2.1.5. EEPROM Data Memory
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk
menyimpan data. Loaksinya terpisah dengan system address register, data register
dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai
dari $000 sampai $1FF.
Gambar 2. 5 EEPROM Data Memory
2.1.6. Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap
dari inti CPU mikrokontroler. Berikut ini bentuk dari status register dan
penjelasannya :
Gambar 2. 6 Status Register ATMega 8535
Bit 7 – I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat
dijalankan. Bit ini akan clear ketika ada interrupt yang dipicu dari hardware,
setelah program interrupt dieksekusi, maka bit ini harus di set kembali
dengan instruksi SEI.
Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau
tujuan dalam operasi bit.
Bit 5 – H: Half Carry Flag
Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s
Complement Overflow Flag V.
Bit 3 – V : Two’s Complement Overflow Flag
Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghaslkan bilangan nol, maka bit ini akan set.
Bit 0 – C : Carry Flag
Jika suatu operasi menghasilkan Carry, maka bit ini akan set.
2.2. Sensor Ultrasonic
Sensor ultrasonic adalah sensor yang bekerja berdasarkan prinsip pantulan
gelombang dimana sensor menghasilkan gelombang pantulan ke benda yang
kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar
perhitungannya.. Perbedaan waktu antara gelombang pantulan yang di kembalikan
dan yang diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek
yang memantulkannya.. Jenis objek yang dapat di indranya adalah padat, cair dan
butiran. Tanpa kontak jarak 2 cm sampai 3 meter dan dapat dengan mudah
dihubungkan dengan mikrokontroler malalui satu pin I/O saja.
Gambar 2.7. Sensor Ultrasonic
Spesifikasi: :
* Memiliki 2 jenis antarmuka yang dapat aktif bersamaan, yaitu I2C-bus (fSCL maks. 65 kHz) dan pulse width (10µs/mm).
* 8 modul dapat digunakan bersama dalam satu sistem I2C-bus yang hanya membutuhkan 2 pin I/O mikrokontroler saja.
* Membutuhkan catu daya tunggal +5 VDC, dengan konsumsi arus 17 mA typ. (tanpa sensor infrared ranger).
* Terdapat 2 mode operasi yaitu full operation dan reduced operation. Pada mode reduced operation beberapa komponen ultrasonic ranger akan dimatikan (saat
idle) dan konsumsi arus mejadi 13 mA typ.
* Terdiri dari sebuah ultrasonic ranger dengan spesifikasi: Mengukur jarak dari 2 cm hingga 3 m tanpa dead zone atau blank spot. Obyek dalam jarak 0 - 2 cm
frekuensi 40 kHz.
* Dapat dihubungkan dengan maksimum 2 buah infrared ranger Sharp GP2D12 yang memiliki jangkauan pengukuran 10 - 80 cm.
* Data keluaran sudah siap pakai dalam satuan mm (untuk antarmuka I2C) sehingga mengurangi beban mikrokontroler.
*
Ketelitian pengukuran jarak (ranger) adalah 5mm.
* Siklus pengukuran yang cepat, pembacaan dapat dilakukan tiap 25 ms (40 Hz rate).
* Memerlukan input trigger berupa pulsa negatif TTL (20µs min.) untuk antarmuka pulse width.
* Tersedia 1 pin output yang menunjukkan aktifitas sensor, dapat tidak dimanfaatkan.
* Tidak diperlukan waktu tunda sebelum melakukan pengukuran berikutnya.
* Kompensasi kesalahan dapat diatur secara manual untuk mengurangi pengaruh faktor perubahan suhu lingkungan dan faktor reflektifitas obyek.
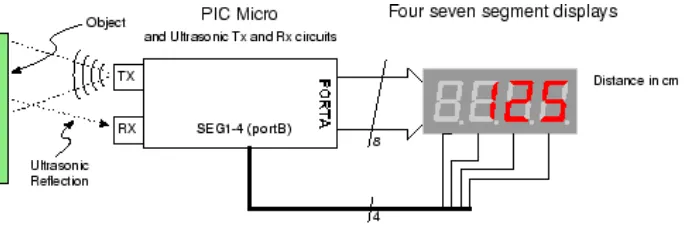
Blok diagram ini di lengkapi dengan tampilan seven segment agar kita bisa
Gambar 2.8. Blok Sensor Ultrasonic dengan Tampilan Seven Segment
Kita lihat secara seksama cara kerja sensor ultrasonic dengan cara memantulkan
gelombang ke sebuah objek kemudian data yang di pantulkan menentukan jarak
dari sensor ke objek.
Gambar 2.9. Ilustrasi cara kerja sensor
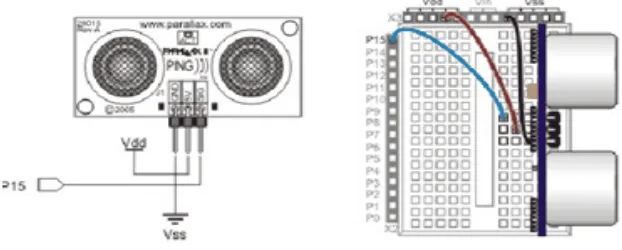
Gambar 2.10. Skematik hubungan pin
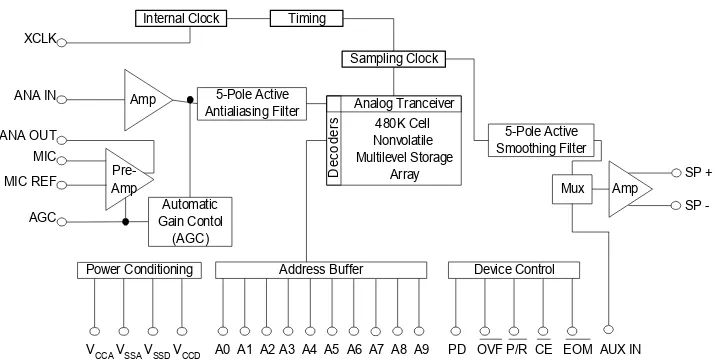
2.3. ISD2560
2.3.1 Pengolah Sinyal Suara
Pengolah sinyal suara adalah bagian yang mengolah sinyal suara analog
menjadi sinyal suara digital, yang akhirnya sinyal suara hasil rekaman dapat
disimpan dalam memori IC. Selain itu bagian ini juga mengubah sinyal suara digital
menjadi sinyal suara analog kembali sehingga rekaman yang tersimpan dapat
diperdengarkan (diputar ulang), untuk dapat melakukan perekaman dan pemutaran
ulang rekaman digunakan IC khusus yaitu ISD2560/75/90/120 “Single-Chip,
Multiple-Mesage, Voice Record/Playback Device” yang merupakan produk dari
ISD2560 adalah single-chip dengan kualitas tinggi, dengan durasi rekam
atau putar ulang (Record/Playback) antara 60 sampai 120 detik. Merupakan
komponen CMOS yang terdiri atas on-chip oscillator, microphon preamplifier,
aoutomatic gain control, antialiasing filter, smoothing filter, speaker preamplifier,
dan high density multi-level storage array.
2.3.2 Ciri-Ciri ISD2560
ISD2560 mempunyai ciri-ciri sebagai berikut :
Single-chip mudah digunakan untuk merekam suara atau memutar ulangnya.
Kualitas suara atau audio yang dihasilkan tinggi dan tampak alami.
Single-chip dengan durasi 60,75,90 dan 120 detik.
Dapat digunakan dengan atau tanpa mikrokontroler.
Secara langsung merekam dalam durasi yang panjang.
Power Down (PD) otomatis (mode Push-button).
Penyimpanan pesan dengan daya nol.
Dapat dialamatkan secara langsung untuk mengatasi pesan yang panjang.
Penyimpanan pesan selama 100 tahun.
Siklus perekaman 100.000 kali.
Sumber clock on-chip.
Dapat diprogram untuk aplikasi putar ulang semata.
Diagram Blok
Konfigurasi Pin
Gambar 2.12 Konfigurasi Pin ISD2560
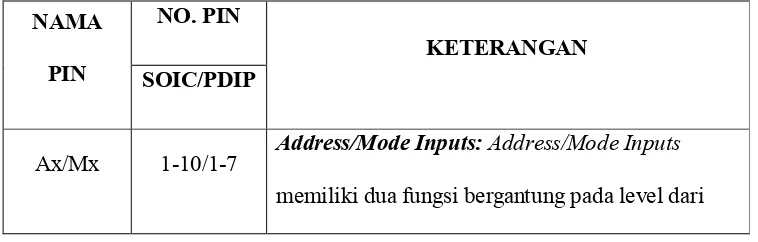
2.3.3 Deskripsi Pin
Adapun fungsi-fungi dari pin ISD2560 adalah seperti diuraikan pada tabel
berikut ini :
dua buah Most Significant Bits (MSB) dari pin-pin
alamat (A8 dan A9).
Jika salah satu atau kedua MSB dalam kondisi
RENDAH,
semua masukan diinterpretasikan sebagai bit alamat
dan digunakan sebagai alamat awal untuk siklus
perekaman atau putar ulang
Jika kedua MSB dalam kondisi TINGGI,
Address/mode Inputs diinterpretasikan sebagai Mode
bits according untuk Mode Operasional
(Operational Mode). Ada 6 mode operasi (M0...M6)
dan memungkinkan untuk menggunakan banyak
mode operasional secara simultan
AUX IN 11
Auxiliary Inputs: AUX IN digunakan untuk
menghubungkan sinyal playbackdengan speaker
VSSA,VSSD 13,12 Ground
differensial speaker driver, terbatas pada 50mW
sampai 16 ohm
VCCA/VCCD 16,28 Supply Voltage
MIC 17
Microphone: Mikrofon mentransfer sinyal masukan
menuju on-ship preamplifier.Rangkaian Automatic
Gain Control (AGC) mengontrol gain preamplifier
mulai dari -15 sampai 24dB
MIC REF 18
Microphone Reference: Masukan MIC REF
merupakan masukan inverting untuk mikrofon
preamplifier
AGC 19
Aoutomatic Gain Control: Dengan adanya AGC
dapat meminimalkan distorsi suara yang direkam
ANA IN 20
Analog Input: Analog Input mentrasfer sinyal
masukan analog pada chip untuk direkam. Untuk
masukan mikrofon, pin ANA OUT harus
dihubungkan dengan pin ANA IN melalui kapasitor
eksternal
ANA OUT 21 Analog Output: Preamplifier output.
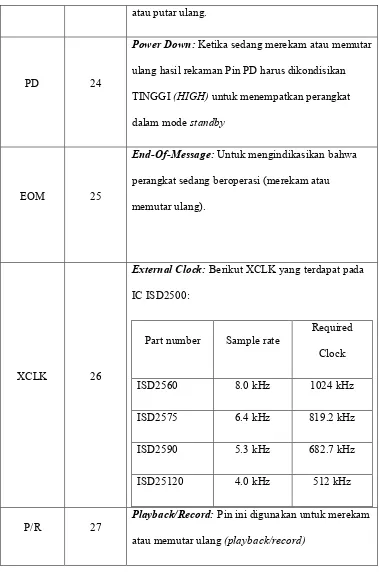
OVF 22
Overflow: Untuk mengindikasikan bahwa piranti
telah terisi penuh dengan pesan (pesan berlebihan)
CE 23 Chip Enable: Pin CE diberi kondisi RENDAH
atau putar ulang.
PD 24
Power Down: Ketika sedang merekam atau memutar
ulang hasil rekaman Pin PD harus dikondisikan
TINGGI (HIGH) untuk menempatkan perangkat
dalam mode standby
EOM 25
End-Of-Message: Untuk mengindikasikan bahwa
perangkat sedang beroperasi (merekam atau
memutar ulang).
XCLK 26
External Clock: Berikut XCLK yang terdapat pada
IC ISD2500:
Part number Sample rate
Required
Playback/Record: Pin ini digunakan untuk merekam
atau memutar ulang (playback/record)
2.3.4 Mode Operasional
ISD2560 didesain dengan beberapa Mode Operasional. Mode Operasional
diakses melalui pin alamat dan digambarkan sebagai daerah alamat pesan normal.
Ketika kedua Most Significant Bits (MSB), A8 dan A9 dikondisikan tinggi maka
sinyal alamat diinterpretasikan sebagai mode bits bukan alamat bits. Karenanya
mode operasional dan pengalamatan langsung tidak kompatibel dan tidak dapat
digunakan secara bersamaan.
Ada dua hal yang perlu diperhatikan ketika menggunakan Operasional Mode.
Pertama, semua operasi dimulai dengan alamat 0. operasi selanjutnya dapat dimulai
dengan lokasi alamat lain, bergantung Mode Operasional yang dipilih.
Kedua, Mode Operasional dieksekusi ketika CE berkondisi rendah. Adapun
beberapa Mode Operasional digambarkan dengan tabel berikut :
Mode Fungsi Kegunaan Tipikal Gabungan yang Kompatibel M0 Message Cueing Fast-forward through message M4,M5,M6 M1 Hapus EOM Posisi EOM setelah pesan terakhir M3,M4,M5,M6
M2 Tidak
diaplikasikan Reserved N/A
M3 Pengulangan Putar ulang berlanjut dari alamat 0 M1,M5,M6
M4 Consecutive
addressing Record/playback multiple M0,M1,M5
consecutive message
M5 CE
M6 Kontrol
push-button Simplified device interface M0,M1,M3
Tabel 2.2 Mode Operasional
2.3.5 Deskripsi Mode Operasional
M0-Message Cueing
M1-Delete EOM Markers
M2-Unused
M3-Message Looping
M4-Consecutive Addressing
M5-CE-Level Actoivated
M6-Push Button Mode
2.4 Liquid Crystal Display (LCD)
LCD (Liquid cristal display) adalah salah satu komponen elektronika yang
berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. Jenis
LCD yang dipakai pada alat ini adalah LCD M1632. LCD terdiri dari dua bagian,
bentuk huruf/angka dua baris, masing–masing baris bisa menampung 16
huruf/angka.LCD (Liquid Crystal Display) adalah modul penampil yang banyak
digunakan karena tampilannya menarik. LCD yang umum, ada yang panjangnya
hingga 40 karakter (2x40 dan 4x40), dimana kita menggunakan DDRAM untuk
mengatur tempat penyimpanan tersebut.(Gamayel.Rizal, 2007). Di bawah ini adalah
gambar LCD 2x16 karakter.
Gambar 2.13. LCD karakter 2x16
Bagian kedua merupakan sebuah sistem yang dibentuk dengan
mikrokontroler yang ditempel dibalik pada panel LCD, berfungsi mengatur
tampilan LCD. Dengan demikian pemakaian LCD M1632 menjadi sederhana,
sistem lain cukup mengirimkan kode – kode ASCII dari informasi yang
ditampilkan.
Spesifikasi LCD M1632:
1. Tampilan 16 karakter 2 baris dengan matrik 5 x 7 + kursor.
2. ROM pembangkit karakter 192 jenis.
4. RAM data tampilan 80 x 8 bit ( 8 karakter ).
5. Duty ratio 1/16.
6. RAM data tampilan dan RAM pembangkit karakter dapat dibaca dari
unit mikroprosesor.
7. Beberapa fungsi perintah antara lain adalah penghapusan tampilan
(display clear), posisi kursor awal ( crusor home ), tampilan karakter
kedip (display character blink), penggeseran kursor ( crusor shift ) dan
penggeseran tampilan (display shift).
8. Rangkaian pembangkit detak.
9. Rangkaian otomatis reset saat daya dinyalakan.
10. Catu daya tunggal +5 volt.
(Andi, N. Paulus, 2004).
2.5. Catu Daya
Tegangan yang di butuhkan oleh peralatan elektronik adalah tegangan rendah yaitu
kurang atau sama dengan 24 volt DC. Sehingga diperlukan sebuah alat yang dapat
menurunkan tegangan dan disearahkan sehingga menghasilkan tegangan DC
penghasil tegangan DC. Penurun tegangan ini berupa autotrafo dan penghasil
tegangan DC berupa penyearah jembatan.
PING
BAB III
RANCANGAN SISTEM
3.1. Diagram Blok dan Cara Kerja Rangkaian
Berikut ini adalah diagram blok dari rangkaian yang dibuat:
Gambar 3.1. Diagram Blok Rangkaian Penghitung
Sensor ping ultrasonic akan mengindera keberadaan bahan bakar bensin
dalam tangki. Sedangkan ISD25120 digunakan untuk Pengolah sinyal suara,
adalah merupakan bagian yang mengolah sinyal suara analog menjadi sinyal
suara digital, yang akhirnya sinyal suara hasil rekaman dapat disimpan dalam
memori IC.
a. Power supply berfungsi sebagai sumber tegangan dari seluruh sistem
b. AVR ATmega8535 merupakan pusat kendali dari seluruh rangkaian.
Dimana mikrokontroller akan mengecek sinyal yang dikirimkan oleh
sensor, kemudian memprosesnya dan mengirimkan perintah ke ISD2560
dan LCD.
c. Sensor ping ultrasonic berfungsi untuk mendeteksi ketinggian volume
bensin.
d. ISD2560 berfungsi untuk memproses data yang dikirim oleh
mikrokontroller dan menyesuaikannya dengan suara yang telah direkam
lalu mengirim kembali data tersebut ke speaker.
e. LCD berfungsi sebagai indikator keluaran yang menampilkannya
dalam bentuk tulisan.
f. Speaker dan Buzzer berfungsi sebagai indikator keluaran dalam bentuk
suara dimana hasil keluarannya sama dengan hasil yang ditampilkan LCD.
3.2 Perancangan Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh
rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini
terdiri dari satu keluaran, yaitu 5 volt. Keluaran 5 volt digunakan untuk
mensupplay tegangan ke rangkaian mikrokontroller AVR Atmega8535,
rangkaian IDS2560, dan LCD. Rangkaian catu daya ditunjukkan pada
Gambar 3.2 Rangkaian Catu Daya
Baterai merupakan sumber tegangan DC. Kemudian tegangan akan
disearahkan dengan menggunakan jembatan dioda, selanjutnya akan
diratakan oleh kapasitor 220 µF. Regulator tegangan 5 volt (7805)
digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi
perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila
Catu daya dinyalakan. Tegangan 5 volt DC langsung diambil dari keluaran
jembatan dioda penyearah gelombang penuh.
3.3 Rangkaian Sensor Ultrasonic
Di dalam blok sensor ultrasonic ada 2 rangkaian yang saling
berhubungan yaitu Transmitter sebagai pengirim data dari objek ke benda dan
Receiver sebagai penerima data dari benda ke objek seperti terlihat pada
Gambar 3.3. Rangkaian Transmitter Ultrasonic
Gambar 3.4. Rangkaian Receiver ultrasonic
Jarak antara ultrasonic tranducer Rx dan Tx mempengaruhi kinerja
alat dalam aplikasi ini. Pengaturan resistor variabel R6 pada rangkaian
receiver dapat dilakukan saat rangkaian dinyalakan yaitu dengan acuan
tampilan LCD. Bila LCD selalu menampilkan “Distance = 001 cm” berarti
jendela komparator terlalu sempit sehingga dapat di-trigger oleh gelombang
Gambar 3.5. Jarak antara Tx – Rx
Rangkaian ultrasonic transducer terbagi 2 yaitu rangkaian receiver dan
rangkaian transmitter, skematik rangkaian terdapat pada Gambar 3.2 dan
Gambar 3.3. Pada Gambar 3.3. resistor variabel R6 berfungsi untuk mengatur
jendela komparator yang akan berpengaruh pada sensitivitas receiver dan juga
mempengaruhi daya ukur alat ini secara keseluruhan. Dengan pengaturan R6
yang baik, alat ini dapat mengukur jarak minimum 2 cm dan maksimum 300
cm dengan cukup baik.
Jika gelombang ultrasonik merambat dalam suatu medium, maka
partikel Medium mengalami perpindahan energi. Besarnya energi gelombang
ultrasonik yang dimiliki partikel medium. Maka kita perhatikan pulsa di
bawah ini adalah keluaran gelombang ultrasonic :
3.4. Perancangan Rangkaian Sensor Ultrasonic dengan Mikrokontroller AVR Atmega8535
Gambar 3.7. Rangkaian sensor ultrasonic dengan Mikrokontrolller AVR ATmega8535
Sensor ping ultrasonic memiliki tegangan kerja 5 Volt namun outputnya
pulsa yang hasilnya akan dikirim ke mikro untuk di olah lebih lanjut .
Rangkaian diatas berfungsi untuk mengendalikan seluruh sistem. Kompoen
utama dari rangkaian ini adalah IC mikrokontroller ATmega8535. Pada IC
Mikrokontroller ini memiliki 32 port I/O, yaitu port A, port B, port
C dan port D. Pin 33 sampai 40 adalah Port A yang merupakan port ADC,
dimana port ini dapat menerima data analog. Pin 1 sampai 8 adalah port B.
Pin 22 sampai 29 adalah port C. Dan Pin 14 sampai 21 adalah port D. Pin 10
dihubungkan ke sumber tegangan 5 volt. Dan pin 11 dihubungkan ke
ground. Rangkaian mikrokontroller ini menggunakan komponen kristal
sebagai sumber clock-nya. Nilai kristal ini akan mempengaruhi
kecepatan mikrokontroller dalam mengeksekusi suatu perintah
tertentu.
Pin 12 dan 13 dihubungkan ke XTAL 8 MHz dan dua buah kapasitor
22pF. XTAL ini akan mempengaruhi kecepatan mikrokontroller AVR
Atmega8535 dalam mengaksekusi setiap perintah dalam program. Pada pin 9
dihubungkan dengan sebuah kapasitor dan sebuah resistor yang
dihubungkan ke ground. Kedua komponen ini berfungsi agar program
pada mikrokontroller dijalankan beberapa saat setelah power aktif. Lamanya
waktu antara aktifnya power pada IC mikrokontroller dan aktifnya
3.5. Perancangan Rangkaian LCD
Gambar 3.8. Rangkaian Display LCD
LCD terdiri dari sejumlah memory yang digunakan untuk display.
Semua teks yang kita tuliskan ke LCD akan disimpan didalam memory ini,
dan LCD secara berturutan membaca memory ini untuk menampilkan teks ke
LCD itu sendiri.
Pada peta memori tersebut, daerah yang berwarna biru ( 00 s/d 0F dan
40 s/d 4F ) adalah display yang tampak. Sebagaimanan yang anda lihat,
jumlahnya sebanyak 16 karakter per-baris dengan dua baris. Angka pada
setiap kotak adalah alamat memori yang bersesuaian dengan posisi dari
layar. Demikianlah karakter pertama di sudut kiri atas adalah menempati
alamah 00h. Posisi karakter berikutnya adalah alamat 01h dan seterusnya.
Akan tetapi, karakter pertama dari baris 2 sebagaimana yang ditunjukkan
mengirim sebuah perintah ke LCD untuk mangatur letak posisi kursor pada
baris dan kolom tertentu. Instruksi Set Posisi Kursor adalah 80h. Untuk ini
kita perlu menambahkan alamat lokasi dimana kita berharap untuk
menempatkan kursor. Sebagai contoh, kita ingin menampilkan kata ”World”
pada baris ke dua pada posisi kolom ke sepuluh. Sesuai peta memori, posisi
karakter pada kolom 11 dari baris ke dua, mempunyai alamat 4Ah, sehingga
sebelum kita tulis kata ”World” pada LCD, kita harus mengirim instruksi set
posisi kursor, dan perintah untuk instruksi ini adalah 80h ditambah dengan
alamat 80h+4Ah =0Cah. Sehingga dengan mengirim perintah Cah ke LCD,
akan menempatkan kursor pada baris kedua dan kolom ke 11 dari
DDRAM.
Set Alamat Memori DDRAM
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1
0 0 1 A A A A A A
Catatan:
A : Alamat RAM yang akan dipilih
3.6. Perancangan Rangkaian ISD2560
Gambar 3.9. Rangkaian ISD2560
Penjelasan dari rangkaian diatas adalah ketika kita ingin melakukan perekaman
suara, maka yang perlu kita lakukan yaitu menentukan alamat dimana suara akan
disimpan. Dengan menentukan alamat contoh 0x00-0x02 maka mikro akan mudah
dalam mendeteksi dimana tempat suara itu disimpan. Setelah itu tekan pin CE dan P/R
secara bersamaan kemudian ucapkan suara yang ingin direkam dengan microfon yang
tersedia.
Perancangan pada rangkaian penyimpanan pesan ini, terbagi atas
empat tahapan, yaitu :
1. Proses perekaman suara dari micropon ke PC (Personal
Computer).
2. Proses pengalamatan ISD2560.
3. Proses perekaman suara dari PC ke rangkaian penyimpan pesan.
BAB IV
ANALISA RANGKAIAN
4.1. Pengujian dan Analisa Rangkaian Sensor Ultrasonic
Pada gambar 3.3.dan 3.4. tentang rangkaian transmitter dan receiver terletak
dalam 1 komponen melainkan masing- masing mempunyai fungsi. untuk
menganalisa rangkaian ultrasonic dapat di lihat pada pembahasan di bawah ini.
Jika sensor terkena suatu benda, maka secara otomatis LED indikator akan
menyala. Sedangkan jika tidak terhalangi LED indikator akan padam. Dalam
pengujian jarak yang di tentukan adalah sebesar 15 cm. tapi indikator sudah
menyala dalam jarak 13 cm. jadi terdapat error pengukuran sebesar 2 cm.
Tabel 4.1. Data Jarak deteksi Berbagai Halangan
Jarak (cm)
Pengujian
6 8 10 12 14 16
1 5,77 7,71 9,65 11,50 13,50 15,43
2 5,75 7,72 9,66 11,55 13,60 15,45
3 5,75 7,72 9,64 11,50 13,55 15,43
4 5,77 7,72 9,63 11,53 `3,60 15,43
Penjelasan pada table diatas yaitu : Pengujian jarak pendeteksian sensor
ultrasonik dilakukan dengan mendekatkan dan menjauhkan posisi objek yang
ada didepan sensor.untuk mengetahui kepekaan sensor ketika diberikan objek
yang berbeda dilakukan sebanyak 5 kali pada masing-masing objek. Jarak dari
objek di variasikan mulai dari 6cm, 8cm, 10 cm, 12cm, 14cm, 16cm . Setiap
pengujian akan menghasilkan pembacaan yang berbeda walau dengan jarak
yang sama, tetapi perbedaanya tidak terlalu besar karena error yang terjadi
hanya sekitar 2cm. Tujuan dari pengujian itu untuk mendapatkan nilai yang
akurat, misalnya pengujian dengan jarak 6cm menghasilkan nilai pembacaan
5,77. Untuk prcobaan kedua masih dengan jarak yang sama tetapi menghasilkan
pembacaan 5,75 sehingga kita dapat menyimpulkan, dari 5 kali percobaan
tersebut nilai mana yang lebih sering muncul, maka nilai itulah yang digunakan
untuk diinputkan ke dalam mikrokontroler, ini dilakukan karena terdapat eror
sekitar 2cm.
Hasil pengujian dapat membuktikan bahwa sensor ultrasonik bekerja
berdasarkan kemampuan penghalang memantulkan kembali gelombang
ultrasonik yang dikirim oleh sensor ultrasonik, gangguan pada pendeteksiaan
sensor dapat diakibatkan oleh penghalang yang tidak mampu memantulkan
gelombang bunyi dengan baik dan adanya interferensi gelombang dengan
Tabel 4.2. Data Sensor Ultrasonic
Jarak Total (cm) Jarak Pantul (cm) Nilai Pulsa (mS)
0 2 0
dalam pengukuran menggunakan sistem perhitungan dan setiap 1 gelombang
4.2. DiagramAlir(flowchart)
Adapun diagram alir (flowchart) dari sistema adalah sebagai berikut:
Gambar 4.1. Diagram alir (flowchart) dari sistem Output Suara dan Display digital
Tampilan lcd Output suara Kapasitas bensin
PING mengukur ketinggian bensin
Inisialisasi program
Program diawali start yang berarti rangkaian dihidupkan
dengan menekan tombol power pada rangkaian PSA. Kemudian
rangkaian akan melakukan prosesing selama 60 detik untuk mendeteksi
ketinggian bensin pada wadah yang ada dan vo l u m e (data) yang dibaca
adalah h a s i l p er h i t u n g a n d a r i t i n g g i yang terdeteksi oleh sensor
ultrasonic. Kemudian, mikrokontroller akan mengirim perintah ke
ISD2560 yang kemudian akan diproses yang nantinya output akan
dikeluarkan melalui speaker sebagai indikator suara, dan
mikrokontroller juga mengirim data ke LCD yang outputnya
dikeluarkan dalam bentuk tampilan tulisan.
4.2.1. Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui
tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur
tegangan keluaran dari power supply menggunakan multimeter digital.
Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran
sebesar 5 volt.Dengan begitu dapat dipastikan apakah terjadi kesalahan
terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan
tidak murni sebesar +9 Volt dan +12 Volt, tetapi +8.97Volt dan +12.03
Volt. Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari
tiap-tiap komponen yang digunakan nilainya tidak murni. Selain itu,
4.2.2. Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat
dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power
supply sebagai sumber tegangan. Kaki 10 dihubungkan dengan sumber
tegangan 5 volt, sedangkan kaki 11 dihubungkan dengan ground. Kemudian
tegangan pada kaki 10 diukur dengan menggunakan Voltmeter. Dari hasil
pengujian didapatkan tegangan pada kaki 10 sebesar 4,9 volt. Langkah
selanjutnya adalah memberikan program sederhana pada mikrokontroler
ATMega 8535, program yang diberikan adalah sebagai berikut:
4.2.3. Pengujian Rangkaian Liquid Crystal Display (LCD) 2x16
Pengetesan ini bertujuan untuk mengetahui apakah LCD tersebut
dapat menampilkan pesan-pesan sesuai dengan proses yang diharapkan.
Listing program
Pengetesan LCD :
// LCD module initialization
lcd_init(16);
lcd_gotoxy(0,0);
lcd_putsf("uji");
lcd_gotoxy(0,1);
lcd_putsf("coba") ;
Analisa Pengujian LCD :
Setelah program pengujian LCD didownload ke modul, maka pada layar
LCD akan menghasilkan tampilan sebagai berikut :
Pada baris 1 tampil ‘ uji ‘ dan baris 2 tampil ‘ coba’
4.3. Analisa Program
C adalah bahasa pemrograman yang dapat dikatakan berada antara
bahasa tingkat rendah (bahasa yang berorientasi pada mesin) dan bahasa
tingkat tinggi (bahasa yang berorientasi pada manusia).Seperti yang
diketahui, bahasa tingkat tinggi mempunyai kompatibilitas antara
mesin.Berbeda halnya dengan menggunakan bahasa mesin, sebab setiap
perintahnya sangat bergantung pada jenis mesin.
Pembuat bahasa C adalah Brian W. Kernighan dan Dennis M. Ritchie pada
tahun 1972. C adalah bahasa pemrograman terstruktur, yang membagi
program dalam bentuk blok. Tujuannya untuk memudahkan dalam
pembuatan dan pengembangan program. Program yang ditulis dengan
bahasa C mudah sekali dipindahkan dari satu jenis program ke bahasa
program lain. Hal ini karena adanya standarisasi bahasa C yaitu berupa
standar ANSI ( American National Standar Institut) yang dijadikan acuan
4.3. Program
Adapun program yang digunakan pada sistem adalah sebagai berikut:
#include <mega8535.h> //library untuk mikro atmega8535
}
void main(void)
{
/*// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T
State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T
State0=T
PORTB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T
State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In
Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T
State0=T
PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
SFIOR=0x00;
// LCD module initialization */
lcd_init(16);
ce = 1;
pr = 1;
PORTD = 0X00;
DDRD = 0XFF;
DDRC.0 = 1;
DDRC.1 = 1;
while (1)
{
//========= Program rutin sensor ultrasonic untuk mengukur ketinggian
bensin
SIG_dir = 1; // set SIG pin as output
SIG_out = 0; //
delay_us(20); // send start pulse
SIG_out = 1; //
SIG_dir = 0; // set SIG pin as input
TCNT1=0;
while (SIG_in); // wait for return pulse
while ((!SIG_in) && !(TIFR & 0x80)); // timing the return pulse
TCCR1B=0x00; // stop timer
US = TCNT1; // save timer value to variable US
US = US/50; // convert to CM
US= US/10;
a=2.8-US; // program untuk mengkonversi ke volume
b=a*2.4; // volume
lcd_clear();
sprintf(Msg2,"tinggi=%3.2f L",b); //hasil pengukuran
lcd_gotoxy(0,0);
lcd_puts(Msg2);
delay_ms(1000);
//=================================
if (b <=3.5 && b >=3.3) //jika volume antara 3,3 L dan 3,5 L
{lcd_gotoxy(0,1); //posisi kursor lcd di baris 1 kolom ke 0
lcd_putsf("volume 3,5 L"); //tampilan lcd
adr = 0x02; //alamat suara
ic_aktif(); //aktifkan suara
adr = 0x04;
ic_aktif();
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Sensor ultrasonic yaitu sensor yang bekerja berdasarkan kemampuan
penghalang memantulkan kembali gelombang yang dipancarkan. Gangguan
dapat terjadi jika penghalang yang digunakan memiliki permukaan yang
tidak rata, sehingga gelombang memantul tidak karuan dan sulit ditangkap
receiver selain itu dapat juga karena interferensi gelombang dengan
frekuensi yang sama.
2. ISD 2560 merupakan IC suara atau lebih tepatnya pengolah sinyal suara
analog menjadi sinyal suara digital. Sebelum menggunakannya harus
terlebih dahulu melakukan proses perekaman. Hasil rekaman dapat
disimpan dalam memori IC dan dapat diputar ulang untuk mendengar hasil
rekaman.
3. Semua sistem diatur oleh ATMEGA8535 yang berfungsi sebagai otak dari
seluruh sistem dan sangat terkoordinasi antara sensor-sensor dan
5.2. Saran
1. Agar rangkaian tidak terganggu, sebaiknya alat ini dikemas dalam bentuk yang lebih aman dan terlindungi, terutama terlindung dari cairan karena
percobaan yang akan dilakukan menggunakan cairan. Selain itu komponen
elektronik juga rentan terhadap air.
2. Untuk pengembangan selanjutnya , ada baiknya tangki yang digunakan benar-benar tangki sepeda motor atau tangkinya dibuat persis seperti
tangki bensin sepeda motor.
3. Alangkah baiknya alat ini dapat dikembangkan dengan bantuan pabrikan sehingga Program yang digunakan dan Perhitungannya lebih teliti dan
akurat. Serta ukuranya dapat diminimalkan, mengingat ukuran prototype
ini tergolong besar, sehingga bisa diaplikasikan pada kendaraan bermotor
DAFTAR PUSTAKA
Bejo,Agus,C&AVRRahasiaKemudahan BahasaC dalamMikokontroler
ATmega8535,GrahaIlmu,YogYakarta,2008.
Budiharto, Widodo.2005. Perancangan system dan Aplikasi Mikrokontroler.
Edisi Pertama.Jakarta: PT Elex Media Komputindo.
Lingga,Wardhana,BelajarSendiri MikrokontrolerAVR SeriATmega8535
Simulasi HardwaredanAplikasi,Andi,Yogyakarta,2006.
Malvino,AlbertPaul,Prinsip–PrinsipElektronika,Jilid1 dan 2,EdisiI,Salemba
Teknika,Jakarta,2003.
http://capoenk.kandangbuaya.com/tag/isd2560/
http://www.ittelkom.ac.id/library/index.php?view=article&catid=16%3
Amikroprocessorkontroller&id=654%3Alcd&option=com_content&I