SISTEM PENGAMAN RUMAH DIGITAL DENGAN MENGGUNAKAN METODE SENSOR GERAK DAN CALLING SELULER
TUGAS AKHIR
DWI ROSA KARUNIA AL-WASIN SIREGAR 072408013
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM PROGRAM STUDI D-III FISIKA INSTRUMENTASI
UNIVERSITAS SUMATERA UTARA MEDAN
SISTEM PENGAMAN RUMAH DIGITAL DENGAN MENGGUNAKAN METODE SENSOR GERAK DAN CALLING SELULER
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar ahli madya
DWI ROSA KARUNIA AL-WASIN SIREGAR 072408013
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM PROGRAM STUDI D-III FISIKA INSTRUMENTASI
UNIVERSITAS SUMATERA UTARA MEDAN
PERSETUJUAN
Judul : SISTEM PENGAMAN RUMAH DIGITAL
DENGAN MENGGUNAKAN METODE SENSOR GERAK DAN CALLING SELULER.
Kategori : TUGAS AKHIR
Nama : DWI ROSA KARUNIA AL-WASIN SIREGAR
Nomor Induk Mahasiswa : 072408013
Program Studi : DIPLOMA TIGA (D3) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Medan, Juli 2010 Disahkan / Disetujui Oleh:
Ketua Program Studi
D3 Fisika Instrumentasi: Dosen Pembimbing:
Drs. Syahrul Humaidi, M.Sc.
PERNYATAAN
SISTEM PENGAMAN RUMAH DIGITAL DENGAN MENGGUNAKAN METODE
SENSOR GERAK DAN CALLING SELULER
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2010
DWI ROSA KARUNI AL-WASIN SIREGAR 072408013
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Allah Subhanahuwata’ala Yang Maha Pengasih serta Maha Penyayang atas segala rahmat dan hidayah-Nya, sehingga penulis akhirnya dapat menyelesaikan Tugas Akhir ini yang merupakan sebagian syarat guna mencapai gelar Ahli Madya. Shalawat dan salam tak lupa penulis hadiahkan kehadiran nabi Muhammad SAW yang merupakan suri tauladan yang seharusnya dicontoh untuk mendapatkan kehidupan yang bahagia di akhir kelak nanti.
Dalam kesempatan ini penulis ingin mengucapakan terima kasih yang mendalam kepada semua pihak yang telah memberikan dukungannya baik moril maupun materil. Untuk itu penulis ingin mengucapkan banyak terima kasih yang sebesar-besarnya kepada:
1. Keluarga tercinta yang paling penulis sayangi dan cintai, terima kasih selama ini telah memberikan cinta dan kasih sayang yang sangat besar kepada penulis, Ayahanda Mukhsin Siregar dan ibunda tercinta Wahyu Nazli yang telah bersusah payah bermandikan keringat memberikan yang terbaik kepada penulis sehingga penulis dapat mengartikan arti hidup dan cinta yang sesungguhnya, abangku yang ku sayang Hardi Karunia Al-Wasin Siregar yang senantiasa selalu mendukung penulis, dan Adikku Srikandi Surya Pertiwi K.A.W Siregar, yang selalu memberi keceriaan untuk penulis, kakak sangat menyayangi mu. (I love my family)
2. Keluarga besar Universitas Sumatera Utara khususnya Departemen Fisika : a. Ketua Departemen Fisika: Dr. Marhaposan Situmorang
b. Ketua Program Studi D3 Fisika Instrumentasi: Drs. Syahrul Humaidi, M.Sc. c. Sekretaris Departemen Fisika: Dra. Yustinon, M.Si,
d. Dan seluruh staf pengajar pada Fakulta MIPA
3. Penulis juga mengucapkan terima kasih yang sebesar-besarnya kepada dosen pembimbing: Drs. Syahrul Humaidi, M.Sc , yang telah mempermudah penulis dalam menyelesaikan Tugas Akhir ini.
(walupun kita semua pernah terjadi selisih paham, tapi kalian tetap terbaik) kifli, imeh, wiwik, ulan, linik, hilaria, dea, asenk, tuya, leo, taufik, iwan, otonk, astir, Montana(mr.ndy) yang selalu ngajari penulis b.inggris thanks so much dan semua anak fin 07 semuanya yang tidak bias penulis sebutin satu persatu, semoga persahabatan kita tetap abadi selamanya karena kalian lah sahabat-sahabat terbaikku, dan yang spesial ku persembahkan untuk someone ku yang selalu menemaniku, selalu ada untukku baik dalam keadaan suka, dan duka, yang selalu sabar menghadapi ku dan terus mensupportku untuk menyelesaikan Tugas Akhir ini. Thank’s, u’re is the best my doe.
Hanya Allah lah yang dapat membalas semua kebaikan kalian semua mudah-mudahan kita menjadi orang yang sukses. Amin!
Dengan penuh kerendahan hati, penulis mengharap kritik dan saran dari semua pihak atas segala kekurangan yang penulis sadari sepenuhnya dalam Tugas Akhir ini, guna perbaikan dikemudian hari.
Wassalam
Medan, Juli 2010 Penulis
072408013
ABSTRAK
Di zaman sekarang ini kebanyakan orang sibuk dengan aktivitasnya diluar rumah. Sehingga lebih sering menghabiskan waktu diluar rumah dibandingkan didalam rumah. Sehingga keamanan rumah tidak lagi terjaga dengan baik. Dan dapat mengundang orang jahat untuk berbuat kriminal. Jadi untuk zaman sekarang ini sangat dibutuhkan alat/sistem untuk menjaga keamanan rumah.
Dari pengalaman diatas maka penulis membuat suatu solusi untuk membantu menjaga keamanan rumah, yaitu suatu Sistem Pengaman Rumah Digital Dengan
Menggunakan Metode Sensor Gerak dan Calling Seluler ini lebih dapat membantu
si pemilik rumah untuk menjaga rumah dari orang yang tidak dikenal. Walaupun pemilik rumah tidak ada dirumah.
DAFTAR ISI
1.5 Sistematika Penulisan 3
BAB 2 Landasan Teori 5
2.1 Perangkat Keras 5
2.1.1 Mikrokontroler 5
2.1.2 Mikrokontroler AT89S51 6
2.2 Perangkat Lunak 9
2.2.1 Software 8051 Editor, Assembler, Simulator (IDE) 9 2.2.2 Software Downloader (ISP – Flash Programmer 3.0a) 10 2.2.3 Software Desain PCB (Printed Circuit Board) Eagle 4.13r 14
2.3 Komponen – Komponen Pendukung 15
2.3.1 Resistor 15
2.3.2 Kapasitor 16
2.3.3 Transistor 17
2.4 Motor Langkah (Motor Stepper) 20
2.5 Photodioda 24
2.6 Relay 28
BAB 3 Perancangan Alat dan Cara Kerja 30
3.1 Diagram Blok Rangkaian 30
3.1.1 Perancangan Power Supply 31 3.1.2 Rangkaian Mikrokontroler AT89S51 32 3.1.3 Rangkaian Display Seven Segment 33
3.1.4 Rangkaian Sensor 34
3.1.5 Rangkaian Pengendali Motor Stepper 36 3.1.6 Rangkaian Pengendali Alarm 38 3.1.7 Rangkaian Pengendali Keypad 40
BAB 4 Pengujian Rangkaian dan Program 43 4.1 Pengujian Rangkaian Mikrokontroller AT89S51 43 4.2 Pengujian Rangkaian Display Seven Segment 44
4.3 Pengujian Rangkaian Relay 47
4.4 Pengujian Rangkaian Sensor 49
4.5 Pengujian Sensor Keypad 51
4.6 Pengujian Rangkaian Driver Motor Stepper 54
BAB 5 Kesimpulan dan Saran 58
5.1 Kesimpulan 58
5.2 Saran 59
Daftar Pustaka 60
LAMPIRAN : 1. Program
2. Gambar Rangkaian Lengkap 3. Data Sheet
DAFTAR GAMBAR
Halaman Gambar 2.1 Susunan Pin IC Mikrokontroler AT89S51 7 Gambar 2.2 8051 Editor, Assembler, Simulator 9
Gambar 2.3 ISP – Flash Programmer 3.0a 10
Gambar 2.4 Software Desain PCB (Printed Circuit Board) Eagle 4.13r 14
Gambar 2.5 Resistor Karbon 15
Gambar 2.6 Skema Kapasitor 16
Gambar 2.7 Electrolytic Kapasitor (ELCO) 17
Gambar 2.8 Cramic Capasitor 17
Gambar 2.9 Simbol Tipe Transistor 18
Gambar 2.10 Transistor Sebagai Saklar ON 19 Gambar 2.11 Transistor Sebagai Saklar OFF 19
Gambar 2.12 Diagram Motor Stepper 21
Gambar 2.13 Pemberian Data/Pulsa Pada Motor Stepper 22 Gambar 2.14 Kontruksi Motor Stepper Bipolar 23 Gambar 2.15 Kontruksi Motor Stepper Unipolar 23
Gambar 2.16 Simbol Photodioda 25
Gambar 2.17 Rangkaian Dasar Photodioda 25
Gambar 2.18 Respon Penerimaan Sensor Infra Merah 26
Gambar 2.19 Prinsip Kerja Relay 28
Gambar 3.1 Blok Diagram Rangkaian 30
Gambar 3.2 Rangkaian Power Supplay (PSA) 31 Gambar 3.3 Rangkaian Mikrokontroler AT 89S51 32 Gambar 3.4 Rangkaian Display Seven Segment 33 Gambar 3.5 Rangkaian Pemancar Inframerah 35 Gambar 3.6 Rangkaian Penerima Sinar Inframerah 36 Gambar 3.7 Rangkaian Pengendali Motor Stepper 37
Gambar 3.8 Rangkaian Pengendali Alarm 39
Gambar 3.9 Rangkaian Keypad 40
Gambar 4.1 Rangkaian Penguji Display Seven Segment 45
Gambar 4.2 Rangkaian Penguji Relay 48
Gambar 4.3 Rangkaian Penguji Penerima Sinar Infra Merah 51
Gambar 4.4 Rangkaian Penguji Keypad 52
ABSTRAK
Di zaman sekarang ini kebanyakan orang sibuk dengan aktivitasnya diluar rumah. Sehingga lebih sering menghabiskan waktu diluar rumah dibandingkan didalam rumah. Sehingga keamanan rumah tidak lagi terjaga dengan baik. Dan dapat mengundang orang jahat untuk berbuat kriminal. Jadi untuk zaman sekarang ini sangat dibutuhkan alat/sistem untuk menjaga keamanan rumah.
Dari pengalaman diatas maka penulis membuat suatu solusi untuk membantu menjaga keamanan rumah, yaitu suatu Sistem Pengaman Rumah Digital Dengan
Menggunakan Metode Sensor Gerak dan Calling Seluler ini lebih dapat membantu
si pemilik rumah untuk menjaga rumah dari orang yang tidak dikenal. Walaupun pemilik rumah tidak ada dirumah.
BAB 1
PENDAHULUAN
1.1. Latar Belakang Masalah
Penggunaan peralatan manual sedikit demi sedikit mulai tergantikan dengan peralatan
otomatis. Selain sistem kerjanya yang sama, peralatan otomatis dapat melakukan
pekerjaannya sendiri tanpa harus dikendalikan oleh pengguna.
Penggunaan peralatan otomatis sangatlah efisien, jika menggunakan peralatan
yang manual, maka satu peralatan harus dikendalikan oleh satu orang, ini sangatlah
tidak efisien. Berbeda dengan peralatan otomatis, dimana satu orang dapat
mengendalikan beberapa peralatan otomatis sekaligus, hanya butuh waktu yang sedikit
untuk memantau peralatan tersebut, apakah bekerja dengan benar atau tidak.
Salah satu peralatan otomatis yang sudah mulai banyak digunakan adalah
Sistem pengaman rumah digital menggunkan sensor gerak dan calling seluler, sistem
pengaman rumah ini banyak digunakan di rumah rumah mewah, gedung perkantoran,
museum yang memiliki barang barang berharga.
Sistem pengaman rumah digital menggunkan sensor gerak dan calling seluler
tersebut akan mengeluarkan suara alarm apabila ada orang tidak dikenal masuk
kedalam rumah dan sistem akan memberitahukan kepada si pemilik rumah dengan cara
1.2. Rumusan Masalah
Berdasarkan uraian yang terdapat dalam latar belakang di atas, maka dalam tugas akhir
ini akan dibuat sebuah Sistem pengaman rumah digital menggunkan sensor gerak dan
calling seluler tersebut akan mengeluarkan suara alarm apabila ada orang tidak dikenal
masuk kedalam rumah dan sistem akan memberitahukan kepada si pemilik rumah
dengan cara calling seluler.
Pada alat ini akan digunakan sebuah mikrokontroler AT89S51, 1 buah motor.
Mikrokontroler AT89S51 sebagai otak dari system yang berfungsi menerima sinyal
dari sensor.
1.3 Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah
1. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga
(D-III) Fisika Instrumentasi FMIPA Universitas Sumatera Utara.
2. Membuat sebuah Sistem pengaman rumah digital menggunkan sensor
gerak dan calling seluler, yang bertujuan untuk pengamanan rumah dari
orang asing yang masuk.
3. Untuk mengaplikasikan ilmu pengetahuan yang diperoleh dari perkuliahan
1.4 Batasan Masalah
Penulisan tugas akhir ini dibatasi pada:
1. Studi cara kerja rangkaian yang meliputi diagram blok dan menguraikan
secara umum fungsi dari masing-masing komponen utama dalam blok
tersebut
2. motor steper merupakan suatu alat untuk menggerakan minuman kaleng
tersebut secara outomatis.
3. Mikrokontroler yang digunakan yaitu AT89S51, jadi hanya mikrokontroler
ini yang akan diuaraikan cara kerjanya dan cara pemrogramannya.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika
pembahasan bagaimana sebenarnya prinsip kerja dari Sistem pengaman rumah digital
menggunakan sensor gerak dan calling seluler, maka penulis menulis laporan ini
sebagai berikut:
BAB I. PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah,
BAB II. LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan
untuk pembahasan dan cara kerja dari rangkaian Teori pendukung itu antara lain
tentang mikrokontroler AT89S51 (hardware dan software), bahasa program yang
digunakan, serta cara kerja dari pemancar infra merah, cara kerja potodioda dan
rangkaian penerimanya.
BAB III. ANALISA RANGKAIAN DAN KERJA SISTEM
Analisa rangkaian dan sistem kerja, dalam bab ini dibahas tentang sistem kerja per-blok
diagram dan sistem kerja keseluruhan.
BAB IV PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas pengujian rangkaian dan sistem kerja alat, penjelasan
mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan
mengenai program yang diisikan ke mikrokontroler AT89S51.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang
dan dikembangkan perakitannya pada suatu metode lain yang mempunyai sistem kerja
yang sama.
BAB 2
LANDASAN TEORI
2.1. Perangkat Keras
Dalam merancang sebuah peralatan yang cerdas, diperlukan suatu perangkat keras
(hardware) yang dapat mengolah data, menghitung, mengingat dan mengambil pilihan.
Mikrokontroler merupakan salah satu jawabannya. Vendor dari mikrokontroler ini ada
beberapa macam, diantaranya yang paling terkenal adalah Atmel, Motorola dan
Siemens. Selain mengunakan mikrokontroler juga digunakan ADC 0804 sebagai
pengkonversi besaran analog menjadi besaran digital dan sensor SHARP GP2D12.
2.1.1 Mikrokontroler
Dalam merancang aplikasi elektronika digital dibutuhkan sebuah alat/komponen yang
dapat menghitung, mengingat, dan mengambil pilihan dan digunakan sebagai otaknya.
Kemampuan ini dimiliki oleh sebuah komputer, namun tidaklah efisien jika harus
menggunakan komputer hanya untuk keperluan tersebut. Untuk itu komputer dapat
digantikan dengan sebuah mikrokontroler. Mikrokontroler sebenarnya adalah
instrumentasi sederhana. Mikrokontroler seri MCS-51 termasuk sederhana, murah dan
mudah didapat dipasaran. Salah satu mikrokontroler seri MCS-51 adalah
mikrokontroler AT89S51.
2.1.2 Mikrokontroler AT89S51
Mikrokontroler AT89S51 adalah mikrokontroler keluaran ATMEL.Inc. Mikrokontroler
ini kompatibel dengan keluaran mikrokontroler 80C51. Mikrokontroller AT89S51
terdiri dari 40 pin dan sudah memiliki memory flash didalamnya, sehingga sangat
praktis untuk digunakan. Beberapa kemampuan (fitur) yang dimiliki adalah sebagai
berikut :
• Memiliki 4K Flash EPROM yang digunakan untuk menyimpan program. Flash EPROM(Erasable Programmable Read Only Memory) dapat ditulis dan
dihapus sebanyak 1000 kali (menurut manual).
• Memiliki internal RAM 128 byte.
RAM (Random Access Memory), suatu memori yang datanya akan hilang bila
catu padam, diakses secara random, tidak sekuensial, artinya dialamat mana
saja dapat dicapai secara langsung dengan cepat.
• 4 buah 8-bit I/O (Input/Output) port
Port ini berfungsi sebagai terminal input dan output. Selain itu, dapat
digunakan sebagai terminal komunikasi paralel, serta komunikasi serial (pin10
dan 11).
• Dua buah timer/counter 16 bit.
• Tegangan operasi dinamis dari 2,7 volt hingga 6 volt. • Operasi clock dari 0 hingga 24 MHz
• Menangani 6 sumber interupsi.
• Ada kemampuan Idle mode dan Down mode
Berikut adalah gambar susunan pin pada Mikrokontroller AT89S51:
1
Gambar 2.1 Susunan Pin IC Mikrokontroller AT89S51
Keterangan fungsi-fungsi masing-masing pin adalah sebagai berikut :
Pin 40 Vcc, Masukan catu daya +5 volt DC
Pin 20 Gnd, Masukan catu daya 0 volt DC
Pin 32-39 P0.0-P0.7, Port input/output delapan bit dua arah yang juga
dapat berfungsi sebagai bus data dan bus alamat bila
mikrokontroler menggunakan memori luar (eksternal).
Pin 1-8 P1.0-P1.7, Port input/output dua arah delapan bit dengan internal
pull up.
Pin 10-17 P3.0-P3.7Port input/output delapan bit dua arah, selain itu Port 3
RXD (pin 10) Port komunikasi input serial
TXD (pin 11) Port komuikasi output serial
INT0 (pin 12) Saluran Interupsi eksternal 0 (aktif rendah)
INT1 (pin 13) Saluran Interupsi eksternal 1 (aktif rendah)
T0 (pin 14) Input Timer 0
T1 (pin 15) Input Timer 1
WR (pin 16) Berfungsi sebagai sinyal kendali tulis, saat
prosesor akan menulis data ke memori I/O
luar.
RD (pin 17) Berfungsi sebagai sinyal kendali baca, saat
prosesor akan membaca data dari memori I/O
luar.
Pin 9 RESET, Pin yang berfungsi untuk mereset mikrokontroller
AT89S51 ke keadaan awal.
Pin 30 ALE (Address Latch Enable), berfungsi menahan sementara
alamat byte rendah pada proses pengalamatan ke memori
eksternal.
Pin 29 PSEN (Program Store Enable), Sinyal pengontrol yang berfungsi
untuk membaca program dari memori eksternal.
Pin 31 EA, Pin untuk pilihan program, menggunakan program internal
atau eksternal. Bila ‘0’, maka digunakan program eksternal.
Pin 19 X1, Masukan ke rangkaian osilator internal. Sumber osilator
Pin 18 X2, Masukan ke rangkaian osilator internal, koneksi quartz
crystal atau tidak dikoneksikan apabila digunakan eksternal
osilator.
2.2 Perangkat Lunak
Perangkat lunak (software) adalah seperangkat intruksi yang disusun menjadi sebuah
program untuk memerintahkan microcomputer melakukan suatu pekerjaan.
Dalam merancang suatu program mikrokontroler dibutuhkan suatu software yang dapat
menulis program dan mengubahnya menjadi bilangan heksadesimal. Untuk menulis
program dapat digunakan Software 8051 Editor, Assembler, Simulator (IDE). Untuk
men-download program heksadesimal ke dalam mikrokontroler dapat digunakan
Software Downloader (ISP – Flash Programmer 3.0a). untuk mendesain skematik dan
layout PCB dapat digunakan Software EAGLE 4.16r.
2.2.1 Software 8051 Editor, Assembler, Simulator
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah
Gambar 2.2 8051 Editor, Assembler, Simulator
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble
(di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika
masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan
perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu
sampai tidak ada pesan kesalahan lagi.
Software 8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke dalam
bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an.
Bilangan heksadesimal inilah yang akan dikirimkan ke mikrokontroller.
2.2.2 Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan
software ISP- Flash Programmer 3.0a yang dapat didownload dari internet.
Tampilannya seperti gambar di bawah ini
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil
file heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk mengisikan
hasil kompilasi tersebut ke mikrokontroller.
Instruksi Transfer Data
Instruksi transfer data terbagi menjadi dua kelas operasi sebagai berikut :
• Transfer data umum ( General Purpose Transfer ), yaitu : MOV, PUSH
dan POP.
• Transfer spedifik akumulator ( Accumulator Specific Transfer ), yaitu :
XCH, XCHD, dan MOVC.
Instruksi transfer data adalah intruksi pemindahan /pertukaran data antara operand
sumber dengan operand tujuan. Operand-nya dapat berupa register, memori atau lokasi
suatu memori. Penjelasan instruksi transfer data tersebut dapat dijelaskan sebagai
berikut.
MOV : Transfer data dari Register satu ke Register yang lainnya, antara Register
dengan Memory.
PUSH : Transfer byte atau dari operand sumber ke suatu lokasi dalam stack yang
alamatnya ditunjuk oleh register penunjuk.
POP : Transfer byte atau dari dalam stack ke operand tujuan.
XCH : Pertukaran data antara operand akumulator dengan operand
sumber.
XCHD : Pertukaran nibble orde rendah antara RAM internal ( lokasinya
Instruksi Aritmatik
Operasi dasar aritmatik seperti penjumlahan, pengurangan, perkalian dan pembagian
dimiliki oleh AT89S51 dengan mnemonic : INC, ADD, SUBB, DEC, MUL dan DIV.
Penjelasan dari operasi mnemonic tersebut dijelaskan sebagai berikut :
INC : Menambah satu isi sumber operand dan menyimpan hasilnya ke operand
tersebut
ADD : Penjumlahan antara akumulator dengan sumber operand dan hasilnya
disimpan di akumulator
SUBB : Pengurangan akumulator dengan sumber operand, hasilnya disimpan
dalam operand tersebut.
DEC : Mengurangi sumber operand dengan 1. dan hasilnya disimpan pada
operand tersebut.
MUL : Perkalian antara akumulator dengan Register B.
DIV : Pembagian antara akumulator dengan Register B dan hasilnya disimpan
dalam akumulator, sisanya di Register B.
Instruksi Logika
Mikrokontroller AT89S51 dapat melakukan operasi logika bit maupun operasi logika
byte. Operasi logika tersebut dibagi atas dua bagian yaitu :
• Operasi logika operand tunggal, yang terdiri dari CLR, SETB, CPL, RL, RR,
dan SWAP.
• Operasi logika dua operand seperti : ANL, ORL, dan XRL.
Operasi yang dilkukan oleh AT89S51 dengan pembacaan instruksi logika tersebut
dijelaskan dibawah ini :
CLR : Menghapus byte atau bit menjadi nol.
CPL : Mengkomplemenkan akumulator.
RL : Rotasi akumulator 1 bit ke kiri.
RR : Rotasi akumulator ke kanan.
SWAP : Pertukaran nibble orde tinggi.
Instruksi Transfer Kendali
Instruksi transfer kendali (control transfer) terdiri dari (3) tiga kelas operasi yaitu :
• Lompatan tidak bersyarat ( Unconditional Jump ) seperti : ACALL, AJMP,
LJMP,SJMP
• Lompatan bersyarat ( Conditional Jump ) seperti : JZ, JNZ, JB, CJNE, dan
DJNZ.
• Insterupsi seperti : RET dan RET1.
Penjelasan dari instruksi diatas sebagai berikut :
ACALL : Instruksi pemanggilan subroutine bila alamat subroutine tidak
lebih dari 2 Kbyte.
LCALL : Pemanggilan subroutine yang mempunyai alamat antara 2 Kbyte –
64 Kbyte.
AJMP : Lompatan untuk percabangan maksimum 2 Kbyte.
LJMP : Lompatan untuk percabangan maksimum 64 Kbyte.
JNB : Percabangan bila bit tidak diset.
JZ : Percabangan akan dilakukan jika akumulator adalah nol.
JNZ : Percabangan akan dilakukan jika akumulator adalah tidak nol.
CJNE : Operasi perbandingan operand pertama dengan operand kedua,
jika tidak sama akan dilakukan percabangan.
DJNZ : Mengurangi nilai operand sumber dan percabangan akan
dilakukan apabila isi operand tersebut tidak nol.
RET : Kembali ke subroutine.
RET1 : Kembali ke program interupsi utama.
2.2.3. Software Desain PCB (Printed Circuit Board) Eagle 4.13r
Untuk mendesain PCB dapat digunakan software EAGLE 4.13r yang dapat
di-download di internet secara gratis. Tampilan software EAGLE 4.13r dapat dilihat pada
gambar 2.4. di bawah ini :
Gambar 2.4. Software Desain PCB (Printed Circuit Board) Eagle 4.13r
Cara menggunakan software ini terlebih dahulu yang dikerjakan adalah
dan mendesain tata letak komponen sesuai keinginan tetapi harus sesuai jalur
rangkaiannya agar rangkaian dapat berfungsi sesuai dengan skematiknya.
Setelah selesai di desain layout PCBnya, barulah siap di-print dan di-transfer ke
PCB. Pada proses pentransferan layout PCB ke PCB dapat digunakan kertas Transfer
Paper.
2.3 Komponen – Komponen Pendukung
2.3.1 Resistor
Resistor komponen pasif elektronika yang berfungsi untuk membatasi arus listrik yang
mengalir. Berdasarkan kelasnya resistor dibagi menjadi 2 yaitu : Fixed Resistor dan
Variable R esistor Dan umumnya terbuat dari carbon film atau metal film, tetapi tidak
menutup kemungkinan untuk dibuat dari material yang lain.
Pada dasarnya semua bahan memiliki sifat resistif namun beberapa bahan
tembaga perak emas dan bahan metal umumnya memiliki resistansi yang sangat kecil.
Bahan–bahan tersebut menghantar arus listrik dengan baik, sehingga dinamakan
konduktor. Kebalikan dari bahan yang konduktif, bahan material seperti karet, gelas,
karbon memiliki resistansi yang lebih besar menahan aliran elektron dan disebut
sebagai insulator seperti ditunjukkan pada gambar 2.5 berikut :
2.3.2 Kapasitor
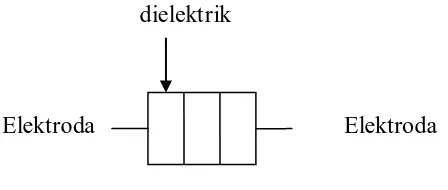
Kapasitor adalah komponen elektronika yang dapat menyimpan muatan listrik. Struktur
sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan
dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum,
keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka
muatan-muatan positif akan mengumpul pada salah satu kaki elektroda metalnya dan
pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu
lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknya
muatan negatif tidak bisa menuju ke ujung kutup positif karena terpisah oleh bahan
elektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada
konduktif pada ujung-ujung kakinya. Di alam bebas phenomena kapasitor terjadi pada
saat terkumpulnya muatan-muatan positif dan negatif diawan. Skema kapasitor dapat
dilihat pada gambar 2.6 dibawah ini.
dielektrik
Elektroda Elektroda
Gambar 2.6 Skema Kapasitor.
Kapasitor merupakan komponen pasif elektronika yang sering dipakai didalam
merancang suatu sistem yang berfungsi untuk mengeblok arus DC, Filter, dan
penyimpan energi listrik. Didalamnya 2 buah pelat elektroda yang saling berhadapan
dan dipisahkan oleh sebuah insulator. Sedangkan bahan yang digunakan sebagai
listrik disimpan pada tiap elektrodanya. Selama kapasitor melakukan pengisian, arus
mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang
membedakan tiap-tiap kapasitor adalah dielektriknya. Berikut ini adalah jenis– jenis
kapasitor yang dipergunakan dalam perancangan ini. Seperti ditunjukkan pada gambar
2.7 dan 2.8 berikut :
Gambar 2.7. Gambar 2.8.
Electrolytic Capacitor (ELCO) Ceramic Capacitor
2.3.3 Transistor
Transistor adalah komponen elektronika yang mempunyai tiga buah terminal. Terminal
itu disebut emitor, basis, dan kolektor. Transistor seakan-akan dibentuk dari
penggabungan dua buah dioda. Dioda satu dengan yang lain saling digabungkan
dengan cara menyambungkan salah satu sisi dioda yang senama. Dengan cara
penggabungan seperti dapat diperoleh dua buah dioda sehingga menghasilkan transistor
Bahan mentah yang digunakan untuk menghasilkan bahan N dan bahan P adalah
silikon dan germanium. Oleh karena itu, dikatakan :
1. Transistor germanium PNP
2. Transistor silikon NPN
3. Transistor silikon PNP
4. Transistor germanium NPN
Semua komponen di dalam rangkaian transistor dengan simbol anak panah yang
terdapat di dalam simbol menunjukkan arah yang melalui transistor.
Gambar 2.9. Simbol tipe transistor
Keterangan :
C = kolektor
E = emiter
B = basis
Transistor sebagai saklar.
Didalam pemakaiannya transistor dipakai sebagai komponen saklar (switching) dengan
memanfaatkan daerah penjenuhan (saturasi) dan daerah penyumbatan (cut off) yang
ada pada karakteristik transistor. Pada daerah penjenuhan nilai resistansi persambungan
kolektor emiter secara ideal sama dengan nol atau kolektor dan emiter terhubung
langsung (short). Keadaan ini menyebabkan tegangan kolektor emiter (VCE) = 0 Volt C
B
E
C
B
E
pada keadaan ideal, tetapi pada kenyataannya VCE bernilai 0 sampai 0,3 Volt. Dengan
menganalogikan transistor sebagai saklar, transistor tersebut dalam keadaan on seperti
pada gambar di bawah ini :
Gambar 2.10. Transistor sebagai Saklar ON
Pada daerah penyumbatan, nilai resistansi persambungan kolektor emiter secara ideal
sama dengan tak terhitung atau terminal kolektor dan emiter terbuka (open). Keadaan
ini menyebabkan tegangan (VCB) sama dengan tegangan sumber (Vcc), tetapi pada
kenyataannya Vcc pada saat ini kurang dari Vcc karena terdapat arus bocor dari
kolektor ke emiter. Dengan menganalogikan transistor sebagai saklar, transistor
tersebut dalam keadaan off seperti gambar dibawah ini.
Saklar Off Vcc
Vcc
IC R
RB
VB
IB VBE
VCE
Saklar On Vcc
Vcc
IC R
RB
VB
IB VBE
Gambar 2.11. Transistor Sebagai Saklar OFF
2.4 Motor Langkah (Stepper)
Motor langkah ( Motor Stepper ) banyak digunakan dalam berbagai aplikasi,
dipergunakan apabila dikehendaki jumlah putaran yang tepat atau di perlukan sebagian
dari putaran motor. Suatu contoh dapat di jumpai pada disk drive, untuk proses
pembacaan dan/atau penulisan data ke/dari cakram(disk), head baca-tulis ditempatkan
pada tempat yang tepat di atas jalur atau track pada cakram, untuk head tersebut di
hubungkan dengan sebuah motor langkah.
Aplikasi penggunaan motor langkah dapat juga di jumpai dalam bidang industri
atau untuk jenis motor langkah kecil dapat di gunakan dalam perancangan suatu alat
mekatronik atau robot. Motor langkah berukuran besar digunakan, misalnya, dalam
proses pengeboran logam yang menghendaki ketepatan posisi pengeboran, dalam hal
ini di lakukan oleh sebuah robot yang memerlukan ketepatan posisi dalam gerakan
lengannya dan lain-lain.
Pada dasarnya prinsip kerja motor stepper sama dengan motor DC, yaitu
membangkitkan medan magnet untuk memperoleh gaya tarik ataupun gaya tolak
menolak dengan menggunakan catu tegangan DC pada lilitan/kumparannya. Motor
stepper menggunakan gaya tarik untuk menarik fisik kutub magnet yang berlawanan
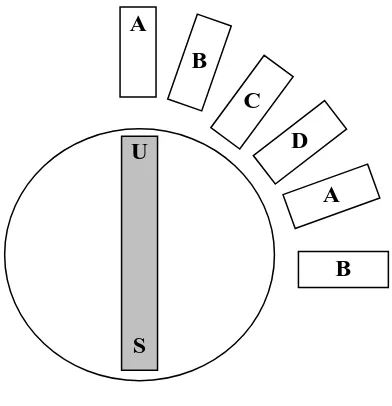
Pada gambar di bawah ditunjukkan dasar susunan sebuah motor langkah (stepper).
Gambar 2.12. Diagram Motor Stepper
Magnet permanen N-S berputar kearah medan magnet yang aktif. Apabila
kumparan stator dialiri arus sedemikian rupa, maka akan timbul medan magnet dan
rotor akan berputar mengikuti medan magnet tersebut.setiap pengalihan arus ke
kumparan berikutnya menyebabkan medan magnet berputar berputar menurut suatu
sudut tertentu, biasanya informasi besar sudut putar tertulis pada badan motor langkah
yang bersangkutan. Jumlah keseluruhan pengalihan menentukan sudut perputaran
motor. Jika pengalihan arus di tentukan, maka rotor akan berhenti pada posisi terakhir.
A
D B
A C
B U
Jika kecepatan pengalihan tidak terlalu tinggi, maka slip akan dapat dihindari. Sehingga
tidak di perlukan umpan balik (feedback) pada pengendalian motor langkah.
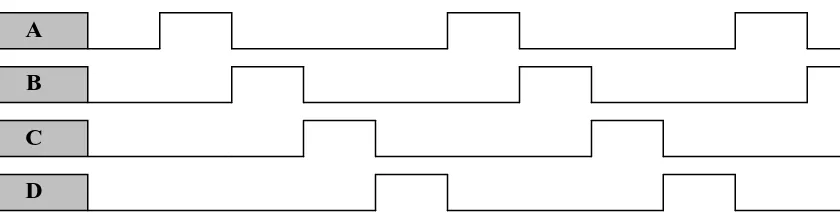
Motor langkah yang akan di gunakan memiliki 4 fase (pole atau kutub),
pengiriman pulsa dari mikrokontroler ke rangkaian motor langkah dilakukan secara
bergantian, masing-masing 4 data (sesuai dengan jumlah phase-nya), sebagian di
tunjukkan pada gambar di bawah ini.
Gambar .2.13. Pemberian Data / Pulsa pada Motor Stepper
Pada saat yang sama ,untuk tiap motor langkah, tidak boleh ada 2 (dua)
masukan atau lebih yang mengandung pulsa sama dengan 1 (high), atau dengan kata
lain, pada suatu saat hanya sebuah masukan yang bernilai 1 (satu) sedangkan lainnya
bernilai 0 (nol).
Dilihat dari lilitannya motor stepper terbagi menjadi 2 jenis yaitu :
a. Motor Stepper Bipolar
b. Motor Stepper Unipolar
Perbedaan antara Motor stepper bipolar dan Motor stepper unipolar adalah:
a. Pada motor stepper bipolar memiliki empat kabel masukan. Namun untuk
menggerakan motor stepper tipe ini lebih rumit jika dibandingkan dengan
menggerakan motor stepper tipe unipolar. Sebagai gambaran dapat dilihat
konstruksi motor stepper bipolar pada gambar dibawah ini :
Gambar 2.14. Konstruksi Motor Stepper Bipolar
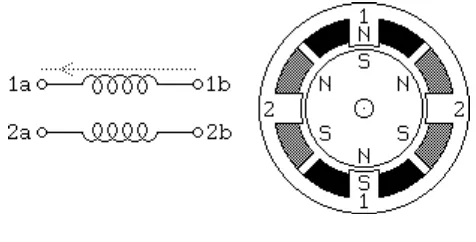
b. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center
tap dari masing masing lilitan ada yang berupa kabel terpisah sudah terhubung
didalamnya sehingga center tap yang keluar hanya satu kabel. Center tap dari
motor stepper dapat dihubungkan ke ground atau dapat juga yang
menghubungkannya ke +Vcc, tergantung pada driver yang digunakan. Sebagai
gambaran dapat dilihat konstruksi motor stepper unipolar pada gambar dibawah
ini:
2.5 Photodioda
Photodioda sejenis dengan dioda pada umumnya. Perbedaan pokok pada photodioda
ini adalah dipasangnya sebuah lensa pemfokus sinar. Lensa ini berfungsi untuk
memfokuskan sinar jatuh pada pertemuan pn. Konduktivitas dioda ditentukan
langsung oleh cahaya yang jatuh padanya. Energi pancaran cahaya yang jatuh pada
pertemuan pn menyebabkan sebuah elektron berpindah ke tingkat energi yang lebih
tinggi. Elektron berpindah ke luar dari valensi band meninggalkan "hole" sehingga
membangkitkan pasangan elektron bebas dan hole. Gambar 2.9 menunjukkan simbol
photodiode.
Rangkaian dasar photodioda ditunjukkan dengan gambar 2.10 Photodioda
dihubungkan seri dengan sebuah R dan dicatu dengan cumber tegangan DC. Arus
balik akan bertambah besar bila sebuah cahaya jatuh pada pertemuan pn photodioda
dan arus balik(Iλ) akan menjadi sangat kecil bila pada pertemuan pn photodioda tidak terdapat cahaya yang jatuh padanya. Arus yang mengalir pada kondisi gelap disebut
"dark current" sedangkan resistansinya ditentukan dengan hukum Ohm sebagai
berikut:
R
R =
V R
I
Gambar 2.16. Gambar 2.17.
Simbol Photodioda Rangkaian dasar Photodioda.
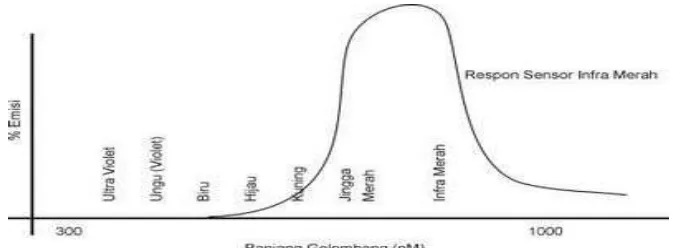
Sinar infra merah yang dipancarkan oleh pemancar infra merah tentunya
mempunyai aturan tertentu agar data yang dipancarkan dapat diterima dengan baik di
receiver. Oleh karena itu baik di transmitter infra merah maupun receiver infra merah
harus mempunyai aturan yang sama dalam mentransmisikan (bagian transmitter) dan
menerima sinyal tersebut kemudian mendekodekannya kembali menjadi data biner
(bagian receiver).
Komponen yang dapat menerima infra merah ini merupakan komponen yang peka
cahaya yang dapat berupa dioda (photodioda) atau transistor (phototransistor).
Komponen ini akan merubah energi cahaya, dalam hal ini energi cahaya infra merah,
menjadi pulsa-pulsa sinyal listrik. Komponen ini harus mampu mengumpulkan sinyal
infra merah sebanyak mungkin sehingga pulsa-pulsa sinyal listrik yang dihasilkan
kualitasnya cukup baik. Semakin besar intensitas infra merah yang diterima maka
sinyal pulsa listrik yang dihasilkan akan baik jika sinyal infra merah yang diterima
(light collector) yang cukup baik dan sinyal pulsa yang dihasilkan oleh sensor infra
merah ini harus dikuatkan. Pada prakteknya sinyal infra merah yang diterima
intensitasnya sangat kecil sehingga perlu dikuatkan. Selain itu agar tidak terganggu
oleh sinyal cahaya lain maka sinyal listrik yang dihasilkan oleh sensor infra merah
harus difilter pada frekeunsi sinyal carrier yaitu pada 30KHz sampai 40KHz.
Selanjutnya baik photodioda maupun phototransistor disebut sebagai photodetector.
Dalam penerimaan infra merah, sinyal ini merupakan sinyal infra merah yang
termodulasi. Pemodulasian sinyal data dengan sinyal carrier dengan frekuensi tertentu
akan dapat memperjauh trasnmisi data sinyal infra.
Gambar 2.18. Respon Penerimaan Sensor Infra Merah
Komponen photodetector mempunyai karakteristik seperti komponen yang dinamakan
‘solar cell’, yang merubah energi cahaya menjadi energi listrik. Jika photo detector ini
mendapat cahaya maka akan menghasilkan tegangan sekitar 0.5 volt dan arus yang
dihasilkan tergantung dari intensitas cahaya yang masuk pada photo detector tersebut.
Teknik ini biasa disebut sebagai ‘unbiased current sourcing’ atau ‘photovolataic
mode’. Teknik ini jarang digunakan karena tidak efisien dan mempunyai respon yang
Konfigurasi photo detector yang umum dipakai adalah teknik yang dikenal
sebagai ‘reserved biased’ atau ‘photoconductive mode’. Pada mode reverse bias/bias
terbalik, photo detector dibias dengan tegangan external mulai dari beberapa volt
sampai sekitar 50 volt (tergantung karakteristik photo detector). Jika karakteristik
photodetector tidak diketahui maka bias tegangan dapat diberi 12V agar tidak merusak
photodetector tersebut.
Ketika photo detector ini mendapat cahaya, dalam hal ini cahaya infra merah
maka terdapat arus bocor yang relatif kecil. Besar-kecilnya arus bocor ini tergantung
dari intensitas cahaya infra merah yang mengenai photodetector tersebut.
Sebuah photodioda, biasanya mempunyai karakteristik yang lebih baik daripada
phototransistor dalam responya terhadap cahaya infra merah. Biasanya photo dioda
mempunyai respon 100 kali lebih cepat daripada phototransistor. Oleh sebab itulah para
designer cenderung menggunakan photodioda daripada menggunakan phototransistor.
Tetapi sebuah phototransistor tetap mempunyai keunggulan yaitu mempunyai
kemampuan untuk menguatkan arus bocor menjadi ratusan kali jika dibandingkan
dengan photodioda.
Respond time dari suatu dioda infra merah (penerima) mempunyai waktu respon
yang biasanya dalam satuan nano detik. Respond time ini mendefinisikan lama agar
dioda penerima infra merah merespon cahaya infra merah yang datang pada area
penerima. Sebuah dioda penerima infra merah yang baik paling itdak mempunyai
respond time sebesar 500 nano detik atau kurang. Jika respond time terlalu besar maka
dioda infra merah ini tidak dapat merespon sinyal cahaya yang dimodulasi dengan
sinyal carrier frekuensi tinggi dengan baik. Hal ini akan mengakibatkan adanya data
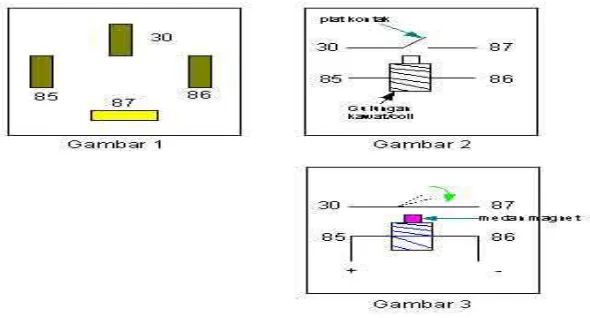
2.6 Relay
Relay adalah dimana ada sebuah koil elektronika dan dua buah switch Normally Open
dan Normally Close. Yang dimana jika sebuah koil diberi arus atau tegangan, maka
akan terjadi medan magnet yang menyebabkan posisi awal/normally close tertarik
menjadi terbuka(normally open) dan begitu juga sebaliknya pada normally open akan
tertarik menjadi tertutup (normally close).
Gambar 2.19. Prinsip Kerja Relay
Di dalam relay Terdapat :
1. Gulungan kawat tembaga (coil) dengan ujung2 kawat diberi nomer 85 dan 86
2. Mekanisme saklar seperti gambar kawat terputus dengan ujung2 nya diberi
nomer 30 dan 87
Gulungan atau coil digunakan untuk menciptakan medan magnet pada inti besi coil,
jika 85 diberi arus + dan 86 diberi arus - atau sebaliknya maka akan tercipta medan
magnet pada ujung inti besi coil itu. Jika medan magnet sudah terbentuk (gambar 3)
magnet, sehingga mekanisme saklar yang tadinya terbuka / terputus menjadi tertutup/
menyambung, sehingga 30 dan 87 menjadi satu kesatuan seolah2 seperti seutas kawat/
seperti saklar yang sedang di aktifkan. Membuka dan menutupnya 30 dan 87 inilah
BAB 3
PERANCANGAN ALAT DAN CARA KERJA
3.1 Diagram Blok Rangkaian
Secara garis besar alat ini terdiri dari 8 blok utama, yaitu rangkaian H-Bridge, Display,
Tombol (Tombol open, close, close2,dan reset), keypad, rangkaian sensor, alarm dan
hp. Diagram blok dari alat ini ditunjukkan oleh gambar 3.1 berikut ini
Gambar 3.1. Blok Diagram Rangkaian
M
ikr
okont
rol
er
A
T
89S
51
H-Bridge
Keypad
Rangkaian Sensor
Alarm
Hp Tombol
3.1.1 Perancangan Power Supplay (PSA)
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada.
Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran
5 volt digunakan untuk mensupplay tegangan ke seluruh rangkaian. Rangkaian power
supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2. Rangkaian Power Supplay (PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan
tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
disearahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DC akan
diratakan oleh kapasitor 2200 μF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan
masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP
TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada
rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika
rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari
3.1.2 Rangkaian Mikrokontroler AT89S51
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Rangkaian
mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.3. Rangkaian Mikrokontroller AT89S51
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena
mikrokontroller AT89S51. tidak menggunakan memori eskternal. Pin 18 dan 19
dihubungkan ke XTAL 12 MHz dan capasitor 33 pF. XTAL ini akan mempengaruhi
kecepatan mikrokontroller AT89S51. dalam mengeksekusi setiap perintah dalam
program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke
tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang
merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai
eksternal. Pada port 0 ini masing masing pin dihubungkan dengan resistor 4k7 ohm.
Resistor 4k7 ohm yang dihubungkan ke port 0 befungsi sebagai pull up( penaik
tegangan ). Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10
sampai 17 adalah port 3.. Pin 20 merupakan ground dihubungkan dengan ground pada
power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5
volt dari power supplay.
3.1.3 Rangkaian Display seven segment
Untuk menampilkan jumlah orang yang masuk ke dalam ruangan diperlukan suatu
rangkaian display yang dapat menampilkan jumlah orang yang masuk ke dalam
ruangan tersebut
Rangkaian display yang digunakan untuk menampilkan jumlah orang yang masuk ke
dalam ruangan terlihat pada ganbar berikut:
Display ini menggunakan 3 buah seven segment yang dihubungkan ke IC HEF
4094BP yang merupakan IC serial to paralel. IC ini akan merubah 8 bit data serial yang
masuk menjadi keluaran 8 bit data paralel. Rangkaian ini dihubungkan dengan P3.0 dan
P3.1 AT89S51. P3.0 merupakan fasilitas khusus pengiriman data serial yang
disediakan oleh mikrokontroler AT89S51. Sedangkan P3.1 merupakan sinyal clock
untuk pengiriman data serial. Pada rangkaian display ini digunakan dua buah dioda
yang berfungsi untuk menurunkan tegangan supply untuk seven segment. Satu buah
dioda dapat menurunkan tegangan sekitar 0,6 volt. Jadi, apabila dioda yang digunakan
dua buah maka tegangan yang dapat diturunkannya adalah 1,8 volt. Tegangan ini
diturunkan agar umur seven segment lebih tahan lama dan karena tegangan maksimum
seven segment adalah 3,7 volt.
3.1.4 Rangkaian Sensor
Untuk dapat mendeteksi orang yang lewat, maka alat dilengkapi dengan 2 buah sensor.
Ke-2 sensor ini mempunyai rangkaian yang sama, hanya penempatannya saja yang
berbeda.
Masing-masing sensor dinding menggunakan 2 buah pemancar infra merah dan sebuah
potodioda. Sensor ini memanfaatkan pantulan dari pemancar infra merah yang diterima
oleh potodioda. Digunakan 2 buah pemancar infra merah pada masing-masing sensor
bertujuan agar sinyal pantulan semakin kuat, sehingga sensor benar benar dapat
mendeteksi orang yang melewatinya. jika tidak ada orang yang melewati sensor, maka
pancaran sinar infra merah tidak mengenai potodioda. Perbedaan intensitas pantulan
Setiap pantulan yang diterima oleh potodioda akan diolah dan dijadikan data
digital, sehingga bila potodioda mendapatkan pantulan dari pemancar infra merah,
maka akan mengirimkan sinyal low ke mikrokontrolert AT89S51. Dengan demikian
mikrokontroler dapat mendeteksi sensor yang mengirimkan sinyal low dan mengambil
tindakan untuk menampilkan jumlah orang yang masuk ke dalam ruangan.
Rangkaian pemancar infra merah tampak seperti gambar di bawah ini:
Gambar 3.5. Rangkaian Pemancar infra merah
Pada rangkaian di atas digunakan 2 buah LED infra merah yang diparalelkan, dengan
demikian maka intensitas yang dipancarkan oleh infra merah semakin kuat, karena
merupakan gabungan dari buah LED infra merah. Resistor yang digunakan adalah 100
ohm sehingga arus yang mengalir pada masing-masing LED infra merah adalah
sebesar: 5 0, 05 50
100
V
i A atau mA
R
= = =
Dengan besarnya arus yang mengalir ke LED infra merah, maka intensitas pancaran
infra merah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin
jauh.
Pantulan dari sinar infra merah akan diterima oleh fotodioda, kemudian akan
diolah oleh rangkaian penerima agar menghasilkan sinyal tertentu, dimana jika
ini akan mengeluarkan logika low (0), namun jika fotodioda tidak menerima pantulan
sinar infra merah, maka output dari rangkaian
penerima akan mengeluarkan logika high (1). Rangkaian penerima infra merah seperti
gambar di bawah ini:
Gambar 3.6. Rangkaian Penerima sinar infra merah
3.1.5 Rangkaian Pengendali Motor Stepper
Motor stepper digunakan agar dapat mebuka dan menutup pintu secara otomatis pada
aplikasi yang dirancang. Dan Untuk mengendalikan perputaran motor stepper
dibutuhkan sebuah driver. Driver ini berfungsi untuk memutar motor stepper searah
dengan jarum jam atau berlawanan arah dengan jarum jam. Rangkaian ini dihubungkan
ke port 0 dari mikrokontroler AT89S51. sehingga untuk memutar motor, harus
diberikan logika high secara bergantian ke port 0. Sedangkan untuk memutar motor ke
arah sebaliknya, maka logika high yang diberikan secara bergantian tersebut harus
berlawanan arah dengan sebelumnya. Dengan demikian maka pergerakan motor
Gambar 3.7. Rangkaian Pengendali Motor Stepper
Rangkaian driver motor stepper ini terdiri dari empat masukan, dimana
masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan keluarannya
dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor stepper jika
diberi sinyal high (1) secara bergantian pada ke-4 masukannya.
Rangkaian ini terdairi dari 2 buah transistor NPN TIP 122 dan 2 buah transistor
PNP TIP 127. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3
pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10
Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan
kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan
sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122
mendapat tegangan 5 volt, maka transistor akan aktip. Hal ini akan menyebabkan
terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt
dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke
akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan
yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan
tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada
kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang
terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah
kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan
secara bergantian pada input dari driver motor stepper, maka motor stepper akan
berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya,
maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian
dengan arah yang berlawanan dengan sebelumnya.
3.1.6 Rangkaian Pengendali Alarm
Rangkaian pengendali relay pada alat ini berfungsi untuk memutuskan atau
menghubungkan sumber tegangan 12 volt dengan alarm. Gambar rangkaian pengendali
Gambar 3.8. Rangkaian Pengendali Alarm
Output dari relay yang satu dihubungkan ke sumber tegangan 12 volt dan yang
lainnya dihubungkan ke heater. Hubungan yang digunakan adalah normally close.
Prinsip kerja rangkaian ini pada dasarnya memanfaatkan fungsi transistor sebagai
saklar elektronik. Tegangan atau sinyal pemicu dari transistor berasal dari
mikrokontroler Port 1.0 (P1.0). Pada saat logika pada port 1.0 adalah tinggi (high),
maka transistor mendapat tegangan bias dari kaki basis. Dengan adanya tegangan bias
ini maka transistor akan aktip (saturation), sehingga adanya arus yang mengalir ke
kumparan relay. Hal ini akan menyebabkan saklar pada relay menjadi terbuka,
sehingga hubungan sumber tegangan 12 volt ke buzzer / alarm akan terhubung dan
alarm akan menyala. Begitu juga sebaliknya pada saat logika pada P1.0 adalah rendah
(low) maka relay tidak dialiri arus. Hal ini akan menyebabkan saklar pada relay
terputus, sehingga sumber tegangan 12 volt dengan alarm akan terputus dan alarm tidak
3.1.7 Perancangan rangkaian keypad
Rangkaian Keypad berfungsi sebagai tombol untuk memasukan nilai password.
Kemudian data yang diketikkan pada keypad akan diterima oleh mikrokontroler
AT89S51 untuk kemudian diolah dan diotampilkan pada display seven segmen.
Rangkaian keypad ditunjukkan pada gambar berikut ini :
Gambar 3.9. Rangkaian Keypad
Rangkaian keypad yang digunakan adalah rangkaian keypad yang telah ada
dipasaran. Keypad ini terdiri dari 12 tombol yang hubungan antara tombol-tombolnya
seperti tampak pada gambar di atas. Rangkaian ini dihubungkan ke port 2
Program diawali dengan start yang berarti rangkaian diaktifkan. Kemudian
sensor akan mendeteksi ada tidaknya orang yang masuk. Jika ada orang yang masuk
maka alarm berbunyi dan hp akan memanggil.
Masukkan password pada keypad yang ditampilkan ke display seven segment,
jika password benar maka pintu akan terbuka, namun apabila password salah maka
alarm akan berbunyi satu kali saja, tapi jika sampai tiga kali salah maka alarm akan
berbunyi terus dan hp akan memanggil.
Tombol open ditekan untuk membuka pintu dan sistem akan nonaktif. Tombol
close ditekan untuk menutup pintu dan sistem pengaman rumah akan aktif kembali.
Pada saat memasukkan password benar maka pintu akan terbuka dan sistem nonaktif,
untuk mengaktifkannya kembali maka tekan tombol close2 yang berada didalam
BAB 4
PENGUJIAN ALAT DAN PROGRAM
4.1 Pengujian Rangkaian Mikrokontroller AT89S51
Untuk mengetahui apakah rangkaian mikrokontroller AT89S51 telah bekerja dengan
baik, maka dilakukan pengujian. Pengujian bagian ini dilakukan dengan cara
menghubungkan sebuah LED ke pin P0.0 dan memberikan program sederhana pada
mikrokontroller AT89S51. Programnya adalah sebagai berikut:
Loop:
Setb P0.0
Acall tunda
Clr P0.0
Acall tunda
Sjmp Loop
Tunda:
Mov r7,#255
Tnd: Mov r6,#255
Djnz r6,$
Djnz r7,tnd
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P0.0
detik kemudian mematikannya secara terus menerus (flip – flop). Perintah Setb P0.0
akan menjadikan P0.0 berlogika high yang menyebabkan LED menyala. Acall tunda
akan menyebabkan LED ini hidup selama beberapa saat. Perintah Clr P0.0 akan
menjadikan P0.0 berlogika low yang menyebabkan LED akan mati. Perintah Acall
tunda akan menyebabkan LED ini mati selama beberapa saat. Perintah Sjmp Loop
akan menjadikan program tersebut berulang, sehingga akan tampak LED tersebut
tampak berkedip. jika program tersebut diisikan ke mikrokontroller AT89S51,
kemudian mikrokontroller dapat berjalan sesuai dengan program yang diisikan, maka
rangkaian minimum mikrokontroller AT89S51 telah bekerja dengan baik.
4.2 Pengujian Rangkaian Display Seven Segment
Pengujian pada rangkaian ini dapat dilakukan dengan menghubungkan rangkaian ini
dengan rangkaian mikrokontroler, kemudian memberikan data tertentu pada port serial
dari mikrokontroler. Seven segmen yang digunakan adalah common anoda, dimana
semen akan menyala jika diberi logika 0 dan sebaliknya segmen akan mati jika diberi
Gambar 4.1. Rangkaian Penguji Display Seven Segment
Dari hasil pengujian diperoleh data yang harus dikirimkan ke port serial untuk
Angka Data yang dikirim
1 0ECH
2 18H
3 88H
4 0C4H
5 82H
6 02H
7 0E8H
8 0h
9 80H
0 20H
Program yang diisikan pada mikrokontroler untuk menampilkan nilai-nilai
tersebut adalah sebagai berikut:
bil0 equ 20h
bil1 equ 0ech
bil2 equ 18h
bil3 equ 88h
bil4 equ 0c4h
bil5 equ 82h
bil6 equ 02h
bil7 equ 0e8h
bil8 equ 0h
bil9 equ 80h
Loop:
mov sbuf,#bil0
Clr ti
sjmp loop
Program di atas akan menampilkan angka 0 pada semua seven segment.
Sedangkan untuk menampilkan 3 digit angka yang berbeda pada seven segment adalah
dengan mengirimkan ke 3 data angka yang akan ditampilkan pada seven segment.
Programnya adalah sebagai berikut :
Loop:
mov sbuf,#bil1
Jnb ti,$
Clr ti
mov sbuf,#bil2
Jnb ti,$
Clr ti
mov sbuf,#bil3
Jnb ti,$
Clr ti
sjmp loop
Program di atas akan menampilkan angka 1 pada seven segmen ketiga, angka 2 pada seven segment kedua dan angka 3 pada seven segment pertama.
4.3 Pengujian Rangkaian Relay
Pengujian rangkaian relay dapat dilakukan dengan memberikan tegangan 5 volt dan 0
volt pada basis transistor C945. Transistor C945 merupakan transistor jenis NPN,
transistor jenis ini akan aktif jika pada basis diberi tegangan > 0,7 volt dan tidak aktif
Pada rangkaian ini relay digunakan untuk memutuskan hubungan buzzer dengan
sumber tegangan 12 volt, dimana hubungan yang digunakan adalah normally close
(NO), dengan demikian jika relay aktip maka hubungan buzzer ke sumber tegangan
akan terhubung, sebaliknya jika relay tidak aktif, maka hubungan buzzer ke sumber
tegangan akan terputus.
Pengujian dilakukan dengan memberikan tegangan 5 volt pada basis transistor,
jika relay aktif dan buzzer berbunyi, maka rangkaian ini telah berfungsi dengan baik.
Pengujian selanjutnya dilakukan dengan menghubungkan input rangkaian ini
ke mikrokontroler pada P2.2
Gambar 4.2. Rangkaian Pengujian Relay
Kemudian memberikan program sederhana pada mikrokontroler AT89S51.
Setb P0.1
...
Perintah di atas akan memberikan logika high pada P0.1, sehingga P0.1 akan
mendapatkan tegangan 5 volt. Tegangan 5 volt ini akan mengaktipkan transistor C945,
sehingga relay juga menjadi aktif dan heater menyala. Berikutnya memberikan program
sederhana untuk menonaktifkan relay. Programnya sebagai berikut:
Clr P0.1
...
Perintah di atas akan memberikan logika low pada P0.1, sehingga P0.1 akan mendapatkan tegangan 0 volt. Tegangan 0 volt ini akan menonaktifkan transistor C945, sehingga relay juga menjadi tidak aktif dan heater tidak menyala.
4.4 Pengujian Rangkaian Sensor
Fotodioda dioperasikan pada bias balik, dimana fotodioda ini akan memiliki hambatan
sekitar 15 s/d 20 Mohm jika tidak terkena sinar infra merah, dan hambatannya akan
berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar infra merah tergantung dari
besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka
hambatannya semakin kecil.
Pada gambar 4.3, output dari fotodioda diumpankan ke basis transistor tipe NPN C945,
ini berarti untuk membuat transistor tersebut saturasi maka tegangan yang keluar dari
fotodioda harus lebih besar dari 0,7 volt. Syarat ini akan terpenuhi jika fotodioda
mendapatkan sinar infra merah. Analisanya sebagai berikut:
Jika tidak ada sinar infra merah yang mengenai fotodioda, maka hambatan pada
2 330.000
R1 = Nilai hambatan minimum pada saat fotodioda tidak terkena cahaya
(15 s/d 20 MΩ)
R2 = Nilai resistor pada rangkaian
Vcc = Sumber tegangan
Vout akan diumpankan ke basis dari transistor C945, karena tegangannya hanya 0,107
Volt maka transistor tidak saturasi.
Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda
300 Kohm, sehingga:
2 330.000
R1 = Nilai hambatan maksimum pada saat fotodioda terkena cahaya
(80 s/d 300 KΩ)
R2 = Nilai resistor pada rangkaian
Vcc = Sumber tegangan
Vout akan diumpankan ke basis transistor C945, karena tegangannya lebih besar dari
0,7 volt yaitu 2,619 Volt maka transistor akan saturasi.
Emiter transistor C945 diinputkan ke Op Amp LM 358 untuk diperkuat. LM358
akan diperkuat sampai maksimal 100 kali penguatan, penguatan ini dapat diatur
dengan mengatur hambatan pada potensio. Output Op Amp pertama akan diperkuat
lagi sampai maksimum 100 kali penguatan. Dengan demikian penguatan dapat diatur
sesuai dengan yang dikehendaki. Dan Sesuai dengan prinsip :
Ω =
K R A Potensio
V
1 maka
dapat diketahui besar penguatan yang telah di lakukan. LED akan menyala jika sensor
menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra
merah
Gambar 4.3. Rangkaian Penguji Penerima Sinar Infra Merah.
4.5 Pengujian Rangkaian Keypad
Pengujian rangkaian tombol ini dapat dilakukan dengan menghubungkan rangkaian ini
dengan mikrokontroler AT89S51, kemudian memberikan program sederhana untuk
mengetahui baik/tidaknya rangkaian ini. Rangkaian dihubungkan ke port 2. Untuk
Mengecek penekanan pada 4 tombol yang paling atas, maka data awal yang
dimasukkan ke port 2 adalah FEH. Dengan demikian maka pin P2.0 akan mendapat
Gambar 4.4. Rangkaian Penguji Keypad
Jika terjadi penekanan pada Tbl 1, maka P2.0 akan terhubung ke P2.4 yang
menyebabkan P2.4 juga akan mendapatkan logika low (0). Seperti berikut,
P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0
1 1 1 0 1 1 1 0
Data pada port 2 akan berubah menjadi EEH. Data inilah sebagai indikasi adanya
penekanan pada tombol 1.
Jika terjadi penekanan pada Tbl 2, maka P2.0 akan terhubung ke P2.5 yang
P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0
1 1 0 1 1 1 1 0
Data pada port 2 akan berubah menjadi DEH. Data inilah sebagai indikasi adanya
penekanan pada tombol 2. Demikian seterusnya untuk tombol-tombil yang lain.
Program yang diisikan pada mikrokontroler untuk menguji rangkaian keypad
adalah sebagai berikut:
Tombol1:
Mov P1,#0FEH
Mov a,P0
Cjne a,#0EEH,Tombol2
Setb P0.0
Sjmp Tombol1
Tombol2:
Cjne a,#0DEH,Tombol1
Clr P0.0
Sjmp Tombol1
Program diatas akan menunggu penekanan pada tombol 1 dan tombol 2, jika
tombol 1 ditekan, maka program akan menyalakan LED yang ada pada P3.7. Jika
tombol 2 ditekan, maka program akan mematikan LED yang ada pada P3.7.
Jika rangkaian telah berjalan sesuai program yang diberikan, maka rangkaian
4.6 Pengujian Rangkaian Driver Motor Stepper
Rangkaian driver motor stepper ini terdiri dari empat masukan dan empat keluaran,
dimana masing-masing masukan dihubungkan dengan mikrokontroler AT89S51 dan
keluarannya dihubungkan ke motor stepper. Rangkaian ini akan bekerja memutar motor
stepper jika diberi sinyal high (1) secara bergantian pada ke-4 masukannya.
Rangkaiannya seperti gambar di bawah :
Gambar 4.5. Rangkaian Penguji Driver Motor Stepper
Rangkaian ini terdairi dari 2 buah transistor NPN TIP 122 dan 2 buah transistor
PNP TIP 127. Masing-masing transistor dihubungkan ke P0.0, P0.1, P0.2 dan P0.3
pada mikrokontroler AT89S51. Basis dari masing-masing transistor diberi tahanan 10
Kohm untuk membatasi arus yang masuk ke transistor. Kolektor dihubungkan dengan
kumparan yang terdapat pada motor stepper, kemudian kumparan dihubungkan dengan
sumber tegangan 12 volt.dan emitor dihubungkan ke ground.
Jika P0.0 diberi logika high (1), yang berarti basis pada transistor TIP 122
terhubungnya kolektor dengan emitor, sehingga kolektor mendapatkan tegangan 0 volt
dari ground. Hal ini menyebabkan arus akan mengalir dari sumber tegangan 12 volt ke
kumparan, sehingga kumparan akan menghasilkan medan magnet. Medan magnet ini
akan menarik logam yang ada pada motor, sehingga motor mengarah pada kumparan
yang memiliki medan magnet tesebut.
Jika kemudian P0.0 di beri logika low (0), yang berarti transistor tidak aktip dan
tidak ada arus yang mengair pada kumparan, sehingga tidak ada medan magnet pada
kumparan. Dan disisi lain P0.1 diberi logika high (1), sehingga kumparan yang
terhubung ke P0.1 akan menghasilkan medan magnet. Maka motor akan beralih kearah
kumparan yang terhubung ke P0.1 tersebut. Seterusnya jika logika high diberikan
secara bergantian pada input dari driver motor stepper, maka motor stepper akan
berputar sesuai dengan arah logika high (1) yang diberikan pada inputnya.
Untuk memutar dengan arah yang berlawanan dengan arah yang sebelumnya,
maka logika high (1) pada input driver motor stepper harus diberikan secara bergantian
dengan arah yang berlawanan dengan sebelumnya.
Program yang diberikan pada driver motor stepper untuk memutar motor
stepper adalah sebagai berikut :
mov a,#11h
putar:
mov P0,a
acall tunda
Rl a
jmp putar
Program diawali dengan memberikan nilai 11h pada pada accumulator (a), kemudian
nilai port 0 adalah 11h. ini berarti P0.0 dan P0.4 mendapatkan logika high sedangkan
yang lainnya mendapatkan logika low, seperti table di bawah ini,
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 0 1 0 0 0 1
Logika Pada Motor Stepper
Program dilanjutkan dengan memanggil rutin tunda. Lamanya tunda akan
mempengaruhi kecepatan perputaran motor. Semakin lama maka tunda, maka
perputaran motor akan semakin lambat. Perintah berikutnya adalah Rl a,perintah ini
akan memutar nilai yang ada pada accumulator (a), seperti tampak pada table di bawah
ini,
a 0 0 0 1 0 0 0 1
Rl
a 0 0 1 0 0 0 1 0
Dst...
Nilai pada accumulator (a) yang awalnya 11h, setelah mendapat perintah Rl a, maka
nilai pada accumulator (a) akan merubah menjadi 22h. Kemudian program akan
melihat apakah kondisi sensor buka pintu dalam keadaan high (1) atau low (0). Jika
high (1),
Nilai yang ada pada accumulator (a), akan kembali diisikan ke port 0, maka
nilai di port 0 akan berubah menjadi 22h, ini berarti P0.1 dan P0.5 mendapatkan logika
P0.7 P0.6 P0.5 P0.4 P0.3 P0.2 P0.1 P0.0
P0 0 0 1 0 0 0 1 0
Logika Pada Motor Stepper
Sebelumnya telah dibahas bahwa P0.0, P0.1, P0.2, dan P0.3 dihubungkan ke masukan
driver motor stepper, dengan program di atas maka P0.0, P0.1, P0.2, dan P0.3 akan
mendapatkan nilai high (1) secara bergantian. Hal ini menyebabkan motor stepper akan
berputar membuka pintu.Hal yang sama juga berlaku ketika motor berputar kaearah
sebaliknya, perbedaannya hanya pada perintah rotate. Jika pada perintah berlawanan
arah jarum jam digunakan rotate left ( Rl ), maka pada perintah searah jarum jam
digunakan perintah rotate right ( Rr). Perputaran perintah Rr diperlihatkan pada table
berikut,
a 1 0 0 0 1 0 0 0
R r
a 0 1 0 0 0 1 0 0
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari evakuasi hasil kerja alat dapat diambil beberapa kesimpulan dalam penelitian ini.
Kesimpulan yang diambil oleh penulis adalah:
1. Jika hambatan pada fotodioda lebih besar dari 15Mohm maka arus akan
kecil dan jika hambatan lebih kecil dari 300Kohm maka arus akan lebih
besar.
2. Besar hambatan pada fotodioda lebih besar bila tidak terkena cahaya
dibanding terkena cahaya.
3. Sistem tidak mampu bekerja/berfungsi bila tidak ada daya, maka diperlukan
daya cadangan.
4. Alat yang sudah dirancang ini termasuk kedalam alat friendly/yang mudah