Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
TUGAS AKHIR
PENGARUH PERUBAHAN ARUS EKSITASI TERHADAP ARUS JANGKAR DAN FAKTOR DAYA
PADA MOTOR SINKRON 3 FASA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU
)
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh:
BUHARI TONGAM RAJAGUKGUK 030402066
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
PENGARUH PERUBAHAN ARUS EKSITASI TERHADAP ARUS JANGKAR DAN FAKTOR DAYA
PADA MOTOR SINKRON 3 FASA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Oleh :
BUHARI TONGAM RAJAGUKGUK NIM : 030402066
Tugas Akhir ini Diajukan Untuk Melengkapi Salah Satu Syarat Untuk Memperoleh Gelar Sarjana Teknik Elektro
Disetujui Oleh : Pembimbing
IR.SATRIA GINTING NIP : 131836676
Diketahui Oleh :
A.n. Ketua Departemen Teknik Elektro Sekretaris Departemen Teknik Elektro
RACHMAD FAUZI, ST, MT
NIP : 132161239
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan atas berkat dan perlindungan
serta segala tuntunan yang diberikan-Nya dalam penyelesaian tugas akhir ini. Tugas
akhir ini merupakan suatu syarat bagi penulis untuk memperoleh gelar Sarjana
Teknik dari Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara
Adapun judul tugas akhir ini adalah: “Pengaruh Perubahan Arus Eksitasi
Terhadap Arus Jangkar dan Faktor Daya Pada Motor Sinkron Tiga Fasa (Aplikasi
pada Laboratorium Konversi Energi Listrik FT-USU)”.
Selama penulisan tugas akhir ini, penulis mendapatkan banyak bantuan baik
berupa bimbingan dan saran. Dengan rasa syukur penulis mengucapkan terima kasih
kepada :
1. Orang tuaku bapak D. Rajagukguk dan ibu (Almh) M. Simanjuntak dan ibu
R.M. Simanjuntak serta saudara-saudaraku, bang Sunan, bang Rudy, kak
Titin serta adikku Lenny yang tidak pernah berhenti memberi dukungan,
semangat dan doa serta segala pengorbanan yang tidak ternilai besarnya.
2. Bapak Ir. Satria Ginting, selaku dosen pembimbing tugas akhir yang telah
banyak membantu dalam penyelesaikan tugas akhir ini.
3. Bapak (Alm) Ir. Nasrul Abdi, MT, selaku Ketua Departemen Teknik Elektro
Fakultas Teknik USU.
4. Bapak Ir. Rahmad Fauzi, ST, MT, selaku Sekretaris Departemen Teknik
Elektro Fakultas Teknik USU.
5. Seluruh staff pengajar dan pegawai Departemen Teknik Elektro Fakultas
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
6. Staff administrasi dan asisten Laboratorium Konversi Energi Listrik yang
sudah menyediakan waktunya.
7. Oppung br.Sianipar, Bapauda Ir. S. Rajagukguk dan Ir. A. Rajagukguk yang
banyak memberikan motivasi dan inspirasi selama masa perkuliahan.
8. Seluruh teman-teman di Teknik Elektro khususnya stambuk 2003 yang tidak
dapat saya sebutkan satu persatu, atas bantuan yang diberikan kepada saya.
9. Semua pihak yang telah membantu penulis baik moral, spiritual maupun
material yang tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa dalam tugas akhir ini masih terdapat kekurangan.
Kritik dan saran yang membangun demi tujuan menyempurnakan dan
mengembangkan tugas akhir ini sangat penulis harapkan.
Akhir kata, semoga tugas akhir ini bisa bermanfaat dan menambah wawasan
bagi kita semua.
Medan, Juni 2009
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Abstrak
Keuntungan terbesar motor sinkron adalah faktor dayanya dapat diatur
dengan pengaturan arus eksitasi pada medan rotornya. Ketika arus eksitasi dinaikkan
melebihi eksitasi normalnya (over-excitation), faktor daya, seperti terukur pada
terminal motor menjadi leading karena motor sinkron dengan eksitasi lebih
menghasilkan daya reaktif.
Dengan mengoperasikan motor sinkron pada faktor daya leading, faktor daya
sistem dapat ditingkatkan dan dapat memperbaiki jatuh tegangannya. Jika eksitasi
kurang dari eksitasi normalnya (under-excitation), faktor daya motor menjadi lagging
dan akan menarik daya reaktif dari sistem.
Oleh karena itu dalam tulisan ini akan dibahas bagaimana pengaruh
perubahan arus eksitasi terhadap arus jangkar (Ia) dan faktor daya (cos ) pada
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
DAFTAR ISI
Kata Pengantar ...i
Abstrak ... iii
Daftar Isi ... iv
Daftar Gambar ... viii
Daftar Tabel ... x
BAB I : PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan Penulisan ... 2
1.3 Manfaat Penulisan... 2
1.4 Batasan Masalah ... 3
1.5 Metode Penelitian ... 3
1.6 Sistematika Penulisan ... 5
BAB II: MOTOR SINKRON TIGA FASA
2.1 Umum... 62.2 Konstruksi Motor Sinkron Tiga Fasa ... 7
2.2.1 Stator ... 7
2.2.2 Rotor ... 9
2.3 Kumparan Peredam (Damper Winding) ... 10
2.4 Reaksi Jangkar ... 11
2.5 Rangkaian Ekivalen Motor ... 13
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.7 Daya Kopel Yang Dibangkitkan Motor Sinkron ... 20
2.8 Metode Menjalankan Motor Sinkron ... 22
2.8.1 Starting Motor Sinkron Dengan Penggerak Mula ... 24
2.8.2 Starting Motor Sinkron Dengan Mereduksi Frekuensi ... 24
2.8.3 Starting Motor Sinkron Dengan Kumparan Peredam ... 25
2.9 Sistem Eksitasi Motor Sinkron ... 25
2.9.1 Sistem Eksitasi Tipe Sikat ... 26
2.9.2 Sistem Eksitasi Tipe Tanpa Sikat... 26
2.10 Karakteristik Motor Sinkron ... 27
2.10.1 Karakteristik Torsi-Putaran ... 28
2.10.2 Pengaruh Kenaikan Beban Pada Eksitasi Konstan ... 28
2.11 Kondensor Sinkron ... 29
2.12 Kerugian, Keuntungan Dan Aplikasi Motor Sinkron... 31
2.12.1 Kerugian Motor Sinkron ... 31
2.12.2 Keuntungan Motor Sinkron ... 31
2.12.3 Aplikasi Dan Penggunaan Motor Sinkron ... 32
BAB III : PENGARUH PERUBAHAN ARUS EKSITASI PADA MOTOR SINKRON TIGA FASA 3.1 Umum... 33
3.2 Pengaruh Perubahan Arus Eksitasi ... 33
3.2.1 Karakteristik Kurva V Motor Sinkron... 38
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB IV : PENGARUH PERUBAHAN ARUS EKSITASI TERHADAP ARUS JANGKAR DAN FAKTOR DAYA PADA MOTOR
SINKRON TIGA FASA
4.1 Umum ... 40
4.2 Peralatan Yang Digunakan ... 40
4.3 Menentukan Reaktansi Mesin Sinkron Tiga Fasa ... 42
4.3.1 Pengujian Beban Nol Mesin Sinkron (Dioperasikan Sebagai Generator) ... 42
a. Rangkaian Pengujian ... 42
b. Prosedur Pengujian ... 42
c. Data Hasil Pengujian ... 43
d. Grafik Data Hasil Pengujian ... 43
4.3.2 Pengujian Hubung Singkat Mesin Sinkron (Dioperasikan Sebagai Generator) ... 44
a. Rangkaian Pengujian ... 44
b. Prosedur Pengujian ... 44
c. Data Hasil Pengujian ... 45
d. Grafik Data Hasil Pengujian ... 46
4.3.3 Pengukuran Tahanan Jangkar ... 46
a. Rangkaian Pengukuran ... 46
b. Prosedur Pengukuran ... 47
c. Data Hasil Pengukuran ... 47
d. Analisis Data Hasil Pengukuran ... 47
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
4.4 Pengujian Motor Sinkron Tiga Fasa ... 49
a. Rangkaian Pengujian ... 49
b. Prosedur Pengujian ... 49
c. Data Hasil Pengujian ... 50
d. Analisis Data Hasil Pengujian ... 51
4.5 Karakteristik Kurva V dan Kurva V Invers Motor Sinkron 3 Fasa Untuk Beban Berbeda ... 64
BAB V : PENUTUP 5.1. Kesimpulan ... 66
DAFTAR PUSTAKA ... 67
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
DAFTAR GAMBAR
Gambar 2.1 Kontruksi Motor Sinkron 7
Gambar 2.2 Penampang Stator 8
Gambar 2.3 Penampang Rotor Kutub Silinder 9
Gambar 2.4 Penampang Rotor Kutub Menonjol 10
Gambar 2.5 Kumparan Peredam Pada Rotor Kutub Menonjol 10
Gambar 2.6 Pengaruh Demagnetisasi (Demagnetising Effect) 11
Gambar 2.7 Pengaruh Distorsi Magnet (Cross-Magnetising Effect 12
Gambar 2.8 Pengaruh Magnetisasi (Magnetising Effect) 12
Gambar 2.9 Rangkaian Ekivalen Motor Sinkron Perfasa 13
Gambar 2.10 Penyederhanaan Rangkaian Ekivalen Motor Sinkron Perfasa 14
Gambar 2.11 Rangkaian Ekivalen Motor SinkronTiga Fasa 14
Gambar 2.12 Diagram Fasor Motor Sinkron Pada
(a) Faktor Daya Lagging 15
(b) Faktor Daya Unity 15
(c) Faktor Daya Leading 15
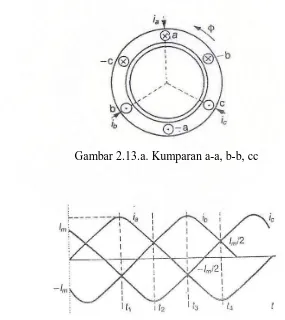
Gambar 2.13 (a) Kumparan a-a, b-b, cc 17
(b) Distribusi ia, ib, ic Sebagai Fungsi Waktu 17
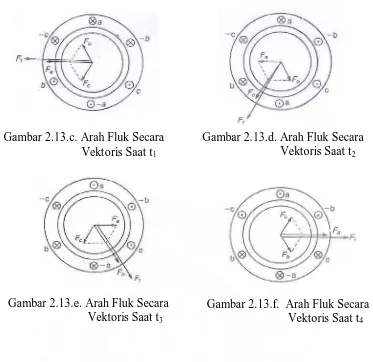
(c) Arah Fluks Secara Vektoris saat t1 18
(d) Arah Fluks Secara Vektoris saat t2 18
(e) Arah Fluks Secara Vektoris saat t3 18
(f) Arah Fluks Secara Vektoris saat t4 18
Gambar 2.14 Diagram Medan Magnet Motor Sinkron 19
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.16 Kurva Hubungan Antara Kopel Dan Sudut 21
Gambar 2.17 Masalah Arah Putaran Motor Sinkron 22
Gambar 2.18 Skema Motor Sinkron Dengan Sistem Eksitasi Tipe Sikat 26
Gambar 2.19 Skema Motor Sinkron Dengan Sistem Eksitasi Tanpa Sikat 27
Gambar 2.20 Karakteristik Torsi-Putaran Motor Sinkron 28
Gambar 2.21 Pengaruh Bertambahnya Beban Pada Operasi Motor Sinkron 29
Gambar 2.22 Ilustrasi Besarnya Beban Yang Dipikul Motor Sinkron 29
Gambar 2.23 Diagram Vektor Daya Reaktif Motor Sinkron Tanpa Beban 30
Gambar 3.1 (a) Operasi motor sinkron dengan faktor daya lagging
(Ra diabaikan) 36
(b) Pengaruh Bertambahnya Arus Eksitasi Pada
Operasi Motor Sinkron (Ra diabaikan) 37
Gambar 3.2 (a) Diagram Fasor Motor Sinkron Eksitasi Kurang 37
(b) Diagram Fasor Motor Sinkron Eksitasi Lebih 37
Gambar 3.3 Kurva V Motor Sinkron 39
Gambar 3.4 Kurva V Invers Motor Sinkron 39
Gambar 4.1 Rangkaian Perngujian Beban Nol Mesin Sinkron 42
Gambar 4.2 Grafik Perngujian Beban Nol Mesin Sinkron 44
Gambar 4.3 Rangkaian Perngujian Hubung Singkat Mesin Sinkron 44
Gambar 4.4 Grafik Data Perngujian Hubung Singkat Mesin Sinkron 46
Gambar 4.5 Rangkaian Pengukuran Tahanan Jangkar Motor Sinkron 46
Gambar 4.6 Rangkaian Pengujian Berbeban Motot Sinkron 49
Gambar 4.7 Diagram Fasor Pengaruh Perubahan Arus Eksitasi
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 4.8 Kurva V dan Kurva V Invers Motor Sinkron Beban Nol 57
Gambar 4.9 Diagram Fasor Pengaruh Perubahan Arus Eksitasi
Motor Sinkron Pada Setengah Beban Penuh 59
Gambar 4.10 Kurva V dan Kurva V Invers Motor Sinkron Untuk
Setengah Beban Penuh 61
Gambar 4.11 Diagram Fasor Pengaruh Perubahan Arus Eksitasi
Motor Sinkron Pada Beban Penuh 62
Gambar 4.12 Kurva V dan Kurva V Invers Motor Sinkron Untuk Beban Penuh 64
Gambar 4.13 Kurva V Motor Sinkron Untuk Beban Berbeda 64
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
DAFTAR TABEL
Tabel 4.1 Data Hasil Perngujian Beban Nol Mesin Sinkron 43
Tabel 4.2 Hasil Pengujian Hubung Singkat Mesin Sinkron 45
Tabel 4.3 Data Hasil Pengukuran Tahanan Jangkar 47
Tabel 4.4 Data Hasil Perhitungan Reaktansi Sinkron 48
Tabel 4.5 Data Hasil Pengujian Berbeban Motor Sinkron 50
Tabel 4.6. Data Hasil Perhitungan Untuk Beban Nol 54
Tabel 4.7. Data Hasil Perhitungan IF vs IA dan IF vs cos Untuk Beban Nol 55
Tabel 4.8 Data Hasil Perhitungan Untuk Setengah Beban Penuh 58
Tabel 4.9 Data Hasil Perhitungan IF vs IA dan IFvs cos Untuk
Setengah Beban Penuh 59
Tabel 4.10 Data Hasil Perhitungan Untuk Beban Penuh 61
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB I PENDAHULUAN
1.1. Latar Belakang
Motor sinkron tiga fasa adalah mesin listrik arus bolak-balik (AC) yang
digunakan untuk mengubah energi listrik menjadi energi mekanik. Sesuai dengan
namanya, motor ini beroperasi pada sumber tegangan tiga fasa dimana kecepatan
medan putar stator (Ns) sinkron dengan kecepatan putaran rotornya (Nr).
Ada dua sumber pembangkitan fluks pada motor sinkron tiga fasa yaitu
sumber arus bolak-balik (AC) yang dihubungkan ke kumparan jangkar di stator dan
sumber arus searah (DC) yang dihubungkan ke kumparan medan di rotornya sebagai
medan penguat/ eksitasi. Eksitasi ini dialirkan ke rotor melalui dua cara yaitu dengan
sistem eksitasi tipe sikat (brush-type exitation system) dan sistem eksitasi tanpa sikat
(brushless exitation system).
Tidak seperti halnya motor induksi yang selalu bekerja pada faktor daya
lagging, motor sinkron dapat dioperasikan pada daerah faktor daya yang luas yaitu
dari faktor daya lagging, faktor daya unity dan faktor daya leading dengan
pengaturan arus eksitasinya.
Ketika arus eksitasi pada rotor cukup untuk membangkitkan fluks yang
diperlukan motor, maka stator tidak perlu memberikan arus magnetisasi atau daya
reaktif dan motor bekerja pada faktor daya unity. Ketika arus eksitasi pada rotor
kurang, stator akan menarik arus magnetisasi dari jala-jala sehingga motor bekerja
pada faktor daya lagging. Sebaliknya bila arus eksitasi lebih, kelebihan fluks ini
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
sehingga motor bekerja pada faktor daya leading. Motor sinkron dengan faktor daya
leading ini dapat memperbaiki faktor daya pada suatu sistem. Pada tulisan ini akan
dipelajari pengaruh perubahan arus eksitasi terhadap arus jangkar dan faktor daya
motor sinkron tiga fasa.
1.2. Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah :
1. Mendapatkan pengaruh perubahan arus medan terhadap arus jangkar pada
motor sinkron tiga fasa.
2. Mendapatkan pengaruh perubahan arus medan terhadap faktor daya pada
motor sinkron tiga fasa.
1.3. Manfaat Penulisan
Manfaat penulisan tugas akhir ini adalah :
1. Menambah pengetahuan dan wawasan bagi penulis dan mahasiswa tentang
motor sinkron tiga fasa.
2. Sebagai bahan tulisan untuk menambah percobaan/ praktikum
mesin-mesin elektrik dan konversi energi listrik di Laboratorium Konversi Energi
Listrik FT – USU.
1.4. Batasan Masalah
Agar tujuan dan pembahasan dari penulisan tugas akhir ini lebih terfokus dan
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
masalah yang akan dibahas. Adapun batasan masalah pada penulisan tugas akhir ini
adalah :
1. Analisa percobaan berdasarkan peralatan yang tersedia pada Laboratorium
Konversi Energi Listrik FT-USU.
2. Tidak membahas mengenai pengaturan kecepatan motor sinkron.
3. Tidak membahas rugi-rugi motor sinkron tiga fasa
1.5. Metode Penelitian
Metode yang digunakan dalam penulisan tugas akhir ini adalah :
1. Studi Literatur
Berupa studi kepustakaan dan kajian dari berbagai sumber pustaka yang
relevan mendukung dalam penulisan tugas akhir ini.
2. Studi Laboratorium
Melakukan pengujian di laboratorium untuk mendapatkan data-data yang
diperlukan.
3. Studi Bimbingan
Dalam hal ini penulis melakukan diskusi tentang topik tugas akhir ini
dengan dosen pembimbing yang telah ditunjuk oleh Departemen Teknik
Elektro.
1.6. Sistematika Penulisan
Untuk memberikan gambaran mengenai tulisan ini, secara singkat dapat
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang
masalah, tujuan penulisan, batasan masalah, manfaat penulisan, metode
dan sistematika penulisan.
BAB II MOTOR SINKRON 3 FASA
Bab ini menjelaskan teori umum mengenai motor sinkron, konstruksi
motor sinkron tiga fasa, kumparan bantu (damper winding), reaksi jangkar,
rangkaian ekivalen, prinsip kerja, daya dan kopel yang dibangkitkan,
metode menjalankan motor sinkron, sistem eksitasi, karakteristik
torsi-putaran, pengaruh perubahan beban pada eksitasi konstan, kondensor
sinkron, keuntungan dan kerugian serta aplikasi motor sinkron
BAB III PENGARUH PERUBAHAN ARUS EKSITASI PADA MOTOR
SINKRON 3 FASA
Bab ini akan menjelaskan mengenai pengaruh perubahan eksitasi pada
perilaku motor sinkron, diagram fasornya, karakteristik Kurva V (IA =
f(IF)) dan Kurva V Invers (Cos = f(IF)) motor sinkron.
BAB IV ANALISIS PENGARUH PERUBAHAN ARUS EKSITASI TERHADAP
ARUS JANGKAR DAN FAKTOR DAYA PADA MOTOR SINKRON 3
FASA
Bab ini berisikan tentang jenis komponen dan spesfikasi peralatan
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
analisis pengaruh perubahan arus eksitasi terhadap arus jangkar dan faktor
daya.
BAB V KESIMPULAN
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB II
MOTOR SINKRON TIGA FASA
2.1. Umum
Motor sinkron tiga fasa adalah motor listrik arus bolak-balik (AC) yang
putaran rotornya sinkron/serempak dengan kecepatan medan putar statornya. Motor
ini beroperasi pada sumber tegangan tiga phasa yang dihubungkan dengan kumparan
jangkar di stator. Selain mendapat suplai tegangan tiga fasa, motor sinkron juga
mendapat arus eksitasi/arus medan dari sumber arus searah (DC) pada kumparan
medan di rotornya.
Motor sinkron pada pengoperasiannya tidak dapat melakukan start awal (self
starting). Oleh karena itu, motor sinkron tiga phasa membutuhkan penggerak mula
(prime mover) untuk memutar rotor sampai pada kecepatan putar medan putar stator.
Perubahan beban pada motor sinkron tidak mempengaruhi kecepatan putar
motor karena ketika motor bekerja, rotor akan selalu terikat atau terkopel secara
magnetis dengan medan putar dan dipaksa untuk berputar dengan kecepatan
sinkronnya sehinga motor sinkron biasanya digunakan pada sistem operasi yang
membutuhkan kecepatan konstan dengan beban yang berubah-ubah.
Keuntungan lain dari motor sinkron adalah dapat digunakan untuk
memperbaiki faktor daya sistem karena karakteristiknya pada saat eksitasi lebih.
Stator akan menarik arus yang bersifat kapasitif dari jala-jala dan sehingga motor
bekerja pada faktor daya leading (leading). Hal ini akan dapat memperbaiki faktor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.2. Konstruksi Motor Sinkron Tiga Fasa
Konstruksi motor sinkron pada prinsipnya adalah sama dengan generator
sinkron. Kalaupun ada perbedaan secara fisik yaitu adanya kumparan peredam
(Damper Winding) yang ditanamkan pada muka kutub rotor yang berfungsi untuk
start awal pada motor sinkron. Secara umum, konstruksi dari sebuah motor sinkron
terdiri dari :
1. Stator adalah bagian dari motor yang diam
2. Rotor adalah bagian dari motor yang berputar
3. Celah udara adalah ruang antara stator dan rotor
Konstruksi dari motor sinkron dapat dilihat dari gambar 2.1 dibawah ini:
2.2.1. Stator
Stator merupakan bagian yang diam dan mempunyai alur atau slot
memanjang yang di dalamnya terdapat belitan yang disebut dengan belitan jangkar
(Armature Winding).
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Secara umum stator terdiri dari kerangka stator, inti stator, belitan stator dan
slot.
1. Rangka Stator
Rangka stator berfungsi sebagai tempat melekatnya kumparan jangkar. Pada
rangka stator terdapat lubang pendingin dimana udara dan gas pendingin
disirkulasikan. Rangka stator biasanya dibuat dari besi campuran baja atau
plat baja giling yang dibentuk sedemikian rupa sehingga diperoleh rangka
yang sesuai dengan kebutuhan.
2. Inti Stator
Inti stator melekat pada rangka stator dimana inti ini terbuat dari
laminasi-laminasi besi khusus atau campuran baja. Hal ini dilakukan untuk
memperkecil rugi arus eddy. Tiap laminasi diberi isolasi dan diantaranya
dibentuk celah sebagai tepat aliran udara.
3. Slot
Slot adalah tempat konduktor berada yang letaknya pada bagian dalam
sepanjang keliling stator. Bentuk slot ada 3 jenis yaitu slot terbuka, slot
setengah terbuka, slot tertutup.
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.2.2. Rotor
Rotor berfungsi sebagai tempat belitan medan (eksitasi) yang membentuk
kemagnetan listrik kutub utara-selatan pada inti rotor. Belitan medan tersebut
dihubungkan dengan sumber eksitasi DC. Berdasarkan bentuknya ada 2 jenis rotor
pada motor sinkron yaitu kutub silinder dan kutub menonjol.
1. Rotor Kutub Silinder (Non-Salient Pole Rotor)
Rotor tipe ini dibuat dari plat baja berbentuk silinder yang mempunyai
sejumlah slot sebagai tempat kumparan. Karena adanya slot-slot dan
kumparan medan yang terletak pada rotor mengakibatkan jumlah kutub
sedikit. Selain itu motor ini memiliki putaran yang tinggi pada frekuensi yang
konstan. Tipe rotor biasanya berdiameter kecil dan sumbunya sangat panjang.
Konstruksinya memberikan keseimbangan mekanis yang lebih baik karena
rugi-rugi anginnya lebih kecil dibandingkan rotor kutub menonjol.
2. Rotor kutub menonjol (Salient Pole Rotor)
Rotor tipe ini mempunyai kutub yang jumlahnya banyak dan putarannya
rendah. Kutub menonjol ditandai dengan rotor berdiameter besar dan panjang
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
kutub diberi laminasi untuk mengurangi panas yang ditimbulkan oleh arus
Eddy.
2.3. Kumparan Peredam (Damper Winding)
Kumparan ini berfungsi untuk membantu motor sinkron melakukan start
langsung dan juga memberikan keuntungan pada stabilitas motor karena kumparan
ini mempunyai kecenderungan untuk meredam gejala peralihan (transient) pada
motor. Kumparan peredam yang juga sering dikatakan amortisseur winding,
merupakan pelat kumparan dengan tonjolan pada bagian muka kumparan rotor yang
ujung-ujungnya dihubung-singkatkan dengan cincin logam seperti kumparan sangkar
bajing (squirrel cage ) pada motor induksi.
Gambar 2.4. Penampang Rotor Kutub Menonjol
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.4. Reaksi Jangkar
Ketika motor sinkron dioperasikan, arus jangkar IA akan mengalir dan
membentuk fluksi jangkar a di stator. Fluksi jangkar ini kemudian akan
berinteraksi dengan fluksi medan m dari rotor dan akan mempengaruhi nilai
tegangan fasanya. Interaksi antara a dan m ini kemudian dikenal sebagai reaksi
jangkar. Pengaruh yang ditimbulkan reaksi jangkar dapat berupa distorsi, penguatan
(magnetising), maupun pelemahan (demagnetising) fluksi arus medan pada celah
udara. Pengaruh yang ditimbulkan reaksi jangkar dapat dilihat pada:
a. cos = lagging
Arus akan tertinggal sebesar 900 dari tegangan. Fluksi yang dihasilkan oleh
arus jangkar a akan melawan fluksi arus medan m sehingga fluks resultan
g pada celah udara akan berkurang dari m. Dengan kata lain reaksi jangkar
akan demagnetising artinya pengaruh reaksi jangkar akan melemahkan fluksi
arus medan (Demagnetising Effect).
b. cos = unity
Pengaruh fluksi jangkar terhadap fluksi medan hanyalah sebatas
mendistorsinya saja tanpa mempengaruhi kekuatannya (cross magnetising) Gambar 2.6. Pengaruh Demagnetisasi (Demagnetising Effect)
E lagging dari m sebesar 90°
I lagging dari E sebesar 90°
Oleh karena itu I lagging dari m sebesar 180°
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
c. cos = leading
Arus akan mendahului tegangan sebesar 900. Fluksi yang yang dihasilkan
arus jangkar akan searah dengan fluksi arus medan sehingga fluks resultan g
pada celah udara akan bertambah dari m. Reaksi jangkar yang terjadi akan
magnetising artinya pengaruh reaksi jangkar akan menguatkan fluksi arus
medan (Magnetising Effect).
Perubahan nilai tegangan terminal Vt akibat perubahan fluksi karena reaksi jangkar
dinyatakan sebagai reaktansi reaksi jangkar XM. Untuk jatuh tegangan akibat adanya
reaksi jangkar dinyatakan dengan jXMIA.
Gambar 2.8. Pengaruh Magnetisasi (Magnetising Effect)
E lagging dari m sebesar 90°
I leading dari E sebesar 90°
Sehingga I sefasa m
Karena a sefasa dengan I , a akan sefasa dengan m
Gambar 2.7. Pengaruh Distorsi Magnet (Cross-Magnetising Effect) E lagging dari m sebesar 90°
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.9 Rangkaian Ekivalen Motor Sinkron Perfasa
2.5. Rangkaian Ekivalen
Stator terdiri dari belitan-belitan dimana suatu belitan konduktor akan terdiri
dari tahanan RA dan induktansi L. Ketika motor bekerja maka arus akan mengalir
pada konduktor membentuk fluksi jangkar a yang akan membangkitkan medan
putar. Fluksi jangkar a akan berinteraksi dengan fluks medan m sehingga akan
terjadi konversi energi dari energi listrik menjadi energi mekanik. Pada kondisi ini,
ada fluks sisa yang tidak dapat berinteraksi dengan fluks medan disebut reaktansi
bocor XA. Akibatnya adanya pengaruh reaksi jangkar dan reaktansi bocor XA maka
rangkaian ekivalen suatu motor sinkron adalah seperti gambar 2.9:
Dengan melihat gambar 2.9 maka dapat ditulis persamaan tegangan motor sinkron
sebagai berikut :
V = EA + j.XA.IA + j.XM .IA + RA.IA (Volt) ...(2.1)
Dari persamaan (2.1) dapat dilihat bahwa selain karena adanya tahanan RA, penyebab
perbedaan antara tegangan induksi EA dan tegangan terminal Vt adalah reaktansi
bocor (XA) dan reaktansi reaksi jangkar (XM). Kedua reaktansi ini memiliki arah
yang sama, yaitu leading dari arus sebesar 90°. Karena itu keduanya dapat
disederhanakan menjadi XS yang disebut dengan reaktansi sinkron (XS= XA + XM)
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.10. Penyederhanaan Rangkaian Ekivalen Motor Sinkron Perfasa
Gambar 2.11. Rangkaian Ekivalen Motor Sinkron Tiga Fasa
V = EA + j.XS.IA + RA.IA (Volt) ...(2.2)
atau
EA = V - j.XS.IA - RA.IA (Volt) ...(2.3)
Persamaan ini sama dengan persamaan generator sinkron, kecuali tanda untuk
arusnya adalah terbalik.
Rf
Lf
EA
RA
V
IA
Vf
XS
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
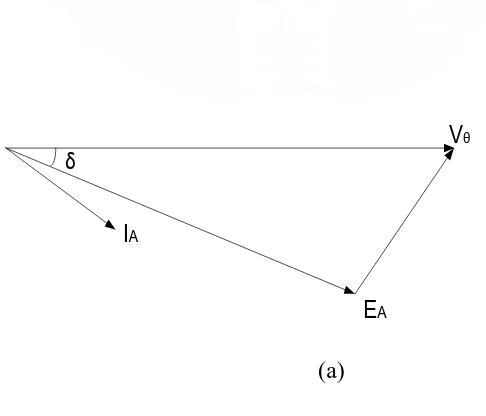
Dari persamaan (2.3) dapat digambarkan diagram fasor motor sinkron seperti
ditunjukkan pada gambar 2.12 berikut :
Gambar 2.12.a. Diagram Fasor Motor Sinkron Pada Faktor Daya Lagging
b. Diagram Fasor Motor Sinkron Pada Faktor Daya Unity
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Keterangan : EA = Tegangan Jangkar (ggl lawan)
IA = Arus Jangkar
V = Tegangan Terminal
XS = Reaktansi Sinkron
Zs = Impedansi Sinkron
RA = Tahanan Jangkar
Radj = Tahanan Variabel
= Sudut Kopel
= Sudut Daya
Saat motor sinkron dibebani tanpa pengaturan eksitasi, motor sinkron akan
beroperasi pada faktor daya lagging dan diagram fasornya seperti yang ditunjukkan
pada gambar (2.12.a). Oleh karena itu, untuk menganalisis motor sinkron digunakan
diagram fasor motor sinkron dengan faktor daya lagging.
2.6. Prinsip Kerja
Pada motor sinkron tiga fasa terdapat 2 sumber tegangan dari luar yaitu arus
bolak-balik (AC) yang dialirkan kebelitan jangkar dan arus searah (DC) yang
dialirkan kebelitan medannya. Perputaran rotor diakibatkan karena adanya kopel
magnetik antar medan magnet rotor dan medan putar stator. Kecepatan medan putar
stator adalah :
dimana f = frekwensi tegangan terminal motor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.13.a. Kumparan a-a, b-b, cc
Apabila tegangan tiga fasa dihubungkan kekumparan jangkar atau stator akan
menghasilkan arus tiga fasa yang mengalir pada kumparan stator tersebut. Jika arus
tiga fasa (yang berbentuk sinusoidal murni atau saling berbeda sudut 1200 listrik)
mengalir pada kumparan stator motor sinkron tiga fasa, maka akan menghasilkan
intensitas medan magnet (HS) yang juga saling berbeda sudut 1200 listrik. Karena
kumparan stator mempunyai permeabilitas ( ), maka akan menghasilkan intensitas
medan magnet BS = .HS
Hal inilah yang disebut dengan medan putar yang timbul pada stator.
Timbulnya medan putar pada stator ini dapat dijelaskan melalui gambar berikut.
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Saat tegangan tiga fasa dihubungkan ke kumparan a-a, b-b, c-c (gambar
2.13.a) dengan beda fasa masing-masing 1200. Maka akan timbul timbul 3 buah arus
sinusoidal (Ia, Ib, Ic) berdasarkan fungsi waktu seperti terlihat pada gambar (2.13.b).
Pada saat t1, t2, t3, t4, arah fluks resultan yang ditimbulkan oleh kumparan tersebut
masing-masing ditunjukkan seperti pada gambar (2.13.c, 2.13.d, 2.13.e, 2.13.f). Pada
saat t1, arah fluks resultannya sama dengan arah fluks yang dihasilkan kumparan a-a
(gambar 2.13.c). Pada saat t2, arah fluks resultannya sama dengan arah fluks yang
dihasilkan kumparan b-b (gambar 2.13.d). Pada saat t3, arah fluks resultannya sama
dengan arah fluks yang dihasilkan kumparan c-c (gambar 2.13.e). Pada saat t4, arah
fluks resultannya berlawanan arah dengan arah fluks yang dihasilkan kumparan a-a Gambar 2.13.d. Arah Fluk Secara
Vektoris Saat t2
Gambar 2.13.c. Arah Fluk Secara Vektoris Saat t1
Gambar 2.13.e. Arah Fluk Secara Vektoris Saat t3
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
(gambar 2.13.f). Perubahan arah fluks ini akan terjadi berulang setiap satu periode
yang menyebabkan perputaran medan magnet stator.
Kutub medan rotor yang diberi penguatan arus searah mengakibatkan
mengalir arus penguat IF motor dan menghasilkan medan magnet BR. Karena motor
sinkron tidak dapat melakukan start sendiri (self starting) maka rotor diputar dengan
suatu penggerak mula sampai pada kecepatan putar rotor sama dengan kecepatan
putar medan stator. Sehingga medan magnet rotor BR akan mendapat tarikan dari
kutub medan putar stator dan akan selalu menempel dan mengikuti putaran BS
dengan kecepatan yang sama atau sinkron. Interaksi antar kedua medan magnet
tersebut akan menghasilkan kopel yang dinyatakan sebagai :
Tind = k.BR x BS ..…...………..……...(2.5)
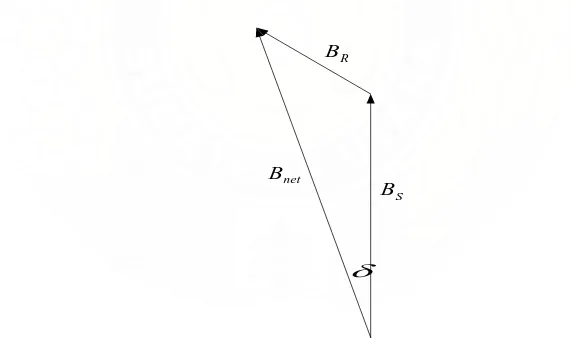
Dan hubungannya dengan diagram medan magnetnya adalah sebagai berikut :
δ
net B
S B R B
Gambar 2.14. Diagram Medan Magnet Motor Sinkron
Keterangan : BS = Medan magnet stator
BR = Medan magnet rotor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Sehingga didapat : Bnet = BS + BR
BS = Bnet + BR ...(2.6)
Dengan mensubstitusikan pesamaan (2.6) ke persamaan (2.5), maka diperoleh :
Tind = k.BR(Bnet – BR) Sin
Tind = k.BR.Bnet.Sin – k.(BR.BS) Sin BR.BR = 0
Sehingga persamaan kopel induksinya dapat dituliskan :
Tind = k.BR.Bnet.Sin Nm...(2.7)
2.7. Daya dan Kopel Yang Dibangkitkan Motor Sinkron
Berikut ini akan dijelaskan besar daya yang dibangkitkan oleh motor sinkron:
IA
A
E
B
C
D
EA
Vph
o
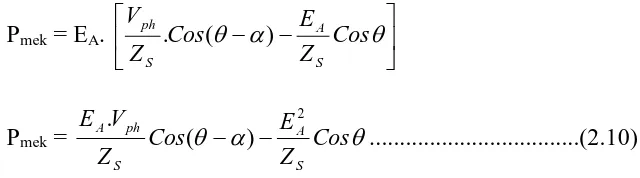
-Dari gambar 2.15, persamaan daya mekanis per fasa yang dibangkitkan pada poros
adalah sebesar :
Pmek = EA.IA.Cos ...(2.8)
Pada segitiga OBD, BD = IA.ZS. Cos , dimana BD=CD-BC= AE-BC, sehingga :
IA.ZS.Cos = Vph.Cos ( - ) – EA.Cos , dan didapat :
IA.Cos = (Vph / ZS). Cos ( - ) – (EA / ZS).Cos ...(2.9)
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.16. Kurva Hubungan Antara Kopel Dan Sudut Motor sinkron
Pmek = EA.
Adapun besarnya kopel yang dibangkitkan (berupa kopel ditambah dengan
rugi-rugi mekanisnya, baik berupa rugi gesekan maupun rugi angin) oleh motor
sinkron dinyatakan :
Adapun hubungan antara kopel dan sudut pada persamaan 2.12 ditunjukan pada gambar 2.16 sebagai berikut :
Operasi Motor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.8. Metode Menjalankan Motor Sinkron
Sesuai dengan prinsip kerjanya, motor sinkron tidak dapat melakukan start
sendiri (self starting). Hal ini disebabkan torsi start motor sinkron adalah nol. Berikut
akan dijelaskan keadaan motor sinkron dengan frekuensi 50 Hz saat start.
1. Pada keadaan mula-mula rotor motor dalam keadaan diam, dan karenanya
medan magnetnya (BR) pun dalam keadaan diam. Medan magnet stator (BS)
mulai menyapu sekeliling motor pada kecepatan sinkron.
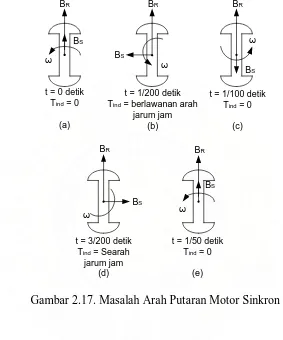
2. Pada gambar 2.17.a, memperlihatkan motor pada waktu t=0 detik, ketika BR
dan BS benar-benar sefasa/segaris, maka dari persamaan kopel induksinya
(persamaan 2.5), kopel induksi pada poros rotor sama dengan nol. Gambar 2.17. Masalah Arah Putaran Motor Sinkron
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
3. Pada gambar 2.17.b, menunjukkan situasi rotor pada saat t=1/200 detik, rotor
baru saja bergerak, tetapi medan magnet stator sekarang bergerak kekiri.
Kembali dengan persamaan 2.5, kopel pada poros rotor sekarang berlawanan
dengan arah jarum jam.
4. Pada gambar 2.17.c, menunjukkan situasi pada t=1/100 detik, dimana BR dan
BS berada pada arah yang berlawanan sehingga kopel induksi poros rotor
sama dengan nol.
5. Pada gambar 2.17.d, menunjukkan situasi start pada saat t=3/200 detik,
medan magnet stator sekarang menunjukkan ke kanan, sehingga kopel pada
poros rotor searah dengan jarum jam
6. Pada gambar 2.17.e, menunjukkan pada waktu t=1/50 detik, BR dan BS
kembali pada posisi segaris dan kopel induksinya sama dengan nol.
Jadi selama satu siklus listrik diatas, kopel mula-mula kopel mula-mula
berlawanan dengan arah jarum jam dan kemudian searah jarum jam, sehingga kopel
rata-rata selamam satu siklus listrik sama dengan nol. Maka rotor tersebut akan
terguncang/ bervibrasi dan akan menimbulkan panas berlebihan. Untuk mengatasi
hal tersebut, maka didapatkan 3 cara agar motor sinkron dapat di-start dengan aman,
yaitu :
1. Menggunakan penggerak mula (prime mover) eksternal untuk memutar
motor sinkron sampai pada kecepatan sinkronnya.
2. Mereduksi putaran dengan mengatur medan stator ke harga yang cukup
rendah sampai rotor berputar.
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.8.1. Starting Motor Sinkron Dengan Penggerak Mula Eksternal
Pada metode start motor sinkron dengan penggerak mula, poros rotor motor
sinkron dikopel dengan poros rotor penggerak mula (prime mover) eksternal,
selanjutnya penggerak mula akan memutar rotor motor sinkron sampai mencapai
putaran sinkronnya. Selanjutnya motor sinkron tersebut diparalelkan dengan jala-jala
dan bekerja sebagai generator. Setelah hal ini dicapai, penggerak mula dilepas dari
poros motor. Ketika penggerak mula dilepas dari poros motor, poros motor akan
berputar perlahan (putarannya menurun) sehingga medan magnet BR akan lagging
dibelakang Bnet dan mesin akan start beraksi sebagai motor. Saat paralelnya sudah
selesai, maka motor sudah dapat dibebani.
2.8.2. Starting Motor Sinkron Dengan Mereduksi Frekwensi
Putaran medan magnet stator yang cepat membuat tidak mungkinnya terjadi
interaksi tarik-menarik dan tolak menolak antara kutub medan magnet stator dengan
kutub medan magnet rotor yang diam sehingga motor sinkron tidak dapat melakukan
start sendiri (self starting).
Pada metode start dengan mereduksi frekwensi ini, pada saat start, motor
disuplai dengan frekwensi yang rendah sehingga kecepatan putaran medan putar
stator juga rendah. Hal ini akan membuat terjadinya interaksi tarik-menarik dan
tolak-menolak antara kutub medan magnet stator dan kutub medan magnet rotor.
Setelah terjadi interaksi antara kedua kutub medan magnet tersebut, maka frekwensi
sistem pun dinaikkan secara perlahan sampai pada frekwensi dan kecepatan sinkron
yang diinginkan. Saat ini, pengaturan besar frekwensi yang disuplai dapat dilakukan
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.8.3. Starting Motor Dengan Kumparan Peredam (Damper Winding)
Pada metode start dengan kumparan peredam, rotor dilengkapi dengan
kumparan peredam atau kumparan sangkar bajing yang ditempatkan pada permukaan
rotor yang dihubung singkat pada kedua ujungnya.
Saat kumparan stator dihubungkan dengan tegangan tiga fasa maka akan
timbul medan putar pada stator. Kemudian medan putar ini akan menginduksikan ggl
kedalam kumparan peredam yang telah terhubung singkat, maka dalam kumparan
peredam akan mengalir arus. Arus ini akan menimbulkan kopel antara rotor dan
stator secara magnetis sehingga rotor pun berputar. Namun kecepatan putar rotor
tidak sama dengan kecepatan sinkronnya. Pada saat ini, motor sinkron bertindak
sebagai motor induk si. Setelah putaran rotor hampir mencapai kecepatan sinkronnya,
maka kumparan medan penguat yang berada pada rotor dieksitasi dengan sumber
DC. Selanjutnya motor akan menuju ke keadaan sinkron. Namun dalam pelaksanaan
metode start ini dibutuhkan alat pengaturan sinkronisasi untuk menghindarkan efek
yang dapat merusak motor tersebut.
2.9. Sistem Eksitasi
Ada dua metode yang umum digunakan untuk aplikasi arus medan DC yang
disuplai ke rotor motor sinkron yaitu :
1. Sistem Eksitasi tipe sikat (Brush-Type Exitation System)
2. Sistem Eksitasi Tanpa sikat (Brushless-Type Exitation system)
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
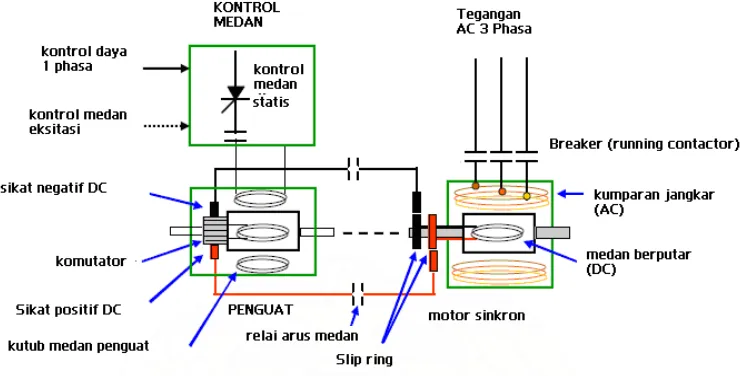
2.9.2. Pada metode eksitasi ini arus eksitasi untuk motor sinkron disuplai oleh sebuah generator arus searah (DC) yang dikenal sebagai Exciter.
Exciter ini diputar salah satunya oleh motor sinkron itu sendiri (garis
putus-putus) atau motor lain yang terpisah. Medan Shunt dari exciter dihubungkan ke
sebuah control medan statis. Beberapa kontrol eksitasi dibuat manual untuk
pengaturan arus medannya, tetapi ada juga yang dibuat otomatis untuk mengatur arus
medan motor sinkron dalam sebuah konfigurasi loop tertutup yang didesain untuk
mengendalikan besar arus medan untuk variasi beban atau untuk mengatur faktor
daya tetap. Keluaran DC dari exciter ini akan di suplaikan ke medan magnet rotor
motor sinkron melalui slip ring motor.
2.9.2. Sistem Eksitasi Tanpa Sikat
Metode eksitasi ini mengeliminasi kebutuhan akan sikat, antara exciter dan
motor. Tegangan DC pada kumparan rotor motor disuplaikan melalui poros yang
menghubungkan exciter dan motor sinkron.
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Ketika motor di start kontak A akan tertutup dan tegangan tiga phasa akan
disupalikan ke kumparan stator. Motor sinkron di start seperti motor induksi
menggunakan kumparan amortisir pada permukaan rotornya. Kontak B juga tertutup
dan keluaran DC akan disuplaikan ke kumparan stator exiter.
Pada kumparan rotor exciter akan di induksikan tegangan dan tegangan ini
akan disearahkan oleh penyearah berputar (rotating rectifier). Ketika putaran rotor
mendekati kecepatan sinkronnya, SCR akan bekerja dan tegangan DC dari exciter
akan disuplaikan ke kumparan rotor motor sinkron.
2.10. Karakteristik Motor Sinkron
Adapun karakteristik yang umum pada motor sinkron yaitu karakteristik
torsi-putaran dan pengaruh kenaikan beban dengan eksitasi konstan, serta pengaruh
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
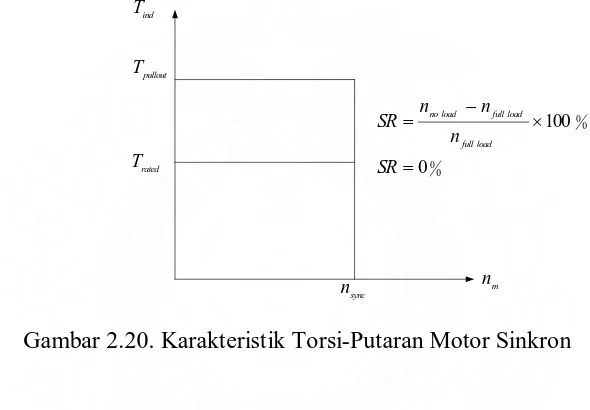
Gambar 2.20. Karakteristik Torsi-Putaran Motor Sinkron
2.10.1. Karakteristik Torsi-Putaran Pada Motor Sinkron
Motor sinkron biasanya dihubungkan dengan suatu sistem daya yang besar
(infinite buses). Hal ini dimaksudkan agar tegangan terminal dan frekwensi sistem
akan selalu konstan. Kecepatan putaran motor terkunci pada frekwensi elektrik yang
disuplai, maka kecepatan motor juga akan tetap konstan. Karakteristik Kurva
Torsi-Putaran diperlihatkan pada gambar (2.16). Kecepatan steady-state motor adalah
konstan dari beban nol sampai torsi maksimum motor.
ind
Dari persamaan torsi pada motor (persamaan 2.12) diperoleh torsi maksimum atau
pull out torque terjadi saat = 900. Dan torsi normalnya akan lebih kecil dari harga tersebut. Kenyataannya, torsi maksimum dapat mencapai tiga kali dari pull out
torque pada mesin.
2.10.2. Pengaruh Kenaikan Beban Dengan Eksitasi Konstan
Bila beban dihubungkan ke poros motor sinkron, motor akan berusaha
mendapatkan torsi yang cukup agar motor tetap beroperasi memikul beban dengan
kecepatan sinkronnya. Jika beban yang ada diubah besarnya maka motor sinkron
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Beban berat
Sudut besar Beban ringan
Sudut kecil
Gambar 2.22. Ilustrasi Besarnya Beban Yang Dipikul Motor Sinkron Gambar 2.21. Pengaruh Bertambahnya Beban Pada Operasi Motor Sinkron
Jika beban pada poros dinaikkan, maka putaran rotor akan melambat (slow
down) untuk sesaat, karena sudut kopel akan semakin besar dan torsi induksi motor
sinkron juga akan bertambah besar. Peningkatan kopel induksi ini akhirnya
mempercepat putaran rotor dan motor kembali berputar pada kecepatan sinkronnya,
tetapi dengan sudut kopel yang lebih besar. Hal ini dapat di ilustrasikan sebagai
gandengan / kopling fleksibel yang memikul beban, untuk lebih jelasnya ditunjukkan
gambar 2.22.
NS
S
NS
S
1 2
2.11. Kondensor Sinkron
Apabila motor sinkron diberi eksitasi lebih, maka untuk mengkompensasi
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 2.23. Diagram Vektor Daya Reaktif Motor Sinkron Tanpa
(tanpa beban) yang diberi eksitasi lebih akan berfungsi sebagai kapasitor dan
mempunyai kemampuan untuk memperbaiki faktor daya. Motor sinkron demikian
disebut kondensor sinkron.
Motor sinkron tanpa beban dalam keadaan eksitasi tertentu dapat
menimbulkan daya reaktif. Perhatikan diagram vektor motor sinkron tanpa beban
pada gambar di bawah ini.
V
Pada kondisi ideal dan eksitasi normal dan Tahanan Jangkar RA diabaikan,
tanpa rugi-rugi, tegangan induksi akan sama dengan tegangan terminal dan sudut
daya akan sama dengan nol karena tidak ada daya output. Pada gambar (a),
penguatan normal sehingga V = E. Motor dalam keadaan tidak memberikan ataupun
menghasilkan daya reaktif. V berimpit dengan E karena dalam keadaan tanpa beban
sudut daya δ = 0. Pada gambar (b), eksitasi lebih sehingga E >V. Arus kapasitif
(leading current) ditarik dari jala-jala dimana daya aktif P = VI cos θ = 0. Jadi, motor
berfungsi sebagai pembangkit daya reaktif. Pada gambar (c), eksitasi kurang
sehingga E < V. Arus magnetisasi (lagging current) ditarik dari jala-jala sehingga
motor akan menyerap daya reaktif. Jadi Motor Sinkron dapat dioperasikan sebagai
penghasil daya reatif (Kondensor Sinkron) atau sebagai penyerap daya reakif.
Dengan sifat tersebut maka motor sinkron diaplikasikan untuk memperbaiki faktor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.12. Keuntungan, Kerugian dan Aplikasi Motor Sinkron
Pemilihan motor sinkron untuk berbagai aplikasi secara umum didasari atas
kebutuhan beban dan perkiraan ekonomis tertentu. Motor sinkron biasanya dibuat
berukuran daya yang besar, karena pada ukuran yang kecil motor sinkron kurang
ekonomis dibandingkan motor induksi.
2.12.1. Kerugian dan Kekurangan Motor Sinkron Antara Lain :
1. Pengaturan kecepatan putaran sulit dilakukan karena kecepatan putaran-nya
serempak dengan putaran medan statornya, sehingga satu-satunya cara untuk
merubah kecepatannya adalah dengan merubah frekuensi jala-jala.
2. Motor sinkron tidak dapat melakukan start sendiri,
rotornya harus diputar terlebih dahulu dengan penggerak mula (Prime Mover)
sampai putaran sinkronnya, sehingga sangat tidak efesien.
3. Membutuhkan suplai arus searah untuk medan
eksitasinya
2.12.2. Keuntungan Motor Sinkron Antara Lain :
1. Faktor daya motor sinkron dapat diatur dengan mudah melalui pengaturan
arus eksitasi.
2. Memiliki efisiensi tinggi dan kecepatannya yang konstan.
3. Untuk operasi sistem yang membutuhkan kecepatan dibawah 500 rpm dan
untuk beban yang membutuhkan daya (mekanis) yang besar, motor sinkron
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2.12.3. Aplikasi Dan Penggunaan Motor Sinkron Antara Lain :
Motor sinkron sering digunakan pada sistem yang membutuhkan kecepatan
konstan. Pemakaian yang umum adalah untuk menggerakkan kompressor yang
memiliki efisiensi yang tinggi.
1. Aplikasi motor sinkron sebagai motor penggerak (Motor Drive)
Karena mempunyai kecepatan yang konstan, tidak terpengaruh oleh perubahan
beban serta efesiensinya yang baik, maka motor sinkron sangat baik
digunakan untuk melayani beban yang membutuhkan kecepatan konstan
seperti pompa sentrifugal, mesin giling karet dan blower mesin, baling-baling,
crushers, mills, conveyor belts, grinders.
2. Aplikasi motor sinkron untuk perbaikan faktor daya
Dalam hal ini, motor sinkron dengan eksitasi lebih dapat digunakan untuk
membangkitkan daya reaktif sehingga dapat meningkatkan faktor daya sistem.
Motor sinkron tanpa beban yang khusus digunakan untuk memperbaiki faktor
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB III
PENGARUH PERUBAHAN ARUS EKSITASI PADA MOTOR SINKRON 3 FASA
3.1. Umum
Karakteristik yang umum dari suatu motor sinkron adalah pengaruh
perubahan eksitasi pada motor sinkron. Pengaruh perubahan eksitasi dari suatu motor
perlu diketahui untuk memahami perilaku dari motor listrik tersebut dalam berbagai
kondisi operasinya. Dalam tugas akhir ini akan dibahas pengaruh perubahan eksitasi
terhadap arus jangkar dan faktor daya motor sinkron tiga phasa. Pengaruhnya
tersebut dapat dilihat dalam bentuk diagram fasor, kurva v dan kurva v invers motor
sinkron.
Kurva v motor sinkron menunjukkan hubungan antara variasi arus eksitasi
terhadap arus jangkar, sedangkan kurva v invers menunjukkan hubungan antara
variasi arus eksitasi terhadap faktor daya
3.2. Pengaruh Perubahan Arus Eksitasi
Pengaruh perubahan arus eksitasi pada motor sinkron dapat dilihat dari
persamaan tengangan induksi berikut:
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Emax
maka E ...(3.1)
dimana : E = ggl induk si (volt)
f = frekwensi (Hz)
C = konstanta
n = putaran (rpm)
= fluks magnetik (weber)
N = jumlah belitan
p = jumlah kutub
dari persamaan fluksi, yaitu:
= B . A
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Dimana : B = Fluksi magnet
H = Intensitas medan magnet
A = Luas penampang konduktor (dalam hal ini stator)
i = Arus (dalam hal ini merupakan arus eksitasi)
0 = permeabilitas bahan konduktor (rotor)
lc = Panjang konduktor (rotor)
Nilai arus eksitasi yang diberikan sebanding dengan nilai fluksi yang
dihasilkan. Karena besar tegangan induksi yang dihasilkan berbanding lurus dengan
fluksi yang diinduksikan rotor maka perubahan eksitasi juga akan berbanding lurus
dengan perubahan tegangan induksi. Hal ini dapat dilihat dari persamaan (3.1) dan
(3.2), sehingga:
Kenaikan IF≈ Kenaikan ≈ Kenaikan E
Pada gambar 3.1.a ditunjukkan motor sinkron mula-mula beroperasi dengan
faktor daya lagging, lalu kemudian arus eksitasinya diperbesar. Bertambahnya arus
eksitasi juga mengakibatkan nilai EA bertambah, tetapi tidak mempengaruhi daya
nyata yang disuplai oleh motor. Untuk lebih memudahkan analisis, tahanan jangkar
Ra diabaikan sementara reaktansi sinkron XS dan tegangan terminal V tetap konstan.
Dari persamaan dibawah dapat dilihat daya perphasa yaitu :
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
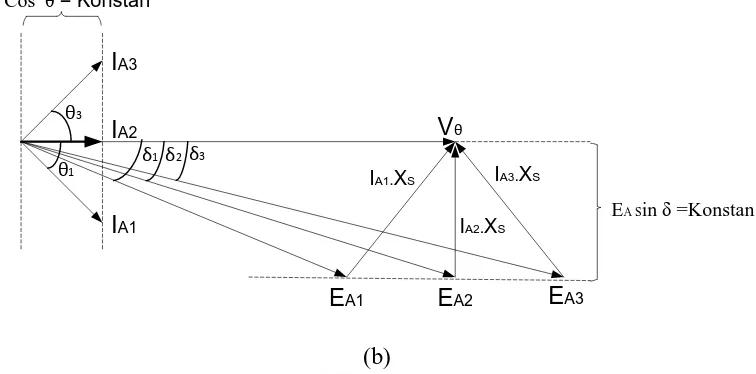
Untuk daya keluaran konstan, EAsinδ dan IA cosθ harus tetap konstan
karena V dan XS juga konstan. Hal ini berarti apabila arus eksitasi divariasikan,
tegangan induksi EA juga bervariasi tetapi komponen EA normal terhadap V yaitu
δ sin
A
E tetap konstan. Karena EA bervariasi, IAXS dan arus jangkar IA juga
bervariasi, dimana IA cosθ tetap konstan.
Saat tegangan induksi adalah EA1, motor dalam keadaan eksitasi kurang dan
arus jangkar IA1 lagging dari V dengan sudut daya θ1. Ketika arus eksitasi
dinaikkan, tegangan induksi meningkat menjadi EA2, sudut kopel akan berkurang dari
1
δ menjadiδ2 sehingga EA1 sinδ1= EA2 sin 2 dan fasor arus IA1 akan menjadi IA2,
dan motor beroperasi pada faktor daya unity seperti pada gambar 3.1.b.
Ketika eksitasi dinaikkan lagi, tegangan induksi EA2 akan bertambah menjadi
EA3, sudut kopel beban berkurang dari 2 menjadi 3 sehingga EA3 Sin 3 = EA2Sin 2
= EA1 Sin 1. Fasor arus IA2 berubah menjadi IA3 yang leading terhadap V seperti
gambar 3.1.b dan sekarang motor beroperasi pada faktor daya leading. Dengan
catatan bahwa komponen daya aktif dari arus jangkar adalah sama yaitu IA1 cos 1 =
IA
V
EA
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
(b)
Gambar 3.1 (a) Operasi Motor Sinkron Pada Cos Lagging (Ra diabaikan) (b) Pengaruh Bertambahnya Arus Eksitasi Pada
Operasi Motor Sinkron (Ra diabaikan)
Oleh karena itu, dengan mengontrol arus eksitasi pada motor sinkron, daya
reaktif yang disuplai atau dikonsumsi dari sistem daya akan dapat dikontrol. Bila
proyeksi dari fasor EA ke V , (EAcos ), lebih pendek dari V itu sendiri, maka motor
akan mempunyai arus lagging dan mengkonsumsi daya reaktif Q. Bila arus eksitasi
lebih kecil dari situasi ini, maka motor disebut eksitasi kurang (under excited) atau
dengan kata lain bila proyeksi EA terhadap V , lebih panjang dari V , itu sendiri,
motor sinkron memiliki arus leading dan mensuplai daya reaktif Q ke sistem daya.
Jadi bila arus medan lebih besar dari situasi ini, maka motor sinkron disebut eksitasi
lebih (over excited). Diagram fasor dari konsep ini diilustrasikan oleh gambar
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
IA
V
EA
EA sin V
(a)
V IA
EA
EA sin V
(b)
Gambar 3.2. (a). Diagram Fasor Motor Sinkron Eksitasi Kurang
(b). Diagram Fasor Motor Sinkron Eksitasi Lebih
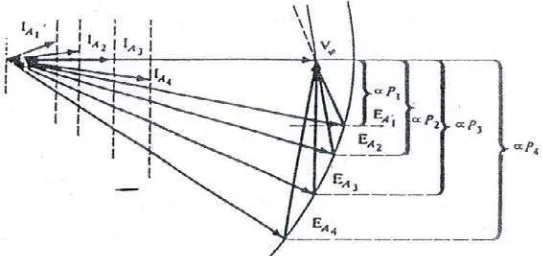
3.2.1. Karakteristik Kurva V Motor Sinkron (IA = f(IF))
Besarnya arus jangkar untuk suatu beban tertentu bervariasi dengan
perubahan arus eksitasi atau IA = f(IF), ditunjukkan dalam bentuk kurva v pada
gambar 3.3. Karena bentuknya menyerupai huruf v, maka dinamakan sebagai kurva
v motor sinkron. Pada gambar dibawah dapat digambarkan beberapa kurva v yang
dibedakan berdasarkan level daya nyatanya. Untuk arus eksitasi yang lebih kecil dari
harga minimum IA, arus jangkar akan lagging dan mengkonsumsi daya reaktif .
Untuk arus eksitasi lebih besar dari harga minimum IA, arus jangkar akan leading dan
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
3.2.2. Karakteristik Kurva V Invers Motor Sinkron (Cos = f(IF))
Untuk daya yang konstan, jika faktor daya digambarkan sebagai fungsi arus
ek sitasi atau Cos = f(IF) maka akan diperoleh kurva. Karena bentuknya
terbalik/berlawanan dengan kurva v maka kurva ini dinamakan kurva v invers motor
sinkron. Pada gambar 3.4. ditunjukkan beberapa kurva v invers yang dibedakan
berdasarkan level daya nyatanya. Kurva mencapai nilai maksimum sama dengan satu
pada harga arus eksitai IF tertentu.
Gambar 3.4. Kurva V Invers Motor Sinkron Gambar 3.3. Kurva V Motor Sinkron
Cos (PF)
IF (A)
PF
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
BAB IV
ANALISA PENGARUH PERUBAHAN ARUS EKSITASI TERHADAP ARUS JANGKAR DAN FAKTOR DAYA
MOTOR SINKRON TIGA FASA
4.1. Umum
Motor sinkron tiga fasa adalah mesin listrik arus bolak-balik (AC) yang
banyak digunakan untuk melayani beban mekanik yang membutuhkan putaran
konstan dan perbaikan faktor daya sistem. Dalam berbagai kondisi operasinya,
perilaku motor sinkron dipengaruhi oleh pengaturan atau perubahan eksitasi dari
medan rotornya. Pengaruh perubahan arus eksitasi terhadap arus jangkar dan faktor
daya untuk daya yang konstan dapat ditunjukkan dalam bentuk diagram fasor, kurva
v (v curve) serta kurva v invers (inverted v curve) motor sinkron.
Penelitian ini dilakukan dengan cara melakukan pengujian dan mengambil
data di Labotatorium Konversi Energi Listrik Departemen Teknik Elektro
Universitas Sumatera Utara.
4.2. Peralatan Yang Digunakan
Peralatan yang digunakan dalam penelitian ini adalah :
1. Motor sinkron tiga fasa Tipe 72SA
P = 5 KW
Cos = 0,8
Jumlah kutub = 4
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Tegangan terminal = 400 Volt
Arus = 9 Amp
Kelas Isolasi
• Stator = E
• Rotor = E
Tegangan Eksitasi = 44 Volt DC
Arus eksitasi = 5,7 Amp
Frekwensi = 50 Hz
N = 1500 rpm
2. Motor Induksi Tiga Fasa Tipe VZ 132M4 (Penggerak mula)
P = 7,5 KW
Cos = 0,82
Jumlah Kutub = 4
IP = 44
Kelas rotor = D (rotor sangkar)
Belitan = Y / ∆
Tegangan = 380 / 220 Volt
Arus = 16,5 / 28,5 Amp
3. 2 Unit Power Suplai AC
4. 1 Unit Power Suplai DC
5. Multimeter LCR
6. Amperemeter Tipe 4539-A
7. Portable Polyphase Wattmeter Tipe 2042
8. Portable Power Faktor Meter Tipe 2039
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 4.1. Rangkaian Pengujian Beban Nol Mesin Sinkron
4.3. Menentukan Reaktansi Mesin Sinkron Tiga Fasa
Untuk menentukan reaktansi dari mesin sinkron maka dilakukan pengujian
berikut, dimana pada kondisi ini mesin sinkron dioperasikan sebagai generator.
4.3.1. Pengujian Beban Nol Mesin Sinkron (Dioperasikan Sebagai Generator) a. Rangkaian Pengujian
M
1. Peralatan disusun dan dirangkai sesuai dengan gambar 4.1 di atas.
2. Saklar S1, S2 dan dalam posisi terbuka dan sumber tegangan dalam
keadaan minimum.
3. Saklar S1 ditutup dan atur PTAC sampai motor induksi memutar rotor
mesin sinkron dengan kecepatan sinkron 1500 rpm.
4. PTDC di-nyalakan dengan menutup Saklar S2,dan melalui PTDC, arus
eksitasi (A) bertahap dinaikkan hingga diperoleh pembacaan tegangan
terminal (V).
5. Untuk tiap kenaikan arus eksitasi, dicatat perubahan tegangan
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
6. PTDC diminimumkan, saklar S2 dibuka, kemudian PTAC
diminimumkan lalu saklar S1 dibuka.
7. Pengujian selesai.
c. Data Hasil Pengujian
N =1500 rpm
Tabel 4.1 Data Hasil Pengujian Beban Nol Mesin Sinkron
No IF (A) EA (Volt)
d. Grafik Hasil Pengujian
Pada pengujian beban nol mesin sinkron sebagai generator dapat dilihat
bahwa kenaikan tegangan terminal EA tidak linier terhadap kenaikan arus eksitasi IF
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 4.2. Grafik Pengujian Beban Nol Mesin Sinkron
Gambar 4.3. Rangkaian Pengujian Hubung Singkat Mesin Sinkron IF (A)
EA (V)
4.3.2. Pengujian Hubung Singkat Mesin Sinkron (Dioperasikan Sebagai Generator)
a. Rangkaian Pengujian
U
1. Peralatan dirangkaian seperti gambar 4.3 dengan semua saklar terbuka,
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
2. Saklar S2 ditutup dan motor induksi (prime mover) dijalankan.
3. Saat If = 0, dicatat pembacaan arus pada amperemeter A2
4. Saklar S2 ditutup. PTDC diatur untuk memberikan arus eksitasi secara
bertahap hingga dicapai arus hubung singkat. Putaran rotor dijaga konstan.
Setiap kenaikan arus eksitasi, arus yang terukur pada ampermeter A2
dicatat.
5. Setelah mencapai arus hubung singkat yang diizinkan, atur PTDC hingga
arus eksitasi yang terukur menjadi nol.
6. PTAC diatur pada posisi minimum dan saklar S1 dibuka. PTDC diatur
pada posisi minimum dan saklar S2 dibuka.
7. Percobaan selesai.
c. Data Hasil Pengujian
No IF (A) Ihs(A)
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
Gambar 4.5. Rangkaian PengukuranTahanan Jangkar Motor Sinkron Gambar 4.4 Grafik Data Hubung Singkat Mesin Sinkron
15 2,8 10,8
16 2,9 11,42
17 3,0 11,8
d. Grafik Hasil Pengujian
Untuk setiap arus medan IF yang diberikan maka diperoleh arus hubung
singkat IHS seperti berikut:
4.3.3 Pengukuran Tahanan Jangkar a. Rangkaian Pengukuran
IHS (A)
IF (A)
ADC
VDC
P T D C S1
RA R
S T
Buhari Tongam Rajagukguk : Pengaruh Perubahan Arus Eksitasi Terhadap Arus Jangkar Dan Faktor Daya Pada Motor Sinkron 3 Fasa (Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU), 2010.
b. Prosedur Pengukuran
1. Peralatan diusun dan dirangkai sesuai gambar 4.5 di atas.
2. PTDC di-nyalakan dengan menutup saklar S1, kemudian atur PTDC
hingga pembacaan pada Amperemeter (ADC) menunjukan nilai nominal
arus jangkar motor atau mendekati nilai nominalnya.
3. Catat pembacaan pada Voltmeter (VDC) dan Amperemeter (ADC).
4. Ulangi prosedur 2 dan 3 untuk tiga kali percobaan.
5. Percobaan selesai.
c. Data Hasil Pengukuran
Tabel 4.3 Data Hasil Pengukuran Tahanan Jangkar
No VDC (Volt) ADC (Ampere)
1 27,50 9
2 27,45 9
3 27,87 9
d. Analisa Hasil Pengukuran
Dari rangkaian pengukuran tahanan jangkar dapat dilihat bahwa ketika saklar
S1 ditutup dan PTDC diatur sesuai dengan prosedur, maka nilai yang terbaca pada
Voltmeter (VDC) dan Amperemeter (ADC) merupakan nilai 2 tahanan belitan seri