BAB 3
METODE PENELITIAN Tempat dan Waktu
Penelitian akan dilaksanakan pada Laboratorium Konversi Energi Listrik Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara pada Bulan Nopember Tahun 2016.
Peralatan yang Digunakan
Untuk mendukung pelaksanaan percobaan pada penelitian ini maka dibutuhkan bahan dan peralatan, antara lain :
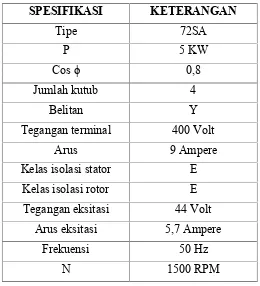
1. Motor sinkron tiga fasa 380 Volt dengan spesifikasi sebagai berikut
Tabel 3.1 Spesifikasi Motor Sinkron
SPESIFIKASI KETERANGAN
Tipe 72SA
P 5 KW
Cos 0,8
Jumlah kutub 4
Belitan Y
Tegangan terminal 400 Volt
Arus 9 Ampere
Kelas isolasi stator E
Kelas isolasi rotor E
Tegangan eksitasi 44 Volt Arus eksitasi 5,7 Ampere
Frekuensi 50 Hz
N 1500 RPM
2. Penggerak mula (Motor Induksi Tiga Fasa) 3. AutoTransformator tiga fasa
4. Power supply DC
5. Beban Induktif (Motor Induksi, Motor Sinkron, Lampu TL) 6. Cos Meter
7. Amperemeter (Tang Ampere) 8. Voltmeter
9. Kabel penghubung.
Variabel yang Diamati
Variabel variabel yang diamati dalam penelitian ini meliputi :
1. Nilai Arus Eksitasi yang disuplai kepada kumparan medan pada motor sinkron.
2. Nilai Faktor Daya pada sistem sebelum motor sinkron dioperasikan. 3. Nilai Faktor Daya pada sistem setelah motor sinkron dioperasikan
dengan nilai arus eksitasi yang berubah-ubah. Prosedur Penelitian
Adapun percobaan yang dilakukan untuk mendapatkan data yang diperlukan dalam penelitian ini adalah sebagai berikut :
1. Percobaan pengujian beban nol mesin sinkron (dioperasikan sebagai generator)
3. Percobaan pengukuran tahanan jangkar mesin sinkron 4. Percobaan pengujian motor sinkron pada sistem
3.4.1 Percobaan Pengujian Beban Nol Mesin Sinkron (Dioperasikan Sebagai Generator)
Alat-alat yang dibutuhkan dalam melakukan percobaan ini adalah sebagai berikut:
1. 1 (satu) unit motor sinkron tiga fasa 380 volt
2. 1 (satu) unit penggerak mula (Motor Induksi Tiga Fasa) 3. 1 (satu) unit power supply tiga fasa 380 volt
4. 1 (satu) unit power supply DC 5. 1 (satu) unit voltmeter
6. 1 (satu) unit amperemeter 7. Kabel penghubung
Adapun prosedur percobaan adalah sebagai berikut :
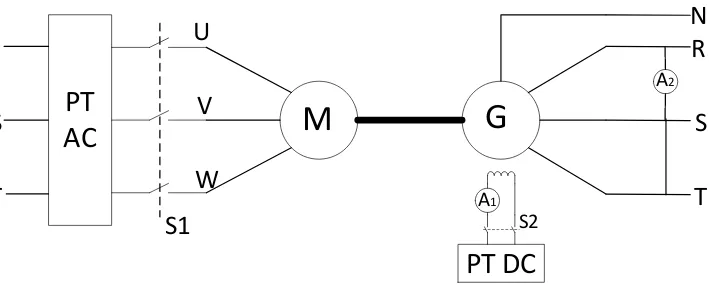
1. Rangkailah rangkaian percobaan seperti pada Gambar 3.1 berikut :
2. Tutup saklar S1, naikkan tegangan sumber sampai motor induksi memutar motor sinkron pada kecepatan sinkron 1500 rpm
3. Tutup saklar S2, kemudian naikkan arus eksitasi (If) secara bertahap hingga diperoleh pembacaan tegangan terminal pada generator (V) 4. Selanjutnya, untuk setiap kenaikan arus eksitasi yang telah
ditentukan, dicatat perubahan nilai tegangan terminal generator dan putaran tetap dijaga konstan
5. Kemudian PTDC diminimumkan dan saklar S2 dibuka, PTAC juga diminimumkan dan saklar S1 dibuka
6. Percobaan selesai.
3.4.2 Percobaan Pengujian Hubung Singkat Mesin Sinkron
Alat-alat yang dibutuhkan dalam melakukan percobaan ini adalah sebagai berikut:
1. 1 (satu) unit motor sinkron tiga fasa 380 volt
2. 1 (satu) unit penggerak mula (Motor Induksi Tiga Fasa) 3. 1 (satu) unit power supply tiga fasa 380 volt
4. 1 (satu) unit power supply DC 5. 2 (dua) unit amperemeter 6. Kabel penghubung
Adapun prosedur percobaan adalah sebagai berikut:
PT
Gambar 3.2 Rangkaian Percobaan Pengujian Hubung Singkat Mesin Sinkron
2. Tutup saklar S1, naikkan tegangan sumber sampai motor induksi memutar motor sinkron pada kecepatan sinkron 1500 rpm
3. Tutup saklar S2, kemudian naikkan arus eksitasi (If) secara bertahap hingga diperoleh pembacaan arus hubung singkat (Isc) pada generator
4. Selanjutnya, untuk setiap kenaikan arus eksitasi yang telah ditentukan, dicatat perubahan nilai arus hubung singkat generator dan putaran tetap dijaga konstan
5. Kemudian PTDC diminimumkan dan saklar S2 dibuka, PTAC juga diminimumkan dan saklar S1 dibuka
6. Percobaan selesai.
3.4.3 Percobaan Pengukuran Tahanan Jangkar Mesin Sinkron
2. 1 (satu) unit power supply DC 3. 1 (satu) unit voltmeter
4. 1 (satu) unit amperemeter 5. Kabel penghubung
Adapun prosedur percobaan adalah sebagai berikut:
1. Rangkailah rangkaian percobaan seperti pada Gambar 3.3 berikut:
Gambar 3.3 Rangkaian Percobaan Pengukuran Tahanan Jangkar Mesin Sinkron 2. Tutup saklar S1, kemudian atur PTDC hingga pembacaan tegangan
3.4.4 Percobaan Pengujian Motor Sinkron Pada Sistem
Alat-alat yang dibutuhkan dalam melakukan percobaan ini adalah sebagai berikut:
1. 1 (satu) unit motor sinkron tiga fasa 380 Volt
2. 1 (satu) unit penggerak mula (Motor Induksi Tiga Fasa) 3. 1 (satu) unit power supply tiga fasa 380 Volt
4. 1 (satu) unit power supply DC 5. 1 (satu) unit cos phi meter 6. 1 (satu) unit voltmeter 7. 1 (satu) unit amperemeter 8. Rangkaian beban
9. Kabel penghubung.
Adapun prosedur percobaan adalah sebagai berikut:
1. Rangkailah rangkaian percobaan seperti pada Gambar 3.4 berikut:
2. Saklar S1, S2, dan S3 dalam posisi terbuka dan sumber tegangan dalam keadaan minimum
3. Atur beban sistem sampai pada nilai arus dan faktor daya yang telah ditentukan
4. Saklar S1 ditutup dan tegangan PTAC dinaikkan sampai tegangan nominal motor induksi sehingga motor sinkron juga berputar pada putaran sinkronnya
5. Kemudian saklar S2 ditutup bersamaan dengan saklar S1 dibuka, sehingga motor sinkron telah berputar sendiri dengan kecepatan sinkronnya
6. Kemudian saklar S3 ditutup dan PTDC diatur arusnya secara bertahap sesuai dengan nilai yang telah ditentukan
7. Catat perubahan nilai Arus Eksitasi, VDC, Cos Phi, Arus Beban, dan Arus Motor pada setiap perubahan nilai arus eksitasi
8. Kemudian PTDC diminimumkan dan semua saklar dibuka
9. Ulangi langkah 2-8 untuk nilai beban dan faktor daya yang berbeda yang telah ditentukan sebelumnya
Pelaksanaan Penelitian 3.5.1 Proses Pengumpulan Data
Adapun diagram alur dari proses pengambilan data terlihat pada gambar berikut:
Adapun teknik perhitungan dan pengolahan dapat dilakukan dengan langkah-langkah berikut :
1. Menentukan dan mencatat besar beban yang ada pada sistem, dimana akan ditentukan beberapa nilai beban untuk melihat pengaruh satu motor sinkron pada besar beban yang berbeda-beda (dalam VA)
2. Menentukan dan mencatat nilai Cos beban yang diinginkan sebelum dan sesudah pengoperasian motor sinkron
3. Melakukan instalasi beban dan motor sinkron pada sistem
4. Mengoperasikan motor sinkron dengan metode starting menggunakan penggerak mula berupa motor induksi
5. Menaikkan dan mencatat nilai Arus Eksitasi motor sinkron, dan mencatat nilai perubahan Cos pada sistem pada setiap perubahan nilai eksitasi
6. Mengubah besar nilai beban pada sistem, dan ulangi langkah no. 5 7. Mencatat dan Mengumpulkan semua data percobaan
8. Menganalisa dan membandingkan nilai Cos pada sistem pada setiap perubahan arus eksitasi, dengan besar nilai beban yang berbeda-beda 9. Menarik Kesimpulan.
3.5.2 Melakukan Analisis Data
BAB 4
HASIL PENELITIAN DAN PEMBAHASAN
Data Percobaan
Dari hasil penelitian di Laboratorium Konversi Energi Listrik FT-USU diperoleh data pengujian yang akan dipaparkan pada subbab dibawah ini.
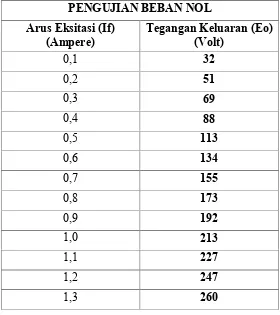
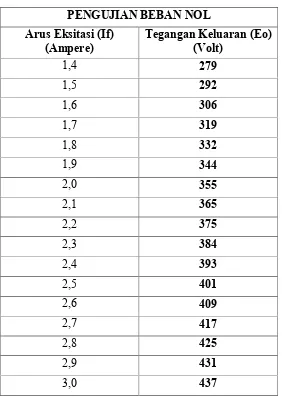
4.1.1 Percobaan Pengujian Beban Nol Mesin Sinkron
Data yang diperoleh melalui hasil percobaan pengujian beban nol mesin sinkron dapat dilihat pada Tabel 4.1 dibawah ini:
Tabel 4.1 Data Hasil Percobaan Pengujian Beban Nol Mesin Sinkron
PENGUJIAN BEBAN NOL Arus Eksitasi (If)
(Ampere)
PENGUJIAN BEBAN NOL Arus Eksitasi (If)
(Ampere)
Tegangan Keluaran (Eo) (Volt)
4.1.2 Percobaan Pengujian Hubung Singkat Mesin Sinkron
Data yang diperoleh melalui hasil percobaan pengujian hubung singkat mesin sinkron dapat dilihat pada Tabel 4.2 dibawah ini:
Tabel 4.2 Data Hasil Percobaan Pengujian Hubung Singkat Mesin Sinkron
PENGUJIAN HUBUNG SINGKAT Arus Eksitasi (If)
(Ampere)
PENGUJIAN HUBUNG SINGKAT Arus Eksitasi (If)
(Ampere)
Arus Hubung Singkat (Isc) (Ampere)
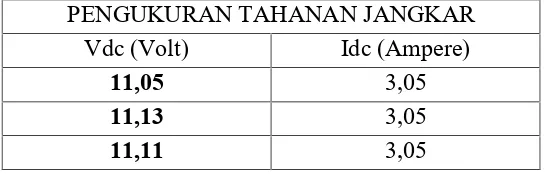
4.1.3 Percobaan Pengukuran Tahanan Jangkar Mesin Sinkron
Tabel 4.3 Data Hasil Percobaan Pengukuran Tahanan Jangkar Mesin Sinkron PENGUKURAN TAHANAN JANGKAR
Vdc (Volt) Idc (Ampere)
11,05 3,05
11,13 3,05
11,11 3,05
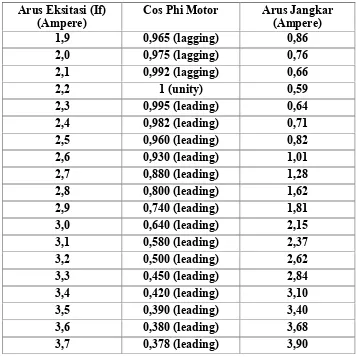
4.1.4 Percobaan Pengaruh Arus Eksitasi Terhadap Cos Phi dan Arus Jangkar Motor Beban Nol
Data yang diperoleh melalui hasil percobaan motor sinkron pada sistem dapat dilihat pada Tabel 4.4 dibawah ini:
Tabel 4.4 Data Hasil Percobaan Pengaruh Arus Eksitasi Terhadap Cos Phi dan Arus Jangkar Motor Beban Nol
Arus Eksitasi (If)
(Ampere) Cos Phi Motor
Arus Jangkar (Ampere)
0,1 0,250 (lagging) 5,70
0,2 0,260 (lagging) 5,43
0,3 0,275 (lagging) 5,15
0,4 0,290 (lagging) 4,88
0,5 0,300 (lagging) 4,57
0,6 0,320 (lagging) 4,33
0,7 0,340 (lagging) 3,94
0,8 0,360 (lagging) 3,68
0,9 0,380 (lagging) 3,40
1,0 0,410 (lagging) 3,28
1,1 0,470 (lagging) 2,82
1,2 0,530 (lagging) 2,60
1,3 0,590 (lagging) 2,30
1,4 0,640 (lagging) 2,13
1,5 0,700 (lagging) 1,99
1,6 0,800 (lagging) 1,64
1,7 0,880 (lagging) 1,30
Arus Eksitasi (If) (Ampere)
Cos Phi Motor Arus Jangkar (Ampere)
1,9 0,965 (lagging) 0,86
2,0 0,975 (lagging) 0,76
2,1 0,992 (lagging) 0,66
2,2 1 (unity) 0,59
2,3 0,995 (leading) 0,64
2,4 0,982 (leading) 0,71
2,5 0,960 (leading) 0,82
2,6 0,930 (leading) 1,01
2,7 0,880 (leading) 1,28
2,8 0,800 (leading) 1,62
2,9 0,740 (leading) 1,81
3,0 0,640 (leading) 2,15
3,1 0,580 (leading) 2,37
3,2 0,500 (leading) 2,62
3,3 0,450 (leading) 2,84
3,4 0,420 (leading) 3,10
3,5 0,390 (leading) 3,40
3,6 0,380 (leading) 3,68
3,7 0,378 (leading) 3,90
4.1.5 Percobaan Pengujian Motor Sinkron Pada Sistem
Data yang diperoleh melalui hasil percobaan motor sinkron pada sistem dapat dilihat pada Tabel 4.5 dibawah ini:
Tabel 4.5 Tabel Data Hasil Percobaan Pengujian Motor Sinkron Pada Sistem Berbeban 3000VA
0,2 0,320 9,36 5,23 4,13
0,4 0,330 8,84 4,71 4,13
0,6 0,340 8,29 4,10 4,19
Arus Eksitasi
1,0 0,375 7,31 3,05 4,26
1,2 0,395 6,78 2,45 4,33
1,4 0,422 6,23 1,88 4,35
1,6 0,442 5,63 1,39 4,24
1,8 0,482 5,33 0,86 4,47
2,0 0,520 4,98 0,69 4,29
2,2 0,560 4,68 0,80 3,88
2,4 0,610 4,48 1,08 3,40
2,6 0,680 4,45 1,42 3,03
2,8 0,730 4,61 2,02 2,59
3,0 0,770 4,66 2,49 2,17
3,2 0,840 4,89 3,10 1,79
3,4 0,880 5,15 3,60 1,55
3,6 0,920 5,39 4,30 1,09
3,8 0,945 5,85 4,90 0,95
4,0 0,960 6,27 5,39 0,88
4,2 0,975 6,77 6,02 0,75
4,4 0,980 7,32 6,65 0,67
4,6 0,985 8,13 7,24 0,89
4,8 0,988 8,65 7,90 0,75
Tabel 4.6 Tabel Data Hasil Percobaan Pengujian Motor Sinkron Pada Sistem Berbeban 6000VA
0,2 0,382 14,10 5,38 8,72
0,4 0,390 13,62 4,83 8,79
0,6 0,400 13,12 4,31 8,81
0,8 0,418 12,53 3,70 8,83
1,0 0,430 11,99 3,09 8,90
1,2 0,442 11,49 2,54 8,95
1,4 0,460 10,98 2,05 8,93
1,6 0,478 10,62 1,54 9,08
Arus Eksitasi
1,8 0,490 10,18 1,01 9,17
2,0 0,510 9,67 0,44 9,23
2,2 0,528 9,30 0,28 9,02
2,4 0,542 9,12 0,91 8,21
2,6 0,564 8,74 1,16 7,58
2,8 0,590 8,55 1,76 6,79
3,0 0,608 8,52 2,28 6,24
3,2 0,620 8,53 2,90 5,63
3,4 0,642 8,65 3,66 4,99
3,6 0,660 8,80 4,14 4,66
3,8 0,678 9,15 4,63 4,52
4,0 0,696 9,36 5,29 4,07
4,2 0,718 9,83 5,90 3,93
4,4 0,738 10,29 6,56 3,73
4,6 0,760 10,60 7,15 3,45
4,8 0,782 11,15 7,80 3,35
5,0 0,820 11,76 8,52 3,24
Tabel 4.7 Tabel Data Hasil Percobaan Pengujian Motor Sinkron Pada Sistem Berbeban 9000VA
0,2 0,420 20,8 5,45 15,35
0,4 0,425 20,3 4,91 15,39
0,6 0,430 19,9 4,43 15,47
0,8 0,440 19,4 3,90 15,50
1,0 0,450 18,8 3,24 15,56
1,2 0,455 18,4 2,79 15,61
1,4 0,464 17,8 2,25 15,55
1,6 0,478 17,3 1,68 15,62
1,8 0,490 16,6 1,15 15,45
2,0 0,500 16,0 0,74 15,26
Arus Eksitasi
2,2 0,510 15,8 0,36 15,44
2,4 0,525 15,2 0,54 14,66
2,6 0,540 14,8 1,00 13,80
2,8 0,560 13,8 1,65 12,15
3,0 0,575 13,6 2,01 11,59
3,2 0,590 13,5 2,64 10,86
3,4 0,600 13,4 3,40 10,00
3,6 0,620 13,3 3,71 9,59
3,8 0,630 12,8 4,40 8,40
4,0 0,640 12,3 5,12 7,18
4,2 0,650 12,6 5,56 7,04
4,4 0,660 12,7 6,40 6,30
4,6 0,675 13,0 7,00 6,00
4,8 0,690 13,6 7,50 6,10
5,0 0,710 14,2 8,11 6,09
Analisa Data
1. Tahanan Jangkar Motor Sinkron
Maka, nilai rata-rata Ra adalah
=1,811 + 1,824 + 1,821
3 = 1,818
Pada saat kondisi kerja biasanya tahanan Ra bertambah akibat adanya efek kulit. Ra efektif adalah 1,1 kali harga Ra pada arus searah.
Ra efektif = 1,1 x 1,818 = 1,999
2. Perhitungan Reaktansi Sinkron (Xs)
Dari pengujian beban nol dan hubung singkat mesin sinkron maka impedansi sinkron untuk tiap-tiap arus eksitasi adalah sebagai berikut :
= 3
Maka nilai Xs dapat dihitung
=
Tabel 4.8 Data Hasil Perhitungan Reaktansi Sinkron
No. If (A) Zs ( ) Xs ( )
No. If (A) Zs ( ) Xs ( )
12 1,2 39,61 39,56
13 1,3 38,49 38,44
14 1,4 38,44 38,39
15 1,5 37,38 37,33
16 1,6 36,81 36,75
17 1,7 35,97 35,92
18 1,8 35,43 35,37
19 1,9 34,97 34,91
20 2,0 34,10 34,04
21 2,1 33,40 33,34
22 2,2 32,70 32,64
23 2,3 32,13 32,07
24 2,4 31,43 31,36
25 2,5 30,91 30,85
26 2,6 30,35 30,29
27 2,7 29,83 29,77
28 2,8 29,11 29,04
29 2,9 28,57 28,50
30 3,0 28,10 28,02
Nilai rata-rata
= + +. . . +
30
=1070,68
30 = 35,69
3. Perhitungan Daya Aktif dan Daya Reaktif Sistem
Dari data hasil percobaan pengujian motor sinkron pada sistem maka dapat dihitung besar nilai daya aktif dan daya reaktif pada sistem yaitu sebagai berikut :
= 3 × × ×
= 3 × × ×
Tabel 4.9 Data Hasil Perhitungan Daya Aktif dan Daya Reaktif Sistem Berbeban
1 0,2 4,13 0,320 869,85 0,95 2575,35
2 0,4 4,13 0,330 897,03 0,94 2566,00
3 0,6 4,19 0,340 937,64 0,94 2593,48
4 0,8 4,24 0,360 1004,64 0,93 2603,57
5 1 4,26 0,375 1051,44 0,93 2599,23
6 1,2 4,33 0,395 1125,72 0,92 2618,16
7 1,4 4,35 0,422 1208,22 0,91 2595,66
8 1,6 4,24 0,442 1233,48 0,90 2503,28
9 1,8 4,47 0,482 1418,07 0,88 2577,75
10 2 4,29 0,520 1468,27 0,85 2411,81
11 2,2 3,88 0,560 1430,09 0,83 2115,75
12 2,4 3,40 0,610 1365,06 0,79 1773,24
13 2,6 3,03 0,680 1356,11 0,73 1462,23
14 2,8 2,59 0,730 1244,42 0,68 1165,06
15 3 2,17 0,770 1099,75 0,64 911,29
16 3,2 1,79 0,840 989,64 0,54 639,24
17 3,4 1,55 0,880 897,76 0,47 484,56
18 3,6 1,09 0,920 660,02 0,39 281,17
19 3,8 0,95 0,945 590,88 0,33 204,51
20 4 0,88 0,960 556,03 0,28 162,18
21 4,2 0,75 0,975 481,29 0,22 109,69
22 4,4 0,67 0,980 432,16 0,20 87,75
23 4,6 0,89 0,985 576,99 0,17 101,08
Tabel 4.10 Data Hasil Perhitungan Daya Aktif dan Daya Reaktif Sistem Berbeban
1 0,2 8,72 0,382 2192,42 0,92 5304,07
2 0,4 8,79 0,390 2256,30 0,92 5327,28
3 0,6 8,81 0,400 2319,42 0,92 5314,47
4 0,8 8,83 0,418 2429,30 0,91 5279,64
5 1 8,90 0,430 2518,85 0,90 5288,59
6 1,2 8,95 0,442 2603,69 0,90 5284,05
7 1,4 8,93 0,460 2703,67 0,89 5218,78
8 1,6 9,08 0,478 2856,66 0,88 5249,31
9 1,8 9,17 0,490 2957,40 0,87 5261,28
10 2 9,23 0,510 3098,25 0,86 5225,56
11 2,2 9,02 0,528 3134,62 0,85 5041,77
12 2,4 8,21 0,542 2928,78 0,84 4541,11
13 2,6 7,58 0,564 2813,80 0,83 4119,79
14 2,8 6,79 0,590 2636,73 0,81 3608,32
15 3 6,24 0,608 2497,08 0,79 3260,73
16 3,2 5,63 0,620 2297,44 0,78 2907,38
17 3,4 4,99 0,642 2108,53 0,77 2518,10
18 3,6 4,66 0,660 2024,30 0,75 2304,22
19 3,8 4,52 0,678 2017,03 0,74 2186,79
20 4 4,07 0,696 1864,44 0,72 1923,48
21 4,2 3,93 0,718 1857,21 0,70 1800,42
22 4,4 3,73 0,738 1811,80 0,67 1656,64
23 4,6 3,45 0,760 1725,75 0,65 1475,79
24 4,8 3,35 0,782 1724,23 0,62 1374,27
Tabel 4.11 Data Hasil Perhitungan Daya Aktif dan Daya Reaktif Sistem Berbeban
1 0,2 15,35 0,420 4243,28 0,91 9168,76
2 0,4 15,39 0,425 4304,99 0,91 9169,05
3 0,6 15,47 0,430 4378,27 0,90 9192,63
4 0,8 15,50 0,440 4488,78 0,90 9161,18
5 1 15,56 0,450 4608,57 0,89 9145,75
6 1,2 15,61 0,455 4674,75 0,89 9149,07
7 1,4 15,55 0,464 4748,90 0,89 9066,25
8 1,6 15,62 0,478 4914,20 0,88 9030,21
9 1,8 15,45 0,490 4982,75 0,87 8864,43
10 2 15,26 0,500 5021,91 0,87 8698,20
11 2,2 15,44 0,510 5182,77 0,86 8741,34
12 2,4 14,66 0,525 5065,68 0,85 8212,21
13 2,6 13,80 0,540 4904,75 0,84 7644,74
14 2,8 12,15 0,560 4478,25 0,83 6625,35
15 3 11,59 0,575 4386,27 0,82 6241,12
16 3,2 10,86 0,590 4217,22 0,81 5771,18
17 3,4 10,00 0,600 3949,08 0,80 5265,43
18 3,6 9,59 0,620 3913,40 0,78 4952,36
19 3,8 8,40 0,630 3483,08 0,78 4293,57
20 4 7,18 0,640 3024,47 0,77 3631,13
21 4,2 7,04 0,650 3011,83 0,76 3521,22
22 4,4 6,30 0,660 2736,71 0,75 3115,15
23 4,6 6,00 0,675 2665,63 0,74 2913,70
24 4,8 6,10 0,690 2770,28 0,72 2906,02
Dari hasil perhitungan diatas dapat kita ketahui besar daya reaktif yang disuplai motor sinkron untuk sistem yaitu :
Untuk Beban 3000VA
=
= , , = ,
Untuk Beban 6000VA
=
= , , = ,
Untuk Beban 9000VA
=
Grafik
1. Grafik Arus Eksitasi vs Tegangan pada percobaan pengujian beban nol
Gambar 4.1 Grafik Arus Eksitasi vs Tegangan pada percobaan pengujian beban nol 0
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Tegangan
Gambar 4.2 Grafik Arus Eksitasi vs Arus Hubung Singkat pada percobaan pengujian hubung singkat
2. Grafik Arus Eksitasi vs Arus Hubung Singkat pada percobaan pengujian hubung singkat
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Arus Hubung Singkat
3. Grafik Arus Eksitasi vs Cos Phi Motor Beban Nol
Gambar 4.3 Grafik Arus Eksitasi vs Cos Phi Motor Beban Nol 0
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Cos Phi Motor Beban Nol
4. Grafik Arus Eksitasi vs Arus Jangkar Motor Beban Nol
Gambar 4.4 Grafik Arus Eksitasi vs Arus Jangkar Motor Beban Nol 0
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Arus Jangkar Motor Beban Nol
5. Grafik Arus Eksitasi vs Arus Beban Total pada pengujian motor sinkron pada sistem
Gambar 4.5 Grafik Arus Eksitasi vs Arus Beban Total pada pengujian motor 0
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Arus Beban Total
6. Grafik Arus Eksitasi vs Arus Beban pada pengujian motor sinkron pada sistem
Gambar 4.6 Grafik Arus Eksitasi vs Arus Beban pada pengujian motor sinkron pada sistem
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Arus Beban
7. Grafik Arus Eksitasi vs Cos Phi (Grafik V Invers) pada pengujian motor sinkron pada sistem
Gambar 4.7 Grafik Arus Eksitasi vs Cos Phi (Grafik V Invers) pada pengujian 0
Arus Eksitasi (Ampere)
Grafik Arus Eksitasi vs Cos Phi
BAB 5
KESIMPULAN DAN SARAN
Kesimpulan
Berdasarkan hasil penelitian dan pembahasan yang dilakukan, diperoleh beberapa kesimpulan sebagai berikut:
1. Nilai faktor daya sistem berubah terus menjadi semakin tinggi atau mendekati satu saat arus eksitasi motor sinkron terus dinaikkan. Semakin besar beban sistem maka pengaruh pengaturan arus eksitasi terhadap perubahan faktor daya sistem akan semakin mengecil. Saat If = 4,0 A diperolah faktor daya pada beban 3000VA = 0.960 lagging; pada beban 6000VA = 0,696 lagging; pada beban 9000VA = 0,640 lagging.
2. Saat arus eksitasi motor sinkron berada dibawah nilai nominalnya motor sinkron belum berperan memperbaiki faktor daya sistem, namun saat arus eksitasi motor melebihi arus nominalnya yaitu If = 2,2 Ampere, maka motor sinkron telah bekerja memperbaiki faktor daya sistem, hal ini dapat dilihat dari data hasil percobaan bahwa arus beban menurun saat motor sinkron telah bekerja pada faktor daya leading.
3. Dari hasil perhitungan didapat bahwa motor sinkron mampu menyuplai daya reaktif untuk sistem sebesar , pada beban 3000VA;
, pada beban 6000VA; dan , pada beban 9000VA.
Saran
Adapun saran dari penulis sebagai pengembangan dari tugas akhir ini adalah sebagai berikut:
1. Melakukan penelitian untuk membandingkan penggunaan motor sinkron dengan kapasitor dalam memperbaiki faktor daya sistem.
2. Melakukan penelitian dengan motor pada keadaan berbeban
3. Melakukan penelitian pada sistem dengan kapasitas beban yang lebih besar dan berubah-ubah