DAFTAR PUSTAKA
Warsani, Hengki. 2003. Kajian Pemanfaatan Lahan Sawah. Repository: Upi
Eko putro, Agfianto. 2003. Belajar Mikrokontroler. Yogyakarta : Penerbit Gava Media.
Indonesia, Perpustakaan Nasional RI. 1992. Pedoman Umum Penyelenggaraan
Perpustakaan Umum. Jakarta : Perpustakaan Nasional RI.
Lasa HS. 2005. Manajemen Perpustakaan. Yogyakarta : Gama Media.
Millman, Halkias. 1997. Elektronika Terpadu. Jakarta : Erlangga.
Sukmadinata, N.S. 2006. Metode Penelitian Tindakan. Bandung : Remaja Rosda Karya.
BAB III
METODE PENELITIAN
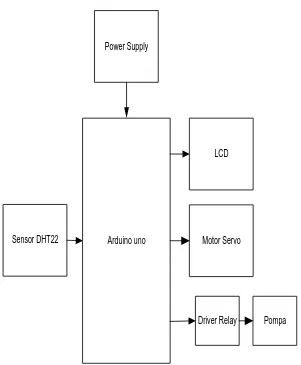
3.1. Diagram Blok Rangkaian
Arduino uno Sensor DHT22
Power Supply
LCD
Driver Relay Pompa Motor Servo
3.1.1. Fungsi-fungsi Diagram Blok
1. Blok Sensor DHT22 sebagai pendeteksi suhu dan kelembaban 2. Blok Supply sebagai sumber tegangan ke mikrokontroler dan sensor 3. Blok LCD sebagai tampilan suihu dan kelembaban
4. Block arduino uno sebagai otak dari system yang memproses data dari sensor
5. Blok Driver relay sebagai penggerak relay
6. Blok pompa sebagai penghisap air dan disemprotkan pada tanaman 7. Blok motor servo sebagai pengusir hama tikus dan burung
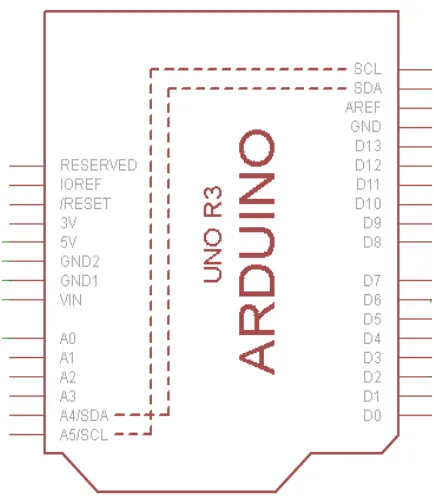
3.2. Rangkaian Arduino Uno
Arduino Uno adalah papan sirkuit berbasis mikrokontroler ATmega328. IC (integrated circuit) ini memiliki 14 input/output digital (6 output untuk PWM), 6 analog input, resonator kristal keramik 16 MHz, Koneksi USB, soket adaptor, pin header ICSP, dan tombol reset. Hal inilah yang dibutuhkan untuk mensupport mikrokontrol secara mudah terhubung dengan kabel power USB atau kabel power supply adaptor AC ke DC atau juga battery.
Arduino Uno berbeda dari semua board mikrokontrol diawal-awal yang tidak menggunakan chip khusus driver FTDI USB-to-serial. Sebagai penggantinya penerapan USB-to-serial adalah ATmega16U2 versi R2 (versi sebelumnya ATmega8U2). Versi Arduino Uno Rev.2 dilengkapi resistor ke 8U2 ke garis ground yang lebih mudah diberikan ke mode DFU.
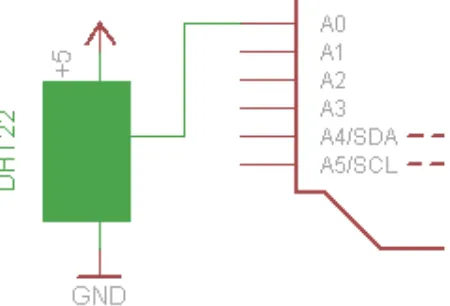
3.3. Rangkaian Sensor DHT22
Gambar 3.3 Rangkaian sensor DHT22
secara akurat dengan kompensasi suhu di ruang penyesuaian dengan nilai koefisien kalibrasi tersimpan dalam memori OTP terpadu (DHT-22 lebih akurat dan presisi dibanding DHT-11), Mampu mentransmisikan sinyal keluaran melewati kabel yang panjang (hingga 20 meter) sehingga cocok untuk ditempatkan di mana saja. Catatan: bila menggunakan kabel yang panjang (di atas 2 meter), tambahkan buffer capacitor 0,33µF antara pin#1 (VCC) dengan pin#4 (GND).
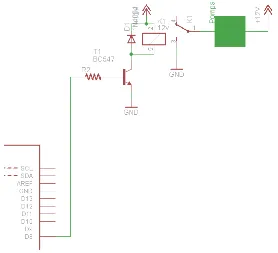
3.4. Rangkaian Driver Relay dan Pompa
Gambar 3.4 Rangkaian Driver relay dan pompa
Ketika basis diberikan supply maka colektor dan emitter dalam keadaan satu rasi. Sehingga relay hidup dan menutup katupnya. Diode berfungsi sebagai menghidari arus balik.
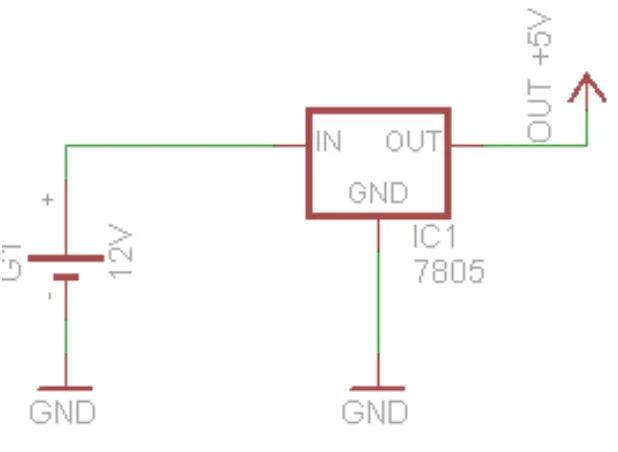
3.5. Rangkaian Power Supply
Gambar 3.5. Rangkaian Power supply
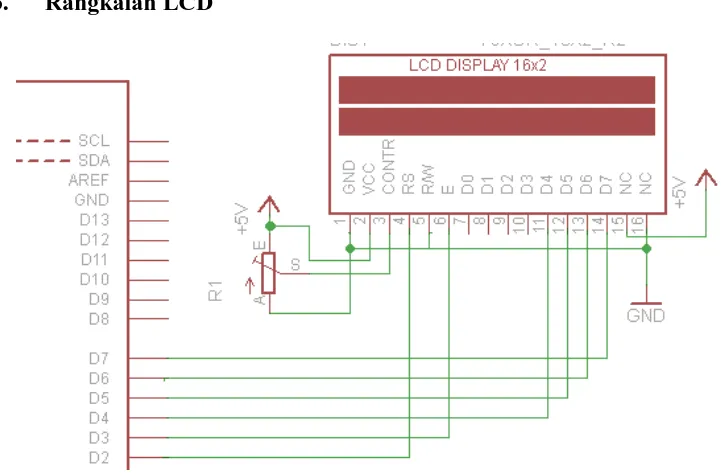
3.6. Rangkaian LCD
Gambar 3.6 Rangkaian LCD 16 x 2
Pada rangkaian ini LCD di hubungkan ke PORT arduino, RS LCD – D2 arduino, E LCD –D3 arduino, D4 LCD –D4 arduino, D5 LCD -D5 arduino, D6 LCD –D6 arduino, D7 LCD –D7 arduino. Rangkaian LCD ini disesuaikan dengna kebutuhan LCD dan kebutuhan pada sistem. Semua port LCD juga dapat langsung dihubungkan ke PORT arduino, tetapu terlalu banyak memakan pin pada arduino.
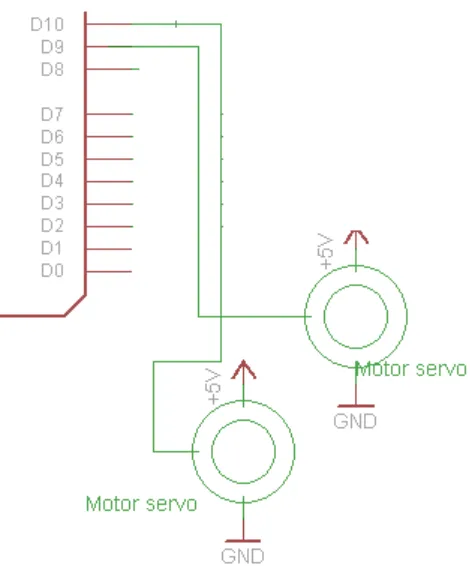
3.7. Rangkaian Motor Servo
Apabila pulse yang digunakan dikirim setiap 25-50 milliseconds maka servo akan bergerak dengan sangat halus.
BAB IV
HASIL DAN PEMBAHASAN
4.1. Pengujian Rangkaian Arduino Uno
Pengujian sistem arduino uno dilakukan dengan memprogram sistem arduino uno untuk membuat Pin.4 menjadi nilai positif negative 0 dan 1 yang diulang ulang dengan delay 100 ms. kemudian keluaran tegangan dari Pin.4 akan diukur dengan avometer.
Pengujian sistem arduino uno ini untuk memastikan bahwa sistem arduino yang digunakan pada penelitian ini tidak rusak. Sehingga program yang ditanamkan pada microcontroller mampu untuk mengontrol suhu dan kelembaban ruang seperti yang diharapkan.
Untuk pengujian arduino dapat digunaka program standar sebagai berikut
void setup() {
pada arduino, akan terlihat led akan hidup dan mati selama 1 detik dan berulang ulang. Pengujian ini bertujuan untuk mengertahui arduino dapat digunakan dengan baik atau tidak.
4.2. Pengujian Rangkaian Sensor DHT22
Pengujian sensor DHT22 dilakukan di beberapa tempat yang berbeda dengan tujuan untuk mengetahui tingkat sensitifitas dan respone sensor. Sebelum melakukan pengujian, sensor sudah terhubung dengan arduino yang akan membaca keluaran sensor yang sudah terkalibrasi dalam derajat Celcius (°C). Berikut program untuk pengujian DHT22
#include <DHT22.h>
// Only used for sprintf
#include <stdio.h>
// Data wire is plugged into port 7 on the Arduino
errorCode =myDHT22.readData();
sprintf(buf, "Integer-only reading: Temperature
break;
case DHT_ERROR_NOT_PRESENT:
Serial.println("Not Present ");
break;
case DHT_ERROR_ACK_TOO_LONG:
Serial.println("ACK time out ");
break;
case DHT_ERROR_SYNC_TIMEOUT:
Serial.println("Sync Timeout ");
break;
case DHT_ERROR_DATA_TIMEOUT:
Serial.println("Data Timeout ");
break;
case DHT_ERROR_TOOQUICK:
Serial.println("Polled to quick ");
break;
}
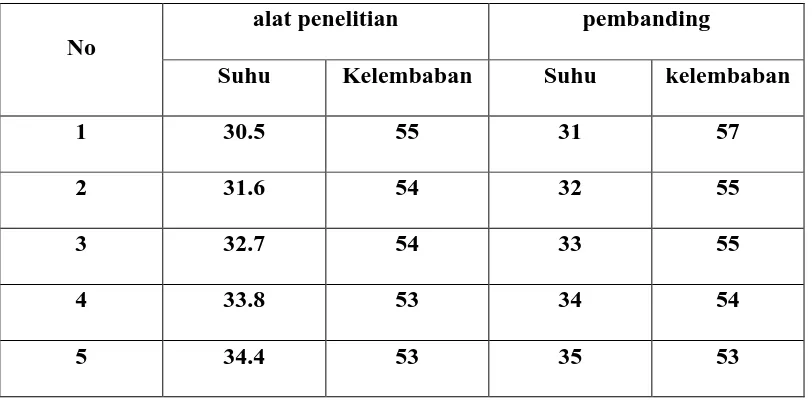
Tabel Data 4.1 pengujian sensor DHT22
No
alat penelitian pembanding
Suhu Kelembaban Suhu kelembaban
1 30.5 55 31 57
2 31.6 54 32 55
3 32.7 54 33 55
4 33.8 53 34 54
5 34.4 53 35 53
4.3. Pengujian Rangkaian Relay dan Pompa
Untuk pengujian relay yaitu diberikan tegangan pada kaki basis di transistor, maka transistor BC547 akan aktif (satu rasi) . Hal ini menyebabkan kumparan pada relay dialiri arus listrik. Dengan demikian, kontak relay akan terhubung. Dioda berfungsi sebagai komponen pengaman transistor arus balik yang mungkin timbul akibat dari aktifnya kumparan relay. maka transistor dalam keadaan tidak aktif, untuk pengujian relay dengan program di bwah ini.
}
Setelah program di download ke mikrokontroler, Relay Akan Mengalami Kondisi Terbuka Dan Tertutu Selama 1 Detik.
4.4. Pengujian Rangkaian LCD
Pengujian LCD menggunakan arduino uno r3 sebagai alat untuk memerintahkan LCD menampilkan beberapa karakter. Pada pengujian LCD ini arduino uno r3 diberi program untuk menampilkan nilai suhu dan kelembaban.
Pengujian LCD bertujuan untuk memastikan LCD nya dapat berjalan dengan baik. Sehingga pada proses pemantuan suhu dan kelembaban ruang pengering akan didapatkan data yang baik.
Berikut adalah program untuk pengujian LCD
include <LiquidCrystal.h>
LiquidCrystal lcd(2, 3, 4, 5, 6, 7);
void setup() {
lcd.begin(16, 2);
}
void loop() {
lcd.setCursor(0,0);
lcd.print("hello, world!");
}
4.5. Pengujian Motor Servo
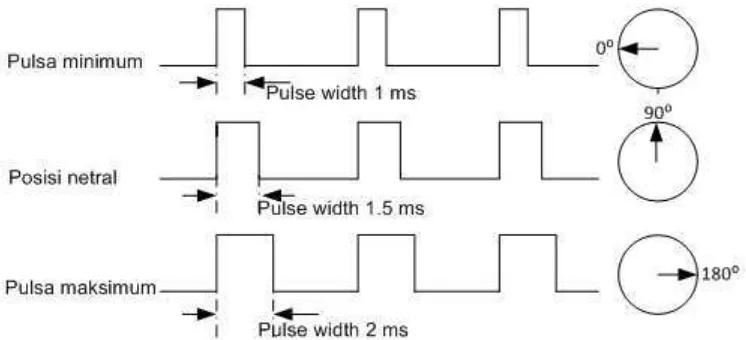
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam).
Gambar 4.1 Gambar Pengujian Motor Servo
Dengan program sebagai berikut.
#include <Servo.h>
Servo myservo;
// create servo object to control a servo
int pos = 0; // variable to store the servo position
myservo.attach(9);
// attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
// goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos);
// tell servo to go to position in variable 'pos'
delay(15);
// waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) {
// goes from 180 degrees to 0 degrees
myservo.write(pos);
// tell servo to go to position in variable 'pos'
delay(15);
// waits 15ms for the servo to reach the position
}
4.6. Pengujian Keseluruhan
Pengujian rangkaian yaitu dengan program sebagai berikut.
#include <DHT22.h>
DHT22_ERROR_t errorCode;
errorCode = myDHT22.readData();
lcd.setCursor(0,0);
lcd.print("auto watering");
float suhu = myDHT22.getTemperatureC();
float RH = myDHT22.getHumidity();
lcd.print("T=");
lcd.print(suhu,1);
lcd.print(" RH=");
lcd.print(RH,1);
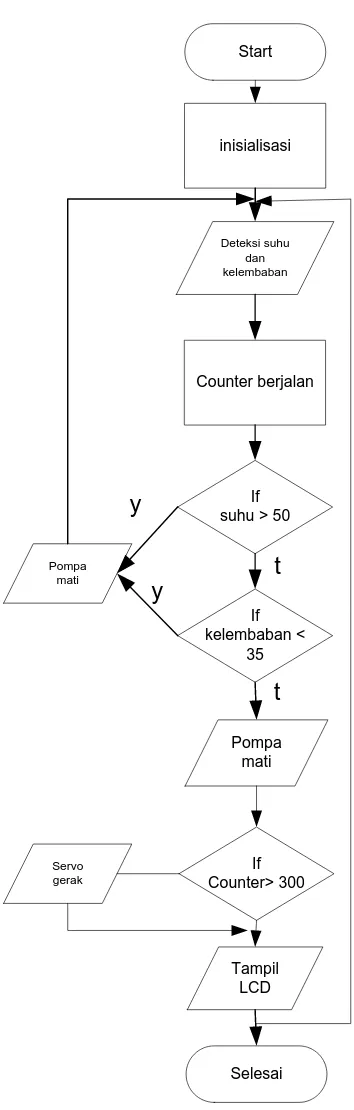
if (RH < 35) {digitalWrite(8,HIGH);delay(2000);}
else if (suhu > 50)
{digitalWrite(8,HIGH);delay(2000);}
else {digitalWrite(8,LOW);}
}
Pengujian ini dilakukan dengan mendekatkan solder pada sensor DHT22 maka didapat data sebagai berikut:
Tabel Data 4.2 Pengujian Keseluruhan
No Suhu kelembaban Setatus pompa
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Pengambilan data yang dilakukan dibeberapa tempat yang berbeda dengan tujuan untuk mengetahui tingkat sensitifitas dan respon sensor dan dari pengujian alat yang telah dilakukan, didapatkan data yang menyatakan hasil pengukuran oleh alat buatan jika dibandingkan dengan termometer. Data-data tersebut adalah sebagai berikut :
1. Pada waktu Pengujian alat, pada suhu tinggi sensor akan memicu pompa untuk menyiram tanaman padi.
2. Pada LCD akan ditampilkan tanda peringatan berupa tulisan “” sebagai penunjuk bahwasannya batas suhu yang diijinkan sudah terdeteksi.
3. Pada LCD juga ditampilkan tulisan “SUHU NORMAL” ketika batas suhu dan kelembaban masih dalam batas.
4. Pengusir Hama diatur per 5 menit mengepak kan sayap.
5.2 Saran
Beberapa tambahan yang diperlukan dalam meningkatkan kemampuan alat ini adalah:
1.
Supaya rangkaian yang digunakan tidak terganggu, sebaiknya alat ini dikemas dalam bentuk yang lebih aman dan terlindungi, sehingga penggunaannya lebih efektif.2.
Dengan beberapa pengembangan dan penyempurnaan sistem dari alat ini akan dapat lebih baik lagi hasilnya.3.
Alat yang telah dibuat sebaiknya diletakkan ditengah sawah dan dapat meyiram secara berputar.4.
Diharapkan kedepannya alat ini dapat di kembangkan dengan melalui system Android dan tampilan LED yang lebih menarik dan dapat dibaca dari jarak yang cukup jauh.5.
Diharapkan kedepannya desain alat penyiram otomatis ini lebih praktis dalam packaging.BAB II
TINJAUAN PUSTAKA
2.1 Sawah
2.1.1 Defenisi Sawah
Dalam pengertian sawah menurut para ahli adalah usaha pertanian yang dilaksanakan pada tanah basah dan memerlukan air untuk irigasi. Jenis tanaman yang terutama untuk pertanian sawah adalah padi. Dalam bersawah, pengolahan lahan dilakukan secara intensif dan merupakan pertanian menetap. Sawah sangat bermanfaat bagi manusia karna tanpa sawah maka padi dan sejenisnya tidak akan kita makan , dimana kita tahu semua bahwa padi merupakan makanan khas Indonesia. Sawah di Indonesia umumnya dibedakan menjadi tiga macam, yaitu sawah irigasi, sawah tadah hujan dan sawah pasang surut.
2.1.2 Jenis dan Karakteristik Sawah
Berdasarkan sifatnya sawah dikelompokkan menjadi :
1. Sawah Irigasi merupakan sistem pertanian dengan pengairan yang terutur, tidak bergantung curah hujan karena pengairan dapat diperoleh dari sungai
waduk. Pertanian sawah irigasi biasanya panen dua kali setahun dan pada
musim kemarau dapat diselingi dengan tanaman palawija.
2. Sawah Tadah Hujan adalah sawah yang mendapatkan air hanya pada saat musim hujan sehingga sangat tergantung pada musim. Sawah tadah hujan
ditanami dengan padi jenis gogorancah. Namun, pada musim kering ditanami
dengan palawija, jagung dan ketela pohon.
3. Sawah Pasang Surut tergantung pada keadaan air permukaan yang dipengaruhi oleh kondisi pasang surutnya air sungai. Pada saat pasang, sawah tergenang
air, sedangkan pada saat surut sawah kering dan ditanami dengan padi. Sawah
pasang surut banyak terdapat di Sumatera, Kalimantan, dan Papua.Bising
implusif berulang
Bising ini sama dengan bising implusif tetapi terjadi berulang-ulang. Contohnya adalah mesin tempa.
Sawah merupakan media tanam untuk tanaman padi, yang mana padi menghasilkan beras dan merupakan pangan pokok penduduk Indonesia.
2.1.3 Tanaman Padi
Padi merupakan tanaman yang paling penting di negeri kita Indonesia ini. Betapa
tidak karena makanan pokok di Indonesia adalah nasi dari beras yang tentunya
dihasilkan oleh tanaman padi. Selain di Indonesia padi juga menjadi makanan
pokok negara-negara di benua Asia lainnya seperti China, India, Thailand,
Vietnam dan lain-lain. Padi merupakan tanaman berupa rumput berumpun.
Tanaman pertanian ini berasal dari dua benua yaitu Asia dan Afrika Barat tropis
dan subtropis. Bukti sejarah memperlihatkan bahwa penanaman padi di Zhejiang
(Cina) sudah dimulai pada 3.000 tahun SM. Fosil butir padi dan gabah ditemukan
beberapa wilayah asal padi adalah Bangladesh Utara, Burma, Thailand, Laos,
Vietnam.
Gambar 2.2 Sawah ditanami Padi
Hama yang banyak menyerang tanaman ini adalah tikus, orong-orong,
kepinding tanah (lembing batu), walang sangit dan wereng coklat.
Negara produsen padi terkemuka adalah Republik Rakyat Cina (31% dari
total produksi dunia), India (20%), dan Indonesia (9%). Namun hanya sebagian
kecil produksi padi dunia yang diperdagangkan antar negara (hanya 5%-6% dari
total produksi dunia). Thailand merupakan pengekspor padi utama (26% dari total
padi yang diperdagangkan di dunia) diikuti Vietnam (15%) dan Amerika Serikat
(11%). Indonesia merupakan pengimpor padi terbesar dunia (14% dari padi yang
diperdagangkan di dunia) diikuti Bangladesh (4%), dan Brazil (3%).
2.1.4 Karakteristik Tanaman Padi
padi untuk pembentukan karbohidrat di daun, menjaga hidrasi protoplasma, pengangkutan dan mentranslokasikan makanan serta unsur hara dan mineral. Air sangat dibutuhkan untuk perkecambahan biji. Pengisapan air merupakan kebutuhan biji untuk berlangsungnya kegiatan-kegiatan di dalam biji (Kartasapoetra, 1988). Botani dan Morfolog Botani
morfologis dan biologis antara padi sawah dan padi gogo, yang membedakan hanyalah tempat tumbuhnya. Akar tanaman padi berfungsi menyerap air dan zat – zat makanan dari dalam tanah terdiri dari:1) Akar tunggang yaitu akar yang tumbuh pada saat benih berkecambah, 2) Akar serabut yaitu akar yang tumbuh dari akar tunggang setelah tanaman berumur 5 – 6 hari. Ciri khas daun tanaman padi yaitu adanya sisik dan telinga daun, hal ini yang menyebabkan daun tanaman padi dapat dibedakan dari jenis rumput yang lain. Adapun bagian daun padi yaitu: 1) Helaian daun terletak pada batang padi, bentuk memanjang seperti pita,
2) Pelepah daun menyelubungi batang yang berfungsi memberi dukungan pada ruas bagian jaringan,
3) Lidah daun terletak pada perbatasan antara helaian daun dan leher daun.
Perkecambahan adalah munculnya tunas (tanaman kecil dari biji). Embrio yang merupakan calon individu baru terdapat di dalam benih. Jika suatu benih tanaman ditempatkan pada lingkungan yang menunjang dan memadai, benih tersebut akan berkecambah. Perkecambahan benih dapat dibedakan menjadi dua, yaitu: Perkecambahan epigeal adalah ruas batang di bawah daun lembaga atau hipokotil sehingga mengakibatkan daun lembaga dan kotiledon terangkat ke atas tanah, misalnya pada kacang hijau (Phaseoulus radiatus), sedangkan perkecambahan hipogeal adalah ruas batang teratas (epikotil) sehingga daun lembaga ikut tertarik ke atas tanah, tetapi kotiledon tetap di bawah tanah, misalnya pada tanaman padi (Oryza sativa L.) (Pratiwi, 2006).
dikehendaki tahun-1 sekitar 1500–2000 mm. Suhu yang baik untuk pertumbuhan tanaman padi adalahn 23 °C dan tinggi tempat yang cocok untuk tanaman padi berkisar antara 0–1500 m dpl. Tanah yang baik untuk pertumbuhan tanaman padi adalah tanah sawah yang kandungan fraksi pasir, debu dan lempung dalam perbandingan tertentu dengan diperlukan air dalam jurnlah yang cukup. Padi dapat tumbuh dengan baik pada tanah yang ketebalan lapisan atasnya antara 18–22 cm dengan pH antara 4–7 (Siswoputranto, 1976).
Faktor yang menentukan jarak tanam pada tanaman padi sawah tadah hujan tergantung pada:
a) Jenis tanaman Jenis padi tertentu dapat menghasilkan banyak anakan. Jumlah anakan yang banyak memerlukan jarak tanam yang lebih besar, sebaliknya jenis padi yang memiliki jumlah anakan sedikit memerlukan jarak tanam yang lebih sempit.
b) Kesuburan tanah Penyerapan hara oleh akar tanaman padi akan mempengaruhi penentuan jarak tanam, sebab perkembangan akar atau tanaman itu sendiri pada tanah yang subur lebih baik dari pada perkembangan akar / tanaman pada tanah yang kurang subur. Jarak tanam yang dibutuhkan pada tanah yang suburpun akan lebih lebar dari pada jarak tanam padah tanah yang kurang subur. Air yang diberikan dalam jumlah cukup sebenarnya bermanfaat juga untuk mencegah pertumbuhan gulma, menghalau wereng yang bersembunyi di batang padi sehingga lebih mudah disemprot dengan pestisida, serta mengurangi serangan hama (Siregar dan Hadrian, 1987).
1. Vegetatif (awal pertumbuhan sampai pembentukan malai); 2. Reproduktif (pembentukan malai sampai pembungaan); dan 3. Pematangan (pembungaan sampai gabah matang)
Keseluruhan organ tanaman padi terdiri dari dua kelompok, yakni organ vegetatif dan organ generatif (reproduktif). Bagian-bagian vegetatif meliputi akar, batang dan daun, sedangkan bagian generatif terdiri dari malai, gabah dan bunga. Dari sejak berkecambah sampai panen, tanaman padi memerlukan 3-6 bulan, yang seluruhnya terdiri dari dua stadia pertumbuhan, yakni vegetatif dan generatif. Fase reproduktif selanjutnya terdiri dari dua, pra berbunga dan pasca berbunga, periode pasca-berbunga disebut juga sebagai periode pemasakan. Yoshida membagi pertumbuhan padi menjadi 3 bagian yakni fase vegetatif, reproduktif, dan pemasakan. Fase vegetatif meliputi pertumbuhan tanaman dari mulai berkecambah sampai dengan inisiasi primordia malai: fase reproduktif dimulai dari inisiasi primordia malai sampai berbunga (heading) dan pemasakan dimulai dari berbunga sampai masak panen. Untuk suatu varietas berumur 120 hari yang ditanam di daerah tropik, maka vase vegetatif memerlukan 60 hari, fase reproduktif 30 hari, dan fase pemasakan 30 hari. Stadia reproduktif ditandai dengan memanjangnya ruas teratas pada batang, yang sebelumnya tertumpuk rapat dekat permukaan tanah.
Pembungaan (heading) adalah stadia keluarnya malai, sedangkan antesis segera mulai setelah heading. Maka, heading diartikan sama dengan antesis ditinjau dari segi hari kalender. Dalam suatu komunitas tanaman, fase pembungaan memerlukan waktu selama 10-14 hari, 14 karena terdapat pebedaan laju perkembangan antar tanaman maupun antar anakan. Apabila 50% bunga telah keluar maka pertanaman tersebut dianggap dalam fase pembungaan. Antesis telah mulai bila benang sari bunga yang paling ujung pada tiap cabang malai telah tampak keluar. Pada umunnya antesis berlangsung antara jam 08.00 – 13.00 dan persarian (pembuahan) akan selesai dalam 5-6 jam setelah antesis. Dalam suatu malai, semua bunga memerlukan 7-10 hari untuk antesis, tetapi pada umumnya hanya 7 hari. Antesis terjadi 25 hari setelah bunting. Berdasarkan hal-hal tersebut maka dapat diperkirakan bahwa berbagai komponen pertumbuhan dan hasil telah mencapai maksimal sebelum bunganya sendiri keluar dari pelepah daun bendera. Jumlah malai pada tiap satuan luas tidak bertambah lagi 10 hari setelah anakan maksimal, jumlah gabah pada tiap malai telah ditentukan selama periode 32 sampai 5 hari sebelum heading. Sementara itu, ukuran sekam hanya dapat dipengaruhi oleh radiasi selama 2 minggu sebelum antesis.
Periode pemasakan bulir terdiri dari 4 stadia masak dalam proses pemasakan bulir (Arafah, 2009). 1. Stadia masak susu Tanda-tandanya : tanaman padi masih berwarna hijau, tetapi malai-malainya sudah terkulai: ruas batang bawah kelihatan kuning: gabah bila dipijit dengan kuku keluar cairan seperti susu. 2. Stadia masak kuning Tanda-tandanya : seluruh tanaman tampak kuning: dari semua bagian tanaman, 15 hanya buku-buku sebelah atas yang masih hijau: isi gabah sudah keras, tetapi mudah pecah dengan kuku. 3. Stadia masak penuh Tanda-tandanya : buku-buku sebelah atas berwarna kuning, sedang batang-batang mulai kering: isi gabah sukar dipecahkan: pada varietas-varietas yang mudah rontok, stadia ini belum terjadi kerontokan. 4. Stadia masak mati Tanda-tandanya : isi gabah keras dan kering: varietas yang mudah rontok pada stadia ini sudah mulai rontok. Stadia masak mati terjadi setelah ± 6 hari setelah masak penuh.
2.1.5 Hama pada Tanaman Padi
Hama adalah organisme perusak tanaman pada akar, batang, daun atau bagian
tanaman lainnya sehingga tanaman tidak dapat tumbuh dengan sempurna atau
mati.
Serangga dikatakan hama apabila serangga tersebut mengurangi kualitas
dan kuantitas bahan makanan, pakan ternak, tanaman serat, hasil pertanian atau
panen, pengolahan dan dalam penggunaannya serta dapat bertindak sebagai vektor
penyakit pada tanaman, binatang dan manusia, dapat merusak tanaman hias ,
Dalam Pengendalian Hama Terpadu bahwa hama bukan hanya pada serangga
tetapi bisa pada vertebrata, tungau, virus, bateri, gulma dan organisme
pengganggu tanaman lainnya.
Menurut Smith (1983) hama adalah semua organisme atau agens biotik
yang merusak tanaman dengan cara yang bertentangan dengan kepentingan
manusia.
Dalam arti yang luas bahwa hama adalah makhluk hidup yang mengurangi
kualitas dan kuantitas beberapa sumber daya manusia yang berupa tanaman atau
binatang yang dipelihara yang hasil dan seratnya dapat diambil untuk kepentingan
manusia.
Ciri-ciri hama :
1. Hama dapat dilihat oleh mata telanjang
2. Umumnya berasal dari golongan hewan ( tikus, serangga, ulat, dan
lain-lain)
3. Hama cenderung merusak bagian tanaman tertentu sehingga tanaman
menjadi mati atau tetap hidup tetapi tidak banyak memberikan hasil
4. Organisme hama biasanya lebih mudah diatasi karena hama tampak oleh
mata dan dapat dilihat secara langsung
2.2 Mikrokontroler
Mikrokontroler sering disebut sebagai mikrokomputer atau embedded system. Mikrokontroler dipandang sebagai suatu sistem yang terdiri atas input,program dan output. Mikrokontroler dapat diatur oleh sebuah program. Proses untuk memasukkan program ke dalam mikrokotroler disebut dengan download dan alat yang digunakan disebut dengan downloader. Seperti sistem komputer nilai tambah sistem mikrokontroler dapat dilipatgandakan melalui program.
Proses pengerjaan bergantung pada jenis instruksi, bisa membaca, mengubah nilai-nilai pada register, RAM, isi Port, atau melakukan pembacaan dan dilanjutkan dengan pengubahan data. Program Counter telah berubah nilainya (baik karena penambahan otomatis pada langkah 1, atau karena pengubahan-pengubahan pada langkah 2). Selanjutnya yang dilakukan oleh mikrokontroler adalah mengulang kembali siklus ini pada langkah 1. Demikian seterusnya hingga power dimatikan. Prinsip kerja mikrokontroler adalah berdasarkan nilai yang berada pada register Program Counter, mikrokontroler mengambil data pada ROM dengan alamat sebagaimana yang tertera pada register Program Counter. Selanjutnya isi dari register Program Counter ditambah dengan satu (Increment) secara otomatis. Data yang diambil pada ROM merupakan urutan instruksi program yang telah dibuat dan diisikan sebelumnya oleh pengguna. Instruksi yang diambil tersebut diolah dan dijalankan oleh mikrokontroler.
Mikrokontroler banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax, dan peralatan elektronik lainnya.
Mikrokontroler dapat disebut pula sebagai komputer yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini :
Gambar 2.4 Bagian Mikrokontroler
Mikrokontroler menerapkan arsitektur Harvard, dalam arsitektur ini penjemputan instruksi dapat dilaksanakan secara bersamaan dengan pemindahan data. Tetapi dalam kebanyakan mesin dengan arsitektur Harvard juga memori tersebut dihubungkan ke bus bersama sehingga paralelismenya sangat berkurang. Secara umum, mikrokontroler mengandung tujuh komponen : Prosesor (CPU), ROM, RAM, bandar (port) I/O, Rangkaian Interupsi, Timer, dan Bus yang dihubungkan.
dalam suatu mikrokontroler. CPU pada mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU ini akan membaca program yang tersimpan di dalam ROM dan melaksanakannya.
b. ROM : digunakan untuk menyimpan data yang bersifat permanen. Dalam mikrokontroler program disimpan dalam ROM, atau EPROM atau Flash EPROM. Ada mikrokontroler yang dapat ditambah ROM eksternal di luar serpih mikrokontroler. Disamping ROM untuk program juga digunakan EEPROM untuk menyimpan data. ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya hanya dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia mikrokontroler ROM digunakan untuk menyimpan program bagi mikrokontroler tersebut. Program tersimpan dalm format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah terbaca
oleh mikrokontroler akan memiliki arti tersendiri.
c. RAM : RAM digunakan untuk menyimpan data yang bersifat sementara. Dalam mikrokontroler, RAM yang tersedia sangat sedikit yang sebagiannya digunakan lagi sebagai register prosesor, dikatakan register dipetakan sebagai memori. Berbeda dengan ROM, RAM adalah jenis memori selain dapat dibaca juga dapat ditulis berulang kali. Tentunya dalam pemakaian mikrokontroler ada semacam data yang bisa berubah pada saat mikrokontroler tersebut bekerja. Perubahan data tersebut tentunya juga akan tersimpan ke dalam memori. Isi pada RAM akan hilang jika catu daya listrik hilang.
atau dengan frekuensi tertentu. Pulsa ini digunakan untuk sebagai inetrupsi internal untuk memulai atau mengakhiri kegiatan tertentu. Dalam kebanyakan mikrokontroler, pencacah ini adalah pencacah naik, berbeda dengan pencacah turun yang diterapkan dalam sistem mikroprosesor.
e. PORT I/O : Terdiri atas Port Paralel dan Port Seri yang mempunyai kemampuan tristate. Pada sebagian mikrokontroler disediakan bandar masukan/keluaran analog. Fungsi bandar ini pada umumnya dipilih (dikonfigurasi) sebagai masukan/keluaran paralel/seri analog. Arah aliran data pada Port masukan/keluaran pada umumnya dipilih melalaui register arah (Data Direction Register, disingkat DDR). Port ini juga dipetakan sebagai memori. Untuk berkomunikasi dengan dunia luar, maka mikrokontroler menggunakan terminal I/O (port I/O), yang digunakan untuk masukan atau keluaran.
f. Interupsi : interupsi dapat dibedakan atas interupsi perangkat lunak yang dibangkitkan oleh interupsi yang ditanamkan dalam program dan interupsi perangkat keras yang dibangkitkan oleh sinyal perangkat keras yang baik yang berasal dari sumber internal seperti timer atau sumber eksternal dari port seri atau paralel.
2.3 Hardware Arduino
Papan Arduino merupakan papan mikrokontroler yang berukuran kecil atau dapat diartikan juga dengan suatu rangkaian berukuran kecil yang didalamnya terdapat komputer berbentuk suatu chip yang kecil. Arduino didefinisikan sebagai sebuah platform elektronik yang open source, berbasis pada software dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk seniman, desainer, hobbies dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif. Arduino pada awalnya dikembangkan di Ivrea, Italia.
Bahasa pemrograman arduino adalah bahasa pemrograman yang umum digunakan untuk membuat perangkat lunak yang ditanamkan pada arduino board. Pada Gambar dibawah dapat dilihat sebuah papan Arduino dengan beberapa bagian komponen didalamnya.
Gambar 2.5 Hardware Arduino Pada hardware arduino terdiri dari 20 pin yang meliputi: a. 14 pin IO Digital (pin 0–13)
b. 6 pin Input Analog (pin 0–5)
Sejumlah pin analog bernomor 0–5 yang dapat digunakan untuk membaca nilai input yang memiliki nilai analog dan mengubahnya ke dalam angka antara 0 dan 1023.
c. 6 pin Output Analog (pin 3, 5, 6, 9, 10 dan 11)
Sejumlah pin yang sebenarnya merupakan pin digital tetapi sejumlah pin tersebut dapat diprogram kembali menjadi pin output analog dengan cara membuat programnya pada IDE.
Papan Arduino Uno dapat mengambil daya dari USB port pada komputer dengan menggunakan USB charger atau dapat pula mengambil daya dengan menggunakan suatu AC adapter dengan tegangan 9 volt. Jika tidak terdapat power supply yang melalui AC adapter, maka papan Arduino akan mengambil daya dari USB port. Tetapi apabila diberikan daya melalui AC adapter secara bersamaan dengan USB port maka papan Arduino akan mengambil daya melalui AC adapter secara otomatis.
2.4 Software Arduino
1. Editor Program
Sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing
2. Compiler
Sebuah modul yang mengubah kode program menjadi kode biner bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa processing.
3. Uploader
Sebuah modul yang memuat kode biner dari komputer ke dalam memory di dalam papan Arduino
Dalam bahasa pemrograman arduino ada tiga bagian utama yaitu : a. Struktur Program Arduino
1) Kerangka Program
Kerangka program arduino sangat sederhana, yaitu terdiri atas dua blok. Blok pertama adalah void setup() dan blok kedua adalah void loop. Blok Void setup () : Berisi kode program yang hanya dijalankan sekali sesaat setelah arduino dihidupkan atau di-reset. Merupakan bagian persiapan atau instalasi program.
Blok void loop() : Berisi kode program yang akan dijalankan terus menerus. Merupakan tempat untuk program utama.
2) Sintaks Program
b. Variabel : Sebuah program secara garis besar dapat didefinisikan sebagai instruksi untuk memindahkan angka dengan cara yang cerdas dengan menggunakan sebuah varibel.
c. Fungsi :Pada bagian ini meliputi fungsi input output digital, input output analog, advanced I/O, fungsi waktu, fungsi matematika serta fungsi komunikasi.
Pada proses Uploader dimana pada proses ini mengubah bahasa pemrograman yang nantinya dicompile oleh avr-gcc (avr-gcc compiler) yang hasilnya akan disimpan kedalam papan arduino. Avr-gcc compiler merupakan suatu bagian penting untuk software bersifat open source. Dengan adanya avr-gcc compiler, maka akan membuat bahasa pemrogaman dapat dimengerti oleh mikrokontroler. Proses terakhir ini sangat penting, karena dengan adanya proses ini maka akan membuat proses pemrogaman mikrokontroler menjadi sangat mudah. Berikut ini merupakan gambaran siklus yang terjadi dalam melakukan pemrogaman Arduino: 1. Koneksikan papan Arduino dengan komputer melalui USB port.
2. Tuliskan sketsa rancangan suatu program yang akan dimasukkan ke dalam papan Arduino.
3. Upload sketsa program ke dalam papan Arduino melalui kabel USB dan kemudian tunggu beberapa saat untuk melakukan restart pada papan Arduino.
2.5 Masing-masing Sumber Daya dan Pin Tegangan Arduino
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supplay external (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang dibubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada konektor POWER.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika arduino uno diberi tegangan di bawah 7 volt, maka pin 5V akan menyediakan tegangan di bawah 5 volt dan arduino uno munkin bekerja tidak stabil. Jika diberikan tegangan melebihi 12 volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7 sampai 12 volt.
2.6 LCD (Liquid Crystal Display)
1. Terdiri dari 16 karakter dan 2 baris. 2. Mempunyai 192 karakter tersimpan. 3. Terdapat karakter generator terprogram 4. Dapat dialamati dengan mode 4-bit dan 8-bit 5. Dilengkapi dengan back light.
6. Tersedia VR untuk mengatur kontras.
7. Pilihan konfigurasi untuk operasi write only atau read/write.
8. Catu daya +5 Volt DC dan Kompatibel dengan DT-51 dan DT-AVR Low Cost Series serta sistem mikrokontroler/mikroprosesor lain.
Gambar 2.6 LCD (Liquid Crystal Display)
Adapun konfigurasi dan deskripsi dari pin-pin LCD antara lain: 1. Pin 1 dihubungkan ke Gnd
2. Pin 2 dihubungkan ke Vcc +5V
3. Pin 3 dihubungkan ke bagian tegangan potensiometer 10KOhm sebagai pengatur kontras.
5. Pin 5 digunakan untuk mengatur fungsi LCD. Jika di set ke logika 1 (high, +5V) maka LCD berfungsi untuk menerima data (membaca data). Dan fungsi untuk mengeluarkan data, jika pin ini di set ke logika 0 (low, 0V). Namun kebanyakan aplikasi hanya digunakan untuk menerima data, sehingga pin 5 ini selalu dihubungkan ke Gnd.
6. Pin 6 adalah terminal enable. Berlogika 1 setiap kali pengiriman atau pembaca data.
7. Pin 7 – Pin 14 adalah data 8 bit data bus (Aplikasi ini menggunakan 4 bit MSB saja, sehingga pin data yang digunkan hanya Pin 11 – Pin 14).
8. Pin 15 dan Pin 16 adalah tegangan untuk menyalakan lampu LCD. Tabel 2.1 Deskripsi Pin Pada LCD
Pin Deskripsi
1 Ground
2 Vcc
3 Pengatur kontras
4 “RS” Instruction/Register Select 5 “R/W” Read/Write LCD Registers 6 “EN” Enable
7-14 Data I/O Pins
15 Vcc
16 Ground
Cara kerja LCD (Liquid Crystal Display) pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit atau 8-bit. Jika jalur data 4-bit
table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu.
2.7 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang menaglir dalam suatu rangkaian.
Sesuai dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Dalam hukum ohm diketahui bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Satuan dari resistansi dari resistor disebut Ohm atau dilambangkan dengan (Omega).
Gambar 2.7 Gambar dan Lambang Resistor
2.8 Motor Servo
Motor servo adalah sebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol.
Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Gambar 2.8 Motor Servo
Secara umum terdapat 2 jenis motor servo. Yaitu motor servo standard dan motor servo Continous. Servo motor tipe standar hanya mampu berputar 180 derajat. Motor servo standard sering dipakai pada sistim robotika misalnya untuk membuat “ Robot Arm” ( Robot Lengan ). sedangkan Servo motor continuous
dapat berputar sebesar 360 derajat. motor servo Continous sering dipakai untuk Mobile Robot. Pada badan servo tertulis tipe servo yang bersangkutan.
2.9 Bahasa Pemograman C
Bahasa C dikembangkan pada Lab Bell pada tahun 1978, oleh Dennis Ritchi dan Brian W. Kernighan. Pada tahun 1983 dibuat standar C yaitu stnadar ANSI ( American National Standards Institute ), yang digunakan sebagai referensi dari berbagai versi C yang beredar dewasa ini termasuk Turbo C.
Dalam beberapa literature, bahasa C digolongkan bahasa level menenganh karena bahasa C mengkombinasikan elemen bahasa tinggi dan elemen bahasa rendah. Kemudahan dalam level rendah merupakan tujuan diwujudkanya bahasa C. pada tahun 1985 lahirlah pengembangan ANSI C yang dikenal dengan C++ (diciptakan oleh Bjarne Struostrup dari AT % TLab). Bahasa C++ adalah pengembangan dari bahasa C. bahasa C++ mendukung konsep pemrograman berorientasu objek dan pemrograman berbasis windows.
bahasa ni masih popular dan penggunaannya tersebar di berbagai platform dari windows samapi linux dan dari PC hingga main frame.
Ada pun kekurangan dan Kelebihan Bahasa C sebagai berikut : 1. Kelebihan Bahasa C:
· Bahasa C tersedia hampir di semua jenis computer.
· Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
· Bahasa C hanya menyediakan sedikit kata-kata kunci. hanya terdapat 32 kata kunci.
· Proses executable program bahasa C lebih cepat · Dukungan pustaka yang banyak.
· C adalah bahasa yang terstruktur
· Bahasa C termasuk bahasa tingkat menengah
Penempatan ini hanya menegaskan bahwa c bukan bahasa pemrograman yang berorientasi pada mesin yang merupakan ciri bahasa tingkat rendah. Melainkan berorientasi pada obyek tetapi dapat dinterprestasikan oleh mesin dengan cepat. Secepat bahasa mesin inilah salah satu kelebihan c yaitu memiliki kemudahan dalam menyusun programnya semudah bahasa tingkat tinggi namun dalam mengesekusi program secepat bahasa tingkat rendah.
2. Kekurangan Bahasa C:
· Banyaknya operator serta fleksibilitas penulisan program kadang-kadang membingungkan pemakai.
3. Struktur Bahasa C
a. Program bahasa C tersusun atas sejumlah blok fungsi.
b. Setiap fungsi terdiri dari satu atau beberapa pernyataan untuk melakukan suatu proses tertentu.
c. Tidak ada perbedaan antara prosedur dan fungsi.
d. Sstiap program bahasa C mempunyai suatu fungsi dengan nama “main” (Program Utama).
e. Fungsi bisa diletakkan diatas atau dibawah fungsin “main”. f. Setiap statemen diakhiri dengan semicolon (titik koma).
2.10 Sensor DHT22
Sensor DHT merupakan sensor suhu dan kelembaban dari Aosong Electronic yang terdiri dari dua bagian yaitu sensor kelembaban kapasitif dan thermistor. Sensor ini tidak memerlukan rangkaian pengendali sinyal dan ADC karena menggunakan cip mikropengendali dengan keluaran sinyal digital (Aosong, 2012). DHT memiliki banyak varian, salah satunya yaitu DHT22 (AM2302) dengan bentuk fisik seperti pada gambar.
2.11 Pompa Air
Pompa merupakan alat mekanis yang dipergunakan untuk memindahkan air dari
suatu tempat ke tempat lain dengan elevasi yang lebih tinggi.Pompa biasanya
didesain dengan dua (2) pengertian yang berbeda.Dengan hidraulik dan
persyaratan dari cairan sebagai pertimbangan. Untuk klasifikasi ini pompa dapat
disebut sebagai centrifugal, rotary, dan reciprocating.
Gambar 2.10 Pompa Air
Berdasarkan tipe atau pemakaian tertentu dari pompa, misalnya deep well
pump, pompa air kotor, pompa bahan kimia, dan lain-lain.
Pada saat penentuan suatu jenis pompa yang akan dipakai, maka ada beberapa
pertimbangan yang perlu diperhatikan. Diantaranya adalah: Head, Kapasitas, Sifat
BAB I PENDAHULUAN
1.1. Latar Belakang Masalah
Indonesia merupakan negara agraris dan sebagian besar penduduknya bermata pencaharian di bidang pertanian. Sebenarnya negara ini di untungkan karena dikaruniai kondisi alam yang mendukung, hamparan lahan yang luas, keragaman hayati yang melimpah, serta ber iklim tropis dimana sinar matahari terjadi sepanjang tahun sehingga bisa menanam sepanjang tahun. Realita sumberdaya alam seperti ini sewajarnya mampu membangkitkan Indonesia menjadi negara yang makmur, tercukupi kebutuhan pangan seluruh warganya.
Pangan merupakan kebutuhan pokok yang mendasar bagi kelangsungan hidup manusia. Pangan adalah segala sesuatu yang berasal dari tanaman, ternak dan ikan untuk memenuhi kebutuhan akan karbohidrat, protein, lemak, vitamin dan mineral serta turunannya yang bermanfaat bagi kesehatan. Manusia dengan segala kemampuannya selalu berusaha mencukupi kebutuhannya dengan berbagai cara. Jenis tanaman pangan yang utama bagi penduduk Indonesia adalah padi yang dihasilkan dari lahan pertanian sawah.
akibatkan anomali cuaca yang di timbulkan pemanasan global dan perkembangan hama yg tidak terkontrol.
Anomali cuaca merupakan kondisi tidak teraturnya cuaca yang menyimpang dari keadaan normalnya secara rata-rata atau fenomena cuaca yang tidak seperti biasanya.
Dalam kesempatan ini penulis mencoba membuat suatu alat menggunakan Arduino Uno untuk system penyiraman otomatis dan pengusir hama pada sawah mengacu pada sensor suhu dan kelembaban udara untuk menentukan suhu dan kelembaban udara di sawah agar dapat menyiram tanaman padi secara otomatis dan menggukan motor servo menggerakan kipasan sayap burung buatan untuk menghusir hama berupa tikus dan burung kecil.. Arduino UNO merupakan sebuah board mikrokontroler yang didasarkanpada ATmega328. Arduino UNO mempunyai 14 pin digital input/output (6 diantaranya dapat digunakan sebagai output PWM), 6 input analog, sebuahosilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset.
1.2. Rumusan masalah
Berdasarkan uraian diatas, penulis tertarik untuk mengangkat permasalahan tersebut ke dalam bentuk skripsi sebagai Tugas Akhir dengan judul “SISTEM PENYIRAMAN OTOMATIS DAN PENGUSIR HAMA PADA SAWAH BERBASIS ARDUINO UNO”
1.3. Tujuan penulisan
Tujuan dilakukan Projek akhir II ini adalah sebagai berikut : 1. Mengetahui sistim kerja dari alat tersebut.
2. Menghubungkan sensor ultrasonik dengan arduino uno 3. Mengetahui aplikasi Arduino dalam kehidupan sehari hari.
1.4. Batasan Masalah
Penulis membuat alat tersebut dengan menggunakan sensor suhu dan kelembaban berbasis Arduino dengan batasan-batasan sebagai berikut:
1. Mikrokontroler yang digunakan adalah Arduino.
2. Merangkai rangkaian sensor suhu dan kelembaban dengan output
3. Alat ini memanfaatkan program dan teknologi dari perangkat arduino uno 4. Sensor yang di gunakan adalah sensor suhu dan kelembaban
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja alat peyiram otomatis dan pengusir hama tersebut dengan menggunakan sensor suhu dan kelembaban serta pompa air berbasis Arduino maka penulis menulis laporan ini sebagai berikut:
BAB I PENDAHULUAN
BAB II TINJAUAN PUSTAKA
Bab ini berisi tentang teori dasar yang digunakan sebagai bahan acuan proyek akhir II, serta komponen yang perlu diketahui untuk mempermudah dalam memahami sistem kerja alat ini.
BAB III PERANCANGAN DAN PEMBUATAN
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke Arduino.
BAB IV PENGUJIAN DAN ANALISA
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke Arduino.
BAB V KESIMPULAN DAN SARAN
SISTEM PENYIRAMAN OTOMATIS DAN PENGUSIR HAMA PADA SAWAH BERBASIS ARDUINO UNO
ABSTRAK
Alat ini dibuat untuk meyiram tanaman padi sebagai penyejuk dan juga sebagai pengusir hama seperti burung-burung kecil atau tikus. Alat ini menggunakan sensor suhu dan kelembaban serta motor servo. Penyiraman yang dilakukan alat tersebut mengacu pada hasil deteksi sensor tersebut sedangkan pengusir hama dibuat menyerupai sayap burung yang digerakkan oleh motor servo. Motor servo merupakan komponen penggerak yang bergerak dengan motor DC, serangkaian gear, potensio meter dan rangkain kontrol. Pengendali utama pada alat ini menggunakan Arduino Uno. Suhu dan kelembaban yang dideteksi sensor akan diolah arduino menghidupkan pompa air untuk menyemprot air. Komponen lainnya yang mendukung alat ini adala h LCD, Relay, sensor DHT22 pompa air dan Arduino Uno.
AUTOMATIC WATERING SYSTEM AND BUG REPPELENT IN THE FIELDS RICE BASED ARDUINO UNO
ABSTRACT
This tools made for watering plants rice as conditioning and bug reppelent as small birds or rat. This tools uses temperature and humidity sensors as well as servo motors. Watering is done the tool reffring to the result of the sensor detection. Where the bug reppelent made to resemble a birds wings driven by servo motors. A servo motors drive components that move with DC motor, series gear, potentiometer and the control circuit more. Imitation using mounted the servo motor will move 180˚ up down interval 15 minutes. The movement can
make birds and rat gone in the fields. The main controller on this tools use Arduino Uno. Temperature and humidity sensor is detected will be processed Arduino to turn on the water pump to the spray water. Other components that support these tools are LCD, Relay, Sensor DHT22 and Arduino Uno.
TUGAS AKHIR
DERRY AULIA RAHMAN
132411026
PROGRAM STUDI D-III METROLOGI DAN INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA MEDAN
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
DERRY AULIA RAHMAN
132411026
PROGRAM STUDI D-III METROLOGI DAN INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Sistem Penyiraman Otomatis dan Pengusir Hama pada Sawah Berbasis Arduino Uno
Kategori : Tugas Akhir
Nama : Derry Aulia Rahman NIM : 132411026
Program Studi : D-III Metrologi dan Instrumentasi Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam (MIPA) USU
Diluluskan di Medan, Juli 2016
Komisi Pembimbing: Diketahui/disetujui oleh
Ketua Prodi D-III Metrologi dan Instrumentasi Pembimbing FMIPA USU
Dr. Diana A. Barus, M.Sc Dr. Diana A. Barus, M.Sc NIP. 19660729 199203 2 002 NIP.19660729 199203 2 002
PERNYATAAN
SISTEM PENYIRAMAN OTOMATIS DAN PENGUSIR HAMA PADA SAWAH BERBASIS ARDUINO UNO
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2016
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang, dengan limpah karunia-Nya penulis dapat menyelesaikan penyusunan tugas akhir ini dengan judul Sistem Penyiraman Otomatis dan Pengusir Hama pada Sawah Berbasis Arduino Uno.
SISTEM PENYIRAMAN OTOMATIS DAN PENGUSIR HAMA PADA SAWAH BERBASIS ARDUINO UNO
ABSTRAK
Alat ini dibuat untuk meyiram tanaman padi sebagai penyejuk dan juga sebagai pengusir hama seperti burung-burung kecil atau tikus. Alat ini menggunakan sensor suhu dan kelembaban serta motor servo. Penyiraman yang dilakukan alat tersebut mengacu pada hasil deteksi sensor tersebut sedangkan pengusir hama dibuat menyerupai sayap burung yang digerakkan oleh motor servo. Motor servo merupakan komponen penggerak yang bergerak dengan motor DC, serangkaian gear, potensio meter dan rangkain kontrol. Pengendali utama pada alat ini menggunakan Arduino Uno. Suhu dan kelembaban yang dideteksi sensor akan diolah arduino menghidupkan pompa air untuk menyemprot air. Komponen lainnya yang mendukung alat ini adala h LCD, Relay, sensor DHT22 pompa air dan Arduino Uno.
AUTOMATIC WATERING SYSTEM AND BUG REPPELENT IN THE FIELDS RICE BASED ARDUINO UNO
ABSTRACT
This tools made for watering plants rice as conditioning and bug reppelent as small birds or rat. This tools uses temperature and humidity sensors as well as servo motors. Watering is done the tool reffring to the result of the sensor detection. Where the bug reppelent made to resemble a birds wings driven by servo motors. A servo motors drive components that move with DC motor, series gear, potentiometer and the control circuit more. Imitation using mounted the servo motor will move 180˚ up down interval 15 minutes. The movement can
make birds and rat gone in the fields. The main controller on this tools use Arduino Uno. Temperature and humidity sensor is detected will be processed Arduino to turn on the water pump to the spray water. Other components that support these tools are LCD, Relay, Sensor DHT22 and Arduino Uno.
DAFTAR ISI
BAB II TINJAUAN PUSTAKA……… 5
2.1 Sawah...………...……….…………... 5
2.1.1 Definisi Sawah...………...………. 5
2.1.2 Jenis dan Karakteristik Sawah...….. 5
2.1.3 Tanaman Padi...……….… 6
2.3 Hardware Arduino...……….. 19
2.4 Software Arduino...………….. 20
2.5 Masing-masing Sumber Daya dan Tegangan Arduino...23
2.6 LCD (Liquid Crystal Display)……...………...……….. 23
BAB III METODE PENELITIAN…………...……….… 32
3.1 Diagram Blok Rangkaian……… 32
3.1.1Fungsi-fungsi Diagram Blok………...……. 33
3.2 Rangkaian Arduino Uno...…....……… 33
3.3 Rangkaian Sensor DHT22...………...………….. 34
3.4 Rangkaian Driver Relay dan Pompa...…...………..……35
3.5 Rangkaian Power Supply...………...……… 36
3.6 Rangkaian LCD...………...………. 37
3.7 Rangkaian Motor Servo……… 37 3.8 Flowchart Sistem...………....….. 39
BAB IV HASIL DAN PEMBAHASAN……….…. 40
4.1 Pengujian Rangkaian Arduino Uno...…...…………...………. 40
4.2 Pengujian Rangkaian Sensor DHT22...41
4.3 Pengujian Rangkaian Relay dan Pompa....………...……….….. 44
4.4 Pengujian Rangkaian LCD………...……….… 45
4.5 Pengujian Motor Servo...……….……...……….…. 46
BAB V KESIMPULAN DAN SARAN………..….…… 51
5.1 Kesimpulan………..……….….. 51
5.2 Saran………..………….…… 52
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.1 Sawah Irigasi...………...…….… 5
Gambar 2.2 Sawah ditanami Padi...……….… 7
Gambar 2.3 Tanaman Padi…………..……….……… 12 Gambar 2.4 Bagian Mikrokontroler……….. 16 Gambar 2.5 Hardware Arduino……….………...… 19 Gambar 2.6 LCD 2x16……….……… 24
Gambar 2.7 Gambar dan Lambang Resistor………....………… 26
Gambar 2.8 Motor Servo...……….……… 27 Gambar 2.9 Sensor DHT22.../…..………..……….…….…. 30
Gambar 2.10 Pompa Air...……….…… 31
Gambar 3.1 Diagram Blok Sistem...……….……. 32
Gambar 3.2 Rangkaian Arduino Uno.……….…....… 33
Gambar 3.3 Rangkaian Sensor DHT22...……….…... 34