MIKROKONTROLER AT89C2051
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
OLOAN YOSEF SIREGAR NIM. 082408008
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA MEDAN
PERSETUJUAN
JUDUL : APLIKASI PERANCANGAN PENGELOLAAN PARKIR
MENGGUNAKAN MIKROKONTROLER AT89C2051
KATEGORI : TUGAS AKHIR
NAMA : OLOAN YOSEF SIREGAR NIM : 082408008
PROGRAM STUDI : FISIKA INSTRUMENTASI DEPARTEMEN : FISIKA
FAKULTAS : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
Diluluskan di: Medan, 15 Agustus 2013
Disetujui oleh:
Diketahui:
Ketua Program Studi D-3 Pembimbing Fisika Instrumentasi
PERNYATAAN
APLIKASI PERANCANGAN HARDWARE
PARKIR MENGGUNAKAN MIKROKONTROLER AT89C2051
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 15 Agustus 2013
PENGHARGAAN
Segala puji syukur bagi Tuhan Yang Maha Kuasa karena atas berkat kasih karunia-Nya, sehingga penulis dapat menyelesaikan laporan Tugas Akhir dala waktu yang telah ditetapkan.
Tugas akhir ini disusun untuk melengkapi persyaratan dalam mencapai gelar Ahli Madya pada Program Studi Diploma Tiga (III) Fisika Instrumentasi Departemen Fisika Faskultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Ada pun judul tugas akhir ini adalah:
“APLIKASI PERANCANGAN PENGELOLAAN PARKIR MENGGUNAKAN MIKROKONTROLER AT89C2051”
Penulis menyadari bahwa tersusunnya Tugas Akhir ini dari Doa, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Kedua orang tua penulis B. Siregar dan Ibu tercinta T. Br Pasaribu yang telah memberikan bantuan moril maupun materil, semangat dan doa yang begitu besar kepada penulis.
2. Ibu Dr. Susilawati, M.Si, selaku Ketua Program Studi Fisika Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
3. Bapak Dr. Perdinan Sinuhaji, M.S, selaku Sekretaris Program Studi Fisika Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
4. Bapak Drs. Syahrul Humaidi, M.Sc, selaku dosen pembimbing, yang telah banyak membantu dan mendukung penulis dalam menyelesaikan Tugas Akhir ini.
5. Seluruh Dosen dan Karyawan Program Studi Diploma Tiga (III) Fisika Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
6. Abangda Andika Siregar, yang telah banyak membantu dan mendukung penulis dalam menyelesaikan Tugas Akhir ini.
8. Rekan – rekan seperjuangan Keluarga Besar Fiska Instrumentasi yang telah membantu dan mendukung penulis dalam menyelesaikan Tugas Akhir ini.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Tugas Akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan Tugas Akhir ini.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Medan, 15 April 2013 Hormat saya,
ABSTRAK
Kajian ini bertujuan untuk memanfaatkan sensor inframerah untuk mendeteksi lahan parkir yang kosong dan juga dapat mengetahui sisa jumlah mobil yang dapat ditampung, dan membuat sistem monitoring menggunakan mikrokontroler AT89C2051 dan antar muka sensor inframerah dengan komputer.
Ada terdapat 5 buah sensor yang mendeteksi lalu lintas pada alat ini. Kelima sensor itu masing-masing ditempatkan di gerbang, di pintu masuk ke lahan parkir lantai 1, di pintu masuk ke lahan parkir lantai 2, di pintu keluar lahan parkir lantai 1, dan pintu keluar lahan parkir lantai 2.
DAFTAR ISI
Persetujuan ……… ii
Pernyataan ………. iii
Pengahargaan ……… iv
Abstrak ……….. vi
Daftar Isi ……… vii
Daftar Gambar …...……… ix
Daftar Tabel ...……… x
BAB I PENDAHULUAN ……… 1
1.1. Latar Belakang ……….………….. 1
1.2. Tujuan ……… 2
1.3. Batasan ………..……….. 2
1.4. Sistematika Penulisan ……….……. 2
BAB II LANDASAN TEORI ………...………… 5
2.1. Mikrokontroler dan Mikroprosesor ……… 5
2.1. 1 Mikrokontroler AT89C2051 ……….. 8
2.1. 2 PIN Mikrokontroler AT89C2051 .……….. 9
2.2. Photodioda ……….. 12
2.3. Kapasitor ………. 13
2.4. Transistor ……… 14
2.5. Motor Stepper ……….. 16
BAB III PERANCANG SISTEM ………...………….. 19
3.1. Diagram Blok Rangkaian …………...………. 19
3.2. Rangkaian Power Supplay …………..……… 21
3.3. Sistem Minimum Mikrokontroler AT89C2051 ……..…… 22
3.4. Rangkaian Display 7 Segmen …………..………... 23
3.6. Rangkaian Sensor ………...………. 26
3.7. Perancangan Driver penggerak Motor Stepper (Jembatan H) ………..……….…... 30
BAB IV PENGUJIAN RANGKAIAN ……… 33
4.1. Pengujian Rangkaian Power Supply ………. 33
4.2. Pengujian Rangkaian Mikrokontroler AT89C2051 ……... 33
4.3. Pengujian Rangkaian Relay ……… 34
4.4. Pengujian Rangkaian Sensor ………. 34
4.5. Pengujian Rangkaian Display 7 Segmen ………... 34
4.6. Analisa Program ………. 35
BAB V KESIMPULAN DAN SARAN ………... 41
5.1. Kesimpulan ………. 41
5.2. Saran ……… 41
DAFTAR GAMBAR
2.1. Diagram Blok AT89C2051 ………. 9
2.2. Susunan Pin AT89C2051 ………. 9
2.3. Skema kapasitor ………... 14
2.4. Diagram Motor Stepper ……… 17
2.5. Pemberian data/pulsa pada motor stepper ……… 18
3.1. Diagram Blok Rangkaian ……….. 19
3.2. Rangkaian Power Supplay (PSA) ………. 21
3.3. Rangkaian Minimum AT89C2051 ……… 22
3.4. Rangkaian Skematik Display 7 Segmen ………... 24
3.5. Rangkaian Relay ……… 25
3.6. Rangkaian Pemancar Inframerah ………... 27
3.7. Rangkaian Sensor Kode Batang ……… 28
DAFTAR TABEL
ABSTRAK
Kajian ini bertujuan untuk memanfaatkan sensor inframerah untuk mendeteksi lahan parkir yang kosong dan juga dapat mengetahui sisa jumlah mobil yang dapat ditampung, dan membuat sistem monitoring menggunakan mikrokontroler AT89C2051 dan antar muka sensor inframerah dengan komputer.
Ada terdapat 5 buah sensor yang mendeteksi lalu lintas pada alat ini. Kelima sensor itu masing-masing ditempatkan di gerbang, di pintu masuk ke lahan parkir lantai 1, di pintu masuk ke lahan parkir lantai 2, di pintu keluar lahan parkir lantai 1, dan pintu keluar lahan parkir lantai 2.
1.1.
Latar Belakang
Kemajuan teknologi dibidang elektronika dewasa ini berkembang sangat pesat sekali dan berpengaruh dalam pembuatan alat-alat canggih, yaitu alat yang dapat bekerja secara otomatis dan memiliki ketelitian tinggi dengan bantuan mikrokontroler. Ada beberapa macam kontroler yang dapat digunakan, namun yang saat ini yang paling banyak digunakan adalah mikroprosesor.
Sistem mikroprosesor tidak dapat bekerja sendiri tanpa didukung oleh internal system (Software) dan eksternal system (Hardware). Apabila sebuah mikroprosesor dikombinasikan dengan memori (ROM/RAM) dan unit-unit I/O maka akan dihasilkan sebuah mikrokomputer. Kombinasi ini dapat dibuat dalam satu level chip yaitu chip mikrokomputer atau sering juga disebut mikrokontroler.
Penggunaan sebagai unit-unit kendali sudahlah sangat luas. Hal ini dikarenakan peralatan-peralatan yang dikontrol secara elektronik lebih banyak memberi kemudahan-kemudahan dalam penggunaannya.
1.2.
Tujuan
a. Memanfaatkan sensor inframerah untuk mendeteksi lahan parkir yang kosong dan juga dapat mengetahui sisa jumlah mobil yang dapat ditampung.
b. Membuat sistem monitoring menggunakan mikrokontroler AT89C2051 dan antar muka sensor inframerah dengan komputer.
1.3.
Batasan
Mengingat pembahasan dalam perencanaan alat yang dibuat dapat meluas, maka tulisan ini mempunyai batasan sebagai berikut:
a. Alat yang dibuat berbasis mikrokontroler.
b. Mikrokontroler yang digunakan adalah AT89C2051.
c. Sensor yang digunakan adalah sensor photodioda yang peka terhadap sinar inframerah.
1.4.
Sistematika Penulisan
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, batasan masalah, tujuan pembahasan, dan sistematika.
BAB II : LANDASAN TEORI
Landasan teori, dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang Mikrokontroler AT89C2051 (hardware dan software), bahasa program yang digunakan BASCOM.
BAB III : PERANCANGAN SISTEM
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroler AT89C2051.
BAB IV : PENGUJIAN RANGKAIAN
BAB V : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem. Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system. Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya.
2.1.
Mikrokontroler dan Mikroprosesor
Mikrokontroler merupakan suatu terobosan teknologi mikrokontroler dan mikrokomputer menjadi kebutuhan pasar dan teknologi baru. Sebagai teknologi baru, yaitu teknik semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara missal (dalam jumlah yang banyak) sehingga harga menjadi murah (dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk memenuhi selera industri dan para konsumen akan kebutuhan pada alat-alat bantu mainan yang lebih canggih.
kendali elektronika, orang yang hendak mengetahui tinggi badannya cukup berdiri di depan alat, dan secara otomatis alat tersebut akan mengukur dan menampilkannya pada display, yang semua itu bisa diperoleh dari mikrokontroler yang digunakan.
Mikrokontroler adalah satu keeping IC dimana terdapat mikroprosesor dan memori program (ROM) serta memori serbaguna (RAM), bahkan ada beberapa jenis mikrokontroler yang memiliki fasilitas ADC, PPL, EEPROM dalam suatu kemasan. Penggunaan mikrokontroler dalam bidang kontrol sangat luas dan popular. Ada beberapa vendor yang membuat mikrokotroler diantaranya Intel, Microchip, Windbond, Atmel, Philips, Xemics dan lain-lain buatan Atmel.
Mikrokontroler merupakan sebuah sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan personal computer yang memiliki beragam fungsi. Mikrokontroler dapat dikelompokan dalam satu keluarga, masing– masing mikrokontroler memiliki spesifikasi tersendiri namun cocok dalam pemrogramannya.
Contoh dari keluarga mikrokontroler :
a. Keluarga MCS-51 b. Keluarga MC68HC05 c. Keluarga MC68HC11 d. Keluarga AVR e. Keluarga PIC 8
media penyimpanan program dan data, karena pada sebuah chip tersedia RAM (Random Access Memory) dimana data dan program ini digunakan oleh logic chip dalam menjalankan prosesnya.
Chip sering diidentikan dengan kata mikroprocesor. Mikroprocesor adalah bagian dari CPU (Central Procesor Unit) yang terdapat pada komputer tanpa adanya memori, I/O yang dibutuhkan oleh sebuah sistem yang lengkap. Selain 4 microprocesor ada dua buah chip lagi yang dikenal dengan nama mikrocomputer. Berbeda dengan microprocesor, pada microcomputer ini telah tersedia I/O dan memori. Dengan kemajuan teknologi dan perkembangan chip yang pesat sehingga saat ini didalam sekeping chip terdapat CPU memory dan control I/O. Chip jenis ini sering disebut microcontroller.
Perbedaan lain antara mikrokontroler dengan komputer adalah perbandingan ROM (Read Only Memory) dan RAM (Random Access Memory) yang sangat besar antara mikrokontroler dengan komputer. Dalam mikrokontroler ROM (Read Only Memory) jauh lebih besar dibandingkan dengan RAM (Random Access Memory), sedangkan dalam komputer atau PC, RAM (Random Access Memory) jauh lebih besar dibanding ROM (Read Only Memory). Mikrokontroler memiliki kemampuan untuk mengolah serta memproses data sekaligus juga dapat digunakan sebagai unit kendali, maka dengan sekeping chip yaitu mikrokontroler kita dapat mengendalikan suatu alat.
lagi menambahnya lagi. Pada dasarnya struktur dari mikroprocesor memiliki kemiripan dengan mikrokontroler.
2.1.1
Mikrokontroler AT89C2051
Mikrokontroler AT89C2051 adalah kelompok mikrokontroler dengan informasi ROM atau EPROM, yang dikeluarkan oleh ATMEL, dengan keistimewaan sebagai berikut:
a. Memiliki satu buah unit pemrosesan pusat 8 bit, b. Memiliki Internal Oscillator dan Timing Circuit, c. Memiliki Internal RAM sebesar 128 byte,
d. Memiliki Programmable I/O port yang terdiri atas 15 buah jalur I/O, e. Memiliki dua buah Timer/Counter 16 bit,
f. Memiliki lima buah jalur interupsi,
g. Memiliki satu buah serial I/O port dengan Serial Control, h. Kemampuan untuk melakukan operasi Boolean,
i. Memiliki 2 Kbyte sistem Flash Memory,
j. Frekuensi kerja antara 0 Hz sampai dengan 24 Hz.
Gambar 2.1 Diagram Blok AT89C2051
2.1.2
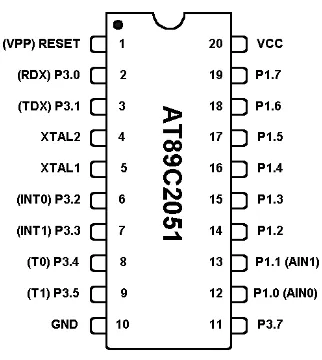
Pin Mikrokontroler AT89C2051
Susunan pin Mikrokontroler AT89C2051 diperlihatkan pada gambar 2.2 di bawah ini:
Penjelasan dari masing-masing pin adalah sebagai berikut:
a. Port 1 (pin 12 sampai dengan 19) adalah port paralel 8-bit dua arah
(bidirectional) yang dapat digunakan untuk berbagai keperluan.
b. Port 1.2 samapai dengan 1.7 dilengkapu dengan internal Pull-ups,
sedangkan port 1.0 dan 1.1 memerlukan eksternal pull-ups, port ini juga melayani inputan positif (AIN0) dan inputan negatif (AIN1).
c. Pin 1 adalah pin masukan untuk reset. Perubahan pulsa dari rendah ke tinggi pada pin ini membuat CPU menghentikan semua kegiatan dan kembali ke keadaan awal untuk menjalankan program dari awal.
d. Pin 2 sampai dengan 17 (port 3) adalah port paralel 8-bit dua arah yang memiliki fungsi pengganti, yaitu:
1) P3.0 sebagai pin RxD, yaitu pin input data serial (Serial Data Receiver) untuk komunikasi serial,
2) P3.1 sebagai pin TxD, yaitu pin input data serial (Serial Data Transmitter) untuk komunikasi serial,
3) P3.2 (INT0), input interupsi eksternal 0, 4) P3.3 (INT1), input interupsi eksternal 1,
5) P3.4 (T0), input eksternal untuk timer 0 atau counter 0, 6) P3.5 (TI), input eksternal untuk timer 1 atau counter 1,
f. Pin 5 (XTAL2) adalah pin keluaran ke rangkaian osilator internal. Pin ini dapat dipakai bila menggunakan osilator kristal,
g. Pin 10 (Ground) untuk dihubungkan ke ground,
h. Pin 20 (Vcc) dihubungkan ke Vcc (+5 Volt).
Mikrokontroler AT89C2051 mempunyai 20 kaki, 16 kaki diantaranya digunakan sebagai port paralel. Satu port paralel terdiri dari 8 kaki, dengan demikian 16 kaki tersebut membentuk 2 buah port paralel, yaitu port 1 dan port 3.
a) Port 1
Port 1merupakan port I/O dwi-arah yang dilengkapi dengan pull-up
internal. Penyangga keluaran Port 1 mampu memberikan atau menyerap arus empat masukan TTL (sekitar 1,6 mA).
Jika ‘1’ dituliskan pada kaki-kaki port1, maka masing-masing kaki akan di-pull-high dengan pull-up internal sehingga dapat digunakan sebagai masukan. Sebagai masukan, jika kaki-kaki port 1 dihubungkan ke ground
(di-Pulled Low), maka masing-masing kaki akan memberikan arus
(source) karena di-pulled high secara internal. Port 1 juga menerima alamat bagian rendah (low-byte) selama pengisian program dan verifikasi
Flash.
b) Port 3
Jika ‘1’ dituliskan ke kaki-kaki port 3, maka masing-masing kaki akan di pull high dengan pull-up internal sehingga dapat digunakan sebagai masukan. Sebagai masukan, jika kaki-kaki port 3 dihubungkan ke ground (di-pull low), maka masing-masing kaki akan memberikan arus (source) karena di-pulled high secara internal[1].
2.2.
Photodioda
Pengertian : piranti semikonduktor dengan struktur p-n atau p-i-n untuk mendeteksi cahaya.
Photodiada biasanya digunakan untuk mendeteksi cahaya. Photodioda adalah piranti semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisam intrinsik antara lapisan n dan p. Piranti yang memiliki lapisan intrinsik disebut p-i-n atau PIN photodioda. Cahaya diserap didaerah pengembangan atau daerah intrinsik menimbulkan pasangan electron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari cahaya.
Mode Operasi
Photodioda dapat dioperasikan dalam 2 mode yang berbeda:
a. Mode photovoltaik: seperti solar sel, penyerapan pada photodioda menghasilkan tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga cahaya ini sedikit linier, dan range perubahannya sangat kecil.
pada diode tidak akan menghantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus photo (hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol).
Ketergantungan arus photodioda pada kekuatan cahaya dapat sangat linier.
Karakteristik bahan photodioda:
• Silikon (Si): arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus antara 400 nm sampai 1000 nm (terbaik antara 800 sampai 900 nm).
• Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas yang bagus antara 600 nm sampai 1800 nm (terbaik 1400 sampai 1500 nm).
• Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi sensitivitas baik pada jarak 800 nm sampai 1700 nm (terbaik antara 1300 sampai 1600 nm).
2.3.
Kapasitor
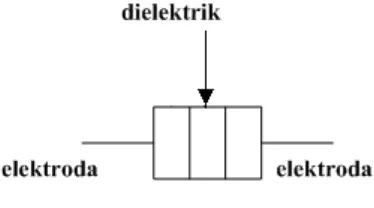
menuju ujung kutub negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif karena terpisah oleh bahan elektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada konduktif pada ujung-ujung kakinya. Di alam bebas phenomena kapasitor terjadi pada saat terkumpulnya muatan-muatan positif dan negatif diawan.
Gambar 2.3 Skema kapasitor
Kapasitor merupakan komponen pasif elektronika yang sering dipakai didalam merancang suatu sistem yang berfungsi untuk menyimpan arus listrik. Didalamnya 2 buah plat elektroda yang saling berhadapan dan dipisahkan oleh sebuah insulator. Sedangkan bahan yang digunakan sebagai insulator dinamakan dielektrik. Ketika kapasitor diberikan tegangan DC maka energi listrik disimpan pada setiap eletrodanya. Selama kapasitor melakukan pengisian, arus mengalir. Aliran arus tersebut akan berhenti bila kapasitor telah penuh. Yang membedakan tiap-tiap kapasitor adalah dielektriknya.
2.4.
Transitor
dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), mumungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Transitor memiliki 3 terminal, dalam rangkaian analog, transistor digunakan dalam amplifier (penguat). Alat analog melingkupi pengeras suara, sumber listrik stabil, dan penguat sinyal radio. Dalam rangkaian-rangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi. Beberapa transistor juga dapat dirangkai sedemikian rupa sehingga berfungsi sebagai logic gate, memori dan komponen-komponen.
Ada dua tipe dasar transistor yaitu:
a. Bipolar Junction Transistor (BJT atau transistor bipolar) b. Field Effect Transistor (FET).
Transistor bipolar dinamakan demikian karena kanal konduksi utamanya menggunakan dua polaritas pembawa muatan: electron dan lubang, untuk membawa arus listrik. Dalam BJT, arus listrik utama harus melewati satu daerah/lapisan pembatas dinamakan depletion zone, dan ketebalan lapisan ini dapat diatur, dengan kecepatan tinggi dengan tujuan untuk mengatur aliran arus utama tersebut.
dirubah dengan perubahan tegangan yang diberikan, untuk mengubah ketebalan kanal konduksi tersebut. Lihat artikel untuk masing-masing tipe untuk penjelasan yang lebih lanjut.
Secara umum, transistor dapat dibeda-bedakan berdasarkan banyak kategori:
a. Materi semikonduktor: Germanium, Silikon, Gallium Arsenide.
b. Kemasan fisik: Through Hole Metal, Through Hole Plastic, Surface Mount, IC, dan lain-lain.
c. Tipe: UJT, BJT, JFET, IGFET (MOSFET), IGBT, HBT, MISFET, VMOSFET, MESFET, HEMT, SCR serta pengembangan dari transistor yaitu IC (Integrated Circuit) dan lain-lain.
d. Polaritas: NPN atau N-channel, PNP atau P-channel. Maximum kapasitas daya: Low Power, Medium Power, High Power.
e. Maximum frekuensi kerja: Low, Medium atau High Frequency, RF transistor, Microwave, dan lain-lain.
2.5.
Motor Stepper
Aplikasi penggunaan motor stepper dapat juga dijumpai dalam bidang industri atau untuk jenis motor stepper kecil dapat digunakan dalam perancangan suatu alat mekatronik atau robot. Motor stepper berukuran besar digunakan, misalnya, dalam proses pengeboran logam yang menghendaki ketetapan posisi pengeboran, dalam hal ini dilakukan oleh sebuah robot yang memerlukakan ketetapan posisi dalam gerakan lengannya dan lain-lain.
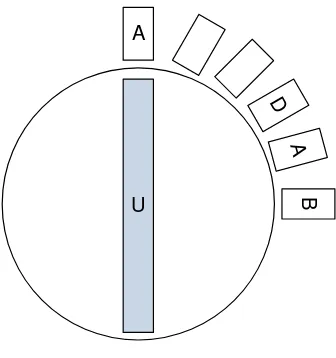
Pada gambar dibawah ini ditunjukkan dasar susunan sebuah motor stepper
U A
D
A
B
Gambar 2.4 Diagram Motor Stepper
dapat dihindari. Sehingga tidak diperlukan umpan balik (feedback) pada pengendali motor stepper.
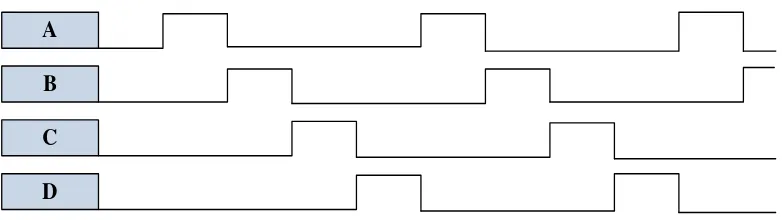
Motor stepper yang akan digunakan memiliki 4 fase (pole atau kutub), pengiriman pulsa dari mikrokontroler ke rangkaian motor stepper dilakukan secara bergantian, masing-masing 4 data (sesuai dengan jumlah phase-nya), sebagian ditunjukkan pada gambar dibawah ini:
A
B
C
D
BAB III
PERANCANGAN SISTEM
3.1.
Diagram Blok Rangkaian
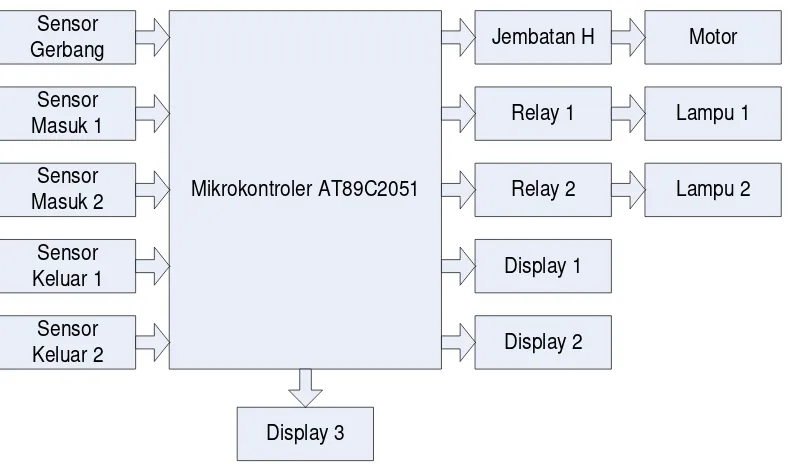
Berikut ini adalah diagram blok dari alat yang dirancang:
Sensor Masuk 1 Sensor Gerbang
Sensor Masuk 2
Sensor Keluar 1
Sensor Keluar 2
Mikrokontroler AT89C2051
Jembatan H
Relay 1
Relay 2
Display 1
Display 2
Display 3
Motor
Lampu 1
[image:30.595.116.511.287.519.2]Lampu 2
Gambar 3.1 Diagram Blok Rangkaian
Sensor pada gerbang masuk berfungsi untuk mendeteksi adanya kendaraan yang masuk melalui gerbang utama. Sensor pada pintu masuk lahan parkir lantai 1 digunakan untuk mendeteksi kendaraan yang masuk ke lahan parkir lantai 1. Sensor pada pintu masuk lantai 2 digunakan untuk mendeteksi kendaraan yang masuk ke lahan parkir lantai 2. Sedangkan sensor yang ditempatkan pada pintu keluar pada masing-masing lantai lahan parkir digunakan untuk mendeteksi kendaraan yang keluar pada masing-masing lahan parkir.
Rangkaian jembatan H digunakan sebagai sarana driver untuk menggerakkan motor. Motor ini berguna untuk menggerakkan palang pintu pada gerbang utama. Apabila lahan parkir sudah penuh, maka palang pintu ini segera diturunkan. Namun apabila ada lahan parkir yang kosong, maka palang pintu akan segera terbuka.
Masing-masing rangkaian relay digunakan untuk menyalakan atau mematikan lampu indikator pada masing-masing lahan parkir. Lampu 1 akan menyala ketika lahan parkir pada lantai 1 sudah penuh terisi. Dan lampu 2 akan menyala ketika lahan parkir pada lantai 1 sudah penuh terisi.
Lampu ini akan mati ketika sudah ada lahan parkir yang kosong.
3.2.
Rangkaian Power Supplay
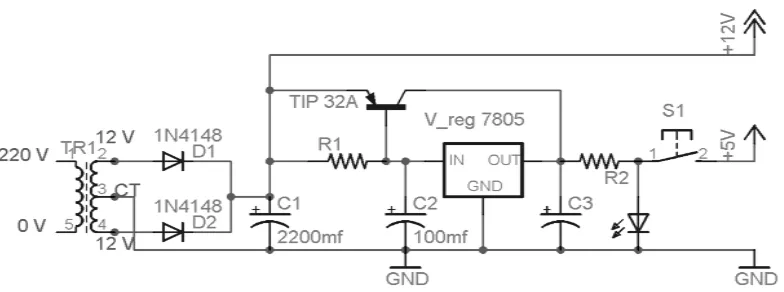
[image:32.595.113.505.313.459.2]Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluaran 5 volt digunakan untuk mensupplay tegangan keseluruh rangkaian, sedangkan keluaran 12 volt digunakan untuk mensupplay tegangan pada aplikasi tertentu, yaitu rangkaian driver motor. Rangkaian power supplay ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian Power Supplay (PSA)
(LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
3.3.
Sistem Minimum Mikrokontroler AT89C2051
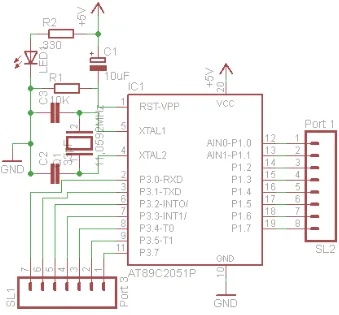
[image:33.595.146.485.356.671.2]Rangkaian ini berfungsi sebagai pusat kendali dari seluruh system yang ada. Kompoen utama dari rangkaian ini adalah IC mikrokontroler AT89C2051. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Mikrokontroler ini memiliki 15 port I/O, yaitu port 1 dan port 3. Pin 12 sampai 19 adalah Port 1, dan port 3 berada pada pin 1,2, 6, 7, 8, 9 dan 11. Pin 20 dihubungkan ke sumber tegangan 5 volt. Dan pin 10 dihubungkan ke ground. Rangkaian mikrokontroler ini menggunakan komponen kristal 11,0598 MHz sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 1 dihubungkan dengan sebuah kapasitor 10 uF yang dihubungkan ke positip dan sebuah resistor 10 Kohm yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut. Jika dihitung maka lama waktunya adalah :
10 10 1 det
t =R x C= KΩ x µF = m ik
Jadi 1 mili detik setelah power aktip pada IC kemudian program aktip.
3.4.
Rangkaian Display 7 Segmen
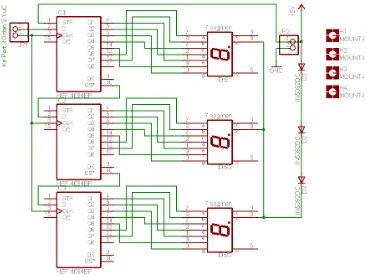
Gambar 3.4 Rangkaian Skematik Display 7 Segmen
Display ini menggunakan 3 buah seven segment yang dihubungkan ke IC HEF 4094BP yang merupakan IC serial to paralel. IC ini akan merubah 8 bit data serial yang masuk menjadi keluaran 8 bit data paralel. Rangkaian ini dihubungkan dengan P3.0 dan P3.1 AT89C2051. P3.0 merupakan fasilitas khusus pengiriman data serial yang disediakan oleh mikrokontroler AT89C2051. Sedangkan P3.1 merupakan sinyal clock untuk pengiriman data serial.
3.5.
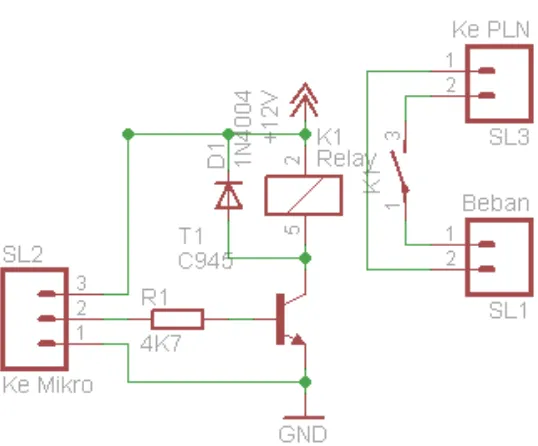
Rangkaian Relay
[image:36.595.181.450.158.381.2]Rangkaian relay dapat dilihat pada gambar dibawah ini:
Gambar 3.5 Rangkaian Relay
Komponen uttama dari rangkaian ini adalah relay. Relay ini memisahkan tegangan rendah dari rangkaian dengan tegangan tinggi dari beban yang dihubungkan dengan sumber tegangan 220 volt PLN.
Pada rangkaian ini untuk mengaktifkan atau menon-aktifkan relay digunakan transistor type NPN. Dari gambar dapat dilihat bahwa negative relay dihubungkan ke kolektor akan terhubung ke emitor dimana emitor langsung terrhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mwngakibatkan relay aktif. Sebaliknya jika transistor tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 12 volt, keadaan ini menyebabkan tidak aktif
Kumparan pada relay akan menghasilkam tegangan singkat yang besar ketika relay dinon-aktifkan dan ini dapat merusak transistor yang ada pada rangkaian ini. Untuk mencegah kerusakan pada transistor tersebut sebuah dioda harus dihubungkan ke relay tersebut . Dioda dihubungkan secara terbalik sehingga secara normal dioda ini tidak menghantarkan. Penghantaran hanya terjadi ketika relay dinonaktifkan, pada saat ini arus akan terus mengalir melalui kumparan dan arus ini akan dialirkan ke dioda. Tanpa adanya dioda arus sesaat yang besar itu akan mengalir ke transistor, yang mengakibatkan kerusakan pada transistor.
3.6.
Rangkaian Sensor
Untuk memeriksa ada tidaknya kendaraan yang melintas pada tiap pintu masuk, digunakan lah 3 buah sensor inframerah. Sensor ini terdiri dari pasangan LED pemancar inframerah dan potodioda.
AT89C2051. Dengan demikian, ketika sinyal low ini diterima oleh mikrokontroler, maka ini menandakan adanya kendaraan yang melintas didepan sensor. Mikrokontroler akan menghitung kendaraan tersebut.
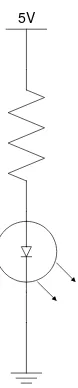
Rangkaian pemancar inframerah tampak seperti gambar di bawah ini:
[image:38.595.283.322.218.412.2]
Gambar 3.6 Rangkaian Pemancar Inframerah
Pada rangkaian di atas digunakan 1 buah LED inframerah. Resistor yang digunakan adalah 100 ohm sehingga arus yang mengalir pada LED inframerah adalah sebesar:
Dengan besarnya arus yang mengalir ke LED inframerah, maka intensitas pancaran inframerah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin jauh.
Pantulan dari sinar inframerah akan diterima oleh photodioda, kemudian akan diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika photodioda menerima pantulan sinar inframerah maka output dari rangkaian penerima ini akan mengeluarkan logika low (0), namun jika photodioda tidak menerima pantulan sinar inframerah, maka output dari rangkaian penerima akan mengeluarkan logika high (1). Rangkaian penerima inframerah seperti gambar di bawah ini: 100 K 10 K 300 Ohm 47 K 100 K
10 K 10 K
[image:39.595.122.505.290.462.2]10 K C 945 C 945 + -+ -+ 5V 10 K + 5V + 5V
Gambar 3.7 Rangkaian Penguat Sensor Inframerah
Rangkaian ini menggunakan IC LM 358 sebagai penguat tegangan yang dihasilkan photodioda. Satu buah IC ini memiliki dua penguat operasional (op-amp). Pada rangkaian ini, kedua op-amp tersebut digunakan. Sehingga sinyal dari photo dioda mengalami dua kali penguatan.
kali
A
KK2
10
20
=
=
Sebuah photodioda memiliki nilai tahanan sekitar 15 s.d. 20 MOhm jika tidak terkena sinar inframerah, dan memiliki nilai tahanan sekitar 80 s.d. 300 KOhm jika terkena sinar inframerah, tergantung dari intensitas sinar inframerah yang diterimanya.
Dengan demikian, besar tegangan yang masuk ke op-amp adalah:
Saat tidak terkena sinar inframerah:
V V
K M
K
Vo 5 0,01
47 20
47 × =
+ =
Saat terkena sinar inframerah:
6 , 0 5 47 300
47 × =
+ = V K K K Vo
Tegangan tersebut diumpankan pada op-amp dengan faktor penguatan 2 kali, sehingga tegangan keluarannya pada saat terkena sinar inframerah sekitar 0,12 Volt, sedangkan saat tidak terkena sinar inframerah sekitar 0,02 Volt. Namun, tegangan ini masih diumpankan lagi pada op-amp yang kedua. Dengan faktor penguatan yang sama, didapat tegangan keluaran saat terkena sinar inframerah sekitar 0,24 Volt dan saat tidak terkena inframerah sekitar 0,04 Volt. Tegangan inilah yang selanjutnya diumpankan ke basis transistor C945.
sinar iframerah), transistor aktif. Aktifnya transistor ini akan menyebabkan mikrokontroler mendapatkan logika low dan LED indikator akan mati. Hal sebaliknya akan berlaku ketika photodioda tidak mendapatkan pantulan sinar inframerah.
3.7.
Perancangan Driver penggerak Motor Stepper
(Jembatan H)
Rangkaian untuk mengendalikan perputaran motor stepper pada alat ini adalah sebuah rangkaian yang dikenal dengan jembatan H. Jembatan H ini terdiri dari 4 buah transistor, dimana 2 buah transistor bertipe NPN dan 2 buah transistor lagi bertipe PNP. Ke-4 transistor ini dirangkai sedemikian rupa sehingga dengan memberikan sinyal low atau high pada rangkaian maka perputaran motor dapat diatur. Gambar rangkaiannya ditunjukkan pada gambar berikut ini:
Vcc
Vcc
Vcc
Vcc
Motor 330 Ohm 330 Ohm 330 Ohm 330 Ohm TIP127 TIP127 C945 TIP122 TIP122 C945 C945 C945 1 K
1 K 1 K
1 K 18 Ohm
18 Ohm 18 Ohm
18 Ohm
[image:41.595.146.501.454.673.2]P0.0 P0.1
Pada rangkaian di atas, jika P0.0 diset high yang berarti P0.0 mendapat tegangan 5 volt, maka kedua transistor tipe NPN C945 yang disebelah kiri akan aktip. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan mendapat tegangan 0 volt dari ground. Kolektor dari transistor C945 yang berada di sebelah kiri atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktip (transistor tipe PNP akan aktip jika tegangan pada basis lebih kecil dari 4,34 volt). Aktifnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke emitor sehingga kolektor mendapatkan tegangan 5 volt dari Vcc.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktip (transistor tipe NPN akan aktip jika tegangan pada basis lebih besar dari 0,7 volt). Karena transistor TIP 122 ini tidak aktip, maka kolektornya tidak terhubung ke emitor, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang mendapatkan tegangan 5 volt dari Vcc, maka kolektor dari TIP 122 juga mendapatkan tegangan yang sama.
tegangan 5 volt dari Vcc. Kolektor dari transistor C945 yang berada di sebelah kanan atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 5 volt yang menyebabkan transistor ini tidak aktif. Akibat transistor PNP TIP 127 tidak aktip maka kolektornya tidak terhubung ke emitor sehingga kolektor tidak mendapatkan tegangan 5 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini menjadi aktif. Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
BAB IV
PENGUJIAN RANGKAIAN
4.1.
Pengujian Rangkaian Power Supply
Pengujian rangkaian ini dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Setelah itu rangkaian power supply dihubungkan ke sumber arus listrik dan saklar ON/OFF nya diaktifkan ke posisi ON.
4.2.
Pengujian Rangkaian Mikrokontroler AT89C2051
Untuk mengetahui apakah rangkaian mikrokontroller AT89C2051 telah bekerja dengan baik, maka dilakukan pengujian. Pengujian bagian ini dilakukan dengan memberikan program sederhana pada mikrokontroler AT89C2051. Programnya adalah sebagai berikut:
$regfile = "89C2051.DAT" $crystal = 11059200 Do
Set p3.7 Waitms 50 Reset p3.7 Waitms 50 Loop End
4.3.
Pengujian Rangkaian Relay
Rangkaian ini diuji dengan cara memberikan input 5V pada inputnya. Apabila anatar kedua kontak pada relay menjadi terhubung maka rangkaian tersebut sudah dapat digunakan.
4.4.
Pengujian Rangkaian Sensor
Ketika inframerah dari LED inframerah terdeteksi oleh photodioda dari rangkaian ini, LED indikator pada rangkaian ini akan mati. Tegangan outputnya akan sebesar 0 V. Demikian sebaliknya ketika photodioda tidak terkena cahaya inframerah dari LED inframerah. LED indikator akan menyala dan tegangan outputnya sebesar 5 V. Untuk mengatur tingkat kepekaan terhadap cahaya pada rangkaian ini digunakan trimpot yang ada pada rangkaian.
4.5.
Pengujian Rangkaian Display 7 Segmen
Pengujian rangkaian ini dilakukan dengan menghubungkan rangkaian ini ke mikrokontroler. Kemudian pada mikrokontroler diisikan program sebagai berikut:
$regfile = "89C2051.DAT" $crystal = 12000000 Portdata Alias P1.3 Portklok Alias P1.2 Dim Angka As Byte Do
Angka = 255
Shiftout Portdata , Portklok , Angka , 1 Wait 1
Ketika program dieksekusi, maka display 7 segmen akan menampilkan angka 888 pada ketiga rangkaian displaynya.
4.6.
Analisa Program
BASCOM-AVR adalah program basic compiler berbasis windows untuk mikrokontroler keluarga AVR merupakan pemrograman dengan bahasa tingkat tinggi ”BASIC” yang dikembangkan dan dikeluarkan oleh MCS elektronika sehingga dapat dengan mudah dimengerti atau diterjemahkan. Dalam program BASCOM-AVR terdapat beberapa kemudahan, untuk membuat program software AT89C2501, seperti program simulasi yang sangat berguna untuk melihat, simulasi hasil program yang telah kita buat, sebelum program tersebut kita download ke IC atau ke mikrokontroler.
BASCOM-AVR menyediakan pilihan yang dapat mensimulasikan program. Program simulasi ini bertujuan untuk menguji suatu aplikasi yang dibuat dengan pergerakan LED yang ada pada layar simulasi dan dapat juga langsung dilihat pada 7-Segment.
Intruksi yang dapat digunakan pada editor Bascom-AVR relatif cukup banyak dan tergantung dari tipe dan jenis AVR yang digunakan.
Instruksi Keterangan DO ... LOOP Perulangan
GOSUB Memanggil Prosedur IF ... THEN Percabangan
FOR ... NEXT Perulangan
WAIT Waktu Tunda Detik
[image:47.595.143.481.83.367.2]WAITMS Waktu Tunda MiliDetik WAITUS Waktu Tunda MicroDetik GOTO Loncat Kealamat Memori SELECT ... CASE Percabangan
Program Keseluruhan dari Sistem Perancangan Hardwere Penglolaan Parkir Menggunakan AT89C2501 adalah sebagai berikut:
$regfile = "89C2051.DAT" $crystal = 12000000
Pindata Alias P1.3 Pinklok Alias P1.2
Relay1 Alias P1.5 Relay2 Alias P1.4
Sensor_gerbang Alias P3.7 Sensor_masuk1 Alias P3.4 Sensor_masuk2 Alias P3.5 Sensor_keluar1 Alias P3.3 Sensor_keluar2 Alias P3.2
Dim Temp As Byte
Dim Total_sat As Byte Dim Total_pul As Byte Dim Total_rat As Byte
Dim Lantai1_sat As Byte Dim Lantai1_pul As Byte Dim Lantai1_rat As Byte
Dim Lantai2_sat As Byte Dim Lantai2_pul As Byte Dim Lantai2_rat As Byte
Do
If Sensor_gerbang = 0 Then Do
Loop Until Sensor_gerbang = 1 Incr Total_sat
If Total_sat = 10 Then Incr Total_pul Total_sat = 0 End If
If Total_pul = 100 Then Incr Total_rat
Total_pul = 0 End If
Temp = Total_sat Gosub Konversi Gosub Tampil
Temp = Total_pul Gosub Konversi Gosub Tampil
Gosub Tampil
End If
If Sensor_masuk1 = 0 Then Do
Loop Until Sensor_masuk1 = 1 Incr Lantai1_sat
If Lantai1_sat = 10 Then Incr Lantai1_pul Lantai1_sat = 0 End If
If Lantai1_pul = 100 Then Incr Lantai1_rat
Lantai1_pul = 0 End If
Temp = Lantai1_sat Gosub Konversi Gosub Tampil
Temp = Lantai1_pul Gosub Konversi Gosub Tampil
Temp = Lantai1_rat Gosub Konversi Gosub Tampil
End If
If Sensor_masuk2 = 0 Then Do
Loop Until Sensor_masuk2 = 2 Incr Lantai2_sat
If Lantai2_sat = 10 Then Incr Lantai2_pul Lantai2_sat = 0 End If
If Lantai2_pul = 100 Then Incr Lantai2_rat
Lantai2_pul = 0 End If
Temp = Lantai2_sat Gosub Konversi Gosub Tampil
Temp = Lantai2_pul Gosub Konversi Gosub Tampil
Temp = Lantai2_rat Gosub Konversi Gosub Tampil
If Sensor_keluar1 = 0 Then Do
Loop Until Sensor_keluar1 = 1 Decr Lantai1_sat
If Lantai1_sat = 10 Then Decr Lantai1_pul Lantai1_sat = 0 End If
If Lantai1_pul = 100 Then Decr Lantai1_rat Lantai1_pul = 0 End If
Temp = Lantai1_sat Gosub Konversi Gosub Tampil
Temp = Lantai1_pul Gosub Konversi Gosub Tampil
Temp = Lantai1_rat Gosub Konversi Gosub Tampil
End If
If Sensor_keluar2 = 0 Then Do
Loop Until Sensor_keluar2 = 1 Decr Lantai2_sat
If Lantai2_sat = 10 Then Decr Lantai2_pul Lantai2_sat = 0 End If
If Lantai2_pul = 100 Then Decr Lantai2_rat Lantai2_pul = 0 End If
Temp = Lantai2_sat Gosub Konversi Gosub Tampil
Temp = Lantai2_pul Gosub Konversi Gosub Tampil
Temp = Lantai2_rat Gosub Konversi Gosub Tampil
End If
Loop
Konversi:
Temp = &B00000100 End If
If Temp = 1 Then Temp = &B10110111 End If
If Temp = 2 Then Temp = &B00011000 End If
If Temp = 3 Then Temp = &B00010001 End If
If Temp = 4 Then Temp = &B00100011 End If
If Temp = 5 Then Temp = &B01000001 End If
If Temp = 6 Then Temp = &B01000000 End If
If Temp = 7 Then Temp = &B00010111 End If
If Temp = 8 Then Temp = &B00000000 End If
If Temp = 9 Then Temp = &B00000001 End If
Return
Tampil:
Shiftout Pindata , Pinklok , Total_sat , 1 Shiftout Pindata , Pinklok , Total_pul , 1 Shiftout Pindata , Pinklok , Total_sat , 1
Shiftout Pindata , Pinklok , Lantai2_sat , 1 Shiftout Pindata , Pinklok , Lantai2_pul , 1 Shiftout Pindata , Pinklok , Lantai2_rat , 1
Shiftout Pindata , Pinklok , Lantai1_sat , 1 Shiftout Pindata , Pinklok , Lantai1_pul , 1 Shiftout Pindata , Pinklok , Lantai1_rat , 1
BAB V
KESIMPULAN DAN SARAN
5.1.
Kesimpulan
Dari hasil pelaksanaan perancangan alat hingga pengujian dan pembahasan system maka penulis dapat menarik kesimpulan, antara lain:
a. Motor Stepper dapat digunakan sebagai pengendali sistem mekanika yang kompleks dan bersifat otomatis yang membutuhkan rangkaian driver sebagai sarana untuk mengendalikannya.
b. Memanfaatkan sensor inframerah sebagai pendeteksi lahan parkir yang masih kosong dan juga dapat mengetahui sisa jumlah mobil yang dapat ditampung.
c. Sensor diletakkan menghadap pintu masuk dan pintu keluar, agar supaya alat ini dapat mendeteksi keberadaan kendaraan yang masuk dan keluar dari dalam lahan parkir.
5.2.
Saran
Setelah melakukan perancangan alat ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat melakukan perancangan lebih lanjut, yaitu:
a. Pada penggunaan sensor inframerah sebaiknya menggunakan sensor yang lebih peka terhadap intensitas cahaya.
DAFTAR PUSTAKA
Budiharto, Widodo & Gamayel Rizal. 2007. Belajar Sendiri 12 Proyek
Mikrokontroler Untuk Pemula. Jakarta: PT. Elex Media
Komputindo Kelompok Gramedia.
Budiharto, Widodo & Togu Jefri. 2007. 12 Proyek Sistem Akuisisi Data. Jakarta: PT. Elex Media Komputindo Kelompok Gramedia.
Iswanto. 2009. Belajar Sendiri Mikrokontroler AT90S2313 dengan BASIC Compiler. Yogyakarta: ANDI.
Setiawan, Sulhan. 2006. Mudah dan Menyenangkan Belajar Mikrokontroler. Yogyakarta: ANDI.
Sudjadi. 2005. Teori dan Aplikasi Mikrokontroler, Aplikasi pada Mikrokontroler AT89C51. Yogyakarta: Graha Ilmu.
Usman. 2008. Teknik Antar Muka dan Pemrograman Mikrokontroler
AT89S52. Yogyakarta: ANDI.
Wahyudin, Didin. 2007. Belajar Mudah Mikrokontroler AT89S52 Dengan
Bahasa BASIC Menggunakan BASCOM-8051. Yogyakarta: ANDI
Winoto, Ardi. 2008. Mikrokontroler AVR ATMega8/32/16/8535 dan Pemrogramannya dengan Bahasa C pada WinAVR.