Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
PERANCANGAN PALANG KERETA API OTOMATIS
BERBASIS MIKROKONTROLER AT89S51 MENGGUNAKAN
SENSOR INFRAMERAH SEBAGAI SENSOR HALANGAN
TUGAS AKHIR
RENOVA SIMANULLANG
062408031
PROGRAM STUDI D3 FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
PERANCANGAN PALANG KERETA API OTOMATIS
BERBASIS MIKROKONTROLER AT89S51 MENGGUNAKAN
SENSOR INFRAMERAH SEBAGAI SENSOR HALANGAN
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
PROGRAM STUDI D3 FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
PERSETUJUAN
Judul : PERANCANGAN PALANG KERETA API
OTOMATIS BERBASIS MIKROKONTROLER AT89S51 MENGGUNAKAN SENSOR
INFRAMERAH SEBAGAI SENSOR HALANGAN
Kategori : TUGAS AKHIR
Nama : RENOVA SIMANULLANG
Nomor Induk Mahasiswa : 062408031
Program Studi : DIPLOMA 3 (D3) FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Juli 2009
Komisi Pembimbing : Diketahui
Departemen Fisika FMIPA USU
Ketua, Pembimbing,
(Drs.Syarul Humaidi, M.Sc) (
NIP.132050870 NIP.131569414
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
PERNYATAAN
PERANCANGAN PALANG KERETA API OTOMATIS BERBASIS MIKROKONTROLLER AT89S51 MENGGUNAKAN SENSOR
INFRAMERAH SEBAGAI SENSOR HALANGAN
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa hal kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2009
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pengasih dan Maha Penyayang, atas Kasih Karunia-NYA yang melimpah penulis dapat menyelesaikan Tugas Akhir ini sesuai dengan waktu yang telah ditetapkan.
Ucapan terimakasih penulis sampaikan kepada berbagai pihak yang telah banyak membantu penulis dalam penyelesaian tugas ini yaitu kepada:
1. Bapak Dr.Eddy Marlianto, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam.
2. Bapak Drs.Syarul Humaidi, M.sc, selaku Ketua Jurusan Program Studi Fisika Instrumentasi Fakultas Matematika dan ILmu Pengetahuan Alam. 3. Ibu Drs.Justinon, MSi, selaku Sekretaris Jurusan Program Studi Fisika
Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam.
4. Bapak Drs.Takdir Tamba, M.Eng.Sc, selaku Dosen pembimbing Tugas Akhir.
5. Staff dan pegawai di Fakultas Matematika dan Ilmu Pengetahuan Alam. 6. Teristimewa kepada kedua orangtua penulis Ayahanda M.Simanullang
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
7. Kepada B’Sarto trimakasih atas partisipasinya juga teman-teman 1 kost Gg.Cipta no.13B yang memberikan smangat & Doa.
8. B’andika, K’Hotmaida, dan K’Susi juga abang/kakak senior yang tidak tersebutkan namanya yang telah banyak memberi semangat, pemikiran, dan Doa.
9. Personil “BIOS CORP’06”, serta teman-teman seperjuangan FIN’06, serta adik-adik FIN’07 dan FIN’08 tetap semangat.
Penulis menyadari dalam pembuatan tugas akhir ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan tugas akhir ini.
Akhir kata penulis mengucapkan banyak terimakasih kepada semua pihak yang telah turut serta membantu dalam menyelesaiakan tugas akhir ini. Tuhan selalu memberkati.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
ABSTRAK
Palang kereta api otomatis merupakan suatu otomatisasi yang diterapkan pada jalur transportasi Kereta Api guna menutup dan membuka jalan yang membatasi atau menghentikan jalur lalu lintas agar kendaraan berhenti sementara untuk mendahulukan kereta api yang akan lewat. Aplikasi ini hanyalah sebuah prototype kecil yang menggambarkan sebuah aplikasi untuk palang kereta api yang dapat bergerak secara otomatis, dibandingkan penerapan sesungguhnya aplikasi ini mungkin masih jauh sekali dari kejadian sebenarnya, akan tetapi aplikasi ini mungkin dapat sebagai dasar dari palang kereta api yang dapat berjalan secara otomatis.
Palang kereta api otomatis ini mempunyai tiga bagian umum yaitu motor DC yang akan berputar untuk membuka dan menutup palang, sensor inframerah sebagai pendeteksi adanya kereta api yang lewat, dan otak yaitu bagian mikrokonrroler AT89S51. Mikrokontroler ini yang akan mengendalikan semua jalannya system yang terdapat pada palang kereta api otomatis. Yaitu mengendalikan masukan system yang berupa sensor-sensor, mengendalikan pergerakan motor DC sebagai penggerak palang, mengendalikan sebuah tampilan berupa teks berjalan, dan pembangkit pulsa 300 Hz, 500 Hz yang dimanfaatkan sebagai Buzzer.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
DAFTAR ISI 1.1 Latar Belakang Masalah ... 1
1.2 Tujuan Penulisan ... 3
1.3 Batasan Masalah ... 3
1.4 Metode Pengumpulan Data ... 4
1.5 Sistematika Penulisan ... 4
BAB 2 LANDASAN TEORI 2.1 Perangkat Keras ... 7
2.1.1 Arsitektur Mikrokontroler AT89S51 ... 7
2.1.2 Konstruksi AT89S51 ... 9
2.1.3 Photodioda ... 16
2.1.4 Dioda Pemancar Cahaya Inframerah ... 18
2.1.5 Motor DC ... 20
2.1.6 Rangkaian Buzzer. ... 21
2.1.7 Running Text. ... 22
2.2 Perangkat Lunak ... 23
2.2.1 Bahasa Assembly MCS-51 ... 23
2.2.2 Software 8051 Editor, Assembler, simulator(IDE) ... 27
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 3 PERANCANGAN SISTEM
3.1 Perancangan Alat ... 30
3.1.2 Diagram Blok ... 30
3.1.2 Perancangan Sensor Inframerah ... 32
3.1.2.1 Perancangan Pemancar Inframerah ... 32
3.1.2.2 Perancangan Penerima Inframerah ... 34
3.1.3 Rangkaian Mikrokontroler AT89S51 ... 36
3.1.4 Rangkaian Catudaya (PSA) ... 38
3.1.5 Perancangan Driver Penggerak Motor DC ... 40
3.2 Perancangan Program ... 44
BAB 4 PENGUJIAN RANGKAIAN DAN ANALISA 4.1 Pengujian Rangkaian ... 57
4.1.1 Pengujian rangkaian Mikrokontroler At89S51 ... 57
4.1.2 Pengujian Rangkaian sensor inframerah ... 59
4.1.3 Pengujian Rangkaian Jembatan H ... 60
4.1.4 Pengujian Pangkaian PSA ... 61
4.1.5 Pengujian Rangkaian Buzzer ... 62
4.2 Analisa ... 63
BAB 5 KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 64
5.2 Saran ... 65
Daftar Pustaka
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
DAFTAR TABEL
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
DAFTAR GAMBAR
Gambar 2.1 IC mikrokontroler AT89S51 ... 12
Gambar 2.2. Photodioda dan simbolnya ... 17
Gambar 2.3. Symbol dan rangkaian dasar sebuah LED. ... 20
Gambar 2.4. Rangkaian Buzzer. ... 21
Gambar 2.5 8051 Editor, Assembler, Simulator IDE ... 28
Gambar 2.6 ISP-Flash Programmer 3.a ... 29
Gambar 3.1. Diagram Blok Rangkaian ... 30
Gambar 3.2. Rangkaian Pemancar inframerah ... 33
Gambar 3.3 Rangkaian Penerima sinar inframerah ... 34
Gambar 3.4 Rangkaian mikrokontroller AT89S51 ... 37
Gambar 3.5 Rangkaian Power Supply (PSA) ... 39
Gambar 3.6 Rangkaian jembatan H ... 41
Gambar.3.7 FlowChart Program ... 44
Gambar 4.1 Rangkaian minimum mikrokontroler AT89S51 ... 57
Gambar 4.2 Rangkaian sensor inframerah ... 59
Gambar 4.3 Rangkaian Jembatan H ... 60
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 1
PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi instrumentasi elektronika sekarang mengalami perkembangan yang sangat pesat, memasyarakat dan bukan sesuatu hal yang asing lagi. Manusia membutuhkan bantuan dari sesuatu yang dapat bekerja cepat, teliti, dan tidak mengenal lelah. Sistem otomatisasi dapat menggantikan manusia untuk mengerjakan sesuatu dalam lingkungan berbahaya bagi kesehatan dan keselamatan atau daerah yang harus diamati dengan pengamatan lebih dari kemampuan panca indera manusia. Kemajuan teknologi dalam bidang elektronika akan mampu mengatasi masalah-masalah yang rumit sekalipun, dengan ketelitian dan kecepatan serta ketepatan yang sangat tinggi.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Mikrokontroler AT89S51 adalah chip mikrokontroler produksi Atmel Inc, merupakan keluarga dari MCS-51 rancangan Intel. AT89S51 mempunyai fitur dasar yang cukup lengkap untuk suatu pemrosesan input-output. Bahasa pemrograman yang digunakan AT89S51 hampir tidak jauh berbeda dengan instruksi set pada mikroprosesor intel yang sudah dipelajari pada perkuliahan. Mikrokontroler adalah system computer yang ringkas, dapat menggantikan fungsi computer dalam pengendalian kerja dan desain yang jauh lebih ringkas daripada computer. Dengan ukurannya yang sangat kecil mikrokontroler dapat digunakan pada peralatan yang bersifat bergerak (mobile) dalam hal ini adalah pada sebuah palang kereta api otomatis. Mikrokontroler ini digunakan sebagai otak dari suatu
embedded system, sebuah system computer terpadu. Mikrokontroler AT89S51 memiliki perbandingan ROM dan RAM nya yang besar, artinya program control disimpan dalam ROM (bisa masked ROM atau Flash PEROM) yang ukurannya relative lebih besar, sedangkan RAM digunakan sebagai tempat penyimpan sementara, hal ini merupakan kelebihan mikrokontroler.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
(0) dan kemudian sinyal ini akan dikirimkan ke mikrokontroler. Sinyal-sinyal yang dikirimkan oleh penguat sinyal inilah yang digunakan untuk mendeteksi keberadaan kereta api yang lewat.
.
1.2 Tujuan Penulisan
Tujuan dilakukan tugas akhir ini adalah sebagai berikut:
1. Salah satu syarat yang harus dipenuhi oleh mahasiswa dalam menyelesaikan pendidikan pada program studi D3 Fisika Instrumentasi FMIPA USU.
2. Menerapkan displin ilmu yang berkaitan yang telah diperoleh selama perkuliahan.
3. Studi awal tentang penggunaan sensor inframerah yang berfungsi sebagai sensor halangan dalam sebuah system otomatisasi.
4. Studi awal tentang system kecerdasan.
5. Studi awal dalam pembuatan palang kereta api otomatis dengan Mikrokonteroler AT89S51 sebagai otak dari seluruh system.
1.3 Batasan Masalah
Penulisan tugas akhir ini dibatasi pada:
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
2. Pemancar yang digunakan adalah inframerah dan penerimanya adalah photodiode.
3. Palang kereta api otomatis ini dilengkapi dengan mikrokontroler AT89S51 yang berfungsi sebagai otok atau pengendali dari seluruh system.
1.4 Metode Pengumpulan Data
Metode pengumpulan data yang dilakukan oleh perancang adalah :
1. Melakukan studi ke perpustakaan mengenai teori-teori yang berkaitan dengan judul tugas akhir ini.
2. Mengumpulkan dan membaca data sheet mengenai komponen yang digunakan.
3. Melakukan perancangan dan perakitan proyek.
4. Melakukan konsultasi dengan dosen pembimbing serta dosen-dosen staff pengajar yang berkaiatan dengan realisasi di bidang masing-masing.
5. Melakukan pengujian alat dan kinerja rangkaian.
1.5 Sistematika Penulisan
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 1 PENDAHULUAN
Bagian ini meliputi latar belakang masalah, tujuan penulisan, batasan masalah, metode pengumpulan data, dan sistematika penulisan.
BAB 2 LANDASAN TEORI
Pada bagian ini akan dijelaskan landasan teori meliputi arsitektur dan konstruksi mikrokontroler AT89S51 (hardware dan software), penerima dan pemancar inframerah, selain itu juga membahas komponen pendukung lainnya yang berhubungan dengan Palang Kereta Api Otomatis.
BAB 3 PERANCANGAN SISTEM
Pada bagian ini akan dijelaskan tentang perancangan alat yang meliputi diagram blok, skematik dari masing-masing rangkaian, diagram alir, serta program yang diisikan ke mikrokontroler AT89S51.
BAB 4 PENGUJIAN RANGKAIAN DAN ANALISA
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 5 KESIMPULAN DAN SARAN
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 2
LANDASAN TEORI
2.1 Perangkat Keras
Pada subbab ini akan dibahas perangkat – perangkat keras yang digunakan pada palang kereta otomatis ini. Perangkat – perangkat keras tersebut antara lain adalah sensor inframerah, fotodioda, motor DC, Buzzer yang berfungsi sebagai alarm, sebuah running text yang berfungsi sebagai tampilan, dan rangkaian mikrokontroler AT89S51.
2.1.1 Asitektur Mikrokontroler AT89S51
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Penggunaan mikrokontroler sangat luas, tidak hanya untuk akuisisi data melainkan juga untuk pengendalian di pabrik-pabrik, kebutuhan peralatan kantor; peralatan rumah tangga, automobil dan sebagainya. Hal ini disebabkan mikrokontroler merupakan system mikroprosesor (yang di dalamnya terdapat CPU (Central Prossesing Unit), ROM (Read Only Memory), RAM (Random Acces Memory), dan I/O) yang telah terpadu dalam satu keping, selain itu komponennya (AT89S51) murah dan mudah didapatkan di pasaran.
Mikrokontroler merupakan sebuah system computer yang seluruh atau sebagian besar elemennya di kemas dalam satu Chip IC. Mikrokontroler dapat dikelompokkan dalam satu keluarga, masing-masing mikrokontroler memiliki spesifikasi tersendiri namun cocok dalam pemogramannya. Contoh-contoh keluarga mikrokontroler adalah keluarga MCS-51, keluarga MC68HC05, keluargaMC68H11, keluarga AVR, keluarga PIC 8, mikrokontroler AT89S51 terdapat dalam keluarga MCS-51, dibandingkan mikrokontroler yang lain seperti AT89C51, AT89C52, dan AT89S52, bahasa-bahasa pemogramannya berbeda-beda, dan memori atau kapasitasnya juga lebih kecil, sedangkan mikrokontroler AT89S51 menggunakan bahasa assembly yang mudah dalam pemogramannya, kapasitasnya juga lebih besar dan menjadi dasar pemilihan mikrokontroler ini karena harganya relative terjangkau.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
mengirimkan data lewat pemancar lalu diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya. System pengukuran jarak jauh ini jelas membutuhkan suatu system akuisisi data sekaligus system pengiriman data secara serial (melalui pemancar), yang semuanya itu bisa diperoleh dari mikrokontroler yang digunakan.
Tidak seperti system computer, yang mampu menangani berbagai macam program aplikasi (misalnya pengolah data, pengolah angka dan lain sebagainya), mikrokontroler hanya bisa digunakan untuk suatu aplikasi tertentu saja. Perbedaan lainnya terletak pada perbandingan RAM-nya dan ROM. Pada system computer perbandingan RAM dan ROM-nya besar, artinya program-program pengguna di simpan dalam ruang RAM yang cukup besar sedangkan rutin-rutin antarmuka perangkat keras di simpan dalam ruang ROM yang kecil. Sedangkan pada mikrokontroler, perbandingan RAM dan ROM-nya yang besar artinya program control di simpan dalam ROM (bisa masked ROM atau Flash PEROM) yang ukurannya relative lebih besar, sedangkan RAM digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
2.1.2 Konstruksi AT89S51
AT89S51 adalah mikrokontroler keluaran Atmel Coorporation dengan 4K byte
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
digunakan untuk menyimpan instruksi berstandar kode MCS-51 sehingga memungkinkan mikrokontroler ini bekerja dalam mode operasi keping tunggal yang tidak memerlukan external memory.
Berikut spesifikasidari AT89S51:
1. kompatibel dengan mikrokontroler MCS-51
2. 8 K Byte in-system programmable (ISP) flash memori dengan kemampuan 1000 kali baca/tulis
3. 128 x 8 bit RAM internal
4. 32 jalur I/O yang dapat deprogram 5. dua buah 16 bit counter/timer 6. enam sumber interupsi
7. saluran Full duplex serial UART
8. mode pemograman ISP yang fleksibel (byte dan page mode)
Penggunaan IC AT89S51 memiliki beberapa keuntungan dan keunggulan, antara lain tingkat kendala yang tinggi, komponen hardware eksternal yang lebih sedikit, kemudahan dalam pemograman, dan hemat dari segi biaya. IC AT89S51 memiliki program internal yang mudah untuk dihapus dan diprogram kembali secara berulang-ulang. Pada pesawat ini IC AT89S51 berfungsi sebagai sentral control dari segala aktivitas pesawat.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
reset ini AT89S51 otomatis di reset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 12 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscillator pembentuk clok yang menetukan kecepatan kerja mikrokontroler. Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler memiliki 2 macam memori yang sifatnya berbeda yaitu:
a. Read Only Memori (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, dalam susunan MCS-51 memori penyimpanan program ini dinamakam sebagai memori program.
b. Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya. Dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini di sebut sebagai memori data.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Jenis memori yang dipakai untuk memori program AT89S51 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89S51 Flash PEROM Programmer.
Sarana Input/Output yang disediakan cukup banyak dan bervariasi. AT89S51 mempunyai 32 jalur Input/Output. Jalur Input/Output parallel dikenal sebagai Port 1 (P1.0…P1.7) dan Port 3 (P3.0…P3.5 dan P3.7).
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
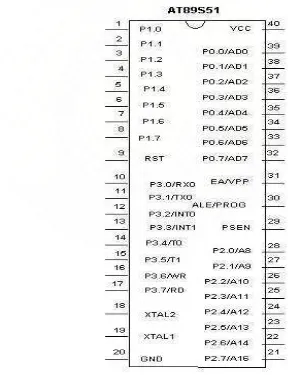
Deskripsi pin-pin pada mikrokontroler AT89S51 : Pin 1 sampai 8
Pin 1 sampai 8 merupakan port 1 yang menjadi saluran (bus) dua arah input/output 8 bit. Dengan internal pull-up yang dapat digunakan untuk berbagai keperluan dan dapat mengendalikan empat iuput TTL. Port ini juga digunakan sebagai saluran alamat pada saat pemograman dan verifikasi.
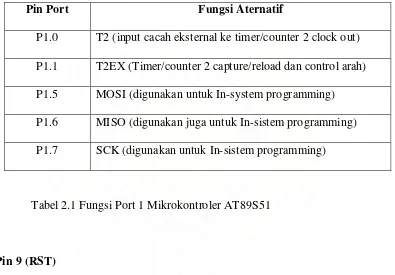
Pin Port Fungsi Aternatif
P1.0 T2 (input cacah eksternal ke timer/counter 2 clock out) P1.1 T2EX (Timer/counter 2 capture/reload dan control arah) P1.5 MOSI (digunakan untuk In-system programming) P1.6 MISO (digunakan juga untuk In-sistem programming) P1.7 SCK (digunakan untuk In-sistem programming)
Tabel 2.1 Fungsi Port 1 Mikrokontroler AT89S51
Pin 9 (RST)
Merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke tinggi akan mereset mikrokontroler ini.
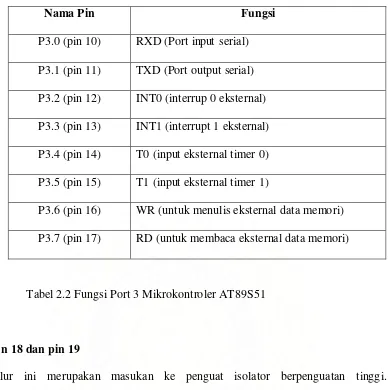
Pin 10 sampai pin 17 (Port 3)
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Nama Pin Fungsi
P3.0 (pin 10) RXD (Port input serial) P3.1 (pin 11) TXD (Port output serial) P3.2 (pin 12) INT0 (interrup 0 eksternal) P3.3 (pin 13) INT1 (interrupt 1 eksternal) P3.4 (pin 14) T0 (input eksternal timer 0) P3.5 (pin 15) T1 (input eksternal timer 1)
P3.6 (pin 16) WR (untuk menulis eksternal data memori) P3.7 (pin 17) RD (untuk membaca eksternal data memori)
Tabel 2.2 Fungsi Port 3 Mikrokontroler AT89S51
Pin 18 dan pin 19
Jalur ini merupakan masukan ke penguat isolator berpenguatan tinggi. Mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan pada chip, kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Oleh karena itu pin 18 dan 19 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu EXTAL 1 juga dapat digunakan sebagai input untuk inverting isolator amplifier dan input ke rangkaian internal clok sedangkan EXTAL 2 merupakan output dari inverting osilator amplifier.
Pin 20 (GND)
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Pin 21 sampai pin 28 (port 2)
Port 2 ini berfungsi sebagai Input/Output biasa atau high order address, pada saat mengakses memori 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengisi dari P2 special function register. Port ini mempunyai internal pull-up dan berfungsi sebagai input dengan memberikan logika 1. sebagai output, port ini dapat memberikan output sink ke empat buah input TTL.
Pin 29 (PSEN)
Program Store Enable (PSEN) merupakan sinyal pengontrol untuk mengakses program memori eksternal yang masuk ke dalam saluran (bus) selama proses pemberian atau pengambilan instruksi (fetching).
Pin 30 (ALE/PROG)
Address Latch Enable (ALE/PROG) merupakan penahan alamat memori eksternal (pada port 1) selama mengakses ke memori eksternal. Pin ini juga berfungsi sebagai pulsa (sinyal) input program (PROG) selama proses pemograman.
Pin 31 EA
Pada kondisi low pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan program yang ada pada memori eksternal setelah system direset. Jika kondisi high pin ini akan berfungsi untuk menjalankan program yang ada pada memori internal. Pada saat flash programming pin ini akan mendapat tegangan 12 Volt.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data atau pun penerima kode byte pada saat flash programming. Pada fungsi I/O biasa port ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut. Pada fungsi sebagai low order multiplex address/data , port ini akan mempunyai internal pull-up. Pada saat flash programming diperlukan ekternal pull-up, terutama pada saat verifikasi program.
Pin 40 (VCC)
Merupakan sumber tegangan positif yang diberikan symbol vcc.
2.1.3. Photodioda
Fotodioda adalah suatu jenis dioda yang resistansinya berubah-ubah jika cahaya yang jatuh pada dioda berubah-ubah intensitasnya. Dalam gelap nilai tahanannya sangat besar hingga praktis tidak ada arus yang mengalir. Semakin kuat cahaya yang jatuh pada dioda maka semakin kecil nilai tahanannya. Foto dioda ini digunakan terutama sebagai saklar elektronik yang bereaksi akibat perubahan intensitas cahaya.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Photodioda dirancang beroperasi pada mode bias-mundur. Arus bocor bias mundur meningkat dengan peningkatan level cahaya. Harga arus umumnya adalah dalan rentang micro-ampere. Photodiode mempunyai waktu respon yang cepat terhadap berbagai cahaya. Cahaya diserap pada daerah penyambungan atau daerah instrinsik menimbulkan pasangan electron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari cahaya.
Mode operasi:
Photodiode dapat dioperasikan dalam 2 animal mode yang berbeda:
1. Mode photovoltaic: seperti solar sell, penyerapan pada photodiode menghasilkan tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil.
2. Mode photokonduktivitas: disini photodiode di aplikasikan sebagai tegangan revers (tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda tidak akan menghantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus photo (hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol)
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Karakteristik bahan photodiode:
1. Silicon (Si) : arus lemah sangat gelap, kecepatan tinggi,sensitivitas bagus antara 400 nm sampai 1000 nm (terbaik antara 800 nm sampai 900 nm). 2. Germanium (Ge) : arus tinggi sangat gelap, kecepatan lambat, sensitivitas
baik antara 600 nm sampai 1800 nm (terbaik 1400 nm sampai1500 nm). 3. Indium Gallium Arsennida (InGaAs) : mahal, arus kecil saat gelap,
kecepatan tinggi sensitivitas baik pada jarak 800 nm sampai 1700 nm (terbaik antara 1300 nm sampai 1600 nm)
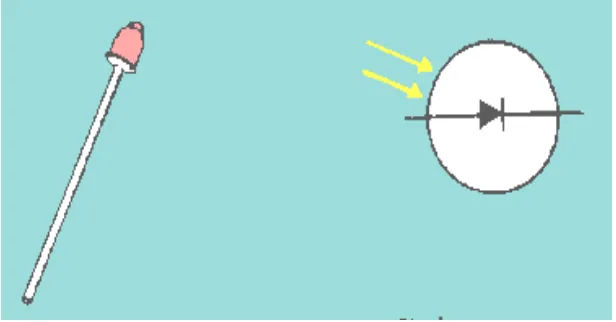
2.1.4 Dioda Pemancar Cahaya Inframerah (LED Inframerah)
Prinsip utama dari rangkaian sensor ini seperti layaknya sebuah saklar yang memberikan perubahan tegangan apabila terdapat penghalang diantara transceiver dan receiver. Sensor ini memiliki dua buah piranti yaitu rangkaian pembangkit/pengirim (Led Inframerah) dan rangkaian penerima (Fotodiode). Rangkaian pembangkit/pengirim memancarkan sinar inframerah kemudian pancarannya diterima oleh penerima (fotodioda) sehingga bersifat menghantar akibatnya tegangan akan jatuh sama dengan tegangan ground (0). Dan sebaliknya apabila tidak mendapat pancaran sinar inframerah maka akan menghasilkan tegangan.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
berkisar antara 1,5V-2V, sedangkan arus majunya berkisar 5mA-20mA. Led inframerah sesuai dengan rancangannya memancarkan cahaya pada spectrum inframerah dengan panjang gelombang = 940 nm. Spectrum cahaya inframerah ini mempunyai level panas yang paling tinggi diantara sinar-sinar yang lain walaupun tidak tampak oleh mata dan mempunyai efek fotolistrik yang terkuat.
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju sambungan p-n terdapat rekombinasi antara electron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah ke dalam bentuk energi cahaya atau photon melainkan dalam bentuk panas sebagian. Untuk dioda yang memancarkan cahaya inframerah (infrared emiting dioda = IRED). Sinar inframerah tidak dapat dilihat manusia , dengan menambahkan obat gallium arsenide dengan berbagai bahan dapat dibuat LED dengan output yang dapat dilihat seperti sinar merah, hijau, kuning, atau biru. Dioda yang memancarkan cahaya (LED) digunakan untuk display alphabet dan digital serta sebagai lampu tanda.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
LED digunakan untuk menghasilkan energi tidak tampak seperti yang dipancarkan oleh pemancar laser atau inframerah.
Gambar 2.3 Simbol dan rangkaian dasar sebuah LED
Pemancar inframerah adalah dioda solid state yang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju. Bila diberi bias maju electron dari daerah-n akan menutup lubang electron yang ada di daerah-p. selama proses rekombinasi ini, energi dipancarkan dari permukaan p dan n dalam bentuk photon. Photon-photon yang dihsilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam bentuk radiasi energi.
2.1.5 Motor DC
Motor DC akan berputar searah/berlawanan arah dengan jarum jam jika salah satu kutubnya diberi tegangan positif dan kutub yang lainnya diberi tegangan negative atau ground. Dan motor DC akan berputar kea rah sebaliknya jika polaritasnya dibalik. Dengan sifat yang demikian maka dibutuhkan suatu rangkaian yang dapat membalikkan polaritas yang diberikan ke motor DC tersebut, sehingga perputaran motor DC dapat dikendalikan oleh rangkaian tersebut. Motor DC jarang digunakan pada aplikasi industri umum karena semua system utilyti listrik
330 VCC
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
dilengkapi dengan perkakas arus bolak-balik, meskipun demikian, pada aplikasi khusus adalah menguntungkan jika mengubah arus bolak-balik menjadi arus searah digunakan dimana control torsi dan kecepatan dengan rentang yang lebar diperlukan untuk memenuhi kebutuhan aplikasi.
Motor DC umum yang menggunakan sikat (brush), yang menggunakan lilitan pada rotor dan menggunakan magnet tetap pada sisi stator, pada dasarnya dapat dianggap sebagai suatu beban yang dapat dihubungkan langsung ke rangkaian switching arus DC. Oleh karena itu, pemilihan ruang tepat cukup diperoleh dengan memperhatikan besar kebutuhan arus untuk memutar motor DC dapat diidentikkan dengan lilitan pada kumparan relay sehingga rangkaian drivernya relative sama. Tujuan motor DC adalah untuk menghsilkan gaya yang menggerakkan (torsi). Pada beberapa kasus sering diperlukan arah putaran motor DC yang berubah-ubah. Prinsip dasar untuk mengubah arah perputarannya adalah dengan membalik polaritas pada catu daya tegangannya.
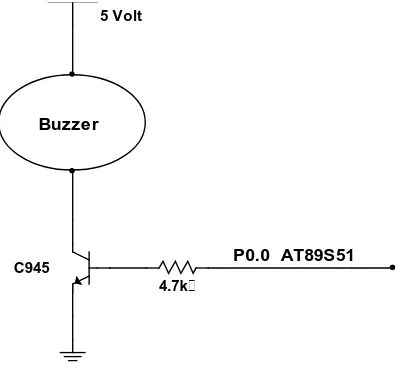
2.1.6 Rangkaian Buzzer
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
C945
4.7k
P0.0 AT89S51
5 Volt
Buzzer
Gambar 2.4 Rangkaian Buzzer
Pada alat ini, alarm yang digunakan adalah buzzer 5 volt. Buzzer ini akan berbunyi jika positifnya dihubungkan ke sumber tegangan positif dan negatifnya dihubungkan ke ground. Pada rangkaian di atas transistor berfungsi sebagai saklar elektronik yang dapat menghidupkan dan mematikan buzzer. Dari gambar dapat dilihat bahwa negatif buzzer dihubungkan ke kolektor dari transistor NPN (2SC945), ini berarti jika transistor dalam keadaan aktif maka kolektor akan terhubung ke emitor dimana emitor langsung terhubung ke ground yang menyebabkan tegangan di kolektor menjadi 0 volt, keadaan ini akan mengakibatkan buzzer berbunyi. Sebaliknya jika transistor tidak aktif, maka kolektor tidak terhubung ke emitor, sehingga tegangan pada kolektor menjadi 5 volt, keadaan ini menyebabkan buzzer mati.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
2.1.7 Running Text
Running text merupakan rangkaian yang dikendalikan oleh mikrokontroler AT89S51 dan terdiri dari beberapa buah LED dan IC 4094. Rangkaian ini akan memberikan informasi berupa teks berjalan kepada pengemudi. Running teks disini dibuat seminimum mungkin karena mengingat proyek yang dibuat oleh penulis hanya sebatas simulasi.
2.2 Perangkat Lunak
2.2.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah bahasa assembly untuk MCS-51. Angka 51 merupakan jumlah instruksi pada bahasa ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10 instruksi. Instruksi-instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu pengisian nilai dapat secara langsung atau tidak langsung.
Contih pengisian nilai secara langsung :
MOV R0,20h
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
MOV 20h,#80h
...
...
MOV R0,20h
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20 Heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol.
Contoh:
MOV R0,#80h
Loop: ...
...
DJNZ R0,Loop
...
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh :
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
ACALL TUNDA
...
TUNDA:
...
4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan.
Contoh:
ACALL TUNDA
...
TUNDA:
...
RET
5. Instruksi JMP (JUMP)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh:
Loop:
...
...
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu jika pin yang dimaksud berlogika high (1).
Contoh:
Loop:
JB P1.0,Loop
...
7. Instruksi JNB (Jump if not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika low (0).
Contoh:
Loop:
JNB P1.0,Loop
...
8. Instruksi CJNZ (Compare Jump if Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu
register dengan suatu nilai tertentu.
Contoh:
Loop:
...
CJNE R0,#20h,Loop
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h, maka program akan melanjutkan instruksi selanjutnya..
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
...
DEC R0 R0 = R0 – 1
...
10. Instruksi INC (Increament)
Instrusi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h
...
INC R0 R0 = R0 + 1
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
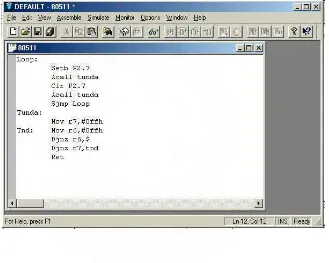
2.2.2 Softe 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa Assembly tersebut dituliskan pada sebuah editor, yaitu 8051 editor, assembler, simulator (IDE). Tampilannya adalah sebagai berikut:
Gambar 2.5 8051 Editor, Assembler, Simulator IDE
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
8051IDE ini berfungsi untuk merubah program yang kita tuliskan ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an. Bilangan heksadesimal inlah yang akan dikirimkam ke mikrokontroler.
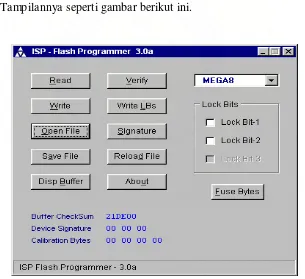
2.2.3 Software Downloder
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroler digunakan software ISP-Flash Programmer 3.0a yang dapat didownload dari internet. Tampilannya seperti gambar berikut ini.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 3
PERANCANGAN SISTEM
3.1 Perancangan Alat
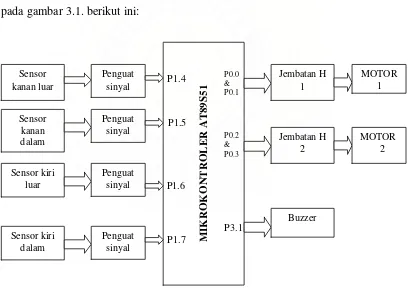
3.1.1 Diagram Blok
Secara garis besar, diagram blok dari rangkaian palang otomatis ini ditunjukkan pada gambar 3.1. berikut ini:
Gambar 3.1. Diagram Blok Rangkaian Keterangan dari diagram blok:
Palang kereta api otomatis ini dirancang hanya sebatas simulasi. Pada palang ini terdapat 14 blok rangkaian utama yang mempunyai fungsi
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
masing. Terdapat 4 buah sensor yaitu: sensor kanan luar berfungsi untuk mendeteksi kereta api yang datang dari sebelah kanan, sensor kanan dalam berfungsi untuk memberitahukan kepada mikrokontroler bahwa seluruh badan kereta api yang dating dari sebelah kanan sudah seluruhnya melewati palang, sensor kiri luar berfungsi untuk mendeteksi kereta api yang datang dari sebelah kiri, dan sensor kiri dalam berfungsi untuk memberitahukan kepada mikrokontroler bahwa seluruh badan kereta api yang dating dari sebelah kiri sudah seluruhnya melewati palang. Pada palang kereta api otomatis ini sensor yang digunakan adalah sensor inframerah. Sensor ini terletak tidak jauh dari palang dan menghadap rel sehingga dapat mendeteksi adanya kereta api yang lewat. Sensor ini terhubung pada P1.4, P1.5, P1.6, dan P1.7 dari mikrokontroler AT89S51 sehingga dapat bekerja sesuai dengan yang telah terprogram.
Output dari sensor akan dikuatkan kembali oleh penguat sinyal sebelum masuk ke mikrokontroller. Hasil penguatan sensor yang telah diolah oleh penguat sinyal inilah yang akan di kirimkan oleh mikrokontroller.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
memberitahukan bahwa kereta api sedang lewat dan dihubungkan ke pin P3.1 pada mikrokontroler AT89S51 sehingga akan bekerja sesuai dengan yang telah terprogram.
3.1.2 Perancangan Sensor Inframerah
3.1.2.1 Perancangan Pemancar Inframerah
Untuk dapat mendeteksi adanya kereta api yang akan lewat, maka palang otomatis ini dilengkapi dengan 4 buah sensor inframerah. Semua sensor ini mempunyai rangkaian yang sama, hanya penempatannya saja yang berbeda.
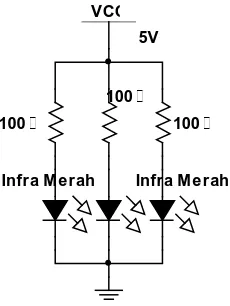
Masing-masing sensor menggunakan 3 buah pemancar inframerah dan sebuah potodioda. Sensor ini memanfaatkan pantulan dari pemancar inframerah yang diterima oleh potodioda. Digunakan 3 buah pemancar inframerah pada masing-masing sensor bertujuan agar sinyal pantulan semakin kuat, sehingga kereta api dapat terdeteksi dengan baik.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
VCC
5V
Infra Merah
100 100
Infra Merah 100
Gambar 3.2 Rangkaian Pemancar inframerah
Pada rangkaian di atas digunakan 3 buah LED inframerah yang diparalelkan, dengan demikian maka intensitas yang dipancarkan oleh inframerah semakin kuat, karena merupakan gabungan dari buah LED inframerah. Resistor yang digunakan adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED inframerah adalah sebesar:
5
0, 05 50
100 V
i A atau mA
R
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
3.1.2.2 Perancangan Penerima Inframerah
Pantulan dari sinar inframerah akan diterima oleh potodioda, kemudian akan diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika potodioda menerima pantulan sinar inframerah maka output dari rangkaian penerima ini akan mengeluarkan logika low (0), namun jika potodioda tidak menerima pantulan sinar inframerah, maka output dari rangkaian penerima akan mengeluarkan logika high (1).
Rangkaian penerima inframerah seperti gambar di bawah ini:
Gambar 3.3 Rangkaian Penerima sinar inframerah
Potodioda memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar inframerah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar inframerah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Pada rangkaian di atas, output dari potodioda diumpankan ke basis dari transistor tipa NPN C828, ini berarti untuk membuat transistor tersebut aktif maka tegangan yang keluar dari potodioda harus lebih besar dari 0,7 volt. Syarat ini akan terpenuhi jika potodioda mendapatkan sinar inframerah. Analisanya sebagai berikut:
Jika tidak ada sinar inframerah yang mengenai potodioda, maka hambatan pada potodioda 15 Mohm, sehingga:
2 330.000
Vout akan diumpankan ke basis dari transistor C828, karena tegangannya hanya 0,107 Volt maka transistor tidak aktif.
Jika ada sinar inframerah yang mengenai potodioda, maka hambatan pada potodioda 300 Kohm, sehingga:
2 330.000
Vout akan diumpankan ke basis dari transistor C828, karena tegangannya lebih besar dari 0,7 volt yaitu 2,619 Volt maka transistor akan aktif.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
diumpankan ke basis dari transistor ke-2 tipe PNP A733, sehingga transistor ini juga aktif. Seterusnya aktifnya transistor A733 akan menyebabkan colektornya terhubung ke emitor, sehingga colektor mandapat tegangan 5 volt dari Vcc, tegangan ini diumpankan ke basis dari transistor ke-3 tipe NPN C945, sehingga transistor ini juga aktif.
Kolektor dari transistor C945 dihubungkan mikrokontroler AT89S51 sehingga jika transistor ini aktif, maka kolektor akan mendapatkan tegangan 0 volt dari ground. Tegangan 0 volt inilah yang merupakan sinyal low (0) yang diumpankan ke mikrokontroler AT89S51, sehingga mikrokontroler dapat mengetahui bahwa sensor ini mengirimkan sinyal, yang berarti bahwa kreta api akan lewat.
Transistor ke-4 tipe PNP A733 berfungsi untuk menyalakan LED sebagai indikator bahwa sensor ini menerima pantulan sinar inframerah dari pemancar. LED ini akan menyala jika sensor menerima sinar inframerah, dan akan mati jika sensor tidak menerima sinar inframerah.
3.1.3 Rangkaian Mikrokontroler AT89S51
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
yang dikehendaki. Rangkaian mikrokontroler ini ditunjukkan pada gambar berikut ini:
Gambar 3.4 Rangkaian mikrokontroller AT89S51
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena mikrokontroller AT89S51 tidak menggunakan memori eskternal. Pin 18 dan 19
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
dihubungkan ke XTAL 12 MHz dan capasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroller AT89S51 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroller ini. Pin 32 sampai 39 adalah Port 0 yang merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3. Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED. Ini dilakukan hanya untuk menguji apakah rangkaian minimum mikrokontroller AT89S51 sudah bekerja atau belum. Dengan memberikan program sederhana pada mikrokontroller tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap digunakan. Pin 20 merupakan ground dihubungkan dengan ground pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5 volt dari power supplay.
3.1.4 Rangkaian Catu Daya (PSA)
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Vreg
LM7805CT
IN OUT
TIP32C
100ohm
100uF
330ohm 220V 50Hz 0Deg
TS_PQ4_12
2200uF 1uF
1N5392GP 1N5392GP
12 Volt
5 Volt
Rangkaian power supplay ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.5 Rangkaian Power Supply (PSA)
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
3.1.5. Perancangan Driver penggerak Motor DC (Jembatan H)
Untuk dapat bergerak membuka dan menutup, maka alat ini harus dapat mengendalikan palang. Alat ini menggunakan 2 buah motor DC 6 volt untuk menggerakkan palang, dimana 1 motor untuk menggerakkan palang sebelah kanan dan 1 motor lagi untuk menggerakkan palang sebelah kiri.
Motor DC akan berputar searah/berlawanan arah dengan jarum jam jika salah satu kutubnya diberi tegangan positip dan kutub yang lainnya diberi tegangan negatif atau ground. Dan motor DC akan berputar kearah sebaliknya jika polaritasnya dibalik. Dengan sifat yang demikian maka dibutuhkan suatu rangkaian yang dapat membalikkan polaritas yang diberikan ke motor DC tersebut, sehingga perputaran motor DC dapat dikendalikan oleh rangkaian tersebut. Dan jika rangkaian tersebut dihubungkan dengan mikrokontroler AT89S51, maka pergerakan motor dapat dikendalikan oleh program. Rangkaian untuk mengendalikan perputaran motor DC tersebut adalah sebuah rangkaian yang dikenal dengan jembatan H. Jembatan H ini terdiri dari 4 buah transistor, dimana 2 buah transistor bertipe NPN dan 2 buah transistor lagi bertipe PNP. Ke-4 transistor ini dirangkai sedemikian rupa sehingga dengan memberikan sinyal low atau high pada rangkaian maka perputaran motor dapat diatur.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
VCC
maka motor akan berputar ke arah kiri kedua motor sehingga kedua palang akan turun. Rangkaian jembatan H, ditunjukkan pada gambar di bawah ini:
Gambar 3.6 Rangkaian jembatan H
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktif (transistor tipe NPN akan aktif jika tegangan pada basis lebih besar dari 0,7 volt). Karena transistor TIP 122 ini tidak aktif, maka kolektornya tidak terhubung ke emitor, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang mendapatkan tegangan 5 volt dari Vcc, maka kolektor dari TIP 122 juga mendapatkan tegangan yang sama. Hal ini menyebabkan motor sebelah kiri mendapatkan tegangan 5 volt (polaritas positif).
Agar motor dapat berputar ke satu arah maka motor harus mendapatkan tegangan 0 volt (polaritas negatif). Hal ini diperoleh dengan memberikan logika low (0) pada P2.7 mikrokontroler AT89S51.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
kolektornya tidak terhubung ke emitor sehingga kolektor tidak mendapatkan tegangan 5 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini menjadi aktif. Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
3.2 Perancangan Program
Alat ini dirancang untuk membuka dan menutup palang kreta api secara otomatis. Diagram alir dari program yang akan dibuat adalah sebgai berikut:
Gambar.3.7 FlowChart Program
Program diawali dengan pengecekan logika pada sensor kanan luar. Jika sensor ini menerima logika 0 yang berarti kereta api ada yang akan lewat maka mikrokontroler segera mengirimkan logika agar jembatan H memutar kedua motor sehingga menutup kedua palang. Demikian juga jika sensor kanan dalam menerima logika 0 yang berarti seluruh badan kereta api sudah lewat maka
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
mikrokontroler mengirimkan logika agar jembatan H memutar kedua motor sehingga membuka kedua palang.
Demikian halnya jika kereta api datang dari sebelah kiri, yang bekerja adalah sensor kiri luar dan sensor kiri dalam sesuai dengan yang telah terprogram pada mikrokontroler AT89S51.
Program palang kereta api otomatis:
s e n s o r _ k a n a n _ l u a r b i t p 1 . 4 ; s e n s o r k a n a n l u a r b e r a d a p a d a a l a ma t b i t p 1 . 4
s e n s o r _ k a n a n _ d a l a m b i t p 1 . 5 ; s e n s o r k a n a n d a l a m b e r a d a p a d a a l a ma t b i t p 1 . 5
s e n s o r _ k i r i _ l u a r b i t p 1 . 6 ; s e n s o r k i r i l u a r b e r a d a p a d a a l a ma t b i t p 1 . 6
s e n s o r _ k i r i _ d a l a m b i t p 1 . 7 ; s e n s o r k i r i d a l a m b e r a d a p a d a a l a ma t b i t p 1 . 7
l i mi t 1 b u k a b i t p 2 . 1 ; l i mi t 1 b u k a b e r a d a p a d a a l a ma t b i t p 2 . 1
l i mi t 1 t u t u p b i t p 2 . 0 ; l i mi t 1 t u t u p b e r a d a p a d a a l a ma t b i t p 2 . 0
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
l i mi t 2 t u t u p b i t p 2 . 2 ; l i mi t 2 t u t u p b e r a d a p a d a a l a ma t b i t p 2 . 2
h i j a u b i t p 0 . 0 ; h i j a u b e r a d a p a d a b i t p 0 . 0 b i r u b i t p 0 . 1 ; b i r u b e r a d a p a d a b i t p 0 . 1 u n g u b i t p 0 . 2 ; u n g u b e r a d a p a d a b i t p 0 . 2 a b u b i t p 0 . 3 ; a b u b e r a d a p a d a b i t p 0 . 3
u t a ma : ; p r o g r a m u t a ma
a c a l l b u k a ; me ma n g g i l r u t i n b u k a
c e k _ k a n a n : ; p r o g r a m u t a ma
s e t b p 3 . 1 ; a k t i f k a n l o g i k a h i g h ( 1 ) p a d a b i t p 3 . 1
a c a l l s t o p ; me ma n g g i l r u t i n s t o p j b s e n s o r _ k a n a n _ l u a r , c e k _ k i r i ; me l o mp a t k e b i t
p 1 . 4 p a d a l o g i k a h i g h ( 1 )
r u t i n 1 : ; p e r i n t a h u n t u k r u t i n 1 a c a l l t u t u p ; me ma n g g i l r u t i n t u t u p
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
j b s e n s o r _ k a n a n _ d a l a m, l o o p ; me l o mp a t k e b i t p 1 . 5 p a d a l o g i k a h i g h ( 1 )
r u t i n 2 : ; p r i n t a h u n t u k r u t i n 2 a c a l l s t o p ; me ma n g g i l r u t i n s t o p
j n b s e n s o r _ k a n a n _ d a l a m, r u t i n 2 ; me l o mp a t k e b i t p 1 . 5 p a d a l o g i k a l o w ( 0 ) s j mp u t a ma ; me l o mp a t k e b a r i s p e r i n t a h
l a b e l u t a ma
c e k _ k i r i : ; p r o g r a m u t a ma
j b s e n s o r _ k i r i _ l u a r , c e k _ k a n a n ; me l o mp a t k e b i t p 1 . 6 p a d a l o g i k a h i g h ( 1 )
r u t i n 3 : ; p e r i n t a h u n t u k r u t i n 3 a c a l l t u t u p ; me ma n g g i l r u t i n t u t u p
l o o p 1 : ; p e r i n t a h u n t u k l o o p 1 a c a l l s t o p ; me ma n g g i l r u t i n s t o p
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
r u t i n 4 : ; p e r i n t a h u n t u k r u t i n 4 a c a l l s t o p ; me ma n g g i l r u t i n s t o p j n b s e n s o r _ k i r i _ d a l a m, r u t i n 4 ; me l o mp a t k e b i t
p 1 . 7 p a d a l o g i k a l o w ( 0 )
s j mp u t a ma ; me l o mp a t k e b a r i s p e r i n t a h l a b e l u t a ma
b u k a : ; p e r i n t a h b u k a
c l r p 3 . 1 ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 3 . 1
a c a l l b u k a mo t o r 1 ; me ma n g g i l r u t i n b u k a mo t o r 1
c e k mo t o r b u k a 1 : ; p e r i n t a h u n t u k c e k mo t o r b u k a 1
j b l i mi t 1 b u k a , c e k mo t o r b u k a 2 ; me l o mp a t k e b i t p 2 . 1 p a d a l o g i k a h i g h ( 1 )
a c a l l s t o p mo t o r 1 ; me ma n g g i l r u t i n s t o p mo t o r 1
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
j b l i mi t 2 b u k a , b u k a s e r e n t a k ; me l o mp a t k e b i t p 2 . 3 p a d a l o g i k a h i g h ( 1 )
a c a l l s t o p mo t o r 2 ; me ma n g g i l r u t i n s t o p mo t o r 2
a c a l l s t o p ; me ma n g g i l r u t i n s t o p r e t ; p r o g r a m b e r h e n t i u n t u k
p r o g r a m b u k a
b u k a s e r e n t a k : ; p e r i n t a h b u k a s e r e n t a k j b l i mi t 1 b u k a , l a n j u t ; me l o mp a t k e b i t p 2 . 1
p a d a l o g i k a h i g h ( 1 )
a c a l l b u k a mo t o r 2 ; me ma n g g i l r u t i n b u k a mo t o r 2
s j mp c e k mo t o r b u k a 1 ; me l o mp a t k e b a r i s
p e r i n t a h l e b e l c e k mo t o r b u k a 1
l a n j u t : ; p e r i n t a h l a n j u t
a c a l l b u k a s e mu a ; me ma n g g i l r u t i n b u k a s e mu a
s j mp b u k a ; me l o mp a t k e b a r i s p e r i n t a h l e b e l b u k a
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
c l r p 3 . 1 ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 3 . 1
a c a l l t u t u p mo t o r 1 ; me ma n g g i l r u t i n t u t u p mo t o r 1
c e k mo t o r t u t u p 1 : ; p e r i n t a h c e k mo t o r t u t u p 1 j b l i mi t 1 t u t u p , c e k mo t o r t u t u p 2 ; me l o mp a t k e
b i t p 2 . 0 p a d a l o g i k a h i g h ( 1 ) a c a l l s t o p mo t o r 1 ; me ma n g g i l
r u t i n s t o p mo t o r 1
c e k mo t o r t u t u p 2 : ; p e r i n t a h c e k mo t o r t u t u p 2 j b l i mi t 2 t u t u p , t u t u p s e r e n t a k ; me l o mp a t k e
b i t p 2 . 2 p a d a l o g i k a h i g h ( 1 )
a c a l l s t o p mo t o r 2 ; me ma n g g i l r u t i n s t o p mo t o r 2
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m t u t u p
t u t u p s e r e n t a k : ; p e r i n t a h t u t u p s e r e n t a k j b l i mi t 1 t u t u p , l a n j u t k a n ; me l o mp a t k e b i t
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
a c a l l t u t u p mo t o r 2 ; me ma n g g i l r u t i n t u t u p mo t o r 2
s j mp c e k mo t o r t u t u p 1 ; me l o mp a t k e b a r i s p e r i n t a h
c e k mo t o r t u t u p 1
l a n j u t k a n : ; p e r i n t a h l a n j u t k a n
a c a l l t u t u p s e mu a ; me ma n g g i l r u t i n t u t u p s e mu a
s j mp t u t u p ; me l o mp a t k e b a r i s p r i n t a h l e b e l t u t u p
b u k a s e mu a : ; p e r i n t a h b u k a s e mu a
mo v p 0 , # 0 a h ; i s i k a n n i l a i a h e k s a d e s i ma l k e p 0
mo v r 7 , # 2 0 0 ; i s i k a n n i l a i 2 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
d a n a k a n me l o mp a t k e me mo r i p r o g r a m b u k a s e mu a j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
t u t u p s e mu a : ; p e r i n t a h t u t u p s e mu a
mo v p 0 , # 0 5 h ; i s i k a n n i l a i 5 h e k s a d e s i ma l k e p 0
mo v r 7 , # 1 0 0 ; i s i k a n n i l a i 1 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7 d a n a k a n me l o mp a t k e me mo r i p r o g r a m t u t u p s e mu a j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m t u t u p s e mu a
b u k a mo t o r 1 : ; p e r i n t a h b u k a mo t o r 1 mo v p 0 , # 0 2 h ; i s i k a n n i l a i 2 h e k s a d e s i ma l
k e p 0
mo v r 7 , # 2 0 0 ; i s i k a n n i l a i 2 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
p r o g r a m b u k a mo t o r 1 j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m b u k a mo t o r 1
b u k a mo t o r 2 : ; p e r i n t a h b u k a mo t o r 2
mo v p 0 , # 0 8 h ; i s i k a n n i l a i 8 h e k s a d e s i ma l k e p 0
mo v r 7 , # 2 0 0 ; i s i k a n n i l a i 2 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
d a n a k a n me l o mp a t k e me mo r i p r o g r a m b u k a mo t o r 2 j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m b u k a mo t o r 2
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
mo v p 0 , # 0 1 h ; i s i k a n n i l a i 1 h e k s a d e s i ma l k e p 0
mo v r 7 , # 1 0 0 ; i s i k a n n i l a i 1 0 0 h e k s a d e s i ma l k e 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
d a n a k a n me l o mp a t k e me mo r i p r o g r a m t u t u p mo t o r 1 j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
a c a l l s t o p ; me ma n g g i l r u t i n s t o p
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m t u t u p mo t o r 1
t u t u p mo t o r 2 : ; p e r i n t a h t u t u p mo t o r 2
mo v p 0 , # 0 4 h ; i s i k a n n i l a i 4 h e k s a d e s i ma l k e p 0
mo v r 7 , # 1 0 0 ; i s i k a n n i l a i 1 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
d a n a k a n me l o mp a t k e me mo r i p r o g r a m t u t u p mo t o r 2 j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m t u t u p mo t o r 2
s t o p mo t o r 1 : ; p e r i n t a h s t o p mo t o r 1
c l r h i j a u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 0
c l r b i r u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 1
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m s t o p mo t o r 1
s t o p mo t o r 2 : ; p e r i n t a h s t o p mo t o r 2
c l r b i r u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 1
c l r u n g u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 2
r e t ; p r o g r a m b e r h e n t i u n t u k p r o g r a m s t o p mo t o r
s t o p : ; p e r i n t a h
c l r h i j a u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 0
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
c l r u n g u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 2
c l r a b u ; a k t i f k a n l o g i k a l o w ( 0 ) p a d a b i t p 0 . 3
mo v r 7 , # 1 0 0 ; i s i k a n n i l a i 1 0 0 h e k s a d e s i ma l k e r e g i s t e r 7 ( r 7 )
d j n z r 7 , $ ; i n s t r u k s i y a n g a k a n me n g u r a n g i 1 n i l a i r e g i s t e r 7
d a n a k a n me l o mp a t k e me mo r i p r o g r a m s t o p j i k a s e t e l a h p e n g u r a n g a n b e l u m d i h a s i l k a n 0 r e t ; p r o g r a m b e r h e n t i u n t u k
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
BAB 4
PENGUJIAN RANGKAIAN DAN ANALISA
4.1 Pengujian Rangkaian
4.1.1 Pengujian Rangkaian Mikrokontroler AT89S51
Untuk mengetahui rangkaian mikrokontroler ini sudah bekerja dengan baik maka dilakukan pengujian.
Gambar 4.1 Rangkaian minimum mikrokontroler AT89S51
Renova Simanullang : Perancangan Palang Kereta Api Otomatis Berbasis Mikrokontroler AT89S51 Menggunakan Sensor Inframerah Sebagai Sensor Halangan, 2009.
Pengujian ini dilakukan dengan cara memberikan program sederhana pada mikrokontroler AT89S51. Programmya adalah sebagai berikut:
Loop:
Cpl P3.7
Acall Tunda
Sjmp Loop
Tunda:
Mov R7,#255
Tnd:
Mov R6,#255
Djnz r6,$
Djnz r7,Tnd
Ret
Program di atas akan mengubah logika yang ada pada P3.7 selama selang waktu tunda. Jika logika pada P3.7 high maka akan diubah menjadi low, demikian juga sebaliknya jika logika pada P3.7 low maka akan diubah ke high, demikian seterusnya.