TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
JOHANNES PANDIANGAN 042408008
PROGRAM STUDI D3 FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERNYATAAN
PERANCANGAN DAN PENGGUNAAN PHOTODIODA SEBAGAI SENSOR PENGHINDAR DINDING PADA ROBOT FORKLIFT
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 30 Juli 2007
PERSETUJUAN
Judul : PERANCANGAN DAN PENGGUNAAN
PHOTODIODA SEBAGAI SENSOR PENGHINDAR DINDING PADA ROBOT FORKLIFT
Kategori : TUGAS AKHIR
Nama : JOHANNES PANDIANGAN
Nomor Induk Mahasiswa : 042408008
Program Studi : DIPLOMA III FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
(FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, 30 Juli 2007
Diketahui
Departemen Fisika FMIPA USU Pembimbing, Ketua,
Dr. Marhaposan Situmorang Ahmad Hidayat S.T
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan Maha Penyayang, dengan limpah kasih karunia-Nya tugas akhir ini berhasil diselesaikan dalam waktu yang telah ditetapkan.
ABSTRAK
DAFTAR ISI
1.3Identifikasi Masalah 2
1.4Batasan Masalah 3
1.5Sistematika Penulisan 3
Bab 2 Landasan Teori
2.1 Diagram Blok Rangkaian Robot Forklift 5
2.2 Arsitektur Mikrokontroler AT89S52 7
2.3 Konstruksi AT89S52 9
2.4 Perangkat Lunak 14
2.7 Dioda Pemancar Cahaya Inframerah (LED Inframerah) 27
2.8 Transistor 30
2.9 Osilator Kristal 34
Bab 3 Perancangan Alat dan Program 36
3.1 Spesifikasi Alat (Robot) 36
3.2 Diagram Blok 36
3.3 Fungsi Tiap Blok 37
3.4 Rangkaian Catu Daya (PSA) 39
3.5 Rangkaian Mikrokontroler AT89S52 40
3.6 Perancangan Sensor Dinding dan Pengolah Data Sensor 41 3.7 Perancangan Driver Penggerak Motor DC (Jembatan H) 45
Bab 4 Pengujian Rangkaian dan Analisa 54
4.1 Pengujian Rangkaian Catu Daya 54
4.2 Pengujian Rangkaian Mikrokontroler AT89S52 55
4.3 Pengujian Rangkaian Sensor Dinding 56
4.4 Pengujian Pengendali Pergerakan Motor (Motor Driver) 57
DAFTAR GAMBAR
Halaman
Gambar 2.1 Diagram Blok Rangkaian Robot Forklift 5
Gambar 2.2 IC Mikrokontroler AT89S52 13
Gambar 2.3 8051 Editor, Assembler, Simulator (IDE) 19
Gambar 2.4 ISP-Flash Programmer 3.a 20
Gambar 2.5 Simbol Rangkaian Penguat Operasional 21
Gambar 2.6 Penguat Pembalik (Inverting Amplifier) 23
Gambar 2.7 Konfigurasi Pin LM 358 24
Gambar 2.8 Gambar Photodioda dan Simbolnya 27
Gambar 2.9 Simbol dan Rangkaian Dasar Sebuah LED 28
Gambar 2.10 Simbol Transistor PNP 30
Gambar 2.11 Simbol Transistor NPN 30
Gambar 2.12 Transistor Sebagai Saklar 31
Gambar 2.13 Karakteristik Transistor Aktif 32
Gambar 2.14 Karakteristik Transistor Sebagai Saklar 33 Gambar 2.15 Lambang dan Rangkaian Ekivalen Osilator Kristal 35
Gambar 3.1 Diagram Blok Rangkaian 37
Gambar 3.2 Rangkaian Catu Daya 39
Gambar 3.3 Rangkaian Mikrokontroler AT89S52 40
Gambar 3.4 Rangkaian Pemancar Inframerah 42
Gambar 3.5 Rangkaian Penerima Sinyal Photodioda 43
Gambar 3.6 Rangkaian Jembatan H 46
Gambar 3.7 Diagram Alir Program 49
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Kaki-Kaki Pin Pada Port 3 11
Tabel 4.1 Hasil Pengukuran Rangkaian Catu Daya 54
Tabel 4.2 Hasil Pengujian Pada Port 2.7 Mikrokontroler 56
Tabel 4.3 Pengujian Sensor Dinding 57
PENDAHULUAN
1.1 Latar Belakang
Pada kehidupan sehari-hari manusia membutuhkan bantuan dari sesuatu yang dapat bekerja secara cepat, teliti dan dapat bekerja secara terus-menerus tanpa mengenal lelah, robot adalah jawaban dari keinginan tersebut. Robot ini diharapkan dapat menggantikan pekerjaan manusia pada lingkungan yang berbahaya bagi kesehatan maupun keselamatan manusia tersebut dan dapat mengamati lingkungan lebih dari kemampuan panca indra manusia.
Pada proyek ini dibangun sebuah AMR (Autonomous Mobile Robot) yang dapat mengangkat barang dan berusaha untuk memindahkan barang tersebut ke tempat yang sudah ditentukan. Robot ini memanfaatkan cahaya inframerah yang dipantulkan oleh barang juga dinding sebagai sistem navigasinya (pedomannya). Robot akan menangkap cahaya inframerah yang dipantulkan oleh barang dan dinding tersebut menggunakan photodioda dengan mikrokontroler sebagai pusat kontrolnya.
Mikrokontroler adalah sistem komputer yang ringkas, sebab dapat menggantikan fungsi komputer dalam pengendalian kerja dan disain yang jauh lebih ringkas dari pada komputer. Dengan ukurannya yang kecil, mikrokontroler dapat digunakan pada peralatan yang bersifat bergerak (mobile), seperti kendaraan dan peralatan jinjing (portable), atau pada robot.
untuk suatu pemrosesan input-output. Bahasa pemrograman yang digunakan AT89S52 hampir tidak berbeda jauh dengan instruksi set pada mikroprosesor Intel yang sudah dipelajari pada perkuliahan, sehingga dalam penggunaannya tidaklah begitu sulit.
1.2 Tujuan Proyek
Yang menjadi tujuan penulisan Tugas Akhir ini adalah:
1. Memanfaatkan mikrokontroler AT89S52 sebagai tempat pemrosesan data (otak) dari sebuah sistem (robot).
2. Sebagai langkah awal untuk membuat sebuah sistem otomatisasi dalam dunia industri sehingga meningkatkan efisiensi kerja.
3. Membuat sebuah sistem elektronik yang dapat membantu manusia untuk memindahkan barang ke tempat tertentu secara otomatis.
4. Memanfaatkan inframerah dan photodioda sebagai sensor pada robot
1.3 Identifikasi Masalah
1.4Batasan Masalah
Pemancar yang digunakan pada sensor dinding adalah IRED (Infrared Emitting Diodes) dan penerimanya adalah photodioda, sehingga dinding hanya dapat terdeteksi dari jarak yang dekat (maksimal 30cm).
Robot hanya bisa mendeteksi dinding yang berada di depan, depan samping kiri dan depan samping kanan, tidak dapat mendeteksi keberadaan dinding dibagian belakang.
Robot hanya mengetahui keberadaan benda (benda yang sudah ditentukan) di depannya, tetapi tidak mengetahui berapa jarak benda dari tempat robot berada.
1.5Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat
sistematika penulisan Tugas Akhir ini sebagai berikut:
BAB I PENDAHULUAN
Meliputi latar belakang masalah, maksud dan tujuan penulisan, identifikasi masalah, batasan masalah, metode penulisan dan sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian, yang meliputi arsitektur dan konstruksi mikrokontroler yang digunakan. Selain itu juga membahas tentang jenis sensor yang digunakan.
BAB III PERANCANGAN ALAT DAN PROGRAM
BAB IV PENGUJIAN DAN ANALISA RANGKAIAN
Meliputi uraian tentang cara pengujian rangkaian.
BAB V KESIMPULAN DAN SARAN
Mengenai kesimpulan yang didapat setelah merakit proyek ini dan saran yang diberikan demi kesempurnaan dan pengembangan proyek ini pada masa yang akan datang kearah yang lebih baik.
DAFTAR PUSTAKA
LANDASAN TEORI
2.1 Diagram Blok Rangkaian Robot Forklift
Gambar 2.1 merupakan diagram blok keseluruhan dari robot forklift. Pada robot ini terdapat 5 buah sensor dinding, dimana sensor dinding yang berada di bagian paling depan robot dihubungkan ke P2.3 dari mikrokontroler AT89S52, sensor dinding yang berada di depan kiri dihubungkan ke P2.5 dari mikrokontroler AT89S52, sensor dinding yang berada di depan kanan dihubungkan ke P2.6 dari mikrokontroler AT89S52, sedangkan sensor dinding belakang kiri dihubungkan ke P3.4 dari mikrokontroler AT89S52,dan sensor belakang kanan dihubungkan ke P3.3 dari mikrokontroler AT89S52.
Adapun sensor barang kanan dihubungkan ke P1.6 dari mikrokontroler AT89S52, sensor barang kiri dihubungkan ke P1.5 dari mikrokontroler AT89S52, dan sensor barang bawah dihubungkan ke P1.7 dari mikrokontroler AT89S52.
Sedangkan komponen lain yang dihubungkan ke mikrokontroler sebagai input antara lain seperti:
1. Sensor garis dihubungkan ke P3.5 dari mikrokontroler AT89S52
2. Limit switch bagian atas dihubungkan ke P3.7 dari mikrokontroler AT89S52 3. Limit switch bagian atas dihubungkan ke P3.6 dari mikrokontroler AT89S52
Untuk mengendalikan pergerakan motor yang berfungsi sebagai penggerak roda dari robot, digunakan sebuah rangkaian driver penggerak motor DC yaitu jembatan H. Jembatan H ini akan memutar motor DC searah atau berlawanan arah jarum jam bila diberi pulsa 1 atau 0. Dengan demikian pergerakan motor dapat dikendalikan melalui program. Pin – pin jembatan H ini dihubungkan ke P0.4, P0.5, P0.6, dan P0.7 dari mikrokontroler AT89S52. Teori yang akan dibahas disini meliputi perangkat keras dan lunak yang mengarah kepada sensor penghindar tabrakan.
2.2. Arsitektur Mikrokontroler AT89S52
Mikrokontroler saat ini sudah dikenal dan digunakan secara luas pada dunia industri. Banyak sekali penelitian atau tugas akhir mahasiswa yang menggunakan berbagai versi mikrokontroler yang dapat dibeli dengan murah. Hal ini dikarenakan produksi massal yang dilakukan oleh para produsen chip seperti Atmel, Maxim, dan Microchip. Mikrokontroler saat ini merupakan chip utama pada hampir setiap peralatan elektronika canggih. Robot-robot canggih pun sangat bergantung pada kemapuan mikrokontroler dan kemapuan pembuat program mikrokontroler tersebut.
industri MCS-51 baik pin kaki IC maupun set intruksinya serta harganya yang cukup murah. Oleh kaena itu, sangatlah tepat jika digunakan untuk berbagai keperluan.
Kita dapat menjumpai bermacam aplikasi dari mikrokontroler, seperti dalam bidang pengukuran jarak jauh atau yang dikenal dengan sistem telemetri. Misalnya pengukuran disuatu tempat yang membahayakan manusia, maka akan lebih nyaman jika dipasang suatu sistem pengukuran yang bisa mengirimkan data lewat pemancar dan diterima oleh stasiun pengamatan dari jarak yang cukup aman dari sumbernya. Sistem pengukuran jarak jauh ini jelas membutuhkan suatu sistem akuisisi data sekaligus sistem pengiriman data secara serial (melalui pemancar), yang semuanya itu bisa diperoleh dari mikrokontroler yang digunakan.
2.3 Konstruksi AT89S52
Mikrokontroler AT89S52 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1 kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini AT89S52 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan frekuensi maksimum 12 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi rangkaian oscilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler. Mikrokontroler memiliki dua macam memori yang sifatnya berbeda.
Read Only Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dangan keperluannya, dalam susunan MCS-51 memori penyimpanan progam ini dinamakan sebagai memori progam.
Random Access Memori (RAM) isinya akan sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat progam bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Jenis memori yang dipakai untuk Memori Program AT89S52 adalah Flash PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai AT89S52 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S52 sebesar 128 byte. Meskipun hanya kecil saja, tapi untuk banyak keperluan memori kapasitas itu sudah cukup.
Sarana Input/Ouput yang disediakan cukup banyak dan bervariasi. AT89S52 mempunyai 32 jalur Input/Output. Jalur Input/Output paralel dikenal sebagai Port 0 (P0.0..P0.7), Port 1 (P1.0..P1.7), Port 2 (P2.0..P2.7) dan Port 3 (P3.0.. P3.7).
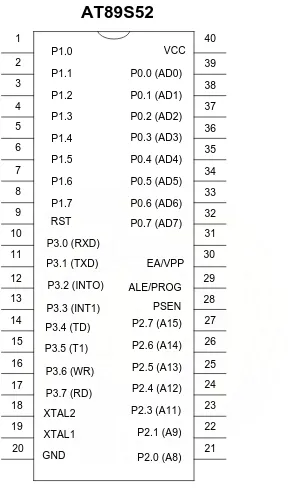
Deskripsi pin-pin pada mikrokontroler AT89S52 :
VCC (Pin 40)
Suplai tegangan.
GND (Pin 20)
Ground.
Port 0 (Pin 39-Pin 32)
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data ataupun penerima kode byte pada saat flash progamming Pada fungsi sebagai I/O biasa port ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah sebagai input dengan memberikan logika 1 pada port tersebut.
Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengaksememori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan isi dari P2 special function register. Port ini mempunyai internal pull up dan berfungsi sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat memberikan output sink keempat buah input TTL.
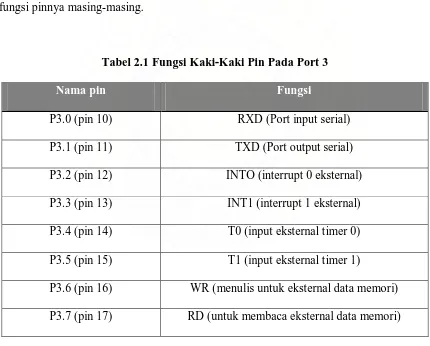
Port 3 (Pin 10 – pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pullup. Port 3 juga mempunyai fungsi pinnya masing-masing.
Tabel 2.1 Fungsi Kaki-Kaki Pin Pada Port 3
Nama pin Fungsi
P3.0 (pin 10) RXD (Port input serial)
P3.1 (pin 11) TXD (Port output serial)
P3.2 (pin 12) INTO (interrupt 0 eksternal) P3.3 (pin 13) INT1 (interrupt 1 eksternal) P3.4 (pin 14) T0 (input eksternal timer 0) P3.5 (pin 15) T1 (input eksternal timer 1)
RST (pin 9)
Reset akan aktif dengan memberikan input high selama 2 cycle.
ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat selama mengakses memori eksternal. Selain itu, sebagai pulsa input progam (PROG) selama memprogam Flash.
PSEN (pin 29)
Progam store enable digunakan untuk mengakses memori progam eksternal.
EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan menjalankan progam yang ada pada memori eksternal setelah sistem direset. Jika kondisi high, pin ini akan berfungsi untuk menjalankan progam yang ada pada memori internal. Dengan kata lain bila pin ini diberi logika tinggi (H), mikrokontroler akan melaksanakan instruksi dari ROM / EPROM ketika isi program counter kurang dari 4096. Bila diberi logika rendah (L) maka mikrokontroler akan melaksanakan seluruh instruksi dari memori program luar. Pada saat flash progamming, pin ini akan mendapat tegangan 12 Volt.
XTAL1 (pin 19)
Input untuk clock internal. Pin masukan ke rangkaian osilator internal. Sebuah osilator kristal atau sumber osilator luar dapat digunakan.
XTAL2 (pin 18)
1
Gambar 2.2 IC Mikrokontroler AT89S52
Spesifikasi penting AT89S52 antara lain:
8 Kbyte In-system Programmable (ISP) flash memori dengan kemampuan 1000 kali baca/tulis.
Tegangan kerja 4 – 5 V.
Bekerja dengan rentang 0 – 33 MHz.
256x8 bit RAM internal.
32 jalur I/O yang dapat deprogram.
Tiga buah 16 bit Timer/Counter.
Delapan sumber interrupt.
Saluran Full-Duplex serial UART.
Watchdog timer.
Dual data pointer.
Mode pemograman ISP yang fleksibel (Byte dan Page Mode).
2.4 Perangkat Lunak
2.4.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89C52 adalah bahasa assembly untuk MCS-51. Angka 51 merupakan jumlah instruksi pada bahasa ini. Dari 52 instruksi, yang sering digunakan orang hanya 10 instruksi. Instruksi –instruksi tersebut antara lain :
1. Instruksi MOV
MOV R0,#20h
Perintah di atas berarti: isikan nilai 20 Heksadesimal ke register 0 (R0). Tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah nilai. Contoh pengisian nilai secara tidak langsung:
MOV 20h,#80h ...
... MOV R0,20h
Perintah di atas berarti: isikan nilai yang terdapat pada alamat 20 Heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh:
MOV R0,#80h Loop: ...
...
DJNZ R0,Loop ...
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh:
...
ACALL TUNDA ...
TUNDA:
... 4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan.
Contoh:
ACALL TUNDA ... TUNDA:
... RET
5. Instruksi JMP (Jump)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh:
Loop:
JMP Loop
6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1). Contoh:
Loop:
JB P1.0,Loop ...
7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0).
Contoh: Loop:
JNB P1.0,Loop ...
8. Instruksi CJNZ (Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu.
Contoh: Loop:
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya..
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h ...
DEC R0 R0 = R0 – 1 ...
10.Instruksi INC (Increament)
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1.
Contoh:
MOV R0,#20h R0 = 20h ...
INC R0 R0 = R0 + 1 ...
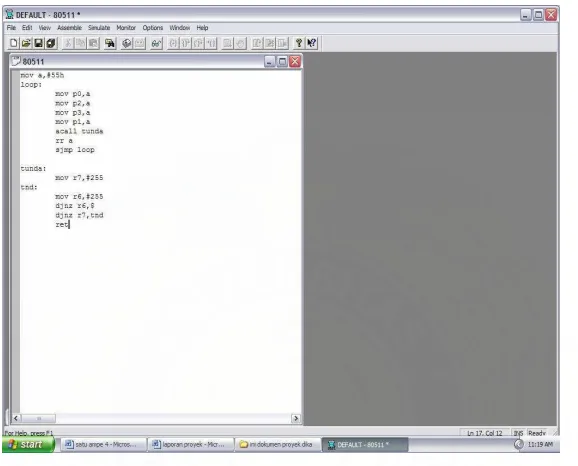
2.4.2 Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti di bawah ini.
Gambar 2.3 8051 Editor, Assembler, Simulator (IDE)
Setelah program selesai ditulis, kemudian di-save dan kemudian di-Assemble (di-compile). Pada saat di-assemble akan tampil pesan peringatan dan kesalahan. Jika masih ada kesalahan atau peringatan, itu berarti ada kesalahan dalam penulisan perintah atau ada nama subrutin yang sama, sehingga harus diperbaiki terlebih dahulu sampai tidak ada pesan kesalahan lagi.
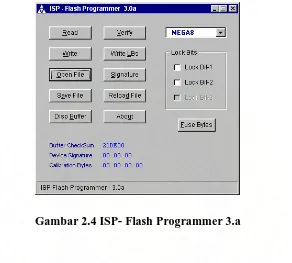
2.4.3 Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroler digunakan software ISP- Flash Programmer 3.0a yang dapat didownload dari internet. Tampilannya seperti gambar di bawah ini
Gambar 2.4 ISP- Flash Programmer 3.a
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil file
heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk mengisikan hasil kompilasi tersebut ke mikrokontroler.
2.5 IC OP-AMP LM 358
penguat oprasional ini adalah karakteristiknya yang mendekati ideal sehingga dalam merancang rangkaian yang menggunakan penguat ini lebih mudah dan juga karena penguat ini bekerja pada tingkatan yang cukup dekat dengan karakteristik kerjanya yang teoritis.
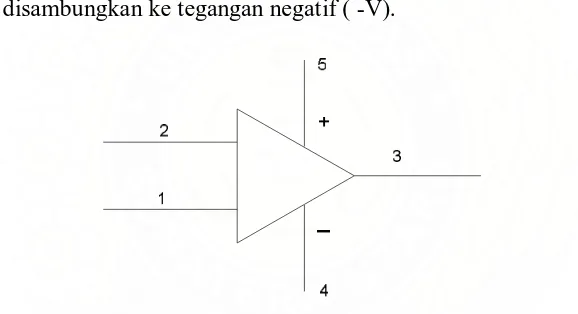
Dari sudut sinyal sebuah operasional mempunyai tiga terminal, yaitu dua terminal masukan dan satu terminal keluaran. Gambar 2.5 menunjukkan simbol dari sebuah penguat operasional. Terminal 1 dan 2 adalah terminal masukan dan terminal 3 adalah terminal keluaran. Kebanyakan penguat operasional membutuhkan catu daya DC dengan dua polaritas untuk dapat beroperasi. Terminal 4 disambungkan ke tegangan positif ( +V) dan terminal 5 disambungkan ke tegangan negatif ( -V).
Gambar 2.5 Simbol rangkaian Penguat Operasional
Karakteristik utama sebuah penguat operasional yang ideal adalah: 1. Impedansi masukan yang tak terhingga
Penguat yang ideal diharapkan tidak menarik arus masukan, artinya tidak ada arus yang masuk ke terminal 1 maupun 2 ( I1 = I2 = 0 ).
Terminal 3 merupakan keluaran penguat opersional, idealnya diharapkan bertindak sebagai terminal keluaran sebuah sumber-sumber tegangan ideal. Tegangan antara terminal 3 dengan ground akan selalu sama dengan A (V2 – V1) dimana A adalah faktor penguatan sebuah penguat operasional.
3. Penguatan loop terbuka tak terhingga
Apabila dioperasikan pada loop terbuka (tidak ada umpan balik dari keluaran ke masukan), maka sebuah penguat operasional ideal mempunyai gain (penguatan) yang besarnya tak terhingga.
Pada op-amp terdapat satu terminal keluaran, dan dua terminal masukan. Terminal masukan yang diberi tanda (-) dinamakan terminal masukan pembalik (inverting), sedangkan terminal masukan yang diberi (+) dinamakan terminal masukan bukan pembalik (non inverting).
Penguat Pembalik (Inverting Amplifier)
Gbr 2.6 Penguat Pembalik (Inverting Amplifier)
Arus yang melintasi R1 ( I1 ) terbagi dua yaitu arus yang melintasi Rf ( I2 ) dan arus yang masuk ke op-amp sehingga dapat ditulis:
I1 = I2 + I3 ...(1) (V1–Vs)/R1 = (Vs-Vo)/Rf + Vs/Rin...(2) Dengan mengasumsikan bahwa op-amp adalah ideal (dimana Zin = A = tak terhingga), maka:
Vs = Vo/A = 0
Karena Vs = 0 sehingga persamaan (2) menjadi:
Vi/R1 = - Vo/Rf ...(3) Vo/Vi = - Rf /R1 ...(4)
Vo = - (Rf/R1).Vi ...(5)
IC ini memiliki spesifikasi sebagai berikut:
Frekuensi internal yang dapat diubah untuk penguatannya.
Penguatan tegangan yang besar (100 dB).
Memiliki besar range tegangan antara 3V – 32V .
Arus bias input rendah (20 nA).
Arus offset input rendah (2 nA).
Tegangan offset input rendah (2 mV).
Tegangan output besar, berkisar 0 sampai (Vcc – 1,5V)
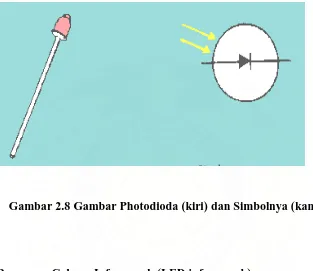
2.6 Photodioda
Photodioda merupakan piranti semikonduktor dengan struktur sambungan p-n yang dirancang untuk beroperasi bila dibiaskan dalam keadaan terbalik, untuk mendeteksi cahaya.
Ketika energi cahaya dengan panjang gelombang yang benar jatuh pada sambungan photodioda, arus mengalir dalam sirkuit eksternal. Komponen ini kemudian akan bekerja sebagai generator arus, yang arusnya sebanding dengan intensitas cahaya itu. Cahaya diserap di daerah penyambungan atau daerah intrinsik menimbulkan pasangan elektron-hole yang mengalami perubahan karakteristik elektris ketika energi cahaya melepaskan pembawa muatan dalam bahan itu, sehingga menyebabkan berubahnya konduktivitas. Hal inilah yang menyebabkan photodioda dapat menghasilkan tegangan/arus listrik jika terkena cahaya. Hal ini dapat ditunjukkan dengan rumus di
Dimana Eg = Energi foton
h = Potensial ionisasi (4,136.10-15 eV)
c = Kecepatan cahaya (3.108 m/s) Panjang Gelombang Cahaya (m)
mundur sebagai hasil dari sebuah penambahan pada cahaya. Reponsivitas dari photodioda merupakan perbandingan dalam mA/mW pada panjang gelombang tertentu photodioda honeywell SE3452 mempunyai perbandingan 0.5mA/mW. Jika cahaya yang teradiasi pada cell 2 mV, dioda akan menghasilkan arus yang mengalir sebesar 1 mA (0,5 mA/mW x 2 mV). Respon tertinggi dari SE3452 sekitar 820nm .
Mode operasi.
Photodioda dapat dioperasikan dalam 2 mode yang berbeda:
1. Mode potovoltaik: seperti solar sel, penyerapan pada photodioda menghasilkan tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari energi cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil.
2. Mode potokonduktivitas: disini photodioda diaplikasikan sebagai tegangan reverse (tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda tidak akan dihantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus poto ( hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol). Ketergantungan arus poto pada kekuatan cahaya dapat sangat linier .
Karakteristik bahan photodioda:
1. Silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus antara 400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi sensitivitas baik pada jarak 800 sampai 1700nm (terbaik antara 1300 sampai 1600nm).
Gambar Photodioda ditunjukkan pada gambar 2.8.
Gambar 2.8 Gambar Photodioda (kiri) dan Simbolnya (kanan)
2.7 Dioda Pemancar Cahaya Inframerah (LED inframerah)
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju sambungan p-n terdapat rekombinasi antara elektron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya atau photon tetapi dalam bentuk panas sebagian.
mengeluarkan energinya dalam bentuk radiasi. Dalam dioda penyearah, hampir seluruh energi ini diubah dalam bentuk panas, tetapi dalam LED sebagian dari selisih energi ini dilepaskan sebagai radiasi cahaya.
Proses pemancaran cahaya akibat adanya energi listrik yang diberikan terhadap suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya Galium Arsenida Pospat (GaAsP) atau Galium Pospat (GaP): photon energi cahaya dipancarkan untuk menghasilkan cahaya tampak. Jenis lain dari LED digunakan untuk menghasilkan energi tidak tampak seperti yang dipancarkan oleh pemancar laser atau inframerah.
Gambar 2.9 Simbol dan rangkaian dasar sebuah LED
Pemancar inframerah adalah dioda solid state yang terbuat dari bahan Galium Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias maju. Bila diberi bias maju elektron dari daerah-n akan menutup lubang elektron yang ada didaerah-p. Selama proses rekombinasi ini, energi dipancar keluar dari permukaan p dan n dalam bentuk foton. Foton-foton yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam betuk radiasi energi.Hubungan antara energi foton yang dipancarkan dengan Eg LED ditunjukkan dengan persamaan berikut:
h.c
330 VCC
Dimana Eg = Energi foton
h = Potensial ionisasi (4,136.10-15 eV)
c = Kecepatan cahaya (3.108 m/s) Panjang Gelombang Cahaya (m)
Dengan menggunakan unsur-unsur tersebut di atas, pabrik dapat membuat LED yang memancarkan warna merah, kuning, dan infra merah (tak kelihatan). LED yang menghasilkan pancaran yang kelihatan dapat berguna pada display peralatan, mesin hitung, jam digital, dan lain-lain. LED infra merah dapat digunakan dalam sistem tanda bahaya pencuri dan ruang lingkup lain yang membutuhkan pancaran yang tak kelihatan. Keuntungan dari LED dibandingkan dengan lampu pijar yaitu umurnya yang lebih panjang (lebih dari 20 tahun), teganganya randah (1 sampai 2 V) dan saklar nyala matinya cepat (nano detik).
Sinar inframerah meliputi daerah frekuensi antara 1011 Hz sampai 1014 Hz dan mempunyai daerah panjang gelombang 10-14 cm sampai 10-1 cm. Gelombang inframerah ini dihasilkan oleh elektron – elektron dalam molekul yang bergetar karena benda dipanaskan. Selain tidak dapat dilihat secara langsung, sinar inframerah juga dapat menembus kabut dan awan tebal.
Dengan ciri – cirinya yang spesifik tersebut, pesawat udara yang terbang tinggi ataupun satelit–satelit dapat membuat photo permukaan bumi yang tidak diperoleh dengan menggunakan cahaya inframerah.
frekuensi – frekuensi yang khas dalam inframerah sehingga spektroskopi. Infamerah merupakan salah satu alat penting untuk mempelajari spektrum molekul.
Energi yang terkandung dalam radiasi sinar ini tampak sebagai energi panas, termasuk cahaya yang kita terima dari matahari sejumlah besar mengandung radiasi ini.
2.8 Transistor
Transistor adalah suatu semikonduktor mono kristal dimana terjadi dua pertemuan P-N. Dari pertemuan P-N tersebut dapat dibuat dua tipe transistor yaitu :
1. Transistor PNP
Dalam transistor ini disisipkan suatu lapisan N tipis antara dua lapis P.
Gambar 2.10 Simbol Transistor PNP
2. Transistor NPN
Transistor Sebagai Saklar.
Banyak kegunaan dari transistor, salah satunya adalah sebagai saklar. Jika transistor digunakan sebagai saklar maka dalam hal ini transistor tersebut dioperasikan dalam daerah jenuhnya (saturasi) dan daerah yang menyumbat (cut-off). Pada saat transistor dalam keadaan jenuh maka resistansi antara kolektor dan emitor akan sangat kecil, maka transistor ini akan berfungsi sebagai saklar yang tertutup (ON) sedangkan apabila transistor dalam keadaan cut-off, maka resistansi antara kolektor dan emiter akan sangat besar, maka transistor akan berfungsi sebagai saklar yang terbuka (OFF). Lebih lanjut dapat kita lihat seperti pada gambar 2.12.
v c c
R c
R b
V C C
Gambar 2.12 Transistor Sebagai Saklar
Pada saat transistor ON:
Arus IC = maximum
Tegangan VCE = 0
Paa saat OFF:
Arus IC = 0
Tegangan VCE = Tegangan sumber
Tegangan pada RC = 0
Pada saat basis transistor mengalir arus, transistor dalam keadaan on, maka: IB = Vi . VBE / RB……….(6)
IC = VCE / RC………(7)
Gambar 2.14 Karakteristik Transistor Sebagai Saklar
Parameter-parameter yang terdapat pada rangkaian transistor sebagai saklar antara lain:
Delay Time (td) yaitu waktu tunda antara sinyal masukan dengan keluaran saat
transistor konduksi.
Rise Time (tr), yaitu waktu yang dibutuhkan sinyal input untuk naik dari 10% ke
90% dari harga akhir saat transistor konduksi.
Fall Time (tf), yaitu waktu yang dibutuhkan oleh transistor untuk turun dari 90%
ke 10% dari harga saat transistor off.
Storage Time (ts), yaitu waktu tunda antara sisi-sisi perubahan sinyal masukan
dan sinyal keluaran saat transistor off.
Turn On Time (t-On), yaitu waktu transistor untuk kondisi penuh.
Transistor sebagai driver adalah transistor yang pada saat jenuh akan mengaktifkan komponen atau rangkaian yang lain, dimana variasi arus kolektor penguatannya kecil kalau dibandingkan dengan arus kolektor stasioner. Penguatan sinyal kecil ini dapat diterapkan untuk berbagai rancangan sistim penguatan, penerima dan instrumen ukur.
2.9 Osilator Kristal
Kristal adalah komponen yang dibuat dari bahan alam yang menunjukan efek piezoelektrik, sehingga sering disebut Kristal Piezoelektrik. Bahan utama kristal yang dapat menimbulkan efek piezoelektrik adalah garam rachelle, tourmaline dan quarte.
Dalam sebuah kristal Piezoelektrik, biasanya quartz, mempunyai elektroda-elektroda yang dilapiskan pada permukaan yang berhadapan, dan apabila diberikan suatu potensial pada elektroda-elektrodanya maka gaya akan bekerja pada muatan-muatan yang terikat dalam kristal. Apabila komponen ini dipasang dengan benar, maka dalam kristal akan terjadi deformasi - deformasi sehingga terbentuk suatu sistim elektromekanik yang akan bergetar bila dibandingkan dengan benar. Frekuensi resonansi dan nilai Q (resonansi paralel)-nya tergantung pada dimensi kristal, orientasi permukaan pada sumbu-sumbu kristal dan bagaimana komponen tersebut dipasang ( mounted ). Jangkauan frekuensinya dari beberapa KHz sampai beberapa MHz dan jangkauan nilai Q (resonansi paralel)-nya yang beberapa ribu sampai beberapa ratus ribu data diperoleh secara komersial.
Pada hakikatnya, frekuensi dari suatu osilator kristal hanya dittentukan oleh kristalnya dan tidak oleh komponen lainnya. Lambang Osilator kristal dan ekivalen AC (model listriknya) dapat dilihat pada gambar 2.13.
(a) (b)
Gambar 2.15 (a) Lambang Osilator Kristal,
PERANCANGAN ALAT DAN PROGRAM
3.1. Spesifikasi Alat (Robot)
Source : 6 V / 700 mAh Dimensi (cm) : 40 x 30 x 40
Weight : 3.5 kg
Forklift power : 0.5 kg
3.2 Diagram Blok
Dalam membuat suatu alat ada beberapa hal yang perlu diperhatikan yaitu bagaimana cara merancang alat yang akan dibuat sesuai dasar teori. Sebelum merancang suatu sistim atau rangkaian terlebih dahulu membuat blok diagramnya.
Diagram blok merupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu sistim dan memudahkan untuk melokalisir kesalahan dari suatu sistim.
Dengan diagram blok kita dapat menganalisa cara kerja rangkaian dan merancang hardware yang akan dibuat secara umum. Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih komponen yang memiliki kesatuan kerja tersendiri, dan setiap blok komponen mempengaruhi komponen yang lainnya.
CATU DAYA
Gambar 3.1 Diagram Blok Rangkaian
3.3 Fungsi Tiap Blok
Dinding
Merupakan media yang akan dihindari oleh robot.
Catu Daya
Catu daya pada sistim ini berfungsi untuk mensuplai tegangan keseluruh perangkat sistim yang membutuhkan daya untuk bekerja. Sumber daya yang digunakan pada blok ini adalah sebuah batterai Rechargeable 6 V / 700 mAh.
Sensor Dinding Depan Depan
Sensor Dinding Depan Kiri
Berfungsi untuk mendeteksi dinding pada bagian depan sebelah kiri. Komponen yang digunakan sama seperti yang digunakan pada sensor dinding depan-depan.
Sensor Dinding Depan Kanan
Berfungsi untuk mendeteksi dinding pada bagian depan sebelah kanan. Komponen yang digunakan sama seperti yang digunakan pada sensor dinding depan-depan.
Interface
Interface disini berfungsi sebagai pengolah data masukan dari sensor dinding yang kemudian diumpankan pada mikrokontroler. Disini digunakan IC LM 358 sebagai penguat data masukan dari photodioda
Mikrokontroler AT89S52
Mikrokontroler pada blok ini merupakan pusat proses untuk mengendalikan semua perangkat pada robot. Pada blok ini mikrokontroler telah diprogram untuk dapat membaca data dari sensor kemudian mengolah semua data tersebut dan selanjutnya mengambil keputusan perangkat mana saja yang harus dikendalikan.
Driver Motor
2200uF
5 Volt DC
0 Volt 6,2 Volt DC
6.2 V Motor kanan
Motor ini berfungsi sebagai pemutar roda kanan dari robot. Motor yang digunakan pada bagian ini adalah motor DC 6 V.
Motor Kiri
Motor ini berfungsi sebagai pemutar roda kiri robot. Motor yang digunakan adalah sama seperti yang digunakan pada motor kanan yaitu motor DC 6 V.
3.4 Rangkaian Catu Daya (PSA)
Rangkaian catu daya ini berfungsi untuk mensuplay tegangan ke seluruh rangkaian. Rangkaian ini terdiri dari sebuah baterei 6 volt yang di serikan dengan dua buah dioda. Untuk menembus 1 buah dioda diperlukan tegangan sebesar 0,6 volt, sehingga untuk menembus 2 buah dioda diperlukan tegangan sekitar 1,2 volt, sehingga output dari rangkaian ini sekitar 4,8 volt sampai 5,0 volt. Kemudian dipasang sebuah kapasitor untuk menyimpan arus, sehingga jika tiba-tiba mikrokontroler membutuhkan arus besar, maka arus tersebut dapat disupplay oleh kapasitor ini. Rangkaian catu daya ditunjukkan oleh gambar berikut ini :
Pada rangkaian ini terdapat 2 buah keluaran, yaitu 5 volt dan 6 volt. Keluaran 5 volt dibutuhkan oleh mikrokontroler, penguat sinyal dan rangkaian sensor, sedangkan 6 volt dibutuhkan untuk rangkaian jembatan H ( pengendali motor ).
3.5 Rangkaian Mikrokontroler AT89S52
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Kompoen utama dari rangkaian ini adalah IC mikrokontroler AT89S52. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini:
Gambar 3.3 Rangkaian Mikrokontroler AT89S52
Pin 31 External Access Enable (EA) diset high (H). Ini dilakukan karena mikrokontroler AT89S52 tidak menggunakan memori eskternal. Pin 18 dan 19 dihubungkan ke XTAL 12 MHz dan kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler AT89S52 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif tinggi). Pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroler ini. Pin 32 sampai 39 adalah Port 0 yang merupakan saluran/bus I/O 8 bit open collector dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pin 1 sampai 8 adalah port 1. Pin 21 sampai 28 adalah port 2. Dan Pin 10 sampai 17 adalah port 3. Pin 17 yang merupakan P3.7 dihubungkan dengan transistor dan sebuah LED. Ini dilakukan hanya untuk menguji apakan rangkaian minimum mikrokontroller AT89S52 sudah bekerja atau belum. Dengan memberikan program sederhana pada mikrokontroler tersebut, dapat diketahui apakah rangkaian minimum tersebut sudah bekerja dengan baik atau tidak. Jika LED yang terhubug ke Pin 17 sudah bekerja sesuai dengan perintah yang diberikan, maka rangkaian minimum tersebut telah siap digunakan. Pin 20 merupakan ground dihubungkan dengan ground pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5 volt dari power supplay.
3.6 Perancangan Sensor Dinding dan Pengolah Data Sensor
Masing-VCC
5V
Infra Merah
100 100
Infra Merah 100
masing sensor dinding terdiri dari tiga buah pemancar inframerah yang akan diterima oleh sebuah photodioda. Digunakan tida buah pemancar inframerah pada masing – masing sensor bertujuan agar jarak pemantulan semakin jauh, sehingga robot tidak sampai menyentuh dinding. Dinding dirancang berwarna putih sehingga dapat memantulkan sinar infrared tersebut.
Setiap pantulan yang diterima oleh photodioda akan diolah dan dijadikan data digital, sehingga bila photodioda mendapatkan pantulan dari pemancar inframerah, maka akan mengirimkan sinyal low ke mikrokontroler AT89S52. Dengan demikian mikrokontroler akan dapat mendeteksi sensor yang mengirimkan sinyal low dan mengambil tindakan untuk mengatur putaran roda ke kanan atau ke kiri. Rangkaian pemancar inframerah tampak seperti gambar 3.4.
Gambar 3.4 Rangkaian Pemancar inframerah
5
0, 05 50
100
V
i A atau mA
R
Dengan besarnya arus yang mengalir ke LED inframerah, maka intensitas pancaran inframerah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin jauh.
Pantulan dari sinar inframerah akan diterima oleh potodioda, kemudian diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika photodioda menerima pantulan sinar inframerah maka output dari rangkaian penerima ini akan mengeluarkan logika low (0), namun jika photodioda tidak menerima pantulan sinar inframerah, maka output dari rangkaian penerima akan mengeluarkan logika high (1).
Rangkaian ini menggunakan IC LM 358 sebagai penguat tegangan yang dihasilkan photodioda. Satu buah IC ini memiliki dua penguat operasional (op-amp). Pada rangkaian ini, kedua op-amp tersebut digunakan. Sehingga sinyal dari photodioda mengalami dua kali penguatan.
Sesuai gambar 3.5, maka besar penguatan op-amp tergantung pada besarnya tahanan variabel yang digunakan. Pada prakteknya, tahanan variabel tersebut ditrim pada kisaran harga 50 KOhm, sehingga besar penguatan op-amp adalah:
50
A = = 5 kali 10
Pada robot ini, digunakan satu buah photodioda sebagai sensor dinding. Sebuah photodioda memiliki nilai tahanan sekitar 15 s.d. 20 MOhm jika tidak terkena sinar inframerah, dan memiliki nilai tahanan sekitar 80 s.d. 330 KOhm jika terkena sinar inframerah, tergantung dari intensitas sinar inframerah yang diterimanya.
Dengan demikian, besar tegangan yang masuk ke op-amp adalah: Saat terkena sinar inframerah:
47K
Vo = x 5V = 0,6 Volt 330K + 47K
Saat tidak terkena sinar inframerah:
47K
Vo = x 5V = 0,015 Volt 15000K + 47K
terkena sinar inframerah sekitar 6 Volt dan saat tidak terkena inframerah sekitar 0,14 Volt. Tegangan inilah yang selanjutnya diumpankan ke basis transistor C945.
Transistor akan aktif ketika tegangan basisnya lebih besar dari 0,7 Volt. Maka, ketika basisnya mendapat tegangan 3 Volt (saat photodioda terkena sinar inframerah), transistor aktif. Aktifnya transistor ini akan menyebabkan mikrokontroler mendapatkan logika low dan LED indikator akan mati. Hal sebaliknya akan berlaku ketika photodioda tidak mendapatkan pantulan sinar inframerah.
3.7 Perancangan Driver Penggerak Motor DC (Jembatan H)
Untuk menghindari dinding, maka robot harus dapat mengendalikan perputaran rodanya. Robot menggunakan 2 buah motor DC 6 Volt untuk menggerakkan rodanya, dimana 1 motor digunakan untuk menggerakkan roda kanan dan yang lainnya untuk menggerakkan roda kiri. Motor DC akan berputar searah/berlawanan arah dengan jarum jam jika salah satu kutubnya diberi tegangan positif dan kutub yang lainnya diberi tegangan negatif. Dan motor DC akan berputar kearah sebaliknya jika polaritasnya dibalik. Dengan sifat yang demikian, maka dibutuhkan suatu rangkaian yang dapat membalikkan polaritas yang diberikan ke motor DC tersebut, sehingga perputaran motor DC dapat dikendalikan oleh rangkaian tersebut. Dan jika rangkaian tersebut dihubungkan dengan mikrokontroler AT89S52, maka pergerakan motor dapat dikendalikan oleh program.
Ke-4 transistor ini dirangkai sedemikian rupa sehingga dengan memberikan sinyal low atau high pada rangkaian maka perputaran motor dapat diatur. Pemilihan transistor ini disesuaikan dengan karakteristik arus masukannya ( IB ) dan nilai resistor.
Untuk perintah maju, maka robot akan memutar maju kedua motor, motor kanan dan kiri. Untuk perintah mundur, maka robot akan memutar mundur kedua motor. Sedangkan untuk memutar/berbelok kekanan, maka robot akan memutar maju motor sebelah kiri dan memutar mundur motor sebelah kanan, sehingga dengan demikian maka robot akan memutar/berbelok kearah kanan. Hal sebaliknya dilakukan jika robot berputar ke sebelah kiri. Rangkaian jembatan H, ditunjukkan pada gambar 3.6.
Gambar 3.6. Rangkaian Jembatan H
TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktif (transistor tipe PNP akan aktif jika tegangan pada basis lebih kecil dari 4,34 volt; IB = 0,006A). Aktifnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke emitor sehingga kolektor mendapatkan tegangan 6 volt dari Vcc.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktif (transistor tipe NPN akan aktif jika tegangan pada basis lebih besar dari 0,7 volt; IB = 0,006A). Karena transistor TIP 122 ini tidak aktif, maka kolektornya tidak terhubung ke emitor, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang mendapatkan teganagan 5 volt dari Vcc, maka kolektor dari TIP 122 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kiri mendapatkan tegangan 5 volt (polaritas positif).
Agar motor dapat berputar ke satu arah maka kaki sebelah kanan motor harus mendapatkan tegangan 0 volt (polaritas negatif). Hal ini diperoleh dengan memberikan logika low (0) pada P0.1 mikrokontroler AT89S52.
transistor PNP TIP 127 tidak aktif maka kolektornya tidak terhubung ke emitor sehingga kolektor tidak mendapatkan tegangan 5 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini menjadi aktif. Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke emitor, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan teganagan 0 volt dari ground dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kanan mendapatkan tegangan 0 volt (polaritas negatif). Hal ini akan menyebabkan motor akan berputar ke satu arah tertentu.
Sedangkan untuk memutar motor ke arah sebaliknya, maka logika yang diberikan ke P0.0 adalah low (0) dan logika yang diberikan ke P0.1 adalah high (1).
3.8 Perancangan Program
START
Gambar 3.7 Diagram Alir dari Program
Apabila tidak ada sensor yang aktif (dinding tidak terdeteksi), maka robot akan maju. Demikian seterusnya.
Pergerakan robot diatur logika yang dihasilkan dari sensor dinding. Sensor dinding akan memberikan informasi keberadaan dinding pada mikrokontroler. Mikrokontroler akan mengirimkan perintah untuk mengarahkan robot untuk menghindari dinding (halangan) yang ada.
Program yang dibuat adalah sebagai berikut: utama:
mov a,p2 cjne a,#0ffh,e acall maju ret
e:
cjne a,#0bfh,f acall bel2 sjmp utama f:
cjne a,#0b7h,g acall bel2 sjmp utama g:
sjmp utama h:
cjne a,#0d7h,i acall bel1 sjmp utama i:
cjne a,#0f7h,utama acall bel1
sjmp utama tunda:
mov r7,#100 tnd:
clr p0.4 clr p0.5 clr p0.6 clr p0.7 mov r7,#75 djnz r7,$ ret bel1:
mov r6,#5 belka:
mov r5,#1 belok_kanan: clr p0.0 setb p0.1 clr p0.2 setb p0.3 mov r7,#220 djnz r7,$ acall matibel
djnz r5,belok_kanan djnz r6,belka
mov r6,#5 belki:
mov r5,#1 belok_kiri:
setb p0.0 clr p0.1 setb p0.2 clr p0.3 mov r7,#245 djnz r7,$ acall matibel djnz r5,belok_kiri djnz r6,belki ret
PENGUJIAN DAN ANALISA RANGKAIAN
4.1 Pengujian Rangkaian Catu Daya
Pengujian pada rangkaian catu daya ini dilakukan dengan mengukur tegangan keluaran dari rangkaian ini dengan menggunakan voltmeter. Dari hasil pengujian pada saat baterai penuh, maka didapatkan tegangan keluaran pertama sebesar 6.2 volt dan tegangan keluaran yang kedua sebesar 5.1 volt. Pada saat baterai lemah, maka didapatkan tegangan keluaran pertama sebesar 5,3 volt dan tegangan keluaran yang kedua sebesar 4.5 volt. Walaupun tegangan keluaran pertama tidak tepat 6 volt, dan tegangan keluaran kedua tidak tepat 5 volt, robot tetap bekerja namun jalannya semakin lambat. Hal ini disebabkan karena kurangnya tegangan yang dibutuhkan untuk memutar motor. Dengan demikian rangkaian ini telah berjalan dengan baik.
Vo 1 (Volt)
Vo 2 (Volt)
6,2 5,1
6,2 5,1
6,2 5,1
6,0 5,0
5,8 4,9
5,5 4,7
4.2 Pengujian Rangkaian Mikrokontroler AT89S52
Untuk mengetahui rangkaian mikrokontroler ini sudah bekerja dengan baik, maka dilakukan pengujian. Pengujian ini dilakukan dengan cara memberikan program sederhana pada mikrokontroler AT89S52. Programnya adalah sebagai berikut:
loop:
setb p2.7
acall tunda
clr p2.7
acall tunda
sjmp loop
tunda:
mov r7,#0ffh
tnd:
mov r6,#0ffh
djnz r6,$
djnz r7,tnd
ret
dengan perintah clr p2.7, p2.7 akan berlogika low. Hal ini menyebabkan LED mati. LED akan mati selama beberapa saat karena adanya pemanggilan waktu tunda kembali yang ditandai dengan perintah acall tunda. Keadaan ini akan berulang – ulang, sehingga LED akan terlihat kelap – kelip.
Jika program tersebut diisikan, kemudian nyala LED terlihat kelap – kelip maka rangkaian tersebut telah bekerja dengan baik.
p2.7 LED
1 Nyala
0 Mati
Tabel 4.2 Hasil Pengujian Pada Port 2.7 Mikrokontroler
4.3 Pengujian Rangkaian Sensor Dinding
Rangkaian ini dikatakan baik apabila ketika photodioda terkena pantulan inframerah, LED indikator akan menyala dan tegangan keluarannya jika diukur adalah 0 V. Demikian sebaliknya, ketika photodioda tidak terkena pantulan inframerah, LED tidak akan menyala, dan tegangan kelurannya jika diukur adalah 5 V.
Tabel 4.3 Pengujian Sensor Dinding
4.4 Pengujian Pengendali Pergerakan Motor (Motor driver)
Pengujian pada rangkaian ini dapat dilakukan dengan menghubungkan input rangkaian ini ke rangkaian mikrokontroler AT89S52 dan menghubungkan outputnya ke motor DC.
Langkah selanjutnya adalah mengisikan pada mikrokontroler program sederhana untuk memutar motor DC tersebut. Program yang diisikan ke mikrokontroler AT89S52 untuk memutar motor ke satu arah tertentu adalah:
Setb P0.0
Clr P0.1
Perintah Setb P0.0 akan memberikan logika high ke P0.0 dan perintah Clr P0.1 akan memberikan logika low ke P0.1. Untuk membuat motor berputar kearah sebaliknya adalah,
Clr P0.0
Setb P0.1
Perintah Clr P0.0 akan memberikan logika low ke P0.0 dan perintah Setb P0.1 akan memberikan logika high ke P0.1. Dengan demikian arah perputaran motor sudah dapat dikendalikan oleh program yang diisikan ke mikrokontroler AT89S52.
Dinding Logika Vout (volt)
Terdeteksi 0 0.05
Input Putaran (Motor)
1 0 Kanan
0 1 Kiri
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Photodioda sensitif terhadap cahaya, sehingga mudah terganggu dengan adanya sinar matahari.
2. Makin banyak tambahan sinar infra merah, maka jarak pantulannya pada dinding akan semakin jauh.
3. Data yang dikirimkan oleh sensor akan diolah oleh Mikrokontroler AT89S52 untuk mengambil keputusan pada sistem robot.
4. Robot bekerja secara otomatis untuk menemukan barang dan mengangkatnya tanpa menabrak dinding. Hal ini disebabkan oleh adanya sensor pada robot tersebut.
5.2 Saran
1. Robot pada proyek ini hanya menggukan media Inframerah sebagai pemberi
instruksinya, sehingga dalam pemberian instruksi hanya dapat dilakukan dari jarak yang dekat, maka sebaiknya pemberian instruksi pada robot dilakukan dari jarak jauh ataupun menggunakan radio frekuensi.
3. Sensor yang digunakan pada robot sebaiknya menggunakan komponen yang lebih berkualitas agar dapat menghasilkan pembacaan yang optimal.
Agfianto, Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Edisi Kedua, Penerbit: Gava Media, Yogyakarta, 2004
Andi, Panduan Praktis Teknik Antarmuka dan Pemrograman Mikrokontroler AT89C51, Penerbit PT Elex Media Komputindo, Jakarta 2003
Malvino, Albert paul, Prinsip-prinsip Elektronika, Jilid 1 & 2, Edisi Pertama, Penerbit: Salemba Teknika, Jakarta, 2003.