TUGAS AKHIR
RISA YUNITA 052408067
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PROTO TYPE PERANCANGAN MOBIL ROBOT ANTI MENABRAK DINDING
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
RISA YUNITA 052408067
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PROTO TYPE PERANCANGAN MOBIL ROBOT ANTI MENABRAK DINDING
Kategori : TUGAS AKHIR
Nama : RISA YUNITA
Nomor Induk Mahasiswa : 052408067
Program Studi : DIPLOMA III FISIKA INSTRUMENTASI
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, 24 Juli 2008
Diketahui/Disetujui oleh
Departemen Fisika FMIPA USU
Ketua Program Studi D3 FIN Pembimbing
iii
PERNYATAAN
PROTO TYPE PERANCANGAN MOBIL ROBOT ANTI MENABRAK DINDING
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2008
PENGHARGAAN
Syukur Alhamdulillah berkat Rahmat dan Karunia-NYA penulis dapat menyelesaikan tugas akhir ini. Salawat dan salam kepada Rasulullah Muhammad SAW.
Tugas akhir ini berjudul PROTOTYPE PERANCANGAN MOBIL ROBOT ANTI MENABRAK DINDING. Meskipun dalam proses penulisan banyak menemui hambatan dan rintangan namun dengan usaha maksimal yang dilakukan penulis serta bantuan dari berbagai pihak, akhirnya tugas akhir ini dapat selesai. Atas bantuan dan motivasi yang diberikan, maka penulis mengucapkan banyak terima kasih kepada : Bapak Drs.Nasruddin MN. M,Eng.Sc selaku pembimbing, Bapak DR. Eddy Marlianto, M.Sc selaku Dekan FMIPA USU, Bapak Drs. Syahrul Humaidi M.Sc selaku Ketua Jurusan Program Studi Fisika Instrumentasi, Bapak DR. Marhaposan Situmorang selaku Ketua Departemen Fisika. Seluruh Dosen yang telah memberikan ilmu pengetahuan selama perkuliahan, yang membuka cakrawala berfikir serta pegawai tata usaha yang ikut mensukseskan proses belajar mengajar. Rekan-rekan di Fisika Instrumentasi, Laidy D Ginting, Fitri A Siregar, terima kasih atas motivasi, kritik dan sarannya terhadap tugas akhir ini. Dan kepada Bryan Habsyah terima kasih atas bantuan dan dukungannya. Khususnya M. Abduh Riza yang telah memberikan semangat dalam menyelesaikan tugas akhir ini Akhirnya terima kasih kepada Ayahanda dan Ibunda yang telah memberikan didikan terbaik bagi penulis. Penulis menyadari bahwa dalam penyusunan tugas akhir ini masih terdapat kekurangan dan masih jauh dari kesempurnaan. Oleh Karena itu penulis sangat terbuka terhadap saran maupun kritikan dalam sebuah diskusi yang membangun dari pembaca.
v
ABSTRAK
Robot adalah sebuah benda yang dapat bekerja cepat, teliti dan tidak mengenal lelah. Robot yang dapat berpindah tempat tanpa campur tangan manusia disebut juga dengan AMR(Autonomous Mobile Robot).
Untuk merancang sebuah robot diperlukan sebuah chip yang ringkas namun dapat bekerja layaknya seperti sebuah komputer. Mikrokontroler AT89S51 merupakan chip produksi Atmel Inc yang mempunyai fitur dasar yang cukup lengkap untuk pemrosesan input-output sehingga mikrokontroler AT89S51 cukup memenuhi syarat untuk menjadi pusat operasi sebuah AMR.
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak v
Daftar Isi vi
Daftar Gambar viii
Daftar Tabel ix
BAB 1 PENDAHULUAN 1
1.1Latar Belakang 1
1.2Rumusan Masalah 2
1.3Tujuan Proyek 2
1.4Batasan Masalah 3
1.5Sistematika Penulisan 3
BAB 2 LANDASAN TEORI 5
2.1 Definisi AT89S51 5
2.2 Fotodioda 9
2.3 Dioda Pemancar Cahaya Infra Merah (LED infra merah) 11
2.4 Motor DC 12
2.5 Torsi Motor 14
2.6 Transistor 15
BAB 3 RANCANGAN SISTEM 16
3.1 Perangkat Keras 16
3.1.1 Diagram Blok 16
3.1.2 Rangkaian Mikrokontroler AT89S51 17 3.1.3 Rangkaian Sensor Dinding 19 3.1.4 Rangkaian Pengendali Pergerakan Motor (Jembatan H) 22
3.1.5 Rangkaian Catu Daya 26
3.2 Perangkat Lunak 27
3.2.1 Bahasa Assembly MCS-51 27 3.2.2 Software 8051 Editor, Assembler, Simulator (IDE) 30
3.2.3 Software Downloader 31
3.2.4 Perancangan Program 31
BAB 4 PENGUJIAN RANGKAIAN 35
vii
BAB 5 KESIMPULAN DAN SARAN 45
5.1 Kesimpulan 45
5.2 Saran 45
Daftar Pustaka 47
DAFTAR GAMBAR
Halaman Gambar 2.1 IC Mikrokontroler AT89S51 7
Gambar 2.2 Fotodioda(kiri)dan Simbolnya(kanan) 10 Gambar 2.3 Simbol dan Rangkaian Dasar Sebuah LED 11 Gambar 2.4 Bentuk Fisik Dari Motor DC Magnet Permanen 12
Gambar 2.5 Prinsip Motor 12
Gambar 2.6 Hukum Tangan Kanan Motor 13 Gambar 2.7 Operasi Motor DC Magnet Permanen 13
Gambar 2.8 Simbol Transistor 15
Gambar 3.1 Diagram Blok Rangkaian 16 Gambar 3.2 Rangkaian Mikrokontroler AT89S51 18 Gambar 3.3 Rangkaian Pemancar Infra Merah 20 Gambar 3.4 Rangkaian Penerima Sinar Infra Merah 21
Gambar 3.5 Rangkaian Jembatan H 24
Gambar 3.6 Rangkaian Catu Daya 27
Gambar 3.7 8051 Editor, Assembler, Simulator (IDE) 30 Gambar 3.8 ISP-Flash Programmer 3.a 31
Gambar 4.1 Rangkaian Catu Daya 35
Gambar 4.2 Rangkaian Pemancar Dan Penerima Infra Merah 38
ix
DAFTAR TABEL
ABSTRAK
Robot adalah sebuah benda yang dapat bekerja cepat, teliti dan tidak mengenal lelah. Robot yang dapat berpindah tempat tanpa campur tangan manusia disebut juga dengan AMR(Autonomous Mobile Robot).
Untuk merancang sebuah robot diperlukan sebuah chip yang ringkas namun dapat bekerja layaknya seperti sebuah komputer. Mikrokontroler AT89S51 merupakan chip produksi Atmel Inc yang mempunyai fitur dasar yang cukup lengkap untuk pemrosesan input-output sehingga mikrokontroler AT89S51 cukup memenuhi syarat untuk menjadi pusat operasi sebuah AMR.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Manusia membutuhkan bantuan dari sesuatu yang dapat bekerja cepat, teliti dan tidak mengenal lelah, robot adalah jawaban dari keinginan tersebut. Robot diharapkan dapat bekerja pada lingkungan yang berbahaya bagi kesehatan atau daerah yang harus diamati dengan pengamatan lebih dari kemampuan panca indera manusia.
Robot yang dapat berpindah tempat tanpa campur tangan manusia disebut juga
Autonomous Mobile Robot (AMR). Pada proyek ini dibangun sebuah AMR yang
dapat bergerak mengitari ruangan tanpa menabrak dinding, dengan memanfaatkan pemancar infra merah dan fotodioda sebagai penerima dari pantulan infra merah yang dipantulkan dari dinding. Aplikasi AMR antara lain sebagi penyapu ranjau, kurir, dan penelitian objek mineral batuan planet di luar angkasa.
AT89S51 adalah chip mikrokontroler produksi Atmel Inc. merupakan keluarga dari MCS-51 rancangan Intel. AT89S51 mempunyai fitur dasar yang cukup lengkap untuk suatu pemrosesan input-output. Bahasa pemrograman yang digunakan AT89S51 hampir tidak berbeda jauh dengan instruksi set pada mikroprosesor Intel yang sudah dipelajari pada perkuliahan.
1.2 Rumusan Masalah
Berdasarkan uraian diatas, penulis tertarik untuk mengangkat permasalahan tersebut ke dalam bentuk tugas akhir dengan judul “PROTOTYPE PERANCANGAN MOBIL ROBOT ANTI MENABRAK DINDING”. Pada alat ini akan digunakan rangkaian sensor dinding, rangkaian mikrokontroler, rangkaian pengendali motor, rangkaian penguat sinyal dan rangkaian power supply untuk menghindari adanya penghalang atau dinding.
1.3 Tujuan Penulisan
1. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga (D-III) Fisika Instrumentasi FMIPA Universitas Sumatera Utara.
2. Studi awal dalam pembuatan Robot otomatis yang dapat menghindari dinding atau penghalang.
3
1.4 Batasan masalah
Tujuan dilakukan penulisan tugas akhir ini adalah sebagai berikut :
a. Robot hanya dilengkapi dengan sensor dinding, tidak dilengkapi dengan sensor lantai, jadi tidak dapat mendeteksi lubang.
b. Pemancar yang digunakan adalah infra merah dan penerimanya adalah fotodioda, sehingga dinding hanya terdeteksi dari jarak yang dekat.
c. Robot hanya mengetahui bahwa ada dinding di depannya, tidak mengetahui jarak dinding.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari mobil robot anti menabrak dinding ini.
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, rumusan masalah, tujuan penulisan, batasan masalah serta sistematika penulisan.
BAB 2 LANDASAN TEORI
Landasan teori dalam bab ini meliputi arsitektur dan konstruksi mikrokontroler yang digunakan. Selain itu juga membahas tentang motor DC dan jenis sensor yang digunakan.
BAB 3 RANCANGAN SISTEM
BAB 4 PENGUJIAN RANGKAIAN
Meliputi pembahasan rangkaian dan program yang dijalankan serta pengujian rangkaian.
BAB 5 KESIMPULAN DAN SARAN
BAB 2
LANDASAN TEORI
2.1 Defenisi AT89S51
Mikrokontroler AT89S51 hanya memerlukan tambahan 3 kapasitor, 1 resistor dan 1
kristal serta catu daya 5 Volt. Kapasitor 10 mikro-Farad dan resistor 10 Kilo Ohm
dipakai untuk membentuk rangkaian reset. Dengan adanya rangkaian reset ini
AT89S51 otomatis direset begitu rangkaian menerima catu daya. Kristal dengan
frekuensi maksimum 24 MHz dan kapasitor 30 piko-Farad dipakai untuk melengkapi
rangkaian osilator pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
Memori merupakan bagian yang sangat penting pada mikrokontroler.
Mikrokontroler memiliki dua macam memori yang sifatnya berbeda. Read Only
Memory (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai
dangan keperluannya, dalam susunan MCS-51 memori penyimpanan program ini
dinamakan sebagai memori program. Random Access Memori (RAM) isinya akan
sirna begitu IC kehilangan catu daya, dipakai untuk menyimpan data pada saat
program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai
Ada berbagai jenis ROM. Untuk mikrokontroler dengan program yang sudah
baku dan diproduksi secara massal, program diisikan ke dalam ROM pada saat IC
mikrokontroler dicetak di pabrik IC. Untuk keperluan tertentu mikrokontroler
menggunakan ROM yang dapat diisi ulang atau Programble-Eraseable ROM yang
disingkat menjadi PEROM atau PROM. Dulu banyak dipakai UV-EPROM (Ultra
Violet Eraseable Progamble ROM) yang kemudian dinilai mahal dan ditinggalkan
setelah ada flash PEROM yang harganya jauh lebih murah.
Jenis memori yang dipakai untuk Memori Program AT89S51 adalah Flash
PEROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat
bantuan alat yang dinamakan sebagai AT89S51 Flash PEROM Programmer.
Memori Data yang disediakan dalam chip AT89S51 sebesar 128 byte,
meskipun hanya kecil saja tapi untuk banyak keperluan memori kapasitas itu sudah
cukup. Sarana Input/Ouput yang disediakan cukup banyak dan bervariasi. AT89S51
mempunyai 32 jalur Input/Ouput. Jalur Input/Ouput paralel dikenal sebagai Port 1
7
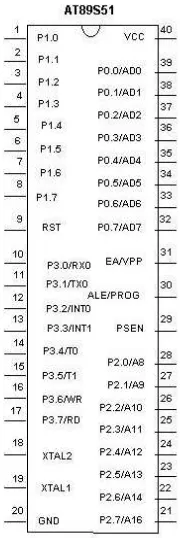
Gambar 2.1. IC Mikrokontroler AT89S51
Deskripsi pin-pin pada mikrokontroler AT89S51 :
VCC (Pin 40)
Suplai tegangan
GND (Pin 20)
Ground
Port 0 (Pin 39-Pin 32)
Port 0 dapat berfungsi sebagai I/O biasa, low order multiplex address/data ataupun
penerima kode byte pada saat flash programming. Pada fungsi sebagai I/O biasa port
ini dapat memberikan output sink ke delapan buah TTL input atau dapat diubah
sebagai input dengan memberikan logika 1 pada port tersebut. Pada fungsi sebagai
low order multiplex address/data, port ini akan mempunyai internal pull up. Pada saat
flash programming diperlukan eksternal pull up, terutama pada saat verifikasi
Port 2 (Pin 21 – pin 28)
Port 2 berfungsi sebagai I/O biasa atau high order address, pada saat mengakses
memori secara 16 bit. Pada saat mengakses memori 8 bit, port ini akan mengeluarkan
isi dari P2 special function register. Port ini mempunyai internal pull up dan berfungsi
sebagai input dengan memberikan logika 1. Sebagai output, port ini dapat
memberikan output sink keempat buah input TTL.
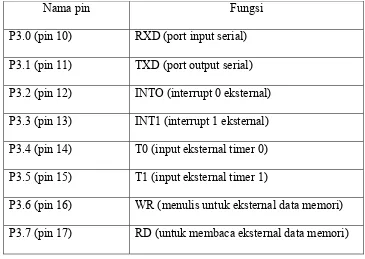
Port 3 (Pin 10 – Pin 17)
Port 3 merupakan 8 bit port I/O dua arah dengan internal pull up. Port 3 juga
mempunyai fungsi pin masing-masing.
Tabel 2.1 Fungsi pin pada port 3
Nama pin Fungsi
P3.0 (pin 10) RXD (port input serial)
P3.1 (pin 11) TXD (port output serial)
P3.2 (pin 12) INTO (interrupt 0 eksternal)
P3.3 (pin 13) INT1 (interrupt 1 eksternal)
P3.4 (pin 14) T0 (input eksternal timer 0)
P3.5 (pin 15) T1 (input eksternal timer 1)
P3.6 (pin 16) WR (menulis untuk eksternal data memori)
P3.7 (pin 17) RD (untuk membaca eksternal data memori)
RST (pin 9)
9
ALE/PROG (pin 30)
Address latch Enable adalah pulsa output untuk me-latch byte bawah dari alamat
selama mengakses memori eksternal. Selain itu, sebagai pulsa input program (PROG)
selama memprogram Flash.
PSEN (pin 29)
Program store enable digunakan untuk mengakses memori program eksternal.
EA (pin 31)
Pada kondisi low, pin ini akan berfungsi sebagai EA yaitu mikrokontroler akan
menjalankan program yang ada pada memori eksternal setelah sistem direset. Jika
kondisi high, pin ini akan berfungsi untuk menjalankan program yang ada pada
memori internal. Pada saat flash programming, pin ini akan mendapat tegangan 12
Volt.
XTAL1 (pin 19)
Input untuk clock internal.
XTAL2 (pin 18)
Output dari osilator.
2.2 Fotodioda
Fotodioda biasanya digunakan untuk mendeteksi cahaya. Fotodioda adalah piranti
semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisan
intrinsik antara lapisan n dan p. Ketika energi cahaya dengan panjang gelombang yang
benar jatuh pada sambungan fotodioda, arus mengalir dalam sirkit eksternal. Alat ini
cahaya itu. Silikon merupakan bahan yang paling banyak digunakan untuk fotodioda
dan memberikan waktu reaksi sebesar 1ns.
Mode operasi
Fotodioda dapat dioperasikan dalam 2 mode yang berbeda:
1. Mode fotovoltaik: seperti solar sel, penyerapan pada fotodioda menghasilkan
tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari
tenaga cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil.
2. Mode fotokonduktivitas : fotodioda diaplikasikan sebagai tegangan revers
(tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada
dioda tidak akan menghantarkan tanpa terkena cahaya) dan pengukuran
menghasilkan arus foto. ( Hal ini juga bagus untuk mengaplikasikan tegangan
mendekati nol). Ketergantungan arus foto pada kekuatan cahaya sangat linier .
Karakteristik bahan fotodioda:
1. Silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus
antara 400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
2. Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas baik
antara 600 nm sampai 1800 nm (terbaik 1400 sampai 1500 nm).
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan
tinggi sensitivitas baik pada jarak 800 sampai 1700nm (terbaik antara 1300
sampai 1600nm).
11
2.3 Dioda Pemancar Cahaya Infra Merah (LED infra merah)
LED adalah dioda yang menghasilkan cahaya saat diberi energi listrik. Dalam bias
maju sambungan p-n terdapat rekombinasi antara elektron bebas dan lubang (hole).
Energi ini tidak seluruhnya diubah kedalam bentuk energi cahaya atau foton
melainkan dalam bentuk panas sebagian.
Proses pemancaran cahaya akibat adanya energi listrik yang diberikan
terhadap suatu bahan disebut dengan sifat elektroluminesensi. Material lain misalnya
Galium Arsenida Pospat (GaAsP) atau Galium Pospat (GaP): Foton energi cahaya
dipancarkan untuk menghasilkan cahaya tampak. Jenis lain dari LED digunakan untuk
menghasilkan energi tidak tampak seperti yang dipancarkan oleh pemancar laser atau
infra merah.
330Ω VCC
5V
Gambar 2.3 Simbol dan rangkaian dasar sebuah LED
Pemancar inframerah adalah dioda solid state yang terbuat dari bahan Galium
Arsenida (GaAs) yang mampu memancarkan fluks cahaya ketika dioda ini dibias
maju. Bila diberi bias maju elektron dari daerah-n akan menutup lubang elektron yang
ada didaerah-p. Selama proses rekombinasi ini, energi dipancar keluar dari permukaan
p dan n dalam bentuk foton. Foton-foton yang dihasilkan ini ada yang diserap lagi dan
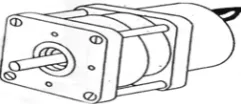
2.4 Motor DC
Pada peristiwa mesin listrik dapat berlaku sebagai generator, perbedaannya hanya
terletak dalam konversi dayanya. Generator adalah suatu mesin listrik yang mengubah
daya masuk mekanik menjadi daya keluar listrik, sedangkan sebaliknya motor
mengubah daya masuk listrik menjadi daya keluar mekanik. Tujuan motor adalah
untuk menghasilkan gaya yang menggerakkan (torsi). Motor DC yang digunakan
disini adalah motor DC magnet permanen yaitu motor yang fluks magnet utamanya
dihasilkan oleh magnet permanen. Berikut adalah bentuk fisik dari motor DC magnet
permanen dan prinsip motor serta operasi motor magnet permanen dapat kita lihat
pada gambar berikut :
Gambar 2.4. Bentuk Fisik dari Motor DC Magnet Permanen
13
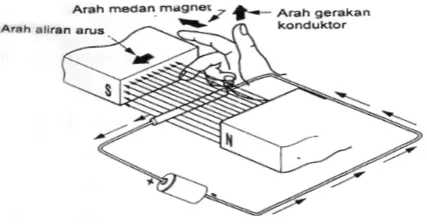
Gambar 2.6. Hukum Tangan Kanan Motor
Gambar 2.7. Operasi Motor DC Magnet Permanen
Pada gambar 2.7 (a), jangkar berputar searah dengan putaran jarum jam.
Apabila kutub jangkar segaris dengan kutub medan, sikat – sikat ada pada celah di
komutator dan tidak ada arus mengalir pada jangkar. Jadi, gaya tarik atau gaya tolak
magnet berhenti, seperti pada gambar 2.7 (b).
Kemudian kelembaman membawa jangkar melewati titik netral. Komutator
membalik arus jangkar ketika kutub yang tidak sama dari jangkar dan medan
kutub yang sama dari jangkar dan medan kemudian saling menolak, menyebabkan
jangkar berputar terus – menerus seperti pada gambar 2.7 ( c ).
2.5 Torsi Motor
Torsi motor didefinisikan sebagai aksi dari suatu gaya pada motor yang dapat
mempengaruhi beban untuk ikut bergerak. Ketika sumber tegangan dihubungkan pada
brush (sikat) motor, maka arus yang mengalir masuk ke kutub positif brush, melalui
komutator dan kumparan, serta keluar melalui daerah kutub negatif dari brush. Pada
saat yang bersamaan, arus juga mengalir melalui kumparan medan magnet. Penerapan
kaidah tangan kanan pada konduktor yang berada di bawah kutub memperlihatkan
kumparan medan magnet yang memperkuat gaya keatas agar dapat mendorong
konduktor.
Arah arus kumparan untuk putaran searah jarum jam. Ketika kumparan
medan magnet berada dibawah posisi kutub selatan, gaya akan memotong ke arah
kanan, kemudian menekan ke bawah, sedangkan kutub utara selanjutnya akan
bergerak mendorong ke arah kiri di bawah kutub selatan, sehingga terbentuk suatu
arah gaya yang dapat mengakibatkan konduktor yang bergerak searah dengan arah
jarum jam. Dalam kondisi kumparan yang berputar dimana konduktor bergerak di
bawah kutub menuju ke kondisi arus menjadi reverse karena komutator. Dari proses
tersebut diperoleh suatu kenyataan yang sama bila arus yang mengalir melalui
kumparan dalam kondisi reverse dengan membalik posisi kumparan. Namun arahnya
akan meninggalkan polaritas medan yang bersangkutan, maka torsi yang dibangkitkan
akan bergerak ke arah yang berlawanan dengan arah jarum jam.
Sedangkan torsi yang dibangkitkan pada motor dc merupakan gabungan
aksi dari fluks medan (Φ), arus kumparan armatur (Ia) yang menghaslakn medan
magnet di daerah sekitar konduktor. Oleh karena itu diperoleh persamaan torsi (T)
sebagai berikut:
15
2.6 Transistor
Transistor merupakan alat dengan tiga terminal seperti yang diperlihatkan oleh simbol
pada gambar 2.8. Simbol kedua jenis transistor itu hampir sama. Perbedaannya
terletak pada arah panah di ujung emitter. Seperti yang telah diketahui, arah panah ini
menunjukkan arah aliran arus konvensional yang berlawanan arah dalam kedua jenis
tadi tetapi selalu dari bahan jenis p ke n dalam sirkit emitter dasar. Untuk
menghindarkan kesalahan, transistor yang dibicarakan disini selalu npn, kecuali
bahwa polaritas tegangan suplai pada sirkit memakai transistor jenis pnp terbalik dan
arus mengalir dalam arah yang berlawanan dengan sirkit yang memakai transistor npn.
c
▌
e
(a)
c
▌
e
(b)
BAB 3 BAB 3 RANCANGAN SISTEM RANCANGAN SISTEM 3.1 PERANGKAT KERAS
3.1 PERANGKAT KERAS
3.1.1 Diagram Blok 3.1.1 Diagram Blok
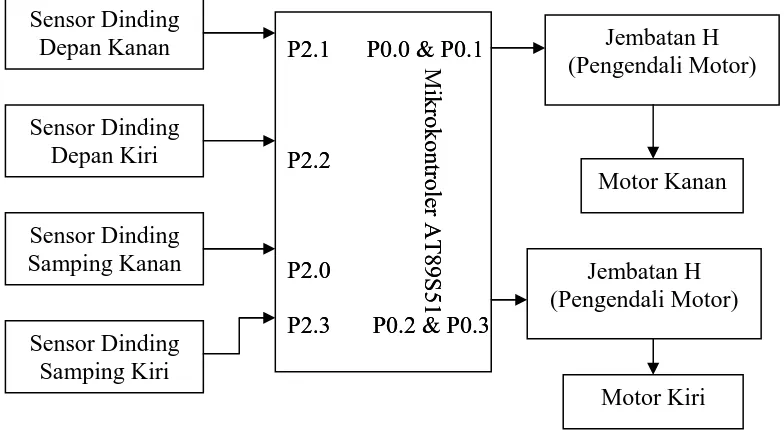
Secara garis besar, diagram blok rangkaian dari robot pendeteksi dinding ini ditunjukkan pada gambar 3.1 berikut ini :
Secara garis besar, diagram blok rangkaian dari robot pendeteksi dinding ini ditunjukkan pada gambar 3.1 berikut ini :
Mikrokontroler AT89S51
ikrokontroler AT89S5
P2.1 P0.0 & P0.1 P2.1 P0.0 & P0.1
Sensor Dinding
Depan Kanan Jembatan H
(Pengendali Motor) P2.2 P2.2 Sensor Dinding Depan Kiri Motor Kanan P2.0 P2.0 Sensor Dinding Samping Kanan
P2.3 P0.2 & P0.3
1
P2.3 P0.2 & P0.3
Jembatan H (Pengendali Motor) Sensor Dinding Samping Kiri Motor Kiri
Gambar 3.1 Diagram Blok Rangkaian Gambar 3.1 Diagram Blok Rangkaian
17
dinding yang berada di depan kiri dihubungkan ke P2.2 dari mikrokontroler AT89S51, sensor dinding yang berada di samping kanan dihubungkan ke P2.0 dari mikrokontroler AT89S51, dan sensor dinding yang berada di samping kiri dihubungkan ke P2.3 dari mikrokontroler AT89S51.
Untuk mengendalikan pergerakan motor, digunakan jembatan H, dimana jembatan H ini dapat memutar motor searah/berlawanan arah dengan jarum jam bila diberi pulsa 1 atau 0. Dengan demikian pergerakan motor dapat dikendalikan melalui program. Roda sebelah kanan dihubungkan dengan jembatan H yang terhubung ke P0.0 dan P0.1, sedangkan roda sebelah kiri dihubungkan dengan jembatan H yang terhubung dengan P0.2 dan P0.3.
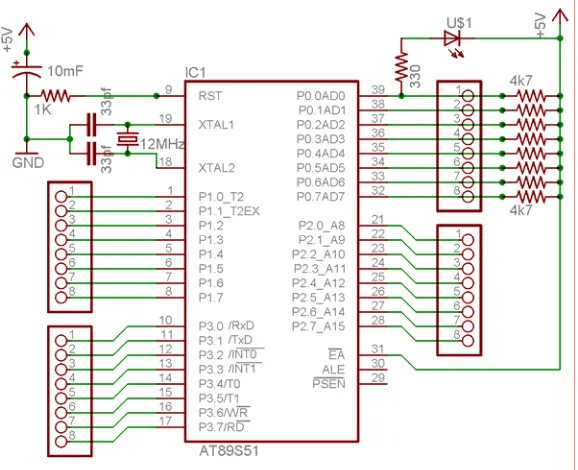
3.1.2 Rangkaian Mikrokontroler AT89S51
Gambar 3.2 Rangkaian mikrokontroler AT89S51
19
minimum tersebut telah siap digunakan. Pin 20 merupakan ground dihubungkan dengan ground pada power supplay. Pin 40 merupakan sumber tegangan positif dihubungkan dengan + 5 volt dari power supplay.
3.1.3 Rangkaian Sensor Dinding
Untuk dapat mendeteksi dinding, maka robot dilengkapi dengan 4 buah sensor dinding. Keempat sensor dinding ini mempunyai rangkaian yang sama, hanya penempatannya saja yang berbeda.
Masing-masing sensor dinding menggunakan 2 buah pemancar infra merah dan sebuah fotodioda. Sensor ini memanfaatkan pantulan dari pemancar infra merah yang diterima oleh fotodioda. Digunakan 2 buah pemancar infra merah pada masing-masing sensor bertujuan agar sinyal pantulan semakin kuat, sehingga posisi sensor tidak terlalu dekat dengan dinding.
Dinding yang digunakan adalah dinding berwarna putih, dengan demikian ketika sensor mengenai dinding, maka pantulan dari infra merah akan mengenai fotodioda. Sedangkan jika sensor tidak mengenai dinding, maka pancaran sinar infra merah tidak mengenai fotodioda. Perbedaan intensitas pantulan inilah yang digunakan untuk mendeteksi adanya dinding yang berada di depan robot.
mikrokontroler dapat mendeteksi sensor yang mengirimkan sinyal low dan mengambil tindakan untuk mengatur putaran roda kekanan atau kekiri.
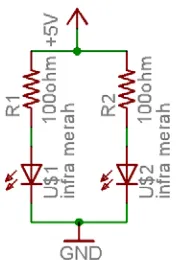
[image:31.595.272.361.191.321.2]Rangkaian pemancar infra merah tampak seperti gambar ini:
Gambar 3.3 Rangkaian Pemancar infra merah
Pada rangkaian di atas digunakan 2 buah LED infra merah yang diparalelkan, dengan demikian maka intensitas yang dipancarkan oleh infra merah semakin kuat, karena merupakan gabungan dari dua buah LED infra merah. Resistor yang digunakan adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED
infra merah adalah sebesar: 5 0, 05 50 100
V
i A atau mA
R
= = =
Dengan besarnya arus yang mengalir ke LED infra merah, maka intensitas pancaran infra merah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin jauh.
21
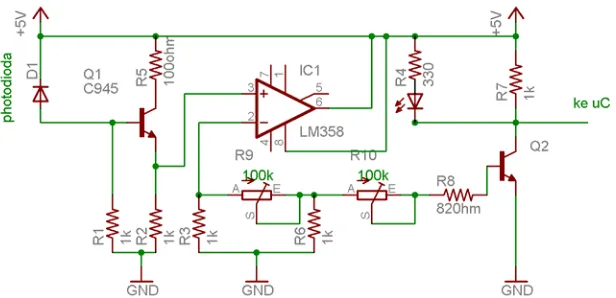
[image:32.595.154.462.158.307.2]sinar infra merah, maka output dari rangkaian penerima akan mengeluarkan logika high (1). Rangkaian penerima infra merah seperti gambar ini:
Gambar 3.4 Rangkaian Penerima sinar infra merah
Fotodioda dioperasikan pada bias balik, dimana fotodioda ini akan memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar infra merah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Pada rangkaian di atas, output dari fotodioda diumpankan ke basis transistor tipe NPN C945, ini berarti untuk membuat transistor tersebut saturasi maka tegangan yang keluar dari fotodioda harus lebih besar dari 0,7 volt. Syarat ini akan terpenuhi jika fotodioda mendapatkan sinar infra merah. Analisanya sebagai berikut:
Jika tidak ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda 15 Mohm, sehingga:
2 330.000
5 0,107 1 2 15.000.000 330.000
R
Vo xVcc x Volt
R R
= = =
+ +
Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda 300 Kohm, sehingga:
2 330.000
5 2, 619 1 2 300.000 330.000
R
Vo xVcc x Volt
R R
= = =
+ +
Vout akan diumpankan ke basis transistor C945, karena tegangannya lebih besar dari 0,7 volt yaitu 2,619 Volt maka transistor akan saturasi.
Emitter transistor C945 diinputkan ke Op Amp LM 358 untuk diperkuat. LM358 merupakan IC penguat dengan dua Op Amp. Pada Op Amp pertama tegangan input akan diperkuat sampai maksimal 100 kali penguatan, dimana:
Ω = K R A Potensio V 1
Penguatan ini dapat diatur dengan mengatur hambatan pada potensio. Output Op Amp pertama akan diperkuat lagi sampai maksimum 100 kali penguatan. Dengan demikian penguatan dapat diatur sesuai dengan yang dikehendaki.
LED ini akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
3.1.4 Rangkaian Pengendali Pergerakan Motor (Jembatan H)
23
Motor DC akan berputar searah/berlawanan arah dengan jarum jam jika salah satu kutubnya diberi tegangan positif dan kutub yang lainnya diberi tegangan negatif atau ground. Dan motor DC akan berputar kearah sebaliknya jika polaritasnya dibalik. Dan jika rangkaian tersebut dihubungkan dengan mikrokontroler AT89S51, maka pergerakan motor dapat dikendalikan oleh program.
Rangkaian untuk mengendalikan perputaran motor DC tersebut adalah sebuah rangkaian yang dikenal dengan jembatan H. Jembatan H ini terdiri dari 4 buah transistor, dimana 2 buah transistor bertipe NPN dan 2 buah transistor lagi bertipe PNP. Ke-4 transistor ini dirangkai sedemikian rupa sehingga dengan memberikan sinyal low atau high pada rangkaian maka perputaran motor dapat diatur.
Rangkaian jembatan H, ditunjukkan pada gambar ini:
[image:35.595.89.544.110.342.2]
Gambar 3.5 Rangkaian Jembatan H
Pada rangkaian di atas, jika P0.0 diset high yang berarti P0.0 mendapat tegangan 5 volt, maka kedua transistor tipe NPN C945 yang disebelah kiri akan aktif. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan mendapat tegangan 0 volt dari ground. Kolektor dari transistor C945 yang berada di sebelah kiri atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktif (transistor tipe PNP akan aktif jika tegangan pada basis lebih kecil dari 4,34 volt). Aktifnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke emiter sehingga kolektor mendapatkan tegangan 5 volt dari Vcc.
25
Karena transistor TIP 122 ini tidak aktif, maka kolektornya tidak terhubung ke emiter, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang mendapatkan tegangan 5 volt dari Vcc, maka kolektor dari TIP 122 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kiri mendapatkan tegangan 5 volt (polaritas positif).Agar motor dapat berputar ke satu arah maka kaki sebelah kanan motor harus mendapatkan tegangan 0 volt (polaritas negatif). Hal ini diperoleh dengan memberikan logika low (0) pada P0.1 mikrokontroler AT89S51.
Pada rangkaian di atas, jika P0.1 di set low yang berarti P0.1 mendapat tegangan 0 volt, maka kedua transistor tipe NPN C945 yang disebelah kanan tidak akan aktif. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan mendapat tegangan 5 volt dari Vcc. Kolektor dari transistor C945 yang berada di sebelah kanan atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor TIP 127 mendapatkan tegangan 5 volt yang menyebabkan transistor ini tidak aktif. Karena transistor PNP TIP 127 tidak aktif maka kolektornya tidak terhubung ke emiter sehingga kolektor tidak mendapatkan tegangan 5 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di bawahnya.
Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke emiter, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan teganagan 0 volt dari ground dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kanan mendapatkan tegangan 0 volt (polaritas negatif). Hal ini akan menyebabkan motor akan berputar ke satu arah tertentu. Sedangkan untuk memutar motor ke arah sebaliknya, maka logika yang diberikan ke P0.0 adalah low (0) dan logika yang diberikan ke P01. adalah high (1).
3.1.5 Rangkaian catu daya
27
Gambar 3.6 Rangkaian catu daya
Pada rangkaian ini terdapat dua buah keluaran, yaitu 5 volt dan 6 volt. Keluaran 5 volt dibutuhkan untuk mikrokontroler, rangkaian sensor dan penguat sinyal. Sedangkan 6 volt dibutuhkan untuk rangkaian jembatan H (pengendali motor).
3.2 PERANGKAT LUNAK
3.2.1 Bahasa Assembly MCS-51
Bahasa yang digunakan untuk memprogram IC mikrokontroler AT89S51 adalah bahasa assembly untuk MCS-51. Angka 51 merupakan jumlah instruksi, pada bahasa ini hanya ada 51 instruksi. Dari 51 instruksi, yang sering digunakan orang hanya 10 instruksi. Instruksi –instruksi tersebut antara lain :
1. Instruksi MOV
Perintah ini merupakan perintah untuk mengisikan nilai ke alamat atau register tertentu. Pengisian nilai dapat secara langsung atau tidak langsung.
Contoh pengisian nilai secara langsung MOV R0,#20h
Contoh pengisian nilai secara tidak langsung: MOV 20h,#80h
... ... MOV R0,20h
Perintah di atas berarti : isikan nilai yang terdapat pada alamat 20 Heksadesimal ke register 0 (R0).
Tanpa tanda # sebelum bilangan menunjukkan bahwa bilangan tersebut adalah alamat.
2. Instruksi DJNZ
Decreament Jump If Not Zero (DJNZ) ini merupakan perintah untuk mengurangi nilai register tertentu dengan 1 dan lompat jika hasil pengurangannya belum nol. Contoh:
MOV R0,#80h Loop: ...
... DJNZ R0,Loop ...
R0 -1, jika belum 0 lompat ke loop, jika R0 = 0 maka program akan meneruskan ke perintah pada baris berikutnya.
3. Instruksi ACALL
Instruksi ini berfungsi untuk memanggil suatu rutin tertentu. Contoh: ...
ACALL TUNDA ... TUNDA:
... 4. Instruksi RET
Instruksi RETURN (RET) ini merupakan perintah untuk kembali ke rutin pemanggil setelah instruksi ACALL dilaksanakan. Contoh:
ACALL TUNDA ... TUNDA:
... RET
29
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu. Contoh: Loop:
... ...
JMP Loop 6. Instruksi JB (Jump if bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika high (1). Contoh:
Loop:
JB P1.0,Loop
... 7. Instruksi JNB (Jump if Not bit)
Instruksi ini merupakan perintah untuk lompat ke alamat tertentu, jika pin yang dimaksud berlogika Low (0). Contoh:
Loop:
JNB P1.0,Loop
...
8. Instruksi CJNE(Compare Jump If Not Equal)
Instruksi ini berfungsi untuk membandingkan nilai dalam suatu register dengan suatu nilai tertentu. Contoh:
Loop:
... CJNE R0,#20h,Loop
...
Jika nilai R0 tidak sama dengan 20h, maka program akan lompat ke rutin Loop. Jika nilai R0 sama dengan 20h,maka program akan melanjutkan instruksi selanjutnya.
9. Instruksi DEC (Decreament)
Instruksi ini merupakan perintah untuk mengurangi nilai register yang dimaksud dengan 1. Contoh:
MOV R0,#20h R0 = 20h ...
DEC R0 R0 = R0 – 1 ...
Instruksi ini merupakan perintah untuk menambahkan nilai register yang dimaksud dengan 1. Contoh:
[image:41.595.170.458.357.575.2]MOV R0,#20h R0 = 20h ...
INC R0 R0 = R0 + 1 ...
11.Dan lain sebagainya.
3.2.2 Software 8051 Editor, Assembler, Simulator (IDE)
Instruksi-instruksi yang merupakan bahasa assembly tersebut dituliskan pada sebuah editor, yaitu 8051 Editor, Assembler, Simulator (IDE). Tampilannya seperti ini:
Gambar 3.7 8051 Editor, Assembler, Simulator (IDE)
31
Software 8051 IDE ini berfungsi untuk merubah program yang kita tuliskan ke dalam bilangan heksadesimal, proses perubahan ini terjadi pada saat peng-compile-an. Bilangan heksadesimal inilah yang akan dikirimkan ke mikrokontroler.
3.2.3 Software Downloader
[image:42.595.223.405.363.463.2]Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroler digunakan software ISP- Flash Programmer 3.0a yang dapat didownload dari internet. Tampilannya seperti gambar ini:
Gambar 3.8 ISP- Flash Programmer 3.a
Cara menggunakannya adalah dengan meng-klik Open File untuk mengambil file heksadesimal dari hasil kompilasi 8051IDE, kemudian klik Write untuk mengisikan hasil kompilasi tersebut ke mikrokontroler.
3.2.4 Perancangan Program
mulai Sensor kanan depan Sensor kiri depan Sensor kanan samping Sensor kiri samping
Sensor kiri & sensor kanan depan Belok kiri sedikit Belok kanan sedikit Belok kiri sedikit Belok kanan sedikit Belok kanan 90 derajat Maju terus
tidak tidak tidak tidak
ya ya ya ya ya
Program diawali dengan mulai, kemudian program akan mengecek semua status sensor. Apabila tidak ada input data dari sensor maka keadaan robot bebas halangan, program memerintahkan robot untuk terus maju.
Jika sensor kanan depan mendapat data, maka sensor tersebut akan mengirimkan sinyal ke mikrokontroler dengan adanya input data tersebut maka program akan memerintahkan robot untuk berbelok ke arah kiri sedikit. Perlakuan serupa juga dilakukan apabila sensor kanan samping mendapat data.
Jika sensor kiri depan mendapat data, maka sensor tersebut akan mengirimkan sinyal ke mikrokontroler dengan adanya input data tersebut maka program akan memerintahkan robot untuk berbelok ke arah kanan sedikit. Perlakuan serupa juga dilakukan apabila sensor kiri samping mendapat data.
33
Berikut program untuk menjalankan robot:
motor_kanan1 bit p0.0 motor_kanan2 bit p0.1
motor_kiri1 bit p0.2
motor_kiri2 bit p0.3
samp_kanan bit p2.0
depan_kanan bit p2.1
depan_kiri bit p2.2
samp_kiri bit p2.3
depan_kanan_kiri eQu 0f9h
start:
jb depan_kanan,cek_sisi_kanan
call putar_kiri
jmp cek_sisi_kanan
cek_sisi_kanan:
jb samp_kanan,cek_sensor_kiri
call putar_kiri
jmp cek_sensor_kiri
cek_sensor_kiri:
jb depan_kiri,cek_sisi_kiri
call putar_kanan
jmp cek_sisi_kiri
cek_sisi_kiri:
jnb samp_kiri,cek_kedua_sensor_depan
call putar_kanan
jmp maju
cek_kedua_sensor_depan:
Mov p2,#0f9h
Mov a,p2 Cjne a,#0f9h,maju Call mundur Call putar_kiri Jmp maju putar_kanan:
mov r6,#3
kn:
mov r5,#15
routine_belok_kanan:
call belok_kanan
djnz r5,routine_belok_kanan
djnz r6,kn
jmp maju
belok_kanan:
clr motor_kanan1
setb motor_kanan2
clr motor_kiri1
setb motor_kiri2
mov r7,#80
ret
putar_kiri:
mov r6,#3
kr:
mov r5,#15
routine_belok_kiri:
call belok_kiri
djnz r5,routine_belok_kiri
djnz r6,kr
jmp maju
ret belok_kiri:
setb motor_kanan1
clr motor_kanan2
setb motor_kiri1
clr motor_kiri2
mov r7,#80
djnz r7,$
ret
Mundur:
Clr Motor_kanan1
Setb Motor_kanan2
Setb Motor_kiri1
Clr Motor_kiri2
Mov r7,#120
Djnz r7,$
ret
maju_terus:
setb motor_kanan1
clr motor_kanan2
clr motor_kiri1
setb motor_kiri2
mov r7,#70
djnz r7,$
clr motor_kanan1
clr motor_kanan2
clr motor_kiri1
clr motor_kiri2
mov r7,#180
djnz r7,$
BAB 4
PENGUJIAN RANGKAIAN
4.1 Pengujian Rangkaian Catu Daya
Pengujian pada rangkaian catu daya ini dilakukan dengan mengukur tegangan
[image:46.595.219.447.378.499.2]keluaran dari rangkaian ini dengan menggunakan voltmeter digital.
Gambar 4.1 Rangkaian catu daya
Dari hasil pengujian pada saat baterai penuh, maka didapatkan tegangan
keluaran pertama sebesar 5,0 volt dan tegangan keluaran yang kedua sebesar 6,2 volt.
Pada saat baterai lemah, maka didapatkan tegangan keluaran pertama sebesar 4.6 volt
dan tegangan keluaran yang kedua sebesar 5,9 volt walaupun tegangan keluaran
pertama tidak tepat 5 volt, dan tegangan keluaran kedua tidak tepat 6 volt, robot tetap
bekerja namun jalannya semakin lambat. Hal ini disebabkan karena kurangnya
tegangan yang dibutuhkan untuk memutar motor. Dengan demikian rangkaian ini
4.2 Pengujian Rangkaian Mikrokontroler AT89S51
Untuk mengetahui apakah rangkaian mikrokontroler AT89S51 telah bekerja
dengan baik, maka dilakukan pengujian. Pengujian ini dilakukan dengan memberikan
program sederhana pada mikrokontroler AT89S51. Programnya adalah sebagai
berikut:
Loop:
Setb P0.0
Acall tunda
Clr P0.0
Acall tunda
Sjmp Loop
Tunda:
Mov r7,#255
Tnd: Mov r6,#255
Djnz r6,$
Djnz r7,tnd
Ret
Program di atas bertujuan untuk menghidupkan LED yang terhubung ke P0.0
selama ± 0,13 detik kemudian mematikannya selama ± 0,13 detik secara terus
menerus. Perintah Setb P0.0 akan menjadikan P0.0 berlogika high yang menyebabkan
LED menyala. Acall tunda akan menyebabkan LED ini hidup selama beberapa saat.
Perintah Clr P0.0 akan menjadikan P0.0 berlogika low yang menyebabkan LED akan
mati. Perintah Acall tunda akan menyebabkan LED ini mati selama beberapa saat.
Perintah Sjmp Loop akan menjadikan program tersebut berulang, sehingga akan
tampak LED tersebut tampak berkedip.
Lamanya waktu tunda dapat dihitung dengan perhitungan sebagai berikut :
Kristal yang digunakan adalah kristal 12 MHz, sehingga 1 siklus mesin
membutuhkan waktu = 12 1
37
Mnemonic Siklus Waktu Eksekusi
MOV Rn,#data 2 2 x 1 μd = 2 μd
DJNZ 2 2 x 1 μd = 2 μd
RET 1 1 x 1 μd = 1 μd
Tunda:
mov r7,#255 Tnd: mov r6,#255 2
djnz r6,$ 255 x 2 = 510 x 255 = 130.054
djnz r7,loop3
2
djnz r2,loop8
ret
Jadi waktu yang dibutuhkan untuk mengerjakan program di atas adalah 130.054
μdetik atau 0,130054 detik dan dapat dibulatkan menjadi 0,13 detik.
Jika program tersebut diisikan ke mikrokontroler AT89S51, kemudian
mikrokontroler dapat berjalan sesuai dengan program yang diisikan, maka rangkaian
minimum mikrokontroler AT89S51 telah bekerja dengan baik.
4.3 Pengujian Rangkaian Pemancar Infra Merah
Untuk mendeteksi adanya halangan/dinding di depan atau disamping robot,
maka robot dilengkapi dengan 4 buah sensor dinding/halangan. Sensor ini terdiri dari
2 buah LED infra merah dan sebuah fotodioda. Digunakan dua buah pemancar infra
merah yang dirangkai secara paralel agar pantulan yang diterima oleh penerima
Pancaran infra merah
Pantulan infra merah
[image:49.595.140.518.116.329.2]dinding
Gambar 4.2 Rangkaian Pemancar dan penerima infra merah
Pada rangkaian di atas digunakan 2 buah LED infra merah yang diparalelkan,
dengan demikian maka intensitas yang dipancarkan oleh infra merah semakin kuat,
karena merupakan gabungan dari 2 buah LED infra merah. Resistor yang digunakan
adalah 100 ohm sehingga arus yang mengalir pada masing-masing LED infra merah
adalah sebesar:
5
0, 05 50
100 V
i A atau mA
R
= = =
Dengan besarnya arus yang mengalir ke LED infra merah, maka intensitas pancaran
infra merah akan semakin kuat, yang menyebabkan jarak pantulannya akan semakin
jauh.
Pantulan dari sinar infra merah akan diterima oleh fotodioda, kemudian akan
diolah oleh rangkaian penerima agar menghasilkan data biner, dimana jika fotodioda
39
mengeluarkan logika low (0), namun jika fotodioda tidak menerima pantulan sinar
infra merah, maka output dari rangkaian penerima akan mengeluarkan logika high (1).
Fotodioda memiliki hambatan sekitar 15 s/d 20 Mohm jika tidak terkena sinar
infra merah, dan hambatannya akan berubah menjadi sekitar 80 s/d 300 Kohm jika
terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya.
Semakin besar intensitasnya, maka hambatannya semakin kecil.
Pada rangkaian di atas, output dari fotodioda diumpankan ke basis dari
transistor tipe NPN C945, ini berarti untuk membuat transistor tersebut aktif maka
tegangan yang keluar dari fotodioda harus lebih besar dari 0,7 volt. Syarat ini akan
terpenuhi jika fotodioda mendapatkan sinar infra merah. Analisanya sebagai berikut:
Jika tidak ada sinar infra merah yang mengenai fotodioda, maka hambatan pada
fotodioda 15 Mohm, sehingga:
2 330.000
5 0,107 1 2 15.000.000 330.000
R
Vo xVcc x Volt
R R
= = =
+ +
Vout akan diumpankan ke basis dari transistor C945, karena tegangannya hanya 0,107
Volt maka transistor tidak aktif.
Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda
300 Kohm, sehingga:
2 330.000
5 2, 619 1 2 300.000 330.000
R
Vo xVcc x Volt
R R
= = =
+ +
Vout akan diumpankan ke basis dari transistor C945, karena tegangannya lebih besar
dari 0,7 volt yaitu 2,619 Volt maka transistor akan aktif, yang menyebabkan
kolektornya terhubung ke emiter, sehingga kolektor mendapat tegangan 5 volt dari
sehingga jika transistor ini aktif, maka kolektor akan mendapatkan tegangan 0 volt
dari ground. Tegangan 0 volt inilah yang merupakan sinyal low (0) yang diumpankan
ke mikrokontroler AT89S51, sehingga mikrokontroler dapat mengetahui bahwa
sensor ini mengirimkan sinyal, yang berarti bahwa sensor ini telah berada dekat
dengan penghalang atau dinding.
LED berfungsi sebagai indikator bahwa sensor ini menerima pantulan sinar
infra merah dari pemancar. LED ini akan menyala jika sensor menerima sinar infra
merah, dan akan mati jika sensor tidak menerima sinar infra merah.
Untuk mendeteksi adanya sinyal yang dikirimkan oleh sensor, maka
mikrokontroler harus diprogram untuk untuk dapat mengecek sensor mana yang
mengirimkan sinyal. Sebagai contoh sensor yang berada di depan kanan dihubungkan
ke P2.1 mikrokontroler AT89S51. Program untuk mendeteksi pengiriman sinyal dari
sensor ini adalah:
Sensor_Depan_Kanan:
JB P2.1, Sensor_Depan_Kiri
Acall Putar_Kiri_Sedikit
Sjmp Sensor_Depan_Kanan
Program di atas akan melihat kondisi P2.1 yang dihubungkan ke sensor depan
kanan, dengan menggunakan perintah JB (jump if bit), jika kondisi P2.1 bit (high)
maka program akan lompat ke rutin Sensor_Depan_Kiri untuk mengecek apakah
sensor depan kiri mengirim sinyal atau tidak. Namun jika kondisi P2.1 not bit (low),
maka program akan mengerjakan perintah Acall Putar_Kiri_Sedikit yaitu memanggil
rutin Putar_Kiri_Sedikit untuk menggeser posisi robot agar tidak menabrak dinding.
Selanjutnya program akan kembali ke rutin awal untuk kembali mengecek sensor.
41
4. 4 Pengujian Rangkaian Jembatan H
Untuk menghindari dinding, maka robot harus dapat mengendalikan perputaran
rodanya. Robot menggunakan 2 buah motor DC 6 volt untuk menggerakkan rodanya,
dimana 1 motor untuk menggerakkan roda sebelah kanan dan 1 motor lagi untuk
menggerakkan roda sebelah kiri. Untuk mengendalikan ke-2 motor ini digunakan
[image:52.595.139.514.276.672.2]rangkaian jembatan H, seperti gambar ini:
Pada rangkaian di atas, jika P0.0 diset high yang berarti P0.0 mendapat
tegangan 5 volt, maka kedua transistor tipe NPN C945 yang disebelah kiri akan aktif.
Hal ini akan membuat kolektor dari kedua transistor C945 itu akan mendapat tegangan
0 volt dari ground. Kolektor dari transistor C945 yang berada di sebelah kiri atas
diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga basis dari transistor
TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktif
(transistor tipe PNP akan aktif jika tegangan pada basis lebih kecil dari 4,34 volt).
Aktifnya transistor PNP TIP 127 ini akan mengakibatkan kolektornya terhubung ke
emiter sehingga kolektor mendapatkan tegangan 5 volt dari Vcc.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah
diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor
TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktif
(transistor tipe NPN akan aktif jika tegangan pada basis lebih besar dari 0,7 volt).
Karena transistor TIP 122 ini tidak aktif, maka kolektornya tidak terhubung ke emiter,
sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang
mendapatkan tegangan 5 volt dari Vcc, maka kolektor dari TIP 122 juga
mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kiri
mendapatkan tegangan 5 volt (polaritas positif).
Agar motor dapat berputar ke satu arah maka kaki sebelah kanan motor harus
mendapatkan tegangan 0 volt (polaritas negatif). Hal ini diperoleh dengan
memberikan logika low (0) pada P0.1 mikrokontroler AT89S51.
43
Pada rangkaian di atas, jika P0.1 diset low yang berarti P0.1 mendapat
tegangan 0 volt, maka kedua transistor tipe NPN C945 yang disebelah kanan tidak
akan aktif. Hal ini akan membuat kolektor dari kedua transistor C945 itu akan
mendapat tegangan 5 volt dari Vcc. Kolektor dari transistor C945 yang berada di
sebelah kanan atas diumpankan ke basis dari transistor tipe PNP TIP 127 sehingga
basis dari transistor TIP 127 mendapatkan tegangan 5 volt yang menyebabkan
transistor ini tidak aktif Karena transistor PNP TIP 127 tidak aktif maka kolektornya
tidak terhubung ke emiter sehingga kolektor tidak mendapatkan tegangan 5 volt dari
Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di
bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah kiri bawah
diumpankan ke basis dari transistor tipe NPN TIP 122 sehingga basis dari transistor
TIP 122 mendapatkan tegangan 5 volt yang menyebabkan transistor ini menjadi aktif.
Karena transistor TIP 122 ini menjadi aktif, menyebabkan kolektornya terhubung ke
emiter, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan teganagan 0 volt dari ground
dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga
mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kanan
mendapatkan tegangan 0 volt (polaritas negatif). Hal ini akan menyebabkan motor
akan berputar ke satu arah tertentu.Sedangkan untuk memutar motor kearah
sebaliknya, maka logika yang diberikan ke P0.0 adalah low (0) dan logika yang
Program yang diisikan ke mikrokontroler AT89S51 untuk memutar motor ke
satu arah tertentu adalah:
Setb P0.0 Clr P0.1
Perintah Setb P0.0 akan memberikan logika high ke P0.0 dan perintah Clr P0.1 akan
memberikan logika low ke P0.1. Untuk membuat motor berputar kearah sebaliknya
adalah:
Clr P0.0 Setb P0.1
Perintah Clr P0.0 akan memberikan logika low ke P0.0 dan perintah Setb P0.1 akan
memberikan logika high ke P0.1. Dengan demikian arah perputaran motor sudah
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Untuk memutar motor dc nilai logika pada inputnya harus diberikan secara bergantian.
2. Robot diprogram untuk menghindari adanya dinding atau penghalang, ketika sensor mendeteksi adanya dinding maka robot diperintahkan untuk berbelok ke kanan atau ke kiri untuk menghindari dinding.
3. Untuk menghindari adanya dinding maka robot dilengkapi dengan 4 sensor infra merah.
4. Fotodioda peka terhadap sinar infra merah, sehingga sensor akan terganggu jika terkena sinar matahari secara langsung.
5.2 Saran
1. Agar sistem atau rangkaian yang digunakan tidak terganggu, sebaiknya alat ini dikemas dalam bentuk yang lebih aman dan terlindungi sehingga penggunaannya lebih efektif.