Informasi Dokumen
- Penulis:
- Wiranto
- Pengajar:
- Ir. Bregas Budianto, Ass. Dpl
- Sekolah: Institut Pertanian Bogor
- Mata Pelajaran: Meteorologi
- Topik: Pengembangan Sensor Ketinggian Air (Water Level) Dengan Menggunakan Pendekatan Elektroda Resistansi
- Tipe: tugas akhir
- Tahun: 2008
- Kota: Bogor
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini menjelaskan latar belakang penelitian mengenai sensor ketinggian air dan pentingnya pengukuran akurat terhadap debit aliran sungai. Penelitian ini berfokus pada pengembangan alat ukur yang sederhana namun efektif, yaitu AWLR (Automatic Water Level Recording) menggunakan pendekatan elektroda resistansi. Penekanan pada pentingnya alat ini adalah untuk memberikan solusi terhadap masalah banjir dan kekeringan yang sering terjadi akibat perubahan lingkungan. Dengan menggunakan teknologi yang lebih terjangkau, diharapkan penelitian ini dapat meningkatkan pemahaman mahasiswa tentang pengukuran hidrologi dan aplikasinya dalam mitigasi bencana.
1.1 Latar Belakang
Latar belakang membahas permasalahan yang dihadapi akibat perubahan fisik lingkungan, terutama yang berhubungan dengan banjir. Penjelasan mengenai AWLR dan kekurangan alat ukur yang ada saat ini menjadi fokus utama. Hal ini memberikan konteks bagi mahasiswa untuk memahami pentingnya pengembangan alat ukur yang lebih efisien dan terjangkau untuk mengatasi masalah hidrologi.
1.2 Tujuan Penelitian
Tujuan penelitian ini adalah untuk mengembangkan alat ukur tinggi muka air dengan menggunakan kawat resistansi. Penekanan pada tujuan ini memberikan mahasiswa wawasan tentang aplikasi praktis dari teori yang dipelajari dalam bidang meteorologi dan hidrologi, serta pentingnya inovasi dalam teknologi pengukuran.
II. TINJAUAN PUSTAKA
Bagian ini menguraikan berbagai konsep dan teori yang relevan dengan penelitian. Tinjauan pustaka mencakup pengertian aliran sungai, hidrograf, serta berbagai metode dan alat pengukur tinggi muka air yang ada. Ini memberikan mahasiswa dasar pengetahuan yang diperlukan untuk memahami konteks penelitian dan teknologi yang digunakan.
2.1 Aliran Sungai
Aliran sungai yang dipengaruhi oleh distribusi presipitasi dijelaskan melalui grafik hidrograf. Mahasiswa belajar bagaimana aliran sungai berfungsi dan bagaimana pengukuran debit sungai penting dalam studi hidrologi.
2.2 Hidrograf
Hidrograf sebagai diagram variasi debit sungai memberikan pemahaman kepada mahasiswa tentang bagaimana data hidrologi dianalisis dan digunakan untuk prediksi banjir. Ini adalah bagian penting dari pendidikan hidrologi yang membantu mahasiswa memahami respons DAS terhadap curah hujan.
2.3 Pengukuran Tinggi Muka Air
Penjelasan mengenai tinggi muka air dan pentingnya pengukuran yang akurat. Mahasiswa diajarkan tentang metode pengukuran yang berbeda dan bagaimana memilih alat yang sesuai untuk aplikasi tertentu.
2.4 Instalasi AWLR
Aspek teknis dari pemasangan AWLR memberikan wawasan praktis kepada mahasiswa tentang bagaimana alat ini diimplementasikan di lapangan. Ini mencakup pertimbangan lokasi dan ketelitian pengukuran.
2.5 Sumur Peredam
Deskripsi mengenai penggunaan sumur peredam dalam pengukuran tinggi muka air. Ini menunjukkan kepada mahasiswa bagaimana desain alat dapat mempengaruhi hasil pengukuran.
2.6 Alat Pengukur Tinggi Muka Air
Berbagai jenis alat ukur tinggi muka air, baik manual maupun otomatis, dibahas untuk memberikan mahasiswa pemahaman yang komprehensif tentang pilihan yang tersedia dalam teknologi pengukuran.
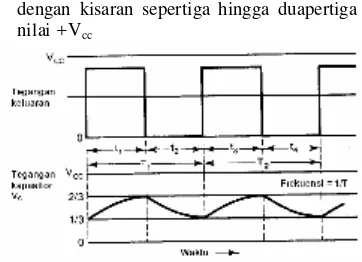
2.7 Perangkat Elektronik
Bagian ini menjelaskan tentang komponen elektronik yang digunakan dalam sensor, seperti pembangkit pulsa dan hambatan listrik. Mahasiswa belajar tentang dasar-dasar elektronik yang mendukung pengembangan sensor.
III. METODOLOGI
Metodologi penelitian meliputi langkah-langkah yang diambil untuk mengembangkan sensor, mulai dari studi literatur hingga pengujian sensor. Ini memberikan mahasiswa pemahaman tentang proses penelitian yang sistematis dan pentingnya setiap tahap dalam pengembangan teknologi.
3.1 Waktu dan Tempat Penelitian
Menjelaskan lokasi dan waktu penelitian, memberikan konteks praktis bagi mahasiswa tentang bagaimana penelitian dilakukan di lapangan.
3.2 Bahan dan Alat
Daftar bahan dan alat yang digunakan dalam penelitian memberi mahasiswa wawasan tentang sumber daya yang diperlukan untuk proyek penelitian.
3.3 Metode Penelitian
Menguraikan metode penelitian yang digunakan, termasuk studi literatur, pemilihan jenis sensor, dan simulasi. Ini membantu mahasiswa memahami pendekatan yang digunakan dalam penelitian ilmiah.
IV. HASIL DAN PEMBAHASAN
Bagian ini menyajikan hasil penelitian dan analisis yang dilakukan. Ini sangat penting dalam konteks pendidikan karena memberikan mahasiswa contoh nyata tentang bagaimana data dikumpulkan, dianalisis, dan diinterpretasikan.
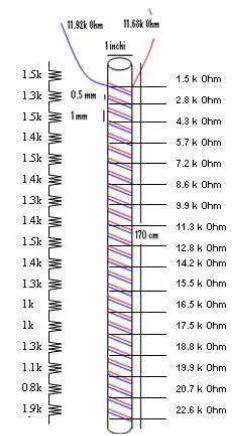
4.1 Sensor Resistance Wire
Membahas sifat fisik sensor dan bagaimana resistansi tinggi dapat memberikan informasi yang akurat mengenai tinggi muka air. Ini menunjukkan aplikasi teori fisika dalam konteks praktis.
4.2 Prinsip Kerja Sensor
Menjelaskan prinsip kerja sensor dan bagaimana perubahan ketinggian air mempengaruhi resistansi. Ini memberikan mahasiswa pemahaman yang mendalam tentang mekanisme di balik alat yang mereka pelajari.
4.3 Ketahanan Korosi
Uji ketahanan korosi pada sensor memberikan wawasan tentang masalah praktis yang dihadapi dalam pengembangan alat. Ini menekankan pentingnya mempertimbangkan faktor lingkungan dalam desain alat.
4.4 Simulasi Sensor
Simulasi pembuatan sensor menunjukkan bagaimana teori diterapkan dalam praktik. Ini memberikan mahasiswa pengalaman langsung dalam proses desain dan pengembangan.
4.5 Pembuatan Sensor
Proses pembuatan sensor memberikan wawasan praktis kepada mahasiswa tentang tantangan yang dihadapi dalam pengembangan alat. Ini juga menunjukkan pentingnya ketelitian dan perencanaan dalam proyek teknik.
V. KESIMPULAN DAN SARAN
Bagian ini menyimpulkan temuan penelitian dan memberikan rekomendasi untuk penelitian lebih lanjut. Ini penting untuk mengajarkan mahasiswa bagaimana menarik kesimpulan dari data yang diperoleh dan bagaimana merencanakan penelitian mendatang berdasarkan hasil yang ada.