1
1.
PENDAHULUAN
1.1 Latar Belakang
Pengamatan secara langsung terhadap satwa liar sangat penting dalam metode untuk mempelajari beberapa aspek kehidupan seperti perilaku hewan tersebut atau pergerakannya, dalam melakukan pengamatan dilapangan sangat sulit dilakukan terutama untuk jenis hewan-hewan yang peka terhadap manusia, selain itu kawasan hutan mangrove sebagai wilayah penelitian yang sangat lebat dengan perakaran yang tinggi dan rapat sehingga membuat peneliti akan sulit untuk mengamati dan akan mengurangi ketelitian dan ketepatan hasil studi.
Kendala-kendala dalam pengamatan dilapangan ini dapat diperkecil dengan menggunakan metode pengukuran jarak jauh. Pengukuran jarak jauh ini disebut dengan telemetri yaitu sebuah teknologi yang melakukan pengukuran jarak jauh dan melaporkan informasi kepada perancang atau operator sistem. Sistem pengukuran jarak jauh ini dapat memakai gelombang radio atau RF untuk pengiriman data. Gelombang radio yang digunakan hanya sebagai sistem pemancar dan penerima dari data, data yang dikirim dapat berupa perekaman gambar, waktu, tanggal, maupun data-data penting yang terekam dari pemancar.
kabel ini akan dipasangkan diatas sarang dari burung dengan ketinggian diatas sarang yaitu 30 cm.
Low Altitude Observation atau observasi pada ketinggian yang rendah sudah banyak dilakukan, salah satunya Low Altitude Satelite observation yang diakukan oleh Lockwood et al (2001) penelitian ini dilakukan untuk mengamati pergerakan poleward oleh sistem satelit yang melewati Ionospher. Sedangkan, penelitian yang dilakukan Nemec et al (2008) melakukan penelitian tentang pengukuran intensitas gempa bumi dengan ketinggian satelit yang rendah yaitu sekitar 700 km.
Donoghue (2009) menyatakan bahwa sudah banyak peneliti yang melakukan penelitian Low Altitude Observation ini seperti yang dilakukan oleh Dugdale (2007) dengan menggunakan smartplane untuk melihat zona pasang surut, selain itu Lejot et al (2006) menggunakan Pixy Drone untuk memetakan batimetri. Low Altitude Observation ini memerlukan kamera sebagai
penggambaran lokasi dan wilayah, untuk pengamatan diperlukan kamera yang berbeda-beda seperti yang dilakukan oleh Wundram dan Luffler (2008) untuk monitoring vegetasi menggunakan kamera berjenis Nixon Coolpix (4MP) RGB, sedangkan Dugdale (2007) untuk pengamatan zona pasang surut menggunakan dua kamera dengan jenis Canon IXUS 60 (6MP) RGB dan Canon IXUS (5MP) NIR.
memiliki berat hingga mencapai 15 kg, alat ini diciptakan oleh Gareth Brown pada tahun 1984.
Kepiting bakau merupakan salah satu kepiting yang habitatnya berada diwilayah hutan mangrove. Tingkah laku dari kepiting ini seringkali sulit diamati sebab kepiting ini sangat peka terhadap keberadaan manusia. Sedangkan, kepiting ini memiliki peranan yang sangat penting dalam ekosistem hutan mangrove. Kepiting ini memiliki peranan yang sangat penting, salah satu peranan kepiting bakau ini yaitu mengurai daun mangrove yang jatuh sehingga penguraian lebih cepat. Penguraian ini dilakukan oleh kepiting dengan memakan dedaunan mangrove, selain itu lubang-lubang tempat tinggal kepiting ini dapat mengurangi kadar racun tanah mangrove yang terkenal anoksik.
1.2 Tujuan
2. TINJAUAN PUSTAKA
2.1 Telemetri Radio
Telemetri merupakan sistem untuk pengumpulan data yang dilakukan disuatu tempat terpencil atau sukar dan mengerjakannya sehingga data tersebut dapat dievaluasi, sistem ini menggunakan sistem komunikasi (Carden, et al, 2002). Menurut Rochani (2007) Telemetri merupakan suatu cara pengukuran data jarak jauh yang menggunakan sarana telekomunikasi dimana pada penelitiannya menggunakan sistem telemetri sebagai early warning sistem. Sistem telemetri dilihat dari sistem pemancaran dibagi menjadi dua yaitu: sistem telemetri melalui kabel, biasanya pengiriman melalui kabel atau kawat penghantar dimana
kecepatannya mendekati kecepatan cahaya (Prayitno, 1997 in Utari, 2010), kedua yaitu sistem telemetri radio adalah suatu proses yang digunakan untuk mengukur atau mencatat suatu besaran fisik pada suatu lokasi yang letaknya jauh dari pusat pengolahan hasil pengukuran (Sulistiyanti, 2008).
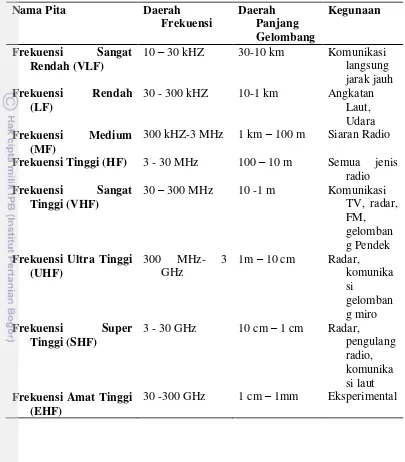
Sistem telemetri dengan menggunakan frekuensi radio memiliki beberapa keunggulan yaitu memiliki probabilitas yang kecil, peralatan pemancaran yang ringan dan jangkauan pemancaran yang jauh (Sulistiyanti, 2008). Gelombang radio yang dipancarkan biasanya memmiliki frekuensi sangat lebar dari sekitar 10 kHZ sampai dengan 300 GHz dalam spektrum elektromagnetik. Gelombang radio digolongkan dalam daerah-daerah yang lebih kecil, tabel 1 merupakan
Tabel 1. Spektrum radio (sumber: Chattopadhyay, 1989).
Nama Pita Daerah
Frekuensi
Daerah Panjang Gelombang
Kegunaan
Frekuensi Sangat
Rendah (VLF)
10 – 30 kHZ 30-10 km Komunikasi langsung jarak jauh
Frekuensi Rendah
(LF)
30 - 300 kHZ 10-1 km Angkatan Laut, Udara
Frekuensi Medium
(MF)
300 kHZ-3 MHz 1 km – 100 m Siaran Radio
Frekuensi Tinggi (HF) 3 - 30 MHz 100 – 10 m Semua jenis radio
Frekuensi Sangat
Tinggi (VHF)
30 – 300 MHz 10 -1 m Komunikasi TV, radar, FM, gelomban g Pendek
Frekuensi Ultra Tinggi (UHF)
300 MHz- 3 GHz
1m – 10 cm Radar, komunika si
gelomban g miro
Frekuensi Super
Tinggi (SHF)
3 - 30 GHz 10 cm – 1 cm Radar,
pengulang radio, komunika si laut
Frekuensi Amat Tinggi (EHF)
30 -300 GHz 1 cm – 1mm Eksperimental
2.2 GPS (Global Positioning System)
yaitu 24 satelit, 6 satelit mengelilingi bumi dengan sebaran yang telah diatur. Satelit pada GPS memiliki rata-rata ketinggian 20.200 km diatas permukaan bumi, satelit ini biasanya memiliki berat 8000 kg bergerak dengan kecepatan sekitar 4 km/ detik dan memiliki periode 11 jam 58 menit (Longsdom, 1995).
Satelit GPS memancarkan sinyal untuk memberitahukan posisi satelit GPS yang bersangkutan serta jaraknya dari pengamat lengkap dengan informasi
waktunya, sinyal GPS juga digunakan untuk menginformasikan kondisi satelit pada pengamat (Widodo, 2009).
Satelit GPS beroperasi dengan menggunakan sistem waktunya sendiri, sistem waktu ini biasanya didefinisikan jam-jam atom yang berada disetiap satelit GPS, sistem waktu GPS adalah sistem waktu berskala kontinyu yang
didefinisikan oleh jam atom utama yang berada di Master Control Station (MCS) GPS di Colorado Springs. Sistem waktu GPS ini bereferensi ke sistem UTC (Universal Time Coordinated) yang dikelola oleh USNO (United States Naval Observatory), dan keduanya mempunyai hubungan yang terdefinisi secara teliti sampai tingkat 1 milidetik (Widodo, 2009).
2.3 Motor DC
Motor arus searah digunakan dimana kontrol torsi dan kecepatan dengan rentang yang lebar diperlukan untuk memenuhi kebutuhan aplikasi. Sifat dari motor DC bila tenaga mekanik yang diperlukan cukup kecil maka motor DC yang digunakan cukup kecil pula. Motor DC untuk tenaga kecil pada umumnya
Motor DC yang berukuran kecil biasanya dipakai sebagai mekanisme penggerak didalam banyak proyek mekanik. Motor-motor berukuran kecil pada umumnya bekerja dengan kecepatan beberapa ribu putaran permenit, dengan pemasangan roda-roda gigi dapat mengurangi laju putaran dan meningkatkan gaya putaran (Bishop, 2004).
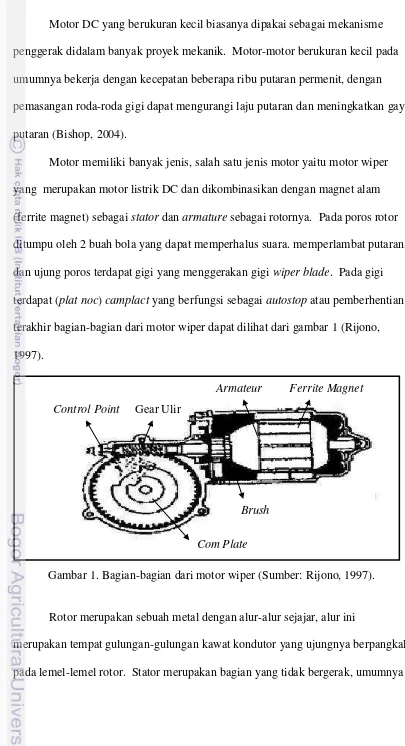
Motor memiliki banyak jenis, salah satu jenis motor yaitu motor wiper yang merupakan motor listrik DC dan dikombinasikan dengan magnet alam (ferrite magnet) sebagai stator dan armature sebagai rotornya. Pada poros rotor ditumpu oleh 2 buah bola yang dapat memperhalus suara. memperlambat putaran, dan ujung poros terdapat gigi yang menggerakan gigi wiper blade. Pada gigi terdapat (plat noc) camplact yang berfungsi sebagai autostop atau pemberhentian terakhir bagian-bagian dari motor wiper dapat dilihat dari gambar 1 (Rijono, 1997).
Gambar 1. Bagian-bagian dari motor wiper (Sumber: Rijono, 1997).
Rotor merupakan sebuah metal dengan alur-alur sejajar, alur ini
merupakan tempat gulungan-gulungan kawat kondutor yang ujungnya berpangkal pada lemel-lemel rotor. Stator merupakan bagian yang tidak bergerak, umumnya
Armateur Ferrite Magnet
Gear Ulir
Control Point
Brush
kutub dari magnet stator biasanya berhadapan dengan rotor yang dipisahkan hanya dengan kain. Sedangkan, amateur merupakan bagian yang tersusun dari celah armature core , armature commulator, dan armature coil yang bertujuan untuk menghasilkan torsi (Hidayat, 2007).
2.4 Kamera CCTV
CCTV adalah alat perekaman yang menggunakan satu atau lebih kamera video dan menghasilkan data video atau audio. Sistem kerja kamera CCTV yaitu mengirimkan sinyal secara tertutup melalui wireless maupun kabel. Kabel yang biasa digunakan untuk CCTV biasanya yaitu kabel coaksial. Kegunaan dari CCTV biasanya yaitu mengawasi sebuah tempat yang berkaitan dengan masalah keamaan. Jenis-jenis kamera CCTV yaitu jenis gambar, jenis kecepatan
pengambilan gambar, jenis pergerakan kamera, jenis penerimaan data, jenis fitur tambahan (Surjono, 1996).
Gambar 2. Kamera CCTV (Sumber: Surjono, 1996)
yang terjadi dilokasi pengamatan dengan menggunakan laptop atau PC secara real time dari mana saja, dan dapat merekam seluruh kejadian secara 24 jam, atau dapat merekam ketika terjadi gerakan dari daerah yang terpantau.
Menurut Nugroho 2007, kamera CCTV ini dapat digunakan sebagai sensor posisi sebab kamera CCTV merupakan kamera yang secara real time dapat
3. METODOLOGI PENELITIAN
3.1. Waktu dan Lokasi Penelitian
Penelitian ini dilaksanakan pada bulan Oktober 2011 hingga April 2012, berupa pembuatan alat dan uji coba alat. Pembuatan dan pengujian alat
dilakukan di laboratorium Workshop Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor.
3.2. Alat dan Bahan
Pembuatan Low Altitude Observation Camera (LAOC) dapat dilihat pada tabel 2 meliputi alat yang digunakan untuk pembuatan alat.
Tabel 2. Daftar alat yang digunakan dalam pembuatan LAOC
No Nama Fungsi
1 Netbook dengan sistem operasi windows XP
Untuk melihat perekaman dari video dan GPS
2 Bor listrik dan standing
bor
Melubangi pipa dan akrilik
3 Gergaji Besi Memotong plat besi, akrilik dan pipa
4 Obeng Melepaskan dan memasang sekrup dan baut
5 Gerinda Mengasah sisi pada akrilik dan memotong sekrup
6 Solder Listrik Memanasi timah untuk menghubungkan kaki-kaki pada rangkaian elektronika
7 DMM (Digital
Multimeter)
Pengecekan tegangan yang dikeluarkan oleh alat serta tegangan dari aki
8 Mesin jigsaw Memotong dan membua pola pada akrilik
9 Tang Alat untuk mencengkram atau memegang komponen yang akan dilepas
10 Kikir Menghaluskan bagian alat
11 Project Board Tempat untuk membuat rangkaian elektronika dari alat
12 Alat tulis Menggambar rangkaian maupun menggambar pola pada akrilik dan pipa
13 Tali Long line Sebagai lintasan untuk pergerakan alat
Bahan yang digunakan dalam pembuatan Low Altitude Observation Camera (LAOC) ini dapat dilihat pada tabel 3.
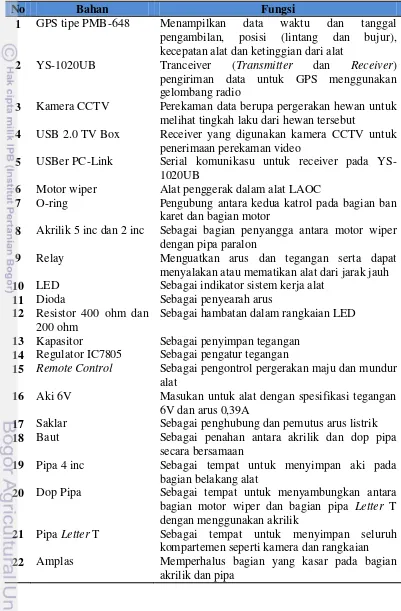
Tabel 3. Daftar bahan yang digunakan dalam pembuatan LAOC
No Bahan Fungsi
1 GPS tipe PMB-648 Menampilkan data waktu dan tanggal pengambilan, posisi (lintang dan bujur), kecepatan alat dan ketinggian dari alat
2 YS-1020UB Tranceiver (Transmitter dan Receiver) pengiriman data untuk GPS menggunakan gelombang radio
3 Kamera CCTV Perekaman data berupa pergerakan hewan untuk melihat tingkah laku dari hewan tersebut
4 USB 2.0 TV Box Receiver yang digunakan kamera CCTV untuk penerimaan perekaman video
5 USBer PC-Link Serial komunikasu untuk receiver pada YS-1020UB
6 Motor wiper Alat penggerak dalam alat LAOC
7 O-ring Pengubung antara kedua katrol pada bagian ban karet dan bagian motor
8 Akrilik 5 inc dan 2 inc Sebagai bagian penyangga antara motor wiper dengan pipa paralon
9 Relay Menguatkan arus dan tegangan serta dapat menyalakan atau mematikan alat dari jarak jauh
10 LED Sebagai indikator sistem kerja alat
11 Dioda Sebagai penyearah arus
12 Resistor 400 ohm dan 200 ohm
Sebagai hambatan dalam rangkaian LED
13 Kapasitor Sebagai penyimpan tegangan
14 Regulator IC7805 Sebagai pengatur tegangan
15 Remote Control Sebagai pengontrol pergerakan maju dan mundur alat
16 Aki 6V Masukan untuk alat dengan spesifikasi tegangan 6V dan arus 0,39A
17 Saklar Sebagai penghubung dan pemutus arus listrik
18 Baut Sebagai penahan antara akrilik dan dop pipa secara bersamaan
19 Pipa 4 inc Sebagai tempat untuk menyimpan aki pada bagian belakang alat
20 Dop Pipa Sebagai tempat untuk menyambungkan antara bagian motor wiper dan bagian pipa Letter T dengan menggunakan akrilik
21 Pipa Letter T Sebagai tempat untuk menyimpan seluruh kompartemen seperti kamera dan rangkaian
23 Lem power glue, lem korea dan lem silikon
Untuk merekatkan bagian pada akrilik dan ban karet serta membuat kedap air sehingga air tidak dapat masuk dan merusak rangkaian
24 Ban Karet Sebagai roda untuk lintasan dimana lintasan akan dijepit di kedua ban karet
25 Per Menjepit dua buah ban karet pada bagian atas dan bawah
26 Besi Sebagai sambungan antara ban karet bagian kanan dengan ban karet pada bagian kiei
27 Katrol Sebagai modifikasi untuk motor wiper dan ban karet sehingga dapat tersambung dengan O-ring
28 Spacer Sebagai penyangga dari tali agar tali tetap berada pada jalur alat
29 Kabel ciut Melindungi kabel dan menyatukan kabel agar kabel terlindungi dari air
30 Kabel USB Kabel untuk menyambungkan dari alat USBer PC-link dengan laptop atau PC
Program yang digunakan dalam pembuatan Low Altitude Observation Camera (LAOC) ini dapat dilihat pada tabel 4.
Tabel 4. Daftar program yang digunakan dalam pembuatan LAOC
No Program Fungsi
1 Google Sketch UP 7 Membuat sketsa alat secara 3D maupun 2D
2 Eagle 5.2.0 Membuat rangkaian dari alat LAOC
3 Terminal.exe Tampilan untuk keluaran GPS tipe PMB-648
4 USB2 TV Box Tampilan untuk perekaman video secara real time maupun direkam
3.3. Proses Pembuatan Low Altitude Observation Camera (LAOC)
Gambar 3. Tahapan pembuatan LAOC
3.4 Rancangan Alat
Rancangan alat didesain dengan menggunakan program Google Sketch Up 7. Bagian-bagian dari alat LAOC (Gambar 4) seperti kamera CCTV,
transmitter kamera, transmitter GPS, Remote control (RC), motor wiper, aki 6 Volt yang dirangkai secara seri sehingga menjadi 12 Volt, pipa 4 inc, pipa Letter
T, katrol, O-ring dan akrilik.
MULAI
Persiapan
Perumusan
Uji Coba
Selesai
Berhasil
Tidak Berhasil
Perancangan
Pembuatan sistem
mekanik
Pembuatan sistem
Elektronik
Penggunaan
Software
14
15
Rancang bangun ini memiliki dimensi panjang 540 mm dengan lebar 295 mm dan tinggi 160 mm, pada rangkaian alat LAOC ini menggunakan kamera CCTV yang dipergunakan untuk merekam video pergerakan hewan dan dikirim pada USB2 TV Box sehingga tampilan akan muncul pada layar PC atau laptop, selain kamera alat ini memiliki sistem GPS yang dipasang pada badan alat, GPS ini akan mengirimkan posisi lintang, bujur, waktu, tanggal, kecepatan dan ketinggian dari alat tersebut, alat ini juga memiliki sistem terkontrol untuk pergerakan maju-mundur dengan menggunakan remote control yang dirangkai dengan menggunakan relay, pada rangkaian digunakan juga saklar sehingga alat dengan mudah dihidupkan dan dimatikan.
Rangkaian alat ini menggunakan 4 buah aki dengan spesifikasi tegangan 6 Volt dengan arus 0,39 A, aki ini dirangkai secara seri, sebab motor wiper dan kamera CCTV menggunakan tegangan 12 Volt untuk dapat berfungsi, sedangkan GPS memerlukan tegangan 5 Volt untuk berfungsi. Penggunaan aki ini dibagi menjadi 2 yaitu: 12 Volt untuk Motor wiper, dan 12 Volt untuk kamera CCTV dan GPS.
3.5 Perancangan Mekanik, Elektronik dan Pembuatan Software
3.5.1 Perancangan Mekanik
pada bagian depan dari pipa leter T yang akan disambungkan dengan akrilik, akrilik ini berfungsi sebagai penghubung antara pipa dengan motor wiper. Motor wiper ditempatkan secara terpisah yaitu di bagian depan alat, ini dimaksudkan untuk menyeimbangkan alat antara bagian depan dan belakang, selain itu penggunaan motor wiper di depan untuk mempermudah jalan dari alat sehingga bagian belakang hanya untuk penyangga alat.
Motor wiper yang digunakan telah dimodifikasi dengan penambahan katrol pada bagian depan motor sedangkan pada bagian atas terdapat katrol yang telah dihubungkan dengan ban karet, ban karet ini berfungsi untuk menjalankan alat. Terdapat 4 buah ban karet yang digunakan dalam penelitian ini, Sisi kanan alat terdapat dua buah dan pada sisi kiri terdapat 2 buah, ban karet pada setiap sisi akan diletakan berhadapan atas dan bawah ini berfungsi untuk menjepit lintasan, ban karet disisi kanan dan kiri bagian akrilik tersambung dengan besi yang dapat mempermudah pergerakan ban karet, pada bagian kiri ban karet telah
dihubungkan dengan katrol, fungsi katrol ini agar dapat mempermudah
menghubungkan dengan katrol yang terdapat pada wiper. Katrol pada ban dan katrol pada wiper disambungkan O-ring karet sehingga ketika katrol pada wiper berputar maka pada katrol bagian ban karet akan bergerak dan alat akan jalan sesuai dengan yang diperintahkan oleh remote control.
Pipa Letter T yang digunakan dalam penelitian ini bertujuan untuk
memasang seluruh kompartemen yang ada seperti transmitter kamera, transmitter
GPS, rangkaian remote control dan kamera CCTV. Kamera CCTV menghadap kebawah sehingga pengamatan dilakukan secara horizontal, pada bagian pipa
pertama yaitu saklar pada bagian kanan dari alat ini digunakan untuk memutuskan dan menghubungkan arus dari motor wipper sedangkan saklar kedua pada bagian kiri untuk memutuskan dan menghubungkan arus pada GPS dan kamera CCTV.
Pipa 4 inc pada bagian belakang alat diletakan 4 buah aki, 2 buah aki dirangkai secara seri untuk penggunaan motor wipper dan 2 buah aki untuk GPS dan kamera CCTV. Bagian atas dari pipa terdapat 2 buah katrol yang
dihubungkan oleh akrilik 5 inc, ini digunakan untuk pergerakan alat dan penyangga alat, agar alat tetap seimbang antara bagian depan dan belakang.
Tali Long line merupakan bahan sebagai lintasan dari alat, Tali ini akan dijepitkan pada ban karet dibagian depan alat, ban ini telah terhubung dengan motor wipper. Tali long line ini dimasukan pada katrol bagian belakang sehingga alat akan tetap stabil dan berjalan dengan baik pada lintasan. Katrol pada bagian belakang hanya sebagai penyangga sedangkan ban karet pada bagian depan merupakan sistem penggerak dari alat LAOC.
Rangkaian remote control yang digunakan diambil dari bagian rangkaian pada mobil RC dimana rangkaian ini akan dirangkai bersama relay, saklar dan LED. Pergerakan dari alat hanya sebatas maju dan mundur karena digunakan pada dua buah lintasan. Saklar yang digunakan yaitu saklar tekan berjenis PTM (Push to Make), dimana saklar ini akan mengalirkan arus dari aki ketika saklar ditekan dan akan memutuskan aki ketika saklar tidak ditekan. LED yang
Gambar 5. Desain alat (a) Tampak samping dan (b) Tampak bawah
(a)
Pada desain alat dilihat dari tampak atas (Gambar 5a) terlihat 3 buah antena yaitu antena transmitter kamera, anttena transmitter GPS, dan antenna
remote control. Bagian depan alat terlihat 2 buah ban karet, 1 buah katrol dan bagian depan motor wipper, sedangkan pada bagian belakang terdapat dua buah katrol. Selain itu, terdapat dua buah saklar untuk menghidupkan dan mematikan alat, 2 buah ban karet yang diletakan atas dan bawah serta katrol pada bagian motor wipper. Alat tampak bawah (Gambar 5b) terlihat kamera CCTV yang menghadap kearah bawah sehingga perekamannya secara horizontal.
3.5.2 Perancangan Elektronika
3.5.2.1 Elektronika GPS dan YS1020UB
Elektronika yang digunakan pada pembuatan alat LAOC ini yaitu GPS tipe PMB-648, YS-1020UB dan USBer Serial, penggunaan YS-1020UB ini yaitu untuk pengiriman data GPS melalui gelombang radio yang digunakan oleh YS-1020UB, sedangkan untuk USBer Serial digunakan untuk penerimaan data GPS dengan YS-1020UB yang akan langsung dikirim dan ditampilkan ke layar PC atau laptop. Spesifikasi dari GPS tipe PMB-648, YS-1020UB dan USBer to Serial dapat dilihat pada Lampiran 2, 3 dan 4.
20
22
YS-1020UB yang terhubung dengan USBer dirangkai bersama kapasitor dan regulator, kaki-kaki pada YS-1020UB dihubungkan dengan USBer serial.
Ground dan Vcc pada YS-1020UB selain terhubung dengan USBer rangkaian ini juga terhubung dengan rangkaian kapasitor dan regulator (Gambar 7).
Gambar 8. Ilustrasi sistem pengiriman dan penerimaan data GPS
Sistem pengiriman data pada GPS hingga datanya dapat dilihat pada laptop yaitu dengan menggunakan gelombang radio sebagai sistem pemancarnya, gelombang radio yang digunakan yaitu 1020UB. Terdapat dua buah YS-1020UB yang berfungsi sebagai transmitter dan receiver. YS-1020UB yang digunakan sebagai transmitter akan langsung dihubungkankan dengan GPS sedangkan YS-1020UB yang digunakan sebagai receiver akan dihubungkan dengan USBer RS-232 yang berfungsi sebagai serial komunikasi sehingga data dapat langsung dilihat dilayar laptop atau PC (Gambar 8).
GPS tipe PMB-648 ini memiliki spesifikasi dapat mengirimkan data hingga ketinggian 18.000 m dan kecepatan hingga 515 m/s. Setiap detik GPS akan mengirimkan data berupa data NMEA-0813. GPS ini juga memiliki antena sendiri yang dapat menerima sinyal hingga 20 satelit, dan memiliki akurasi data 5m ketika GPS menerima sinyal dengan baik dari satelit. GPS tipe ini memerlukan masukan tegangan sebesar 5 Volt dan arus 65 mA. Penerimaan data pada GPS ini memerlukan serial komunikasi berupa TTL maupun RS-232, dalam penelitian ini menggunakan USBer PC-link dimana serial komunikasi yang
digunakan yaitu RS-232, spesifikasi dari GPS tipe PMB-648 dapat dilihat pada tabel 5.
Tabel 5. Spesifikasi data pada GPS PMB-648 GPS IC SiRFstar III
Receiver: Tracking up to 20 Satellites L1, 1575.42 MHz, C/A Code Acquisition
Time :
Cold Start : 42 sec (Average) Warm Start : 38 sec (Average) Hot Start : 1 Sec (Min.)
Sensitivity: Acquisition : -148 dBm Tracking : -159 dBm Dynamics: Altitude: 1800m (Max.)
Velocity: 515 m/s (Max.) Acceleration: ±4g (Max.) Navigation
Update Rate:
Once per Second (min.) Serial Port: TTL, RS232 (Optional)
Baud Rate: 4800 bps (optional 9600, 19300, 38400 bps) Output
Message:
NMEA0813 V2.2 GGA, GSV, GSA, RMC (Optional VTG, GLL)
Datum: WGS 84
Power supply: VDC 3.3V ~ 5V Power
Compsumption:
Typical 65mA @5VDC LED Function: Power on/off and Navigation Operating
Temp.:
-20 0C ~ +70 0C Storage Temp.: -30 0C ~ +85 0C Humidity: 5%~95%
Antenna Type: Built-in patch antenna
3.5.2.2 Elektronika Kamera CCTV
Kamera yang digunakan dalam pembuatan LAOC ini yaitu dengan menggunakan kamera CCTV jenis mini type low cost, sistem pentransmisian menggunakan gelombang radio, kamera cctv ini akan terhubung dengan sistem pentransmisi yang terdapat pada alat LAOC sedangkan USB TV box sebagai
Gambar 9. Sistem pentransmisian kamera CCTV melalui gelombang radio
3.5.2.3 Elektronika Motor Wiper Penggerak LAOC
Pada rancang bangun LAOC ini motor wiper sebagai penggerak dari alat, motor wiper ini memiliki spesifikasi masukan tegangan 12 Volt dengan daya 150W, kondisi ini mempermudah motor untuk dapat berfungsi dengan baik walaupun membawa beban yang berat. Motor wiper ini terhubung dengan relay,
remote control, aki, dioda, resistor, dan LED. Motor wiper ini membutuhkan tegangan 12 Volt yang diambil dari aki 6Volt yang dirangkai secara seri, resistor, LED, dioda dan saklar dirangkai bersama relay dan disambungkan pada remote control. Spesifikasi dari motor yang digunakan untuk sistem penggerak dari alat LAOC dapat dilihat pada tabel 6.
Tabel 6. Spesifikasi motor wiper
Model Nominal Voltage
Nominal Power
No-Load Current
Stall Curernt No-Load Speed rpm Stall Torque ≥N.m Low Speed High Speed Low Speed High Speed Low Speed High Speed ZD1733 DC12V 150W 2.5 4.5 65 25 ± 5 35 ± 5 95
Ground pada motor wiper disambungkan dengan kaki 2 pada relay pertama dan kaki 7 pada relay kedua, sedangkan Vcc pada motor wiper disambungkan dengan kaki 7 pada relay pertama dan kaki 2 pada relay ke-2. Rangkaian remote control akan dihubungkan dengan dioda dan disambungkan dengan kaki pertama pada relay yang disambungkan dengan relay kedua, dari relay kedua dipasangkan kembali kerangkaian motor wiper,
Kamera CCTV
25
26
kaki 4 pada masing-masing relay dihubungkan dengan aki positif dan kaki 8 pada kedua relay akan dihubungkan pada aki negatif (Gambar 10).
3.5.2.3 Elektronika Komponen GPS dan Kamera CCTV pada LAOC
Komponen GPS digabungkan dengan kamera CCTV sebab GPS memerlukan tegangan 5 Volt sehingga dapat disatukan dengan kamera CCTV. Penggabungan ini juga lebih mengefisienkan kerja saklar sebagai pemutus dan penghubung arus. GPS dan kamera CCTV dirangkai bersamaan dan dipisahkan dari rangkaian motor wiper. Rangkaian ini dimaksudkan agar tidak terganggu sistem pemancaran dan penerimaan data, sebab ketika GPS maupun kamera CCTV disatukan dengan motor, maka hasil dari pengiriman data akan terganggu sehingga gambar atau data yang diterima menjadi rusak.
27
28
3.5.3 Mekanisme Pembuatan Software
3.5.3.1 Pembuatan Software Google Sketch Up 7
Software yang digunakan untuk pembuatan desain mekanik ini yaitu dengan menggunakan software Google Sketch Up 7, Keterangan desain gambar dapat berupa 3D maupun 2D. Pembuatan desain ini dimaksudkan untuk mempermudah pada saat pembuatan alat (Gambar 12).
Gambar 12. Tampilan Google Skecth Up
3.5.3.2 Pembuatan Software Eagle 5.2.0
Gambar 13. Tampilan Eagle 5.2.0 Light
3.5.3.3 Software Terminal.exe
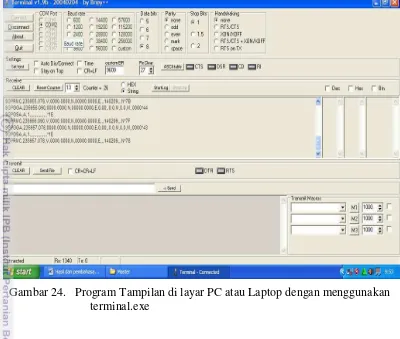
Software ini digunakan untuk penampilan data GPS yang akan dikirimkan oleh YS-1020UB sebagai Transceiver, data ini mengirimkan posisi waktu dan tanggal pengambilan data, data yang akan ditampilkan masih berbentuk data NMEA-0813, yaitu bahasa yang digunakan oleh seluruh GPS. Perekaman data yang akan disimpan berupa format *.log (Gambar 14).
Gambar 14. Tampilan Terminal.exe
Mengirim dan mematikan data pengiriman
Port yang digunakan
Perekaman data *.log
3.6 Proses Pembuatan Hasil Akhir
Hasil akhir dari perekaman data GPS yaitu berbentuk (*.log) dan perekeman video akan berbentuk (*.mpg), data GPS akan mengirimkan data posisi yang meliputi lintang dan bujur, waktu pengambilan data, tanggal pengambilan data, sinyal satelit yang diterima oleh GPS, ketinggian GPS dan kecepatan. Pengambilan data video akan direkam, hasil akhir yang dilakukan adalah mengetahui posisi dan waktu pengambilan dari objek yang terekam dalam video (Gambar 15).
Gambar 15. Diagram Alir Proses Hasil Akhir
3.7 Bahasa NMEA-0813 pada GPS tipe PMB 648
NMEA merupakan kalimat bahasa yang ada pada program GPS, NMEA ini meliputi kalimat, Keterangan pada kata pertama merupakan pendefinisian dari kalimat. Setiap jenis kata memiliki arti yang berbeda-beda seperti dibawah ini, merupakan program yang terdapat pada GPS tipe PMB-648 (Badelley, 2001).
Data Global Positioning System (GPGGA)
$ GPGGA, 123456, 4807.038, N, 10643.4474, E, 1, 08, 0.9, 545.4, M, 46, 9, M, , *47
keterangan :
GGA = Data Global Positioning System
123456 = Waktu pengambilan data 12 :34 :56 UTC
GPS Mulai
Perekaman Video
Kamera CCTV Motor Wiper
*.mpg
Perekaman data Posisi, waktu, tanggal dan ketinggian
Pergerakan LLOC (maju dan mundur)
4807.038, N = Lintang 48007, 038’ N 10643.4474, E = Bujur 106043, 4474’ E
1 = Data yang digunakan baik; 0=data yang digunakan tidak valid 08 = Jumlah satelite yang dilacak
0, 9 = Posisi Horizontal yang lemah
545.4, M = Ketinggian dalam Meter diatas permukaan laut
46, 9, M = Tinggi Geoid (tinggi rata-rata permukaan laut) diatas WGS 84 *74 = data checksum, selalu dimulai dengan *
Status dari satelite yang terekam (GPGSA)
$ GPGSA, A, 3, 04, 05, , 09, 12 , , , 24 , , , , , 2.5, 1.3, 2.1 *39 Keterangan :
GSA = Status dari satelite
A = Auto ; M=Manual
3 = pilihan antara 3D dengan 2D (M =Manual) 04, 05 = PRNs dari satelit yang digunakan (spcae 12) 2, 5 = PDOP (ketelitian yang lemah)
1, 3 = Ketelitian secara horizontal (HDOP) 2, 1 = Ketelitian secara Vertikal (VDOP) *39 = Data checksum, selalu dimulai dengan *
Data Satelit (GPGSV)
$ GPGSV, 2, 1, 08, 01, 40, 083, 46, 02, 17, 308, 41, 12, 07, 344, 39, 14, 22, 228, 45 *75
Keterangan :
GSV = Satelit
2 = Jumlah kalimat untuk data penuh 1 = Kalimat 1 dari 2
08 = Satelit yang dapat dideteksi 01 =Jumlah Satelit PRN
40 = Sudutelevasi 083 = sudut Azimuth
46 =SNR- lbih tinggi lebih baik
* 75 = Data Checksum, selalu dimulai dengan *
Data posisi, kecepatan dan tanggal (GPRMC)
$ GPRMC, 123456, A, 4807, 038, N, 116, 138, E, 022.4, 084.4, 230394, 003.1, W * 6A
Keterangan :
RMC = Rekomendai kalimat C
A = status A =Aktif; V=Void 4807, 038, N = Lintang 48007, 038’ N 1167, 138, E = Bujur 11607, 138’ E
022, 4 = Kecepatan diatas tanah dalam knot 0, 084.4 = Sudut dalam derajat
230394 = Tanggal pengambilan data 23 Maret 1994 003, 1, W = Variasi magnetic
*6A = Data checksum, selalu dimulai dengan *
3.8 Perhitungan Laju Alat LAOC
Laju alat dihitung secara perumusan,menurut Giancoli (2001) laju merupakan seberapa jauh sebuah benda berjalan dalam suatu selang waktu tertentu. Rumus dari laju yaitu:
4. HASIL DAN PEMBAHASAN
4.1 Rangkaian Low Altitude Observation Camera (LAOC)
Rancang bangun dalam penelitian ini diberi nama LAOC atau Low Altitude Observation Camera. Rancang bangun ini memiliki fungsi untuk melihat pergerakan hewan yang peka terhadap manusia, mengetahui waktu pada saat hewan tersebut terekam, dan dapat terlihat posisi hewan tersebut terekam. Uji coba alat ini dilakukan di lantai 4 gedung Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu kelautan, Institut Pertanian Bogor. Selama dilakukan uji coba alat ini dapat berfungsi dengan baik, dimulai dengan pergerakan alat yang menggunakan motor DC jenis wiper yang telah di modifikasi, pengiriman data GPS dan pengiriman rekaman kamera secara real time dengan menggunakan kamera CCTV.
Alat ini memiliki beberapa keunggulan seperti dapat melihat pergerakan hewan tanpa membuat hewan merasa terganggu dengan wilayah pengamatan yang telah ditentukan, menggunakan sistem gerak terkontrol yaitu dengan
menggunakan remote control yang dapat berfungsi untuk sistem maju dan mundur dari alat LAOC, dapat mengirimkan gambar secara real time dengan sistem transmisi data dengan menggunakan kamera CCTV, serta dapat mengirimkan data posisi meliputi lintang dan bujur, waktu, tanggal, kecepatan dan ketinggian alat secara continue dengan menggunakan sistem gelombang radio.
merah kamera ini hemat dalam penggunaan daya listrik (Alnect Komputer, 2009). Transmisi dari kamera CCTV kepada transmitter kamera CCTV yaitu berjarak ± 15 meter dengan menggunakan gelombang radio 1,2 GHz sehingga dapat
menembus dinding atau tembok.
GPS yang digunakan berjenis PMB-648 dimana memiliki antenna
tersendiri sehingga dapat mencari dan menerima sinyal dengan baik, GPS ini juga dapat menerima sinyal satelit sebanyak 20 satelit, GPS jenis ini juga cocok untuk sistem navigasi pada kendaraan, aplikasi sistem pemetaan, alat tracking, serta untuk navigasi pada bidang kelautan.
Sistem dari gelombang radio yang digunakan memiliki beberapa keunggulan seperti dapat mengirimkan data jarak jauh yang efektif tanpa
menggunakan kabel, memiliki nilai ekonomis yang murah dibandingkan dengan sistem pengiriman data melalui GSM atau melalui internet. Gelombang radio yang digunakan yaitu tipe YS-1020UB dimana YS-1020UB ini merupakan jenis
Transceiver, dapat dipakai untuk transmitter dan dapat digunakan untuk receiver.
Transmitter pada YS-1020UB ini dapat mengirimkan gelombang radio sejauh 100-800 m.
Alat LAOC (Gambar 16) memiliki dua buah saklar yang berfungsi untuk memutuskan aliran listrik, saklar ini disambungkan dengan lampu LED dimana lampu LED ini berfungsi sebagai indikator bahwa alat sudah berfungsi. Saklar ini dibedakan menjadi dua fungsi, yaitu saklar pada bagian kiri untuk
untuk pengiriman data sedangkan GPS hanya membutuhkan tegangan 5 V untuk pengiriman data, Motor wiper membutuhkan tegangan 12 V untuk menggerakan alat.
Ket : (a) Antenna Kamera CCTV; (b) Antenna GPS; (c) Antenna remote control; (d) Ban karet sebagai system penggerak; (e) Lintasan LAOC.
.Gambar 16. Alat LAOC (Low Altitude Observation Camera)
Motor wiper dipisahkan sendiri dari mulai saklar dan pemakaian aki ini disebabkan karena motor ini membutuhkan arus yang besar dan tidak dapat disatukan dengan GPS dan kamera, selain itu alasan lain yaitu karena akan menggangu sistem pengiriman data GPS dan kamera. Bagian dalam dari alat (Gambar 17) terdapat 3 buah rangkaian yaitu: rangkaian remote control dan relay, rangkaian GPS dan YS-1020UB dan rangkaian kamera CCTV dan transmitter kamera.
Aki yang digunakan pada penelitian ini sebanyak 4 buah dengan spesifikasi tegangan 6 V dan arus 0,39A, 2 buah aki dirangkai seri sehingga menghasilkan tegangan sebesar 12 V untuk penggunaan motor wiper dan 2 buah
540 Milimeter
160 Milimeter
295 Milimeter
Satuan = milimeter
(d) (e)
aki dirangkai secara seri untuk penggunaan transmitter kamera CCTV dan
transmitter GPS.
Ket : (a) Rangkaian remote control; (b) Rangkaian GPS dan YS-1020Ub; (c) Rangkaian transmitter kamera CCTV; (d) Rangkaian relay.
Gambar 17. Bagian dalam dari LAOC
LAOC memiliki dua buah lintasan, sehingga ketika alat dipasang diatas ketinggian ± 2 meter lintasan alat akan tetap stabil dalam pengambilan data perekaman video, dan memperkecil gerakan yang tidak diinginkan. Seluruh antenna yang menjadi penghubung antara transmitter dan receiver baik kamera CCTV, GPS dan remote control menghadap kebagian atas sehingga data yang dikirim menjadi lebih baik. Tali yang digunakan sebagai lintasan yaitu tali long line. Alasan penggunaan tali long line yaitu sistem penggerak dari alat ini akan berfungsi dengan baik dalam kondisi cuaca apapun, yaitu pada saat kondisi cuaca hujan sehingga lintasan tidak licin dan alat dapat berjalan dengan baik.
(d
(c) (b)
Penempatan komponen seperti motor wiper pada bagian depan dan aki dibagian belakang ini agar alat seimbang selain itu penempatan motor wiper di bagian luar dari pipa agar tidak terjadi efek induksi magnet untuk pengiriman data GPS dan kamera CCTV, sedangkan pada bagian tengah yaitu pada pipa Letter T berfungsi untuk menyimpan komponen seperti kamera, rangkaian Transmitter
Kamera, rangkaian GPS, serta rangkaian dari remote control dan motor. Alat LAOC ini memiliki berat sebesar 5 kg, berat ini sudah sangat baik untuk alat. Penempatan motor wiper pada bagian depan dan aki pada bagian belakang ini agar alat seimbang. Lintasan yang digunakan yaitu tali longline, agar tali tetap tegang pada saat alat diletakan dilintasan menggunakan kuku macan sehingga tali tetap tegang.
4.2 Sistem Transmisi dari Alat LAOC
4.2.1 Sistem Transmisi Data GPS
GPS yang digunakan yaitu GPS tipe PMB-648 yang diproduksi oleh parallax.inc, keluaran dari GPS ini yaitu NMEA-0813 melalui komunikasi serial USBer PC-link, penelitian ini menggunakan USBer PC-link yang disambungkan dengan 1020UB sebagai penerima data GPS melalui gelombang radio, YS-1020UB merupakan alat yang berfungsi sebagai Transceiver yaitu Transmitter
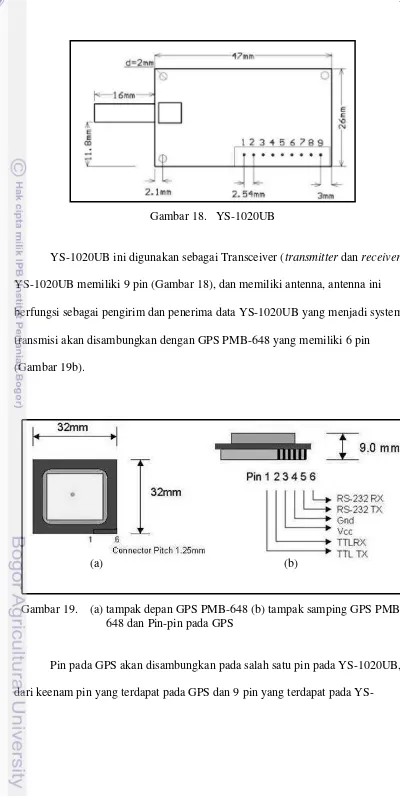
Gambar 18. YS-1020UB
YS-1020UB ini digunakan sebagai Transceiver (transmitter dan receiver). YS-1020UB memiliki 9 pin (Gambar 18), dan memiliki antenna, antenna ini berfungsi sebagai pengirim dan penerima data YS-1020UB yang menjadi system transmisi akan disambungkan dengan GPS PMB-648 yang memiliki 6 pin (Gambar 19b).
Gambar 19. (a) tampak depan GPS PMB-648 (b) tampak samping GPS PMB- 648 dan Pin-pin pada GPS
Pin pada GPS akan disambungkan pada salah satu pin pada YS-1020UB, dari keenam pin yang terdapat pada GPS dan 9 pin yang terdapat pada
1020UB hanya empat pin yang akan disambungkan kemasing-masing pin pada GPS yaitu pin 1 (TTL TX), pin 2(TTL RX), pin 3(Vcc), dan pin 4 (GND); sedangkan pada YS-1020UB yaitu pin 1(GND), pin 2(VCC), pin 3(RXD/TTL), dan pin 4 (TXD/TTL). Rangkaian GPS dan YS1020UB akan dirangkai kembali bersama kapasitor dan regulator IC7805 (Gambar 20). GPS tipe ini juga
memiliki antenna tersendiri, dimana antenna ini berfungsi mencari sinyal satelit agar mendeteksi posisi, antenna yang terdapat pada GPS cukup baik dan mampu menerima sinyal walau tertutup oleh bahan-bahan yang tipis, seperti akrilik, pipa paralon, maupun baja, Dalam penelitian ini antenna pada GPS tertutup oleh pipa paralon sebagai casing dari seluruh rangkaian. Pengiriman melalui gelombang radio diperlukan antenna tambahan yaitu antenna bawaan dari YS-1020UB, sehingga data yang telah direkam oleh GPS dapat langsung dikirimkan melalui gelombang radio pada penerima dan disimpan langsung pada laptop atau PC.
[image:39.595.109.511.468.688.2]Ket : (a) Kapasitor; (b) GPS PMB-648; (c) YS-1020UB; (d) Regulator IC7805; (e) Antenna GPS PMB-648
Gambar 20.Rangkaian Sistem Transmisi GPS dengan menggunakan YS-1020UB
(e) (d)
(a) (c)
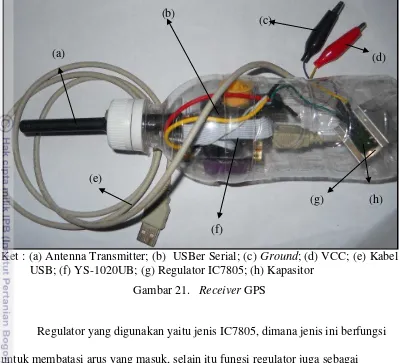
USber akan dipasangkan dengan YS-1020UB sebagai receiver yang akan disambungkan dengan kapasitor sebagai penyimpan muatan listrik dalam jumlah besar dan regulator. YS-1020UB yang digunakan sebagai receiver membutuhkan tegangan 6 V agar data dapat diterima dengan baik pada layar PC alat laptop, data yang akan ditampilkan pada PC atau laptop akan diterima oleh program
terminal.exe.
YS-1020UB memiliki 9 pin yang hanya akan digunakan Tx, Rx, Ground
Ket : (a) Antenna Transmitter; (b) USBer Serial; (c) Ground; (d) VCC; (e) Kabel USB; (f) YS-1020UB; (g) Regulator IC7805; (h) Kapasitor
Gambar 21. Receiver GPS
Regulator yang digunakan yaitu jenis IC7805, dimana jenis ini berfungsi untuk membatasi arus yang masuk, selain itu fungsi regulator juga sebagai
Thermal Shutdown yaitu memutuskan arus apabila regulator terlalu panas (Bishop, 2004). Kapasitor sendiri berfungsi untuk menyimpan muatan listrik. Masukan yang dibutuhkan untuk transmitter dan receiver GPS ini yaitu +5V, sebab regulator yang digunakan yaitu jenis IC 7805, dua digit angka terakhir memiliki fungsi sebagai masukan yang akan digunakan pada rangkaian.
(g) (c)
(d)
(e)
(f) (b)
(a)
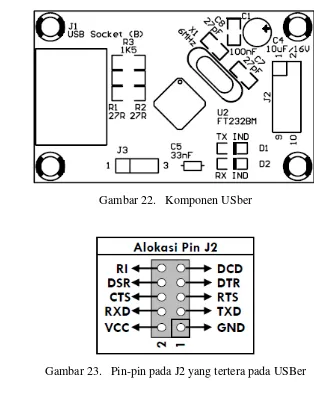
Gambar 22. Komponen USber
Gambar 23. Pin-pin pada J2 yang tertera pada USBer
Gambar 24. Program Tampilan di layar PC atau Laptop dengan menggunakan terminal.exe
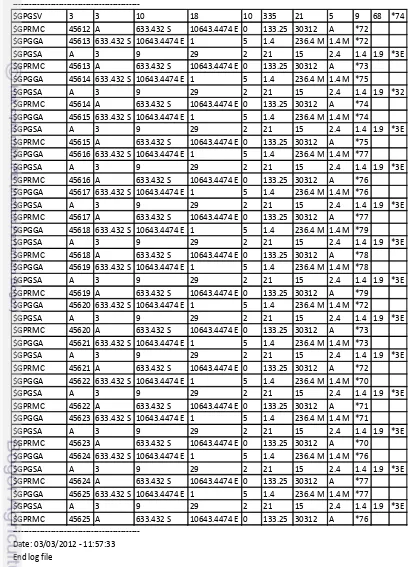
GPS yang digunakan memiliki spesifikasi yaitu akurasi data ±5 meter, sehingga data yang akan dikirimkan dapat berpindah posisi seperti dalam penelitian ini pengambilan data pada saat GPS ditempatkan diam, akurasi data hingga mencapai 8 meter, ini dikarekan kondisi cuaca pada saat pengambilan data berawan sehingga data posisi yang diambil berubah posisi hingga 8 meter.
Tabel 7. Contoh pengambilan data bertempat di Fakultas Perikanan dan Ilmu Kelautan
Terminal log file
Date: 03/03/2012 - 11:56:15
---$GPGSV 3 3 10 18 10 335 21 5 9 68 *74 $GPRMC 45612 A 633.432 S 10643.4474 E 0 133.25 30312 A *72
$GPGGA 45613 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *72
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45613 A 633.432 S 10643.4474 E 0 133.25 30312 A *73
$GPGGA 45614 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *75
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *32 $GPRMC 45614 A 633.432 S 10643.4474 E 0 133.25 30312 A *74
$GPGGA 45615 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *74
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45615 A 633.432 S 10643.4474 E 0 133.25 30312 A *75
$GPGGA 45616 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *77
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45616 A 633.432 S 10643.4474 E 0 133.25 30312 A *76
$GPGGA 45617 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *76
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45617 A 633.432 S 10643.4474 E 0 133.25 30312 A *77
$GPGGA 45618 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *79
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45618 A 633.432 S 10643.4474 E 0 133.25 30312 A *78
$GPGGA 45619 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *78
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45619 A 633.432 S 10643.4474 E 0 133.25 30312 A *79
$GPGGA 45620 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *72
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45620 A 633.432 S 10643.4474 E 0 133.25 30312 A *73
$GPGGA 45621 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *73
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45621 A 633.432 S 10643.4474 E 0 133.25 30312 A *72
$GPGGA 45622 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *70
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45622 A 633.432 S 10643.4474 E 0 133.25 30312 A *71
$GPGGA 45623 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *71
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45623 A 633.432 S 10643.4474 E 0 133.25 30312 A *70
$GPGGA 45624 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *76
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45624 A 633.432 S 10643.4474 E 0 133.25 30312 A *77
$GPGGA 45625 633.432 S 10643.4474 E 1 5 1.4 236.4 M 1.4 M *77
$GPGSA A 3 9 29 2 21 15 2.4 1.4 1.9 *3E $GPRMC 45625 A 633.432 S 10643.4474 E 0 133.25 30312 A *76
[image:44.595.104.516.141.708.2]4.2.2 Sistem Transmisi Kamera CCTV
Kamera CCTV ini memiliki kegunaan dan fungsi masing-masing, kamera CCTV yang digunakan dalam penelitian ini yaitu tipe kamera CCTV mini-type low cost, kamera CCTV ini memiliki lensa focus 6.0 mm dan sudut lensa 600 (Gambar 25). Pengiriman data video dilakukan dengan mentransmisikan video yang telah terekam oleh kamera dan dikirimkan kepada receiver yang tersambung dengan PC atau laptop.
Ket : (a) Masukan arus; (b) Transmitter Kamera; (c) Kabel video; (d) Kabel audio; (e) Kamera CCTV
Gambar 25. Rangkaian Receiver kamera CCTV
Kamera CCTV akan disambungkan dengan sistem receiver, yaitu menghubungkan setiap kabel, kabel kuning untuk kabel video dan kabel putih untuk kabel Audio, fungsi dari kedua kabel yaitu kabel video untuk perekaman video sedangkan kabel audio untuk perekaman suara. Rangkaian kamera CCTV
(a)
(b)
(c)
(d)
ini membutuhkan tegangan yaitu 12 V dan kondisi gambar akan terganggu ketika CCTV ini didekati bahan-bahan yang berbahan dasar besi.
Ket : (a) CCTV Video Kamera; (b) VCC; (c) Kabel audio; (d) Kabel video; (e) Ground; (f) USB2.0 TVBOX
Gambar 26. Receiver Kamera CCTV
Kamera CCTV ini akan mengirimkan data gambar yang akan diterima oleh CCTV Video Kamera yang akan ditampilkan di layar PC atau laptop dengan program USB TV BOX, gambar yang telah diterima dapat direkam atau hanya untuk melihat gambar saja. Gambar yang telah terekam oleh kamera akan disimpan dalam bentuk *.mpg (Gambar 26).
(f)
(a)
(e)
(b) (c)
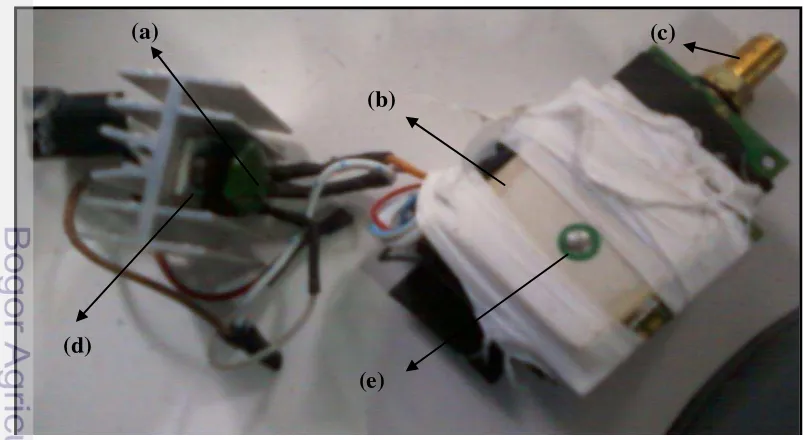
4.3 Sistem Kerja Motor sebagai Alat Penggerak
Motor DC yang digunakan untuk sistem pergerakan alat yaitu motor wiper, salah satu keunggulan motor wiper ini yaitu dapat mengangkat beban lebih dari 5 kg. Motor wiper ini berfungsi untuk mengendalikan pergerakan dari alat LAOC ini, yaitu menghubungkannya dengan rangkaian remote control yang diambil dari mobil RC, rangkaian ini berfungsi untuk menjalankan maju dan mundur alat.
Ket : (a) Motor DC; (b) O-ring; (c) Ban karet; (d) Antenna kamera CCTV; (e) Antenna GPS; (f) Antenna remote control; (g) Kamera CCTV.
Gambar 27. Bagian pada motor wiper
Motor wiper ini ditempatkan dibagian depan dan diluar dari pipa ini dikarenakan agar rangkaian tidak terganggu dengan jalannya motor wiper yang dapat menyebabkan induksi magnet (Gambar 27). Selain itu motor wiper ditempatkan dibagian depan agar antara depan dan belakang seimbang, motor
(a)
(b) (c)
(d) (e) (f)
wiper ini dirakit dengan menggunakan akrilik 5 inc sebagai penahan beban dan sebagai alat untuk mempersatukan bagian antara pipa dan motor wiper.
Penggunaan ban dari karet sebagai alat untuk lintasan agar ketika
dijalankan maju atau mundur ban tidak licin, penggunaan dua ban karet dibagian atas dan bawah digunakan untuk penahan alat ketika berjalan sehingga tali akan dijepit dikedua ban karet tersebut. Pengunaan katrol dikedua sisi, sisi pertama pada motor wiper dan sisi kedua pada bagian ban karet dimaksudkan ketika katrol yang terdapat pada motor wiper berputar maka pada katrol dibagian ban karet berputar juga, katrol ini akan dihubungkan dengan O-ring.
4.4 Hasil Uji Coba alat LAOC
Alat LAOC ini diujikan di lantai 4 gedung Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan-Institut Pertanian Bogor. Alat dapat berfungsi dengan baik yaitu bergerak secara maju dan mundur. Pada dua kali uji coba dilapangan dengan menggunakan 2 tali yang berbeda hasilnya lebih baik menggunakan tali long line, sebab pada saat alat LAOC ini berada ditengah lintasan tali yang mencekung akan membuat alat harus berjalan naik, dengan tali
long line alat dapat berjalan naik dengan baik.
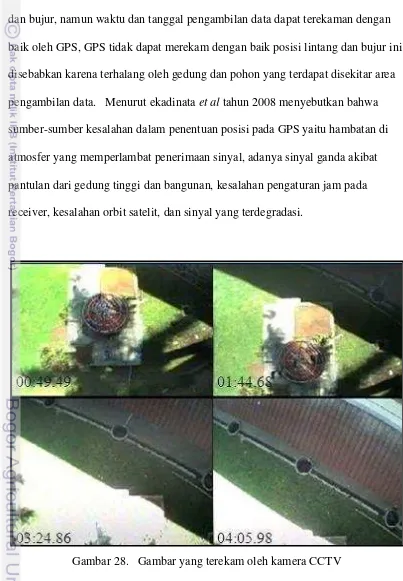
Uji coba dengan GPS dan kamera CCTV sudah baik, kamera CCTV dapat merekam dengan baik seluruh area yang terekam oleh kamera, namun sesekali terdapat gangguan pada perekaman (Gambar 28). Uji coba pada GPS mengalami sedikit gangguan yaitu receiver tidak dapat menerima dengan baik posisi lintang dan bujur, namun waktu dan tanggal pengambilan data dapat terekaman dengan baik oleh GPS, GPS tidak dapat merekam dengan baik posisi lintang dan bujur ini disebabkan karena terhalang oleh gedung dan pohon yang terdapat disekitar area pengambilan data. Menurut ekadinata et al tahun 2008 menyebutkan bahwa sumber-sumber kesalahan dalam penentuan posisi pada GPS yaitu hambatan di atmosfer yang memperlambat penerimaan sinyal, adanya sinyal ganda akibat pantulan dari gedung tinggi dan bangunan, kesalahan pengaturan jam pada receiver, kesalahan orbit satelit, dan sinyal yang terdegradasi.
Kecepatan pergerakan dari alat ini yaitu 0.072 m/s, kecepatan ini dapat dianggap baik, karena kecepatan alat yang terlalu cepat akan menyebabkan video yang merekam gambar tidak akan baik, selain itu pergerakan yang terlalu cepat akan membuat penampakan gambar akan blur, kecepatan ini dihitung secara manual bukan dari alat GPS.
Pada penelitian kali ini data GPS pada terminal.exe tidak dapat disatukan dengan data pada kamera CCTV, sebab pada GPS tipe PMB-648 ini tidak menggunakan mikrokontroler sehingga data yang keluar pada terminal.exe
merupakan data mentah dari bahsa NMEA-0813. Kamera CCTV dan GPS saling melengkapi, karena pada perekaman data video dengan menggunakan kamera CCTV ini tidak dapat menampilkan waktu dan tanggal pengambilan data, sedangkan waktu dan tanggal pengambilan data ini dilakukan oleh GPS.
Tabel 8. Data GPS pada uji coba di lantai 4 gedung Ilmu dan Teknologi Kelautan
Terminal log file
Date: 04/04/2012 - 12:09:52
---
$GPGGA 51042.21 633.4322 S 10643.4444 E 0 0 227.1 M 1.4 M 0000*5B
$GPGSA A 1 *1E
$GPRMC 51042.21 V 633.4322 S 10643.4444 E 40412 N*6E $GPGGA 51043.21 633.4322 S 10643.4444 E 0 0 227.1 M 1.4 M 0000*5A
$GPGSA A 1 *1E
$GPRMC 51043.21 V 633.4322 S 10643.4444 E 40412 N*6F $GPGGA 51044.21 633.4322 S 10643.4444 E 0 0 227.1 M 1.4 M 0000*5D
$GPGSA A 1 *1E
$GPRMC 51044.21 V 633.4322 S 10643.4444 E 40412 N*68 $GPGGA 51045.21 633.4322 S 10643.4444 E 0 0 227.1 M 1.4 M 0000*5C
--- Date: 04/04/2012 - 12:22:13
End log file
disebabkan waktu yang terdapat pada GPS masih berbentuk UTC ( Universal Time Coordinate ), jadi waktu pengambilan data yang sesungguhnya yaitu 12:09:49, sedangkan tanggal pengambilan pada kolom 6 untuk bahsa $GPRMC data sudah benar 40412 yaitu tanggal 4 bulan 04 tahun 2012.
Posisi lintang dan bujur yang tertera pada kolom 2, 3 dan 4. Kolom 2 pada $GPGGA merupakanyaitu 0633.4322 S dan 10643.4444 E ini yang berarti 60 33’
25,93” dan 1060 43’ 26,6”
5. KESIMPULAN DAN SARAN
5.1 Kesimpulan
Hasil dari penelitian ini adalah Low Altitude Observation Camera (LAOC) ini dapat berfungsi dengan baik, dimulai dengan pengiriman data GPS yang memiliki akurasi data 5 meter, dan dapat mengirimkan data waktu, tanggal, posisi meliputi lintang dan bujur, ketinggian diatas permukaan laut dan ketinggian rata-rata tinggi muka laut, selain itu penggunaan kamera CCTV sebagai alat untuk merekam video sudah berfungsi dengan baik, penggunaan motor wiper sebagai alat penggerak dapat dikatakan sudah sangat baik, sebab motor wiper dapat menopang beban hingga 5 kg.
Hasil pengamatan dari struktur rangka yang dibuat dari bahan pipa dan akrilik 5 mm merupakan rangka yang baik untuk alat LAOC ini penggunaan akrilik sebagai penyangga dan penopang dari motor wiper sangat baik yaitu dapat menopang beban 5 kg dari alat ini, selain itu pemakaian pipa letter T sebagai tempat kamera CCTV sudah sangat baik sebab dapat melindungi kamera dari guncangan yang berasal dari luar dan dapat melindungi kamera dari air dan angin sehingga kamera tetap stabil dalam mengambil gambar.
5.2 Saran
Saran untuk penelitian selanjutnya yaitu penambahan solar panel pada alat dan converter sehingga alat dapat berfungsi pada siang dan malam hari,
penggunaan lintasan dengan berbahan besi sehingga lintasan alat tetap stabil dan tegang atau membuat dengan satu lintasan sehingga lebih mudah untuk diikatkan.
Penggunaan Mikrokontroler agar bahasa NMEA yang terdapat pada GPS dapat dipisahkan dan digunakan sesuai dengan kebutuhan, penggunaan
RANCANG BANGUN PROTOTIPE WIRELESS LOW
ALTITUDE OBSERVATION CAMERA (LAOC)
RETNOWULANDARI WAHYUNINGTIAS
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Dengan ini saya menyatakan bahwa Skripsi yang berjudul:
RANCANG BANGUN PROTOTIPE WIRELLES LOW
ALTITUDE OBSERVATION CAMERA (LAOC)
adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan didalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir Skripsi ini.
Bogor, Mei 2012
iii
RINGKASAN
RETNOWULANDARI WAHYUNINGTIAS. Rancang Bangun Prototipe Wireless Low Altitude Observation Camera (LAOC). Dibimbing oleh TOTOK HESTIRIANOTO.
Studi ekosistem satwa liar untuk pengamatan secara langsung terhadap satwa liar sangat penting dalam metode untuk mempelajari beberapa aspek kehidupan seperti perilaku hewan tersebut atau pergerakannya, dalam melakukan pengamatannya sangat sulit dilakukan terutama untuk jenis hewan-hewan yang peka terhadap manusia, selain itu kawasan hutan mangrove yang sangat lebat dengan perakaran yang tinggi dan rapat sehingga membuat peneliti akan sulit untuk mengamati dan akan mengurangi ketelitian ketepatan hasil studi.
Kendala-kendala ini dapat diperkecil dengan menggunakan system telemetri atau pengukuran jarak jauh, system telemetri ini dapat menggunakan gelombang radio untuk system pengiriman datanya. Penelitian ini dilaksanakan pada bulan Oktober 2011 hingga April 2012 bertempat di Laboratorium Workshop Akustik dan Instrumentasi Kelautan, Departemen Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor
Rancang bangun dalam penelitian ini diberi nama Low Altitude Observation Camera (LAOC), rancang bangun ini memiliki dimensi panjang 540 mm, dengan tinggi 160 mm, dan lebar 295 mm. alat ini dibagi menjadi 3 bagian yaitu, bagian depan sebagai penggerak dengan menggunakan motor wiper, bagian tengah sebagai tempat penyimpanan komponen dan pada bagian belakang ditempatkan 4 buah akki dengan spesifikasi tegangan 6 volt dengan arus 0,39 A. Alat ini dapat mengirimkan data berupa waktu dan tanggal pengamatan, posisi pengamatan, kecepatan alat dan hasil berupa video perekaman data secara real time.
Alat ini dapat berfungsi dengan baik dimana pengambilan data dilakukan di lantai 4 gedung Ilmu dan Teknologi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor pada tanggal 4 april 2012. Alat ini dapat merekam video dengan baik, namun kondisi GPS tidak dapat menerima posisi baik lintang maupun bujur serta kecepatan dari alat, GPS hanya dapat mengirimkan data waktu dan tanggal dengan benar. Rangka yang digunakan dalam penelitian ini sudah baik dengan menggunakan pipa paralon 4 inchi dan akrilik 5 inchi.
© Hak cipta milik IPB, tahun 2012
Hak cipta dilindungi Undang-Undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini tanpamencantumkan atau menyebutkan sumber
a. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah
b. Pengutipan tidak merugikan kepentingan yang wajar IPB
v
RANCANG BANGUN PROTOTIPE WIRELESS LOW
ALTITUDE OBSERVATION CAMERA (LAOC)
RETNOWULANDARI WAHYUNINGTIAS
SKRIPSI
sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan pada
Departemen Ilmu dan Teknologi Kelautan Fakultas Perikanan dan Ilmu Kelautan
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Judul : RANCANG BANGUN PROTOTIPE WIRELESS LOW ALTITUDE OBSERVATION CAMERA (LAOC)
Nama : Retnowulandari Wahyuningtias
NRP : C54070082
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui, Dosen Pembimbing
Dr. Ir. Totok Hestirianoto, M.Sc NIP. 19620324 198603 1 001
Mengetahui
Ketua Departemen Ilmu dan Teknologi Kelautan
Prof. Dr. Ir. Setyo Budi Susilo, M.Sc. NIP. 1950909 198303 1 003
vii
KATA PENGANTAR
Puji dan syukur penulis panjatkan atas kehadirat Allah SWT, karena berkat rahmatNyalah penulis dapat menyelesaikan Skripsi ini. Skripsi ini berjudul “RANCANG BANGUN PROTOTIPE WIRELESS LOW ALTITUDE OBSERVATION CAMERA (LAOC)”. Diajukan sebagai salah satu syarat untuk mendapatkan gelar Sarjana Ilmu Kelautan.
Pada kesempatan ini, penulis mengucapkan terima kasih kepada semua pihak yang telah mendukung hingga Skripsi ini dapat terselesaikan:
1. Allah SWT yang telah memberikan kesehatan dan kemudahan selama penulis menyelesaikan Skripsi ini.
2. Orang tua (Hartini dan Ismardianto) beserta keluarga yang telah memberikan dukungan, do’a dan semangat kepada penulis.
3. Dr. Ir. Totok Hestirianoto, M.Sc sebagai dosen Pembimbing yang telah memberikan saran dan kritik kepada penulis.
4. Prof. Dr. Ir. Indra Jaya, M. Sc Sebagai dosen penguji tamu atas saran sehingga Skripsi ini menjadi lebih baik.
5. Dr. Ir Henry M. Manik, MT sebagai Ketua Program Studi ITK atas saran dan masukannya sehingga Skripsi ini menjadi lebih baik.
6. M. Iqbal (ITK’37) yang telah meluangkan waktunya untuk membantu dalam
proses penelitian ini, Annur Solichin (ITK’41) , Iman, Holand, Erik M
(ITK’43), dan seluruh pihak di bengkel workshop akustik dan instrumentasi
dan
8. Seluruh keluarga besar ITK, khususnya untuk ITK’ 44 yang telah membantu dan menyemangati selama penulis mengerjakan Skripsi ini.
Penulis menyadari bahwa penulisan Skripsi ini masih jauh dari sempurna, untuk itu kritik dan saran yang membangun penulis harapkan demi kesempurnaan Skripsi ini. Semoga Skripsi ini dapat bermanfaat bagi semua pihak.
Bogor, Mei 2012
ix
DAFTAR ISI
Halaman
DAFTAR TABEL ... xi
DAFTAR GAMBAR ... xii
DAFTAR LAMPIRAN ... xiv
1. PENDAHULUAN ... 1
1.1.Latar Belakang ... 1 1.2.Tujuan ... 3
2. TINJAUAN PUSTAKA ... 4 2.1.Telemetri Radio ... …… 4 2.2.GPS ... 5 2.4.Motor DC ... 6 2.5.Kamera CCTV ... 8
3. METODE PENELITIAN ... 10 3.1Waktu dan Lokasi Penelitian ... 10 3.2.Alat dan Bahan ... 10 3.3.Proses Pembuatan Low Altitude Observation Camera (LAOC) 12 3.4.Rancangan Alat ... 13 3.5.Perancangan Mekanik, Elektronik dan Pembuatan Software .. 15 3.5.1. Perancangan Mekanik ... 15 3.5.2. Perancangan Elektonika ... 19 3.5.2.1. Elektronika GPS dan YS1020UB ... 19 3.5.2.2. Elektronika Kamera CCTV ... 23 3.5.2.3. Elektronika Motor Wiper Penggerak LAOC ... 24 3.5.2.4. Elektronika Komponene GPS dan Kamera ... CCTV pada LAOC ... 26 3.5.3. Mekanisme Pembuatan Software ... 28
3.5.3.1. Pembuatan Software Google Sketh Up 7 ... 28 3.5.3.2. Pembuatan Software Eagle ... 28 3.5.3.3. Software Terminal.Exe ... 29 3.6. Proses Pembuatan Hasil Akhir ... 30 3.7. Bahasa NMEA-0813 pada GPS tipe PMB-648 ... 30 3.8. Perhitungan Laju Alat LAOC ... 32
DAFTAR PUSTAKA ... 54
LAMPIRAN ... 56
xi
DAFTAR TABEL
Halaman
1. Spektrum radio ... 5 2. Daftar alat yang digunakan untuk pembuatan LAOC ... 10 3. Daftar bahan yang digunakan dalam pembuatan LAOC ... 11 4. Daftar program yang digunakann dalam pembuatan LAOC ... 12 5. Spesifikasi data pada GPS PMB-648 ... 23 6. Spesifikasi motor wiper ... 24 7. Contoh pengambilan data bertempat di Fakultas Perikanan dan Ilmu
Kelautan ... 44 8. Data GPS pada uji coba di lantai 4 gedung Ilmu dan Teknologi
1. Bagian-bagian dari motor wiper ... 7 2. Kamera CCTV ... 8 3. Tahapan pembuatan LAOC ... 13 4. Gambar desain alat LAOC ... 14 5. Desain alat (a) Tampak samping; (b) Tampak bawah ... 18 6. Rangkaian YS1020UB dan GPS PMB-648 ... 20 7. Rangkaian YS-1020UB dengan USBer Serial ... 21 8. Ilustrasi sistem pengiriman dan penerimaan data GPS ... 22 9. Sistem pentransmisian kamera CCTV melalui gelombang radio ... 24 10. Rangkaian motor wipper dan Remote Control ... 25 11. Rangkaian Kamera CCTV dan GPS ... 27 12. Tampilan Google Skecth Up ... 28 13. Tampilan Eagle 5.2.0 Light ... 29 14. Tampilan Terminal.exe ... 29 15. Diagram alir proses hasil akhir ... 30 16. Alat LAOC (Low Altitude Observation Camera) ... 35 17. Bagian dalam dari LAOC ... 36 18. YS-1020UB ... 38 19. (a) tampak depan GPS PMB-648 (b) tampak samping GPS PMB-648
xiii
23. Pin-pin pada J2 yang tertera pada USBer ... 42 24. Program Tampilan di layar PC atau Laptop dengan menggunakan
1
1.
PENDAHULUAN
1.1 Latar Belakang
Pengamatan secara langsung terhadap satwa liar sangat penting dalam metode untuk mempelajari beberapa aspek kehidupan seperti perilaku hewan tersebut atau pergerakannya, dalam melakukan pengamatan dilapangan sangat sulit dilakukan terutama untuk jenis hewan-hewan yang peka terhadap manusia, selain itu kawasan hutan mangrove sebagai wilayah penelitian yang sangat lebat dengan perakaran yang tinggi dan rapat sehingga membuat peneliti akan sulit untuk mengamati dan akan mengurangi ketelitian dan ketepatan hasil studi.
Kendala-kendala dalam pengamatan dilapangan ini dapat diperkecil dengan menggunakan metode pengukuran jarak jauh. Pengukuran jarak jauh ini disebut dengan telemetri yaitu sebuah teknologi yang melakukan pengukuran jarak jauh dan melaporkan informasi kepada perancang atau operator sistem. Sistem pengukuran jarak jauh ini dapat memakai gelombang radio atau RF untuk pengiriman data. Gelombang radio yang digunakan hanya sebagai sistem pemancar dan penerima dari data, data yang dikirim dapat berupa perekaman gambar, waktu, tanggal, maupun data-data penting yang terekam dari pemancar.
kabel ini akan dipasangkan diatas sarang dari burung dengan ketinggian diatas sarang yaitu 30 cm.
Low Altitude Observation atau observasi pada ketinggian yang rendah sudah banyak dilakukan, salah satunya Low Altitude Satelite observation yang diakukan oleh Lockwood et al (2001) penelitian ini dilakukan untuk mengamati pergerakan poleward oleh sistem satelit yang melewati Ionospher. Sedangkan, penelitian yang dilakukan Nemec et al (2008) melakukan penelitian tentang pengukuran intensitas gempa bumi dengan ketinggian satelit yang rendah yaitu sekitar 700 km.
Donoghue (2009) menyatakan bahwa sudah banyak peneliti yang melakukan penelitian Low Altitude Observation ini seperti yang dilakukan oleh Dugdale (2007) dengan menggunakan smartplane untuk melihat zona pasang surut, selain itu Lejot et al (2006) menggunakan Pixy Drone untuk memetakan batimetri. Low Altitude Observation ini memerlukan kamera sebagai
penggambaran lokasi dan wilayah, untuk pengamatan diperlukan kamera yang berbeda-beda seperti yang dilakukan oleh Wundram dan Luffler (2008) untuk monitoring vegetasi menggunakan kamera berjenis Nixon Coolpix (4MP) RGB, sedangkan Dugdale (2007) untuk pengamatan zona pasang surut menggunakan dua kamera dengan jenis Canon IXUS 60 (6MP) RGB dan Canon IXUS (5MP) NIR.
memiliki berat hingga mencapai 15 kg, alat ini diciptakan oleh Gareth Brown pada tahun 1984.
Kepiting bakau merupakan salah satu kepiting yang habitatnya berada diwilayah hutan mangrove. Tingkah laku dari kepiting ini seringkali sulit diamati sebab kepiting ini sangat peka terhadap keberadaan manusia. Sedangkan, kepiting ini memiliki peranan yang sangat penting dalam ekosistem hutan mangrove. Kepiting ini memiliki peranan yang sangat penting, salah satu peranan kepiting bakau ini yaitu mengurai daun mangrove yang jatuh sehingga penguraian lebih cepat. Penguraian ini dilakukan oleh kepiting dengan memakan dedaunan mangrove, selain itu lubang-lubang tempat tinggal kepiting ini dapat mengurangi kadar racun tanah mangrove yang terkenal anoksik.
1.2 Tujuan
2. TINJAUAN PUSTAKA
2.1 Telemetri Radio
Telemetri merupakan sistem untuk pengumpulan data yang dilakukan disuatu tempat terpencil atau sukar dan mengerjakannya sehingga data tersebut dapat dievaluasi, sistem ini menggunakan sistem komunikasi (Carden, et al, 2002). Menurut Rochani (2007) Telemetri merupakan suatu cara pengukuran data jarak jauh yang menggunakan sarana telekomunikasi dimana pada penelitiannya menggunakan sistem telemetri sebagai early warning sistem. Sistem telemetri dilihat dari sistem pemancaran dibagi menjadi dua yaitu: sistem telemetri melalui kabel, biasanya pengiriman melalui kabel atau kawat penghantar dimana
kecepatannya mendekati kecepatan cahaya (Prayitno, 1997 in Utari, 2010), kedua yaitu sistem telemetri radio adalah suatu proses yang digunakan untuk mengukur atau mencatat suatu besaran fisik pada suatu lokasi yang letaknya jauh dari pusat pengolahan hasil pengukuran (Sulistiyanti, 2008).
Sistem telemetri dengan menggunakan frekuensi radio memiliki beberapa keunggulan yaitu memiliki probabilitas yang kecil, peralatan pemancaran yang ringan dan jangkauan pemancaran yang jauh (Sulistiyanti, 2008). Gelombang radio yang dipancarkan biasanya memmiliki frekuensi sangat lebar dari sekitar 10 kHZ sampai dengan 300 GHz dalam spektrum elektromagnetik. Gelombang radio digolongkan dalam daerah-daerah yang lebih kecil, tabel 1 merupakan
Tabel 1. Spektrum radio (sumber: Chattopadhyay, 1989).
Nama Pita Daerah
Frekuensi
Daerah Panjang Gelombang
Kegunaan
Frekuensi Sangat
Rendah (VLF)
10 – 30 kHZ 30-10 km Komunikasi langsung jarak jauh
Frekuensi Rendah
(LF)
30 - 300 kHZ 10-1 km Angkatan Laut, Udara
Frekuensi Medium
(MF)
300 kHZ-3 MHz 1 km – 100 m Siaran Radio
Frekuensi Tinggi (HF) 3 - 30 MHz 100 – 10 m Semua jenis radio
Frekuensi Sangat
Tinggi (VHF)
30 – 300 MHz 10 -1 m Komunikasi TV, radar, FM, gelomban g Pendek
Frekuensi Ultra Tinggi (UHF)
300 MHz- 3 GHz
1m – 10 cm Radar, komunika si
gelomban g miro
Frekuensi Super
Tinggi (SHF)
3 - 30 GHz 10 cm – 1 cm Radar,
pengulang radio, komunika si laut
Frekuensi Amat Tinggi (EHF)
30 -300 GHz 1 cm – 1mm Eksperimental
2.2 GPS (Global Positioning System)
yaitu 24 satelit, 6 satelit mengelilingi bumi dengan sebaran yang telah diatur. Satelit pada GPS memiliki rata-rata ketinggian 20.200 km diatas permukaan bumi, satelit ini biasanya memiliki berat 8000 kg bergerak dengan kecepatan sekitar 4 km/ detik dan memiliki periode 11 jam 58 menit (Longsdom, 1995).
Satelit GPS memancarkan sinyal untuk memberitahukan posisi satelit GPS yang bersangkutan serta jaraknya dari pengamat lengkap dengan informasi
waktunya, sinyal GPS juga digunakan untuk menginformasikan kondisi satelit pada pengamat (Widodo, 2009).
Satelit GPS beroperasi dengan menggunakan sistem waktunya sendiri, sistem waktu ini biasanya didefinisikan jam-jam atom yang berada disetiap satelit GPS, sistem waktu GPS adalah sistem waktu berskala kontinyu yang
didefinisikan oleh jam atom utama yang berada di Master Control Station (MCS) GPS di Colorado Springs. Sistem waktu GPS ini bereferensi ke sistem UTC (Universal Time Coordinated) yang dikelola oleh USNO (United States Naval Observatory), dan keduanya mempunyai hubungan yang terdefinisi secara teliti sampai tingkat 1 milidetik (Widodo, 2009).
2.3 Motor DC
Motor arus searah digunakan dimana kontrol torsi dan kecepatan dengan r