DINAMIKA ORDE PERTAMA SISTEM NONLINIER TERKOPEL
DENGAN RELASI PREDASI, MUTUAL, DAN SIKLIK
(Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi)
Oleh:
MADA SANJAYA WS
G74103018
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRAK
Mada Sanjaya WS. Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi). Dibimbing oleh Husin Alatas.
DINAMIKA ORDE PERTAMA SISTEM NONLINIER TERKOPEL
DENGAN RELASI PREDASI, MUTUAL DAN SIKLIK
(Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi)
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains Pada Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
Oleh :
MADA SANJAYA WS
G74103018
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul : Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi).
Nama : Mada Sanjaya WS NIM : G74103018
Menyetujui :
Pembimbing I
Dr. Husin Alatas, M.Si NIP 132206234
Mengetahui :
Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor
Prof. Dr. Ir. Yonny Koesmaryono, MS. NIP 131473999
RIWAYAT HIDUP
Penulis dilahirkan di Cirebon, pada tanggal 11 Oktober 1985 sebagai anak kedua dari tiga bersaudara, pasangan Waryano Sunaryo dan Eti.
Penulis menyelesaikan studinya di SMU Negeri 1 Lemah Abang-Cirebon pada tahun 2003 dan pada tahun yang sama diterima di Institut Pertanian Bogor (IPB) melalui jalur Undangan Seleksi Masuk IPB (USMI). Penulis terdaftar sebagai mahasiswa Departemen Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan taufik dan hidayah-Nya, sehingga penulis dapat menyelesaikan proposal yang berjudul “Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi).”, yang dilakukan dalam rangka tugas akhir untuk memperoleh gelar Sarjana Sains pada Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
Pada kesempatan ini, penulis mengucapkan banyak terima kasih dan memberikan penghargaan yang sebesar-besarnya kepada Bapak Husin Alatas atas segala bimbingan dan motivasinya yang diberikan kepada penulis untuk segera menyelesaikan penelitian ini, juga kepada Bapak Irzaman dan Bapak Kiagus Dahlan selaku penguji dari skripsi ini. Kepada orangtua dan seluruh sanak keluarga penulis, juga kepada “Dinda yang selalu berada di hatiku”, seluruh staff dan dosen Fisika khususnya, dan IPB pada umumnya. Serta seluruh pihak yang telah membantu penulis yang tak mungkin disebutkan satu-persatu, juga kepada semua teman-teman seperjuangan Fisika.
Penulis memahami bahwa tiada gading yang tak retak. Oleh karena itu, segala macam saran dan kritik yang membangun akan penulis terima dengan senang hati. Semoga apa yang disampaikan oleh penulis akan bermanfaat bagi ilmu pengetahuan.
Bogor, Maret 2007
DAFTAR ISI
KATA
PENGANTAR... i
DAFTAR ISI... ii
DAFTAR GAMBAR... iv
DAFTAR TABEL... vi
DAFTAR LAMPIRAN... vii
PENDAHULUAN... . 1 Latar Belakang... 1
Tujuan... 1
TINJAUAN PUSTAKA... 1
Persamaan Differensial Orde Pertama... 1
Model Dinamik untuk Interaksi Multispesies... 1
Titik Kritis (critical point)... 2
Kontruksi Matrik Jacobi... 2
Vektor Eigen dan Nilai Eigen... 2
Model Dinamik Lotka-Volterra Dua Spesies... 2
Analisis Model Dinamik untuk Interaksi Dua Spesies... 3
Kontruksi Matriks Jacobi ... 3
Analisis Kestabilan Titik Kritis... 3
Titik Kritis T1 ... 3 Titik Kritis T2 ... 3
Orbit dan Kestabilan Sistem... 3
Kesesuaian Model dengan Hasil Pengamatan Lapangan... 4
METODOLOGI PENELITIAN... 4
Waktu dan Tempat Penelitian... 4
Peralatan ... 4
Studi Pustaka ... 4
Pembuatan Program... 4
Analisis Output………...…... 4
HASIL DAN PEMBAHASAN………...……… 5
PEMODELAN………...….…… … 5 Model Dinamik untuk Interaksi Dua Spesies Mutualistik………...……… 5
Model Dinamik untuk Interaksi Dua Spesies Mutualistik dengan Kehadiran Pemangsa………... ... 5
Model Dinamik Dua mangsa Satu Pemangsa tanpa Kompetisi Intraspesifik... 5
Model Dinamik Dua mangsa Satu Pemangsa dengan Kompetisi Intraspesifik... 6
Model Dinamik Rantai Makanan Siklik………... 6
ANALISIS MODEL………...…… 6
Model Dinamik untuk Interaksi Dua Spesies Mutualistik………...… 6
Penentuan Titik Kritis………...……. 6
Kontruksi Matriks Jacobi... 7
Analisis Kestabilan Titik Kritis... 7
Titik Kritis T1... 7
Titik Kritis T2... 7
Titik Kritis T3... 7
Titik Kritis T4... 8
Orbit dan Kestabilan Sistem... 8
Penentuan Titik Kritis... 10
Kontruksi Matriks Jacobi... 10
Analisis Kestabilan Titik Kritis... 11
Titik Kritis T1... 11
Titik Kritis T2... 11
Titik Kritis T3... 11
Titik Kritis T4... 11
Titik Kritis T5... 12
Titik Kritis T6... 16
Model Dinamik Dua mangsa Satu Pemangsa tanpa Kompetisi Intraspesifik... 19
Penentuan Titik Kritis... 19
Kontruksi Matriks Jacobi... 19
Analisis Kestabilan Titik Kritis... 19
Titik Kritis T1... 19
Titik Kritis T2... 20
Titik Kritis T3... 20
Hasil Numerik... 20
Kasus ad = bc………...….…… 20
Kasus ad > bc………..….…… 20
Kasus ad < bc... 21
Model Dinamik Dua mangsa Satu Pemangsa dengan Kompetisi Intraspesifik... 24
Penentuan Titik Kritis... 24
Kontruksi Matriks Jacobi... 24
Analisis Kestabilan Titik Kritis... 24
Titik Kritis T1... 24
Titik Kritis T2... 24
Titik Kritis T3... 25
Titik Kritis T4... 25
Titik Kritis T5... 25
Titik Kritis T6... 25
Titik Kritis T7... 26
Hasil Numerik... 26
Parameter 1………...…………... 26
Parameter 2………...………... 26
Parameter 3... 26
Attractor Model Dinamik Dua Mangsa Satu Pemangsa………...……… 29
Hasil Eksperimen Lapangan... 30
Model Dinamik Rantai Makanan Siklik... 32
Penentuan Titik Kritis... 32
Kontruksi Matriks Jacobi... 32
Analisis Kestabilan Titik Kritis... 35
Hasil Numerik... 35
Kasus beh = fic... 35
Kasus beh > fic... 36 Kas Aplikasi Model Dinamik Pengendalian Hama pertanian... 38
Analisis Model Dinamik Pengendalian Hama pertanian... 39
Penentuan Titik Kritis... 39
Kontruksi Matriks Jacobi... 39
Analisis Kestabilan Titik Kritis... 40
Hasil Numerik... 40
Kasus ag = fb... 40
Kasus ag > fb... 41
Kasus ag < fb... 42
SIMPULAN DAN SARAN... 43
DAFTAR PUSTAKA... 43
Gambar 1. Dinamika populasi dua
spesies... 3
Gambar 2. Orbit kestabilan mangsa pemangsa dua
spesies... 4 Gambar 3. Dinamika Populasi Hare dan Lynx oleh Hudson Bay
Company... 4 Gambar 4. Orbit Kestabilan Populasi Hare’s dan Lynx oleh Hudson Bay
Company………...
... 4 Gambar 5. (a) Grafik ruang phasa bidang xy dengan kondisi awal x = 1 dan y = 1 (b)
Grafik laju populasi dengan kondisi awal x = 1 dan y =
1... 8 Gambar 6. Grafik kestabilan titik kritis T4 saat ad > bc (a) ruang phasa bidang xy
dengan memvariasikan kondisi awal dan t = 100 (a) laju populasi kondisi awal x = 2 dan y = 2 (b) laju populasi kondisi awal, x = 1 dan y = 2, dan (c) laju populasi kondisi awal x = 2 dan y =
1... 9 Gambar 7. (a) Grafik ruang phasa bidang xy dengan kondisi awal x = 1 dan y = 1 dan
(b) grafik laju perubahan populasi dengan kondisi awal x = 1 dan y =
1... 10 Gambar 8. Grafik ruang phasa titik kritis T4 dengan kondisi awal x = 1, y = 1, z = 1, t
= 1000 dan parameter a = 2.5, b = 1, c = 1, dan d =
2.5... 11 Gambar 9. Grafik ruang phasa dengan kondisi awal x = 1 dan y =
1... 12 Gambar 10. Grafik ruang phasa titik kritis T4 dengan kondisi awal x = 1, y = 1, z = 1, t =
1000 dan parameter a = 0.5, b = 1, c = 1 dan d =
0.5... 12 Gambar 11. Grafik ruang phasa dengan kondisi awal x = 1 dan y =
1... 12 Gambar 12. Bifurkasi yang terjadi pada titik kritis T5 dengan t = 1000 dan memvariasikan
parameter yang digunakan, (a) parameter d = 1.5 dan l = 1.5 (b) parameter d = 1.2 dan l = 1.2 (c) parameter d =1 dan l = 1 (d) parameter d = 0.7 dan l = 0.7 (e) parameter d = 0.5 dan l = 0.5 serta (f) parameter d = 0.3
dan l = 0.3……….. 14
Gambar 13. Grafik Laju Perubahan Populasi pada Titik Kritis T5 dengan beberapa parameter, (a) parameter d = 1.5 dan l = 1.5 (b) parameter d = 1.2 dan l = 1.2 (c) parameter d = 1 dan l = 1 (d) parameter d = 0.7 dan l = 0.7 (e) parameter d = 0.5 dan l = 0.5 serta (f) parameter d = 0.3 dan l =
0.3……… 15 Gambar 14. Bifurkasi yang terjadi pada titik kritis T6 dengan t = 1000 dan
memvariasikan parameter yang digunakan, (a) parameter b = 0.1 dan c = 0.1 (b) parameter b = 0.5 dan c = 0.5 (c) parameter b = 0.8, c = 0.8 (d) parameter b = 1 dan c = 1 (e) parameter b = 1.1 dan c = 1.1 serta (f)
parameter b = 1.2 dan c = 1.2………. 17
Gambar 15. Grafik Laju Perubahan Populasi pada Titik Kritis T6 dengan beberapa parameter, (a) parameter b = 0.1 dan c = 0.1 (b) parameter b = 0.5 dan c = 0.5 (c) parameter b = 0.8 , c = 0.8 (d) parameter b = 1 dan c = 1 (e) parameter b = 1.1 dan c = 1.1 serta (f) parameter b = 1.2 dan c =
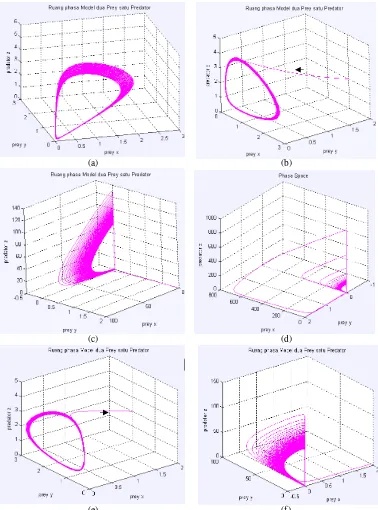
1.2……….. 18 Gambar 16. Bifurkasi yang terjadi pada model dua mangsa satu predator dengan t =
500 dan memvariasikan parameter yang digunakan, (a) parameter a = 1, b = 1, c = 1 dan d = 1 (b) parameter a = 2, b = 1, c = 1 dan d = 2 (c) parameter a = 20, b = 1, c = 1 dan d = 20 (e) parameter a = 1, b = 2, c = 2 dan d = 1 (f) parameter a = 1, b = 20, c = 20, dan d =
1……… 22 Gambar 17. Grafik Laju Perubahan Populasi pada model dua mangsa satu predator
parameter a = 20, b = 1, c = 1 dan d = 20 (e) parameter a = 1, b = 2, c = 2 dan d =1 (f) parameter a = 1, b = 20, c = 20 dan d =
1... 23 Gambar 18. Bifurkasi yang terjadi pada titik kritis T7 dengan t = 1000 dan
memvariasikan parameter yang digunakan, (a) bersifat periodik dengan c = 0.003 (b) bersifat periodik dengan c = 0.004 (c) bersifat periodik dengan c = 0.005 (d) bersifat periodik dengan c = 0.006 (e) bersifat periodik dengan c = 0.007 serta (f) bersifat chaotik dengan c =
0.008... 27 Gambar 19. Laju Perubahan populasi yang terjadi pada titik kritis T7 dengan
memvariasikan parameter yang digunakan, (a) laju populasi tiga spesies dengan c = 0.003 (b) populasi tiga spesies dengan c = 0.005 (c) populasi tiga spesies dengan c = 0.008 (d) Plot x dan z terhadap waktu t dengan c = 0.003 bersifat periodik (e) Plot x dan z terhadap waktu t dengan c = 0.005 bersifat periodik (f) Plot x dan z terhadap waktu t dengan c =
0.008 bersifat chaotik... 28 Gambar 20. Attractor model dinamik dua mangsa satu pemangsa dengan kondisi awal
populasi predator divariasikan z0 = 2, z0 = 2.1 dan z0 = 2.2 sedangkan parameter c = 0.01 (a) ruang fase tiga spesies t = 3000, (b) laju populasi mangsa x, (c) laju populasi mangsa y dan (d) laju populasi pemangsa
z…………... 29
Gambar 21. Attractor model dinamik dua mangsa satu pemangsa saat kondisi awal populasi predator divariasikan z0 = 2, z0 = 2.1 dan z0 = 2.2 sedangkan parameter c = 0.01 (a) ruang fase tiga spesies, t = 3000 (b) ruang fase bidang xy, (c) ruang fase bidang yz dan (d) ruang fase bidang
xz... 30 Gambar 22. Hasil Experimental Dinamika Populasi sistem chemostat bacteria–
ciliate... 31
Gambar 23. Bifurkasi ruang phasa pada model siklik dengan t = 10 dan memvariasikan parameter yang digunakan, (a) parameter c =0.6 (b) parameter c = 0.8 (c) parameter c = 0.96 (d) parameter c =1. 2 (e) parameter c = 1.35 (f)
parameter c = 1.6………... 33
Gambar24. Laju perubahan populasi pada model siklik dengan memvariasikan parameter yang digunakan ,(a) parameter c = 0.6 (b) parameter c = 0.8 (c) parameter c = 0.96 (d) parameter c = 1. 2 (e) parameter c = 1.35 (f) parameter c =
1.6………. 34 Gambar 25. Skema daur hidup hama ulat buah (Helicoverpa armigera) yang merusak
tanaman kapas beserta musuh
alaminya... 38
Gambar 26. Diagram rantai makanan pada tanaman
kapas... 39 Gambar 27. Orbit kestabilan pada bidang 3-dimensi kasus ag =
fb... 40
Gambar 28. Dinamika populasi tiga spesies dengan nilai awal x = 1, y = 1, z = 1.5 dan t
= 20 kasus ag =
fb... 41 Gambar 29. Orbit kestabilan pada bidang 3-dimensi kasus ag >
fb... 41 Gambar 30. Dinamika populasi tiga spesies dengan nilai awal x = 2, y = 2, z = 1 dan t =
20 kasus ag >
fb...
.... 41
Gambar 31. Orbit Kestabilan pada bidang 3-dimensi kasus ag <
fb.... 42
Gambar 32. Dinamika populasi tiga spesies dengan nilai awal x = 2 , y = 2, z = 1 dan t =
20 kasus ag <
fb...
DINAMIKA ORDE PERTAMA SISTEM NONLINIER TERKOPEL
DENGAN RELASI PREDASI, MUTUAL, DAN SIKLIK
(Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi)
Oleh:
MADA SANJAYA WS
G74103018
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
ABSTRAK
Mada Sanjaya WS. Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi). Dibimbing oleh Husin Alatas.
DINAMIKA ORDE PERTAMA SISTEM NONLINIER TERKOPEL
DENGAN RELASI PREDASI, MUTUAL DAN SIKLIK
(Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi)
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains Pada Fakultas Matematika dan Ilmu Pengetahuan Alam
Institut Pertanian Bogor
Oleh :
MADA SANJAYA WS
G74103018
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
INSTITUT PERTANIAN BOGOR
Judul : Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi).
Nama : Mada Sanjaya WS NIM : G74103018
Menyetujui :
Pembimbing I
Dr. Husin Alatas, M.Si NIP 132206234
Mengetahui :
Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Pertanian Bogor
Prof. Dr. Ir. Yonny Koesmaryono, MS. NIP 131473999
RIWAYAT HIDUP
Penulis dilahirkan di Cirebon, pada tanggal 11 Oktober 1985 sebagai anak kedua dari tiga bersaudara, pasangan Waryano Sunaryo dan Eti.
Penulis menyelesaikan studinya di SMU Negeri 1 Lemah Abang-Cirebon pada tahun 2003 dan pada tahun yang sama diterima di Institut Pertanian Bogor (IPB) melalui jalur Undangan Seleksi Masuk IPB (USMI). Penulis terdaftar sebagai mahasiswa Departemen Fisika, Fakultas Matematika dan Ilmu Pengetahuan Alam.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan taufik dan hidayah-Nya, sehingga penulis dapat menyelesaikan proposal yang berjudul “Dinamika Orde Pertama Sistem Nonlinier Terkopel dengan Relasi Predasi, Mutual, dan Siklik (Tinjauan Kasus Mangsa-Pemangsa pada Sistem Ekologi).”, yang dilakukan dalam rangka tugas akhir untuk memperoleh gelar Sarjana Sains pada Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam, Institut Pertanian Bogor.
Pada kesempatan ini, penulis mengucapkan banyak terima kasih dan memberikan penghargaan yang sebesar-besarnya kepada Bapak Husin Alatas atas segala bimbingan dan motivasinya yang diberikan kepada penulis untuk segera menyelesaikan penelitian ini, juga kepada Bapak Irzaman dan Bapak Kiagus Dahlan selaku penguji dari skripsi ini. Kepada orangtua dan seluruh sanak keluarga penulis, juga kepada “Dinda yang selalu berada di hatiku”, seluruh staff dan dosen Fisika khususnya, dan IPB pada umumnya. Serta seluruh pihak yang telah membantu penulis yang tak mungkin disebutkan satu-persatu, juga kepada semua teman-teman seperjuangan Fisika.
Penulis memahami bahwa tiada gading yang tak retak. Oleh karena itu, segala macam saran dan kritik yang membangun akan penulis terima dengan senang hati. Semoga apa yang disampaikan oleh penulis akan bermanfaat bagi ilmu pengetahuan.
Bogor, Maret 2007
DAFTAR ISI
KATA
PENGANTAR... i
DAFTAR ISI... ii
DAFTAR GAMBAR... iv
DAFTAR TABEL... vi
DAFTAR LAMPIRAN... vii
PENDAHULUAN... . 1 Latar Belakang... 1
Tujuan... 1
TINJAUAN PUSTAKA... 1
Persamaan Differensial Orde Pertama... 1
Model Dinamik untuk Interaksi Multispesies... 1
Titik Kritis (critical point)... 2
Kontruksi Matrik Jacobi... 2
Vektor Eigen dan Nilai Eigen... 2
Model Dinamik Lotka-Volterra Dua Spesies... 2
Analisis Model Dinamik untuk Interaksi Dua Spesies... 3
Kontruksi Matriks Jacobi ... 3
Analisis Kestabilan Titik Kritis... 3
Titik Kritis T1 ... 3 Titik Kritis T2 ... 3
Orbit dan Kestabilan Sistem... 3
Kesesuaian Model dengan Hasil Pengamatan Lapangan... 4
METODOLOGI PENELITIAN... 4
Waktu dan Tempat Penelitian... 4
Peralatan ... 4
Studi Pustaka ... 4
Pembuatan Program... 4
Analisis Output………...…... 4
HASIL DAN PEMBAHASAN………...……… 5
PEMODELAN………...….…… … 5 Model Dinamik untuk Interaksi Dua Spesies Mutualistik………...……… 5
Model Dinamik untuk Interaksi Dua Spesies Mutualistik dengan Kehadiran Pemangsa………... ... 5
Model Dinamik Dua mangsa Satu Pemangsa tanpa Kompetisi Intraspesifik... 5
Model Dinamik Dua mangsa Satu Pemangsa dengan Kompetisi Intraspesifik... 6
Model Dinamik Rantai Makanan Siklik………... 6
ANALISIS MODEL………...…… 6
Model Dinamik untuk Interaksi Dua Spesies Mutualistik………...… 6
Penentuan Titik Kritis………...……. 6
Kontruksi Matriks Jacobi... 7
Analisis Kestabilan Titik Kritis... 7
Titik Kritis T1... 7
Titik Kritis T2... 7
Titik Kritis T3... 7
Titik Kritis T4... 8
Orbit dan Kestabilan Sistem... 8
Penentuan Titik Kritis... 10
Kontruksi Matriks Jacobi... 10
Analisis Kestabilan Titik Kritis... 11
Titik Kritis T1... 11
Titik Kritis T2... 11
Titik Kritis T3... 11
Titik Kritis T4... 11
Titik Kritis T5... 12
Titik Kritis T6... 16
Model Dinamik Dua mangsa Satu Pemangsa tanpa Kompetisi Intraspesifik... 19
Penentuan Titik Kritis... 19
Kontruksi Matriks Jacobi... 19
Analisis Kestabilan Titik Kritis... 19
Titik Kritis T1... 19
Titik Kritis T2... 20
Titik Kritis T3... 20
Hasil Numerik... 20
Kasus ad = bc………...….…… 20
Kasus ad > bc………..….…… 20
Kasus ad < bc... 21
Model Dinamik Dua mangsa Satu Pemangsa dengan Kompetisi Intraspesifik... 24
Penentuan Titik Kritis... 24
Kontruksi Matriks Jacobi... 24
Analisis Kestabilan Titik Kritis... 24
Titik Kritis T1... 24
Titik Kritis T2... 24
Titik Kritis T3... 25
Titik Kritis T4... 25
Titik Kritis T5... 25
Titik Kritis T6... 25
Titik Kritis T7... 26
Hasil Numerik... 26
Parameter 1………...…………... 26
Parameter 2………...………... 26
Parameter 3... 26
Attractor Model Dinamik Dua Mangsa Satu Pemangsa………...……… 29
Hasil Eksperimen Lapangan... 30
Model Dinamik Rantai Makanan Siklik... 32
Penentuan Titik Kritis... 32
Kontruksi Matriks Jacobi... 32
Analisis Kestabilan Titik Kritis... 35
Hasil Numerik... 35
Kasus beh = fic... 35
Kasus beh > fic... 36 Kas Aplikasi Model Dinamik Pengendalian Hama pertanian... 38
Analisis Model Dinamik Pengendalian Hama pertanian... 39
Penentuan Titik Kritis... 39
Kontruksi Matriks Jacobi... 39
Analisis Kestabilan Titik Kritis... 40
Hasil Numerik... 40
Kasus ag = fb... 40
Kasus ag > fb... 41
Kasus ag < fb... 42
SIMPULAN DAN SARAN... 43
DAFTAR PUSTAKA... 43
Gambar 1. Dinamika populasi dua
spesies... 3
Gambar 2. Orbit kestabilan mangsa pemangsa dua
spesies... 4 Gambar 3. Dinamika Populasi Hare dan Lynx oleh Hudson Bay
Company... 4 Gambar 4. Orbit Kestabilan Populasi Hare’s dan Lynx oleh Hudson Bay
Company………...
... 4 Gambar 5. (a) Grafik ruang phasa bidang xy dengan kondisi awal x = 1 dan y = 1 (b)
Grafik laju populasi dengan kondisi awal x = 1 dan y =
1... 8 Gambar 6. Grafik kestabilan titik kritis T4 saat ad > bc (a) ruang phasa bidang xy
dengan memvariasikan kondisi awal dan t = 100 (a) laju populasi kondisi awal x = 2 dan y = 2 (b) laju populasi kondisi awal, x = 1 dan y = 2, dan (c) laju populasi kondisi awal x = 2 dan y =
1... 9 Gambar 7. (a) Grafik ruang phasa bidang xy dengan kondisi awal x = 1 dan y = 1 dan
(b) grafik laju perubahan populasi dengan kondisi awal x = 1 dan y =
1... 10 Gambar 8. Grafik ruang phasa titik kritis T4 dengan kondisi awal x = 1, y = 1, z = 1, t
= 1000 dan parameter a = 2.5, b = 1, c = 1, dan d =
2.5... 11 Gambar 9. Grafik ruang phasa dengan kondisi awal x = 1 dan y =
1... 12 Gambar 10. Grafik ruang phasa titik kritis T4 dengan kondisi awal x = 1, y = 1, z = 1, t =
1000 dan parameter a = 0.5, b = 1, c = 1 dan d =
0.5... 12 Gambar 11. Grafik ruang phasa dengan kondisi awal x = 1 dan y =
1... 12 Gambar 12. Bifurkasi yang terjadi pada titik kritis T5 dengan t = 1000 dan memvariasikan
parameter yang digunakan, (a) parameter d = 1.5 dan l = 1.5 (b) parameter d = 1.2 dan l = 1.2 (c) parameter d =1 dan l = 1 (d) parameter d = 0.7 dan l = 0.7 (e) parameter d = 0.5 dan l = 0.5 serta (f) parameter d = 0.3
dan l = 0.3……….. 14
Gambar 13. Grafik Laju Perubahan Populasi pada Titik Kritis T5 dengan beberapa parameter, (a) parameter d = 1.5 dan l = 1.5 (b) parameter d = 1.2 dan l = 1.2 (c) parameter d = 1 dan l = 1 (d) parameter d = 0.7 dan l = 0.7 (e) parameter d = 0.5 dan l = 0.5 serta (f) parameter d = 0.3 dan l =
0.3……… 15 Gambar 14. Bifurkasi yang terjadi pada titik kritis T6 dengan t = 1000 dan
memvariasikan parameter yang digunakan, (a) parameter b = 0.1 dan c = 0.1 (b) parameter b = 0.5 dan c = 0.5 (c) parameter b = 0.8, c = 0.8 (d) parameter b = 1 dan c = 1 (e) parameter b = 1.1 dan c = 1.1 serta (f)
parameter b = 1.2 dan c = 1.2………. 17
Gambar 15. Grafik Laju Perubahan Populasi pada Titik Kritis T6 dengan beberapa parameter, (a) parameter b = 0.1 dan c = 0.1 (b) parameter b = 0.5 dan c = 0.5 (c) parameter b = 0.8 , c = 0.8 (d) parameter b = 1 dan c = 1 (e) parameter b = 1.1 dan c = 1.1 serta (f) parameter b = 1.2 dan c =
1.2……….. 18 Gambar 16. Bifurkasi yang terjadi pada model dua mangsa satu predator dengan t =
500 dan memvariasikan parameter yang digunakan, (a) parameter a = 1, b = 1, c = 1 dan d = 1 (b) parameter a = 2, b = 1, c = 1 dan d = 2 (c) parameter a = 20, b = 1, c = 1 dan d = 20 (e) parameter a = 1, b = 2, c = 2 dan d = 1 (f) parameter a = 1, b = 20, c = 20, dan d =
1……… 22 Gambar 17. Grafik Laju Perubahan Populasi pada model dua mangsa satu predator
parameter a = 20, b = 1, c = 1 dan d = 20 (e) parameter a = 1, b = 2, c = 2 dan d =1 (f) parameter a = 1, b = 20, c = 20 dan d =
1... 23 Gambar 18. Bifurkasi yang terjadi pada titik kritis T7 dengan t = 1000 dan
memvariasikan parameter yang digunakan, (a) bersifat periodik dengan c = 0.003 (b) bersifat periodik dengan c = 0.004 (c) bersifat periodik dengan c = 0.005 (d) bersifat periodik dengan c = 0.006 (e) bersifat periodik dengan c = 0.007 serta (f) bersifat chaotik dengan c =
0.008... 27 Gambar 19. Laju Perubahan populasi yang terjadi pada titik kritis T7 dengan
memvariasikan parameter yang digunakan, (a) laju populasi tiga spesies dengan c = 0.003 (b) populasi tiga spesies dengan c = 0.005 (c) populasi tiga spesies dengan c = 0.008 (d) Plot x dan z terhadap waktu t dengan c = 0.003 bersifat periodik (e) Plot x dan z terhadap waktu t dengan c = 0.005 bersifat periodik (f) Plot x dan z terhadap waktu t dengan c =
0.008 bersifat chaotik... 28 Gambar 20. Attractor model dinamik dua mangsa satu pemangsa dengan kondisi awal
populasi predator divariasikan z0 = 2, z0 = 2.1 dan z0 = 2.2 sedangkan parameter c = 0.01 (a) ruang fase tiga spesies t = 3000, (b) laju populasi mangsa x, (c) laju populasi mangsa y dan (d) laju populasi pemangsa
z…………... 29
Gambar 21. Attractor model dinamik dua mangsa satu pemangsa saat kondisi awal populasi predator divariasikan z0 = 2, z0 = 2.1 dan z0 = 2.2 sedangkan parameter c = 0.01 (a) ruang fase tiga spesies, t = 3000 (b) ruang fase bidang xy, (c) ruang fase bidang yz dan (d) ruang fase bidang
xz... 30 Gambar 22. Hasil Experimental Dinamika Populasi sistem chemostat bacteria–
ciliate... 31
Gambar 23. Bifurkasi ruang phasa pada model siklik dengan t = 10 dan memvariasikan parameter yang digunakan, (a) parameter c =0.6 (b) parameter c = 0.8 (c) parameter c = 0.96 (d) parameter c =1. 2 (e) parameter c = 1.35 (f)
parameter c = 1.6………... 33
Gambar24. Laju perubahan populasi pada model siklik dengan memvariasikan parameter yang digunakan ,(a) parameter c = 0.6 (b) parameter c = 0.8 (c) parameter c = 0.96 (d) parameter c = 1. 2 (e) parameter c = 1.35 (f) parameter c =
1.6………. 34 Gambar 25. Skema daur hidup hama ulat buah (Helicoverpa armigera) yang merusak
tanaman kapas beserta musuh
alaminya... 38
Gambar 26. Diagram rantai makanan pada tanaman
kapas... 39 Gambar 27. Orbit kestabilan pada bidang 3-dimensi kasus ag =
fb... 40
Gambar 28. Dinamika populasi tiga spesies dengan nilai awal x = 1, y = 1, z = 1.5 dan t
= 20 kasus ag =
fb... 41 Gambar 29. Orbit kestabilan pada bidang 3-dimensi kasus ag >
fb... 41 Gambar 30. Dinamika populasi tiga spesies dengan nilai awal x = 2, y = 2, z = 1 dan t =
20 kasus ag >
fb...
.... 41
Gambar 31. Orbit Kestabilan pada bidang 3-dimensi kasus ag <
fb.... 42
Gambar 32. Dinamika populasi tiga spesies dengan nilai awal x = 2 , y = 2, z = 1 dan t =
20 kasus ag <
fb...
DAFTAR TABEL
Tabel 1. Nilai-nilai parameter yang digunakan dalam titik kritis T4 Model
Mutualisme... 11 Tabel 2. Nilai-nilai parameter yang digunakan dalam titik kritis T5 Model
Mutualisme... 12 Tabel 3. Nilai-nilai parameter yang digunakan dalam titik kritis T6 Model
Mutualisme... 16 Tabel 4. Nilai-nilai parameter yang digunakan dalam Model dua mangsa satu
pemangsa... 21 Tabel 5. Nilai-nilai parameter yang digunakan dalam Model Rantai Makanan
Siklik... 35 Tabel 6. Nilai-nilai parameter yang digunakan Rantai Makanan pada Tanaman
DAFTAR LAMPIRAN
Lampiran 1. Analisis Titik Kritis Model Dinamik Tiga
Spesies... 46 Lampiran 2. Analisis Nilai Eigen Model Dinamik Tiga
Spesies... 48 Lampiran 3. Sintaks Plot Grafik Dengan Software Matlab
7... 54 Lampiran 4. Diagram Alir
PENDAHULUAN
Latar Belakang
Salah satu cabang sains yang sedang berkembang dewasa ini adalah sains nonlinier. Dasar dari ilmu ini berpijak pada fakta bahwa gejala yang terjadi di alam secara umum tidak memenuhi prinsip linieritas, tetapi bersifat nonlinier.
Gejala nonlinier pertama kali diprediksi oleh Henri Poincare pada tahun 1880-an, ketika mencoba memecahkan permasalahan stabilitas dari suatu sistem dinamis, seperti gerak tiga benda langit di bawah pengaruh gaya gravitasi (rigid body problem). Pada tahun 1963 Edward Lorenz pertama kali menyelidiki gejala nonlinieritas pada sistem cuaca dengan menyederhanakan sistem cuaca yang kompleks ke bentuk persamaan yang sederhana dan berkelakuan chaotic. Gejala nonlinieritas ini dapat dianalisis melalui pendekatan system dinamik (dynamical system approach).
Selain dalam fisika, bidang lain yang terkait dengan gejala nonlinieritas antara lain adalah analisis populasi pada ekologi, analisis keuangan dalam ekonomi, reaksi kimia, ataupun analisis kriminalitas bahkan sifat nonlinieritas ini dapat dipakai juga untuk memprediksi banjir di suatu daerah dengan menggunakan asumsi tertentu. Dalam penelitian ini yang akan dikaji dengan lebih mendalam adalah fenomena nonlinieritas dalam suatu sistem ekologi.
Dengan memanfaatkan analisis sistem dinamik maka gejala nonlinieritas pada sistem ekologi dapat dipelajari dan diaplikasikan secara nyata untuk berbagai kepentingan. Pada penelitian ini akan dibahas beberapa model dinamik interaksi antara tiga spesies, yaitu interaksi dua spesies yang saling menguntungkan (Simbiosis Mutualisme) dengan kehadiran pemangsa, model dua mangsa satu pemangsa, dan model rantai makanan serta aplikasinya dalam proses pengendalian hama tanaman pertanian dengan mengembangkan musuh alaminya.
Tujuan
Penelitian ini bertujuan:
1) Mempelajari model dinamika nonlinier yang berlaku pada sistem simbiosis mutualisme, model dua mangsa satu pemangsa, dan model rantai makanan siklik.
2) Menganalisis kondisi kestabilan pada ketiga model dinamik tersebut. 3) Mengetahui bentuk kestabilan di sekitar titik kritisnya
4) Mengetahui arti fisis dari grafik yang diperoleh.
5) Mengaplikasikan model dinamik dalam pengendalian hama pada tumbuhan dengan mengembangkan musuh alaminya.
TINJAUAN PUSTAKA
1. Persamaan Differensial Orde Pertama
Sistem persamaan differensial orde pertama interaksi dua spesies dapat dinyatakan sebagai: 1
2 ( , )
( , ) dx
f x y dt
dy
f x y dt
=
=
(1)
Sedangkan untuk interaksi tiga spesies dapat dinyatakan sebagai:
1
2
3 ( , , )
( , , )
( , , ) dx
f x y z dt
dy
f x y z dt
dz
f x y z dt
=
=
=
(2)
2. Model Dinamik untuk Interaksi Multispesies
Generalisasi dari model dinamik Lotka-Voltera klasik dari n-spesies yang berinteraksi dapat dinyatakan dengan 1 , 1, 2,3.. n i
i i ij j
j dx
x r x
dt i
α
= ⎛ ⎞ = ⎜ + ⎟ ⎝ ⎠ =∑
(3)3. Titik Kritis (critical point)
Analisis sistem persamaan differensial sistem dua spesies sering digunakan untuk menentukan solusi yang tidak berubah terhadap waktu, yaitu untuk tiap
dx
/
dt
=
0
,
dy
/
dt
=
0
. Titik kritis ( * *,y
x ) dari sistem dapat diperoleh dengan menentukan
0 / , 0
/dt= dy dt=
dx (4)
Sedangkan untuk interaksi tiga spesies titik kritis (x y z*, *, ∗) dapat diperoleh dengan menentukan
/ 0, / 0, / 0
dx dt= dy dt= dz dt= (5)
4. Kontruksi Matrik Jacobi
Dengan melakukan pelinieran pada persamaan interaksi dua spesies maka diperoleh matriks Jacobi berikut ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = 2 2 1 2 2 1 1 1 x f x f x f x f
Ji (6)
Sedangkan untuk interaksi tiga spesies diperoleh matrik Jacobi
1 1 1
1 2 3
2 2 2
1 2 3
3 3 3
1 2 3
i
f f f
x x x
f f f
J
x x x
f f f
x x x
⎡∂ ∂ ∂ ⎤ ⎢∂ ∂ ∂ ⎥ ⎢ ⎥ ⎢∂ ∂ ∂ ⎥ = ⎢∂ ∂ ∂ ⎥ ⎢ ⎥ ⎢∂ ∂ ∂ ⎥ ⎢∂ ∂ ∂ ⎥ ⎣ ⎦ (7)
5. Vektor Eigen dan Nilai Eigen
Diberikan matrik dengan koefisien konstan J berukuran n×n dan SPD homogen berikut: Jx
x&= , x(0)=x0 (8)
Suatu vektor tak nol x dalam ruang ℜn disebut vektor eigen dari J jika untuk suatu skalar
λ
berlaku:x
Jx=
λ
(9)Nilai skalar
λ
dinamakan nilai eigen dari J.0 )
(J−λI x= (10)
Dengan I matrik diagonal satuan. Persamaan (10) mempunyai solusi tak nol jika dan hanya jika
0 )
det( )
( = J− I =J− I=
pλ λ λ (11)
Persamaan (11) disebut persamaan karakteristik dari matrik Jacobi. 5. Model Dinamik Lotka-Volterra Untuk Interaksi Dua Spesies
Model mangsa-pemangsa klasik yang telah banyak dikenal adalah model Lotka-Volterra untuk dua spesies, yaitu:
dxy cy dt dy
bxy ax dt dx
+ − =
− =
(12)
Keterangan:
a : menunjukkan kelahiran rata-rata dari mangsa tanpa adanya pemangsa. b : merupakan jumlah mangsa yang dimangsa oleh pemangsa.
c: menunjukkan angka kematian pemangsa secara alami tanpa pengaruh ada atau tidak adanya mangsa.
d : menunjukkan jumlah kelahiran dari pemangsa yang dipengaruhi oleh adanya mangsa. Pada model mangsa-pemangsa dua spesies di atas, misalkan x menyatakan banyaknya spesies sebagai mangsa di level pertama pada waktu t, y menyatakan banyaknya spesies sebagai pemangsa di level dua pada waktu t. Dari persamaan tersebut perubahan laju populasi spesies x dipengaruhi oleh tingkat reproduksi yaitu laju pertumbuhan alami spesies tersebut. Kemudian terjadi proses pemangsaan terhadap spesies x oleh spesies y, sehingga efek yang ditimbulkan dari pemangsaan tersebut akan mempengaruhi laju populasi spesies x. Perubahan laju populasi spesies y dipengaruhi oleh laju kematian alami yang terjadi tanpa kehadiran spesies x sebagai mangsanya. Laju pemangsaan spesies x juga bergantung pada kontak atau bertemunya mangsa dan pemangsa.
Ada lima tahap yang dilakukan untuk menganalisis kondisi kastabilan pada model tersebut antara lain:
1. menentukan titk kritis
2. mengkontruksi matrik komunitas (Jacobian) dan mengevaluasinya di titik kritis yang telah diperoleh. matrik komunitas menyatakan efek dari spesies ke-j terhadap spesies ke-i di sekitar titik kritisnya
3. Menentukan nilai eigen dan menganalisis kondisi kestabilan 4. Menentukan orbit kestabilan
5. Menafsirkan secara ekologis.
6. Analisis Model Dinamik untuk Interaksi Dua Spesies
Penentuan titik kritis
Sesuai persamaan (4) maka untuk interaksi dua spesies diperoleh:
0 ) (
0 ) (
= + −
= −
dx c y
by a x
(13)
Dari persamaan tersebut diperoleh dua titik kritis sebagai berikut:
) / , / (
) 0 , 0 (
2 1
b a d c T T
=
Kontruksi Matriks Jacobi
Dengan melakukan pelinieran pada persamaan (1) maka diperoleh matriks Jacobi:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + − − − = dx c dy bx by a
Ji (15)
Matriks komunitas diperoleh dengan mensubstitusikan titik kritis T1 dan T2 yang telah diperoleh ke dalam matriks Ji(15) yaitu:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = c a J 0 0
1 (16)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = 0 0 2 b da d bc J (17)
Analisis Kestabilan Titik kritis
Kondisi kestabilan dari setiap titik kritis dapat dianalisis dan dapat dilihat dari nilai eigennya. Berikut beberapa persamaan karakteristik untuk tiap titik kritis:
[
][
]
0) det( ) ( 1 1 = − − − = − = λ λ λ λ c a I J
P (18)
0 ) det( ) ( 2 2
2 = J − I = +ac=
P λ λ λ (19)
Titik kritis T1
Nilai eigen yang diperoleh dari persamaan (18) yaitu, λ1=a danλ2 =−c. Agar sistem di titik T1 stabil maka harus dipenuhi syarat
λ
1<0,λ
2<0. diketahui bahwa a dan c positif sehingga mengakibatkan λ1>0,λ2<0.(dua bilangan real dengan tanda berbeda). Sehingga dari hasil ini dapat disimpulkan bahwa tipe titik kritis T1 adalah titik sadel.Titik kritis T2
Nilai eigen yang diperoleh dari persamaan (19) yaitu, λ1,2 =± aci. Jadi pada titik kritis T2 nilai eigen merupakan konjugat kompleks, karena bagian realnya sama dengan nol maka dapat disimpulkan bahwa tipe titik kritis T2 adalah titik fokus (center point).
Orbit dan Kestabilan Sistem
Bentuk kestabilan orbit dan laju perubahan populasi dua spesies hasil simulasi model diperoleh:
Gambar 2. Orbit kestabilan mangsa pemangsa dua spesies
Kesesuaian Model Dengan Hasil Pengamatan Lapangan
Model mangsa Pemangsa Lotka- Volterra memprediksi suatu siklus periodik dengan perbedaan fase kecil antara populasi mangsa dengan pemangsa. Perilaku ini dapat dilihat dari pengamatan terkenal di Hudson bay Company yang mencatat jumlah mangsa kelinci (hare) dan pemangsa (lynx) dari tahun 1845-1935 berikut:
Gambar 3.Dinamika Populasi Hare dan Lynx oleh Hudson Bay Company
Gambar 4.Orbit kestabilan populasi Hare’s dan Lynx Oleh Hudson Bay Company
Secara kasar terlihat adanya kemiripan antara grafik model dinamika dua spesies dengan grafik dinamika populasi hasil observasi di alam.
METODOLOGI PENELITIAN
Waktu dan Tempat Penelitian
Peralatan
Peralatan yang digunakan dalam penelitian ini berupa komputer intel(R)Pentium(R) 4 CPU 3.00 GHz,512 MB of RAM. Software yang digunakan untuk proses komputasi adalah bahasa pemrograman Matlab 7.01 dari Mathwork, Inc.dan bahasa pemrograman Maple 9.5. Untuk mendukung penelitian ini sumber referensi yang digunakan selain buku (literature) juga informasi yang diperoleh dari internet yang dapat diakses dari Laboratorium.
Studi Pustaka
Studi pustaka diperlukan untuk mengetahui sejauh mana perkembangan yang telah dicapai dalam bidang yang diteliti.
Pembuatan Program
Pembuatan program dengan bahasa pemrograman Maple 9.5 dan Matlab 7.01 diperlukan untuk memudahkan perhitungan secara numerik maupun eksak juga memudahkan dalam pembuatan grafik solusi persamaan baik ruang fasenya maupun laju perubahan populasi pada model ekologi yang dibuat.
Analisis Output
Analisis output diperlukan untuk menguji apakah output yang didapat sesuai dengan teori yang ada dalam literatur. Sistematika penelitian yang lebih lengkap dapat dilihat pada lampiran 4.
HASIL DAN PEMBAHASAN
PEMODELAN
1. Model Dinamik untuk Interaksi Dua Spesies Mutualistik
Model ini mengasumsikan bahwa interaksi setiap spesies mendapat keuntungan karena berinteraksi dengan spesies yang lain. Tetapi kelangsungan hidup suatu populasi tidak bergantung pada interaksi itu (mutualisme facultatif). Sedangkan interaksi antar spesies yang sama dapat menurunkan laju pertumbuhan kedua populasi spesies, karena kedua spesies yang sama di dalam populasi berkompetisi untuk mendapatkan keuntungan dari spesies lain yang berbeda. Model tersebut dapat dinyatakan dalam bentuk persamaan logistik berikut:
0 , , 0 , ,. 1 , 0
) (
) (
≥ > < <
− + =
+ − =
c b d a k j
dy cx k y dt dy
by ax j x dt dx
(20)
Dengan,
a : besarnya laju penurunan pertumbuhan spesies x akibat bertambahnya satu individu spesies x di dalam populasi.
b : besarnya laju peningkatan pertumbuhan spesies x akibat bertambahnya satu individu spesies y di dalam populasi.
c : besarnya laju peningkatan pertumbuhan spesies y akibat bertambahnya satu individu spesies x di dalam populasi
d : besarnya laju penurunan pertumbuhan spesies y akibat bertambahnya satu individu spesies y di dalam populasi
j : laju pertumbuhan intrinsik spesies x. k : laju pertumbuhan intrinsik spesies y.
2. Model Dinamik untuk Interaksi Dua Spesies Mutualistik dengan kehadiran Pemangsa.
) ( ) ( ) ( fy l z dt dz ez dy cx k y dt dy by ax j x dt dx + − = − − + = + − = (21) 0 , , 0 , , , , 1 , ,
0< j k l< a d e f > bc≥ Dengan,
Dimana a, b, c, d, k dan l memiliki tafsiran seperti pada model (20)
e : besarnya laju penurunan spesies y akibat bertambahnya satu individu pemangsa z di dalam populasi.
f : besarnya laju peningkatan pertumbuhan pemangsa z akibat bertambahnya satu individu spesies y di dalam populasi.
l : laju penurunan intrinsik pemangsa z
3. Model Dinamik Dua Mangsa Satu Pemangsa tanpa Kompetisi Intraspesifik.
Untuk model dinamik dua mangsa satu pemangsa dapat dibentuk dengan Persamaan Lotka-Volterra yang dimodifikasi sebagai berikut:
gyz fxz ez dt dz dyz cy dt dy bxz ax dt dx + + − = − = − = (22) a,b,c,d,e,f,g >0 Dengan,
a : laju pertumbuhan intrinsik spesies x.
b : besarnya laju penurunan spesies x akibat bertambahnya satu individu pemangsa z di dalam populasi.
c : laju pertumbuhan intrinsik spesies y.
d : besarnya laju penurunan spesies x akibat bertambahnya satu individu pemangsa z di dalam populasi.
e : laju penurunan intrinsik pemangsa z.
f : besarnya laju peningkatan pertumbuhan pemangsa z akibat bertambahnya satu individu spesies x di dalam populasi.
g : besarnya laju peningkatan pertumbuhan pemangsa z akibat bertambahnya satu individu spesies y di dalam populasi.
4. Model Dinamik Dua Mangsa Satu Pemangsa dengan Kompetisi Intraspesifik.
Untuk model dinamik dua mangsa satu pemangsa dapat dibentuk dengan persamaan Lotka-Volterra yang dimodifikasi sesuai Model Gilpin (1979) sebagai berikut:
2
2 dx
jx ax bxy cxz dt
dy
ky dy exy fyz dt
dz
lz gxz hyz dt = − − − = − − − = − + + (23) Dengan,
j, k dan l memiliki tafsiran seperti pada model (21)
a : besarnya laju penurunan pertumbuhan spesies x akibat bertambahnya satu individu spesies x di dalam populasi.
b : besarnya laju penurunan pertumbuhan spesies x akibat bertambahnya satu individu spesies y di dalam populasi.
d : besarnya laju penurunan pertumbuhan spesies y akibat bertambahnya satu individu spesies y di dalam populasi.
e : besarnya laju penurunan spesies y akibat bertambahnya satu individu spesies x di dalam populasi.
f : besarnya laju penurunan spesies y karena pemangsaan oleh predator z.
g : besarnya laju peningkatan pertumbuhan pemangsa z akibat bertambahnya satu individu spesies x di dalam populasi.
h : besarnya laju peningkatan pertumbuhan pemangsa z akibat bertambahnya satu individu spesies y di dalam populasi.
5. Model Dinamik Rantai Makanan Siklik
Untuk model dinamik rantai makanan siklik dapat dibentuk dengan persamaan Lotka-Volterra yang dimodifikasi sebagai berikut:
ixz hyz gz dt dz
fyz exy dy dt dy
cxy bxz ax dt dx
− + =
− + =
− + =
(24)
Dengan,
a : laju pertumbuhan intrinsik spesies x.
b : besarnya laju peningkatan pertumbuhan spesies x akibat bertambahnya satu individu spesies z di dalam populasi.
c : besarnya laju penurunan spesies x akibat bertambahnya satu individu spesies y di dalam populasi.
d : laju pertumbuhan intrinsik spesies x.
e : besarnya laju peningkatan pertumbuhan spesies x akibat bertambahnya satu individu spesies z di dalam populasi.
f : besarnya laju penurunan spesies y akibat bertambahnya satu individu spesies z di dalam populasi.
g : laju pertumbuhan intrinsik spesies z.
h : besarnya laju peningkatan pertumbuhan spesies z akibat bertambahnya satu individu spesies y di dalam populasi
i : besarnya laju penurunan spesies z akibat bertambahnya satu individu spesies x di dalam populasi.
ANALISIS MODEL
Ada lima tahap yang dilakukan untuk menganalisis kondisi kastabilan pada kedua model tersebut antara lain:
• menentukan titik kritis
• mengkontruksi matrik komunitas (Jacobian).
• Menentukan nilai eigen dan menganalisis kondisi kestabilan.
• Menentukan orbit kestabilan
• Menafsirkan secara ekologis.
1. Analisis Model Dinamik untuk Interaksi Dua Spesies Mutualistik
1.1 Penentuan titik kritis
Dari persamaan (4) diperoleh empat titik kritis sebagai berikut: a. Pilih x = 0 dan y = 0 sehingga diperoleh titik kritis T1 (0, 0).
d. Pilih j−ax+by=0 dan k + cx - dy = 0 maka akan diperoleh titik kritis T4 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + − + bc ad ak cj bc ad bk dj ,
1.2 Kontruksi Matrik Jacobi
Dengan melakukan pelinieran pada sistem persamaan (20) maka diperoleh matrik komunitas
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + + − = dy cx k cy bx by ax j Ji 2
2 (12)
Matrik komunitas diperoleh dengan mensubstitusikan titik kritis T1,T2,T3 dan T4 yang telah diperoleh ke dalam matrik Ji (11) yaitu:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = k j J 0 0
1 (13)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + − = j a c k j a b j J 0 2 (14) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + = k k d c k d b j J 0 3 (15) ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 22 21 12 11 4 A A A A
J (16)
Dengan,
A11 =
bc ad bk dj a − + − ( )
A12 =
bc ad bk dj b − + ) (
A21 =
bc ad ak cj c − + ) (
A22 =
bc ad ak cj d − + − ( )
1.3 Analisis kestabilan titik kritis
Melalui persamaan (11) dapat diperoleh persamaan karakteristik pada titik kritis masing-masing, yaitu:
[
λ][
λ]
λ
λ = J − I = j− k−
P1( ) det( 1 ) =0 (17)
0 ] [ ) det( ) ( 2 2 = ⎥⎦ ⎤ ⎢⎣ ⎡ + − − − = − = λ λ λ λ a c k j I J P (18)
[
]
0) det( ) ( 3 3 = − − ⎥⎦ ⎤ ⎢⎣ ⎡ + − = − = λ λ λ λ k k d b j I J
P (19)
0 ) det( ) ( 2 4
4 λ = J −λI =λ −τλ+δ =
P (20)
⎥⎦ ⎤ ⎢⎣ ⎡ − + − + ⎥⎦ ⎤ ⎢⎣ ⎡ − + − = + = = bc ad ak cj d bc ad bk dj a A A J tr ) ( ) ( )
( 4 11 22
τ τ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + − ⎥⎦ ⎤ ⎢⎣ ⎡ − + − ⎥⎦ ⎤ ⎢⎣ ⎡ − + − = − = = bc ad ack j c bc ad k b bdj bc ad ak cj d bc ad bk dj a A A A A J 2 2 21 12 22 11 4 ) ( ) ( ) det( δ δ
Titik Kritis T1
Nilai eigen dari persamaan (17) yaitu, λ1= j danλ2=k
Diketahui j dan k positif (0<j<1,0<k<1) , a, d > 0 dan b,c≥0 sehingga λ1>0,danλ2 >0 (bilangan real dengan tanda sama). Dari hasil tersebut tipe titik kritis T1 merupakan simpul yang tidak stabil.
Titik Kritis T2
Nilai eigen persamaan (18) yaitu: j
a c k dan
j = +
−
= 2
1 , λ
λ
Karena (0<j<1,0<k<1) dan a, d > 0, b , c≥0 mengakibatkan λ1<0,danλ2 >0 (real berbeda dengan tanda berlawanan) maka titik kritis T2 adalah titik sadel yang tak stabil.
Titik Kritis T3
Nilai eigen persamaan (19) yaitu: k
dan k d b
j+ =−
= 2
1 , λ
λ
Karena ( 0 < j < 1, 0 < k <1) dan a, d > 0, b , c
≥
0
mengakibatkan λ1>0,danλ2 <0 maka titik kritis T3merupakan sadel tak stabil.Titik Kritis T4
Agar titik kritis T4 stabil maka harus memenuhi kriteria kestabilan berikut:τ <0,danδ >0 diketahui (0<j<1,0<k<1) , a, d > 0 dan b,c≥0 sehingga kondisi τ <0 terpenuhi jika ad – bc > 0 dan δ >0 sudah terpenuhi.
1.4 Orbit dan kestabilan sistem
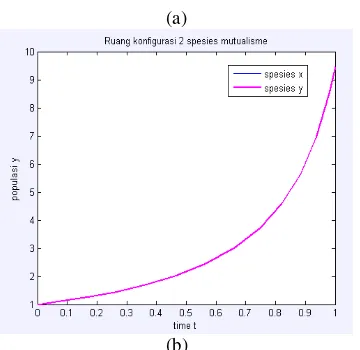
Orbit dan model dapat diperoleh dari dua tipe dinamik, yaitu: kasus ad > bc
(a) (b)
Gambar 5. (a) Grafik ruang fase bidang xy dengan kondisi awal x = 1, y = 1 dan t = 100 (b) Grafik laju populasi dengan kondisi awal x = 1 dan y = 1
Gambar 5 memperlihatkan bahwa titik kritis T1 merupakan titik simpul tak stabil, dari Gambar 5 terlihat orbit bergerak menjauhi T1(0,0) dan bergerak menuju titik kritis
T4(1.6,1.6), sehingga titik kritis tersebut merupakan titik simpul yang stabil. Kondisi ini diperoleh karena pada saat ad > bc maka akan diperoleh nilai eigen untuk T1 merupakan dua buah nilai real positif λ1>0,danλ2>0 sedangkan untuk titik kritis T4 saat ad > bc akan diperoleh nilai eigen berupa dua buah real negatif λ1<0,danλ2<0.
Gambar 6 memperlihatkan ruang fase bidang xy untuk berbagai variasi, dari gambar terlihat bahwa orbit bergerak dari kondisi awal menuju titik kritis T4. Dari gambar 6 (a) terlihat
lintasan orbit membelok, hal ini terjadi karena adanya titik kritis T2 dan T3 yang merupakan titik sadel yang bersifat tak stabil. Saat kondisi parameter berapapun pada titik kritis T2dan T3 akan tetap diperoleh dua buah nilai eigen real berlawananan tanda.
Gambar 6 memperlihatkan pada kondisi parameter ad > bc semua sistem bergerak menuju kestabilan asimtotik. Pada kondisi ini kedua spesies dapat hidup bersama dan bertahan hidup untuk jangka waktu tertentu dengan syarat interaksi intraspesifiknya (interaksi antaspesies itu sendiri) harus lebih besar dibandingkan dengan interaksi interspesifiknya (interaksi dengan spesies yang berbeda).
(c) (d)
Gambar 6. Grafik kestabilan titik kritis T4 saat ad > bc (a) ruang fase bidang xy dengan memvariasikan kondisi awal dan t = 100 (a) laju populasi kondisi awal x = 2 dan y = 2 (b) laju populasi kondisi awal x = 1 dan y = 2 dan (c) laju populasi kondisi awal x = 2 dan y = 1.
kasus ad < bc
Dengan parameter a = d = 0.5 , b = c = 1, j = k = 0.8dan kondisi awal bervariasi, maka diperoleh grafik ruang fase dan grafik laju populasinya sebagaimana diperlihatkan pada gambar berikut.
Gambar 7 memperlihatkan bahwa pada saat parameter ad < bc (interaksi interspesifiknya lebih dominan dari interaksi intraspesifik) maka ruang fase tersebut memperlihatkan perilaku dinamik yang tidak stabil, karena orbit bergerak menjauhi titik kritis T4. Pada kondisi tersebut kedua populasi spesies memperoleh keuntungan yang berlebihan sehingga laju pertumbuhan kedua spesies mengalami peningkatan tanpa batas dan terjadi peledakan populasi.
(a)
(b)
Gambar 7.(a) grafik ruang fase bidang xy dengan kondisi awal x = 1, y = 1 dan t = 1 (b) grafik laju perubahan populasi dengan kondisi awal x = 1 dan y = 1
2. Analisis Model Dinamik Interaksi Dua Spesies Mutualistik dengan kehadiran Pemangsa
2.1 Penentuan titik kritis
Melalui persamaan (5) diperoleh titik kritis sebagai berikut:
T1(0,0,0). (21)
T2 (j/a,0,0), (22)
[image:34.612.337.517.295.470.2]T4 , , 0 dj bk cj ak ad bc ad bc
+ +
⎛ ⎞
⎜ − − ⎟
⎝ ⎠, (24)
T5
0,l, fk dl
f fe
⎛ − + ⎞
⎜ ⎟
⎝ ⎠
(25)
T6 fj bl l afk, , adl cfj cbl
fa f afe
⎛ + − + + ⎞
⎜ ⎟
⎝ ⎠
(26)
2.2 Kontruksi Matriks Jacobi
Dengan melakukan pelinieran pada persamaan 21, maka diperoleh matriks komunitas sebagai berikut:
Ji=
2 0
2 0
j ax by bx
cy k cx dy ez ey
fz l fy
− + ⎡ ⎤ ⎢ + − − − ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎣ ⎦ (27)
Matrik komunitas diperoleh dengan mensubstitusikan titik kritis yang telah diperoleh ke dalam matrik Ji (19) yaitu:
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = l k j J 0 0 0 0 0 0
1 (28)
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + − = l a cj k a bj j J 0 0 0 0 0 2 (29) ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − − + = d fk l d ek k d ck d bk j J 0 0 0 0 3 (30) ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 33 32 31 23 22 21 13 12 11 4 A A A A A A A A A
J (31)
Dengan, ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − + + − = = = − + − = − + − = − + = = − + = − + − = bc ad ak jc f l A A A bc ad ak jc e A bc ad ak jc d A bc ad ak jc c A A bc ad dj bk b A bc ad dj bk a A 33 32 31 23 22 21 13 12 11 0 0 ) ( ) ( ) ( 0 ) ( ) ( ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − + = 0 0 0 0 5 e dl fk f el f dl f cl f bl j
J (32)
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = 33 32 31 23 22 21 13 12 11 6 B B B B B B B B B
J (33)
Dengan, 11 12 13 2 1 2 2 ( ) ( ) 0
a fj bl B
a f b fj bl B af B cl B f d l B f − + = + = = = − = 0 0 33 32 31 23 = + + − = = − = B ae cbl cfj adl afk B B f el B
2.3 Analisis kestabilan titik kritis
Dari persamaan karakteristik diperoleh nilai eigen T1yaitu:
1 j, 2 k, 3 l
λ = λ = λ = − (34)
Sehingga, karena pada titik kritis ini nilai eigen terdiri dari dua real positif dan satu real negatif maka trayektor pada titik ini merupakan titik tak stabil.
Titik Kritis T2
Dari persamaan karakteristik diperoleh nilai eigen T2 yaitu:
1 , 2 , 3
ka cj
j l
a
λ = − λ = + λ = − (35)
Diperoleh bahwa nilai eigen dari titik kritis ini terdiri dari dua nilai real negatif dan satu real positif. Sehingga aliran vektor pada titik kritis ini juga merupakan titik tak stabil. Titik Kritis T3
Dari persamaan karakteristik diperoleh nilai eigen T3 yaitu:
1 , 2 , 3
bk dj fk dl
k
d d
λ = + λ = − λ = − (36)
Dari nilai eigen tersebut dapat diperoleh bahwa pada titik kritis tersebut merupakan titik tak stabil.
Titik Kritis T4
Kondisi kestabilan pada T4 terjadi saat pemangsa punah, sehingga analisis dari titik kritis ini sama dengan model interaksi mutualisme dua spesies tanpa kehadiran pemangsa.
Untuk menganalisis kondisi kestabilan dari titik kritis T4, maka diperlukan analisis tiap parameter yang digunakan sebagai berikut: Tabel 1. Nilai-nilai parameter yang digunakan dalam titik kritis T4 Model Mutualisme
Kasus a b c d
ad > bc ad < bc
2.5 0.5
1 1
1 1
2.5 0.5 Kasus ad > bc
Pada saat ad > bc maka akan diperoleh nilai eigen sebagai berikut:
1 0.333, 2 1.000, 3 2.333 λ = − λ = − λ = −
Sehingga trayektor pada titik tersebut merupakan titik stabil.
Gambar 8. Grafik ruang fase titik kritis T4 dengan kondisi awal x = 1, y = 1, z = 1, t = 1000 dan parameter a = 2.5, b = 1, c = 1 dan d = 2.5
Gambar 9. Grafik ruang fase dengan kondisi awal x = 1 dan y = 1
Kasus ad < bc
Pada saat ad < bc maka akan diperoleh nilai eigen sebagai berikut:
1 3.000, 2 1.000, 3 2.999
λ = − λ = − λ =
Gambar 10. Grafik ruang fase titik kritis T4
dengan kondisi awal x = 1, y = 1, z = 1, t = 1000 dan parameter a = 0.5, b = 1, c = 1 dan d = 0.5
Gambar 11. Grafik ruang fase dengan kondisi awal x = 1 dan y = 1
Titik Kritis T5
Untuk menganalisis kondisi kestabilan dari titik kritis T5 maka diperlukan analisis tiap parameter yang digunakan sebagai berikut: Tabel 2. Nilai-nilai parameter yang digunakan dalam titik kritis T5 model mutualisme
Kasus f k d l
fk < dl
fk < dl
fk = dl
fk > dl
fk > dl
fk > dl 1 1 1 1 1 1
1 1 1 1 1 1
1.5 1.2 1 0.7 0.5 0.3
1.5 1.2 1 0.7 0.5 0.3
[image:37.612.132.312.91.241.2]Dari beberapa parameter tersebut dapat diperoleh grafik ruang fase yang mamperlihatkan gejala bifurkasi pada titik kritis T5.Gambar 12 memperlihatkan gejala bifurkasi yang terjadi pada titik kritis T5. Gambar 12(a) memperlihatkan orbit kestabilan di sekitar titik kritis T5 yang merupakan titik stabil kemudian dengan mengubah parameter, secara perlahan titik tersebut berubah menjadi spiral yang stabil seperti yang terlihat pada gambar 12(d), 12(e) dan 12(f). Terlihat trayektor memiliki lintasan periodik spiral di sekitar titik kritis yang semakin memenuhi bidang spiral.
Gambar 13 memperlihatkan laju perubahan populasi ketika spesies x tetap, dari grafik tersebut terlihat ketika populasi spesies x tetap maka populasi spesies y akan mengalami penurunan secara periodik hingga mencapai keseimbangan populasi, penurunan ini disebabkan karena laju pertumbuhan populasi dipengaruhi secara mutual oleh spesies x sehingga ketika interaksi interspesifiknya berkurang dibandingkan dengan interaksi intraspesifiknya maka populasinya akan mengalami penurunan secara periodik. Dari gambar terlihat pula ketika spesies x dibuat tetap populasi pemangsa z akan mengalami penurunan juga seiring dengan menurunnya spesies y yang menjadi mangsanya sampai pada suatu keseimbangan populasi tertentu.
Analisis Titik Kritis T5
Parameter 1
Jika parameter yang dipakai adalah f = 1, k = 1, d = 1.5 dan l = 1.5 maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2.500, 2 0.647, 3 -2.897
[image:37.612.132.310.407.559.2]Diperoleh dua buah nilai eigen positif yang bersesuaian dengan bidang tak stabil dan satu nilai eigen real negatif yang bersesuaian dengan garis stabil, sehingga dari nilai eigen tersebut diketahui pada titik kritis tersebut dengan kondisi parameter fk < dl merupakan titik sadel.
Parameter 2
Jika parameter yang dipakai adalah f = 1, k = 1, d = 1.2 dan l = 1.2 maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2.200, 2 0.302, 3 -1.742
λ = λ = λ =
Diperoleh dua buah nilai eigen positif yang bersesuaian dengan bidang tak stabil dan satu nilai eigen real negatif yang bersesuaian dengan garis stabil. Dari nilai eigen tersebut diketahui pada titik kritis tersebut dengan kondisi parameter fk < dl merupakan titik sadel.
Parameter 3
Jika parameter yang dipakai adalah f = 1, k = 1, d = 1 dan l = 1, maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2.000, 2 0.000, 3 -1.000
λ = λ = λ =
Diperoleh sebuah eigen positif yang bersesuaian dengan bidang tak stabil dan satu nilai eigen real negatif yang bersesuaian dengan garis stabil. Sehingga, dari nilai eigen tersebut maka diketahui pada titik kritis tersebut dengan kondisi parameter fk = dl merupakan titik stabil.
Parameter 4
Jika parameter yang dipakai adalah f =1, k = 1, d = 0.7 dan l = 0.7 maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2
3
1.700, -0.245 0.544 i -0.245-0.544 i
λ λ
λ
= = +
=
Sehingga diperoleh dua buah nilai eigen kompleks dengan bagian realnya bernilai negatif sehingga orbit yang dihasilkan membentuk sebuah bidang bersifat spiral stabil. Dan sebuah garis tak stabil yang bersesuaian dengan niali eigen real positifnya. Parameter 5
Jika parameter yang dipakai adalah f = 1, k = 1, d = 0.5 dan l = 0.5maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2
3
1.500, -0.125 0.599 i -0.125-0.599 i
λ λ
λ
= = +
=
Sehingga diperoleh dua buah nilai eigen kompleks dengan bagian realnya bernilai negatif sehingga orbit yang dihasilkan membentuk sebuah bidang bersifat spiral stabil. Dan sebuah garis tak stabil yang bersesuaian dengan niali eigen real positifnya. Parameter 6
Jika parameter yang dipakai adalah f = 1, k = 1, d = 0.3 dan l = 0.3 maka secara numerik diperoleh nilai eigen sebagai berikut:
1 2
3
1.300, -0.045 0.520 i
-0.045-0.520 i
λ λ
λ
= = +
=
(a) (b)
(c) (d)
[image:39.612.134.513.79.629.2]
(e) (f)
(a) (b)
(c) (d)
[image:40.612.133.512.78.620.2]
(e) (f)
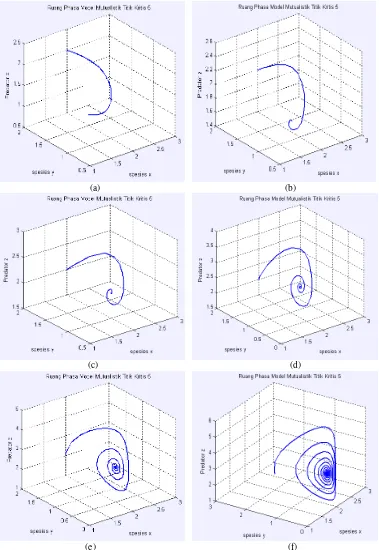
Titik Kritis T6
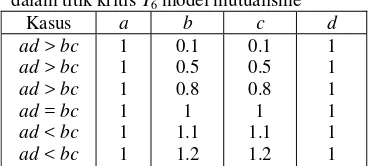
[image:41.612.127.313.172.255.2]Untuk menganalisis kondisi kestabilan dari titik kritis T6 maka diperlukan analisis tiap parameter yang digunakan sebagai berikut:
Tabel 3. Nilai-nilai parameter yang digunakan dalam titik kritis T6 model mutualisme
Kasus a b c d
ad > bc ad > bc ad > bc ad = bc ad < bc ad < bc
1 1 1 1 1 1 0.1 0.5 0.8 1 1.1 1.2 0.1 0.5 0.8 1 1.1 1.2 1 1 1 1 1 1
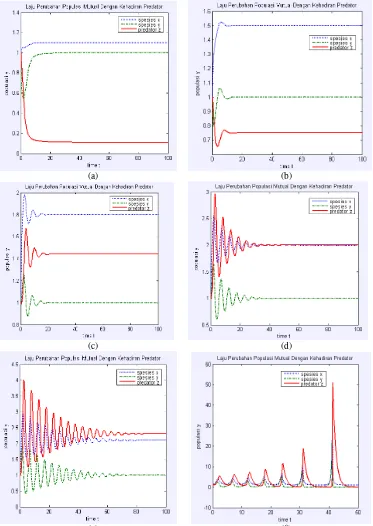
Gambar 14. memperlihatkan terjadinya bifurkasi pada titik kritis T6 sesuai dengan perubahan pada parameter yang diberikan. Pada gambar 14(a) dengan parameter b = 0.1 dan c = 0.1, di sekitar titik kritisnya masih bersifat sebagai Simpul Stabil. Sedangkan pada gambar 14(b), 14(c), 14(d), dan 14(e) memperlihatkan bahwa terjadi bifurkasi dari simpul stabil menjadi Spiral Stabil. Jika parameter yang digunakan yaitu b = 1.2 dan c = 1.2 maka orbit di sekitar titik kritis tersebut akan bersifat Spiral Tak Stabil. Sehingga pada titik kritis T6 terjadi tiga kali bifurkasi yang memiliki sifat yang berbeda tergantung pada parameter yang digunakan.
Gambar 15 memperlihatkan laju perubahan populasi dengan m