RANCANGAN PEMANCAR PENGAMAN SEPEDA MOTOR
DENGAN MENGGUNAKAN REMOTE KONTROL
BERBASIS MIKROCONTROLER AT89C51
TUGAS AKHIR
MAIDA SIANTURI 082408016
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
JUDUL : RANCANGAN PEMANCAR PENGAMAN
SEPEDA MOTOR DENGAN MENGGUNAKAN REMOTE KONTROL
BERBASIS MIKROKONTROLER SECARA HADWARE
KATEGORI : TUGAS AKHIR
NAMA : MAIDA SIANTURI
NIM : 082408016
PROGRAM STUDI : DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN : FISIKA
FAKULTAS : MATEMATIKA DAN ILMU PENGETAHUAN ALAM
Diluluskan di : Medan, Juni 2011
Diketahui :
Departemen Fisika FMIPA USU Pembimbing Ketua Program Studi D – III FIN
PERNYATAAN
RANCANGAN PEMANCAR PENGAMAN SEPEDA MOTOR DENGAN MENGGUNAKAN REMOTE KONTROL BERBASIS
MIKROKONTROLER AT89S51
TUGAS AKHIR
Saya menyatakan bahwa tugas akhir ini adalah hasil karya saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni 2011
PENGHARGAAN
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa karena atas berkat kasih dan karunia-NYA penulis dapat menyelesaikan Laporan Tugas Akhi ini.Tidak terlepas dari abntuan dari berbagai pihak baik berupa dorongan semangat materi dan sumbangan pikiran.Oleh karena itu pada kesempatan ini penulis mengucapkan terimakasih pada semua pihak yang telah memberikan bantuan terutama kepada Prof. Dr Sutarman, Msc selaku dekan FMIPA USU,Ibu Dr Susilawati ,M.si selaku ketua jurusan program studi fisika Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Bapak Dr Bisman Parangin-angin M.Eng.Sc selaku dosen pembingbing.Staff dan pegawai di Fakultas Matimatikan dan Ilmu pengetahuan alam khusnya program studi fisika instrumentasi.Kepada ayahanda J.Sianturi danMamaku tercinta E.nababan yang telah membesarkan aku sehingga bisa sampai saat ini,abangku Jannes Sianturi,Luat barisan Sianturi, Osner Sianturi,Adner Sianturi,Kakakku Jelita sianturi dan Adikku Berta sianturi yang telah banyak memberikan semangat dan bantuan secara moril maupun materi.Terimakasih juga buat teman-temanku kak octha istri bang tambun,bang tambun suami kak octha, kak july,Gini,Efni,Ilam sigendut,smua penghuni kos 24 dan penghuni kos 32 memberikan semangat kepada penulis,Tidak lupa juga terimakasih kepada Billsimon gultom yang membantu penulis n mengawani penulis mulai dari Pkl,Proyek,sampai Tugas akhir ini selesai.Terkhusus buat cian awak Herlimson simanjuntak yang selalu membantu dan memberikan semangat dalam menyelesaikan tugas akhir ini.
ABSTRAK
Alat Bantu kontrol kendaraan ini dapat digunakan mempermudah kerja manusia dalam pengaman dan menstater kendaraan dari jarak jauh. untuk mengendalikan kerja mikrokontroler sebagai pengotrol kendaraan bermotor roda dua. Mikrocontroler mengirimkan data logika dan clock port serial sebagai register melelui permancar ASK (Amplitudo Shift Keying). Byte data logika dan clock diterima oleh rangkaian penerima ASK (Amplitudo Shift Keying) ,rangkaian alarm dan start motor agar motor dapat dikontrol dengan remote kontron jarak jauh.
Adapun tujuan dan manfaat perancangan ini adalah untuk mengetahui bagaimana cara marancang system control kendaran bermotor dengan menggunakan AT89C51 dan seytem konrol kendaraan bermotor ini dapat digunakan menjamin keamanan sepeda motor serta pengemudi bisa lebih cepat mengetahui letak sepeda motornya diarea parkir yang luas.
DAFTAR ISI
Halaman
PERSETUJUAN ... i
PERNYATAAN ... ii
PENGHARAGAAN ... iii
ABSTRAK ... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xii
BAB I ... 1
PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan Perancangan ... 2
1.4 Manfaat Perancangan ... 3
1.5 Sistematika Penulisan... 3
BAB II ... 5
DASAR TEORI ... 5
2.1 MIKROKONTROLER AT89C51 ... 5
2.1.2 Arsitektur Mikrokontroller AT 89C51 ... 6
2.1.3 Fungsi-fungsi kaki pada Mikrokontroler AT89C51 ... 8
2.1.4 Register Fungsi Khusus ... 11
2.1.5 Struktur Memori ... 13
Osilator ... 17
2.1.6 Central Processing Unit (CPU) ... 19
2.2 Penggunanaan Softwere 8051 IDE ... 19
2.3 Penggunaan Softwere Downloader ... 20
2.4. Mode-Mode Pengalamatan ... 20
2.4.1 Mode Pengalamatan Segera (immediate addressing mode)... 20
2.4.2. Mode Pengalamatan Langsung (direct addressing mode) ... 21
2.4.3 Mode Pengalamatan Tidak Langsung (indirect addressing mode). 21 2.4.4 Mode Pengalamatan Register (register addressing mode) ... 21
2.4.5 Mode Pengalamatan Berindeks ... 22
2.5 Bus-Bus Pada AT89C51 ... 22
2.6 Amplitudo Shift Keying (ASK) ... 23
2.6.1 Pemancar TLP434A ... 28
BAB III ... 32
RANCANGAN SISTEM ... 32
3.1.1. Blok Tombol ... 33
3.1.2. Blok Mikrokontroller I ... 33
3.1.3. Blok Pemancar ASK (amplitodo shift keying) ... 33
3.1.4. Blok Mikrokontroller II... 33
3.1.5 Blok Relay ... 33
3.1.6. Blok Alarm ... 33
3.1.7. Blok Tombol Reset ... 33
3.1.8. Blok Starter ... 34
3.2 Perancangan Skematik Rangkaian ... 34
3.2.1. Rangkaian Mikrokontroller AT89C51 ... 34
3.2.2. Rangkaian Pemancar ... 35
3.3. Pembuatan Layout Dan Pemasangan Komponen Ke PCB ... 40
3.3.1. Langkah – langkah pada pembuatan layout ... 40
3.3.2. Penyablonan dan penbuatan jalur... 43
3.4. Pengcompile Program ... 46
3.5. Pengisian Program Dari DT-HIQ Programmer... 47
3.6. Variabel Yang Diamati ... 50
BAB IV ... 51
HASIL DAN ANALISA PENGUJIAN ... 51
Titik Pengukuran ... 51
Tabel 4.2. Titik Pengukuran pada Driver Relay ... 51
4.1.1 Analisa Pengujian Rangkaian Pemancar ASK ... 52
4.1.2 Analisa Pengujian Sistem Mikrokontroler AT89C51 ... 53
4.1.3 Analisa Pengujian Rangkaian Driver ... 54
4.1.4. Analisa Pengujian Rangkaian Tombol ... 56
4.2. Analisa Software ... 57
4.2.1. Analisa Software Pemancar ... 57
4.3 Gambar Hasil ... 60
4.3.1 Gambar bagian pemancar ... 60
BAB V ... 62
KESIMPULAN DAN SARAN ... 62
5.1. Kesimpulan ... 62
DAFTAR GAMBAR
Halaman
Gambar 2.1. Diagram Block Mikrocontroler AT89C51………. 6
Gambar 2.2 Diagram Pin Mikrocontroler AT89C51………. 10
Gambar 2.3 89C51 Mengakses EPROM & RAM Eksternal………….. 16
Gambar 2.4 Pemakain Osilator Eksternal……… 18
Gambar 2.5 Pembangkit Sinyal Clock Internal……….. 19
Gambar 4.2 Titik Pengukuran Pada AT89C51………. 49
Gambar 4.3 Aliran Arus & Perubahan tegangan Reset Otomatis…….. 49
Gambar 4.4 Rangkaian Driver……… 50
Gambar 4.5 Pengujian Rangkaian Tombol……….. 52
Gambar 4.6 Tombol pada remote……… 58
Gambar 4.7 Pemancar dengan HT12E……….. 58
Gambar 4.8 IC AT89C51 Pada remote kontrol……… 58
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Khusus Port 3……….. 8
Tabel 2.2 Struktur RAM 128 Byte………. 13
Tabel 2.3 Susunan Bank-bank Register……….. 14
Tabel 2.7 Data Sheat TLP4 34A ………. 26
Tabel 2.8 Data Sheat RLP34A……… 27
Tabel 4.1 Data Hasil Perancangan Pengujian Saat Power On Reset.. 50
Tabel 4.2 Titik Pengukuran Pada Driver Relay………. 50
ABSTRAK
Alat Bantu kontrol kendaraan ini dapat digunakan mempermudah kerja manusia dalam pengaman dan menstater kendaraan dari jarak jauh. untuk mengendalikan kerja mikrokontroler sebagai pengotrol kendaraan bermotor roda dua. Mikrocontroler mengirimkan data logika dan clock port serial sebagai register melelui permancar ASK (Amplitudo Shift Keying). Byte data logika dan clock diterima oleh rangkaian penerima ASK (Amplitudo Shift Keying) ,rangkaian alarm dan start motor agar motor dapat dikontrol dengan remote kontron jarak jauh.
Adapun tujuan dan manfaat perancangan ini adalah untuk mengetahui bagaimana cara marancang system control kendaran bermotor dengan menggunakan AT89C51 dan seytem konrol kendaraan bermotor ini dapat digunakan menjamin keamanan sepeda motor serta pengemudi bisa lebih cepat mengetahui letak sepeda motornya diarea parkir yang luas.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Teknologi membuat segala sesuatu yang dilakukan menjadi lebih mudah. Manusia selalu berusaha untuk menciptakan sesuatu yang dapat mempermudah aktivitasnya. Hal inilah yang mendorong perkembangan teknologi yang telah banyak menghasilkan alat sebagai piranti untuk mempermudah kegiatan manusia bahkan menggantikan peran manusia dalam suatu fungsi tertentu. Teknologi memegang peran penting di era modernisasi seperti pada saat ini, dimana teknologi telah menjadi bagian yang tidak dapat dipisahkan dalam kehidupan sehari-hari. Perkembangan teknologi saat ini telah menambah ke segala aspek kehidupan sehingga saat ini dimanjakan manusia oleh adanya alat-alat yang dapat memberikan kemudahan. Dengan tingginya angka kriminalitas khususnya pencurian yang terjadi saat ini.
Khususnya perkembangan teknologi dibidang elektronika dapat di
manfaatkan untuk meringankan pekerjaan atau rutinitas manusia. Banyaknya
masalah dan kesulitan pada keamanan berkendaraan roda dua khususnya untuk
menjamin keamanan maupun mempermudah penggunaannya, misalnya sulitnya
mengenali sepeda motor pada area parkir yang luas karena banyaknya jumlah
sepeda motor yang terparkir. Karena selama ini pencarian pancarian kandaraan
bermotor roda dua diarea parkir dilakukan dengan cara harus melapor penjaga
parkir atau mengingat dimana pertama kali sepeda motor di parkirkan. Akan tetapi
dengan cara ini akan menggunakan waktu yang cukup lama, oleh karena itu
Satu hal yang juga sangat penting adalah keamanan dari system tersebut
yaitu penguncian stop kontak. Tidak lengkap dan tidak aman jika sistem tersebut
hanya secara manual saja. Akan lebih lengkap jika hanya orang-orang tertentu
yang bisa mengoperasikan alat tersebut. Hal ini bisa dilakukan dengan kombinasi
tombol yang ada pada remote kontrol, dan jika salah mengoperasikan maka harus
dilakukan reset yang hanya diketahui orang yang memiliki akses.
1.2 Rumusan Masalah
Berdasarkan uraian yang terdapat pada latar belakang di atas, maka dalam
laporan proyek ini dapat diidentifikasikan beberapa masalah yang perlu
diperhatikan sebagai berikut
1. Microcontroller AT89C51 dapat menghidupkan, dan mengunci sepeda
motor dengan jarak jauh.
2. Mikrocontroler AT89C51 dapat digunakan sebagai pengendali kendaraan
jarak jauh / pengamannan.
3. Untuk mengetahui keberadaan sepeda motor di area parker yang luas dan
mempercepat menghidupkannya.
1.3 Tujuan Perancangan
Adapun tujuan dari pada perancangan ini adalah:
1. Untuk mengetahui bagaimana cara merancang system control
kendaraan bermotor jarak jauh dengan menggunakan AT 89C51.
3. Untuk mengetahui apakah mikrocontroler AT 89C51 dapat
digunakan untuk applikasi pada control jarak jauh.
1.4 Manfaat Perancangan
Dengan dilakukannya perancangan, maka manfaat yang diperoleh adalah
sebagai berikut:
1. System control jarak jauh kendaraan bermotor ini dapat digunakan
untuk menjaga keamanan sepeda motor.
2. Dengan mnggunakan control jarak jauh untuk kendaraan bermotor
roda dua dapat menjadi danya tarik seseorang.
3. Untuk mengetahui keberadaan sepeda motor di area parkir yang
luas dan mempercepat menghidupkannya.
1.5 Sistematika Penulisan
Agar Tugas akhir ini lebih mengarah pada permasalahan dan membuat
keteraturan dalam penyusunan dan penulisannya maka dibuat dalam beberapa
bab, sebagai berikut:
BAB 1. PENDAHULUAN
Bab ini meliputi latar belakang masalah, rumusan masalah ,
hipotesis dan tujuan perancangan, manfaat perancangan, dan
sistematika penulisan.
BAB 2. DASAR TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan
itu antara lain tentang mikrokontroler AT 89C51 (hardware dan
software), bahasa program yang digunakan, serta cara kerja dari
rangkaian pemancar dan rangkaian penerima
BAB 3. RANCANGAN SISTEM
Bab ini berisi rancangan perangkat keras maupun perangkat lunak.
BAB 4. PENGUJIAN ALAT DAN PROGRAM
Bab ini berisi hasil pengujian perangkat keras maupun lunak
disertai analisa pengujian.
BAB 5. KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan
yang didapat setelah merakit proyek ini dan saran yang diberikan
BAB II
DASAR TEORI
2.1 MIKROKONTROLER AT89C51
2.1.1 Gambaran Umum
Mikrokontroler sebagai teknologi semi konduktor, kehadirannya sangat
membantu perkembangan didunia elektronika. Arsitektur mikrocontroler banyak
kandungan transistor yang terintegrasi, sehingga mendukung dibuatnya rangkaian
elektronika yang lebih simpel tetapi dalam rangkaian sebenarnya dengan memakai
transistor maka rangkaian ini sangat besar.
Mikrokontroler dapat diproduksi secara masal sehingga harganya
menjadi lebih murah dibandingkan dengan mikroprosesor, Tetapi tetap memiliki
kelebihan yang bisa diandalkan. Mikrokontroler memiliki perbandingan ROM dan
RAM nya yang besar, artinya program control disimpan dalam ROM yang
ukurannya relative lebih besar, sedangkan RAM digunakan sebagai tempat
penyimpan sementara, termasuk register-register yang digunakan dalam
mikrokontroler yang bersangkutan.
Pengunaan utama dari mikrokontroler adalah untuk mengontrol operasi
dari mesin. Strategi kendali untuk mengontrol mesin tertentu dimodelkan dalam
program algoritma pengaturan yang ditulis dalam bahasa assembly. Program
tersebut selanjutnya di translasi ke kode mesin digital dan disimpan selanjutnya di
dalam media penyimpanan digital yang disebut ROM. Mikrokontroler adalah
Central processing unit (CPU) yang disertai memori serta sarana Input/output dan
2.1.2 Arsitektur Mikrokontroller AT 89C51
Gambar.2.1. Diagram Blok Mikrokontroler AT89C51
Pada Gambar 2.1. terlihat bahwa terdapat 4 port untuk input output data, serta
tersedia pula akumulator, register, RAM, stack pointer, Arithmetic Logic Unit
(ALU), pengunci (latch) dan rangkaian osilasi yang membuat 89C51 dapat
Mikrokontroler AT 89C51 merupakan produk ATMEL, memiliki fitur sebagai
berikut:
1. Sebuah central processing unit 8 bit
2. Osilator Internal dan rangkaian pewaktu
3. 4 kbyte memori program yang dapat ditulis hingga 1000 kali
4. 128 Byte memori RAM internal
5. 32 jalur input-output (4 buah port parallel I/O)
6. 2 Timer/ counter 16 bit
7. 2 data pointer
8. Lima buah jalur interupsi (dua buah interupsi eksternal dan 3 buah
interupsi internal)
9. ISP (In system Programmable) Flash memori 4 Kbyte
10.Port serial full dupleks
11.Kemampuan untuk melaksanakan operasi aritmetika dan operasi logika
12.Kecepatan melaksanakan instruksi per siklus 1 mikrodetik pada
frekwensi12MHz.
Keluarga mikrokontroler adalah suatu alat elektronika yang paling populer
saat ini. Keluarga ini diawali oleh Intel yang mengenalkan IC mikrokontroler type
8051 pada awal tahun 1980-an, 8051 termasuk sederhana dan harganya murah
sehingga banyak digemari. Sampai kini sudah ada lebih dari 100 macam
mikrokontroler turunan 8051, sehingga terbentuklah sebuah keluarga besar
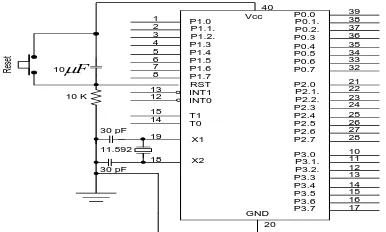
ICAT89C51 hanya memerlukan tambahan 3 kapasitor,1 resistor dan 1 Xtal
serta catu daya 5 Volt. Kapasitor 10 µF dan resistor 10 Kohm dipakai untuk
rangkaian reset, dengan adanya rangakaian Reset ini AT89C51 otomatis di reset
begitu rangkaian menerima catu daya. Xtal dengan frekwensi maksimum 24 Mhz
dan 2 kapasitor 30 pico Farad dipakai untuk melengkapi rangkaian osilator
pembentuk clock yang menentukan kecepatan kerja mikrokontroler.
2.1.3 Fungsi-fungsi kaki pada Mikrokontroler AT89C51
IC 8051 mempunyai 40 kaki, dengan 32 kaki dipakai sebagai port-port
multiguna, kaki sebagai sumber tegangan, kristal, dan kaki-kaki untuk
kendali(pembacaan memori). Gambar 2.2. memperlihatkan diagram pin
mikrokontroler AT89C51 Berikut adalah fungsi-fungsi kaki mikrokontroler 8051
standar.
1. P1.0-P1.7 (port 1)
Port 1 merupakan port 8 bit dua arah (input/output). Port satu bisa diakses
per-bit.
2. Port 3 merupakan port 8 bit dua arah (input/output). Selain berfungsi
Tabel 2.1. Fungsi khusus port 3
Port Fungsi khusus
P3.0 RXD (merupakan masukan untuk port serial)
P3.1 TXD (merupakan output dari port serial)
P3.2 INT0 merupakan masukan untuk interupsi eksternal 0
P3.3 INT1, merupakan masukan untuk pulsa external 1
P3.4 T0 merupakan masukan untuk pulsa external timer 0
P3.5 T1 merupakan masukan untuk pulsa eksternal timer 1
P3.6 WR merupakan sinyal tulis (write strobe) untuk menulis data eksternal.
Aktif rendah
P3.7 RD merupakan sinyal baca (Read strobe) untuk membaca data dari memori
Eksternal. Aktif rendah.
3. Port2.0-Port2.7
Port 2 mempunyai lebar 8 bit dua arah atau input/output. Selain
sebagai input dan output Port 2 memiliki fungsi khusus yaitu pada saat
menjalankan program dari memori program eksternal atau pada saat
mengakses memori data eksternal yang menggunakan perintah 16 bit.
Atau alamat orde tinggi A8-A15.
4. Pin 32 sampai 39 (Port 0)
Port 0 merupakan Port keluaran/masukan (I/0). Sebagai Port keluaran,.
Port 0 dapat digunakan sebagai masukan-masukan berimpedansi tinggi.
Selain sebagai input output P0 memiliki fungsi khusus yaitu sebagai bus
data (DO-D7) dan bus alamat orde rendah (A0-A7) yaitu pada saat
5. RST berfungsi sebagai mengembalikan kerja mikro ke awal program yang
berada di ROM.
6. XTAL 1 dan XTAL 2
XTAL 1 merupakan keluaran dari rangkaian penguat osilator internal,
sedangkan XTAL 2 merupakan masukan kepenguat osilator internal,
sebuah kristal dan dua buah kapasitor yang dihubungkan ke pin ini sudah
cukup untuk menyediakan sinyal detak (clock) untuk mikrokontroler.
7. VCC dan GND
VCC dan GND merupakan pin untuk tegangan DC. Mikrokontroler 8051
standar membutuhkan tegangan DC sebesar 5 Volt agar bisa bekerja
dengan baik.
8. Pin 29 (PSEN)
PSEN (Program Store Enable) adalah pulsa pengaktif untuk membaca
memori luar.
9. ALE/PROG
Berfungsi untuk demultiplexer pada saat Port 0 bekerja sebagai data bus
(pengaksesan memori eksternal). Pada paruh pertama memory cycle, Pin
ALE mengeluarkan sinyal latch yang menahan alamat ke eksternal
register. Pada paruh kedua memory cycle, Port 0 digunakan sebagai data
bus. Jadi fungsi utama dari ALE adalah untuk memberikan signal ke IC
latch (bisa 74CT573) agar menahan/ menyimpan address dari port 0 yang
akan menuju memori eksternal, dan selanjutnya port 0 akan mengeluarkan
data melalui port 0 juga.
10.EA /VPP
EA (Eksternal Access) digunakan untuk memilih penggunaan memori.
Jika EA high maka yang dipilih adalah memori internal, jika EA low atau
dihubung ke GND maka yang dipilih atau memori yang dipakai adalah
memori luar.
2.1.4 Register Fungsi Khusus a. Akumulator
ACC digunakan sebagai register utama dalam proses aritmatik dan
penyimpanan data sementara. Dalam penulisan instruksi ACC ditulis A.
ACC menempati alamat E0h. Register ini bisa diakses per byte maupun
b. Register B
Register B menempati alamat F0h. Register ini dipakai bersama-sama
dengan Register A pada proses aritmatik (perkalian dan pembagian).
Register B juga bisa diakses Per byte dan per bit.
c. PSW (Program Status Word)
Program Status Word atau PSW berisi bit-bit yang berkaitan dengan
kondisi CPU. Status yang tersimpan dalam PSW meliputi : carry bit,
auxiliary carry (untuk operasi BCD), dua bit pemilih bank register,
overflow flag, parity, dan dua flag status yang bisa didefiniskan sendiri
(user definable).
d. P0 - P3 (Register Port)
Register port merupakan SFR yang mengatur kerja port-port 8051(P0-P3).
Register ini merupakan alamat Latch dari masing-masing port. Menulis
atau membaca latch ini sama dengan menulis atau membaca latch yang
bersangkutan sehingga data data bisa ditulis ke dan dibaca dari
masing-masing port 8051.
Mov 80h,#45h
Sama artinya dengan
Mov P0,#45h
e. Data Pointer (DPTR) dan Stack Pointer (SP)
Data pointer (DPTR) adalah register 16 bit yang biasa dipakai untuk
pengalamatan data 16 bit. Misalnya pada saat membaca atau menulis
RAM eksternal (dengan perintah MOVX). DPTR menempati dua alamat
dengan nama DPL (DPTR bit 0 - bit 7) dan DPH (DPTR bit 8-bit 15).
DPTR tidak bisa diakses per bit.
Stack pointer merupakan register 8 bit, dipakai untuk menyimpan
data sementara pada saat perintah push, pop dan call, ret. Misalnya suatu
rutin yang memakai register A akan memanggil (call) subrutin yang juga
memakai register A, maka agar data register A pada rutin pertama tidak
dimodifikasi oleh subrutin yang dipanggil, data register A harus disimpan
dulu di SP (dengan perintah push).
Setelah subrutin selesai dikerjakan, data register A yang tersimpan
di SP di baca kembali (melalui perintah pop) dan disimpan di register A.
Perintah call akan menyimpan isi PC (program counter) ke dalam SP dan
mengambilnya kembali setelah instruksi ret. Pada saat reset SP memiliki
alamat 07h, namun karena SP akan ditambahkan satu sebelum data
disimpan melalui perintah push, tumpukan data yang disimpan akan
dimulai pada alamat 08h. Alamat ini menempati memori internal 8051 SP
tidak bisa dialamati per bit.
2.1.5 Struktur Memori
Mikrokontroler MCS-51 memiliki kendali yang berbeda untuk mengakses
memori RAM atau memori data dan ROM atau memori program. Kendali untuk
memori program adalah PSEN dan kendali untuk memori data adalah RD.
Mikrokontroler MCS-51 memiliki lebar bus alamat 16 bit, sehingga memori dapat
diakses sebesar 2×64 KB. Memori program internal dipakai jika Pin EA
program akan diakses eksternal. Untuk memori data internal MCS-51 adalah
sebesar 128 byte. Jika dipakai memori data Eksternal dapat diakses sebesar 64
KB.
2.1.5.1 Memori RAM
Pemakaian RAM harus diperhatikan agar tidak tumpang tindih dengan
memori stack pointer (SP). Salah satu kesalahan mikrokontroler jika Pemakaian
RAM tumpang tindih dengan SP adalah memori pada RAM internal akan hilang
jika di reset. Tabel 2.2. memperlihatkan Struktur RAM 128 byte.Memori internal
RAM 128 byte bisa dibagi menjadi 3 area:
Tabel 2.2. Struktur RAM 128 byte
30H-7FH
20H-2FH
00H-1FH
1. Bank-bank Register
Bank register dibagi menjadi 4 grup yaitu bank 0 sampai bank 3. masing
masing bank menempati alamat sebesar 8 byte. Tabel 2.3. adalah susunan
bank-bank register.
Area scratch pad 80 byte
Area yang bisa dialamati per Bit (16 byte)
Tabel 2.3 Susunan bank-bank register
Alamat Bank Register RS1,RS0
00-07 Bank 0 00
08-0F Bank 1 01
10-17 Bank 2 10
18-1F Bank 3 11
Masing-masing alamat dalam satu grup diberi nama R0-R7. Alamat R0-R7
ditentukan oleh Bank register yang aktif saat itu.
Semua alamat R0-R7 bisa di alamati dengan model pengalamatan langsung.
R0 dan R1 juga bisa dialamati dengan model pengalamatan tak langsung. Pada
model pengalamatan tak langsung R0 dan R1 menyimpan alamat RAM internal
yang akan diakses.
2. Memori Yang Bisa Dialamati Per-Bit
Area ini menempati alamat 20H-2FH (16 Byte) sebagai byte dan
00H-07FH (128bit) sebagai alamat bit. Area memori ini berfungsi untuk menyimpan
tipe data bolean atau 2 keadaan.
Ada 2 cara untuk mengakses memori ini.
- Cara mengakses sebagai byte bisa dilakukan dengan pengalamatan
langsung, misal. Mov 20H, #20H. Akan menulis data 45 H ke alamat
20H.
- Pengaksesan secara bit dilakukan dengan mengakses alamat bit yang
bersangkutan,misal.
Akan memindahkan alamat pada bit ke-13 ke bit C (carry). Alamat
13H adalah bit ke-3 dari alamat 22H. Bahasa assembler MCS-51 memiliki
penulisan yang lain untuk mengakses bit ke-3 yaitu 22.3H,sehingga
Mov C,22.3H
3. Area Memori Scratch Patch
Area memori ini yang disebut area scratch patch memory menempati
alamat paling atas RAM internal sebesar 80 byte (alamat 30H-7FH). Area ini
hanya bisa diakses sebagai byte dengan mode pengalamatan langsung dan tak
langsung.
2.1.5.2 Memory ROM
ROM (read Only memory) isinya tidak berubah meskipun IC
kehilangan catu daya, dipakai untuk menyimpan program, Begitu catu daya ada
maka IC akan langsung reset dan akan menjalankan program-program yang ada
pada ROM. Sesuai dengan penggunaanya ROM disebut sebagai memori
program. Memori ROM hanya sebagai memori program dan tidak bisa di tulis ke
ROM saat mikrokontroler sedang bekerja.
2.1.5.3 Antar Muka Memori Eksternal
Memori program (ROM) dan memori data (RAM) eksternal diakses
dengan menggunakan P0 dan P2 sebagai bus data dan bus alamat. P0 akan
menyediakan jalur data yang di-multipleks dengan jalur alamat orde rendah
(A0-A7), dan P2 menyediakan jalur alamat orde tinggi (A8-A15). Konfigurasi
pengaksesan memori eksternal ditunjukkkan pada gambar 2.2. (EFROM 64 KB
dan RAM 32 KB). Konfigurasi ini memisahkan antara memori program(ROM)
dengan Memori data (RAM).Kendali sinyal baca untuk ROM adalah PSEN
sedangkan RAM mendapat sinyal baca dan sinyal tulis dari P3.7(RD) dan
P3.6(WR), sementara EPROM tidak mendapat sinyal kendali tulis. Pin EA
dihubungkan ke ground sehingga 8051 hanya akan melaksanakan
perintah-perintah yang tersimpan di EPROM eksternal.
P0, selain dihubungkan ke jalur data EPROM dan RAM, juga
dihubungkan dengan masukan latch agar alamat orde rendah (A0-A7) yang
dikeluarkan oleh P0 bisa dipisahkan dari jalur data EPROM. Pada saat P0
mengeluarkan alamat yang valid, ALE akan memberikan pulsa sehingga
sehingga IC latch akan menyimpan alamat ini dan memberikannya ke jalur
Alamat EPROM dan RAM. Bersamaan dengan itu, P2 akan mengeluarkan
alamat orde tinggi (A8-A15) yang secara langsung terhubung dengan jalur
alamat EPROM dan RAM.
PSEN akan diaktifkan 2 kali setiap satu siklus mesin saat membaca
program dari EPROM eksternal. Saat PSEN aktif (berlogika 0) EPROM akan
oleh mikrokontroler. Pada saat mengakses RAM, PSEN berada pada logika
tinggi.
Penulisan ke RAM dilakukan dengan mengaktifkan sinyal tulis (RD=1 dan
WR=0), CPU akan mengirimkan data ke RAM setelah terlebih dahulu
mengirimkan alamat RAM. Yang akan dituliskan. Sementara itu, pembacaan
dilakukan dengan mengaktifkan sinyal baca (RD=0 dan WR=1), CPU akan
memberikan alamat RAM yang akan dibaca, mengaktifkan sinyal baca dan
membaca data RAM dari jalur data.
Osilator
Osilator berfungsi untuk menyediakan sinyal clock dan pewaktuan bagi
semua perangkat internal 8051. Untuk menyediakan sinyal Clock digunakan
dengan dua cara yaitu:
1. Dengan menggunakan pembangkit frekwensi eksternal seperti pada
gambar 2.4.
Gambar.2.4. Pemakaian osilator eksternal
- Pin Xtal satu pada mikrokontroler 8051 dihubungkan ke
keluaran pembangkit frekwensi eksternal.
- Pin Ground pada pembangkit frekwensi eksternal
dihubungkan ke Ground pada mikrokontroler 8051.
2. Dengan menggunakan Kristal dan 2 kapasitor 30 pF dan 47 pF, Seperti pada
gambar 2.5.
Hal yang paling mendasar dari osilator sebenarnya adalah untuk
menentukan siklus mesin. Siklus mesin adalah waktu minimum yang diperlukan
oleh mikrokontroler untuk menjalankan satu perintah. Siklus mesin ini akan
menentukan kecepatan mikrokontroler (seberapa cepat mikrokontroler
menjalankan suatu perintah). Satu siklus mesin mikrokontroler 8051 adalah 12
kali periode frekwensi osilator (dengan frekwensi 12 Mhz), maka satu siklus
mesin adalah 1/12 dikali 12 Mhz.
Gambar 2.5 Pembangkit sinyal clock internal
Jadi kecepatan satu siklus mikrokontroler 8051 jika frekwensi pada
XTAL1 12 Mhz adalah 1 Mhz atau 1 mikro detik. Berarti untuk melakukan satu
perintah mikrokontroler 8051 hanya dalam satu mikro detik. Atau 1 juta perintah
2.1.6 Central Processing Unit (CPU)
CPU terdiri atas dua bagian, yaitu unit pengendali (control unit) serta
unit aritmetika dan logika (ALU). Fungsi utama unit pengendali adalah
mengambil, mengkode, dan melaksanakan urutan instruksi sebuah program yang
tersimpan dalam memori.
Unit pengendali menghasilkan dan mengatur sinyal pengendali yang
diperlukan untuk menyerempakkan operasi, aliran, dan instruksi program.Unit
aritmetika dan logika berfungsi untuk melakukan proses perhitungan yang
diperlukan selama program dijalankan serta mempertimbangkan suatu kondisi dan
mengambil keputusan yang diperlukan untuk instruksi-instruksi berikutnya.
2.2 Penggunanaan Softwere 8051 IDE
Softwere 8051 IDE ini digunakan untuk menulis program dalam bahasa
assembler. Setelah program assembler selesai ditulis kemudian di-save dan di
assemble. Program di assemble dengan tujuan untuk mengecek kesalahan
penulisan. Jika masih ada kesalahan penulisan, maka softwere 8051 memberi
peringatan, sehingga program dapat diubah sampai tidak ada pesan peringatan
lagi.
2.3 Penggunaan Softwere Downloader
Softwere downloader digunakan agar downloader dapat mendownload
komputer terhubung dengan alat downloader beserta mikrokontroler yang
digunakan.
Cara menggunakan softwere downloader adalah dengan meng-klik open
file untuk mengambil program assembler dari hasil kompilasi, kemudian klik Auto
programming untuk mengisikan hasil kompilasi tersebut ke mikrokontroler.
2.4. Mode-Mode Pengalamatan
Data atau operan bisa berada di tempat yang berbeda sehingga dikenal
beberapa cara untuk mengakses data tersebut. Inilah yang dikenal sebagai mode
pengalamatan. Beberapa mode pengalamatan yang dikenal antara lain:
2.4.1 Mode Pengalamatan Segera (immediate addressing mode)
Mode pengalamatan ini menggunakan konstanta. Data konstanta ini
merupakan data yang menyatu dengan instruksi. Contoh instruksinya:
MOV A, #20 h
Instruksi tersebut diatas mempunyai arti bahwa data konstantanya, yaitu
20h perlu disalin ke akumulator. Tanda ‘#’ dipakai untuk menunjukan bahwa data
berupa konstanta.
2.4.2. Mode Pengalamatan Langsung (direct addressing mode)
Cara ini dipakai untuk menunjuk data yang berada di suatu lokasi
memori. Contoh instruksinya:
MOV A, 30h
Instruksi ini mempunyai arti agar data pada alamat 30h diambil dan
instruksi diatas tidak menyertakan tanda ‘#’. Tanpa tanda ‘#’, maka data diartikan
sebagai alamat memori.
2.4.3 Mode Pengalamatan Tidak Langsung (indirect addressing mode)
Mode pengalamatan ini dipakai untuk mengakses data yang alamatnya
berada dalam suatu register. Contoh instruksi:
MOV A, @R0
Arti dari instruksi tersebut adalah data yang alamatnya berada di register
R0 disalin ke akumulator. Tanda “@” menyatakan bahwa alamat lokasi data
berada dalam suatu register. Jadi data tersebut sendiri tidak berada di R0. Yang
berada di R0 adalah alamatnya.
2.4.4 Mode Pengalamatan Register (register addressing mode)
Mode pengalamatan ini dipakai untuk mengakses suatu data yang
tersimpan dalam register. Contoh instruksi:
MOV A, R0
Arti dari instruksi diatas adalah bahwa data pada register R0 disalin ke
akumulator. Jadi, berbeda dengan mode pengalamatan tidak langsung yang
menjadikan register sebagai tempat penyimpanan alamat data, maka pada mode
pengalamatan register ini, data disimpan langsung di register.
2.4.5 Mode Pengalamatan Berindeks
Mode pengalamatan ini dipakai untuk mengakses data yang tersimpan
dalam memori program. Seperti yang telah dibahas sebelumnya, memori program
menyimpan data di memori program adalah karena memori program berupa ROM
(non-volatile) sehingga data tersimpan terus
menerus. Contoh instruksi:
MOVC, A, @A + DPTR
Arti instruksi diatas adalah data yang lokasinya disimpan di A+ DPTR
dipindahkan ke akumulator. Perhatikan bahwa perintah yang digunakan adalah
MOVC, bukan MOV. MOVC menandakan bahwa data yang diakses berada di
memori program sedangkan MOV digunakan untuk mengakses memori data.
2.5 Bus-Bus Pada AT89C51
1. Bus Alamat
Bus alamat berfungsi sebagai lintasan saluran pengalamatan antara
alat dengan sebuah computer. Pengalamatan ini harus ditentukan terlebih
dahulu untuk menghindari terjadinya kesalahan pengiriman sebuah
instruksi dan terjadinya bentrok antara dua buah alat yang bekerja secara
bersamaan.
2. Bus Data
Bus data merupakan sejumlah lintasan saluran keluar-masuknya data
dalam suatu mikrokontroler. Pada umumnya saluran data yang masuk sama
dengan saluran data yang keluar.
3. Bus Kontrol
Bus control atau bus pengendali ini berfungsi untuk menyerempakkan
operasi mikrokontroler dengan operasi luar.
Modulasi dapat diartikan dengan mengatur atau menyetel. Dalam bidang
telekomunikasi, modulasi berarti mengatur suatu parameter dari suatu pembawa
(carrier) berfrekuensi tinggi dengan pertolongan sinyal informasi yang
berfrekuensi lebih rendah. Modulasi amplitudo juga berarti suatu bentuk modulasi
dengan cara memvariasikan amplitudo sinyal pembawa secara proposional
berdasarkan frekuensi sinyal masukan, dengan frekuensi sinyal pembawa tetap
konstan. Tujuan utama dari proses modulasi adalah untuk mengefisiensikan
dimensi antena, karena kebanyakan sinyal - sinyal informasi yang dikirimkan
mempunyai orde kilohertz (kHz). Radiasi elektromagnetis yang efisien
menggunakan dimensi antena yang besarnya sama dengan panjang gelombang (_)
dari sinyal yang sedang dipancarkan. Hubungan antara frekuensi (f) dan panjang
gelombang (_) adalah:
λ= c
f = ... (1)
Gelombang pembawa selalu berbentuk sinusoida, perubahan antara
tegangan dan waktu dari gelombang dapat dinyatakan dengan Persamaan 2.2:
sin( ) max
e = Ec w t +q c ... (2)
Parameter - parameter yang dapat dimodulasi
adalah:
1. Ec maks untuk modulasi amplitudo (AM)
2. fc (atau _c=2_fc) untuk modulasi frekuensi (FM)
Pada modulasi amplitudo, proses modulasi dilakukan dengan cara
mengubah - ubah amplitudo gelombang pembawa sinusoidal. Sinyal yang
memodulasi ditunjukkan oleh Persamaan 2.3 :
E
m= Em t m c sinw
c max = ... (3)Pada sebuah situasi, sinyal baseband yang ditransmisikan memiliki dua
kemungkinan nilai informasi yaitu antara nol (0) dan satu (1). Karena
kemungkinan nilai informasinya tersusun dari dua keadaan tersebut, maka
selanjutnya sistem ini dikenal dengan ASK biner atau kadang lebih disukai
dengan menyebutnya sebagai BASK yang merupakan singkatan dari binary
amplitude shift keying. Bentuk sinyal termodulasi dalam hal ini dapat didekati
dengan sebuah persamaan matematik:
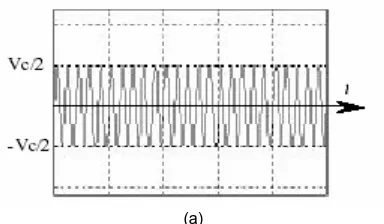
v(t) = Vc/2 [1 + mvm(t)]cos(2_ct)... (4)
dengan :
v(t) = sinyal termodulasi
Vc= amplitudo sinyal pembawa
vm = sinyal pemodulasi yang bernilai 1 atau 0
m = indek modulasi
Wc = 2μfc = frekuensi pembawa dalam nilai radian
Dihasilkan dua bentuk sinyal, dengan nilai vm(t) = 0 atau 1 untuk
mengirimkan nilai informasi biner nol (0) atau satu (1). vm(t) bisa juga bernilai 1
atau –1, sehingga dapat dipertimbangkan sebagai data bipolar ternormalisasi.
(a)
(b)
(c)
Gambar 2.6 Bentuk gelombang ASK dengan indek modulasi (a) m = 0 (b) m = ½ (c) m = 1
Sistem binary ASK memiliki dua macam amplitudo yang mungkin
membawa informasi, yaitu high untuk nilai informasi ‘1’ dan low untuk nilai
informasi ‘0’. Hanya satu bit untuk setiap pengiriman sebuah simbol. Untuk
meningkatkan laju bit, dapat dilakukan dengan cara mengirimkan lebih dari satu
bit untuk setiap simbol yang akan dikirimkan, sehingga tidak perlu
memperbesar lebar pita pada sistem komunikasi yang digunakan. Karena tetap
teknik ini dikenal sebagai M - ary ASK. Dengan M menyatakan banyaknya
kemungkinan amplitudo yang digunakan
untuk mewakili setiap informasi yang dikirimkan. Nilai M ini berkaitan dengan
jumlah bit/simbol yang dikirimkan.
Suatu teknik mendapatkan bit digital untuk data yang menggunakan
Amplitudo sebagai sinyal pembawanya. Dalam proses modulasi ini kemunculan
frekuensi gelombang pembawa tergantung pada ada atau tidak adanya sinyal
informasi digital.
Gambar 2.7: sinyal ASK
Modulasi digital merupakan proses penumpangan sinyal digital (bit
stream) ke dalam sinyal carrier. Modulasi digital sebenarnya adalah proses
mengubah-ubah karakteristik dan sifat gelombang pembawa (carrier) sedemikian
rupa sehingga bentuk hasilnya (modulated carrier) memiliki ciri-ciri dari bit-bit (0
atau 1).Pada dasarnya dikenal 3 sistem modulasi digital yaitu: ASK, FSK, dan
PSK.
Amplitude Shift Keying (ASK) adalah modulasi yang menyatakan sinyal
digital 1 sebagai suatu nilai tegangan tertentu (misalnya 1 Volt) dan sinyal digital
0 sebagai sinyal digital dengan tegangan 0 Volt. Sinyal ini yang kemudian
digunakan untuk menyala-mati-kan pemancar, kira-kira mirip sinyal morse.
Mekanisme kerja :
Apabila sinyal data mempunyai perbedaan dengan sinyal pembawa maka
bit digital adalah 1, dan apabila sinyal data sama dengan sinyal pembawa maka bit
digital adalah 0.
Frequency Shift Keying (FSK) atau pengiriman sinyal digital melalui
penggeseran frekuensi. Metode ini merupakan suatu bentuk modulasi yang
memungkinkan gelombang modulasi menggeser frekuensi output gelombang
pembawa. Pergeseran ini terjadi antara harga-harga yang telah ditentukan semula
dengan gelombang output yang tidak mempunyai fase terputus-putus.
Phase Shift Keying (PSK) atau pengiriman sinyal digital melalui
pergeseran fase. Metode ini merupakan suatu bentuk modulasi fase yang
memungkinkan fungsi pemodulasi fase gelombang termodulasi di antara
dari frekuensi gelombang pembawa berubah-ubah sesuai dengan perubahan status
sinyal informasi digital. Sudut fase harus mempunyai acuan kepada pemancar dan
penerima.
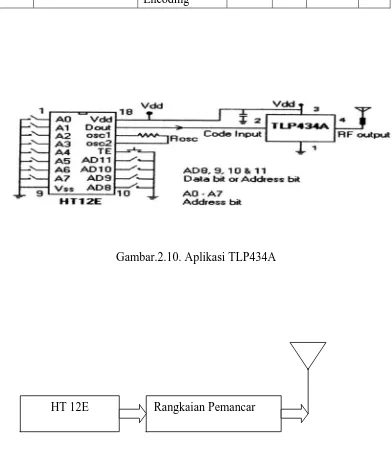
2.6.1 Pemancar TLP434A
Modul RF buatan LAIPAC ini sering sekali digunakan sebagai alat untuk
komunikasi data secara wireless. Biasanya kedua modul ini dihubungkan dengan
mikrokontroler atau peralatan digital yang lainnya. Input data adalah serial dengan
level TTL (Transistor Transistor Logic).
Jarak pancar maksimum dari modul RF ini adalah 100 meter tanpa
halangan dan 30 meter di dalam gedung. Ukuran ini dapat dipengaruhi oleh faktor
antena, kebisingan, dan tegangan kerja dari pemancar. Panjang antena yang
digunakan adalah 17 cm, dan terbuat dari kawat besi.
Pin 1: GND
Pin 2: Data in
Pin 3: Vcc
Pin 4: Antena (RF Output)
Frequency 315, 418 and 433.92 Mhz
Operation Voltage : 2- 12 Vdc Vcc Operating supply
Encoding
Gambar.2.10. Aplikasi TLP434A
Gambar 2,11. Blok diagram pemamcar
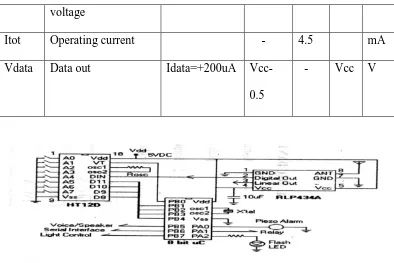
Tabel.2.8 data seat RPL434A
Simbol Parameter Conditions Min Typ Max Unit
Vcc Operating supply 3.3 5.0V 6.0 V
voltage
Itot Operating current - 4.5 mA
Vdata Data out Idata=+200uA
Vcc-0.5
- Vcc V
Gambar.2.12.B Aplikasi RLP434A
Gambar.2.13. Blok diagram pemancar
Rangkai pemancar TPL434A dan rangkain penerima RLP434A ini bayak
digunakan pada robot dan alat komkunikasi buatan manusia.
BAB III
RANCANGAN SISTEM
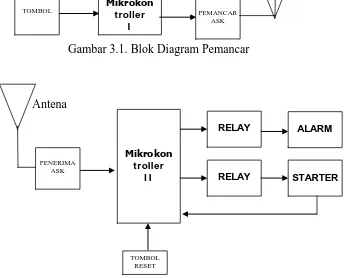
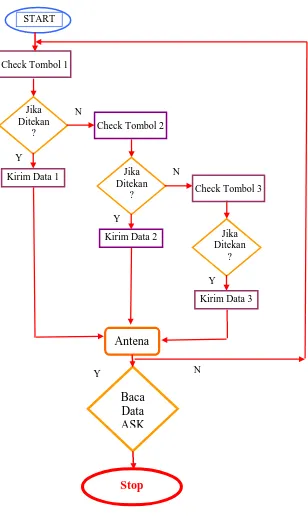
3.1 Perancangan Blok Diagram
Untuk mempermudah perancangan sistem digunakan diagram blok sebagai
langkah awal pembuatan sistem. Diagram blok menggambarkan secara umum
bagaimana cara kerja rangkaian secara keseluruhan. Dibawah ini dapat dilihat
diagram blok sistem yang akan dirancang. Pada gambar 3.1 dan 3.2
antena
Gambar 3.1. Blok Diagram Pemancar
Antena
Gambar 3.2. Blok Diagram Penerima
3.1.1. Blok Tombol
Blok ini merupakan Tombol untuk mengaktif atau menonaktifkan system
keamanan dari sepeda motor.
Fungsi tombol ada tiga yaitu:
1. Tombol satu untuk menon aktifkan kinci kontak sepeda motor.
2. Tombol dua untuk menghidupkan stater.
3. Tombol tiga untuk menghidupkan alaram pada sepeda motor.
3.1.2. Blok Mikrokontroller I
Blok ini berfungsi sebagai pembaca dan memproses data input Tombol
lalu mengirimkan inputan ke pemancar.
3.1.3. Blok Pemancar ASK (amplitodo shift keying)
Blok ini bertugas untuk memancarkan dan memproses data setiap terjadi
penekanan tombol.
3.1.4. Blok Mikrokontroller II
Berfungsi sebagai pengontrol atau pengendali semua kerja rangkaian,
dengan cara menerima data dari penerima lalu melakukan hidup matikan relay
berupa alarm dan starter.
3.1.5 Blok Relay
Blok ini ada dua fungsi yaitu: untuk mendrive alarm dan menghubungkan
kabel power battery menuju kunci kontak sepeda motor.
3.1.6. Blok Alarm
Blok ini berfungsi untuk membunyikan alarm saat ada orang yang
3.1.7. Blok Tombol Reset
Blok ini berfungsi untuk mematikan bunyi alarm dan mengembalikan ke
sistem awal.
3.1.8. Blok Starter
Blok ini berfungsi untuk menghidup dan matikan kendaraan saat relay
dalam kondisi aktif, blok ini juga akan menginformasikan ke mikrokontroller jika
kendaraan sudah dimatikan.
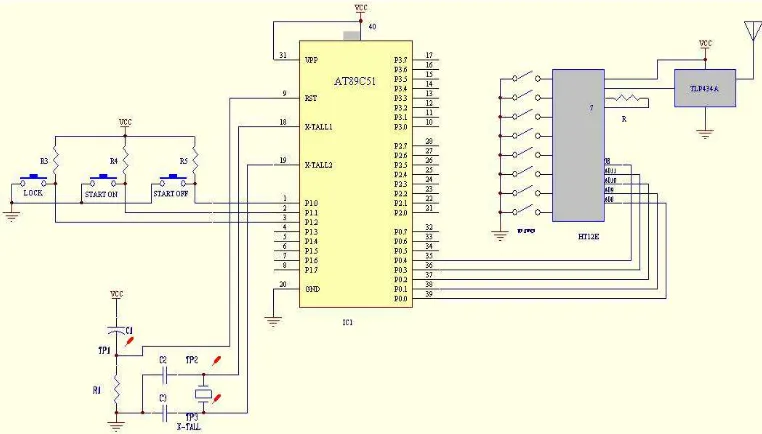
3.2 Perancangan Skematik Rangkaian 3.2.1. Rangkaian Mikrokontroller AT89C51
Rangkaian mikrokontroller ini merupakan pusat pengolah data dan pusat
pengendali data. Rangkaian ini tersusun atas osilator kristal 11,0592 MHz yang
berfungsi untuk membangkitkan pulsa internal dan dua buah kapasitor sebesar 30
pF yang berfungsi untuk menstabilkan frekuensi, dan terdapat kapasitor 10 uF dan
resistor 10 KΩ yang berfungsi untuk rangkaian reset. I/O yang digunakan pada
rangkaian mikrokontroller ini terdiri dari 6 input dan 1 output yang terletak pada
P3.1 atau pin Txd mikrokontroller AT89C51 . Untuk lebih jelasnya dapat dilihat
pada gambar 3.3 berikut ini.
X1
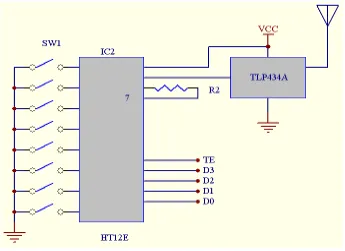
3.2.2. Rangkaian Pemancar
Setelah data dikodekan oleh HT12E, data dikirim ke TLP434A melalui pin 2 dari
TLP434A. Konfigurasi pin TLP434A ditunjukkan pada Gambar 3.4.
1 2 3 4
Pin 1 : pertanahan
Pin 2 : masukan data
Pin 3 : vcc
Pin 4 : antena
1 2 3 4
Gambar 3.4 TLP434A
Data yang dikirim HT12E ke TLP434A kemudian dimodulasi ASK dan
dipancarkan dengan daya pancar 14 dBm atau 25,12 mW. Karena Vdd yang
Gambar 3.5 HT12E-18 DIP-A
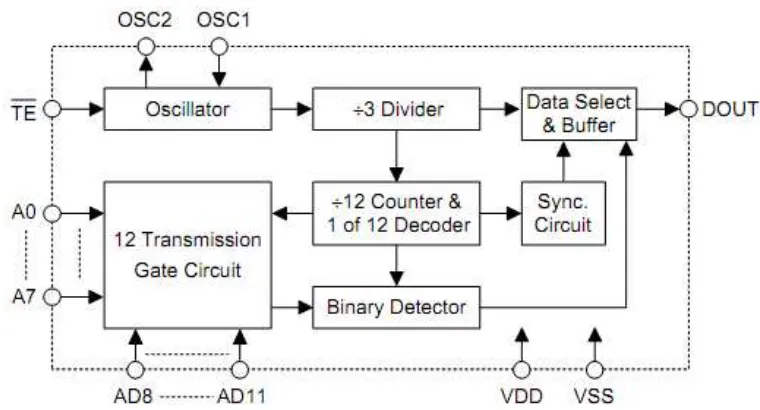
Gambar 3.6 Blok Diagram HT12E
HT12E mengkodekan informasi yang berisi 8 bit alamat dan 4 bit data.
Setiap alamat atau data masukan diatur dalam kondisi salah satu dari dua kondisi
logika (0 atau 1). Pada saat TE aktif low maka encoder ini memulai dengan
mentransmisikan sekumpulan 4 word secara berulang. Peredaran ini akan
Gambar 3.7 Timing diagram transmisi HT12E
Gambar 3.8 gelombang bit data/ Bentuk alamat HT12E
Gambar 3.8 menunjukkan bentuk gelombang bit alamat atau data dengan
tiap kondisi “1” atau “0” memiliki periode gelombang 3 kali dari periode fosc.
Status bit alamat atau data dapat diatur high atau low. Jika TE aktif low enkoder
akan memindai dan kemudian mentransmisikan keadaan dari 12 bit dari bit alamat
dan data secara serial. Pada saat pengiriman informasi, bit-bit ini ditransmisikan
dengan didahului bit untuk sinkronisasi. Jika Te aktif high maka HT12E berada
pada kondisi standby dengan mengkonsumsi arus kurang dari 1 μA untuk supply
sebesar 5 V. HT12E merupakan enkoder yang merupakan seri CMOS LSIs untuk
sistem kendali jarak jauh. HT12E dapat mengkodekan informasi yang berisi N
jumlah bit alamat dan 12-N bit data. Dalam Tugas Akhir ini digunakan 8 bit
sebagai bit alamat dan 4 bit sebagai bit data. Setiap bit alamat atau data masukan
low, maka enkoder ini memulai dengan mentransmisikan sekumpulan 4 word
secara berulang. Peredaran ini akan berulang terus selama TE terjaga pada kondisi
low. Pada saat TE high, enkoder melengkapi kumpulan terakhirnya dan berhenti.
Rangkaian ini bekerja bila pada input komponen HT12E diberikan data 4 bit.
Serta dengan memberikan logika 0 pada input TE (kaki di HT12E).bisa dilihat
pada gambar 3.8.dan gambar 3.9.
Gambar 3.9. Rangkaian Modul Pemancar ASK
Pada modul ini diberikan komponen dip switch pada HT12E berfungsi sebagai
Gambar.3.10. Skema Rangkain bagian pemancar.
Rangkaian modul pemancar ASK ini sama beroperasinya dengan
3.3. Pembuatan Layout Dan Pemasangan Komponen Ke PCB 3.3.1. Langkah – langkah pada pembuatan layout
Untuk mempermudah perencanaan PCB maka penulis membuat
keseluruhan system ini pada papan PCB. Dalam PCB yang digunakan adalah PCB
single layer. Papan PCB tersebut terdiri dari:
1. Rangkaian Sistem Minimum Mikrokontroler
Perancangan PCB ini dilakukan dengan membuat tata letak komponen
sesuai dengan unsur estetika dan pertimbangan fungsi- fungsi komponen. Dalam
pembuatan jalur PCB ini menggunakan Eagle . Ada beberapa hal yang perlu
diperhatikan dalam pembuatan jalur PCB, antara lain:
a. Menghindari pembelokan yang tajam pada jalur.
b. Membuat jalur yang sependek mungkin.
c. Menghindari terjadinya hubungan singkat.
d. Mengusahakan jumper seminim mungkin.
2. Merancang PCB dengan software EAGLE 5.60
Untuk merancang PCB pada tugas akhir ini penulis menggunakan software
EAGLE 5.60 adapun langkah langkah dalam melakukannya yaitu dengan cara
sebagai berikut:
a. Langkah pertama untuk mejalankan software adalah dengan membuka
menu eagle dari menu start atau langsung pada shortcut layer dengan
mengklik kiri dua kali, hingga muncul gambar seperti dibawah ini:
Gambar 3.12. control panel eagle 5.60
b. Setelah muncul lembar kerja, untuk memilih komponen yang akan
dipakai pada rangkaian pilih symbol berikut:
Gambar 3.13. lembar kerja eagle 5.60
a. Secematik rangkaian minimalis mikrokontroller
b.Proses konversi scematik menjadi layout
Gambar 3.15. pengubahan dari schematic menjadi layout
c. Menentukan display atau tampilan layer
Gambar 3.16. perngaturan warna tampilan
d. Kemudian memprint layout yang sudah selesai dari menu file
Gambar 3.18. layout finish
3.3.2. Penyablonan dan penbuatan jalur
1. Menyediakan papan PCB kosong
Gambar 3.19. Gambar PCB kosong
2. Penyablonan ke PCB
Gambar 3.21. Kertas kalender ditutup dengan kertas polos
Gambar 3.22. Penggosokan pada PCB
3. Penyucian PCB
Gambar 3.23. Prendaman PCB
Gambar 3.25. Hasil setelah selesai pelarutan
4. Pengeboran PCB
Gambar 3.26. Pengeboran papan PCB
5. Pemasangan komponen pada PCB
Gambar 3.27. Pemasangan komponen pada PCB
6. Penyolderan Kaki Komponen
Setelah pembuatan PCB selesai, langkah selanjutnya adalah
pemasaagan komponen pada PCB, sebelum komponen dipasang pada PCB
hendaknya komponen yang digunakan diuji dan diukur terlebih dahulu dengan
ini dilakukan dengan memperhatikan beberapa hal yang berhubungan dengan
kondisi komponen antara lain:
a. Waktu dan lamanya penyolderan jangan terlalu lama untuk menghindari
rusaknya komponen.
b. Menggunakan pengamanan untuk komponen tertentu yang sensitif
terhadap panas seperti soket IC, bertujuan untuk mempermudah
penggantian IC bila mengalami kerusakan.
Gambar 3.28. Penyolderan kaki komponen
3.4. Pengcompile Program
Langkah – langkah pengcompile program :
1. Membuat program pada notepad dengan nama file AT89C51.
2. Menyimpan program dengan ekstensi (*.asm) ke dalam folder ASM51.
3. Mengetik nama file yang akan dicompiler pada command promp.user yang
sudah tersimpan pada folder ASM 51 yang terdapat pada gambar 3.29 dan
Gambar 3.29. Command promp.user
3.5. Pengisian Program Dari DT-HIQ Programmer
Langkah – langkah untuk pengisian program dari DT-HIQ ke dalam IC
AT89C51 :
1. Menghubungkan DT-HIQ programmer dengan computer dan catudaya
yang terdapat pada gambar 3.30.
2. Masukkan IC AT89C51 ke dalam soket ZIF pada DT-HIQ
programmer.
3. Ambil kode dengan perintah “ Load File”. Dan buka file AT89C51.
4. Deteksi IC AT 89C51 dengan perintah “MCS-51 Device Detect”.
5. Memprogram IC AT89C51 dengan perintah “Auto”. Untuk
melakukan perintah “Auto”, klik tombol Auto programming.
6. Proses pemrograman akan ditampilkan pada status bar. Saat
pemrograman sudah selesai, maka akan tampil tulisan “Verify
Gambar 3.30 Hubungan antara DT-HiQ programmer, PC, dan CatuDaya
Pada saat pengisian program ke IC AT89C51 maka kita membuka
DT-HIQ Programmer maka maka mengambil perintah load file dan membuka file
HEX yang terdapat pada gambar 3.31
Gambar 3.31. Program sebelum masuk ke IC
Setelah program masuk ke IC AT89C51 maka tampilan pada DT-HIQ
programmer terdapat pada gambar 3.26..
7. Fungsi Toolbar
Load File : Membuka file Intel HEX atau file biner dan
memasukann ke dalam File buffer.
Save File : Menyimpan isi Read Buffer ke dalam file Intel
HEX atau file biner.
Blank Check : Memeriksa apakah IC target kosong.
Erase : Menghapus IC target.
Read Code : Membaca memori program Ic target dan
memasukkannya ke dalam memori Read buffer.
Write Code : Menulis kode yang tersimpan dalam file buffer ke
dalam memori program IC target.
Verify Code : Membandingkan isi file buffer dan memori
program IC target.
Auto
Programming: Menjalankan serangkaian instruksi. Memori
program
IC target akan dihapus, diperiksa kekosongannya,
MCS-51
Device Detect : Mendeteksi secara otomatis jenis IC target
MCS-51.
AVR
Device Detect : Mendeteksi sacara otomatis jenis IC target AVR.
3.6. Variabel Yang Diamati
1. Pembuatan Hardware.
2. Pembuatan Software.
BAB IV
HASIL DAN ANALISA PENGUJIAN
4.1 Hasil Perancangan
Tabel 4.1 Data Hasil Perancangn Pengujian Saat Power On Reset
Titik Pengukuran
Power on
TP1 H → L
TP2 H ↔ L
TP3 L
Tabel 4.2. Titik Pengukuran pada Driver Relay
Kondisi TP4 TP5 TP6
Sirene Hidup 1 (4,9V) 1 (4,9V) 0 (0,3mV)
Sirene Mati 0 (0,32V) 0 (0,4V) 1 (4,95V)
Tabel 4.3 Data Hasil Pengujian Rangkaian Tombol
Kondisi tombol Vin (P3.7 & P3.5)
Ditekan 0,3 V
Tidak ditekan 4,9V
Pengujian dilakukan setelah pekerjaan assembling selesai. Pengujian ini
dilakukan dengan cara pengukuran.. Sebelum melakukan pengukuran, kita harus
pengukuran. Adapun peralatan-peralatan yang mendukung didalam pengukuran
tersebut adalah logik probe.
4.1.1 Analisa Pengujian Rangkaian Pemancar ASK
Gambar. 4.1. Rangkaian Pemancar ASK
Pada rangkaian Pemancar ASK terdiri atas komponen HT12E dan
pemancar TLP434A. Proses pengiriman data dilakukan dengan cara memasukkan
data pada D0 hingga D3, lalu dengan memberi pulsa 1 ke pin TE maka data akan
terkirim secara serial ke modul ASK. Pemasangan DIP Switch 8 bit adalah
berfungsi sebagai address bit yang datanya harus sama dengan DIP Switch yang
dipasang pada rangkaian penerima ASK agar data yang dikirim akan dapat
diterima oleh rangkaian penerima.
Untuk pengukuran pada kaki D0 hingga kaki D3, akan bergantung data
yang dikirimkan oleh mikrokontroller, saat diberikan logika 1 maka akan terukur
4.1.2 Analisa Pengujian Sistem Mikrokontroler AT89C51
Bagian ini merupakan pemroses keseluruhan dari sistem ini. Rutin yang
dikerjakan ditulis dalam bahasa assembling yang selanjutnya didownload pada
memori internal yang tersedia.
Mikrokontroler ini buatan ATMEL yang kompatibel dengan keluargan
MCS-51, di dalamnya terdapat 4 Kbyte of In-System Reprogrammable Flash
Memory, dengan 32 jalur I/O. 128 Bytes RAM. Pada rangkaian ini semua port
dipakai (P0, P1, P2, P3) sebagai input dan output. Rangkaian eksternal sebagai
pembangkit frekuensi yang dipakai sesuai karakteristiknya yaitu pada C2, C3 dan
XTAL sedangkan untuk rangkaian reset dipergunakan komponen C1 dan R1.
Dalam pengujian didapat hasil pengukuran seperti tabel 4.1 :
X1
Vcc
RST
R1
Vcc
RST
R1
C1 Arus dari kaki Vcc
mengalir ke kaki RST
(a) (b)
Gambar 4.3. Aliran Arus dan Perubahan Tegangan pada Reset Otomatis
Pada saat sumber daya diaktifkan, maka kapasitor C1 sesuai dengan sifat
kapasitor akan terhubung singkat pada saat itu sehingga rangkaian ekivalennya
tampak pada gambar 4.4a. Arus mengalir dari VCC langsung ke kaki RST
sehingga kaki tersebut berlogika 1.
Kemudian kapasitor terisi hingga tegangan pada kapasitor (Vc) yaitu
tegangan antara Vcc dan titik antara kapasitor C1 dan resistor R1 mencapai Vcc,
otomatis tegangan pada R1 atau tegangan RST akan berlogika 0 (gambar 4.3b) dan
proses reset selesai.
4.1.3 Analisa Pengujian Rangkaian Driver
Jika mikrokontroler mengirimkan perintah berupa logika 1 untuk
mengaktifkan 4N25, maka optocoupler akan aktif dikarenakan infra merah akan
ON (akan menyinari photo transistor) sehingga kolektor dan emitor dari photo
transistor akan bersambung dan akan mengakibatkan arus dari Vcc akan mengalir
melalui kolektor menujur emitor dari photo transistor hingga akan masuk ke kaki
basis dari Transistor BC547 dan mengakibatkan Transistor BC547 akan ON atau
aktif sebagai saklar. Sebelumnya data dari Ground akan mengalir ke basis dari
transistor BC547 yang mengakibatkan transistor Cut Off.
Saat Transistor BC547 ON maka arus dari Ground akan mengalir dari
emitor menuju kolektor dari Transistor BC547, dengan demikian arus dari Ground
tersebut akan mengaktifkan relay dan mengakibatkan posisi relay menjadi ke
Normaly Open (NO). Jika Transistor dalam keadaan CUT Off (data pada base
berlogika 0) maka relay pada posisi normally close. Pada saat relay aktif pada
kondisi normally open, maka relay bertindak sebagai saklar dan mengalirkan
tegangan 12V terhadap beban Sirene ataupun menghubungkan ke sistem
pengapian.
Dalam hal perhitungan besarnya tegangan dan arus yang masuk ke dalam
4N25 dapat kita lihat pada datasheet 4N25. Dimana arus input forwardnya adalah
sebesar 10 mA, sedangkan tegangan input forwardnya adalah sebesar 1.50 V atau
sebesar 1500 mV.
Jika dilihat pada datasheet transistor BC547, maka transistor BC 547 merupakan
mA
IC =100 , dimana IC merupakan sumber besar arus yang masuk kedalam relay,
sehingga besarnya arus yang masuk kedalam base transistor BC547 adalah:
B
Sedangkan nilai dari IE adalah:
IE = IB + IC = 101 mA
Setiap relay yang digunakan pada perancangan alat ini mampu
mengendalikan beban hingga 2A. Adapun hasil pengukuran yang di dapat pada
titik pengukuran di atas adalah sebagai berikut:
Pada pengukuran yang dilakukan dengan menggunakan logic probe, saat sirene
on, maka pada TP4 berlogika 1, pada TP5 akan berlogika 1 juga sedangkan pada
TP6 akan berlogika 0 atau tegangan mendekati 0V. Pada saat sirener off, maka
pada TP4 akan berlogika 0, pada TP5 akan berlogika 0, sedangkan pada TP3 akan
berlogika 1.
4.1.4. Analisa Pengujian Rangkaian Tombol
Pengujian rangkaian tombol starter on dan tombol reset bertujuan untuk
mengetahui bahwa rangkaian tombol dapat menghidupkan kendaraan ataupun
Gambar 4.5. Pengujian Rangkaian Tombol
Dari hasil pengujian diperoleh bahwa ketika tombol tidak ditekan
tegangan keluaran yang terukur sebesar 4,9V dan ketika ditekan tegangan
keluarannya 0,3V. Hasil pengujian ini sesuai dengan yang diinginkan pada
perancangan karena sesuai dengan prinsip kerja dari tombol pull-up yaitu ketika
tombol ditekan menghasilkan logika rendah dan ketika tidak ditekan
menghasilkan logika tinggi.
4.2. Analisa Software
4.2.1. Analisa Software Pemancar
Pada proses pembuatan program selalu diawali dengan penempatan awal
dari program, hal ini dilakukan dengan pemberian alamat awal 0000h seperti
pada perintah dibawah ini :
org 0000h
Kemudian pada rutin start, pertama-tama program akan melakukan
pengecekan terhadap tombol-tombol yang sebelumnya masing-masing telah
dihubungkan ke masing-masing pin dari IC mikrokontroler 89C51 yaitu port P1.
Selanjutnya program akan membandingkan isi dari port P1 dengan data
sama maka program akan membandingkan dengan data 00000101b, jika sama
maka program akan lompat ke rutin data2, namun jika tidak sama maka program
akan membandingkan dengan data 00000011b, jika sama maka program akan
lompat ke rutin data3, namun jika tidak sama maka program akan lompat kembali
ke start.
Pada rutin data1 pertama-tama program akan memasukkan data 11101110b
ke port P0, diikuti dengan lompat ke rutin delay lalu kemudian pada pin p0.4
diberi logika 1 dan diikuti dengan lompat ke rutin start.
data1: mov p0,#11101110b
call delay
setb p0.4
jmp start
Pada rutin data2 pertama-tama program akan memasukkan data 11101101b
ke port P0, diikutin dengan lompat ke rutin delay lalu kemudian pada pin p0.4
data2: mov p0,#11101101b
call delay
setb p0.4
jmp start
Pada rutin data3 pertama-tama program akan memasukkan data 11101100b
ke port P0, diikutin dengan lompat ke rutin delay lalu kemudian pada pin p0.4
diberi logika 1 dan diikuti dengan lompat ke rutin start.
data3: mov p0,#11101100b
call delay
setb p0.4
jmp start
Subroutine delay berisikan proses penundaan waktu yang dilakukan pada
saat setiap beep akan di hidupkan. Lamanya waktu tunda yang diberikan
bergantung dari nilai r1, r2 dan r3, apabila nilai tersebut dinaikkan maka akan
menyebabkan penundaan waktu yang lebih lama. Demikian sebaliknya jika nilai
r1, r2,dan r3 dikurangi/dikecilkan maka akan mengakibatkan penundaan waktu
ret
Pada akhir dari program akan selalu diakhiri dengan perintah end.
End
4.3 Gambar Hasil
4.3.1 Gambar bagian pemancar
Gambar.4.6 Tombol pada remote Gambar.4.7 Pemancar dengan
HT12E
Gambar 4.9 Tampilan remote control
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari hasil kerja alat dapat diambil beberapa kesimpulan dalam pembuatan
alat ini. Kesimpulan yang diambil oleh penulis adalah :
1. Mikrokontroler mengirimkan data serial ke rangkaian penerima ASK,
dengan menggunakan clock maka data serial tersebut diubah menjadi data
parallel. Dengan adanya data parallel tersebut dapat menghidupkan alaram
dan stater pada kendaraan sesuai dengan yang diinginkan.
2. Dari hasil penelitian,terlihat bahwa data yg diterima RLP434A dari
pengiriman TLP434A hampir sama, hal ini menunjukkan bahwa
RLP434A dapat menerima data dan TLP434A dapat mengirim data sesuai
yang diinginkan.
5.2 SARAN
1. Agar dilakukan peningkatan alat ini sehingga bisa dikemas sekecil
mumngkin, agar pemakaian atau pemasangan dikendaran roda dua tidak
terlalu rumit.
2. Penulis mengharapkan agar teman-teman mahasiswa khususnya prodi
fisika instrumentasi dapat melakukan penelitian lanjutan untuk
DAFTAR PUSTAKA
Usman. 1991.Teknik Antar Muka +Pemograman Mikrocontroler AT689S52.
Jakarta. Penerbit: Andi
Tim Lab Mikroprosesor Elektronika BLPT Surabaya. 2006. Pemograman
Mikrocontroler AT89S51 Dengan C/C++M dan Assembler. Surabaya.
Penerbit : Andi
Suhata,ST. 2005. VB Sebagai Pusat Kendali peralatan Elektronika. Jakarta.
Penerbit : PT Alex media komputindo
http:
http:// www.ASK.blogspot.com