PENG
BER
GEMBA
GULMA
RBASIS M
IN
ANGAN M
A PADA
MULTI A
MOHAM
SEKOLAH NSTITUT P
METODE
PERTAN
AGEN K
MAD SOLA
H PASCASA PERTANIA
BOGOR 2013
E PENG
NIAN PR
KOMPUT
AHUDIN
ARJANA AN BOGOR
GENDALI
RESISI
TASION
R
IAN
PERNYATAAN MENGENAI DISERTASI DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa disertasi Pengembangan Metode Pengendalian Gulma pada Pertanian Presisi berbasis Multi Agen Komputasional adalah karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Bogor, April 2013
ABSTRACT
MOHAMAD SOLAHUDIN. Development of Weed Control Method in Precision Farming Based on Multi Agent Computing. Supervised by KUDANG BORO SEMINAR, I WAYAN ASTIKA and AGUS BUONO.
Weed control practices commonly performed on crop farming are pre-emergence during land preparation and after planting. Weed control in land preparation activities are carried out with a view to facilitate the work of machinery and equipment, while post emerge applications done with a view to ensure main crops can survive in the critical period which the competition of main crop and weeds tend to be very tight. Machine vision system allows monitoring of plant diseases or nutrient deficiencies for proper treatment. Selection of weed control scenarios in agricultural land varies considerably depending on several factors. Failure of weeds control is not only caused by errors in identifying weed species, density and selection of herbicides attack but also weather conditions such as wind, temperature, relative humidity and rainfall affect the effectiveness of spraying applications and potential waste by run-off and drift. Supervisory system allows users to select the type of technology and the best weed control scenario. The purpose of this research are : 1) to design supervisory system to determine the type of technology and rate of the herbicide applicator and spray the control precision farming practices based on multi-agent systems and 2) to design the method to identify main plants and weeds, and weeds attack density analysis using the parameters contained in the image. The supervisory system design consists of user preference and dialogue, knowledge module and an inference engine. Knowledge modul contains a collection of several modules related to weed control including the basis of intelligent systems, technologies database, and parallel computing base. Multi intelligent agents on the basis of intelligent system modules were involved in weed control activities in accordance with the needs on the field. Forward velocity target is achieved by operating multiple processors in parallel where each processor is dedicated to perform a particular job through an intelligent agents. Location accuracy and spraying dosage accuracy are designed by dividing the image into several segments in accordance with the size of the applicator width. Image partition method gives an application map that will guide the equipment to distribute the herbicide more precisely in therm of dose and location. In a pre-emerge application during land preparation, weed control system with 4 agents showed speed up values of 3.775 on 100 000 to unlimited the number of jobs, with an efficiency of 93.88%. While on post emerge application, weed control system with 4 agents shows the value of speed up reaches 3.814 on 100 000 to unlimited the number of jobs with an efficiency of 95.35% .
MOHAMAD SOLAHUDIN. Pengembangan Metode Pengendalian Gulma pada Pertanian Presisi Berbasis Multi Agen Komputasional. Di bawah bimbingan : KUDANG BORO SEMINAR, I WAYAN ASTIKA , dan AGUS BUONO. 2013.
RINGKASAN
Pertanian presisi merupakan aplikasi informasi dan teknologi pada sistem pengelolaan pertanian untuk mengidentifikasi, menganalisa, dan mengelola informasi keragaman spasial dan temporal di dalam lahan untuk mendapatkan keuntungan optimum, berkelanjutan, dan menjaga lingkungan. Sebaran serangan gulma pada lahan pertanian, serangan penyakit atau kekurangan hara mempengaruhi pertumbuhan tanaman dan hasil, seringkali hal tersebut ditunjukkan melalui pewarnaan daun yang luar biasa atau tidak teratur dan pola kehitaman pada daun-daun tanaman. Persaingan antara gulma dengan tanaman utama dalam mengambil unsur-unsur hara dan air dari dalam tanah dan penerimaan cahaya matahari untuk proses fotosintesis, menimbulkan kerugian-kerugian dalam produksi baik kualitas maupun kuantitas. Cramer (1975) dalam Lloyd T Evans (1993) menyebutkan kerugian berupa penurunan produksi dari beberapa tanaman adalah sebagai berikut ; padi 10.8 %, sorgum 17.8 %, jagung 13%, tebu 15.7 %, coklat 11.9 %, kedelai 13.5 % dan kacang tanah 11.8 %.
Pengendalian gulma pada kegiatan pertanian presisi dalam kondisi normal dilakukan dua kali, yaitu pengendalian gulma pra-tanam dan pengendalian gulma pasca-tumbuh. Kegagalan pengendalian gulma tidak hanya disebabkan oleh kesalahan dalam mengidentifikasi jenis gulma, kepadatan serangan dan pemilihan herbisida. Kondisi cuaca seperti angin, suhu, kelembaban relatif dan curah hujan mempengaruhi efektivitas aplikasi penyemprotan dan potensi pemborosan oleh run-off dan drift. Sistem Supervisori akan memandu pengguna dalam menentukan jenis teknologi dan skenario pengendalian gulma yang paling cocok dengan kebutuhan sebelum kegiatan penyemprotan dilakukan.
Penelitian ini mempunyai tujuan : 1) mendesain sistem supervisori untuk menentukan jenis teknologi dan kapasitas aplikator cairan, serta mengontrol kegiatan penyemprotan pada praktek pertanian presisi berbasis sistem multi agen, 2) melakukan identifikasi tanaman pokok dan gulma dan analisa kepadatan serangan gulma dengan menggunakan parameter yang terkandung dalam citra hasil tangkapan camera vision.
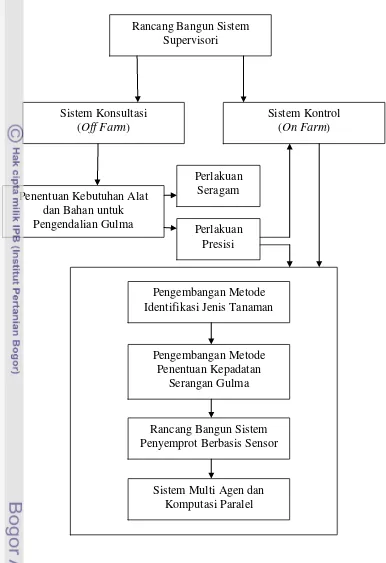
Metode penelitian yang dilakukan meliputi desain sistem supervisori, desain aplikator cairan, dan desain sistem multi agen. Desain multi agen difokuskan pada desain sistem cerdas yang dibutuhkan pada tiap tahap kegiatan pengendalian gulma. Berdasarkan metode tersebut, maka penelitian terbagi menjadi beberapa bagian yang meliputi : rancang bangun sistem supervisori, desain sistem cerdas untuk identifikasi tanaman, desain sistem cerdas untuk mendeteksi serangan gulma, desain aplikator cairan (penyemprot), dan perancangan sistem multi agen.
Penggunaan sistem cerdas dimesi fraktal untuk pemberantasan gulma pada minggu ke-4 pratumbuh dengan perangkat camera vision sebagai sensor dapat dilakukan, karena sistem pendeteksi keberadaan gulma di lahan mampu dengan jelas membedakan antara tanaman pokok dan gulma berdasarkan nilai dimensi fraktal masing-masing tanaman. Hasil validasi sistem pada pengenalan tanaman jagung menunjukkan akurasi 88.64% sedangkan pada tanaman kacang tanah menghasilkan akurasi 92.59%. Kemampuan sistem dalam mengidentifikasi gulma memiliki akurasi 71.43%, hal ini disebabkan pada kasus gulma yang tidak dikontrol penampakan beberapa gulma akan memiliki bentuk menyerupai tanaman pokok. Hasil training penentuan tingkat kepadatan serangan gulma dengan metode non-parametrik Bayes menghasilkan akurasi 100%, dan validasi dengan data citra yang berbeda menunjukkan akurasi sebesar 94%.
Desain aplikator cairan menggunakan sprayer elektrik yang dikontrol dengan PWM (Pulse Width Modulator) untuk mengatur debit penyemprotan. Analisa penyemprotan secara overlap untuk menghasilkan lebar penyemprotan 136 cm memerlukan overlap antar penyemprotan sebesar 45% dengan jarak antar nozzle 53.5 cm.
Analisa komputasi paralel dengan metode pipeline dilakukan dengan membagi sistem ke dalam beberapa agent. Peningkatan nilai speed up diukur sebagai parameter utama dalam penerapan komputasi paralel. Pada sistem pengendalian gulma tahapan praolah dimana sebuah pekerjaan dibagi menjadi 5 proses yang melibatkan 4 prosesor menunjukkan nilai speed up mencapai 3.775 pada jumlah pekerjaan 100 000 sampai tak hingga dengan efisiensi sebesar 93.88%. Sedangkan pada sistem pengendalian gulma tahapan pascatumbuh pekerjaan dibagi menjadi 6 proses yang melibatkan 4 prosesor menunjukkan nilai speed up mencapai 3.814 pada jumlah pekerjaan 100 000 sampai tak hingga dengan efisiensi sebesar 95.35%. Penggunaan sistem multi agen akan mempersingkat waktu proses, sehingga nilai kecepatan maju dan kapasitas kerja dari VRT menjadi lebih besar.
© Hak Cipta milik IPB, tahun 2013 Hak Cipta dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan yang wajar IPB
PENGEMBANGAN METODE PENGENDALIAN
GULMA PADA PERTANIAN PRESISI
BERBASIS MULTI AGEN KOMPUTASIONAL
MOHAMAD SOLAHUDIN
Disertasi
sebagai salah satu syarat untuk memperoleh gelar Doktor
pada
Program Studi Ilmu Keteknikan Pertanian
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
Judul Disertasi : Pengembangan Metode Pengendalian Gulma pada Pertanian Presisi Berbasis Multi Agen Komputasional
Nama : Mohamad Solahudin
NIM : F164080011
Disetujui Komisi Pembimbing
Prof. Dr. Ir. Kudang Boro Seminar, M.Sc Ketua
Dr. Ir. I Wayan Astika, M.Si Anggota
Dr. Ir. Agus Buono,. M.Si, M.Kom Anggota
Diketahui oleh
Ketua Program Studi
Dr. Ir. Wawan Hermawan, M.S
Tanggal Ujian : 15 Maret 2013
Dekan Sekolah Pascasarjana
Dr. Ir. Dahrul Syah, M.ScAgr
PRAKATA
Puji syukur penulis ucapkan atas kehadirat Allah SWT atas berkat, rahmat, dan karunia-Nya sehingga penulis mampu menyelesaikan penulisan laporan akhir disertasi doktoral dengan judul Pengembangan Metode Pengendalian Gulma pada Pertanian Presisi Berbasis Multi Agen Komputasional.
Dalam penulisan dan penyusunan laporan akhir ini, penulis tidak dapat menyelesaikannya tanpa bantuan, arahan, dan bimbingan dari berbagai pihak. Oleh karena itu, penulis ingin mengucapkan terima kasih kepada :
1. Prof. Dr. Ir. Kudang Boro Seminar, M.Sc, selaku ketua komisi pembimbing atas bimbingan dan arahan yang telah diberikan kepada penulis.
2. Dr. Ir. I Wayan Astika, M.Si. dan Dr. Ir. Agus Buono, M.Kom, M.Si. selaku anggota komisi pembimbing yang banyak memberikan masukan dan arahan selama penelitian.
3. Dr. Ir. Widodo, MS dan Dr. Ir. Wawan Hermawan, MS selaku dosen penguji Ujian Tertutup, atas segala koreksi dan masukannya.
4. Prof. Dr. Ir. H. Roni Kastaman, MT dan Dr. Ir. Radite Praeko Agus Setiawan, M.Agr. selaku dosen penguji pada Ujian Terbuka, atas saran dan masukannya. 5. Yan Yonathan Rotinsulu atas bantuannya dalam penyusunan rangkaian
elektronik dan data-data penelitian pendahuluannya.
6. Program beasiswa pascasarjana (BPPS) yang telah membantu membiayai penulis selama melakukan studi.
7. Program Hibah Penelitian Doktor dan IMHERE yang telah menyediakan dana bagi kegiatan penelitian.
8. Departemen Teknik Mesin dan Biosistem atas bantuan peminjaman peralatan dan kebun percobaan.
9. Jajaran direksi PT Nanco Sejahtera, perkebunan Fazenda Santa Branca, Cementes Mutuca dan Fazenda Sao Rafael di Brasil yang telah menyediakan fasilitas boom sprayer untuk studi banding aplikasi penyemprotan.
10. Semua pihak yang banyak memberikan kontribusi baik moril maupun materiil selama penulis menjalankan studi.
Akhirnya penulis berharap semoga tulisan ini memberikan manfaat dan kontribusi yang nyata terhadap perkembangan ilmu pengetahuan di bidang teknologi pertanian. Penulis juga berharap masukan dan kritikan yang menyempurnakan tulisan ini dari berbagai pihak.
Bogor, April 2013
Penguji pada Ujian Tertutup : Dr. Ir. Widodo, MS
Dr. Ir. Wawan Hermawan, MS
Penguji pada Ujian Terbuka : Prof. Dr. Ir. H. Roni Kastaman, MT
i
Ruang Lingkup Penelitian 4
Manfaat Penelitian 4
Nilai Kebaruan Penelitian 5
2. TINJAUAN PUSTAKA 6
Pertanian Presisi 6
Gulma 14
Sistem Multi Agen 24
Pemrosesan Paralel 28
Analisa Dimensi Fraktal 31
Metode Klasifikasi Non-parametrik Bayes 31
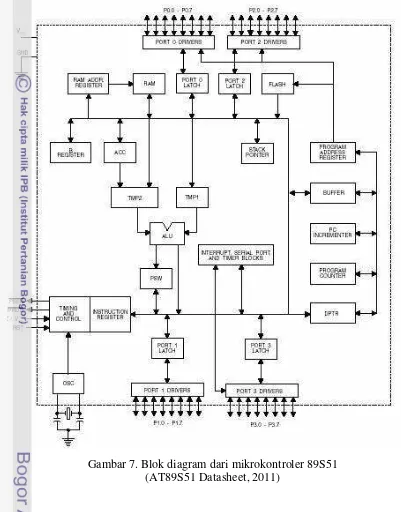
Mikrokontroler 32
Modulasi Lebar Pulsa 37
Penelitian Terdahulu 38
3. METODE 45
Metode Penelitian 45
Waktu dan Lokasi Penelitian 45
Bahan dan Alat 46
Prosedur Penelitian 47
Jenis Analisa Kinerja 53
4. RANCANG BANGUN SISTEM SUPERVISORI 54
Pendahuluan 54
Metode 54
Hasil dan Pembahasan 56
Simpulan 77
5. IDENTIFIKASI JENIS TANAMAN 78
ii
Metode 79
Hasil dan Pembahasan 81
Simpulan 93
6. PENDETEKSIAN SERANGAN GULMA 94
Pendahuluan 94
Metode 94
Hasil dan Pembahasan 98
Simpulan 108
7. RANCANG BANGUN APLIKATOR CAIRAN 110
Pendahuluan 110
Metode 110
Hasil dan Pembahasan 111
Simpulan 130
8. PERANCANGAN SISTEM MULTI AGEN 131
Pendahuluan 131
Metode 132
Hasil dan Pembahasan 141
Simpulan 155
9. PEMBAHASAN UMUM 157
10. SIMPULAN DAN SARAN 164
Simpulan 164
Saran 167
DAFTAR PUSTAKA 168
iii
DAFTAR TABEL
Tabel 1. Jenis dan takaran herbisida untuk pengendalian gulma. 21 Tabel 2. Selektifitas beberapa herbisida penting. 22 Tabel 3. Pedoman pemilihan herbisida berdasarkan komposisi gulma dominan. 22 Tabel 4. Herbisida yang dianjurkan untuk pengendalian gulma pada tanaman
pokok jagung. 23
Tabel 5. Kapabilitas agen 27
Tabel 6. Hubungan antara tingkat kehijauan citra dan aksi yang dilakukan 39 Tabel 7. Panduan penyemprotan pada berbagai kecepatan angin 58 Tabel 8. Volume penyemprotan teoritis pada berbagai jenis nozzle dan
beberapa kecepatan maju traktor. 72
Tabel 9 . Nilai dimensi fraktal tanaman kacang tanah pada berbagai umur 89 Tabel 10. Nilai dimensi fraktal tanaman jagung pada berbagai umur. 89 Tabel 11. Hasil uji validasi sistem identifikasi jenis tanaman pada tanaman
pokok jagung. 92
Tabel 12. Hasil uji validasi sistem identifikasi jenis tanaman pada tanaman
pokok kacang tanah. 92
Tabel 13. Penentuan kelas kepadatan pada metode pengkelasan bertingkat. 97 Tabel 14. Nilai klasifikasi tingkat kepadatan gulma secara bertingkat. 97 Tabel 15. Batas nilai RGB pada proses Thresholding (Saputra, 2011) 98 Tabel 16 . Nilai kombinasi hasil pengolahan gambar 107 Tabel 17. Konfigurasi USB Port untuk komunikasi data 115 Tabel 18. Konfigurasi nilai PWM (Thangkowit, 2006) 116 Tabel 19. Desain duty cycle PWM yang digunakan dalam sistem 116 Tabel 20. Hasil pengujian aktifasi penyemprotan 122 Tabel 21. Dosis penyemprotan tiap kelas serangan gulma 127 Tabel 22. Dosis penyemprotan pada berbagai kecepatan maju peralatan 128 Tabel 23. Waktu kerja rata-rata sistem pengendalian gulma 129 Tabel 24. Waktu kerja rata-rata tiap proses pengendalian gulma lahan terbuka. 150
Tabel 25. Spesifikasi teknis Boom sprayer 159
iv
DAFTAR GAMBAR
Gambar 1. Siklus Pertanian Presisi 7
Gambar 2. Pengumpulan data hasil dengan mesin pemanen 8 Gambar 3. Metode pengambilan contoh tanah dengan metode grid center. 9 Gambar 4. Metode pengambilan contoh tanah dengan metode grid cell 10 Gambar 5. Peningkatan jumlah resistensi gulma pada berbagai kelas herbisida 23
Gambar 6. Mikrokontroler AT89S51 33
Gambar 7. Blok diagram dari mikrokontroler 89S51 34
Gambar 8. Konfigurasi Pin AT89S51 35
Gambar 9. Logika Kontrol Timer/Counter 36
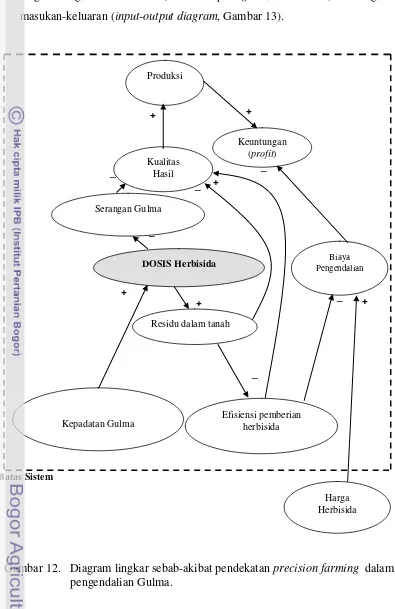
Gambar 10. Ilustrai Duty cycle 30% dalam satu siklus. 38 Gambar 11. Diagram keterkaitan antar penelitian 48 Gambar 12. Diagram lingkar sebab-akibat pendekatan precision farming dalam
pemberantasan Gulma. 49
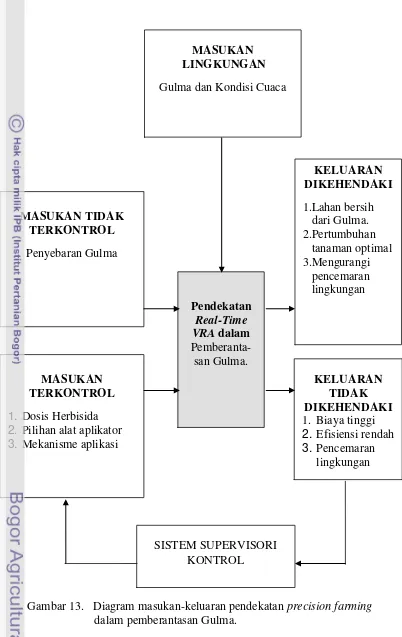
Gambar 13. Diagram masukan-keluaran pendekatan precision farming
dalam pemberantasan Gulma. 50
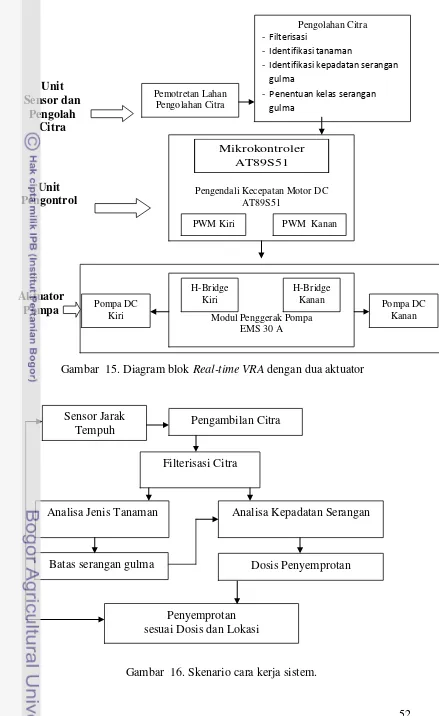
Gambar 14. Set-up peralatan penyemprot berbasis sensor kamera 51 Gambar 15. Diagram blok Real-time VRA dengan dua aktuator 52
Gambar 16. Skenario cara kerja sistem 52
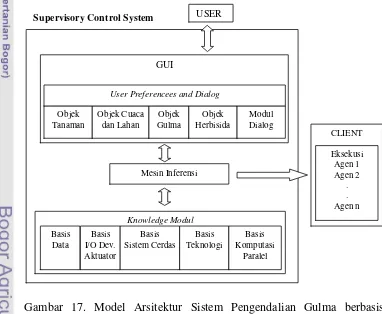
Gambar 17. Model Arsitektur Sistem Pemberantasan Gulma berbasis
Pertanian Presisi. 55
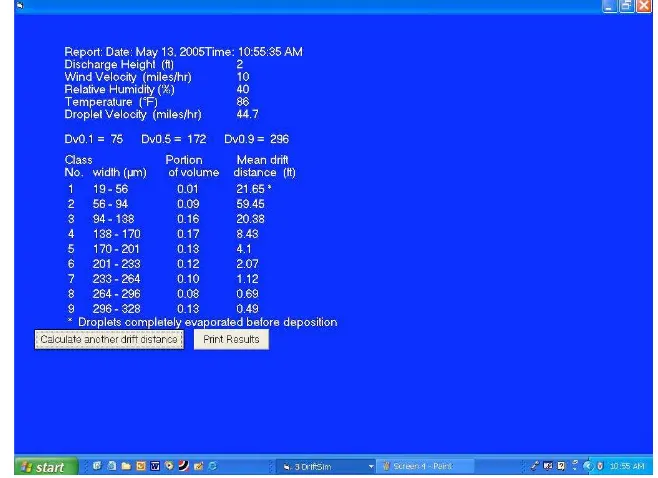
Gambar 18. Tampilan output hasil simulasi DRIFTSIM 60
Gambar 19. Gulma berdaun lebar, Portulaca oleracea 62
Gambar 20. Gulma rumput-rumputan (grasses), Digitaria sanguinalis (rumput
belalang). 62
Gambar 21. Gulma teki-tekian Cyperus byllinga 63
Gambar 22. Bentuk hubungan antar obyek pada sistem supervisori 66 Gambar 23. Bentuk basis data relasional pembentuk basis pengetahuan 66 Gambar 24. Peta aplikasi dengan menggunakan peralatan VRT berketelitian
v
peralatan VRT berketelitian tinggi sesuai posisi dan kondisi lahan. 69 Gambar 26. Contoh peta aplikasi dengan menggunakan peralatan VRT
perlakuan seragam tiap blok 70
Gambar 27. Aplikasi dengan menggunakan peralatan VRT berdasarkan peta
perlakuan seragam tiap blok. 70
Gambar 28. Tampilan menu manajemen data 73
Gambar 29. Tampilan menu input data 74
Gambar 30. Tampilan hasil konsultasi 75
Gambar 31. Tampilan hasil konsultasi dengan saran penggunaan air assist. 75 Gambar 32. Tampilan hasil konsultasi dengan saran tidak melakukan penyemprotan
karena kondisi cuaca yang tidak memungkinkan 76 Gambar 33. Tampilan hasil konsultasi dengan saran penggunaan sistem multi agen
untuk perlakuan penyemprotan beragam. 76
Gambar 34 . Citra serangan gulma pada tanaman kacang tanah. 80 Gambar 35. Citra serangan gulma pada lahan terbuka 80
Gambar 36. Blok diagram pengendalian gulma. 81
Gambar 37. Nilai rataan RGB dan Hue pada satu contoh citra hasil tangkapan. 83
Gambar 38. Hasil proses tresholding dengan pembatas nilai Hue 46.5o 84 Gambar 39. Ilustrasi tahapan perhitungan dimensi fraktal 86
Gambar 40. Tampilan program Analisa Dimensi Fraktal 86 Gambar 41. Perkembangan bentuk tajuk tanaman kacang tanah berbagai umur. 87 Gambar 42. Perkembangan bentuk tajuk tanaman jagung pada berbagai umur. 88 Gambar 43. Nilai dimensi fraktal tanaman kacang tanah pada berbagai umur tanam. 88 Gambar 44. Hubungan umur tanaman kacang tanah dengan rata-rata nilai dimensi
fraktal pada masing-masing umur tanaman. 90 Gambar 45. Nilai dimensi fraktal tanaman jagung dan kacang tanah
pada berbagai umur tanam 91
Gambar 46. Hubungan antara jarak pemotretan dengan lebar dan panjang tangkapan
citra. 95
Gambar 47. Jenis kamera penangkap citra lahan 96
Gambar 48. Pengolahan gambar serangan gulma 96
vi
Gambar 50. Citra hasil tangkapan kamera digital dan filterisasi dengan
pembatas nilai Hue 46.5o 98
Gambar 51. Identifikasi tingkat serangan gulma berdasarkan rataan nilai hijau 99 Gambar 52. Peta tingkat sebaran gulma dengan metode klasifikasi garis lurus
ukuran pengamatan 640 x 480 piksel dan 320 x 240 piksel. 100 Gambar 53. Perbedaan pola klasifikasi pada nilai rata-rata yang sama. 101 Gambar 54. Peta sebaran gulma metode garis lurus dan metode Bayes 104 Gambar 55. Ilustrasi serangan gulma pada tahap pascatanam 105 Gambar 56. Pendeteksian serangan gulma pada tahap pascatumbuh 107 Gambar 57. Konfigurasi sistem penyemprot dengan 3 kamera dan 6 nozzle 108 Gambar 58. Diagram alir mekanisme kerja alat penyemprot berbasis sensor 112 Gambar 59. Desain antarmuka perangkat lunak pengolahan citra dan klasifikasi
serangan gulma 113
Gambar 60. Sensor magnet pencacah jarak tempuh 114 Gambar 61. Hubungan antara tinggi dan lebar penyemprotan 117 Gambar 62. Alat uji distribusi penyemprotan (Patternometer). 118 Gambar 63. Distribusi air hasil penyemprotan dengan bukaan katup 119 Gambar 64. Distribusi air hasil penyemprotan dengan perlakuan PWM 119 Gambar 65. Perbedaan pola nilai penyemprotan tunggal dan pola
penyemprotan ganda dalam satuan liter. 121 Gambar 66. Hasil pengujian ketelitian dosis aplikasi 123 Gambar 67. Pengaruh ketinggian dan jarak pemasangan aplikator cair 124 Gambar 68. Pola distribusi penyemprotan tunggal 125 Gambar 69. Pola distribusi penyemprotan dengan overlap 38%. 125 Gambar 70. Pola distribusi penyemprotan dengan overlap 54%. 126 Gambar 71. Hubungan kecepatan maju peralatan dan debit penyemprotan 128 Gambar 72. Landasan perhitungan kecepatan maju alat penyemprot 129 Gambar 73. Proses desain sistem multi agen pada metodologi Prometheus 132 Gambar 74. Blok diagram sistem multi agen pengendalian gulma pada lahan
terbuka (praolah) 143
Gambar 75. Blok diagram sistem multi agen pengendalian gulma pada lahan
vii
Gambar 76. Diagram sistem multi agen pengendalian gulma berbasis sensor 147
Gambar 77. Proses pipeline 148
Gambar 78. Blok Diagram Hubungan Operasional Antar Agen pada Kasus
Pengendalian Gulma di Lahan Terbuka 149
Gambar 79. Komunikasi antar proses secara paralel 151 Gambar 80. Diagram pipeline dengan 4 prosesor pada kegiatan pengendalian
gulma periode praolah 152
Gambar 81. Grafik hubungan speedup dan jumlah pekerjaan pada kegiatan
pengendalian gulma periode praolah 152
Gambar 82. Diagram pipeline dengan 4 prosesor pada kegiatan pengendalian
gulma periode pascatumbuh 153
Gambar 83. Grafik hubungan speedup dan jumlah pekerjaan pada kegiatan
pengendalian gulma periode praolah 154
Gambar 84. Diagram pipeline dengan 3 prosesor pada kegiatan pengendalian
gulma periode praolah tanpa prosedur penyimpanan citra 154 Gambar 85. Grafik hubungan speedup dan jumlah pekerjaan pada kegiatan
pengendalian gulma praolah tanpa prosedur penyimpanan citra. 155 Gambar 86. Uji coba boom sprayer tipe gendong 160
viii
DAFTAR LAMPIRAN
Lampiran 1. Spesifikasi mikrokontroler AT89S51 (Atmel Datasheet) 173 Lampiran 2. Citra sebaran gulma pada lahan terbuka 178
Lampiran 3. Data pengolahan citra sebaran gulma 179
Lampiran 4. Data penentuan nilai segmentasi 182
Lampiran 5. Data spesifikasi sprayer elektrik 183 Lampiran 6. Data distribusi air hasil penyemprotan dengan pengontrol
Modulasi Lebar Pulsa 184
Lampiran 7. Data distribusi air hasil penyemprotan dengan pengontrol bukaan
katup 185
Lampiran 8. Data pengujian aktifasi penyemprotan 186 Lampiran 9. Data pengujian ketepatan dosis penyemprotan 187 Lampiran 10. Data perhitungan ketelitian metode Bayes 188
Lampiran 11. Pengamatan waktu kerja sistem 191
Lampiran 12. Volume hasil penyemprotan dengan nozzle pipih berwarna (ISO
10.626) berjarak 50 cm 200
Lampiran 13. Nilai konversi volume penyemprotan pada berbagai jarak antar
nozzle 201
Lampiran 14. Data pengamatan pengaruh overlaping penyemprotan 38% 202 Lampiran 15. Data pengamatan pengaruh overlaping penyemprotan 54% 203 Lampiran 16. Perhitungan speed up dan efisiensi sistem komputasi paralel
untuk pekerjaan pengendalian gulma praolah 204 Lampiran 17. Perhitungan speed up dan efisiensi sistem komputasi paralel
untuk pekerjaan pengendalian gulma pascatumbuh 205 Lampiran 18. Perhitungan speed up dan efisiensi sistem komputasi paralel
untuk pekerjaan pengendalian gulma praolah tanpa penyimpanan
1
1. PENDAHULUAN
Latar Belakang
Pertanian presisi merupakan aplikasi informasi dan teknologi pada sistem pengelolaan pertanian untuk mengidentifikasi, menganalisa, dan mengelola informasi keragaman spasial dan temporal di dalam lahan untuk mendapatkan keuntungan optimum, berkelanjutan, dan menjaga lingkungan. Tujuan Pertanian presisi adalah mencocokkan aplikasi sumber daya dan kegiatan budidaya pertanian dengan kondisi tanah dan keperluan tanaman berdasarkan karakteristik spesifik lokasi di dalam lahan (McBratney, 1997). Hal tersebut bertujuan untuk memperoleh hasil yang lebih besar dengan tingkat masukan yang sama (pupuk, kapur, herbisida, insektisida, fungisida, bibit), hasil yang sama dengan pengurangan input, atau hasil lebih besar dengan pengurangan masukan daripada sistem produksi pertanian yang lain.
Pertanian presisi mempunyai banyak tantangan sebagai sistem produksi tanaman sehingga memerlukan banyak teknologi yang harus dikembangkan agar dapat diadopsi oleh petani. Pertanian presisi merupakan revolusi dalam pengelolaan sumber daya alam berbasis teknologi informasi. Selama periode pertengahan tahun 1970 dan awal 1980 dikembangkan pengetahuan tentang tanah dengan survei tanah, penginderaan jarak jauh, dan pemantauan tanaman. Di Amerika serikat, survei tahun 1996 pada pertanian jagung menunjukkan bahwa petani yang menerapkan pertanian presisi mencapai 9% yang sama dengan 20% luas lahan pertanian yang ada.
2 Persaingan antara gulma dengan tanaman utama dalam mengambil unsur-unsur hara dan air dari dalam tanah dan penerimaan cahaya matahari untuk proses fotosintesis menimbulkan kerugian-kerugian dalam produksi baik kualitas maupun kuantitas. Cramer (1975) dalam Lloyd T Evans (1993) menyebutkan kerugian berupa penurunan produksi dari beberapa tanaman dalah sebagai berikut : padi 10.8 %; sorgum 17.8 %; jagung 13 %; tebu 15.7 %; coklat 11.9 %; kedelai 13.5 % dan kacang tanah 11.8 %. Menurut percobaan-percobaan pemberantasan gulma pada padi terdapat penurunan oleh persaingan gulma antara 25-50 %. Gulma menyerap lebih banyak unsur hara daripada tanaman utama. Pada bobot kering yang sama, gulma mengandung kadar nitrogen dua kali lebih banyak daripada jagung; fosfat 1.5 kali lebih banyak; kalium 3.5 kali lebih banyak; kalsium 7.5 kali lebih banyak dan magnesium lebih dari 3 kali. Dapat dikatakan bahwa gulma lebih banyak membutuhkan unsur hara daripada tanaman utama yang dikelola.
Pertanian modern yang konvensional sangat tergantung pada penggunaan bahan kimia untuk peningkatan hasil budidaya. Pengertian konvensional adalah metode aplikasi bahan kimia dengan mengabaikan keragaman yang ada di lahan dan melakukan aplikasi dengan dosis yang seragam di semua tempat. Pertanian presisi adalah salah satu metode pendekatan untuk mengurangi penggunaan bahan kimia yang berlebihan melebihi kebutuhan dosis aplikasi yang seharusnya diberikan. Pemberian bahan kimia sesuai kebutuhan hanya dapat diberikan apabila telah diketahui beberapa informasi yang ada di lahan. Pada kasus pengendalian gulma informasi mengenai jenis gulma dan kepadatan serangan gulma harus diketahui terlebih dahulu baik melalui pengamatan sebelum penyemprotan maupun pengamatan secara langsung pada saat penyemprotan (real time).
3 penginderaan serangan gulma. Akan tetapi saat ini penggunaan machine vision sebagai piranti penginderaan keberadaan gulma telah menjadi penelitian yang aktif dilakukan (Steward B. L. 1999). Komputasi secara real-time harus menghasilkan nilai yang benar di dalam kurun waktu yang ditentukan dimana kebenaran perhitungan tergantung tidak hanya pada kebenaran logis tetapi juga pada waktu di mana hasil diproduksi. Di luar masalah kecepatan komputasi tersebut, masalah utama yang harus diselesaikan adalah kemampuan sistem dalam mengidentifikasi gulma dan tanaman pokok secara spesifik berdasarkan suatu nilai tertentu yang terkandung didalam variabel citra.
Penelitian Real-time VRA (Variable Rate Application) dengan teknologi sederhana telah dilakukan di Thailand dengan memanfaatkan webcam dan pengatur kerja pompa penyemprot untuk pengendalian gulma pada tanaman tebu dengan kecepatan terbesar 1.08 m/s atau setara dengan 3.89 km/jam. Nilai kecepatan maju VRA tersebut masih jauh lebih kecil dibanding dengan kecepatan maju yang mampu dilakukan oleh boom sprayer. Peningkatan kecepatan maju VRA membutuhkan suatu metode tertentu yang mampu mempersingkat waktu kerja sistem mulai dari penangkapan citra sampai pada aktivasi aktuator.
4 jenis peralatan, mengatur, mengkoordinir dan mengintegrasikan unit-unit yang ada dalam sistem.
Tujuan Penelitian
Penelitian ini mempunyai tujuan:
1. Mendesain sistem supervisori untuk menentukan jenis teknologi dan kapasitas aplikator cairan, serta mengontrol aktivitas agen pada praktek pertanian presisi berbasis sistem multi agen.
2. Melakukan identifikasi tanaman pokok dan gulma dan analisa kepadatan serangan gulma dengan menggunakan parameter yang terkandung dalam citra hasil tangkapan camera vision.
3. Mendesain agen-agen cerdas yang dibutuhkan bagi kegiatan pengendalian gulma pada pertanian presisi, dan desain sistem komputasi paralel dengan multi prosesor.
Analisa kebutuhan dilakukan mulai dari kebutuhan paling dasar dari tujuan penelitian yaitu pengendalian gulma pada lahan terbuka dan pada tanaman pokok dengan teknologi pertanian presisi. Kebutuhan tersebut dapat dipenuhi dengan dipenuhinya beberapa sub-kebutuhan yaitu : a) mendeteksi keberadaan gulma di lahan, b) menganalisa keragaman dan kepadatan serangan gulma, c) menganalisa faktor-faktor yang berpengaruh terhadap kegiatan pemberantasan gulma, dan d) menentukan teknologi yang tepat untuk kegiatan pemberantasan gulma.
Ruang Lingkup
5
Manfaat Penelitian
- Memberikan konsultasi dalam pemilihan teknologi pada kegiatan pengendalian gulma tahapan praolah dan tahapan pasca tumbuh.
- Memberikan informasi serangan gulma dari hasil pengamatan secara real time di lahan pertanian baik sebaran maupun tingkat kepadatan serangannya.
- Mengembangkan metode untuk meningkatkan kecepatan proses pengolahan citra sampai aktivasi aktuator pada kegiatan pengendalian gulma berbasis sensor vision camera.
Nilai Kebaruan Penelitian
Nilai kebaruan penelitian ini antara lain terletak pada :
- Penggunaan sistem kontrol supervisori untuk menentukan teknologi dan dosis perlakuan sesuai dengan kondisi cuaca dan kondisi serangan gulma.
- Identifikasi jenis tanaman dengan metode analisa dimensi fraktal bentuk tajuk tanaman.
- Peningkatan ketelitian analisa serangan gulma dengan cara membagi citra hasil tangkapan menjadi empat bagian dan masing-masing dianalisa tingkat keragamannya.
- Desain VRT yang bekerja sesuai dengan lebar kerja hasil analisa keragaman serangan dimana sebuah hasil tangkapan citra lahan tidak diterjemahkan sebagai satu jenis perlakuan melainkan menjadi empat perlakuan yang berbeda. - Penggunaan beberapa agen yang bekerja secara kooperatif dan kolaboratif
untuk menghasilkan kinerja sistem yang diinginkan.
6
2. TINJAUAN PUSTAKA
Pertanian Presisi
Pada kegiatan pertanian konvensional (conventional farming), seluruh bagian lahan mendapatkan perlakuan yang seragam. Laju aplikasi yang konstan tersebut seringkali didasarkan pada pengukuran sifat sampel tanah gabungan yang dikumpulkan untuk merepresentasikan karakteristik rata-rata dari keseluruhan lahan atau pengamatan serangan gulma pada luasan kecil diasumsikan telah mewakili bentuk serangan gulma secara menyeluruh di lahan. Dengan perlakuan demikian, maka kemungkinan yang dapat terjadi adalah adanya aplikasi yang berlebihan (over-application) dan aplikasi yang kurang (under-application). Sedangkan dengan precision farming, dapat dilakukan pengaturan masukan pertanian sesuai kebutuhan spesifik tempat tertentu pada setiap lokasi di dalam lahan. Perbedaan mendasar antara precision farming dan conventional farming yaitu masalah keragaman (variability). Keragaman merupakan gagasan kunci dari precision farming, khususnya penjabaran keragaman di dalam lahan. Keragaman harus dijabarkan paling tidak dalam tiga aspek yaitu spatial variability, temporal variability, dan predictive variability.
7 Menurut Blackmore (1994), tiga aspek dalam precision farming adalah: (1) menemukan apa yang terjadi dalam lahan, (2) memutuskan apa yang dilakukan untuk itu, dan (3) memberi perlakukan pada area tergantung pada keputusan yang dibuat.
Tanaman dan sifat tanah tidak hanya bervariasi terhadap jarak dan kedalaman, tetapi juga terhadap waktu. Beberapa sifat tanah adalah sangat stabil, berubah kecil terhadap waktu, seperti tekstur dan kandungan bahan organik tanah. Sifat-sifat tanah yang lain, seperti kadar nitrat (NO3-) dan kandungan lengas dapat berfluktuasi dengan cepat. Precision farming melakukan pengumpulan sampel tanah dan tanaman untuk mendapatkan informasi tentang bagaimana variasi kondisi di lahan.
Teknologi precision farming dapat digunakan dalam semua aspek siklus produksi tanaman dari operasi pratanam sampai pemanenan. Teknologi tersebut sekarang tersedia, atau akan segera ada, untuk memperbaiki pengujian tanah (soil testing), pengolahan tanah (tillage), penanaman (planting), pemupukan (fertilizing), pemberantasan gulma (spraying), pemanduan tanaman (crop scouting), dan pemanenan (harvesting).
Pelaksanaan precision farming merupakan suatu siklus yang
berkesinambungan dari tahap perencanaan (planning season), tahap pertumbuhan (growing season), dan tahap pemanenan (harvesting season) sebagaimana ditampilkan pada Gambar 1.
8 Tahapan awal dari siklus pertanian presisi adalah analisa kesuburan tanah sedangkan pada sistem yang telah berjalan biasanya melalui proses untuk memonitor hasil panen di tiap lokasi sesuai koordinat pada GPS yang selanjutnya dibuat peta hasil. Penggabungan peta hasil dengan data hasil analisa tanah akan menghasilkan peta aplikasi (Application maps / Prescription maps). Peta aplikasi selanjutnya akan menjadi pemandu bagi VRT (Variable Rate Technology) untuk menentukan posisi mesin di dalam lahan dan menghubungkan posisi tersebut terhadap aplikasi yang harus dilakukan sejak pengolahan lahan, penanaman, pemupukan, proteksi tanaman, sampai pada kegiatan panen.
Beberapa teknologi yang dipakai untuk mengetahui keragaman kondisi lahan antara lain :
a. Yield Monitoring
Pemantauan hasil (yield monitoring) pada pemanenan dilakukan melalui pengukuran produksi tanaman untuk koordinat geografi tertentu (Gambar 2), yang selanjutnya dapat dibuat peta hasil (yield map).
9
b. Soil Testing dan Data Analysis
Pengumpulan sampel tanah secara langsung berdasar grid atau jenis tanah. Bahan sampel tanah dari setiap sel jaringan dikirim ke laboratorium pengujian tanah, selanjutnya diubah menjadi peta digital yang dipakai sebagai landasan bagi aplikasi pemupukan.
Pengambilan sampel berdasarkan grid memiliki dua metode yaitu grid center method dan grid cell method.
b.1. Metode Grid Center
Cara kerja grid center adalah dengan mengambil contoh tanah dalam ruang lingkaran radius 10 sampai dengan 30 feet (1 feet = 0.3048 m), selanjutnya dicampur untuk dianalisa di laboratorium.
Gambar 3. Metode pengambilan contoh tanah dengan metode grid center. (Kuhar, 1997).
b.2. Metode Grid Cell
10 Gambar 4. Metode pengambilan contoh tanah dengan
metode grid cell . (Kuhar, 1997).
c. Remote Sensing
Pengukuran jarak jauh menggunakan data hasil pemantauan jarak jauh. Gambar kondisi lahan dari satelit dan gambar dari photo udara memungkinkan petani untuk melihat kondisi tanaman pada keseluruhan lahan untuk menentukan manajemen perlakuan berdasarkan keragaman kondisi lahan yang terdapat pada citra satelit atau photo udara.
d. Pengukuran Langsung (real time)
Pengukuran langsung pada sensor base precision farming dengan menggunakan peralatan seperti : machine vision, soil doctor , chlorophyill meter, dan lain-lain.
Pada saat ini banyak produsen tanaman menerapkan site specific crop management (SSCM). Pemantauan hasil secara elektronis (electronic yield monitoring) seringkali menjadi tahap pertama dalam mengembangkan SSCM atau program precision farming. Data hasil tanaman yang presisi dapat digabungkan dengan data tanah dan lingkungan untuk memulai pelaksanaan pengembangan sistem pengelolaan tanaman secara presisi (precision crop management system).
11 Precision farming diprediksi pada geo-referencing, yaitu penandaan koordinat geografi untuk titik-titik pada permukaan bumi. Dengan global postioning system (GPS) dimungkinkan menandai koordinat geografi untuk beberapa objek atau titik dalam 5 cm, walaupun keakuratan dari aplikasi pertanian kisaran umumnya adalah 1 sampai 3 meter. GPS adalah sistem navigasi berdasarkan satelit yang dibuat dan dioperasikan oleh Departemen Pertahanan Amerika Serikat. GPS telah terbukti menjadi pilihan dalam postioning system untuk precision farming. Metode untuk meningkatkan keakuratan pengukuran posisi disebut koreksi diferensial atau DGPS (differential global postiong system). Perangkat keras yang diperlukan adalah GPS receiver, differential correction signal receiver, GPS antenna, differential correction antenna, dan computer/monitor interface.
Dalam praktek tradisional, pengujian tanah dan aplikasi pemupukan diarahkan pada ukuran yang relatif besar. Dengan precision farming, lahan dibagi dalam sel-sel jaringan (grid cells), yang mana lokasinya ditentukan dengan GPS. Pada saat ini, ukuran sel-sel jaringan yang paling umum adalah 2,5 dan 3,3 acre (1 acre = 0,4646 ha). Bahan sampel tanah dari setiap sel jaringan dikirim ke laboratorium pengujian tanah, selanjutnya diubah menjadi peta digital (digital map) yang digunakan untuk mengelola aplikasi pupuk (Kuhar, 1997).
Pengambilan sampel tanah dalam precision farming harus mendapat perhatian yang serius agar diperoleh analisa keragaman yang memadai dan pengambilan sampel yang efisien. Oleh karena itu diperlukan informasi spasial, diantaranya adalah stratifikasi geografis dan pengambilan sampel spasial yang sistematis. Metode pengambilan sampel tanah yang umum digunakan adalah pengambilan sampel berdasarkan grid (grid sampling) dan pengambilan sampel berdasarkan jenis tanah (soil type sampling). Pada pengambilan sampel berdasarkan grid, lahan dibagi menjadi sel-sel berbentuk bujur sangkar atau empat persegi panjang berukuran beberapa acre atau lebih kecil.
12 2) informasi yang tepat pada lokasi, dan 3) operasi yang tepat pada waktunya pada tempat yang membutuhkan, yang mana keragaman spasial (spatial variability) sebelumnya sudah dijabarkan, sehingga pengaturan masukan pertanian untuk kebutuhan tempat tertentu pada setiap lokasi di lahan dapat dilakukan. Peralatan (equipment) untuk melakukan variable-rate application disebut Variable-Rate Technology (VRT) (Kuhar, 1997). Metode dasar untuk implementasi VRA adalah:
a. Map-based VRA
Metode ini mengatur laju aplikasi (application rate) bahan berdasarkan informasi dalam peta elektronis dari sifat lahan. Sistem dengan metode ini harus mampu menentukan posisi mesin di dalam lahan dan menghubungkan posisi tersebut terhadap laju aplikasi yang diinginkan dengan membaca peta. Laju aplikasi didefinisikan sebagai volume dari bahan yang diaplikasikan per satuan luas atau berat dari bahan yang diaplikasikan per satuan luas.
Pada kecepatan jalan kendaraan aplikator penglihatan ke depan (looking ahead) pada peta untuk perubahan laju berikutnya menjadi fungsi pengontrol. Prosedur penglihatan ke depan diperlukan untuk menghitung waktu yang diperlukan peralatan untuk mengatur laju aliran bahan sesudah keputusan dibuat untuk merubah laju aplikasi. Komponen utama sistem kontrol otomatis pada map based VRA adalah :
- sensors
- postioning, pressure/flow, ground speed - controllers
- actuators
b. Sensor-based VRA
13 berkesinambungan pada pengontrol sehingga masukan dapat diubah-ubah mencakup luasan-luasan kecil di seluruh lahan.
Komponen utama sistem kontrol otomatis pada sensor-based VRA adalah :
- sensors – soil/plant - pressure flow
- ground speed controllers - actuators
Sampai saat ini, aplikasi VRT telah banyak dikembangkan terutama untuk pupuk dan herbisida, namun demikian operasi-operasi lahan yang lain juga dapat menggunakan VRT, yaitu pengolahan tanah dan penyiapan lahan, penanaman, aplikasi pupuk kandang, pemberantasan hama dan penyakit, sistem air dan irigasi, diagnosa tanaman, dan pemanenan (Kuhar, 1997).
b.1. Pemupukan
Aplikasi VRT pada pemupukan telah banyak dikembangkan, contoh yang tersedia secara komersial untuk sistem dengan kontrol sensor based adalah Soil Doctor sebagai produksi dari Crop Technology, Inc., Houston, TX. Soil Doctor dirancang untuk mengelola pupuk dan bahan kimia pertanian secara otomatis dengan baik. Alat ini menggunakan 2 atau 3 coulter yang berhubungan dengan tanah yang berfungsi sebagai sebuah susunan sensor tunggal. b.2. Pemberantasan hama (pesticide application)
14 b.3. Diagnosa tanaman (crop diagnosis)
Penyakit atau kekurangan hara mempengaruhi pertumbuhan tanaman dan hasil, seringkali ditunjukkan melalui pewarnaan daun yang luar biasa atau tidak teratur, pola kehitaman pada daun-daun tanaman. Sistem mesin visi (machine vision systems) memungkinkan pemantauan penyakit tanaman atau kekurangan hara untuk keperluan perlakuan yang tepat.
Gulma
Gulma adalah tumbuhan penganggu (bukan tumbuhan yang sengaja dibudidayakan) yang tumbuh pada lahan tanaman budidaya atau tumbuhan yang tumbuh disekitar tanaman pokok (tanaman yang sengaja ditanam) atau semua tumbuhan yang tumbuh pada tempat (area) yang tidak diinginkan oleh si penanam sehingga kehadirannya dapat merugikan tanaman lain yang ada di dekat atau disekitar tanaman pokok tersebut. Pendapat para ahli gulma yang lain ada yang mengatakan bahwa gulma disebut juga sebagai tumbuhan pengganggu atau tumbuhan yang belum diketahui manfaatnya, tidak diinginkan dan menimbulkan kerugian (Martin, 2006).
Kehadiran gulma pada lahan pertanian atau pada lahan perkebunan dapat menimbulkan berbagai masalah antara lain :
- Terjadinya kompetisi dengan tanaman pokok (tanaman budidaya) dalam hal penyerapan zat makanan atau unsur-unsur hara di dalam tanah, penangkapan cahaya, penyerapan air dan ruang tempat tumbuh.
- Sebagian besar tumbuhan gulma dapat mengeluarkan zat atau cairan yang bersifat toksin (racun), berupa senyawa kimia yang dapat mengganggu dan menghambat pertumbuhan tanaman lain di sekitarnya. Peristiwa tersebut dikenal dengan istilah allelopati.
- Sebagai tempat hidup atau inang, maupun tempat berlindung hewan-hewan kecil, insekta dan hama sehingga memungkinkan hewan-hewan tersebut dapat berkembang biak dengan baik. Akibatnya hama tersebut akan menyerang dan memakan tanaman pokok ataupun tanaman budidaya.
15 - Dapat menurunkan kualitas produksi dari tanaman budidaya, misalnya dengan
tercampurnya biji-biji dari gulma yang kecil dengan biji tanaman budidaya.
Sifat-sifat Gulma
Gulma merupakan tumbuhan yang mempunyai sifat dan ciri khas tertentu, yang umumnya berbeda dengan tanaman pokok atau tanaman budidaya. Sifat-sifat dari gulma tersebut antara lain:
- Gulma mudah tumbuh pada setiap tempat atau daerah yang berbeda-beda, mulai dari tempat yang miskin nutrisi sampai tempat yang kaya nutrisi.
- Gulma dapat bertahan hidup dan tumbuh pada daerah kering sampai daerah yang lembab.
- Memiliki kemampuan untuk mengadakan regenerasi atau perkembangbiakan
memperbanyak diri besar sekali, khususnya pada gulma perennial. Gulma perennial (gulma yang hidupnya menahun) dapat pula menyebar luas dengan cara perkembangbiakan vegetatif disamping secara generatif.
- Gulma juga dapat menghasilkan biji dalam jumlah yang sangat banyak.
Gulma dapat dibedakan menjadi beberapa golongan atau kelompok berdasarkan bentuk daun, daerah tempat hidup (habitat), daur atau siklus hidup, sifat botani dan morfologi, serta cara perkembangbiakan.
a. Penggolongan berdasarkan bentuk daun
16 umumnya berbentuk lurus-lurus atau linearis yang umumnya didominasi oleh kelompok tumbuhan dari klas Monocotyledoneae.
a.1. Gulma berdaun lebar
Tumbuhan ini mempunyai bentuk daun yang lebar dan luas dan umumnya:
- nervatio (pertulangan daun) menyirip - dari kelompok Dicotyledoneae
- bentuk helaian membulat, bulat, oval, lonjong, segitiga, bentuk ginjal. Contoh:
- Amaranthus spinosus L.
- Ageratum conyzoides (bandotan) - Portulaca oleracea
- Melastoma malabathricum - Eupatorium odoratum - Euphorbia hirta - Centella asiatica.
a.2. Gulma berdaun sempit
Tumbuhan ini mempunyai bentuk daun sempit dan memanjang; - nervatio (pertulangan daun) linearis atau garis-garis memanjang. - dari kelompok monocotyledoneae.
- bentuk daun memanjang seperti pita, jarum, garis dll. contoh:
- Leersea hexandra - Sprobolus poiretii - Cyperus rotundus - Imperata cylindrica
b. Penggolongan gulma berdasarkan habitat
17 b.1. Gulma darat (terristerial weed).
Gulma darat adalah semua tumbuhan gulma yang hidup dan tumbuhnya di darat, seperti: Imperata cylindrical dan Melastoma malabathricum. Gulma darat dapat dibagi berdasarkan lahan atau arealnya, antara lain :
- Gulma sawah tanaman palawija , contoh : Portulaca oleracea dan Cyperus rotundus.
- Gulma ladang, contoh : Leersea hexandra dan Imperata cylindrical.
- Gulma kebun, contoh : Ageratum conyzoides dan
Stachytarpita sp.
- Gulma hutan, contoh : Melastoma malabathricum , Crotalaria sp. - Gulma Padang rumput, contoh : Sprobolus poiretii dan
Andropogon.
b.2. Gulma air
Gulma air adalah tumbuhan gulma yang hidup, tumbuh dan berkembang biaknya di dalam air, di daerah perairan atau ditempat yang basah dan tergenang, Contoh dari gulma ini adalah: Eichornia crassipes, Hydrilla verticilata, Pistia stratiotes, dan Nymphaea sp.
c. Penggolongan berdasarkan daur hidup
Berdasarkan daur hidup (siklus hidup), maka gulma dapat dikelompokkan pada beberapa golongan yaitu.
c.1. Annual (semusim)
Gulma semusim adalah tumbuhan gulma yang mempunyai daur hidup hanya satu musim atau satu tahunan, mulai dari tumbuh, anakan, dewasa dan berkembang biak. Contoh gulma semusim adalah: Ageratum conyzoides, dan Stachytarpita sp.
c.2. Biennial (dua musim)
18 biak selama dua musim tetapi kurang dari dua tahun. Contoh gulma ini adalah: Lactuca canadensis L.
c.3. Perinnial (gulma musiman atau tahunan)
Gulma musiman adalah tumbuhan gulma yang dapat hidup lebih dari dua tahun atau lama berkelanjutan bila kondisi memungkinkan. Contoh gulma ini adalah kebanyakan dari klas monocotyledoneae seperti; Cyperus rotundus dan Imperata cylindrica.
d. Penggolongan berdasarkan sifat morfologi
Berdasarkan sifat morfologi maka gulma dapat dikelompokkan menjadi tiga golongan yaitu:
d.1. Golongan rumput-rumputan (grasses)
Yaitu semua tumbuhan gulma yang berasal dari keluarga Gramineae (Poaceae). Gulma ini ukurannya bervariasi, tumbuh bisa tegak maupun menjalar , hidup semusim atau tahunan. Ciri-ciri kelompok gulma yang tergolong kedalam keluarga rumput ini adalah batangnya umumnya mempunyai ruas-ruas dan buku. Jarak masing-masing ruas (internodus) bisa sama dan bisa pula berbeda dan bahkan ada yang cukup panjang, yang tidak sebanding dengan buku , batangnya ini ada yang menyebut dengan culm. Ciri lain dari kelompok ini adalah daunnya yang tidak mempunyai tangkai daun (ptiolus) tapi hanya mempunya pelepah/ upih (vagina) dan helaian daun (lamina).
Contoh dari gulma ini banyak sekali dan ditemukan pada berbagai tempat, baik di areal tanaman budidaya maupun di daerah yang terbuka, misalnya; Eleusine indica, Imperata cylindrical, Panicum repens, Paspalum conjugatum, Axonopus compressus dan Leersea hexandra.
d.2. Golongan Teki-tekian (sedges)
19 Contoh gulma ini adalah: Cyperus rotundus dan Cyperus irinaria. d.3. Golongan gulma berdaun lebar (broad leaf weed)
Kelompok ini terdiri dari gulma yang berdaun lebar yang umumnya terdiri dari klas Dicotyledoneae, pertulangan daun umunya menyirip, misalnya: Ageratum conyzoides, Eupatorium odoratum, Melastoma malabathricum dan Phylanthus niruri.
e. Penggolongan berdasarkan sifat botani
Berdasarkan sifat-sifat botaninya maka gulma dapat dikelompokkan menjadi beberapa golongan yaitu:
e.1 Golongan gulma Dicotyledoneae (berkeping dua)
Dicotyledoneae adalah semua tumbuhan gulma yang berasal dari klas Dikotiledon, seperti: Crotalaria sp, Melastoma malabathricum, Phyllanthus niruri dan Lantana camara.
e.2. Golongan gulma Monocotyledoneae (berkeping satu)
Monocotyledoneae adalah semua tumbuhan gulma yang berasal dari klas Monokotil seperti: Imperata cylindrical, Panicum repens, Dactyloptenium sp., Eragrostis amabilis, Cynodon dactylon,dan cyperus rotundus.
e.3. Golongan gulma Pteridophyta (pakis-pakisan)
Pteridophyta yaitu semua gulma yang berasal dari kelompok pakis-pakisan, contoh : Neprolepsis bisserata.
f. Penggolongan berdasarkan kesamaan respon terhadap herbisida
Berdasarkan kesamaan respon terhadap herbisida, gulma dibedakan menjadi tiga golongan yaitu gulma rumput-rumputan (grasses), gulma berdaun lebar (broadleave), dan gulma teki (sedges). Gulma rumputan atau disebut sebagai gulma berdaun pita merupakan gulma dari kelompok graminae yang memiliki ciri-ciri tulang daun sejajar tulang daun utama, panjang dan lebar daun jelas berbeda. Contoh gulma golongan rumput
antara lain Cynodon dactylon, Axonopus compressus, Paspalum
20 segitiga. Gulma berdaun lebar sebagian besar merupakan dikotil tetapi ada beberapa golongan monokotil, seperti eceng gondok dan lidah buaya.
Pengendalian Gulma dengan Herbisida
Pemberantasan gulma dapat dilakukan dengan cara memperhatikan beberapa faktor berikut :
- jenis gulma
- kepadatan serangan gulma
- metode pemberantasan yang digunakan (mekanis, biologis atau kimia). Keberhasilan pengendalian gulma merupakan salah satu faktor penentu tercapainya tingkat hasil budidaya tanaman. Gulma dapat dikendalikan melalui berbagai aturan dan karantina; secara biologi dengan menggunakan organisme hidup; secara fisik dengan membakar dan menggenangi, melalui budi daya dengan pergiliran tanaman, peningkatan daya saing dan penggunaan mulsa; secara mekanis dengan mencabut, membabat, menginjak, menyiang dengan tangan, dan mengolah tanah dengan alat mekanis bermesin dan nonmesin, secara kimiawi menggunakan herbisida.
Herbisida memiliki efektivitas yang beragam dalam pemberantasan gulma. Berdasarkan cara kerjanya, herbisida kontak mematikan bagian tumbuhan yang terkena herbisida, dan herbisida sistemik mematikan setelah diserap dan ditranslokasikan ke seluruh bagian gulma. Menurut jenis gulma yang akan ditangani terdapat herbisida selektif yang mematikan gulma tertentu atau spektrum sempit, dan herbisida nonselektif yang mematikan banyak jenis gulma atau spektrum lebar.
21 penggunaannya untuk mengendalikan gulma pada pertanaman jagung adalah paraquat (1,1- dimethyl-4,4 bypiridinium) yang merupakan herbisida kontak nonselektif (Fadhly, 2005).
Populasi gulma mudah berubah karena perubahan tanaman yang diusahakan dan herbisida yang digunakan dari satu musim ke musim lainnya. Perubahan jenis gulma dapat berimplikasi pada perlunya perubahan herbisida yang digunakan untuk pengendalian. Pertimbangan utama pemilihan herbisida adalah kandungan bahan aktif untuk membunuh gulma yang tumbuh di areal pertanaman. Jenis bahan aktif dan takaran herbisida untuk mengendalikan gulma disajikan dalam Tabel 1. Sedangkan Tabel 2 menunjukkan selektivitas daya bunuh herbisida pada tanaman pokok jagung. Takaran herbisida meningkat jika kondisi penggunaannya kurang mendukung, misalnya hujan turun setelah aplikasi atau daun gulma berlapis lilin.
Dalam hal ini perlu digunakan perekat/perata (surfactant) dengan takaran 0,1-0,5% volume/volume (Tasistro 1991 dalam Fadhly 2005). Tabel 3 dan 4 menunjukkan jenis gulma yang dapat dikendalikan oleh herbisida tertentu dan waktu penggunaannya. Glifosat efektif mengendalikan gulma rumputan, dan pencampuran glifosat dengan 2,4-D atau dengan dikamba diperlukan agar gulma berdaun lebar juga dapat dikendalikan. Kehadiran gulma tertentu pada pertanaman jagung mengharuskan pencampuran herbisida tertentu, misalnya 2,4-D + dikamba atau 2,4-D + paraquat.
Tabel 1. Jenis dan takaran herbisida untuk pengendalian gulma.
Herbisida Tunggal Campuran dalam tangki
Bahan aktif Dosis (kg ba/ha) Bahan aktif Dosis (kg ba/ha) 2.4-D amin 0.70 – 1.20 2.4-D amin + Glifosat (0.7-1.2)+(0.36-0.63) 2.4-D ester 0.40 – 0.80 2.4-D ester + Glifosat (0.4-0.8)+(0.36-0.63) Glifosat 0.54 – 0.90 Dikamba + Glifosat (0.24-0.36)+(0.36-0.63) Parakuat 0.20 – 0.40 2.4-D amin + Dikamba (0.7-1.2)+(0.24-0.36) Dikamba 0.24 – 0.36
22 Tabel 2. Selektifitas beberapa herbisida penting
Bahan aktif herbisida
Gulma yang terkendali Gulma yang tidak terkendali
2.4-D Banyak gulma daun lebar setahun.Takaran tinggi
Dikamba Gulma daun lebar setahun Kebanyakan gulma tahunan
Pendimetalin Gulma daun lebar setahun Kebanyakan gulma tahunan
Metolaktor Gulma daun lebar dan rumput-rumputan
Kebanyakan gulma tahunan dan banyak gulma tahunan
Sumber : Lafitte (1994) dalam dalam Fadhly 2005.
Tabel 3. Pedoman pemilihan herbisida berdasarkan komposisi gulma dominan.
23 Tabel 4. Herbisida yang dianjurkan untuk pengendalian gulma pada tanaman
pokok jagung.
Penggunaan Bahan aktif herbisida Gulma yang terkendali
Sebelum berkecambah Sumber : Violic (2000) dalam Fadhly (2005).
Pengendalian gulma secara kimiawi berpotensi merusak lingkungan sehingga perlu dibatasi melalui pemaduan dengan cara pengendalian lainnya. Kesalahan dalam menentukan dosis (dosis berlebih) pada pemberantasan gulma dengan cara kimia akan mengakibatkan turunan gulma memiliki sifat ketahanan terhadap jenis herbisida tertentu, disamping efek samping yang tidak baik pada lingkungan akibat residu yang ditinggalkan pada tanah. Gambar 5 menunjukkan peningkatan jumlah resistensi gulma pada berbagai kelas herbisida (sumber : Heap, I. M. 2007).
24
Sistem Multi Agen
Menurut Nwana (Nwana, 1996. dalam Romi, 2003), konsep agen sudah dikenal lama dalam bidang AI (Artificial Intelligence), tepatnya dikenalkan oleh seorang peneliti bernama Carl Hewitt (Hewitt, 1977. dalam Romi, 2003) dengan concurrent actor modelnya pada tahun 1977. Dalam modelnya Hewitt mengemukakan teori tentang suatu obyek yang yang disebut actor, yang mempunyai karakteristik menguasai dirinya sendiri, interaktif, dan bisa merespon pesan yang datang dari lain obyek sejenis. Dari berbagai penelitian berhubungan dengan hal diatas, kemudian lahirlah cabang ilmu besar yang merupakan turunan dari AI yaitu Distributed Artificial Intelligence (DAI), yang antara lain membawahi bidang penelitian, Distributed Problem Solving (DPS), Parallel Artificial Intelligence (PAI), dan Multi Agent System (MAS).
Di dalam kamus Webster’s New World Dictionary (Guralnik, 1983. dalam Romi, 2003), agen didefinisikan sebagai: A person or thing that acts or is capable of acting or is empowered to act, for another. Caglayan mendefinisikan agen sebagai: Suatu entitas software komputer yang memungkinkan user (pengguna) untuk mendelegasikan tugas kepadanya secara mandiri (autonomously). Kemudian beberapa peneliti lain menambahkan satu point lagi, yaitu bahwa agen harus bisa berjalan dalam kerangka lingkungan jaringan (network environment) (Brenner et. al., 1998. dalam Romi, 2003). Definisi agen dari para peneliti lain pada hakekatnya adalah senada, meskipun ada yang menambahkan atribut dan karakteristik agen ke dalam definisinya. Secara lengkap definisi agen dan komparasinya, dirangkumkan oleh Franklin dalam makalahnya (Franklin et. al., 1996. dalam Romi, 2003).
1. Interaksi Antar Agen dalam Sistem Multi Agen.
Ada 4 jenis interaksi antar agent dalam kerangka MAS, yaitu:
25 - Coordination : Menampakkan tujuan dan knowledge yang dimiliki ke agen lain. Pada interaksi coordination, dua agen tersebut memiliki tujuan yang berbeda.
- Loose Competition: Menampakkan tujuan dan menyembunyikan knowledge yang dimiliki ke agen lain.
- Strict Competition : Tidak menampakkan tujuan maupun knowledge yang dimiliki ke agen lain.
2. Karakteristik dan Atribut Agen
a. Autonomy
Agen dapat melakukan tugas secara mandiri dan tidak dipengaruhi secara langsung oleh user, agen lain ataupun oleh lingkungan (environment). Untuk mencapai tujuan dalam melakukan tugasnya secara mandiri, agen harus memiliki kemampuan kontrol terhadap setiap aksi yang mereka perbuat, baik aksi keluar maupun kedalam (Woolridge et. al., 1995. dalam Romi, 2003.). Dan satu hal penting lagi yang mendukung autonomy adalah masalah intelegensi (intelligence) dari agen.
b. Intelligence, Reasoning, dan Learning
Setiap agen harus mempunyai standar minimum untuk bisa disebut agen, yaitu intelegensi (intelligence). Dalam konsep intelligence, ada tiga komponen yang harus dimiliki: internal knowledge base, kemampuan reasoning berdasar pada knowledge base yang dimiliki, dan kemampuan learning untuk beradaptasi dalam perubahan lingkungan.
c. Mobility
Khusus untuk mobile agen, dia harus memiliki kemampuan yang merupakan karakteristik tertinggi yang dia miliki yaitu mobilitas. Berkebalikan dari hal tersebut adalah stationary agent. Bagaimanapun juga keduanya tetap harus memiliki kemampuan untuk mengirim pesan dan berkomunikasi dengan agen lain.
d. Delegation
26 diperintahkan oleh user. Fenomena pendelegasian (delegation) ini adalah karakteristik utama suatu program disebut agen.
e. Reactivity
Karakteristik agen yang lain adalah kemampuan untuk bisa cepat beradaptasi dengan adanya perubahan informasi yang ada dalam suatu lingkungan (enviornment). Lingkungan itu bisa mencakup: agen lain, user, adanya informasi dari luar, dan sebagainya.
f. Proactivity dan Goal-Oriented
Sifat proactivity boleh dikata adalah kelanjutan dari sifat reactivity. Agen tidak hanya dituntut bisa beradaptasi terhadap perubahan lingkungan, tetapi juga harus mengambil inisiatif langkah penyelesaian apa yang harus diambil. Untuk itu agen harus didesain memiliki tujuan (goal) yang jelas, dan selalu berorientasi kepada tujuan yang diembannya (goal-oriented).
g. Communication and Coordination Capability
Agen harus memiliki kemampuan berkomunikasi dengan user dan juga agen lain. Masalah komunikasi dengan user adalah masuk ke masalah user interface dan perangkatnya, sedangkan masalah komunikasi, koordinasi, dan kolaborasi dengan agent lain adalah masalah sentral penelitian multi agent system (MAS).
3. Klasifikasi Agen
Teknik klasifikasi agen menurut karakteristik dipelopori oleh Nwana (Nwana, 1996. dalam Romi, 2003.). Menurut Nwana, agen bisa diklasifikasikan menjadi tujuh berdasarkan pada karakteristiknya, yaitu a. Collaborative Agent
Agent yang memiliki kemampuan melakukan kolaborasi dan koordinasi dengan agen lain dalam kerangka Multi Agent System (MAS). b. Interface Agent
27 c. Mobile Agent
Agen yang memiliki kemampuan untuk bergerak dari suatu tempat ke tempat lain, dan secara mandiri melakukan tugas ditempat barunya tersebut, dalam lingkungan jaringan komputer.
d. Information dan Internet Agent
Agen yang memiliki kemampuan untuk menjelajah internet untuk melakukan pencarian, pemfilteran, dan penyajian informasi untuk user, secara mandiri. Atau dengan kata lain, mengelola informasi yang ada di dalam jaringan internet.
e. Reactive Agent
Agen yang memiliki kemampuan untuk bisa cepat beradaptasi dengan lingkungan baru dimana dia berada.
f. Hybrid Agent
Agen yang memiliki katakteristik yang merupakan gabungan dari karakteristik yang sudah disebutkan sebelumnya adalah masuk ke dalam agen hybrid.
g. Heterogeneous Agent System
Dalam lingkungan Multi Agent System (MAS), apabila terdapat dua atau lebih agen hybrid yang memiliki perbedaan kemampuan dan karakteristik, maka sistem MAS tersebut kita sebut dengan heterogeneous agent system.
Penentuan agen-agen yang dapat berjalan simultan tidak terlepas dari definisi agen berdasarkan kapabilitasnya, yaitu Basic Agent, Passive Agent, Active Agent dan Peer Agent.
Tabel 5. Kapabilitas agen
Capabilities Basic
Receives assertions √ √ √ √
Receives queris √ √
Sends assertions √ √ √
Sends queries √ √
28 Beberapa software yang biasa digunakan dalam pembuatan sistem multi agen diantaranya INGENIAS development kit (IDK), Promotheus development tools, Forel Intelligent Agent Technology (FIAT), Open Cybele dan Java Agen Development (JADE).
INGENIAS Development Kit (IDK) adalah kerangka kerja untuk keperluan analisis desain dan implementasi sistem multi agen. Metode Prometheus adalah metode untuk membangun sistem perangkat lunak berbasis agen yang menentukan spesifikasi proses detail, desain, implementasi dan uji kinerja . Forel Intelligent Agent adalah sebuah set perangkat lunak terintegrasi yang memiliki kemampuan untuk mengubah permasalahan kompleks menjadi perintah pengendalian sederhana, dimana transformasi dilakukan dengan pembelajaran mandiri dan menghasilkan aturan-aturan optimal dan set fitur peta untuk pengambilan keputusan. OpenCybele menggunakan pendekatan yang berbeda terhadap agen. Agen didefinisikan sebagai sekelompok kegiatan yang berbagi data, thread, dan struktur eksekusi secara simultan.
Pemrosesan Paralel
Pemrosesan paralel adalah penggunaan mesin komputer paralel untuk memecahkan satu unit problem komputasi dengan tujuan untuk mempersingkat waktu pengolahan. Proses paralelisasi dilakukan dengan cara membagi data ke beberapa memori terdistribusi dimana bagian-bagian citra akan difilterisasi secara paralel Tiap-tiap prosesor melakukan komputasi sesuai dengan tugas yang telah ditentukan. Berdasarkan jumlah aliran instruksi dan aliran datanya, Michael J. Flynn pada tahun 1966 mengelompokkan komputer digital menjadi empat golongan besar (Hwa, 1985 dalam Purbasari, 2002).
29
1. Komputer SISD (Single Instruction stream-Single Data stream)
Pada komputer jenis ini semua instruksi dikerjakan secara berurutan satu demi satu, tetapi juga dimungkinkan adanya overlapping dalam eksekusi setiap bagian instruksi (pipelining). Pada umumnya komputer SISD berupa komputer yang terdiri atas satu buah pemroses (single processor). Namun komputer SISD juga mungkin memiliki lebih dari satu unit fungsional (modul memori, unit pemroses, dan lain-lain), selama seluruh unit fungsional tersebut berada dalam kendali sebuah unit pengendali.
2. Komputer SIMD (Single Instruction stream-Multiple Data stream)
Pada komputer SIMD terdapat lebih dari satu elemen pemrosesan yang dikendalikan oleh sebuah unit pengendali yang sama. Seluruh elemen pemrosesan menerima dan menjalankan instruksi yang sama yang dikirimkan unit pengendali, namun melakukan operasi terhadap himpunan data yang berbeda yang berasal dari aliran data yang berbeda pula.
3. Komputer MISD (Multiple Instruction stream-Single Data stream)
Komputer jenis ini memiliki sejumlah unit pemroses yang masing-masing menerima dan mengoperasikan instruksi yang berbeda terhadap aliran data yang sama, karena setiap unit pemroses memiliki unit pengendali yang berbeda. Keluaran dari satu pemroses menjadi masukan bagi pemroses berikutnya. Belum ada perwujudan nyata dari komputer jenis ini kecuali dalam bentuk prototipe untuk penelitian.
4. Komputer MIMD (Multiple Instruction stream-Multiple Data stream)
Pada sistem komputer MIMD murni terdapat interaksi di antara beberapa pemroses. Hal ini disebabkan seluruh aliran dari dan ke memori berasal dari space data yang sama bagi semua pemroses. Komputer MIMD bersifat tightly coupled jika tingkat interaksi antara pemroses tinggi, dan disebut loosely coupled jika tingkat interaksi antara pemroses rendah.
30 paralel. Waktu eksekusi sekuensial didefinisikan sebagai waktu running algoritma yang sama yang dieksekusi oleh satu prosesor. Speed up dari suatu program paralel adalah waktu eksekusi sekuensial dibagi dengan waktu eksekusi paralel. Speed up dapat didefinisikan sebagai berikut :
( 1 )
keterangan : S(n) = speed up,
T(1) = waktu eksekusi operasi pada sistem satu prosesor, T(n) = waktu eksekusi pada sistem n prosesor.
Nilai efisiensi sistem dengan n prosesor didefinisikan sebagai berikut :
( 2 )
keterangan : E(n) = efisiensi S(n) = speed up
T(1) = waktu eksekusi operasi pada sistem satu prosesor T(n) = waktu eksekusi pada sistem n prosesor
n = jumlah prosesor
31
( 3 )
keterangan :
f = fraksi sekuensial 1-f = fraksi paralel p = jumlah prosesor
Analisa Dimensi Fraktal
Dimensi benda yang umum dalam kehidupan sehari-hari merupakan dimensi dalam ruang Euclid [1], yaitu 0, 1, 2, dan 3. Dimensi dapat dibayangkan sebagai sebuah ukuran jumlah titik-titik yang sedang ditinjau. Konsep ini secara matematis mungkin tampak ganjil. Akan tetapi, meski garis paling tipis sekalipun memiliki tak hingga banyaknya titik, suatu permukaan atau suatu bidang tentu lebih besar dari sebuah garis atau kurva, seperti halnya suatu ruang lebih besar dari sebuah permukaan. Inilah alasan utama pemberian label dimensi 0 untuk titik, 1 untuk garis, 2 untuk bidang, dan 3 untuk ruang.
Pola disebut fraktal jika mereka terlihat sama pada skala yang berbeda (Critten, 1996). Bentuk fraktal secara umum dapat dihubungkan ke karakteristik indicial yang dikenal sebagai dimensi fraktal. Analisa dimensi Fraktal dilakukan dengan cara melakukan fragmentasi terhadap citra yang telah difilterisasi kedalam bentuk persegi panjang berukuran s. Selanjutnya dihitung jumlah bujursangkar
N(s) yang berisi warna putih (hasil filterisasi tanaman). Perhitungan ini diulangi dengan berbagi nilai s. Langkah berikutnya adalah memplot nilai log N(s) terhadap nilai log (1/s) dan menentukan bentuk persamaan regresi linier : y=ax+b. Dimensi Fraktal adalah nilai a pada persamaan regresi linier tersebut.
Metode Klasifikasi Non Parametrik Bayes