PERANCANGANARGOMETER DIGITAL MENGGUNAKAN
SENSOR OPTOCOUPLER BERBASIS ATMEGA 8535
PROJEK AKHIR II
MUHD. NORMANSYAH KABAN
112411030
PROGRAM STUDI DIPLOMA III METROLOGI
DANINSTRUMENTASIDEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERANCANGANARGOMETER DIGITAL MENGGUNAKAN
SENSOR OPTOCOUPLER BERBASIS ATMEGA 8535
PROJEK AKHIR II
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh
Ahli Madya
PROGRAM STUDI DIPLOMA III METROLOGI DAN
INSTRUMENTASIDEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Yang bertanda tangan di bawah ini, Dosen Pembimbing Projek Akhir II menyatakan bahwa laporan Projek Akhir II dari:
MUHD. NORMANSYAH KABAN NIM: 112411030
Dengan judul:
PERANCANGANARGOMETER DIGITAL MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS ATMEGA 8535
Telah selesai diperiksa dan dinyatakan selesai, serta dapat diajukan dalam sidang pertanggungjawaban laporan ProjekAkhir II.
Diluluskan di Medan, 21 Juli 2014
Ketua Derpartemen Dosen Pembimbing I
D3 Metrologi dan Instrumentasi Projek Akhir II
Dr. Diana Alemin Barus M.Sc_
PERNYATAAN
PERANCANGANARGOMETER DIGITAL MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS ATMEGA 8535
PROJEK AKHIR II
Saya mengakui bahwa Projek Akhir II ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 21 Juli 2014
PENGHARGAAN
Alhamdulillahirabbil’alamin,
Segala puji dan syukur bagi Allah Subhanahuwata’ala yang telah melimpahkan barokah, rahmat, hidayah-Nya dan menganugerahkan kemudahan serta kelancaran sehingga penulis dapat menyelesaikan penulisan tugas proyek ini sesuaiwaktu yang telah ditetapkan. Shalawat dan salam semoga senantiasa tercurahkan kepada Rasulullah Sallallahu’alaihiwassalam sang pembawa petunjuk dan selalu menjadi inspirasi dan teladan bagi penulis
Projek Akhir II ini disusun untuk melengkapi persyaratan dalam mencapai gelar Ahli Madya pada Program Studi Diploma Tiga (III) Metrologi dan Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Adapun judul Projek Akhir IIini adalah
PERANCANGAN ARGOMETER DIGITAL MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS ATMEGA 8535
Penulis menyadari bahwa tersusunnya Projek Akhir II ini dari Do’a, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Kedua orang tua penulis dan serta saudara kandung yang telah memberikan bantuan moril maupun materil, semangat dan do’a yang begitu besar kepada penulis.
3. IbuDra. Ratna Askiah S, M.Si, selaku Sekretaris Program Studi D-III Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam.
4. Bapak Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam
5. Bapak Drs. Takdir Tamba, M.Eng.Sc, selaku dosen pembimbing, yang telah banyak membantu dan mendukung penulis dalam menyelesaikan Projek Akhir II ini.
6. Seluruh Dosen dan Karyawan Program Studi Diploma Tiga (III) Metrologi dan Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
7. Abangda Oki Handinata yang telah membantu penulis untuk menyelesaikan Projek Akhir II ini, dan sudah meluangkan waktunya untuk memberi masukan-masukan untuk Projek Akhir II ini.
8. Teman-teman D-III Metrologi dan Instrumentasi yang selama ini sudah memberikan kenangan-kenangan yang mungkin tidak akan terlupakan selama masa perkuliahan.
Penulis menyadari sepenuhnya bahwa dalam pembuatan Projek Akhir II ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifatnya membangun dalam penyempurnaan Projek Akhir II ini.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, 21 Juli 2014 Hormat Kami,
ABSTRAK
Seiring dengan kemajuan teknologi sekarang ini banyak peralatan elektronik yang sudah dikontrol secara otomatis. Penggunaan sistem Instrumentasi yang dikontrol secara digital ini banyak juga digunakan baik untuk keperluan industri maupun komersial. Dalam penggunaan dan pemanfaatan sistem Instrumentasi ini pekerjaan manusia akan terselesaikan dengan waktu yang cepat, tepat dan akurat. Oleh karena itu manusia diharapkan mampu mengembangkan dan menggali sumber-sumber ilmu yang dapat meningkatkan kinerja perangkat Instrumentasi yang bisa membantu pekerjaan manusia itu sendiri.
DAFTAR ISI
DAFTAR GAMBAR ... viii
BAB I PENDAHULUAN ... 1
1.1.LATAR BELAKANG ... 1
1.2.RUMUSAN MASALAH ... 1
1.3.TUJUAN PENULISAN ... 1
1.4.BATASAN MASALAH ... 2
1.5.SISTEMATIK PENULISAN ... 2
BAB II LANDASAN TEORI ... 4
2.1. Sensor Optocoupler ... 4
2.2. Mikrokontroler ATMega 8535 ... 6
2.2.1. Konfigurasi Pin ATMega8535... 9
2.2.2. Peta Memori ATMega8535 ... 11
2.2.3. Status Register (SREG) ... 13
2.3. Liquis Crystal Display (LCD) ... 14
2.4. Motor ... 15
2.4.1. Motor DC ... 15
2.4.2. Prinsip Kerja Motor ... 17
2.4.3. Karakteristik Motor DC ... 20
2.5. Bahasa Pemograman Mikrokontroler ... 21
2.5.1. CodeVisionAVR ... 21
BAB III
PERANCANGAN ALAT DAN PEMBUATAN PROGRAM ... 24
3.1. Perancangan Blok Diagram Sistem ... 24
3.2. Fungsi Tiap Blok ... 24
3.3. Rangkaian Mikrokontroler ATMega8535 ... 25
3.4. Rangkaian Power Supply ... 26
3.5. Pengaplikasian LCD ... 27
3.6. Diagram Alir Program ... 28
BAB IV PENGUJIAN ALAT DAN ANALISA PROGRAM ... 29
4.1. Pengujian Rangkaian Mikrokontroler ATMega8535 ... 29
4.2. Pengujian Rangkaian Power Supply ... 30
4.3. Pengujian Liquid Crystal Display (LCD) ... 30
4.4. Pengujian Rangkaian Keseluruhan ... 30
4.5. Analisa Program ... 31
BAB V KESIMPULAN DAN SARAN ... 37
5.1. Kesimpulan ... 37
5.2. Saran ... 37
DAFTAR PUSTAKA ... 38
DAFTAR GAMBAR
Gambar Halaman
Gambar 2.1. Blok diagram atmega8535 ... 8
Gambar 2.2. Konfigurasi pin atmega8535 ... 9
Gambar 2.3. Peta memori program ... 11
Gambar 2.4. Peta memori data ... 12
Gambar 2.5. EEPROM data memori ... 12
Gambar 2.6. Status register atmega8535 ... 13
Gambar 2.7. Lcd karakter 16x2 ... 14
Gambar 2.8. Struktur motor dc sederhana ... 16
Gambar 2.9. Motor dc ... 16
Gambar 2.10. Medan magnet yang membawa arus mengelilingi konduktor .... 17
Gambar 2.11. Medan magnet mengelilingi konduktor diantara dua kutub ... 17
Gambar 2.12. Reaksi garis fluks ... 18
Gambar 2.13. Prinsip kerja motor dc ... 19
Gambar 2.14. Kurva torsi vs kecepatan motor dc ... 20
Gambar 2.15. ISP-flash programmer ... 23
Gambar 3.1. Blok diagram sistem ... 24
Gambar 3.2. Rangkaian sistem minimum mikrokontroler atmega8535 ... 25
Gambar 3.4. Rangkaian skematik konektor yang dihubungkan dari lcd ... 26
Gambar 3.5. Rangkaian skematik konektor yang dihubungkan dari lcd ke mikrokontroler ... 27
ABSTRAK
Seiring dengan kemajuan teknologi sekarang ini banyak peralatan elektronik yang sudah dikontrol secara otomatis. Penggunaan sistem Instrumentasi yang dikontrol secara digital ini banyak juga digunakan baik untuk keperluan industri maupun komersial. Dalam penggunaan dan pemanfaatan sistem Instrumentasi ini pekerjaan manusia akan terselesaikan dengan waktu yang cepat, tepat dan akurat. Oleh karena itu manusia diharapkan mampu mengembangkan dan menggali sumber-sumber ilmu yang dapat meningkatkan kinerja perangkat Instrumentasi yang bisa membantu pekerjaan manusia itu sendiri.
BAB I PENDAHULUAN
1.1.Latar belakang
Adanya perkembangan dan kemajuan teknologi yang demikian pesat saat ini, maka telah banyak diciptakannya alat bantu untuk mempermudah dan mempercepat pekerjaan manusia. Alatbantu ini menggunakan system instrumentasi yang banyak di gunakan pada angkutan umum saat ini seperti taksi.
Sering kita jumpai banyaknya saat ini angkutan umum (taksi) yang masih menggunakan tarif angkutan yang terkadang merepotkan dan merugikan salah satu pihak pengguna / pemilik karena masih menggunakan tarif tawar menawar. Hal ini tentunya tidak di inginkan dan akan menimbulkan tarif yang berbeda-beda setiap saat melakukan perjalanan dengan jarak, waktu dan tujuan yang sama. Masalah ini dapat di atasi dengan membuat alat argometer ini sehingga tidak perlu memakan waktu yang banyak untuk tawar menawar antara kedua pihak karena akan dengan sendirinya menghitung jarak dan biaya yang kita tempuh setelah alat dihidupkan dan nilainya akan ditampil melalui LCD. Disini penulis memilih alat ukur argometer berbasis mikrokontroler sebagai alat yang di kembangkan dengan fitur ADC dan untuk mempermudah dalam perhitungan / pengukuran tarif dan jarak yang ditentukan lebih cepat, tepat dan akurat.
1.2.Rumusan Masalah
Laporan projek ini membahas tentang perancangan yang terdiri dariMikrokontroler ATMega 8535 sebagai pusat kendalinya beserta software pemrogramannnya, Optocoupler sebagai sensor, LCD sebagai tampilannya, PSA, Baterai, dan IC 7805.
1.3.Tujuan Penulisan
Penulisan laporan projek ini adalah untuk:
2. Pengembangankreatifitas mahasiswa dalam bidangilmuinstrumentasi pengontrolan dan elektronika sebagai bidang diketahui.
3. Merancang suatu alat pengukuran argometeruntuk kemudian ditampilkan pada LCD dengan menggunakan sensor Optocoupler berbasis ATMega 8535.
4. Mengetahui cara kerja ADC berbasis Mikrokontroler ATMega 8535.
5. Penulisinginmemberikan penjelasantentang penggunaan dancara kerja Alat Ukur Argometer Menggunakan ADC BerbasisMikrokontroler ATMega 8535.
1.4.Batasan Masalah
Mengacu pada hal diatas Penulis merancang Alat Ukur Argometer menggunakan ADC Berbasis Mikrokontroler ATMega 8535, dengan batasan-batasan sebagaiberikut :
1. Pembahasan mikrokontroler Atmega 8535.
2. Pembahasan hanya meliputi rangkaian Mikrokontroler ATMega 8535, ADC, beserta programnya.
3. Pembahasan hanya sebatas pemrograman mikrokontroler dan interfacinguntuk pemrograman dari komputer ke mikrokontroler tidak dibahas.
4. Pengujian alat tidak dilakukan pada kondisi yang ekstrim (misalnya : sepedamotor, mobil , dll).
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, penulis membuat sistematika penulisan bagaimana sebenarnya prinsip kerja dari pengukuran Argometer menggunakan sensor optocoupler berbasis mikrokontroler ATMega 8535, maka penulis menulis tugas akhir ini dengan urutan sebagai berikut :
BAB I : PENDAHULUAN
BAB II : LANDASAN TEORI
Dalam babini dijelaskan tentang teori pendukung yangdigunakan untuk pembahasan dan cara kerja dari rangkaian teoripendukungitu antaralaintentangArgometer berbasis mikrokontroler dan bahasa program yang dipergunakan, serta cara kerja dari mikrokontroler Atmega 8535 dan komponen pendukung.
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV : PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat.dll
BAB V : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem.Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya.Pengetahuan yang mendukung perencanaan dan realisasi alat meliputisensor optocoupler, mikrokontroler ATMega 8535, IC 7805, LCD dan program.
2.1.Sensor Optocoupler
Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter danreceiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya terpisah.Biasanya optocoupler digunakan sebagai saklar elektrik, yang bekerja secara otomatis.Pada dasarnya Optocoupler adalah suatu komponen penghubung (coupling) yang bekerja berdasarkan picu cahaya optic. Optocoupler terdiri dari dua bagian yaitu:
1. Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED inframerah tidak terlihat oleh mata telanjang.
mempunyai daerah frekuensi 1 x 1012 Hz sampai dengan 1 x 1014 GHz atau daerah frekuensi dengan panjang gelombang 1µ m – 1mm.
LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi bias maju, LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer.
Proses terjadinya pancaran cahaya pada LED infra merah dalam optocoupler adalah sebagai berikut. Saat dioda menghantarkan arus, elektron lepas dari ikatannya karena memerlukan tenaga dari catu daya listrik. Setelah elektron lepas, banyak elektron yang bergabung dengan lubang yang ada di sekitarnya (memasuki lubang lain yang kosong). Pada saat masuk lubang yang lain, elektron melepaskan tenaga yang akan diradiasikan dalam bentuk cahaya, sehingga dioda akan menyala atau memancarkan cahaya pada saat dilewati arus. Cahaya infra merah yang terdapat pada optocoupler tidak perlu lensa untuk memfokuskan cahaya karena dalam satu chip mempunyai jarak yang dekat dengan penerimanya. Pada optocoupler yang bertugas sebagai penerima cahaya infra merah adalah fototransistor. Fototransistor merupakan komponen elektronika yang berfungsi sebagai detektor cahaya infra merah. Detektor cahaya ini mengubah efek cahaya menjadi sinyal listrik, oleh sebab itu fototransistor termasuk dalam golongan detektor optik.
Fototransistor memiliki sambungan kolektor–basis yang besar dengan cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan diberi bias maju, cahaya yang masuk akan menimbulkan arus pada kolektor.
2.2.Mikrokontroler ATMega8535
Mikrokontroler, sesuai namanya adalah suatualat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil.Sebelum ada mikrokontroler, telah ada terlebih dahulu muncul mikroprosesor.Bila dibandingkan dengan mikroprosesor, mikrokontroler jauh lebih unggul karena terdapat berbagai alasan, diantaranya :
1. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia sementara pada mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut.IC I/O yang dimaksud adalah PPI 8255.
2. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga mutlak harus ada.Mikroprosesor belum memiliki memori internal sehingga memerlukan IC memori eksternal.Dengan kelebihan-kelebihan di atas, ditambah dengan harganya yang relatif murah sehingga banyak penggemar elektronika yang kemudian beralih kemikrokontroler.Namun demikian, meski memiliki berbagai kelemahan, mikroprosesortetap digunakan sebagai dasar dalam mempelajari mikrokontroler. Inti kerja dari keduanya adalah sama, yakni sebagai pengendali suatu sistem.
Mikrokontroler merupakan komputer di dalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil“ dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi / diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini. Dengan menggunakan mikrokontroler ini maka:
a. Sistem elektronik akan menjadi lebih ringkas.
c. Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak. Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran input dan output (I/O). dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa bagian yang langsung bisa dimanfaatkan, misalnya port paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital (ADC), dan sebagainya hanya menggunakan Minimum System yang tidak rumit atau kompleks.
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam suatu kemasan IC. Mikrokontroler AVR (Alf and Vegard’s RISC processor) standar memiliki arsitektur 8-bit, dimana semua instruksi dikemas dalam kode 16- bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CISC (seperti komputer).
ATMega 8535 sebagai mikrokontroler yang powerfull. Adapun blok diagramnya sebagai berikut :
Gambar 2.1 Blok diagram atmega8535
Dari gambar tersebut dapat dilihat bahwa ATMega 8535 memiliki bagiansebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D. 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11. Antarmuka komparator analog..
Kapabiltas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit bebrbasis RISC dengan kecepatan maksimal 16 MHz.
2. Kapabiltas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
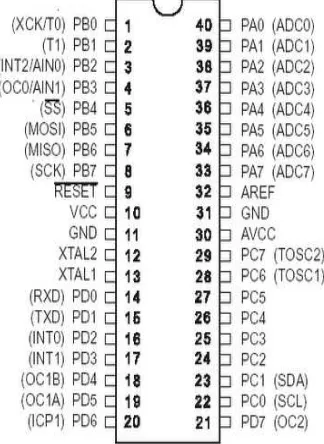
2.2.1. Konfigurasi PIN ATMega8535
Mikrokontroler ATMega8535 mempunyai jumlah pin sebanyak 40 buah, dimana 32 pin digunakan untuk keperluan port I/O yang dapat menjadi pin input/output sesuai konfigurasi. Pada 32 pin tersebut terbagi atas 4 bagian (port), yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk keperluan rangkaian osilator, supply tegangan, reset, serta tegangan referensi untuk ADC. Untuk lebih jelasnya, konfigurasi pin ATMega8535 dapat dilihat pada gambar 2.2.
Berikut ini adalah susunan pin-pin dari ATMega8535 :
a. VCC merupakan pin yang berfungsi sebagai pin masukkan catu daya
b. GND merupakan pin ground
c. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC
d. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, Komparator Analog, dan SPI
e. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, Komparator Analog, dan Timer Oscilator
f. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Komparator Analog, Interupsi Iksternal dan komunikasi serial USART
g. Reset merupakan pin yang digunakan untuk mereset mikrokontroler
2.2.2. Peta Memori ATMega8535
ATMega8535 memiliki dua jenis memori yaituProgram Memory dan Data Memoryditambah satu fitur tambahan yaitu EEPROMMemory untuk penyimpan data.
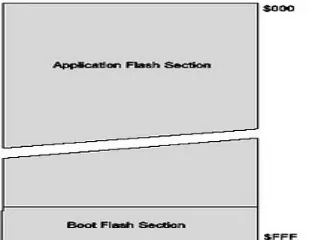
a. Program Memory
ATMEGA 8535 memilikiOn-Chip In-SystemReprogrammable
Flash Memory untuk menyimpan program.Untuk alasan
keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section.Boot Flash Section
digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan
program aplikasi yang dibuat user. AVR tidak dapat menjalakan program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat deprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman.
b. Data Memory
Gambar berikut menunjukkan peta memori SRAM pada ATMEGA 8535. Terdapat 608 lokasi address data memori. 96 lokasi address digunakan untuk Register File dan I/O Memory sementara 512 likasi address lainnya digunakan untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiri dari 64 register.
Gambar 2.4 Peta memori data
c. EEPROM Data Memory
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Lokasinya terpisah dengan system address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.2.3. Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yangdilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPUmikrokontroler.
Gambar 2.6 Status register atmega8535
a. Bit 7 – I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan. Bit ini akanclear ketika ada interrupt yang dipicu dari hardware, setelah program interrupt dieksekusi,maka bit ini harus di set kembali dengan instruksi SEI.
b. Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalamoperasi bit.
c. Bit 5 – H: Half Carry Flag
d. Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement OverflowFlag V.
e. Bit 3 – V : Two’s Complement Overflow Flag
Digunakan dalam operasi aritmatika f. Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
g. Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghaslkan bilangan nol, maka bit ini akan set.
h. Bit 0 – C : Carry Flag
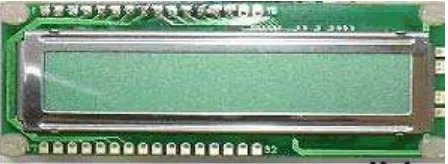
2.3.Liquid Crystal Display (LCD)
LCD (Liquid cristal display) adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. Jenis LCD yang dipakai pada alat ini adalah LCD M1632. LCD terdiri dari dua bagian, yang pertama merupakan panel LCD sebagai media penampil informasi dalam bentuk huruf/angka dua baris, masing–masing baris bisa menampung 16 huruf/angka.LCD (Liquid Crystal Display) adalah modul penampil yang banyak digunakan karena tampilannya menarik. LCD yang umum, ada yang panjangnya hingga 40 karakter (2x40 dan 4x40), dimana kita menggunakan DDRAM untuk mengatur tempat penyimpanan tersebut. Di bawah ini adalah gambar LCD 2x16 karakter.
Gambar 2.7.Lcd karakter 16x2
Bagian kedua merupakan sebuah sistem yang dibentuk dengan mikrokontroler yang ditempel dibalik pada panel LCD, berfungsi mengatur tampilan LCD. Dengan demikian pemakaian LCD M1632 menjadi sederhana, sistem lain cukup mengirimkan kode – kode ASCII dari informasi yang ditampilkan.
Spesifikasi LCD M1632:
1. Tampilan 16 karakter 2 baris dengan matrik 5 x 7 + kursor. 2. ROM pembangkit karakter 192 jenis.
3. RAM pembangkit karakter 8 jenis ( diprogram pemakai ). 4. RAM data tampilan 80 x 8 bit ( 8 karakter ).
5. Duty ratio 1/16.
6. RAM data tampilan dan RAM pembangkit karakter dapat dibaca dariunit mikroprosesor.
character blink), penggeseran kursor ( crusor shift ) dan penggeseran tampilan (display shift).
8. Rangkaian pembangkit detak.
9. Rangkaian otomatis reset saat daya dinyalakan. 10. Catu daya tunggal +5 volt.
2.4 Motor
Motor merupakan perangkat elektromagnetik yang dapat mengubah energilistrik menjadi energi mekanik. Perubahan ini dilakukan dengan merubah tenagalistrik menjadi magnet yang disebut sebagai elektromagnit. Sebagaimana kita ketahuibahwa : kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutubtidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika kitamenempatkan sebuah magnet pada sebuah poros yang dapat berputar, dan magnetyang lain pada suatu kedudukan yang tetap. Dengan cara inilah energi listrik dapat diubah menjadi energi mekanik.
Energi mekanik ini diguanakan untuk, misalnya memutar impeler pompa, fanatau blower, menggerakkan kompresor, mengangkat bahan, dll. Motor listrikdigunakan juga dirumah (mixer, bor listrik, afan angin) dan industri. Motor listrikkadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motormenggunakan sekitar 70% beban total industri. Secara umum motor listrik dapat dibagi menjadi motor ac dan motor dc,bembagian ini berdasarkan pada arus listrik yang digunakan untuk menggerakkannya.Namun penulis pada bagian ini kita hanya membahas mengenai motor dc
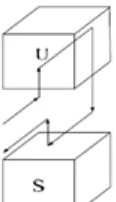
2.4.1.Motor DC
kerja arus searah adalahmembalik phasa tegangan dari gelombang yang mempunyai nilai positif denganmenggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparanjangkar yang berputar dalam medan magnet. Bentuk motor yang paling sederhanamemiliki kumparan satu lilitan yang bisa berputar bebas diantara kutub-kutub magnetpermanen
Gambar 2.8. Struktur motor dc sederhana
Catu tegangan dc dari baterai menuju lilitan melalui sikat menyentuh komutator duasegmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambardiatas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yangberputar diantara medan magnet.
Motor ini memiliki keunggulan dari motor ac yaitu mudah dalam mengaturdan mengontrol kecepatan putarnya. Ada bebarapa cara untuk dapat mengendalikankecepatan motor dc, antara lain dengan mengatur lebar pulsa tegangan setiap detiknyayang diberikan pada motor dc (teknik PWM) atau secara manual yaitu mengataurjumlah arus dan tegangan yang diberikan pada motor dc. Pada penelitian ini penulisakan mengendalikan kecepatan putar motor dc dengan mengatur tegangan yangdiberikan pada motor dc
Motor dc tersedia dalam banyak ukuran, namun penggunaannya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedangseperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dalamperubahan arah arus listrik mekanis pada ukuran yang lebih basar. Juga, motortersebut dibatasi hanya untuk penggunaan diarea yang bersih dan tidak berbahayasebab resiko percikan api pada sikatnya.
2.4.2.Prinsip Kerja Motor DC
Jika arus lewat pada suatu konduktor, timbul medan magnet disekitar konduktor. Arahmedan magnet ditentukan oleh arah aliran arus pada konduktor.
Gambar 2.10Medan magnet yang membawa arus mengelilingi konduktor
Aturan Genggaman Tangan kanan dapat dipakai untuk menentukan arah garisfluks disekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempolmengarah ada aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks.Medan magnet hanya terjadi disekitar sebuah konduktor jika ada arus yang mengalirpada konduktir tersebut. Pada motor listrik, konduktor berbentuuk U disebut
angkerdinamo.
Jika konduktor berbentuk U (angker dinamo) diletakkan diantara kutub utara danselatan yang kuat dalam medan magnet konduktor akan berinteraksi dengan magnetkutub
Gambar 2.12. Reaksi garis fluks
Lingkaran A dan B merupakan ujung konduktor yang dilengkungkan (loopedconductor). Arus mengalir masuk melalui ujung A dan keluar melalui ujung B.Medan konduktor A yang searah jarum jam akan menambah medan pada kutubdan menimbulkan medan yang kuat dibawah konduktor. Konduktor akan berusahabergerak kearah atas untuk keluar dari medan kuat ini. Medan konduktor B yangberlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkanmedan yang kuat diatas konduktor. Konduktor akan berusaha bergerak turun agarkeluar dari yang kuar tersebut. Gaya-gaya tersebut akan membuat angker dinamoberputar searah jarum jam.
Mekanisme kerja untuk seluruh jenis motor secara umum: a. Arus listrik dalam medan magnet akan memberikan gaya
b. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/ loop,maka kedua sisi loop, yaitu yaitu sudut kanan medan magnet, akan mendapatkangaya pada arah yang berlawanan.
c. Pasangan gaya menghasilkan tenaga putar/ torque untuk memutar kumparan.
Pada motor dc, daerah kumparan medan yang dialiri arus listrik akanmenghasilkan medan magnet yang melingkupi kumparan jangkar dengan arahtertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupunsebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet disiniselain berfungsi sebagai tempat untuk menyimpan energi sekaligus sebagai tempatberlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada gambar2.13 berikut.
Gambar 2.13. Prinsip kerja motor dc
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus dari pada tegangan gerak yang disebabkan reaksi lawan.Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan makamenimbulkan perputaran motor.Dalam memahami sebuah motor, penting dimengerti apa yang dimaksud denganbeban motor. Beban dalam hal ini mengacu kepada keluaran tegangan putar/ torquesesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikatagorikan dalamtiga kelompok: a. Beban Torque Konstan
Adalah beban dimana keluaran energinya bervariasi dengan kecepatan operasinyanamun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalahcorveyors, rotary kilns, dan pompa displacement konstan.
Adalah beban dengan torque bervariasi dengan kecepatan operasinya. Contohbeban dengan variabel torque adalah pompa sentrifugal dan fan (torque bervariasisebagai kuadrat kecepatan)
c. Beban dengan energi konstan
Adalah beban dengan permintaan torque yang berubah dan berbanding terbalikdengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-pralatan mesin industri
2.4.3.Karakteristik Motor DC
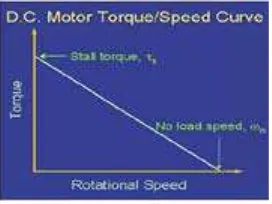
Karakteristik yang dimiliki suatu motor DC dapat digambarkan melalui kurvadaya dan kurva torsi/kecepatannya, dari kurva tersebut dapat dianalisa batasan-batasankerja dari motor serta daerah kerja optimum dari motor tersebut.
Gambar 2.14Kurva torsi vs kecepatan motor dc
Dari grafik terlihat hubungan antara torsi dan kecepatan untuk suatu motor dctertentu. dari grafik terlihat bahwa torsi berbanding terbalik dengan kecepatan putaran,dengan kata lain terdapat tradeoff antara besar torsi yang dihasilkan motor dengankecepatan putaran motor. Dua karakteristik penting terlihat dari grafik yaitu:
a. Stall torque, menunjukkan titik pada grafik dimana torsi maksimum, tetapi tidak ada putaran pada motor.
Pengembangan sebuah sistem menggunakan mikrokontroler AVR buatan ATMEL menggunakan software AVR STUDIO dan CodeVisionAVR. AVR STUDIO merupakan software yang digunakan untuk bahasa assembly yang mempunyai fungsi yang sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR. Sedangkan CodeVisionAVR merupakan software C-cross Compiler, dimana program dapat ditulis dalam bahasa C, CodeVision memiliki IDE (Integrated development Environment) yang lengkap, dimana penulisan program, compile,link, pembuatan kode mesin (assembler) dan download program ke chip AVR dapat dilakukan dengan CodeVision, selain itu ada fasilitas terminal, yaitu melakukan komunikasi serial dengan mikrokontroler yang sudah di program. Proses download program ke IC mikrokontroler AVR dapat menggunakan System Programmable Flash On-Chipmengizinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
2.5.1.CodeVisionAVR
CodeVisionAVR merupakan sebuah cross-compilerC,
Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP. Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded.
dengan Atmel STK500/AVRISP/AVRProg, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/development boards.
Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
1. Modul LCD alphanumeric 2. Bus I2C dari Philips
3. Sensor Suhu LM75 dari National Semiconductor
4. Real-Time Clock: PCF8563, PCF8583 dari Philips, DS1302 dan DS1307 dari Maxim/Dallas Semiconductor
5. Protokol 1-Wire dari Maxim/Dallas Semiconductor
6. Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
7. Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor 8. EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor 9. SPI
10. Power Management 11. Delay
12. Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengijinkan Anda untuk menulisdalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
6. Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
7. Inisialisasi Pembanding Analog 8. Inisialisasi ADC
9. Inisialisasi Antarmuka SPI 10. Inisialisasi Antarmuka Two-Wire 11. Inisialisasi Antarmuka CAN\
12. Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307
13. Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20 14. Inisialisasi modul LCD
2.6 Software Downloader
Untuk mengirimkan bilangan-bilangan heksadesimal ini ke mikrokontroller digunakan software ISP- Flash Programmer 3.0a yang dapat didownload dari internet.Tampilannya seperti gambar di bawah ini.
Gambar 2.15 ISP - flash programmer
BAB III
PERANCANGAN ALAT DAN PROGRAM
3.1.Perancangan Block Diagram Sistem
Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih komponen yang memiliki kesatuan kerja tersendiri, dan setiap blok komponen mempengaruhi komponen yang lainnya. Diagram blok merupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu sistem.Dengan diagram blok kita dapat menganalisa cara kerja rangkaian dan merancang hardware yang akan dibuat secara umum.
Adapun diagram blok dari system yang dirancang,seperti yang diperlihatkan pada gambar 3.1
Motor DC Mikrokontroler
PSA
Display LCD
Gambar3. 1Block diagram sistem
3.2.Fungsi Tiap Blok
1. Blok mikrokontroller : Mengolah data analog dari keluaran motor listrik
2. Blok Motor DC : Sebagai sensor yang akan diolah keluarannya oleh mikrokontroler
4. Blok LCD : Sebagai output data digital keluaran dari mikrokontroler
3.3.Rangkaian Mikrokontroler ATMega8535
Rangkaian sistem minimum mikrokontroler ATMEGA 8535 dapat dilihat pada gambar 3.2 di bawah ini :
Gambar 3.2 Rangkaian sistem minimum mikrokontroler atmega8535
Dari gambar 3.2, rangkaian tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada.Komponen utama dari rangkaian ini adalah IC Mikrokontroler ATMega8535.Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
Untuk men-download file heksadesimal ke mikrokontroler, Mosi, Miso, Sck, Reset, Vcc dan Gnd dari kaki mikrokontroler dihubungkan ke RJ45. RJ45 sebagai konektor yang akan dihubungkan ke ISP Programmer. Dari ISP Programmer inilah dihubungkan ke komputer melalui port paralel. Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroler terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP Programmer, maka pemograman mikrokontroler tidak dapat dilakukan karena mikrokontroler tidak akan bisa merespon.
3.4.Rangkaian Power Supply
Gambar3.3 Rangkaian Power Supply
tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi sebagai penguat arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran jembatandioda.
3.5.Pengaplikasian LCD
Rangkaian skematik konektor yang dihubungkan dari LCD (liquid crystal display) ke mikrokontroler dapat dilihat pada gambar dibawah ini.
Gambar 3.4. Rangkaian skematik konektor yang dihubungkan darilcd
3.6.Diagram Alir Program
Mulai
Inisiasi Program
Baca tegangan keluaran dari motor dc
Tampilkan hasil pengkuran di lcd
Selesai
Gambar 3.6. Flowchart prinsipkerja sistem
Keterangan :
BAB IV
PENGUJIAN RANGKAIAN DAN ANALISA PROGRAM
4.1 Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 40 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 20 dihubungkan dengan ground. Kemudian tegangan pada kaki 40 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega 8535, program yang diberikan adalah sebagai berikut:
#include <mega8535.h> #include <delay.h> #include <stdio.h> while (1)
{
// Place your code here PORTC=0x00;
Delay_ms(1000); PORTC=0xFF; Delay_ms(1000);
4.2.Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur
tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt.Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan tidak murni sebesar +9 Volt, tetapi +8.97Volt. Hasil tersebut dikarenakan beberapafaktor, diantaranya kualitas dari tiap-tiap komponen yang digunakannilainya tidak murni.Selain itu, tegangan jala-jala listrik yang digunakan tidak stabil.
4.3.Pengujian Rangkaian Liquid Crystal Display (LCD) 16 x 2
Pengujian ini bertujuan untuk mengetahui apakah LCD tersebut dapat menampilkan pesan-pesan sesuai dengan proses yang diharapkan. Listing program pengujian LCD :
Cls
LCD "Argo" Lowerline
LCD "Kecepatan"
Perintah di atas menampilkan teks "Argo" pada baris pertama dan "Kecepatan"pada baris kedua. Dengan tampilnya teks tersebut berarti menandakan modul LCD bekerja dengan baik.
4.4.Pengujian Rangkaian Keseluruhan
4.5.Analisa Program
Program keseluruhan dari sistem
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
AVR Core Clock frequency: 8,000000 MHz Memory model : Small
// Alphanumeric LCD functions #include <alcd.h>
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
// Wait for the AD conversion to complete while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10; return ADCW; }
// Declare your global variables here char lcd_buffer[33];
unsigned int temp; float vin;
void main(void) {
// Declare your local variables here // Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTA=0x00;
DDRA=0x00;
// Port B initialization
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In // State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTD=0x00;
DDRD=0x00;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected TCCR0=0x00;
TCNT0=0x00; OCR0=0x00;
// Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Discon. // OC1B output: Discon. // Noise Canceler: Off
// Compare A Match Interrupt: Off // Compare B Match Interrupt: Off TCCR1A=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0x00;
TCCR2=0x00; TCNT2=0x00; OCR2=0x00;
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off MCUCR=0x00; MCUCSR=0x00;
// USART initialization // USART disabled UCSRB=0x00;
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 1000,000 kHz // ADC Voltage Reference: AREF pin // ADC High Speed Mode: Off
// ADC Auto Trigger Source: Free Running ADMUX=ADC_VREF_TYPE & 0xff;
// Alphanumeric LCD initialization // Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu: // RS - PORTD Bit 0
// D4 - PORTD Bit 3 // D5 - PORTD Bit 4 // D6 - PORTD Bit 5 // D7 - PORTD Bit 6 // Characters/line: 16 lcd_init(16);
while (1) {
// Place your code here
temp=read_adc(2);
//v=((float)temp*n/n);
//t=t++; lcd_gotoxy(0,0);
lcd_putsf("Kecepatan"); lcd_gotoxy(0,1);
sprintf(lcd_buffer,"kec= %5.0d x",temp); lcd_puts(lcd_buffer);
delay_ms(500);
BAB V
KESIMPULAN DAN SARAN
5.1.Kesimpulan
Setelah dilakukan pengujian hasil perancangan alat ukur argometer menggunakan ADC berbasis mikrokontroler ATMega8535, dapat diambil beberapa kesimpulan:
1. Secara keseluruhan sistem alat berjalan dengan baik, dan telah dapat digunakan sesuai yang diharapkan penulis.
2. Penggunaan mikrokontroler dengan ADC internal dapat menyederhanakan rangkaian yang di rancang.
3. Tampilan LCD membuat alat ini lebih menarik dan teks terbaca cukup jelas.
5.2.Saran
Beberapa tambahan yang diperlukan dalam meningkatkan kemampuan alat ini adalah:
1. Dengan beberapa pengembangan dan penyempurnaan sistem dari alat ini akan dapat lebih baik lagi hasilnya.
2. Diharapakan kedepannya program tampilan interfacing dibuat menggunakan software java atau delphi agar tampilan lebih dinamis. 3. Kedepannya alat ini bisa dibandingkan dengan standar argometer agar
DAFTAR PUSTAKA
Bejo,Agus. 2005. C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATMega8535 . Edisi Pertama. Yogyakarta: Penerbit Gava Media.
Heryanto, M.Ary dan Wisnu Adi.2008.Pemrograman Untuk Mikrokontroler ATMEGA 8535.Yogyakarta: ANDI.
Lingga, W. 2006.Belajar sendiri Pemrograman AVR ATMega8535. Yogyakarta: Andi Offset.
Malvino, A. P. 1992. Prinsip-prinsip Elektronika. Jakarta: Erlangga.
Suhata.2005.Aplikasi Mikrokontroler Sebagai Pengendali Peralatan Elektronika.