1.1 Latar Belakang
Teknologi dibidang kelautan mengalami perkembangan yang baik. Para sivitas yang terjun ke dalamnya mulai menggunakan inovasi dan kreativitasnya sesuai dengan kebutuhan di lapangan. Di era digital saat ini, para ilmuwan membutuhkan perekaman gambar mengenai kegiatan di laut untuk menunjang keabsahan dari penelitiannya. Untuk memenuhi kebutuhan tersebut, diperlukan teknologi di bidang fotogrametri yang dapat diaplikasikan di lingkungan laut. Kegiatan di laut terutama saat berada di kapal mengalami banyak gangguan seperti gelombang laut. Keberhasilan pengambilan gambar saat di kapal
memerlukan kamera yang fokus terhadap gangguan pergerakan kapal yang tidak stabil. Kamera tersebut membutuhkan alat penstabil berupa gyroscope. Dengan bantuan alat ini, hasil perekaman gambar akan tetap fokus dan stabil.
Pemanfaatannya di dunia kelautan akan mendukung pengguna terutama para peneliti untuk mengabadikan gambar kondisi lingkungan laut saat pelayaran ataupun kegiatan di atas kapal.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah merancang instrumen yang dapat digunakan untuk mengambil gambar ketika berada di atas kapal menggunakan gyroscope.
2.1 Fotogrametri
Fotogrametri dapat didefisinikan sebagai ilmu untuk memperoleh
pengukuran-pengukuran yang terpercaya dari benda-benda di atas citra fotografik (Avery, 1990). Fotogrametri (Ligterink, 1987) sebagai kegiatan di mana aspek-aspek geometrik dari foto udara seperti sudut, jarak, koordinat dan sebagainya merupakan faktor utama. Interpretasi foto merupakan kegiatan dimana pengamat mempelajarinya dengan bekal pengetahuan dasar tentang titik-titik yang akan diukur.
Pada awalnya, fotogrametri untuk kegiatan menganalisis foto dari hasil suatu pemotretan. Saat ini, fotogrametri diperluas hingga meliputi analisis rekaman lain selain foto seperti, pancaran pola tenaga akustik dan gejala magnetik.
Pengembangan fotogrametri dengan metode akustik, memiliki ruang lingkup yang berbeda, karena cakupan hasil dari pengamatan yang diamati relative lebih sempit dan hanya dapat menggambarkan suatu obyek yang akan diamati. Obyek yang digambarkan akan terlihat jelas dengan hasil foto yang real time, menggambarkan obyek berupa bentuk dan luasan yang dapat dihitung sesuai dengan obyek
sebenarnya (Wolf, 1993).
2.1.1 Fotogrametri Terestrial
dengan alat penyangga lain yang dirancang secara khusus. Istilah “fotogrametri jarak dekat” pada umumnya digunakan untuk foto terrestrial yang mempunyai jarak obyek sampai dengan 300 meter. Orientasi sudut kamera biasanya dapat juga diukur atau diatur pada nilai-nilai tertentu sehingga semua unsur orientasi luar foto terrestrial pada umumnya diketahui dan tidak perlu dihitung.
Foto terrestrial dapat statis (foto obyek tetap) atau dinamis (foto obyek bergerak). Untuk foto statis, dapat digunakan film yang lambat, berbutir halus, dan dengan resolusi tinggi dan gambar dibuat dengan waktu pembukaan lensa lama. Pasangan stereoskopik dapat diperoleh dengan menggunakan kamera tunggal yang melakukan pemotretan pada kedua ujung garis basis. Dalam pengambilan foto terrestrial dinamis, perlu digunakan film cepat dan penutupan lensa dengan kecepatan tinggi. Fotogrametri terestrial menjadi alat yang sangat berguna dikarenakan pengukuran obyek yang sukar dicapai untuk pengukuran langsung dan tanpa menyentuh obyek (Wolf, 1993).
2.1.2 Distorsi
Pada pengambilan gambar, akan mengalami distorsi sebagai perubahan kedudukan suatu gambar pada suatu foto yang mengubah ciri-ciri perspektif gambar. Untuk fotogrametri (Paine, 1992), di antaranya :
1) Distorsi lensa, akan menyebabkan suatu gambar yang tampak lebih dekat atau lebih jauh dari titik dasar daripada kenyataannya.
3) Pergeseran fotografi, berubah langsung dengan jarak radial dari nadir ke obyek.
2.2 Kamera
Kamera dapat dilukiskan sebagai suatu bilik kedap sinar atau kotak di dalam mana sebuah obyek luar diproyeksikan pada film yang peka sinar melalui suatu lubang yang biasanya dilengkapi dengan sebuah lensa, penutup dan sebuah bukaan. Sebuah lensa kamera tersusun atas sekeping gelas atau beberapa keping gelas atau bahan transparan lainnya yang dibuat untuk membentuk sebuah gambar dengan cara pembiasan (Paine, 1992).
Model dan fungsi suatu kamera adalah serupa dengan mata manusia. Masing -masing terdiri dri bilik yang tertutup pada salah satu ujungnya dengan lensa dan film yang peka terhadap cahaya. Fungsinya sebagai retina pada ujung yang lain. Lensa mengumpulkan sinar yang dipantulkan oleh benda tertentu dan
meneruskannya menurut susunan dan ragamnya ke bagian yang peka terhadap cahaya. Suatu penutup kamera dipergunakan untuk mengatur jumlah dan lamanya cahaya yang mencapai film ketika melakukan pemotretan (Avery, 1990).
2.3 CCTV
Closed Circuit Television (CCTV) adalah alat perekam yang menggunakan satu atau lebih kamera video dan menghasilkan data video ataupun audio. Cara kerja kamera CCTV yaitu mengirimkan sinyal secara tertutup lewat melalui wireless ataupun kabel. Di dalam CCTV, terdapat motion detector, yang
detector adalah mendeteksi adanya perubahan pixel. Jika terjadi sebuah gerakan, maka kamera CCTV menganggap nilai piksel nya berubah dan akhirnya merekam perubahan tersebut (Anonymous1, 2012).
Dalam pengoperasian CCTV (Yuliansyah, 2010), dibutuhkan perangkat untuk menjalankannya yaitu: CCTV kamera, merupakan kamera yang diperlukan system CCTV untuk menerima signal video pada lokasi yang ingin dipantau; hard disk, merupakan media penyimpanan data rekaman; digital color quad processor, sebagai penerima signal video dari setiap kamera CCTV dan meneruskan signal output ke monitor; power cable, untuk menghubungkan dengan sumber listrik.
2.4 Gyroscope
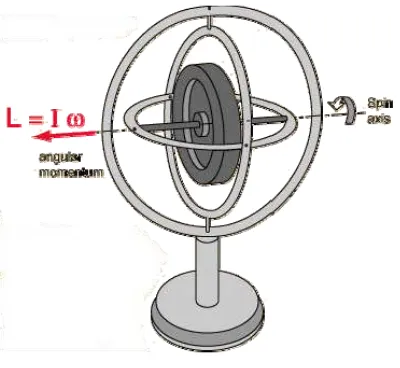
Gyroscope merupakan sebuah disk yang dipasang untuk berputar cepat sekitar sumbu dan berputar bebas sekitar satu atau kedua dari dua sumbu tegak lurus satu sama lain dan sumbu spin. Sehingga, rotasi salah satu dari dua sumbu yang saling tegak lurus merupakan hasil dari torsi saat roda berputar
(Anonymous3, 2012).
Gambar 1. Gyroscope
Gyroscope membutuhkan gimbal untuk mengarahkan kembali posisi dan menjaga sumbu putaran rotor dalam arah yang sama. Setiap perubahan
kemiringan sumbu rotasi ditolak oleh gerakan memutar (Anonymous2, 2012). Ketika terdapat kekuatan yang diterapkan untuk gyroscope cenderung untuk mengubah arah dari sumbu rotasi, sumbu akan bergerak dalam arah di sudut kanan ke arah dimana gaya diberikan (Anonymous3, 2012).
Ketika ring berputar, menyebabkan lingkaran itu mengubah sudut, tekanan tidak diterapkan ke depan atau belakang lingkaran seperti yang diinginkan, tetapi melawan arah. Tekanan ini, meskipun diterapkan terhadap sumbu horizontal, tidak menyebabkan lingkaran itu terjatuh, tetapi menyebabkan presesi sumbu vertikal pada sudut kanan ke tekanan yang diberikan, hasilnya akan mengarah ke arah yang baru (Anonymous3, 2012).
2.5 Akrilik
Akrilik (thermoplastic tembus pandang) atau polymethyl methacrylate
Gambar 2. Lempeng akrilik Sumber : Anonymous4, 2012
2.6 Motor
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Pembagian motor diletakkan pada sifat arus yang mengalir. Untuk itu, motor listrik terbagi menjadi dua yaitu motor arus bolak-balik (AC) dan motor arus searah (DC) (Gambar 3).
Gambar 3. Klasifikasi Jenis Utama Motor Listrik Sumber : Anonymous6, 2012
2.6.1 Motor DC
direct-unidirectional. Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah. Motor DC sering digunakan karena keuntungan utama adalah sebagai pengendali
kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Pengendalian motor DC dapat diatur dengan :
1. Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan.
2. Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
2.7 SolidWorks 2010
SolidWorks adalah sebuah program desain yang digunakan untuk merancang bagian dari mesin atau susunan bagian mesin yang berupa assembling dengan tampilan Computer Aided Design (CAD) 3D. Untuk merepresentasikan bagian demi bagian, dapat dibuat dengan tampilan 2D terlebih dahulu untuk
mendapatkan gambar 3D.
SolidWorks dapat membuat berbagai model tergantung keinginan dan kemampuan dari pemakai, tidak hanya terbatas pada model mekanik dan furniture. Untuk menjalankan program dapat menggunakan sistem operasi
Microsoft Windows. SolidWorks diperkenalkan pada tahun 1995 oleh perusahaan SolidWorks Corporation, anak perusahaan dari Dassault Systemes, S. A (Uthami, 2010).
3.1 Waktu dan Lokasi Penelitian
Penelitian ini dilaksanakan pada bulan Agustus 2011 – Juni 2012, di Laboratorium Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Kegiatan penelitian ini terdiri dari tiga bagian, yaitu perakitan instrumen, uji coba alat dan penyempurnaan instrumen. Uji coba instrumen di fokuskan kecepatan gyro untuk kembali ke posisi sumbu utama dengan perlakuan beda voltase, dan perlakuan goyangan pada kamera (di depan, belakang, serta kanan dan kiri).
3.2 Alat dan Bahan
Bahan yang digunakan memiliki daya tahan yang baik terhadap guncangan untuk digunakan pada observasi laut. Untuk mendesain kamera gyroscope menggunakan satu set laptop yang dilengkapi dengan perangkat lunak Google SketchUp 8. Perancangan desain, perakitan instrumen, uji coba, dan
penyempurnaan instrumen dilakukan di Laboratorium Akustik dan Instrumentasi Kelautan Departemen ITK, IPB.
Tabel 1. Alat, Bahan dan Spesifikasi
No Nama Spesifikasi Keterangan
1. Kamera digital CMOS Color dengan resolusi NTSC 510 x 492 dan Pal 628 x 582
Menangkap gambar
2. Wireless receiver RC310a
Untuk mengurangi
perkabelan 3. Kepingan besi diameter 10 cm, dengan
ketebalan 0.1 mm
Komponen gyroscope 4. Akrilik susu berbentuk lingkaran
berdiameter 15 cm dan 18 cm dengan ketebalan 1 cm
Komponen gyroscope
5. Akrilik Dibentuk segi empat ketebalan 0.3 mm dan 0.5 mm
Tempat tumpuan kamera
6. Kabel Hitam dan merah Penghubung antar kamera dengan baterai.
7. Baut 10 buah dengan ketebalan 0.2 mm
Penyambung antar lingkaran akrilik
8. Motor DC kecepatan 15.000 rpm Pemutar keping besi 9. Baterai kering 3 Volt, 6 Volt, dan 9 Volt Sumber energi 10. Lem Araldite dan SuperGlue Sebagai perekat
11. Laker 2 buah Penstabil baut
12. Laptop Zyrex Eclipse Media pengambilan gambar
13. TV Turner Menampilkan tangkapan
gambar oleh kamera ke laptop
14. Helm Media kamera
3.3 Rancangan Instrumen
3.3.1 Pembuatan Kerangka
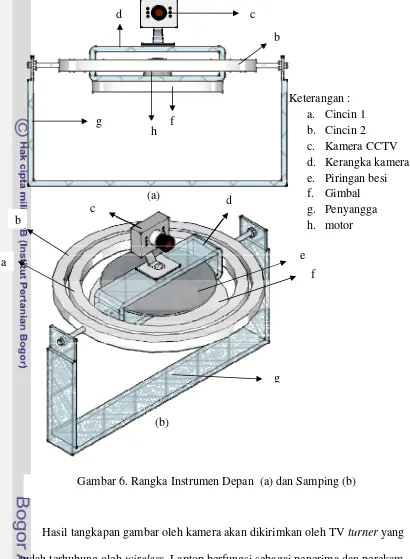
Rancangan instrumen kamera gyroscope menggunakan prinsip fotogrametri dalam perekaman gambar. Untuk penstabilan dalam pengambilan gambar menggunakan gyroscope. Gyroscope, dirakit terlebih dahulu menggunakan besi berdiameter 10 cm. Di bagian sisi-sisinya akan dibuat lingkaran yang berlubang, yang terbuat dari dua lempeng akrilik susu berdiameter 15 dan 18 cm, dengan ketebalan 1 cm.
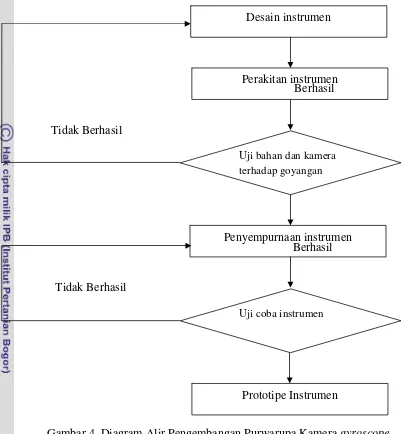
Tidak Berhasil
Desain instrumen
Perakitan instrumen
Uji bahan dan kamera terhadap goyangan
Penyempurnaan instrumen
Uji coba instrumen
Prototipe Instrumen Berhasil
Gambar 4. Diagram Alir Pengembangan Purwarupa Kamera gyroscope Tidak Berhasil
Hasil tangkapan gambar oleh kamera akan dikirimkan oleh TV turner yang sudah terhubung oleh wireless. Laptop berfungsi sebagai penerima dan perekam gambar sesuai dengan kebutuhan pengguna.
3.3.2 Uji Coba
Ditujukan untuk melihat kinerja (performance) kamera gyroscope terhadap perilaku roll (gerakan depan belakang) dan kiri kanan dengan menggunakan perlakuan prinsip momen inersia:
ܫ ൌ ݉ ൈ ܴଶൈ ߱
Perlakuan yang dilakukan adalah kegiatan uji, memberikan goyangan pada platform sebanyak 10 kali arah roll (depan belakang) yang timbul pada kamera gyroscope.
3.3.3 Pengambilan Gambar
Pengambilan gambar menggunakan kamera CCTV Color CMOS yang dihubungkan dengan komputer. Perangkat yang berperan sebagai penyambung adalah wireless. Program yang digunakan adalah TV Home. Proses pengambilan gambar dilakukan sesuai dengan Gambar 7.
Gambar 7. Diagram Alir Pengambilan Gambar dengan Komponen Kamera Setting kamera di
program TV Home
Setting voltase di adaptor
Ambil gambar Klik Capture di
program
Gambar atau video tersimpan dalam folder local disk C:
4.1 Struktur Dasar Kamera Gyroscope
Perakitan kamera gyroscope, diawali dengan pembentukan rangka dengan
menggunakan pipa paralon 4 inchi dan keping CD sebagai gyroscope. Di bagian
bawahnya diletakkan pemberat sebagai massa untuk gyroscope. Adanya
perputaran motor DC di atas pemberat memberikan massa dan gaya gravitasi yang
cukup besar. Dengan bahan-bahan seperti pipa dan keping CD tidak dapat
bertahan lama apabila instrumen dijalankan. Untuk mengatasi permasalahan
tersebut, bahan-bahan yang digunakan harus mempunyai karakteristik yang lebih
kuat untuk menghadapi pergerakan guncangan ketika melakukan observasi di
kapal.
4.1.1 Kerangka Kamera Gyroscope
Kamera yang digunakan adalah kamera digital CMOS Color dengan resolusi
NTSC 510 x 492 dan PAL 628 x 582. Untuk kerangka kamera, akrilik dibentuk
segi empat sebagai tempat menempelnya kamera. Penghubung kamera dengan
akrilik menggunakan baut bukan lem Araldite. Penggunaan baut ini membuat
Gambar 8. Kerangka kamera
4.1.2 Cincin-cincin Akrilik
Sebagai pertimbangan dalam proses pembuatan gyroscope, digunakan
bahan-bahan seperti akrilik susu untuk menggantikan pipa paralon. Pemilihan bahan-bahan
akrilik susu dikarenakan karakteristik bahan yang kuat. Akrilik susu dipotong
melingkar dengan diameter 15 cm untuk lingkaran pertama, dan diameter 18 cm
untuk lingkaran kedua.
Gambar 9. Cincin-cincin Akrilik pada Kamera Gyroscope
Pada prinsip gyroscope, memerlukan cincin-cincin yang berputar pada
memungkinkan cincin bergerak bebas. Untuk penelitian ini, hanya digunakan
satu sumbu yaitu horizontal. Sehingga, pada percobaan cincin-cincin akan
berputar bebas namun tetap pada sumbunya.
4.1.3 Motor Penggerak
Motor penggerak pada kamera gyroscope digunakan sebagai motor gyro.
Motor DC terbagi dari dua bagian, yaitu kumparan medan pada motor dc atau
stator, bagian yang tidak berputar dan kumparan jangkar atau rotor, bagian yang
berputar. Untuk membentuk gyro, kumparan jangkar motor dilekatkan dengan
kepingan besi. Pergerakan motor akan berbanding terbalik dengan arah
pergerakan kamera, sehingga motor berfungsi sebagai penstabil kamera dibantu
oleh gimbal. Motor DC yang digunakan pada penelitian adalah motor DVD player
pada komputer dengan tipe RF-300F-12350.
Gambar 10. Motor DC RF-300F-12350
4.1.4 Gimbal
Gimbal pada kamera gyroscope, diletakkan di posisi bawah kerangka akrilik
kotak. Fungsi dari gimbal adalah sebagai pemberat. Adanya gimbal membantu
tetap kembali pada posisi tegak lurus terhadap sumbu. Pemberat yang diletakkan
berupa dua kepingan besi berdiameter 10 cm dengan berat 100 gram per keping.
Kedua kepingan besi dilekatkan pada akrilik susu berdiameter 12,5 cm dengan
massa 50 gram. Keseluruhan massa gyroscope adalah 250 gram.
Gambar 11. Gimbal
4.1.5 Helm
Tahapan akhir dari perakitan instrument yaitu menempelkan semua
komponen jadi ke helm. Penggunaan helm ditujukan untuk kenyamanan pengguna
di lapang terutama di atas kapal dimana suasana dipengaruhi oleh
gelombang-gelombang laut. Helm yang dipakai adalah helm jadi yang dapat ditemukan di
pasaran. Pelakatan helm ke komponen kamera menggunakan media perantara
Gambar 12. Helm beserta Perlakuan Uji Cobanya
Helm yang sudah terpasang komponen kamera diberikan berbagai
perlakuan seperti Gambar 12. Perlakuannya adalah menggerakkannya ke kanan,
kiri, belakang dan depan. Di komponen kamera masih terhubung dengan aliran
listrik untuk membuat kamera bekerja.
4.2 Hasil Uji Coba
Pada uji coba, posisi kamera dihadapkan pada sebuah kertas yang sudah
diberi tanda silang dengan spidol hitam. Perlakuan tersebut dimaksudkan untuk
mengetahui focus dari tangkapan kamera. Hasil yang didapatkan dari penelitian
ini adalah berupa foto dan video yang ditangkap oleh kamera CCTV.
4.2.1 Pergerakan Gyro
Pada penelitian ini, gyroscope yang dilakukan merupakan perpaduan antara
diatur oleh voltase yang dikeluarkan oleh adaptor. Untuk uji coba gyroscope ada
dua perlakuan, yaitu :
1. Dilakukan perlakuan beda voltase yaitu 3.0 Volt, 4.5 Volt, dan 6.0 Volt.
2. Perlakuan berikutnya adalah dengan tekanan yang diberikan berupa
guncangan pada sisi kerangka gyroscope di sebelah kiri hingga posisi
mendatar. Setelah itu, guncangan pada sisi sebelah kanan hingga posisi
mendatar. Uji coba ini dilakukan dalam memperhitungkan waktu antara
gyroscope yang diberikan tekanan hingga ke posisi mendatar. Sumbu x
memiliki waktu yang dibutuhkan berbeda-beda pada tiap voltase dalam
setiap pengujiannya.
Beda voltase bertujuan untuk mencari voltase yang terbaik untuk pergerakan
gyro. Untuk mengetahui performa kamera gyroscope, dilakukan percobaan
dengan memberikan tekanan kepada kerangka gyroscope. Pertama, gyroscope
diberikan tekanan dengan posisi bebas, dimana tidak ada tekanan yang lebih di
antara beberapa sisi-sisinya. Pergerakan gyroscope berputar akan mengalami
perlambatan hingga akhirnya berhenti. Putaran gyroscope akan mengarah seperti
jarum jam, berotasi ke arah kanan.
4.2.1.1 Gerak Bebas
Uji pertama, dilakukan perlakuan terhadap gyroscope yang berputar bebas tanpa adanya tekanan. Voltase yang diatur pada adaptor adalah 3.0 Volt, 4.5 Volt
dan 6.0 Volt. Perlakuan bebas untuk uji pertama ini untuk melihat keseimbangan
melihat interaksi komponen gyroscope dengan kamera. Hasil uji pertama ini
sesuai dengan Tabel 2 dan Gambar 13.
Tabel 2. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk Perlakuan Gerakan Bebas Ke posisi mendatar
Gambar 13. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Gerakan Bebas hingga ke Posisi Mendatar
Uji dengan perlakuan gerakan bebas menunjukkan bahwa 4.5 Volt
mempunyai nilai rata-rata yang lebih rendah dibandingkan dengan 3.0 Volt dan
2.9 2.82
Rata-rata dengan yang lain tidak berbeda jauh
6.0 Volt. Nilai rata-rata 4.5 Volt yaitu 2.82 detik. Untuk 3.0 Volt tidak berbeda
terlalu jauh dengan 4.5 Volt dengan nilai 2.90 detik. Sedangkan 6.0 Volt
mempunyai nilai 3.65 detik, dengan selisih nilai 0.83 detik dari 4.5 Volt.
Standar deviasi terendah juga dimiliki oleh 4.5 Volt dengan nilai 0.77.
Standar deviasi 3.0 Volt dan 6.0 Volt mempunyai nilai 1.33 dan 1.31. Pemberian
daya 3.0 Volt dan 6.0 Volt tidak berbeda terlalu nyata dilihat dari standar
deviasinya.
Hasil uji-F nilai-p (0.23) > alpha 5% maka terima H0 artinya semua jenis
volt memberikan respon yang sama. Tidak ada perbedaan yang mencolok antara
ketiga voltase yang diberikan. Hal ini dapat dibuktikan dengan pengelompokkan
berdasarkan uji Duncan terlihat bahwa semua jenis volt memiliki superscript yang
sama yang dapat dilihat pada tabel 2 dan lampiran 3.
(1) Pergerakan Gyroscope dengan 3.0 Volt
Pada posisi pertama dengan 3.0 Volt, gyroscope berputar dengan bebas,
namun daya yang diberikan oleh adaptor tidak berjalan secara optimal.
Pergerakan yang mendatar diharapkan ada perputaran yang disebabkan oleh
voltase, namun tidak berpengaruh dominan. Putaran gyroscope lebih dikarenakan
gaya gravitasi yang mempengaruhi gyroscope.
Pada perlakuan di ulangan gyroscope pertama, membutuhkan waktu selama
3 detik untuk mengembalikan posisinya ke sumbu x. Ulangan kedua, gyroscope
tidak kembali pada waktu yang sama seperti ulangan pertama. Untuk bergerak
antara ulangan pertama dan kedua, disebabkan gyroscope masih berputar dengan
pengaruh kecepatan voltase yang diberikan adaptor.
Setelah ulangan pertama dan kedua, gyroscope berputar dipengaruhi oleh
gaya gravitasi. Pengaruh kecepatan voltase yang diberikan oleh adaptor tidak
terlalu dominan. Akibatnya, gyroscope berputar dengan pengaruh gaya gravitasi
dan sudut mulai gyroscope berputar. Semakin kecil sudut mula gerak gyroscope,
akan mempercepat gyroscope untuk kembali kepada posisi mendatar. Perlakuan
ini terjadi pada ulangan ke-3 dan ke-6, yang membuat gyroscope berputar dengan
cepat. Untuk ulangan ke-3, gyroscope memerlukan waktu 2 detik, sedangkan
ulangan ke-6, memerlukan waktu 1 detik. Di sisa ulangan lainnya, gyroscope
berputar pada kisaran 3 detik dengan sudut yang sama, yaitu 45o.
(2) Pergerakan Gyroscope dengan 4.5 Volt
Pada posisi kedua dengan 4.5 Volt, gyroscope berputar dengan bebas dengan
daya yang diberikan oleh adaptor secara optimal. Pergerakan tidak terlalu
didominasi oleh gaya gravitasi seperti pada uji voltase 3.0 Volt. Pergerakannya
halus, dan mampu menempatkan gyroscope dengan kecepatan yang konstan untuk
ke posisi mendatar tergantung dari sudut dimulainya gerakan.
Pergerakan gyroscope, dari kesepuluh ulangan didapatkan nilai yang
berbeda-beda. Hal ini dikarenakan perbedaan sudut yang diberikan tiap
masing-masing ulangan. Di ulangan kelima, terlihat lamanya waktu untuk kembali
kepada posisi mendatar membutuhkan waktu selama 4.5 – 5.0 detik. Sedangkan
ulangan ke-2, 7 dan 8 berkisar antara 2.0 – 2.5 detik. Semakin lama gyroscope
kelima, sudut yang diberikan yaitu lebih dari 90o. Kesembilan ulangan berputar
dengan awalan sudut 15 – 90o.
(3) Pergerakan Gyroscope dengan 6.0 Volt
Pada pergerakan gyroscope dengan kecepatan 6.0 Volt, didapatkan bahwa
pergerakan dipengaruhi oleh voltase yang diberikan oleh adaptor. Hampir sama
dengan perlakuan 4.5 Volt, gyroscope tidak terlalu didominasi oleh gaya gravitasi.
Pergerakan gyroscope sendiri yang cepat, membuat gyroscope kembali kepada
posisi mendatar dengan waktu yang lebih lama dibandingkan dengan voltase
rendah.
Pada pergerakan awal gyroscope dengan kecepatan 6.0 Volt, gyroscope
cepat kembali kepada posisi mendatar, yaitu dengan kisaran 2 – 3 detik. Dari
setelah ulangan ketiga, waktu tempuh untuk gyroscope kembali kepada posisi
mendatar meningkat hingga 6 detik. Peningkatan waktu tempuh dikarenakan
kecepatan gyroscope yang semakin kencang dengan 6 Volt. Selain itu, sudut
mula dari awal pergerakan gyroscope juga mempengaruhi lamanyawaktu. Sudut
yang diberikan yaitu lebih dari 90o.
Pada ulangan yang ke-5 hingga ke 6, mengalami penurunan yang drastis.
Waktu tempuh yaitu 6.5 detik hingga 2.5 detik. Selisih waktu sebesar 4 detik.
Sedangkan pada ulangan ke-6 hingga 10, sudut yang diberikan berkisar 45o.
Waktu tempuh untuk kembali kepada posisi mendatar berkisar 3.5 – 4.5 detik.
Gangguan berupa getaran pada kamera terasa di gyroscope dengan daya 6.0
Volt. Getaran pada kamera mempengaruhi hasil gambar yang ditangkap menjadi
Volt, memberikan getaran pada kamera. Semakin besar voltase, maka getaran
semakin meningkat.
4.2.1.2 Perlakuan Uji Coba dengan Ditekan ke Depan
Uji yang kedua adalah perlakuan terhadap gyroscope berupa pemberian voltase yang berbeda-beda. Untuk kecepatan voltasenya, diberikan 3.0 Volt, 4.5
Volt dan 6.0 Volt. Pada pergerakan gyroscope dengan ditekan ke depan, putaran
gyroscope masih menyesuaikan dengan voltase dan sudut. Gaya gravitasi juga
ikut berpengaruh terutama di daya 3.0 Volt.
Tabel 3. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk Perlakuan Ditekan ke Depan untuk Ke Posisi Mendatar
Sumber DF Type III SS Rata-rata Square F Value Pr > F Volt 2 126.00 63.00 74.72 <.0001
Error 27 22.76 0.84
Rata-rata dengan yang lain tidak berbeda jauh
Grup Duncan Rata-rata N Volt
A 9.48 10 6
B 6.96 10 4.5
Gambar 14. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Ditekan ke Depan hingga ke Posisi Mendatar
Grafik uji statistik beda nilai tengah (Gambar 14) pada perlakuan gyroscope
dengan tekanan yang diberikan dari depan, menunjukkan nilai rata-rata yang tidak
dekat antara voltase satu dengan voltase lainnya. Di antara ketiga voltase, nilai
rata-rata yang paling rendah adalah 3.0 Volt dengan nilai 4.46 detik. Berbeda
halnya dengan perlakuan bebas, 4.5 Volt tidak dalam nilai rata-rata terendah. Nilai
tertinggi dimiliki oleh 6.0 Volt dengan rata-rata 9.48 detik. Daya 4.5 Volt
mempunyai nilai rata-rata 6.96 detik.
Standar deviasi pada perlakuan ditekan ke depan, menunjukkan bahwa 4.5
Volt tetap memiliki nilai terendah sama halnya dengan perlakuan gerakan bebas.
Pergerakan gyroscope dengan 4.5 Volt menghasilkan standar deviasi sebesar 0.79.
Kedua voltase lainnya mempunyai nilai yang tidak berbeda jauh. Untuk 3.0 Volt
sebesar 0.97, dan 6.0 Volt sebesar 0.97.
Dari hasil uji-F nilai –p (0.0001) < alpha 5% maka tolak H0 artinya minimal
ada satu jenis volt memberikan respon yang berbeda. Perbedaan respon dapat
terlihat dari pengelompokkan berdasarkan uji Duncan yang mendapatkan 6.0 Volt
dengan A, 4.5 Volt dengan B, dan 3.0 Volt dengan C yang dapat dilihat pada
tabel 3 dan lampiran 4.
(1) Pergerakan Gyroscope dengan 3.0 Volt
Pergerakan gyroscope dengan daya 3.0 Volt, tidak memberikan pengaruh
kecepatan yang diberikan oleh adaptor. Perputarannya didominasi gaya gravitasi
dan sudut. Untuk ulangan ketiga dan kedelapan, mempunyai waktu tempuh yang
cepat untuk ke posisi mendatar, dikarenakan perlakuan sudut yang diberikan lebih
kecil dibandingkan dengan ulangan lainnya. Kisaran waktunya dari 2.5 detik
hingga 3.5 detik. Sedangkan untuk sisa ulangan lainnya berada pada kisaran 4.0 –
6.0 Volt.
(2) Pergerakan Gyro dengan Voltase 4.5 Volt
Pergerakan gyroscope dengan daya 4.5 Volt memberikan waktu tempuh
untuk ke posisi mendatar lebih lama dibandingkan dengan 3.0 Volt. Pada ulangan
pertama, waktu yang dibutuhkan gyroscope untuk kembali pada sumbu x adalah 8
detik, setelah itu waktu perlahan menurun. Nilai waktu yang menurun drastis
pada ulangan keempat yang mempunyai nilai waktu 5.5 detik, dengan selisih
waktu 2.5 detik. Putaran gyroscope meningkat kembali di ulangan kelima. Di
ulangan berikutnya waktu tempuh berkisar di antara 6.0 – 7.5 Volt.
(3) Pergerakan Gyro dengan Voltase 6.0 Volt
Pergerakan gyroscope dengan 6.0 Volt, dipengaruhi oleh daya yang
diberikan adaptor. Waktu tempuh yang dialami gyroscope untuk ke posisi
mendatar lebih lama dibandingkan dengan daya yang rendah. Kisaran waktu yang
membuat waktu yang ditempuh lama, yaitu 11 detik. Setelah ulangan pertama,
gyroscope yang ditekan dengan sudut 45 – 60o, membuat waktu tempuh ke posisi
mendatar lebih cepat.
4.2.1.3 Perlakuan Uji Coba dengan Ditekan ke Belakang
Uji ketiga pada penelitian, yaitu memberikan ditekan ke belakang dengan
perlakuan beda kecepatan voltase. Daya yang diberikan adalah 3.0 Volt, 4.5 Volt
dan 6.0 Volt. Pada pergerakan gyroscope dengan ditekan ke belakang, putaran
gyroscope masih menyesuaikan dengan voltase dan sudut. Gaya gravitasi juga
ikut berpengaruh terutama di daya 3.0 Volt.
Tabel 4. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk Perlakuan Ditekan ke Belakang untuk Ke Posisi Mendatar
Sumber DF Type III SS Rata-rata Square F Value Pr > F Volt 2 155.61 77.80 70.71 <.0001
Error 27 29.71 1.10
Rata-rata dengan yang lain tidak berbeda jauh
Grup Duncan Rata-rata N Volt
A 9.48 10 6
B 6.96 10 4.5
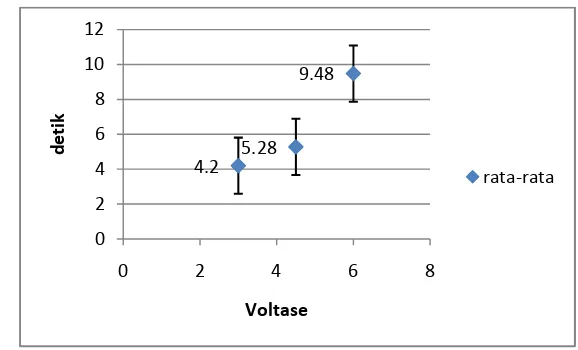
Gambar 15. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Ditekan ke Belakang hingga Ke posisi mendatar
Gambar 15 terlihat pengelompokkan ketiga voltase, menunjukkan nilai
rata-rata 6 Volt, 9.48 detik memiliki nilai lebih tinggi dibandingkan dengan voltase
lainnya. Penggunaan 3.0 Volt mempunyai nilai yang lebih rendah dengan 4.20
detik. Sama dengan perlakuan pada ditekan ke depan, 4.5 Volt dengan nilai 5.28
detik. Sehingga, menempati posisi urutan kedua.
Pemberian 4.5 Volt untuk ditekan ke belakang, sama dengan ditekan ke
depan, memiliki standar deviasi yang lebih rendah. Meskipun, nilai rata-ratanya
tidak pada nilai yang rendah. Nilai standar deviasi 6.0 Volt, 1.36, mempunyai
selisih lebih rendah 0.39 dari standar deviasi 3.0 Volt, 0.97.
Hasil uji-F nilai –p (0.0001) < alpha 5% maka tolak H0 artinya minimal ada
satu jenis volt memberikan respon yang berbeda. Perbedaan respon dapat terlihat
dari pengelompokkan berdasarkan uji Duncan yang mendapatkan 6.0 Volt dengan
(1) Pergerakan Gyroscope dengan 3.0 Volt
Pergerakan gyroscope bila diberikan ditekan ke belakang, waktu tempuh ke
posisi mendatar tidak konstan di tiap ulangannya. Hal ini disebabkan pemberian
daya 3.0 Volt tidak berpengaruh kuat terhadap gerakan. Gaya gravitasi lebih
dominan sejalan dengan posisi mulanya komponen keseluruhan kamera dan
gyroscope. Massa dari kamera yang lebih bertumpu di belakang mengakibatkan
pergerakan gyroscope lebih berat ke belakang.
Uji coba pada perlakuan ini, keseluruhan ulangan mempunyai kisaran waktu
dari 2.5 Volt - 7.0 Volt, dengan selisih waktu 4.5 Volt. Waktu tempuh tercepat
terjadi pada ulangan keempat, keenam dan kesembilan dengan kisaran waktu 2.5 -
4 detik. Waktu tempuh gyroscope ini dipengaruhi juga oleh sudut mula putaran.
(2) Pergerakan Gyroscope dengan 4.5 Volt
Perputaran gyroscope dengan 4.5 Volt, seperti perputaran dengan 3 Volt.
Massa kamera yang bertumpu di belakang mempengaruhi ketidakstabilan dari
putaran gyroscope. Waktu tempuh untuk ke posisi mendatar, di ulangan 2 paling
cepat dengan waktu 4.4 detik. Namun, waktu tersebut lebih lama dibandingkan
dengan 3.0 Volt yang memiliki waktu tercepat 2.5 - 3 detik.
Kesepuluh ulangan berkisar antara 4.4 - 6.4 detik, sehingga selisihnya hanya
2 detik. Selisih tersebut lebih cepat dibandingkan dengan 3.0 Volt, 4.5 detik. Di
ulangan keempat, kecepatan gyroscope untuk ke posisi mendatar lebih lama
dengan waktu 6.4 detik. Pada perlakuan tekannan dari belakang, sudut yang
(3) Pergerakan Gyroscope dengan 6.0 Volt
Kesepuluh ulangan, mempunyai kisaran waktu dari 7.5 – 11 detik. Selisih
waktunya yaitu 3.5 detik. Waktu tersebut lebih cepat dari 3.0 Volt, dan lebih lama
dari 4.5 Volt. Pengaruh gaya gravitasi tidak dominan. Selain itu, pengaruh massa
kamera juga tidak mempengaruhi putaran gyroscope. Mulanya gyroscope
membutuhkan waktu yang cepat untuk kembali ke posisi mendatar. Setelah itu,
lamanya waktu tempuh meningkat. Penurunan waktu tempuh di ulangan kelima
dan keenam tidak signifikan, dengan kisaran 2.5 detik.
4.2.1.4 Perlakuan Uji Coba dengan Ditekan ke Kanan
Uji keempat pada penelitian adalah memberikan ditekan ke kanan pada
gyroscope. Daya yang diberikan untuk uji, yaitu 3.0 Volt, 4.5 Volt dan 6.0 Volt.
Pada pergerakan gyroscope dengan ditekan ke kanan, putaran gyroscope masih
menyesuaikan dengan voltase dan sudut. Nilai uji yang diperoleh dapat dilihat
pada Tabel 5.
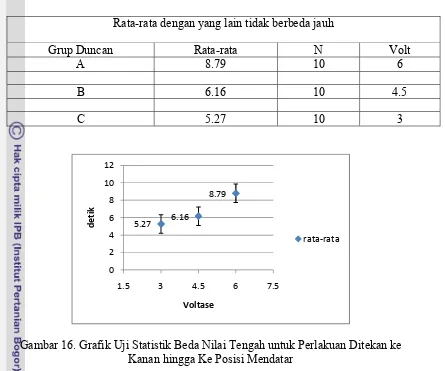
Tabel 5. Uji Annova dan Duncan di Uji Coba Pergerakan Gyroscope untuk Perlakuan Ditekan ke Kanan untuk Ke Posisi Mendatar
Gambar 16. Grafik Uji Statistik Beda Nilai Tengah untuk Perlakuan Ditekan ke Kanan hingga Ke Posisi Mendatar
Gambar 16 uji beda nilai tengah dengan perlakuan ditekan ke kanan
menunjukkan bahwa 3.0 Volt mempunyai nilai rata-rata terendah, 5.27 detik.
Nilai rata-rata tertinggi adalah 6.0 Volt dengan nilai 8.79 detik. Untuk 4.5 Volt,
nilai rata-ratanya sebesar 6.16 detik. Selisih rata-rata 4.5 Volt, tidak berbeda jauh
dengan 3V, hanya 0.89 detik.
Standar deviasi dari ketiga voltase, nilai terendahnya adalah 3.0 Volt, 0.63
Pergerakan di 4.5 Volt, memiliki standar deviasi 0.95. Nilai standar deviasi 4.5
Volt dengan 3.0 Volt tidak berbeda jauh, selisihnya 0.31. Sedangkan 6.0 Volt,
standar deviasinya tertinggi dengan nilai 1.00. Selisih waktu dengan 4.5 Volt yaitu
0.05.
Rata-rata dengan yang lain tidak berbeda jauh
Grup Duncan Rata-rata N Volt
A 8.79 10 6
B 6.16 10 4.5
Hasil uji-F nilai –p (0.0001) < α 5% maka tolak H0 artinya minimal ada satu
jenis volt memberikan respon yang berbeda. Perbedaan respon dapat terlihat dari
pengelompokkan berdasarkan uji Duncan yang mendapatkan 6.0 Volt dengan A,
4.5 Volt dengan B, dan 3.0 Volt dengan C yang dapat dilihat pada tabel 5 dan
lampiran 6.
(1) Pergerakan Gyroscope dengan 3.0 Volt
Perputaran gyroscope saat alat ditekan ke kanan pada 3.0 Volt memerlukan waktu 4 – 7.5 detik untuk kembali ke posisi mendatar. Sehingga selisih waktu
yang diperoleh yaitu 3.5 detik. Pada awalnya, gyroscope berputar selama 5.5
detik, kemudian waktunya bertambah hingga 7.5 detik. Setelah itu, terus
mengalami penurunan dan berfluktuasi di kisaran 4 – 5.5 detik. Pengaruh gaya
gravitasi berperan dominan dibandingkan dengan pemberian voltase.
(2) Pergerakan Gyroscope dengan 4.5 Volt
Pergerakan gyroscope dengan 4.5 Volt menunjukkan lebih stabil dan
konstan. Hal ini dapat disimpulkan dari kisaran waktunya yaitu 4.8 – 6.8 detik,
sehingga mempunyai selisih waktu 2 detik. Waktu tempuh tercepat berada pada
ulangan kedua yang berkisar 4.8 – 5 detik. Sisa ulangan lainnya, berkisar dari 5.8
– 6.8 detik. Pengaruh pergerakan didominasi oleh pemberian voltase, tidak
dipengaruhi gaya gravitasi seperti 3.0 Volt.
(3) Pergerakan Gyroscope dengan 6 Volt
Putaran gyroscope di 6.0 Volt menunjukkan fluktuasi dari kisaran 7.5 – 10.5
dengan 4.5 Volt. Namun, lebih cepat 0.5 detik daripada 3 Volt. Di perlakuan ini,
pengaruh voltase lebih dominan mengendalikan pergerakan gyroscope.
4.2.1.5 Perlakuan Uji Coba Gyroscope dengan Ditekan ke Kiri
Uji kelima pada penelitian, yaitu memberikan ditekan ke kiri pada
gyroscope. Daya yang diberikan untuk uji, yaitu 3.0 Volt, 4.5 Volt dan 6.0 Volt.
Pada pergerakan gyroscope dengan ditekan ke kiri, putaran gyroscope masih
menyesuaikan dengan voltase dan sudut.
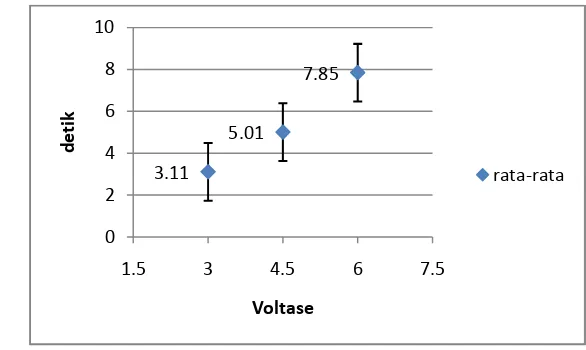
Tabe 6. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope Untuk Perlakuan Ditekan Ke Kiri Untuk Ke Posisi Mendatar
Sumber DF Type III SS Rata-rata Square F Value Pr > F Volt 2 113.81 56.90 100.01 <.0001
Error 27 15.36 0.56
Total 29 129.17
Tingkatan volt
N Respon Rata-rata Std Dev
3 10 3.11 0.43
4.5 10 5.01 0.55
6 10 7.85 1.10
Rata-rata dengan yang lain tidak berbeda jauh
Grup Duncan Rata-rata N Volt
A 7.85 10 6
B 5.01 10 4.5
Gambar 17. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Ditekan ke Kiri hingga Ke Posisi Mendatar
Grafik uji statistik beda nilai tengah di perlakuan ditekan ke kiri
menunjukkan komposisi yang sama seperti uji perlakuan lainnya. Komposisi dari
kelompok voltase dari terendah ke tinggi yaitu 3 Volt, nilai rata-rata 3.11 detik,
4.5 Volt, 5.01 detik dan 6.0 Volt, 7.85 detik.
Standar deviasi dari uji perlakuan ditekan ke kiri berbeda hal nya dengan
keempat uji. Nilai deviasi terendah berada pada 3 Volt dengan nilai 0.43.
Sedangkan 4.5 Volt mempunyai nilai tidak berbeda jauh dengan 3.0 Volt yaitu
0.55. Selisih deviasi dari kedua voltase tersebut adalah 0.12. Standar deviasi
tertinggi berada pada 6.0 Volt sebesar 1.10.
Hasil uji-F nilai –p (0.0001) < alpha 5% maka tolak H0 artinya minimal ada
satu jenis volt memberikan respon yang berbeda. Perbedaan respon dapat terlihat
dari pengelompokkan berdasarkan uji Duncan yang mendapatkan 6.0 Volt dengan
(1) Pergerakan Gyroscope dengan 3.0 Volt
Pada 3.0 Volt, pergerakan gyroscope lebih cepat bila diberi ditekan ke kiri.
Kisaran waktu tempuh untuk kembali kepada posisi mendatar antara 2.2 – 3.8
detik. Selisih waktunya adalah 1.6 detik. Namun, kecepatan waktu putaran
gyroscope tetap dipengaruhi oleh gaya gravitasi. Sama seperti dengan keempat
perlakuan lainnya. Perlakuan sudut juga berpengaruh terhadap lamanya waktu.
Waktu tercepat untuk kembali kepada posisi mendatar, didapatkan pada ulangan
ketujuh dengan 2.4 detik. Sedangkan waktu yang terlama di ulangan kelima
dengan waktu 3.6 – 3.8 detik.
(2) Pergerakan Gyroscope dengan 4.5 Volt
Pergerakan gyroscope dengan ditekan ke kiri pada 4.5 Volt memperlihatkan
bahwa kisaran waktunya antara 4.2 – 6.0 Volt. Selisih waktunya adalah 1.8 detik.
Waktu tersebut lebih lama 0.2 detik daripada 3.0 Volt. Pergerakan gyroscope
dipengaruhi oleh dominasi voltase, dan minim gaya gravitasi. Sudut yang
diberikan untuk mulai putaran juga berpengaruh. Fluktuasi waktu untuk
gyroscope berputar terlihat konstan dikarenakan selisih waktunya yang cepat.
(3) Pergerakan Gyroscope dengan 6.0 Volt
Kesepuluh ulangan, mempunyai kisaran waktu dari 6.5 – 11 detik. Selisih
waktunya yaitu 4.5 detik. Waktu tersebut paling lama diantara uji coba lainnya
pada perlakuan ditekan ke kiri. Mulanya, gyroscope berputar dengan lama waktu
6.5 – 8.5 detik. Di ulangan kedelapan, terjadi peningkatan waktu waktu tempuh
gyroscope hingga kisaran 10.5 -11 detik. Setelah itu, kembali pada kisaran waktu
4.2.1.6 Keseluruhan
Secara keseluruhan uji coba didapatkan beda hasil pergerakan gyroscope.
Faktor-faktor yang mempengaruhi pergerakan gyroscope adalah sudut mula
tekanan, gaya gravitasi, kekuatan voltase yang diberikan dan massa dari kamera
(yang mempengaruhi perlakuan ditekan ke belakang).
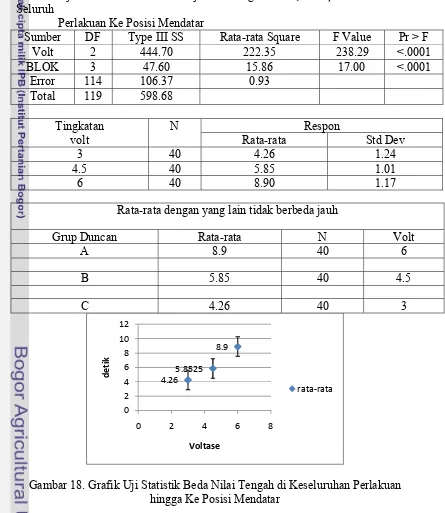
Tabel 7. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope Untuk Seluruh
Gambar 18. Grafik Uji Statistik Beda Nilai Tengah di Keseluruhan Perlakuan hingga Ke Posisi Mendatar
4.26
Rata-rata dengan yang lain tidak berbeda jauh
Grup Duncan Rata-rata N Volt
A 8.9 40 6
B 5.85 40 4.5
Pemberian voltase yang berbeda yaitu 3.0 Volt, 4.5 Volt dan 6.0 Volt
menghasilkan perbedaan gerak gyroscope. Nilai rata-rata waktu tempuh tertinggi
yaitu 6.0 Volt dengan 8.90 detik. Hal ini memperlihatkan bahwa semakin tinggi
nilai rata-ratanya, semakin lama waktu tempuh untuk gyroscope kembali kepada
posisi mendatar setelah diberikan perlakuan. Lamanya waktu tempuh pada 6.0
Volt, disebabkan oleh voltase yang diberikan oleh adaptor.
Nilai rata terendah yaitu 3.0 Volt, 4.26 detik. Semakin rendah nilai
rata-ratanya, semakin cepat gyroscope berputar. Sehingga, waktu tempuh untuk ke
posisi mendatar lebih cepat. Kecepatan dari 3.0 Volt dipengaruhi oleh gaya
gravitasi yang mendominasi pergerakan. Pada 3.0 Volt, kecepatannya sedikit
dipengaruhi oleh pemberian voltase. Hal ini berbeda dengan 6.0 Volt yang
didominasi oleh pengaruh voltase.
Di antara semua uji, perlakuan gyroscope di 4.5 Volt, 5.85 detik dirasa lebih
baik. Hal ini diperkuat dengan pergerakan gyroscope yang dipengaruhi oleh gaya
gravitasi dan voltase yang diberikan oleh adaptor. Kedua pengaruh pergerakan
tersebut tidak ada yang dominan. Sehingga, pergerakan gyroscope lebih stabil.
Standar deviasi yang ditunjukkan oleh uji stastistik, memperlihatkan
keheterogenan yang terjadi dalam data yang sedang diteliti atau dapat dikatakan
sebagai jumlah rata-rata variabilitas di dalam satu set data pengamatan. Semakin
besar nilai standar deviasi, maka semakin besar jarak rata-rata setiap unit data
Standar deviasi diantara ketiga voltase, 4.5 Volt menempati nilai terendah,
1.01. Kondisi ini menunjukkan bahwa jarak rata-rata setiap unit data terhadap
rata-ratanya kecil. Selain itu, memiliki kecenderungan setiap data tidak berbeda
satu sama lain. Kisaran waktu tempuhnya stabil. Hal ini memperkuat penegasan,
4.5 Volt lebih baik digunakan sebagai voltase yang cocok untuk kamera
gyroscope observasi di kapal.
Uji coba di 3.0 Volt, standar deviasinya menempati nilai tertinggi 1.24.
Standar deviasi yang tinggi memperlihatkan jarak rata-rata setiap unit terhadap
rata-ratanya besar. Hal ini menandakan semakin menyebarnya data dan memiliki
kecendrungan setiap data berbeda satu sama lain. Standar deviasi 6 Volt, berada
di posisi kedua (tengah) dengan nilai 1.17. Nilai tersebut tidak terlalu jauh dari
standar deviasi 3.0 Volt dan 4.5 Volt yang dapat dilihat pada tabel 7 dan lampiran
8.
4.2.2 Pergerakan Kamera
Saat dioperasikan, kamera bergerak mengikuti dinamika gerak gyroscope.
Dari hasil uji coba, diketahui bahwa ada gangguan pada kamera ketika gyroscope
bekerja. Semakin besar nilai voltase yang diberikan, semakin lama (noise) muncul
saat kamera mulai merekam. Getaran mulai dirasakan saat memasuki voltase 6.0
dan tidak dirasakan pada 3.0 Volt dan 4.5 Volt.
Nilai voltase yang lebih dari 6.0 Volt, pada gyroscope tidak menunjukkan
adanya getaran pada kamera. Namun, beberapa detik ke depannya, mengalami
adalah cat pada permukaan kepingan besi yang tidak halus, sehingga perputaran
gyroscope akan memicu kepingan besi berputar dan bergetar.
4.2.3 Hasil Gambar
Pengambilan gambar menggunakan kamera CMOS Color dengan resolusi
NTSC 510 x 492 dan PAL 628 x 582. Keluaran utama yang diharapkan dari
penelitian ini adalah hasil gambar yang direkam kamera gyroscope.
Hasil gambar (Gambar 19) yang dihasilkan disimpan dalam format *bmp.
Kamera juga bisa berfungsi sebagai perekam video. Format keluaran untuk video
adalah *mpg.
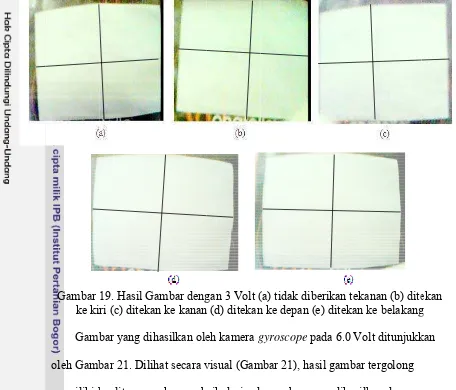
Gambar yang dihasilkan oleh kamera gyroscope dengan diberikan 3.0 Volt
dapat terlihat seperti Gambar 19. Dilihat secara visual, hasil gambar baik, karena
tidak terganggu oleh pergerakan gyroscope. Namun, pergerakan gyroscope pada
3.0 Volt tidak memanfaatkan voltase dengan sempurna. Putaran gyroscope pada
3.0 Volt lebih didominasi oleh gaya gravitasi.
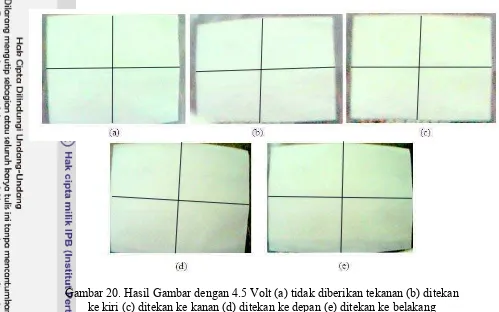
Gambar yang dihasilkan oleh kamera gyroscope pada 4.5 Volt ditunjukkan
oleh Gambar 20. Dilihat secara visual (Gambar 20), hasil gambar tergolong
memiliki kualitas yang baik seperti dengan 3.0 Volt, dikarenakan tidak terganggu
oleh pergerakan gyroscope. Putaran di voltase ini, tidak didominasi oleh gaya
Gambar 20. Hasil Gambar dengan 4.5 Volt (a) tidak diberikan tekanan (b) ditekan ke kiri (c) ditekan ke kanan (d) ditekan ke depan (e) ditekan ke belakang
44
5. KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kamera gyroscope telah dirancang dengan motor gyral memiliki voltase
optimum 4.5 Volt, yang menghasilkan getaran rendah. Untuk menghasilkan kualitas
gambar yang baik dan tidak menggunakan voltase yang tinggi. Permasalahan yang
muncul adalah voltase yang tinggi akan mengakibatkan getaran yang bersifat
mengganggu (noise) pada kamera. Getaran mempengaruhi hasil dari gambar yang
ditangkap oleh kamera, sehingga menjadi tidak fokus (blur). Penggunaan voltase
yang rendah, tidak memberi pengaruh yang berarti terhadap kamera. Hasil tangkapan
kameranya fokus namun tidak mengandalkan voltase. Selain itu, uji gerak gyral
menunjukkan peningkatan waktu menuju stabil lebih lama dikarenakan bertambahnya
kecepatan (dalam Rpm)
Setelah melakukan uji coba dengan tiga perlakuan, yaitu 3 Volt, 4.5 Volt dan 6
Volt. Maka dapat disimpulkan bahwa model dengan 4.5 Volt lebih baik dari
perlakuan lainnya. Untuk menghasilkan gambar yang baik tidak dapat menggunakan
voltase yang tinggi. Permasalahannya, voltase yang tinggi akan meningkatkan
getaran yang bersifat mengganggu (noise) pada kamera. Getaran mempengaruhi hasil
gambar yang ditangkap oleh kamera, sehingga menjadi tidak fokus (blur).
Penggunaan voltase yang rendah, tidak memberi pengaruh yang berarti terhadap
45
5.2 Saran
Penelitian berikutnya, dapat membuat kamera ber-gyral dengan mikrokontroler
agar dapat dikendalikan. Selain itu, agar selalu memiliki nilai gyral yang tinggi tetapi
AZZAHRA KHAIRUNNISA
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN
FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Dengan ini saya menyatakan bahwa Skripsi yang berjudul:
RANCANG BANGUN PROTOTIPE KAMERA GYROSCOPE
adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam daftar pustaka di bagian akhir Skripsi ini.
Bogor, Juli 2012
AZZAHRA KHAIRUNNISA. Rancang Bangun Prototipe Kamera Gyroscope. Dibimbing oleh TOTOK HESTIRIANOTO dan HENRY M MANIK.
Perancangan instrumen kamera gyroscope, menggunakan prinsip fotografi. Proses pengambilan gambar “dilakukan dengan dikontrol“ oleh pengambil gambar tanpa “memerhatikan pergerakan kapal“ yang terombang ambing oleh gelombang. Setelah itu, gambar yang diambil akan direkam oleh kamera dengan bantuan TV turner. Instrumen dilengkapi dengan kamera CCTV. Alat ini bersifat ringkas, mudah dibawa dan digunakan saat penelitian di atas kapal. Tujuan dari penelitian ini adalah merancang instrumen yang dapat digunakan untuk
mengambil gambar dari atas kapal menggunakan gyroscope.
Alat dan bahan yang digunakan untuk membuat kamera gyroscope ini adalah kamera digital CMOSCOLOR dengan resolusi NTSC 510 x 492 dan PAL 628 x 582, wireless receiver rc310a, kepingan besi berdiameter 10 cm dengan ketebalan 0.1 mm, akrilik susu berbentuk lingkaran berdiameter 15 cm dan 18 cm dengan ketebalan 1 cm. Akrilik dibentuk segi empat ketebalan 0.3 mm dan 0.5 mm, kabel hitam dan merah, baut 10 buah dengan ketebalan 0.2 mm, motor dc kecepatan 15.000 rpm, baterai kering 3 volt, 6 volt, dan 9 volt, lem araldite dan superglue, laker 2 buah, laptop zyrex eclipse, tv turner dan solidwork 2010. Perlakuan yang dilakukan adalah memberikan goyangan pada platform sebanyak 10 kali arah roll (depan belakang) yang timbul pada kamera gyroscope.
Pada penelitian ini, gyroscope merupakan perpaduan antara cincin-cincin akrilik, motor penggerak dengan gimbal. Pergerakan gyroscope diatur oleh voltase yang dikeluarkan adaptor. Untuk uji coba penelitian, dilakukan perlakuan beda voltase yaitu 3 Volt, 4.5 Volt, dan 6 Volt. Beda voltase bertujuan untuk mencari voltase yang terbaik untuk pergerakan gyro. Setelah dilakukan berbagai uji, diketahui bahwa perlakuan gyroscope pada 4.5 Volt lebih baik. Semakin tinggi voltase, semakin lama waktu yang diperlukan kembali ke posisi mendatar atau nilai kelembamannya semakin tinggi.
© Hak cipta milik Azzahra Khairunnisa, tahun 2012
Hak cipta dilindungi
Oleh:
AZZAHRA KHAIRUNNISA
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Ilmu Kelautan pada Departemen Ilmu dan Teknologi Kelautan Fakultas Perikanan dan
Ilmu kelautan
SKRIPSI
DEPARTEMEN ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
Judul : RANCANG BANGUN PROTOTIPE KAMERA GYROSCOPE
Nama : Azzahra Khairunnisa
NRP : C54063507
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui Dosen Pembimbing
Utama Anggota
Dr.Ir. Totok Hestirianoto, M.Sc Dr.Ir. Henry M. Manik, M.T NIP. 192620324 198603 1 001 NIP. 19701229 199703 1 008
Mengetahui Ketua Departemen,
Prof. Dr. Ir. Setyo Budi Susilo, M.Sc NIP. 19580909 198303 1 003
Puji syukur kehadirat Allah SWT atas segala limpahan rahmat, hidayah, serta inayah yang diberikan, sehingga penulis dapat menyelesaikan skripsi yang berjudul “ Rancang Bangun Prototipe Kamera Gyroscope ”.
Penulis menyampaikan ucapan terimakasih kepada:
1. Kedua orang tua, H. Muchtar Luthfy dan Hj Nurhayati, S.Pd, beserta seluruh keluarga besar (Nur Afni Octavia, Luthfi, dr. Afrina Yasmina Octavianty, Abdul Malik, S.E, dan Afrizal Lazuardi Ichsan, S.T, M.T ) yang tak henti-hentinya memberi dukungan, doa dan nasihat kepada penulis. 2. Dr. Ir. Totok Hestirianoto, M.Sc dan Dr. Ir. Henry M Manik, M.T selaku dosen pembimbing yang telah memberikan saran dan kritik dalam penyelesaian skripsi ini.
3. Dr. Ir. Richardus Kaswadji selaku Pembimbing Akademik selama penulis menuntut ilmu di Departemen ITK, IPB.
4. Bapak/Ibu dosen, staf penunjang serta staf Tata Usaha Departemen ITK atas ilmu dan bantuan yang telah diberikan selama penulis menyelesaikan studi di IPB.
Louhenapessy, atas bantuan dan semangat yang telah diberikan selama penulis melaksanakan penelitian.
6. Keluarga Besar Indonesia Corruption Watch (ICW), Green TV IPB, dan Majalah TROBOS atas dukungannya sehingga penulis dapat
menyelesaikan perkuliahan di IPB.
7. Seluruh teman-teman seperjuangan ITK 43 dan warga ITK yang tidak dapat disebutkan satu per satu.
Penulis berharap, skripsi ini dapat memberikan kontribusi informasi dan wawasan yang berguna bagi penulis dan pihak yang membacanya.
Bogor, Juli 2012
DAFTAR GAMBAR
13. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Gerakan Bebashingga Kembali Pada Posisi Mendatar ... 22 14. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Ditekan dari Depan hingga Kembali Pada Posisi Mendatar ... 27 15. Grafik Uji Statistik Beda Nilai Tengah di Perlakuan Ditekan dari
20. Hasil Gambar dengan 4.5 Volt (a) tidak diberikan tekanan (b) ditekan ke kiri (c) ditekan ke kanan (d) ditekan ke depan (e) ditekan ke belakang Kembali Pada Posisi Mendatar ... 43 21. Hasil Gambar dengan 6.0 Volt (a) tidak diberikan tekanan (b) ditekan ke
DAFTAR TABEL
Halaman 1. Alat, Bahan dan Spesifikasi ... 11 2. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
Perlakuan Gerakan Bebas Kembali Pada Posisi Mendatar ... 22 3. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
Perlakuan Tekanan dari Depan untuk Kembali Pada Posisi Mendatar ... 26 4. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
Perlakuan Tekanan dari Belakang untuk Kembali Pada Posisi Mendatar 29 5. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
Perlakuan Tekanan dari Kanan untuk Kembali Pada Posisi Mendatar ... 32 6. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
Perlakuan Tekanan dari Kiri untuk Kembali Pada Posisi Mendatar ... 35 7. Uji Anova dan Duncan di Uji Coba Pergerakan Gyroscope untuk
DAFTAR LAMPIRAN
Halaman 1. Hasil dari Uji Coba dengan Perlakuan Sembarang Hingga ke
Posisi Mendatar ... 48 2. Hasil dari Uji Coba dengan Perlakuan Berbagai Perlakuan Hingga ke
Posisi Mendatar ... 49 3. Hasil Pengolahan Data Gyro dengan Perlakuan Kembali Pada Posisi
1.1 Latar Belakang
Teknologi dibidang kelautan mengalami perkembangan yang baik. Para sivitas yang terjun ke dalamnya mulai menggunakan inovasi dan kreativitasnya sesuai dengan kebutuhan di lapangan. Di era digital saat ini, para ilmuwan membutuhkan perekaman gambar mengenai kegiatan di laut untuk menunjang keabsahan dari penelitiannya. Untuk memenuhi kebutuhan tersebut, diperlukan teknologi di bidang fotogrametri yang dapat diaplikasikan di lingkungan laut. Kegiatan di laut terutama saat berada di kapal mengalami banyak gangguan seperti gelombang laut. Keberhasilan pengambilan gambar saat di kapal
memerlukan kamera yang fokus terhadap gangguan pergerakan kapal yang tidak stabil. Kamera tersebut membutuhkan alat penstabil berupa gyroscope. Dengan bantuan alat ini, hasil perekaman gambar akan tetap fokus dan stabil.
Pemanfaatannya di dunia kelautan akan mendukung pengguna terutama para peneliti untuk mengabadikan gambar kondisi lingkungan laut saat pelayaran ataupun kegiatan di atas kapal.
1.2 Tujuan Penelitian
Tujuan dari penelitian ini adalah merancang instrumen yang dapat digunakan untuk mengambil gambar ketika berada di atas kapal menggunakan gyroscope.
2.1 Fotogrametri
Fotogrametri dapat didefisinikan sebagai ilmu untuk memperoleh
pengukuran-pengukuran yang terpercaya dari benda-benda di atas citra fotografik (Avery, 1990). Fotogrametri (Ligterink, 1987) sebagai kegiatan di mana aspek-aspek geometrik dari foto udara seperti sudut, jarak, koordinat dan sebagainya merupakan faktor utama. Interpretasi foto merupakan kegiatan dimana pengamat mempelajarinya dengan bekal pengetahuan dasar tentang titik-titik yang akan diukur.
Pada awalnya, fotogrametri untuk kegiatan menganalisis foto dari hasil suatu pemotretan. Saat ini, fotogrametri diperluas hingga meliputi analisis rekaman lain selain foto seperti, pancaran pola tenaga akustik dan gejala magnetik.
Pengembangan fotogrametri dengan metode akustik, memiliki ruang lingkup yang berbeda, karena cakupan hasil dari pengamatan yang diamati relative lebih sempit dan hanya dapat menggambarkan suatu obyek yang akan diamati. Obyek yang digambarkan akan terlihat jelas dengan hasil foto yang real time, menggambarkan obyek berupa bentuk dan luasan yang dapat dihitung sesuai dengan obyek
sebenarnya (Wolf, 1993).
2.1.1 Fotogrametri Terestrial
dengan alat penyangga lain yang dirancang secara khusus. Istilah “fotogrametri jarak dekat” pada umumnya digunakan untuk foto terrestrial yang mempunyai jarak obyek sampai dengan 300 meter. Orientasi sudut kamera biasanya dapat juga diukur atau diatur pada nilai-nilai tertentu sehingga semua unsur orientasi luar foto terrestrial pada umumnya diketahui dan tidak perlu dihitung.
Foto terrestrial dapat statis (foto obyek tetap) atau dinamis (foto obyek bergerak). Untuk foto statis, dapat digunakan film yang lambat, berbutir halus, dan dengan resolusi tinggi dan gambar dibuat dengan waktu pembukaan lensa lama. Pasangan stereoskopik dapat diperoleh dengan menggunakan kamera tunggal yang melakukan pemotretan pada kedua ujung garis basis. Dalam pengambilan foto terrestrial dinamis, perlu digunakan film cepat dan penutupan lensa dengan kecepatan tinggi. Fotogrametri terestrial menjadi alat yang sangat berguna dikarenakan pengukuran obyek yang sukar dicapai untuk pengukuran langsung dan tanpa menyentuh obyek (Wolf, 1993).
2.1.2 Distorsi
Pada pengambilan gambar, akan mengalami distorsi sebagai perubahan kedudukan suatu gambar pada suatu foto yang mengubah ciri-ciri perspektif gambar. Untuk fotogrametri (Paine, 1992), di antaranya :
1) Distorsi lensa, akan menyebabkan suatu gambar yang tampak lebih dekat atau lebih jauh dari titik dasar daripada kenyataannya.
3) Pergeseran fotografi, berubah langsung dengan jarak radial dari nadir ke obyek.
2.2 Kamera
Kamera dapat dilukiskan sebagai suatu bilik kedap sinar atau kotak di dalam mana sebuah obyek luar diproyeksikan pada film yang peka sinar melalui suatu lubang yang biasanya dilengkapi dengan sebuah lensa, penutup dan sebuah bukaan. Sebuah lensa kamera tersusun atas sekeping gelas atau beberapa keping gelas atau bahan transparan lainnya yang dibuat untuk membentuk sebuah gambar dengan cara pembiasan (Paine, 1992).
Model dan fungsi suatu kamera adalah serupa dengan mata manusia. Masing -masing terdiri dri bilik yang tertutup pada salah satu ujungnya dengan lensa dan film yang peka terhadap cahaya. Fungsinya sebagai retina pada ujung yang lain. Lensa mengumpulkan sinar yang dipantulkan oleh benda tertentu dan
meneruskannya menurut susunan dan ragamnya ke bagian yang peka terhadap cahaya. Suatu penutup kamera dipergunakan untuk mengatur jumlah dan lamanya cahaya yang mencapai film ketika melakukan pemotretan (Avery, 1990).
2.3 CCTV
Closed Circuit Television (CCTV) adalah alat perekam yang menggunakan satu atau lebih kamera video dan menghasilkan data video ataupun audio. Cara kerja kamera CCTV yaitu mengirimkan sinyal secara tertutup lewat melalui wireless ataupun kabel. Di dalam CCTV, terdapat motion detector, yang
detector adalah mendeteksi adanya perubahan pixel. Jika terjadi sebuah gerakan, maka kamera CCTV menganggap nilai piksel nya berubah dan akhirnya merekam perubahan tersebut (Anonymous1, 2012).
Dalam pengoperasian CCTV (Yuliansyah, 2010), dibutuhkan perangkat untuk menjalankannya yaitu: CCTV kamera, merupakan kamera yang diperlukan system CCTV untuk menerima signal video pada lokasi yang ingin dipantau; hard disk, merupakan media penyimpanan data rekaman; digital color quad processor, sebagai penerima signal video dari setiap kamera CCTV dan meneruskan signal output ke monitor; power cable, untuk menghubungkan dengan sumber listrik.
2.4 Gyroscope
Gyroscope merupakan sebuah disk yang dipasang untuk berputar cepat sekitar sumbu dan berputar bebas sekitar satu atau kedua dari dua sumbu tegak lurus satu sama lain dan sumbu spin. Sehingga, rotasi salah satu dari dua sumbu yang saling tegak lurus merupakan hasil dari torsi saat roda berputar
(Anonymous3, 2012).
Gambar 1. Gyroscope
Gyroscope membutuhkan gimbal untuk mengarahkan kembali posisi dan menjaga sumbu putaran rotor dalam arah yang sama. Setiap perubahan
kemiringan sumbu rotasi ditolak oleh gerakan memutar (Anonymous2, 2012). Ketika terdapat kekuatan yang diterapkan untuk gyroscope cenderung untuk mengubah arah dari sumbu rotasi, sumbu akan bergerak dalam arah di sudut kanan ke arah dimana gaya diberikan (Anonymous3, 2012).
Ketika ring berputar, menyebabkan lingkaran itu mengubah sudut, tekanan tidak diterapkan ke depan atau belakang lingkaran seperti yang diinginkan, tetapi melawan arah. Tekanan ini, meskipun diterapkan terhadap sumbu horizontal, tidak menyebabkan lingkaran itu terjatuh, tetapi menyebabkan presesi sumbu vertikal pada sudut kanan ke tekanan yang diberikan, hasilnya akan mengarah ke arah yang baru (Anonymous3, 2012).
2.5 Akrilik
Akrilik (thermoplastic tembus pandang) atau polymethyl methacrylate
Gambar 2. Lempeng akrilik Sumber : Anonymous4, 2012
2.6 Motor
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Pembagian motor diletakkan pada sifat arus yang mengalir. Untuk itu, motor listrik terbagi menjadi dua yaitu motor arus bolak-balik (AC) dan motor arus searah (DC) (Gambar 3).
Gambar 3. Klasifikasi Jenis Utama Motor Listrik Sumber : Anonymous6, 2012
2.6.1 Motor DC
direct-unidirectional. Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah. Motor DC sering digunakan karena keuntungan utama adalah sebagai pengendali
kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Pengendalian motor DC dapat diatur dengan :
1. Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan.
2. Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
2.7 SolidWorks 2010
SolidWorks adalah sebuah program desain yang digunakan untuk merancang bagian dari mesin atau susunan bagian mesin yang berupa assembling dengan tampilan Computer Aided Design (CAD) 3D. Untuk merepresentasikan bagian demi bagian, dapat dibuat dengan tampilan 2D terlebih dahulu untuk
mendapatkan gambar 3D.
SolidWorks dapat membuat berbagai model tergantung keinginan dan kemampuan dari pemakai, tidak hanya terbatas pada model mekanik dan furniture. Untuk menjalankan program dapat menggunakan sistem operasi
Microsoft Windows. SolidWorks diperkenalkan pada tahun 1995 oleh perusahaan SolidWorks Corporation, anak perusahaan dari Dassault Systemes, S. A (Uthami, 2010).
3.1 Waktu dan Lokasi Penelitian
Penelitian ini dilaksanakan pada bulan Agustus 2011 – Juni 2012, di Laboratorium Akustik dan Instrumentasi Kelautan, Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor. Kegiatan penelitian ini terdiri dari tiga bagian, yaitu perakitan instrumen, uji coba alat dan penyempurnaan instrumen. Uji coba instrumen di fokuskan kecepatan gyro untuk kembali ke posisi sumbu utama dengan perlakuan beda voltase, dan perlakuan goyangan pada kamera (di depan, belakang, serta kanan dan kiri).
3.2 Alat dan Bahan
Bahan yang digunakan memiliki daya tahan yang baik terhadap guncangan untuk digunakan pada observasi laut. Untuk mendesain kamera gyroscope menggunakan satu set laptop yang dilengkapi dengan perangkat lunak Google SketchUp 8. Perancangan desain, perakitan instrumen, uji coba, dan
penyempurnaan instrumen dilakukan di Laboratorium Akustik dan Instrumentasi Kelautan Departemen ITK, IPB.
Tabel 1. Alat, Bahan dan Spesifikasi
No Nama Spesifikasi Keterangan
1. Kamera digital CMOS Color dengan resolusi NTSC 510 x 492 dan Pal 628 x 582
Menangkap gambar
2. Wireless receiver RC310a
Untuk mengurangi
perkabelan 3. Kepingan besi diameter 10 cm, dengan
ketebalan 0.1 mm
Komponen gyroscope 4. Akrilik susu berbentuk lingkaran
berdiameter 15 cm dan 18 cm dengan ketebalan 1 cm
Komponen gyroscope
5. Akrilik Dibentuk segi empat ketebalan 0.3 mm dan 0.5 mm
Tempat tumpuan kamera
6. Kabel Hitam dan merah Penghubung antar kamera dengan baterai.
7. Baut 10 buah dengan ketebalan 0.2 mm
Penyambung antar lingkaran akrilik
8. Motor DC kecepatan 15.000 rpm Pemutar keping besi 9. Baterai kering 3 Volt, 6 Volt, dan 9 Volt Sumber energi 10. Lem Araldite dan SuperGlue Sebagai perekat
11. Laker 2 buah Penstabil baut
12. Laptop Zyrex Eclipse Media pengambilan gambar
13. TV Turner Menampilkan tangkapan
gambar oleh kamera ke laptop
14. Helm Media kamera
3.3 Rancangan Instrumen
3.3.1 Pembuatan Kerangka
Rancangan instrumen kamera gyroscope menggunakan prinsip fotogrametri dalam perekaman gambar. Untuk penstabilan dalam pengambilan gambar menggunakan gyroscope. Gyroscope, dirakit terlebih dahulu menggunakan besi berdiameter 10 cm. Di bagian sisi-sisinya akan dibuat lingkaran yang berlubang, yang terbuat dari dua lempeng akrilik susu berdiameter 15 dan 18 cm, dengan ketebalan 1 cm.
Tidak Berhasil
Desain instrumen
Perakitan instrumen
Uji bahan dan kamera terhadap goyangan
Penyempurnaan instrumen
Uji coba instrumen
Prototipe Instrumen Berhasil
Gambar 4. Diagram Alir Pengembangan Purwarupa Kamera gyroscope Tidak Berhasil
Hasil tangkapan gambar oleh kamera akan dikirimkan oleh TV turner yang sudah terhubung oleh wireless. Laptop berfungsi sebagai penerima dan perekam gambar sesuai dengan kebutuhan pengguna.
3.3.2 Uji Coba
Ditujukan untuk melihat kinerja (performance) kamera gyroscope terhadap perilaku roll (gerakan depan belakang) dan kiri kanan dengan menggunakan perlakuan prinsip momen inersia:
ܫ ൌ ݉ ൈ ܴଶൈ ߱
Perlakuan yang dilakukan adalah kegiatan uji, memberikan goyangan pada platform sebanyak 10 kali arah roll (depan belakang) yang timbul pada kamera gyroscope.
3.3.3 Pengambilan Gambar
Pengambilan gambar menggunakan kamera CCTV Color CMOS yang dihubungkan dengan komputer. Perangkat yang berperan sebagai penyambung adalah wireless. Program yang digunakan adalah TV Home. Proses pengambilan gambar dilakukan sesuai dengan Gambar 7.
Gambar 7. Diagram Alir Pengambilan Gambar dengan Komponen Kamera Setting kamera di
program TV Home
Setting voltase di adaptor
Ambil gambar Klik Capture di
program
Gambar atau video tersimpan dalam folder local disk C: