PERBANDINGAN KARAKTERISTIK PHOTODIODA DAN LDR SEBAGAI SENSOR PENDETEKSI POSISI TITIK API YANG DIIMPLEMENTASIKAN
PADA MOBIL BOEBOT
SKRIPSI
Disusun Untuk Memenuhi Salah Satu Syarat Kelulusan Sarjana Pada Jurusan Teknik Komputer Fakultas Teknik Dan Ilmu Komputer
Universitas Komputer Indonesia Jenjang Strata Satu
Disusun Oleh: Muhammad Budiman
1.02.00.120
DAFTAR ISI
Halaman
LEMBAR JUDUL
LEMBAR PENGESAHAN ………..
ii
KATA PENGANTAR ………...
iii
ABSTRAK ……….
v
ABSTRACT………
vi
DAFTAR ISI ……….
vii
DAFTAR TABEL ……….
x
DAFTAR GAMBAR ………
xi
DAFTAR LAMPIRAN ………
xiii
BAB I
PENDAHULUAN
1.1 Latar Belakang ………..
1
1.2
Maksud dan tujuan ………
1
1.3
Metodologi Penelitian ………
2
1.4
Batasan Masalah ………...
2
1.5
Sistematika Penulisan Laporan Tugas Akhir ………….
3
BAB II
LANDASAN TEORI
2.1 Rangkaian Pembagi Tegangan ………
5
2.2
Photodioda ……….
5
2.3
LDR (Light Dependent Resistor) ………
6
2.4
ADC (Analog to Digital Converter) ………
7
2.4.1 ADC 0831 ………...
7
2.5
Mikrokontroler BS2 …….………...
8
2.5.1 Konfigurasi Pin BS2 ……….
9
BAB III PERANCANGAN SISTEM
3.1
Modul Sensor ………...
11
3.2
Modul ADC …..………...
12
3.3
Modul Mobil BoeBot ….………..
14
3.4
Gabungan Seluruh Modul ...
16
BAB IV UJI COBA ALAT DAN ANALISA HASIL
4.1
Uji Coba Alat
4.1.1
Data Hasil Pengukuran Vout Photodioda
Dengan kondisi ruangan gelap ………..
19
4.1.2
Data Hasil Pengukuran Vout Photodioda
dengan noise lampu 16 W ………..
19
4.1.3
Data Hasil Pengukuran Vout Photodioda
dengan noise lampu 20 W ………..
20
4.1.4
Data Hasil Pengukuran Vout Photodioda
dengan noise sinar matahari …….………..
20
4.2
Analisa Alat
4.2.1
Grafik hasil pengukuran Vout Photodioda
dengan kondisi ruangan gelap ………..
21
4.2.2
Grafik hasil pengukuran Vout Photodioda
dengan noise lampu 16 W ………..
22
4.2.3
Grafik hasil pengukuran Vout Photodioda
dengan noise lampu 20 W ………..
23
4.2.4
Grafik hasil pengukuran Vout Photodioda
dengan noise sinar matahari ..………..
24
[image:3.612.108.491.78.737.2]4.3.4
Grafik hasil Pengukuran Vout Photodioda dan
LDR dengan noise sinar matahari ……….
33
BAB V KESIMPULAN DAN SARAN
5.1
Kesimpulan ……….
35
5.2
Saran ………
35
DAFTAR TABEL
Tabel 4.1 Data hasil pengukuran Tegangan Keluaran Photodioda
dengan Kondisi ruangan gelap ……….
19
Tabel 4.2 Data hasil pengukuran Tegangan Keluaran Photodioda
dengan Kondisi ruangan diberi sinar lampu tabung 16 W …………
19
Tabel 4.3 Data hasil pengukuran Tegangan Keluaran Photodioda
dengan Kondisi ruangan diberi sinar lampu tabung 20 W …………
20
Tabel 4.4 Data hasil pengukuran Tegangan Keluaran Photodioda
DAFTAR GAMBAR
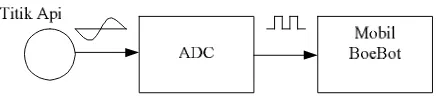
Gambar 2.1
Blok diagram sistem ………
4
Gambar 2.2
Rangkaian pembagi tegangan ………..
5
Gambar 2.3
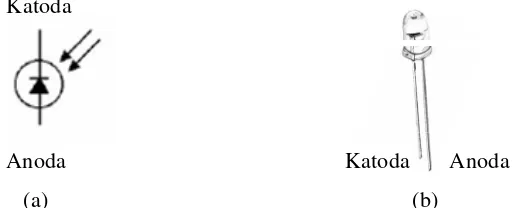
Simbol dan Bentuk Fisik Photodioda ………..
6
Gambar 2.4
Simbol dan Bentuk Fisik LDR ………
6
Gambar 2.5
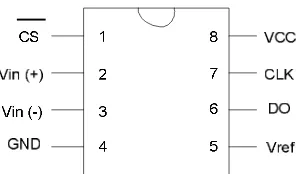
Konfigurasi kaki ADC 0831 ………..
7
Gambar 2.6
Bentuk Fisik Mikrokontroller BS2 ……….
8
Gambar 2.7
Bentuk Fisik Motor Servo ………..
10
Gambar 3.1
Blok diagram sistem keseluruhan modul ………
11
Gambar 3.2
Rangkaian Sensor Photodioda ………
11
Gambar 3.3
Corong dan Negative film yang digunakan ………
12
Gambar 3.4
Rangkaian Modul ADC ……….
13
Gambar 3.5
Bentuk Fisik Mobil BoeBot dan Mikrokontroller BS2 …….
14
Gambar 3.6
Tampilan layer menu bahasa pemrograman Basic Stamp ….
15
Gambar 3.7
Rangkaian seluruh sistem ………..
17
Gambar 4.1
Grafik Karakteristik Photodioda pada jarak terhadap Vout
didalam ruangan tanpa noise ...
21
Gambar 4.2
Sudut pendeteksian nilai intensitas cahaya api dari Photodioda
pada ruangan tanpa noise ………..
22
Gambar 4.3
Grafik Karakteristik Photodioda pada jarak terhadap Vout
didalam ruangan dengan noise lampu tabung 16 W ...
22
Gambar 4.4
Sudut pendeteksian nilai intensitas cahaya api dari Photodioda
pada ruangan dengan noise lampu tabung 16 W ……….
23
Gambar 4.5
Grafik Karakteristik Photodioda pada jarak terhadap Vout
didalam ruangan dengan noise lampu tabung 20 W ...
23
Gambar 4.6
Sudut pendeteksian nilai intensitas cahaya api dari Photodioda
pada ruangan dengan noise lampu tabung 20 W ………..
24
Gambar 4.8
Perbandingan Karakteristik Photodioda dan LDR pada jarak
terhadap Vout didalam ruangan tanpa noise ...
25
Gambar 4.9
Perbandingan sudut pendeteksian intensitas cahaya api dari
LDR dan Photodioda pada ruangan tanpa noise ...
26
Gambar 4.10 Perbandingan Karakteristik Photodioda dan LDR pada jarak
terhadap Vout didalam ruangan dengan noise lampu neon 15 W
dan lampu tabung 16 W ...
26
Gambar 4.11 Perbandingan sudut pendeteksian intensitas cahaya api dari
LDR dan Photodioda pada ruangan dengan noise lampu neon
15 W dan lampu tabung 16 W ...
29
Gambar 4.12 Perbandingan Karakteristik Photodioda dan LDR pada jarak
terhadap Vout didalam ruangan dengan noise lampu neon 25 W
dan lampu tabung 20 W ...
30
Gambar 4.13 Perbandingan sudut pendeteksian intensitas cahaya api dari
LDR dan Photodioda pada ruangan dengan noise lampu neon
25 W dan lampu tabung 20 W ... 31
Gambar 4.14 Perbandingan Karakteristik Photodioda dan LDR pada jarak
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi dewasa ini kian pesat. Ini terbukti dengan adanya berbagai terobosan-terobosan teknologi yang semakin hari semakin bertambah, baik itu pengembangan dari teknologi yang pernah ada, ataupun suatu terobosan teknologi baru. Salah satunya pengembangan teknologi robotika, robot – robot yang ada saat ini sudah sangat modern, diantaranya adalah robot pencari titik api.
Robot ini menggunakan sensor untuk mendeteksi api, sensor yang sering digunakan adalah UV Tron. Selain UV Tron, LDR juga dapat digunakan sebagai sensor untuk mendeteksi api, komponen LDR harganya sangat murah, akan tetapi LDR sangat mudah terpengaruh oleh cahaya lain ( selain cahaya api ), karena LDR tidak dapat membedakan jenis sumber cahaya.[6]. Oleh karena itu, dalam penelitian Tugas Akhir ini komponen LDR diganti dengan Photodioda sebagai sensor untuk mendeteksi posisi titik api.
Berdasarkan latar belakang kasus diatas, maka judul pada Tugas Akhir ini yaitu “Perbandingan Karakteristik Photodioda Dan LDR Sebagai Sensor Pendeteksi Posisi Titik Api Yang Diimplementasikan Pada Mobil BoeBot”. Perancangan alat pendeteksi titik api ini merupakan suatu rancangan sistem yang diharapkan dapat mencegah terjadinya musibah kebakaran dalam skala besar.
1.2 Maksud dan Tujuan
Maksud dari penelitian ini adalah untuk mendeteksi keberadaan titik api dalam ruangan yang ada gangguan berupa cahaya lampu TL atau lampu pijar.
Tujuan dari penelitian tentang Photodioda ini adalah sebagai berikut :
1. Untuk mengetahui apakah Photodioda dapat digunakan sebagai sensor pendeteksi posisi titik api dari lilin.
1.3 Metodologi Penelitian
Dalam penulisan laporan Tugas Akhir ini menggunakan metode penulisan Eksperimental, dimana materi yang dipaparkan menyangkut masalah-masalah yang terdapat dalam pembatasan masalah.
Adapun metodologi yang dilakukan dalam penelitian tentang Photodioda sebagai Sensor Pendeteksi Titik Api adalah sebagai berikut :
1. Studi Kepustakaan
Dalam penelitian ini teori yang dicari adalah Teori - teori dasar untuk Photodioda, LDR, dan Rangkaian Pembagi Tegangan. Dengan adanya teori-teori dasar tersebut rangkaian dapat dianalisa secara teoritis.
2. Eksperimen
Dalam penelitian ini, eksperimen yang dilakukan adalah menguji coba Rangkaian Pembagi Tegangan untuk Photodioda sebagai sensor Pendeteksi Titik Api dari lilin dengan beberapa kondisi ruangan ( ruangan tanpa noise atau gelap, ruangan dengan noise lampu, dan ruangan dengan noise sinar matahari )
1.4 Batasan Masalah
Pembatasan masalah dilakukan agar penelitian dapat dilakukan secara terarah dan tercapai sesuai tujuan yang diharapkan. Pada penulisan laporan Tugas Akhir ini, penelitian dibatasi pada beberapa permasalahan sebagai berikut :
1. Sensor ditempatkan di dalam ruangan supaya tidak terkena cahaya matahari secara langsung.
2. Lampu TL 16 sampai 20 Watt digunakan sebagai gangguan (noise) yang berada di tengah – tengah ruangan.
3. Sensor menggunakan corong dan negatif film (Klise).
4. Dinding ruangan mempunyai warna sama yaitu berwarna putih. 5. Sumber api berasal dari lilin dengan tinggi maksimal 15 cm.
1.5 Sistematika Penulisan
Secara sistematis penulisan laporan Tugas Akhir ini terbagi dalam beberapa bab dengan pokok-pokok permasalahan. Sistematika penulisan laporan secara umum adalah sebagai berikut :
BAB I : PENDAHULUAN
Bab I ini berisi penjelasan mengenai latar belakang masalah, maksud dan tujuan, metodologi, batasan masalah dan sistematika penulisan.
BAB II : LANDASAN TEORI
Bab II ini menguraikan tentang teori-teori yang akan menunjang penelitian Photodioda sebagai Sensor Pendeteksi Posisi Titik Api berdasarkan perancangan yang dilakukan, diantaranya adalah teori tentang Photodioda, LDR, Rangkaian Pembagi Tegangan, ADC, Mikrokontroller, dan Motor Servo.
BAB III : PERANCANGAN SISTEM
Bab III ini menguraikan tentang proses perancangan sistem. Perancangan berdasarkan teori-teori rangkaian dan komponen. Perancangan yang terdapat dalam bab ini adalah perancangan sensor dan perancangan Mobil BoeBot.
BAB IV : ANALISA DAN UJI COBA ALAT
Bab IV ini menguraikan tentang proses penganalisaan kinerja sistem yang telah dibuat sehingga kita dapat mengetahui kelebihan dan kekurangan dari sistem tersebut. Pada bab ini tabel dan grafik hasil pengukuran yang akan di analisa.
BAB V : KESIMPULAN DAN SARAN
BAB II LANDASAN TEORI
Bab ini membahas tentang teori atau hukum rangkaian elektronika dan teori komponen – komponen yang digunakan sebagai alat bantu atau penunjang pada proses analisa Photodioda. Pembahasan meliputi
1. Rangkaian Pembagi Tegangan 2. Photodioda
3. LDR (light Dependent Resistor) 4. ADC
5. Mikrokontroller 6. Motor Servo
Pembahasan teori komponen hanya difokuskan pada Photodioda, LDR dan ADC, sedangkan teori komponen yang digunakan untuk modul Mobil BoeBot hanya dibahas sekilas karena pembahasan modul Mobil BoeBot bukan merupakan pokok pembahasan didalam Tugas Akhir ini, sesuai dengan judul Tugas Akhir yaitu “Perbandingan Karakteristik Photodioda Dan LDR Sebagai Sensor Pendeteksi Posisi Titik Api Yang Diimplementasikan Pada Mobil BoeBot ”.
[image:11.612.216.435.557.605.2]2.1. Rangkaian Pembagi Tegangan
[image:12.612.262.377.166.266.2]Rangkaian pembagi tegangan terdiri dari dua resistor yang dirangkai secara seri dan dihubungkan dengan suatu sumber tegangan. Tegangan output diambil dari titik tengah rangkaian seri kedua resistor tersebut seperti ditunjukan oleh gambar 2.2.
Gambar 2.2Rangkaian pembagi tegangan.
Keterangan gambar 2.2: RA = Resistor pertama RB = Resistor kedua V = Sumber tegangan DC Vout = Tegangan keluaran
Persamaannya adalah: CC A B B Out V R R R V
……… (2)
Dari persamaan (2), apabila nilai Vcc tetap, maka perubahan nilai Vout hanya bergantung pada perubahan nilai RA atauRB.
2.2. Photodioda
Photodioda merupakan salah satu jenis dioda yang mempunyai fungsi khusus, yaitu sebagai komponen Optoelektronik. Optoelektronik adalah teknologi yang mengkombinasikan optik dan elektronik. [2].
datang menghasilkan elektron bebas dan lubang. Semakin kuat cahaya, maka semakin besar jumlah pembawa minoritas dan semakin besar arus balik. Panah yang mengarah ke dalam melambangkan cahaya yang datang. [1].
Katoda
Anoda Katoda Anoda
(a) (b)
Gambar 2.3 (a) Simbol dari Photodioda (b) Bentuk fisik dari Photodioda
Dari gambar 2.3 (b) menunjukkan bahwa kaki yang paling pendek adalah kaki katoda atau kaki negatif., sedangkan kaki yang panjang adalah kaki anoda atau kaki positif.
2.3 LDR (Light Dependent Resistor)
LDR adalah salah satu jenis variable resistoryang nilai tahanannya bergantung pada intensitas cahaya yang mengenai permukaannya. Makin kuat intensitas cahaya maka makin kecil nilai tahanannya dan makin lemah intensitas cahaya maka makin besar nilai tahanannya.[1]. LDR dibuat dari Cadmium Sulphide (CdS). Gambar 2.4 menunjukan simbol dan bentuk fisik LDR.
(a) (b)
Gambar 2.4 (a) Simbol LDR (b) Bentuk fisik LDR.
[image:13.612.184.440.129.233.2]RLDRmin (Tahanan LDR minimal/terkecil) adalah nilai tahanan LDR pada kondisi permukaan LDR terkena cahaya, dan apabila intensitas cahaya tersebut diperbesar, nilai tahanan LDR tidak berubah.
RLDRmax (Tahanan LDR maksimal/terbesar) adalah nilai tahanan LDR pada kondisi permukaan LDR terkena cahaya, dan apabila intensitas cahaya tersebut diperkecil, nilai tahanan LDR tidak berubah.
2.4. ADC (Analog to Digital Converter)
ADC merupakan komponen yang menpunyai fungsi sebagai pengubah sinyal analog menjadi sinyal digital. Hal yang paling penting dalam suatu rangkaian ADC adalah resolusi, yaitu besaran analog terkecil yang masih dapat dikonversi menjadi satuan digital, persamaannya :
Resolusi (r) = n.Vref 2
[image:14.612.245.395.571.658.2]1
...(3)
Dimana ; n adalah banyaknya bit ADC dan Vref adalah tegangan referensi yang digunakan.
Data-data digital yang dihasilkan ADC hanyalah merupakan pendekatan proporsional terhadap masukan analog. Hal ini karena tidak mungkin melakukan konversi secara sempurna berkaitan dengan kenyataan bahwa informasi digital berubah dalam step-step, sedangkan analog berubahnya secara kontinyu.
2.4.1. ADC 0831
ADC 0831 adalah rangkaian pengkonversi Analog to Digital 8-bit, ADC 0831 memiliki satu input analog dan satu output analog serial dan mempunyai resolusi 8 bit, waktu yang dibutuhkan untuk pengkonversian 32s. [5].
Proses konversi ADC0831 adalah sebagai berikut : 1. Set kaki CS dalam kondisi High(ADC tidak aktif) 2. Beri sinyal lowpada kaki CS (ADC aktif)
3. Proses konversi dimulai pada saat kondisi kaki CS lowdan selesai pada saat kondisi kaki CS High
4. Hasil data yang sudah dikonversi akan dikirimkan melalui kaki DO
2.5. Mikrokontroller Basic Stamp2 (BS2)
Mikrokontroller yang digunakan adalah Basic Stamp2 (BS2). Mikrokontroller ini adalah produk dari Parallax,Inc. Bahasa Basic Stamp menggunakan bahasa program basic. Disebut “stamp” karena ukurannya seperti ukuran perangko. [4].
[image:15.612.266.406.350.502.2]BS2 terdiri dari 24 pin, semua pin tersebut dapat dihubungkan langsung ke board aplikasi yang tersedia atau dapat juga digunakan pada board lain.
Gambar 2.6 Bentuk fisik dari BS2
2.5.1. Konfigurasi Pin BS2
Pin Nama Deskripsi
1 SOUT Serial Out : dihubungkan ke PC serial port RX pin 2 SIN Serial In : dihubungkan ke PC serial port TX pin 3 ATN Attention : dihubungkan ke PC serial port DTR
4 VSS Sistem Ground : (sama seperti pin 23) dihubungkan ke PC serial port Ground pin
5 – 20 P0 - P15 Sebagai I/O pin
21 VDD
5 volt DC I/O : jika tidak diatur tegangannya maka tegangan keluaran dari pin VIN sebesar 5 volt, jika tidak ada tegangan yang dipakai di pin VIN maka tegangan yang ada di pin VDD antara 4.5 sampai 5.5 volt
22 RES Sebagai Reset Input/Output
23 VSS Sistem Ground (sama seperti pin 4) dihubungkan ke ground pada power supply
24 VIN Tegangan yang tak diatur menerima tegangan 5,5 – 15 volt DC. Kemudian akan diatur menjadi 5 volt
2.6 Motor Servo
Servo berasal dari kata latin “servus” yang berarti budak. Servo adalah sebuah sistem kendali otomatis yang dipakai untuk mengatur kecepatan sebuah motor DC. Singkatnya, atur kecepatan dan tinggalkan, kecepatan motor akan konstan sampai kapan pun karena adanya servo ini.
Kecepatan Motor servo di atur oleh besarnya frekwensi yang dikirimkan dari program melalui kabel data pada motor servo.
Bentuk motor servo dapat dilihat pada gambar 2.7. Terdapat tiga utas kabel dengan warna merah, hitam, dan kuning. Kabel merah dan hitam harus dihubungkan dengan sumber tegangan 4-6 volt DC agar motor servo dapat bekerja normal. Sedangkan kabel berwarna kuning adalah kabel data yang dipakai untuk mengatur arah gerak dan posisi servo. [3].
DAFTAR PUSTAKA
1. Malvino, Paul Albert, Alih bahasa M. Barmawi, & M. O. Tjia. 1986. Prinsip-Prinsip Elektronika. 3rd ed. Jakarta : Erlangga.
2. ---, Alih bahasa Joko Santoso. 2003. Prinsip-Prinsip Elektronika. 1ST ed. Jakarta : Salemba Teknika.
3. http://seattlerobotics.org/guide/servo.html 4. http://www.parallaxinc.com/
5. http://www.datasheetarchive.com
6. Rianto, Budi Agus. 2006. “Analisa Kinerja LDR (Light Independent Resistor) Untuk Mendeteksi Ttitik Api Diimplementasikan Pada Mobil Robot Sederhana”. Tugas Akhir S1 Bulan Februari 2006. Universitas Komputer Indonesia