KARYA AKHIR
STUDI PENGUKURAN KECEPATAN PUTARAN
MENGGUNAKAN TACHOMETER DIGITAL
Karya Akhir ini diajukan untuk Melengkapi Salah Satu Persyaratan
untuk Memperoleh Gelar Sarjana Sains Terapan
OLEH:
MUHAMMAD ARSYAD
045203001
PROGRAM DIPLOMA - IV
TEKNOLOGI INSTRUMENTASI PABRIK
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
STUDI PENGUKURAN KECEPATAN PUTARAN
MENGGUNAKAN TACHOMETER DIGITAL
OLEH :
MUHAMMAD ARSYAD
04 5203 001
Disetujui oleh :
Pembimbing Karya Akhir
IR. ZULKARNAEN PANE
NIP . 19570720 198303 1 001
Diketahui oleh :
Program Diploma IV
Teknologi Instrumentasi Pabrik
Fakultas Teknik
Universitas Sumatera Utara
Ketua,
IR. SURYA TARMIZI KASIM, M.Si
NIP . 19540531 198601 1 002
PROGRAM DIPLOMA – IV
TEKNOLOGI INSTRUMENTASI PABRIK
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Bismillaahir rahmaanir rahiim(i)
Assalamu a’laikum Warahmatullahi Wabarokatuh.
Syukur alhamdulillah penulis panjatkan ke hadirat Allah SWT, yang telah
memberikan kesehatan dan kekuatan kepada penulis untuk dapat menyelesaikan
tulisan Karya Akhir ini. Dan tidak lupa juga Selawat dan Salam pada junjungan
Nabi Besar Muhammad SAW yang kita harapkan safa’atnya di akhir kelak, amin.
Penulisan ini merupakan metode pemakaian alat pengukuran kecepatan
putaran dengan berjudul Studi Pengukuran Kecepatan Putaran Menggunakan
Tachometer Digital, yang merupakan salah satu syarat dalam penyelesaian Studi
di Program Diploma IV.
Penulis mengucapkan terima kasih kepada Orang Tua (Saniah), Mertua
(Drs. Junizar Noor, M.Pd dan Novialisa, S.Pd) serta Istri tercinta (Yulis Hati,
S.Kep., Ns) dan Keluarga Besar yang telah memberikan semangat, motivasi dan
dorongan baik material maupun spiritual kepada saya sehingga dapat
menyelesaikan tulisan ini dan juga tidak lupa penulis ucapkan terima kasih,
kepada :
1. Bapak Ir. Surya Tarmizi Kasim, M.Si, Sebagai Ketua Program Studi
Teknologi Instrumentasi Pabrik, yang memberikan kesempatan dan arahan
yang baik selama proses pendidikan hingga penulisan ini,
2. Bapak Rachmat Fauzi, ST., MT, sebagai Sekretaris Program Studi
Tek-nologi Instrumentasi Pabrik yang memberikan kesempatan dan dorongan
3. Bapak Ir. Zulkarnaen Pane, sebagai dosen Pembimbing Karya Akhir yang
memberikan masukan, semangat dan dorongan sehingga penulis lebih
termotivasi dalam penyelesaian tulisan,
4. Bapak-bapak Staf Pegawai Departemen Teknik Elektro yang membantu
proses Administrasi selama pendidikan yang tidak pernah lelah dalam
pengabdiannya.
5. Teman-teman mahasiswa stambuk 04, 05, 06, 07 serta teman-teman
mahasiswa lainnya yang tidak bisa disebut satu persatu namanya, yang
memberikan semangat dan bantuannya selama proses penulisan sehingga
dapat menyelesaikannya.
Disini juga penulis mengharapkan adanya masukan dan saran kepada
penulis terhadap tulisan dari semua pihak yang membaca sehingga menjadi lebih
sempurna dalam penyampaiannya dan semoga tulisan ini dapat bermanfaat bagi
orang banyak hingga menjadi amal ibadah bagi penulis, Amin.
Demikian penulis sampaikan, kepada Allah SWT penulis mohon ampun
dan kepada saudara-saudara mohon di maafkan.
Wassalamu a’laikum Warahmatullahi Wabarokatuh.
Medan, Juni 2011
Penulis,
Muhammad Arsyad
ABSTRAK
Tachometer merupakan alat yang digunakan untuk menghitung kecepatan putaran suatu motor. Dalam hal ini tachometer yang digunakan dibentuk dari beberapa rangkaian elektronik sehingga terbentuk suatu rangkaian lengkap berupa tachometer yang dapat dipergunakan untuk menghitung putaran tersebut, dimana tachometer tersebut di sebut Tachometer Digital.
Adapun rangkaian-rangkaian yang digunakan dalam alat tersebut antara lain, Rangkaian Input, Rangkaian Pintu Utama, Rangkaian Clock, Rangkaian Kontrol dan Rangkaian Counter.
Dimana masing-masing berfungsi sebagai berikut, Rangkaian Input berfungsi sebagai tempat proses pengukuran dilakukan sekaligus pengubahan sinyal analog ke sinyal digital atau persegi (komponen yang digunakan : Sensor, IC LM386, IC SN7413), Rangkaian Pintu Utama berfungsi sebagai penahan dan melewatkan pulsa yang masuk padanya (komponen yang digunakan : IC SN7400), Rangkaian Clock berfungsi untuk membentuk atau membangkitkan pulsa atau sinyal digital yang diinginkan (komponen yang digunakan : IC SN7400, osilator, IC SN7490 dan komponen lainnya)
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... ix
BAB I PENDAHULUAN I.1. Latar Belakang Masalah ... 1
I.2. Tujuan Penulisan ... 2
I.3. Batasan Masalah ... 2
I.4. Sistematika Penulisan ... 2
BAB II TINJAUAN PUSTAKA II.1. Tachometer ... 4
II.2. Teori Elektronika ... 6
II.2.1. Gerbang AND (gerbang pengali) ... 8
II.2.2. Gerbang OR (gerbang penjumlah) ... 9
II.2.3. Gerbang NOT (gerbang pembalik) ... 10
II.2.4. Level (harga) Tegangan ... 11
II.2.5. Operation Amplifier (Op-Amp) ... 12
II.2.6. Rangkaian Flip-Flop ... 13
II.2.6.1. Flip-Flop RS (RESET SET FLIP-FLOP) .. 14
II.2.6.3. Flop D (Data Flop atau Delayed
Flip-Flop) ... 17
II.2.6.4. Flip-Flop JK ... 19
II.2.7. Komponen-komponen Pendukung ... 20
II.2.7.1. Resistor (tahanan) ... 20
II.2.7.2. Kapasitor ... 23
II.2.7.2.1. Elektrolytic Capasitor ... 24
II.2.7.2.2. Ceramic Capasitor ... 25
II.2.7.3. Transistor ... 26
II.2.7.4. Seven Segment ... 29
II.3. Sistem Pengukuran ... 31
II.3.1 Sistem Pengukuran IRED Pasif ... 34
II.3.2. Sistem Pengukuran IRED Aktif ... 34
BAB III TACHOMETER DIGITAL III.1. Rangkaian Input ... 35
III.2. Rangkaian Pintu Utama ... 36
III.3. Rangkaian Clock (Pulsa) ... 37
III.4. Rangkaian Kontrol ... 38
III.5. Rangkaian Penghitung (Counter) ... 39
BAB IV PEMBAHASAN IV.1. Cara Kerja Rangkaian Input ... 40
IV.1.1. Sensor ... 40
IV.1.2. Penguat (amplifier) ... 42
IV.2. Cara Kerja Rangkaian Pintu Utama ... 43
IV.3. Cara Kerja Rangkaian Clock ... 44
IV.4. Cara Kerja Rangkaian Kontrol ... 45
IV.5. Cara Kerja Rangkaian Penghitung (counter) ... 46
IV.5.1. Counter Up ... 46
IV.5.2. Counter Down ... 47
IV.6. Cara Kerja Rangkaian Lengkap Tachometer Digital ... 48
IV.7. Power Supplay ... 49
IV.8. Rangkaian Lengkap Tachometer Digital ... 50
BAB V KESIMPULAN DAN SARAN V.1. Kesimpulan ... 51
V.2. Saran ... 52
DAFTAR PUSTAKA ... 53
DAFTAR GAMBAR
Gambar 2.1. Diagram Blok Tachometer Digital ... 5
Gambar 2.2. Simbol Gerbang AND ... 8
Gambar 2.3. Bentuk Gelombang Gerbang AND ... 8
Gambar 2.4. Simbol Gerbang OR ... 9
Gambar 2.5. Bentuk Gelombang Gerbang OR ... 9
Gambar 2.6. Simbol Gerbang NOT ... 10
Gambar 2.7. Bentuk Gelombang Gerbang NOT ... 10
Gambar 2.8. Harga tegangan IC jenis TTL ... 11
Gambar 2.9. Simbol Op-Amp ... 12
Gambar 2.10. Simbol Flip-flop RS ... 15
Gambar 2.11. Flip-Flop RS menggunakan gerbang NAND ... 15
Gambar 2.12. Simbol logic clocked RS Flip Flop ... 17
Gambar 2.13. Rangkaian Flip-flop RS Terdetak dan ekivalennya ... 17
Gambar 2.14. Diagram Blok Flip-Flop D ... 18
Gambar 2.15. Rangkaian D Flip Flop secara blok ... 18
Gambar 2.16. Resistor Karbon ... 20
Gambar 2.17. Potentiometers ... 22
Gambar 2.18. Perubahan Nilai pada Potensiometer ... 22
Gambar 2.19. Skema Kapasitor ... 24
Gambar 2.20. Electrolytic Capasitor (ELCO) ... 24
Gambar 2.21. Jenis Kapasitor ... 25
Gambar 2.23. Simbol Transistor dari Berbagai Tipe ... 27
Gambar 2.24. Konfigurasi Seven Segmen pada masing-masing common ... 29
Gambar 2.25. Susunan Seven Segmen ... 30
Gambar 2.26. Display Seven Segmen ... 31
Gambar 2.27. Prinsif Dasar Pengukuran ... 32
Gambar 2.28. Blok diagram Sistem Pengukuran Infra Red ... 33
Gambar 2.29. Blok diagram Sistem Pengukuran IRED Passip ... 34
Gambar 2.30. Pengukuran Infra Red Sistem Aktif ... 34
Gambar 3.1. Rangkaian Input ... 35
Gambar 3.2. Rangkaian Input secara Blok ... 36
Gambar 3.3. Rangkaian Pintu Utama ... 36
Gambar 3.4. Rangkaian Clock ... 37
Gambar 3.5. Rangkaian Kontrol ... 38
Gambar 3.6. Rangkaian Penghitung (Counter) ... 39
Gambar 4.1. Rangkaian Input secara Blok ... 40
Gambar 4.2. Pulsa yang akan diukur ... 41
Gambar 4.3. Rangkaian TIL31 ... 41
Gambar 4.4. Rangkaian TIL81 ... 41
Gambar 4.5. Rangkaian Penguat LM386 ... 42
Gambar 4.6. Multivibrator IC SN7413 ... 42
Gambar 4.7. Rangkaian Pembagi Pulsa hingga 0,1 Hz ... 44
DAFTAR TABEL
Tabel 2.1. Tabel Kebenaran Gerbang AND ... 6
Tabel 2.2. Tabel Kebenaran Gerbang OR ... 7
Tabel 2.3. Tabel Kebenaran Gerbang NOT ... 8
Tabel 2.4. Tabel Kebenaran Flip-Flop RS ... 14
Tabel 2.5. Tabel Kebenaran Flip-Flop RS terdetak ... 15
Tabel 2.6. Tabel Kebenaran Flip-Flop D ... 17
Tabel 2.7. Kode Warna Resistor ... 19
Tabel 2.8. Nilai Kapasitor ... 24
Tabel 4.1. Counter Up ... 44
Tabel 4.2. Counter Down ... 45
ABSTRAK
Tachometer merupakan alat yang digunakan untuk menghitung kecepatan putaran suatu motor. Dalam hal ini tachometer yang digunakan dibentuk dari beberapa rangkaian elektronik sehingga terbentuk suatu rangkaian lengkap berupa tachometer yang dapat dipergunakan untuk menghitung putaran tersebut, dimana tachometer tersebut di sebut Tachometer Digital.
Adapun rangkaian-rangkaian yang digunakan dalam alat tersebut antara lain, Rangkaian Input, Rangkaian Pintu Utama, Rangkaian Clock, Rangkaian Kontrol dan Rangkaian Counter.
Dimana masing-masing berfungsi sebagai berikut, Rangkaian Input berfungsi sebagai tempat proses pengukuran dilakukan sekaligus pengubahan sinyal analog ke sinyal digital atau persegi (komponen yang digunakan : Sensor, IC LM386, IC SN7413), Rangkaian Pintu Utama berfungsi sebagai penahan dan melewatkan pulsa yang masuk padanya (komponen yang digunakan : IC SN7400), Rangkaian Clock berfungsi untuk membentuk atau membangkitkan pulsa atau sinyal digital yang diinginkan (komponen yang digunakan : IC SN7400, osilator, IC SN7490 dan komponen lainnya)
BAB I
PENDAHULUAN
1.1.Latar Belakang Masalah
Teknologi elektronika merupakan salah satu cabang teknik termuda,
namun merupakan salah satu cabang yang sangat pesat kemajuannya dan terus
berkembang. Di negara kita, hal perkembangan elektronika belum merata di setiap
lapisan masyarakat, kebanyakan hanya golongan menengah keatas yang kenal
serta bisa mengaplikasikan perkembangan elektronika yang semakin canggih
misalnya saja komputer. Di negara maju hampir semua bidang pengetahuan
dimasuki komputer sehingga masalah tersebut dapat diselesaikan dengan cepat,
tepat dan teliti.
Misalnya jam dinding (analog) atau jam tangan (analog), yang dahulunya
masih menggunakan jarum kini sudah bisa menjadi digital, yang mana manusia
tidak perlu lagi susah-susah membaca jarum jam yang keakuratan
penunjukkannya tergantung pula oleh penglihatan mata manusia.
Keanekaragaman pengetahuan yang berkembang dengan pesat maka
proses pengukuran pun dapat dilakukan dengan metode digital sebagai output dari
pengukuran tersebut, yang berguna untuk lebih memudahkan dalam pengukuran
serta posisi si pembaca dalam membaca hasil pengukuran dan juga untuk
mendapatkan hasil yang lebih baik atau teliti.
Penulis tertarik untuk membahas suatu cara kerja rangkaian dalam hal
menghitung kecepatan putaran pada suatu motor sehingga dapat di ketahui
per minute) yang di singkat dengan RPM, mengunakan Tachometer. Alasan
lainnya penulis menyadari bahwa proses pemahaman cara kerja dalam
pengukuran ini merupakan bagian dari rangkaian elektronik yang kemudian
dikaitkan dengan bidang mata kuliah yang dipelajari selama duduk di perkuliahan
instrument.
Dengan penjelasan yang ada, maka penulis mengambil judul Karya Akhir
yakni, STUDI PENGUKURAN KECEPATAN PUTARAN
MENG-GUNAKAN TACHOMETER DIGITAL.
1.2.Tujuan Penulisan
Adapun tujuan penulisan ini adalah sebagai berikut, antara lain :
1. Untuk mempelajari dasar sistem instrumentasi berdasarkan teknik digital,
2. Untuk memahami konsep dasar pengukuran infra red dan komponen lainnya,
3. Untuk mengetahui karakteristik dan cara kerja sistem intrumentasi
berdasarkan teknik digital (elektronika),
4. dan sebagai bahan belajar dalam hal pemahaman rangkaian tersebut.
1.3.Batasan Masalah
Mengingat masalah yang akan dibahas cukup luas tentang cara kerja
Tachometer Digital ini, maka penulis membatasi permasalahan ini sebagai berikut
1. Menjelaskan komponen-komponen yang digunakan, cara kerja pada
masing-masing blok rangkaian dan cara kerja rangkaian keseluruhan dari Tachometer
2. Serta teori-teori yang menunjang tentang elektronika dan sistem pengukuran,
tetapi tidak secara mendetail melainkan yang dipandang perlu dikemukakan
dan diketahui.
1.4.Sistematika Penulisan
Adapun untuk dapat memudahkan pemahaman, penulis membuat
sistematika penulisan sebagai berikut :
BAB I PENDAHULUAN
Berisikan tentang : Latar Belakang Masalah, Tujuan Penulisan, Batasan Masalah
dan Sistematika Penulisan.
BAB II TINJAUAN PUSTAKA
Berisikan tentang teoritis dari : Tachometer, Teori Elektronika
(Komponen-komponen yang berhubungan dengan sistem pengukuran tersebut) dan Teori
Sistem Pengukuran Infra Red tersebut.
BAB III TACHOMETER DIGITAL
Berisikan tentang : Menjelaskan komponen-komponen yang digunakan pada
masing-masing blok rangkaian Tachometer Digital.
BAB IV PEMBAHASAN
Berisikan tentang : Membahasan fungsi dan cara kerja rangkaian di
masing-masing blok rangkaian (rangkaian input, pintu utama, rangkaian pembangkit
pulsa, rangkaian kontrol dan rangkaian counter ) dan rangkaian power supplay.
Berisikan tentang : Kesimpulan dan saran yang didapat dari hasil penulisan dan
BAB II
TINJAUAN PUSTAKA
Kita mengenal alat untuk mengukur kecepatan putaran motor secara
mekanik yaitu Tachometer. Bila alat ini dipergunakan mengukur besaran putaran
motor atau mobil dipandang sudah cukup teliti, namun untuk keperluan lain
misalnya di dalam laboratorium yang memerlukan ketelitian yang lebih tinggi
maka alat tersebut belum memiliki ketelitian yang lebih dikarenakan pada alat ini
masih dipengaruhi oleh beberapa faktor diantaranya medan magnit, goncangan,
gesekan dan posisi motor terhadap pengaruh grafitasi bumi pada saat pengukuran.
Untuk memperkecil faktor di atas (pengaruh) adalah dengan menggunakan
prinsip Opto Elektronic. Sebab dengan menggunakan prinsip ini pengaruh magnit
dan lainnya dapat ditiadakan. Dimana pada dasarnya prinsip ini di bagi atas dua
dasar kerja, yaitu optik dan elektronic. Bahan optik digunakan untuk
memfokuskan cahaya (sinar), sedangkan untuk mengubah cahaya menjadi sinyal
listrik dan selanjutnya menjadi pulsa sampai pada hasil pengukuran digunakan
prinsip elektronika. Dengan demikian teori yang mendasari pembahasan
tachometer dalam penulisan ini adalah teori elektronika dan sistem pengukuran.
II.1 Tachometer
Tachometer adalah sebuah instrumen atau alat yang mampu untuk
mengukur kecepatan putaran dari poros engkol atau piringan, seperti yang
terdapat pada sebuah motor atau mesin lainnya. Alat ini biasanya menampilkan
Putaran yang dimaksud adalah suatu gerak putar yang dihasilkan oleh
benda atau alat berupa gerakan mekanik yang akan diukur kecepatannya, seperti
putaran roda sepeda motor atau putaran roda gila mesin, motor listrik. Bagi
tachometer putaran ini menjadi masukan untuk diukur.
Jika putaran atau masukan berupa analog (misalnya gerak putar poros)
yang dikopel langsung dengan tachometer, maka tachometer dikenal dengan input
analog. Namun putaran poros dapat dirubah menjadi bentuk digital dengan
memanfaatkan sistem elektronika yang input tidak dikopel langsung, tachometer
ini dikenal dengan input digital.
Dilihat dari hasil pengukuran Tachometer terbagi atas 2 yakni, digital dan
manual (analog). Digital dimana output dari pengukuran tersebut berupa angka
yang di tampilkan dengan menggunakan display atau seven segmen, sedangkan
Manual (analog) output dari hasil pengukuran tersebut berupa penunjukan dengan
jarum alat pengukur yang dapat kita baca pada skala
Gambar 2.1. Diagram Blok Tachometer Digital
Input
Putaran yang diubah menjadi sinyal digital, misalnya motor yang akan
diukur kecepatannya beroprasi maka pada sensor menghasilkan tegangan,
kemudian dikirim ke bagian penguat. Dibagian penguat tegangan (sinyal)
dikuatkan dan diubah menjadi sinyal persegi, meskipun sinyal tersebut berbentuk
sinus atau lain, tetapi masih secara periodik.
Proses
Proses perubahan input menuju output, dimana proses ini merupakan
proses utama dalam pengukuran karena hasil pengukuran yang berbentuk digital
atau pulsa persegi dilakukan suatu pengaturan secara elektronik yang teratur dan
terencana sehingga hasil pengukuran dapat dilihat pada output misalnya pada
seven segment.
Output
Berupa hasil proses yang memiliki nilai dari suatu pengukuran dalam
bentuk perubahan digital sebesar 5 volt yang diindikasi menjadi bernilai 1 (high)
dan lebih kecil dari 1 volt yang diindikasi menjadi bernilai 0 (low), dan ini
dirubah menjadi analog dengan tampilan seven segmen, melalui shift register.
II.2 Teori Elektronika
Elektronika merupakan suatu bidang ilmu dimana di bagi atas elektronika
analog dan digital, sebagai salah satu contoh elektronika digital. Dimana digital
merupakan wahana dari pengembangan kalkulator, komputer, rangkaian terpadu,
dan bilangan biner 0 dan 1. Hal ini merupakan suatu bidang yang menarik di
dalam elektronika karena penggunaan rangkaian digital yang berkembang dengan
pesat. Satu rangkaian terpadu yang kecil melaksanakan fungsi ribuan transistor,
dioda dan resistor.
Pada tahun 1854 George Boole menciptakan logika simbolik yang
sekarang dikenal dengan aljabar boole. Setiap peubah (variabel) dalam aljabar
boole hanya memiliki dua keadaan atau dua harga, yaitu keadaan benar yang
yang memiliki dua keadaan ini semula dimaksudkan untuk menyelesaikan
persoalan-persoalan logika.
Aljabar Boole diwujudkan berupa sebuah piranti atau sistem yang disebut
dengan Gerbang Logika. Gerbang Logika adalah blok bangunan dasar untuk
membentuk rangkaian elektronika digital, sebuah gerbang logika memiliki
beberapa masukan tetapi hanya memiliki satu keluaran. Keluaran akan HIGH (1)
atau LOW (0) tergantung level digital pada terminal masukan. Dengan
menggunakan gerbang-gerbang logika, kita dapat merancang dan mendesain suatu
sistem digital yang akan dikendalikan level masukan digital dan menghasilkan
sebuah tanggapan keluaran tertentu berdasarkan rancangan rangkaian logika itu
sendiri.
Beberapa gerbang logika dasar yang akan dibahas adalah gerbang logika
OR, gerbang logika AND, dan gerbang logika NOT (INVERTER). Sedangkan
gerbang-gerbang logika kombinasional adalah gerbang logika NOT OR (atau
NOR), gerbang logika NOT AND (atau NAND), gerbang logika EXCLUSIVE
OR (atau EXOR), gerbang logika EXCLUSIVE NOT OR (atau EXNOR), dimana
pembahasan tidak mencakup gerbang-gerbang kombinasional tersebut.
Gerbang logika hanya beroperasi pada sistem bilangan biner, oleh karena
itu disebut Gerbang Logika Biner yaitu logika 1 dan logika 0, atau biasa disebut
HIGH dan LOW. Logika 1 (H) menyatakan level tegangan tinggi dan logika 0 (L)
menyatakan tegangan rendah.
Berikut akan dibahas gerbang-gerbang logika yang dipakai dalam teknik
digital, antara lain gerbang logika AND, gerbang logika OR dan gerbang logika
II.2.1. GERBANG AND (gerbang pengali)
Dimana sifatnya salah satu masukan bernilai 1 maka keluaran tetap 0 dan
jika kedua masukkan juga bernilai 0 maka keluaran juga 0 akan tetapi jika kedua
masukan bernilai 1 maka keluaran bernilai 1 atau HIGH.
Sifat lain dari AND adalah mempunyai lebih dari satu masukkan atau
input, tetapi outputnya hanya satu. Hubungan antara input dan output dapat
dinyatakan dengan persamaan berikut :
A . B = Y……….1)
Hubungan-hubungan gerbang AND juga dapat dilihat dari bagian-bagian
di bawah ini berupa gambar, tabel kebenaran dan bentuk gelombang dari gerbang
tersebut.
Gambar 2.2. Simbol Gerbang
AND
Tabel 2.1. TABEL KEBENARAN
INPUT OUTPUT
A B Y
0 0 0
0 1 0
1 0 0
1 1 1
A
B Y
1
1
1 0
0
0
t1 t2 t3 t4 t5 t6 t7 t8
B
Y A
II.2.2. GERBANG OR (gerbang penjumlah)
Gerbang OR biasa juga disebut dengan istilah setiap atau semua. Artinya
bila salah satu atau semua input bernilai 1 atau high maka output bernilai 1 atau
high dan jika kedua input bernilai 0 atau low maka outputnya bernilai 0 atau low.
Simbol gerbang OR dapat dilihat pada gambar di bawah beserta tabel
kebenarannya.
Gambar 2.4. Simbol Gerbang OR
Tabel 2.2. TABEL KEBENARAN
INPUT OUTPUT
A B Y
0 0 0
0 1 1
1 0 1
1 1 1
Hubungan antara input dan output ini dapat dinyatakan dengan persamaan
berikut :
A + B = Y …...… 2)
A
B Y
1
1
1 0
0
0
t1 t2 t3 t4 t5 t6 t7 t8
B
Y A
II.2.3. GERBANG NOT (gerbang pembalik)
Gerbang Not biasa juga disebut inverter atau pembalik, yaitu bila input 1
atau high maka output bernilai 0 atau low serta kebalikannya, atau bila inputnya A
maka outputnya A.
Gerbang Not adalah gerbang yang mempunyai satu input dan satu output,
jadi hanya berfungsi sebagai pembalik pulsa yang masuk padanya. Simbol
gerbang not dapat dilihat pada gambar di bawah beserta tabel kebenarannya.
Gambar 2.6. Simbol Gerbang
NOT
Tabel 2.3. TABEL KEBENARAN
INPUT OUTPUT
A X
0 1
1 0
Dari gambar maupun tabel kebenaran, kita melihat sifat dari gerbang NOT
adalah input dan outputnya selalu berlawanan/berbalikan. Hubungan ini dapat
dinyatakan dengan pernyataan sebagai berikut :
A ≠ X ...…………3)
A X
A = Input
X = Y Output
II.2.4. Level ( harga ) Tegangan
Dalam sistem digital digunakan dua harga tegangan, yaitu harga (level)
high dan level low biasa ditulis H dan L. Untuk harga tinggi biasa disebut logika 1
dan untuk harga rendah disebut logika 0.
Untuk menentukan harga tegangan ini tergantung dari pabrik yang
memproduksi komponen (Integrated Circuit). Jenis yang digunakan dalam
pembahasan ini adalah IC TTL (transistor transistor logic) mempunyai harga
standart sebagai berikut :
Untuk harga tegangan high (H) atau logic 1, mempunyai harga tegangan
dari 2,0 V sampai 5,0 V akan diterjemahkan menjadi sebuah tegangan TINGGI
atau dinyatakan dengan logika 1 dan untuk tegangan low (L) atau logika 0,
mempunyai harga tegangan dari 0 V sampai 0,8 V. Gambar di bawah
memperlihatkan harga tegangan dari IC jenis TTL.
Logika 1
Tak tentu
Logika 0
Gambar 2.8. Harga tegangan IC jenis TTL
Selanjutnya harga tegangan dalam operasi sistem digital 1 dan 0 atau
logikanya misalnya 2,0–5,0 volt dan 0–0,8 volt perlu disesuaikan dari satu
komponen kepada komponen lain dan biasanya disebut dengan interfice device
dari satu rangkaian ke rangkaian lainya, alatnya disebut juga dengan Operational
Amplifier (Op-Amp). VOLT
5,0
2,0
II.2.5. Operational Amplifier ( Op-Amp )
Istilah penguat operasional (operational amplifier) secara umum
meng-gambarkan tentang sebuah rangkaian penguat penting yang membentuk dasar dari
rangkaian-rangkaian penguat audio dan video, penyaring atau tapis, buffer,
penggerak-penggerak saluran, penguat instrumentasi, komparator atau
pem-banding, osilator dan berbagai macam rangkaian analog lainnya.
Penguat Operasional dikenal juga secara umum dengan nama singkat
Op-Amp. Meskipun rangkaian penguat operasional dapat dirancang dari
komponen-komponen diskrit, namun demikian hampir seluruhnya selalu digunakan dalam
bentuk rangkaian terintegrasi (integrated circuit, IC).
Op-amp pada dasarnya merupakan sebuah blok komponen yang
sederhana. Sebuah op-amp akan memiliki dua buah terminal masukan dimana
salah satu masukan disebut sebagai masukan pembalik (diberi tanda -) sementara
satu masukan lainnya disebut dengan masukan non-pembalik (diberi tanda +).
Pada umumnya op-amp memiliki sebuah keluaran atau keluaran tunggal.
Akan tetapi beberapa jenis op-amp khusus yang umumnya digunakan pada
rangkaian-rangkaian frekuensi radio dapat memiliki dua buah terminal keluaran.
Tetapi dalam bahasan ini, hanya op-amp keluaran tunggal yang akan dibahas.
Simbol op-amp di tunjukkan oleh gambar di bawah.
Input op-amp bisa berupa tegangan searah maupun tegangan bolak-balik.
Sedangkan output op-amp tergantung input yang diberikan. Jika input op-amp
diberi tegangan searah dengan input Non Inverting (+) lebih besar dari pada input
inverting (-), maka pada output op-amp akan positip (+). Sebaliknya jika input
Non Inverting (+) lebih kecil dari pada input inverting (-), maka output op-amp
akan negatip ( - ).
Jika input op-amp diberi tegangan bolak-balik dengan input Non
Inverting (+), maka pada output op-amp akan sephasa dengan inputnya tersebut.
Sebaliknya jika input Inverting (-) diberi sinyal/tegangan bolak-balik sinus, maka
pada output op-amp akan berbalik phasa terhadap inputnya.
Dalam kondisi terbuka ( open ) besarnya tegangan output ( Uo ) adalah
Uo = AoL ( Ui1 – Ui2 ) ( 1 – 1 ) ...4 )
dimana :
Uo = Tegangan output
AoL = Penguatan open loop
Ui1 = Tegangan input Non Inverting
Ui2 = Tegangan input Inverting
II.2.6. Rangkaian Flip-Flop
Rangkaian flip-flop adalah suatu elemen logika bi-stabil yang mempunyai
satu atau lebih input dan mempunyai dua output yang saling berlawanan
(complementary), juga rangkaian ini biasa disebut rangkaian Multivibrator
Bi-stabil.
Rangkaian flip-flop juga berfungsi untuk merubah keadaan dari satu posisi
Bilamana flip-flop ini diberi sinyal dari luar atau biasa disebut sinyal trigger, ini
membuat flip-flop berubah keadaannya.
Dalam pemakaiannya rangkaian flip-flop ini digunakan dalam komputer
atau counter yang digunakan sebagai penyimpan data, penghitung biner dan
memindah data (shift register). Dengan demikian flip-flop merupakan dasar dari
pada rangkaian digital. Flip Flop yang merupakan penggabungan rangkaian logika
terdiri dari gerbang AND, OR dan NOT, dapat berupa :
a. Flip-Flop RS
b. Flip-Flop RS yang Berdetak
c. Flip-Flop D
d. Flip-Flop JK
II.2.6.1. Flip-Flop RS (RESET SET FLIP-FLOP)
Flip-flop RS disebut juga Penahan Transparan (Transparent Latches),
karena keluaran flip-flop langsung menyebabkan terjadinya perubahan terhadap
masukannya. Perubahan yang cepat disebabkan karena flip-flop SR langsung
menanggapi perubahan sinyal pada bagian masukan sehingga keluaran Q akan
langsung berubah sejalan dengan perubahan masukan. Keadaan sinyal masukan
akan diingat dengan cara menahan sinyal masukkannya ke dalam rangkaian
logikanya.
Flip-Flop RS mempunyai dua buah input yang diberi nama atau lebel SET
(S) dan RESET (R) dan dua buah output yang diberi nama Q dan Q.
Pada gambar di bawah memperlihatkan simbol Flip-Flop RS yang
memiliki dua buah output yang saling berlawanan, tidak seperti gerbang logika
yang mempunyai satu output. Output Q dinamakan output normal dan yang
satunya merupakan kebalikannya dan ditulis Q yang berarti complement
/berbalikan dengan output normal. Jika Q = 1 maka Q = 0 dan sebaliknya jika Q =
0 maka Q = 1.
Sebuah flip-flop RS yang terbuat dari gerbang logika NAND (NOT AND)
sering disebut sebagai penahan NAND (NAND Lacth. Penahan NAND prinsip
kerjanya sama dengan penahan NOR. Perbedaannya terletak pada keadaan level
atau tingkat logikanya. Masukan-masukan SET dan RESET dari penahan NOR
bekerja dari keadaan 0 (rendah) menjadi 1 (tinggi), sewaktu mengubah keadaan,
sedangkan penahan NAND sebaliknya. Masukan-masukan SET dan RESET dari
penahan NAND bekerja dari keadaan 1 (tinggi) menjadi 0 (rendah), sewaktu
mengubah keadaan. Tetapi sekali lagi, prinsip kerja keduanya sama.
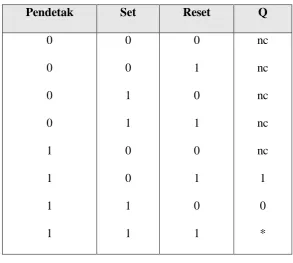
Tabel 2.4. Tabel Kebenaran Flip-Flop RS
Keadaan
Gambar 2.10. Simbol Flip-flop RS Gambar 2.11. Flip-flop RS menggunakan
gerbang NAND
II.2.6.2. Flip-Flop RS Terdetak
Flip-flop RS yang telah kita pelajari tersebut mempunyai penerapan yang
terbatas, karena hanya mempunyai dua masukan yang harus dikendalikan secara
silih berganti. Sebagai contoh penahan NOR, untuk mengaktifkan penahan NOR
masukan SET harus diberi sinyal 1, kemudian Q akan 1. Untuk memadamkan
keluaran Q dari penahan NOR masukan RESET harus diberi sinyal 1, maka
keluaran Q akan 0. Masukan SET dan RESET harus silih berganti. Tidak
diperkenankan bekerja secara sepihak terus-menerus dan juga tidak dapat bekerja
secara bersama-sama atau berada dalam keadaan terlarang atau pacu. Maka
pengoperasian Flip-Flop RS tanpa sinyal pendetak disebut tak serempak atau
asinkron.
Flip-Flop RS tanpa pendetak kemudian dikembangkan menjadi flip-flop
RS dengan ditambah masukan untuk sinyal pendetak (clock), maka disebut
Flip-Flop RS terdetak (Clock SR Flip-Flip-Flop). Flip-flop RS terdetak bekerja dengan
menggunakan sinyal pendetak. Pada hakekatnya prinsip kerja keduanya sama.
Perbedaannya terletak pada operasi pengendalian masukan dan keluarannya.
Flip-flop RS terdetak ini harus menyesuaikan diri dengan sinyal pendetak
atau menyinkronkan diri dengan sinyal pendetak. Apabila sinyal pendetak
masukan pada logika 0, maka data yang masuk pada S dan R tidak akan
ditanggapi atau diproses oleh flip-flop, sehingga keluaran Q tetap tidak berubah.
Jika sinyal pendetak berubah dari logika 0 menjadi 1, seketika itu juga
masukan Set atau Reset akan ditanggapi, sehingga keluaran Q berubah.
Pengoperasian Flip-Flop RS terdetak disebut secara serempak atau sinkron
Tabel 2.5. Tabel Kebenaran Flip-Flop RS terdetak
II.2.6.3. Flip-Flop D (Data Flip-Flop atau Delayed Flip-Flop)
Penahan D yang paling sederhana dapat dibangun dengan menggunakan
gerbang logika yang membentuk ekivalen penahan NAND (lihat Flip-flop RS
pada pembahasan sebelumnya).
Sedangkan prinsip kerja penahan D jenis ini juga tak kalah sederhana.
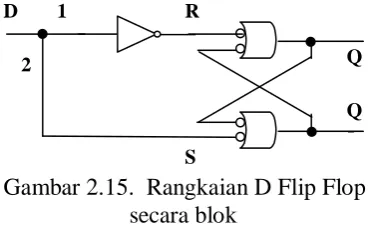
Isyarat-isyarat digital yang masuk pada D akan dibagi menjadi dua jalur. Jalur Gambar 2.12. Simbol logic
clocked RS Flip Flop
pertama (1) melewati gerbang Inverter kemudian melewati gerbang NAND (atau
OR dengan kedua masukan dibalik) yang berada dibagian atas, yaitu RESET.
Sedangkan jalur yang kedua (2) langsung menuju kegerbang NAND (atau
ekivalen OR dengan kedua masukan dibalik) yang dibagian bawah, yaitu SET.
Jika masukan D adalah 0 (atau low atau rendah) maka gerbang NAND
yang di atas (atau RESET) akan 0 dan gerbang logika NAND yang di bawah (atau
SET) akan 1, maka keluaran Q akan 0. Flip-Flop dalam keadaan RESET.
Tetapi jika masukan 1 (high = tinggi) maka gerbang logika NAND yang
atas (RESET) akan 1 dan gerbang logika yang bawah (SET) akan 0, maka
keluaran Q akan 1. Flip-Flop dalam keadaan SET.
Dalam penahan D tersebut tidak mungkin ada lagi keadaann yang terpacu.
Gerbang logika tersebut berfungsi untuk menjamin supaya masukan S dan
masukan R berada pada keadaan yanng berlawanan, sehingga dipastikan tidak
akan terjadi keadaan pacu.
Penahan D ini sama seakali tidak menggunakan sinyal kendali apapun atau
sinyal detak (clock) sekalipun. Rangkaian akan berada pada keadaan SET atau
RESET dengan sendirinya sejalan dengan sinyal yang masuk pada D, yaitu 0 atau
1. jadi jika sinyal masukan 0 maka keluaran Q akan 0 dan sebaliknya jika sinyal
masukan 1 maka keluaran Q juga 1.sehingga penggunaan Flip-Flop ini sendiri
jarang sekali dipakai, baik dalam pemakaian yang umum maupun pada sistem
digital atau komputer praktis.
Gambar 2.14. Diagram Blok Gambar 2.15. Rangkaian D Flip Flop
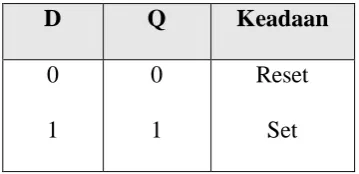
Tabel 2.6. Tabel Kebenaran Flip-Flop D
D Q Keadaan
0
1
0
1
Reset
Set
II.2.6.4. Flip-Flop JK
Dari semua Flip Flop yang dipelajari, masing-masing memiliki sifat dan
kegunaan tertentu, yang kesemuanya memiliki sifat yang sama yakni sebagai
penyimpan data. Disini kita akan menerangkan sedikit tentang Flip-Flop yang
paling penting diantara yang pernah kita bahas sebelumnya, yaitu Flip-Flop JK.
Dari semua Flip-Flop yang ada Flip-Flop JK adalah yang paling ideal digunakan
sebagai piranti penyimpanan (memori).
Flip-Flop JK sangat luas penggunaannya, flip-flop ini dipakai pada setiap
komputer digital maupun piranti-piranti digital lainnya. Dalam pemakaian bidang
elektronika juga sangat banyak manfaatnya, misalnya sebagai Pencacah Frekuensi
(Frequency Counter), pembagi frekuensi (Frequency Divider), pembangkit
ragam-gelombang kotak simetri (Symetry Square Wave-form generator) dan lain-lain.
Flop JK terbagi atas dua jenis, yaitu Flop JK Pemicuan Tepi dan
Flip-Flop JK MS (Master-Slave) atau disebut juga Flip-Flip-Flop JK Majikan–Budak.
Dalam hal ini kita tidak menerangkan secara detail jenis tersebut tetapi kita
akan menjelaskan secara garis besar dari kedua jenis Flip-Flop JK tersebut, antara
lain :
1. Flip-Flop JK Pemicuan Tepi
II.2.7. Komponen-Komponen Pendukung
II.2.7.1. Resistor (tahanan)
Resistor komponen pasif elektronika yang berfungsi untuk membatasi arus
listrik yang mengalir. Berdasarkan kelasnya resistor dibagi menjadi 2 yaitu: Fixed
Resistor dan Variable Resistor dan umumnya terbuat dari carbon film atau metal
film, tetapi tidak menutup kemungkinan untuk dibuat dari material yang lain.
Pada dasarnya semua bahan memiliki sifat resistif namun beberapa bahan
tembaga, perak, emas, dan bahan metal umumnya memiliki resistansi yang sangat
kecil. Bahan–bahan tersebut menghantar arus listrik dengan baik, sehingga
dinamakan konduktor.
a. Fixed Resistor
Resistor merupakan komponen elektronika yang digunakan untuk
membatasi jumlah arus yang mengalir dalam satu rangkaian. Yang disesuai
dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan karbon.
Tipe resistor pada umum berbentuk tabung porselen kecil dengan dua kaki
tembaga. Dimana pada badannya memiliki kode warna, yang mana warna tersebut
merupakan besaran dari resistor tersebut. Nilai besaran komponen ini di ukur
dengan satuan Ohm
Tabel 2.7 Kode Warna Resistor
WARNA
GELANG KE
1 DAN 2 3 4
Hitam 0 x 1 1%
Coklat 1 x 10 2%
Merah 2 x 100 2%
Jingga 3 x 1000 -
Kuning 4 x 10000 -
Hijau 5 x 100000 -
Biru 6 x 1000000 -
Ungu 7 x 10000000 -
Abu-abu 8 x 100000000 -
Putih 9 x 1000000000 -
Emas - x 0.1 5%
Perak - x 0.01 10%
Tidak bewarna - - 20%
Untuk mengetahui besaran atau nilai dari komponen tersebut, kita dapat
melihat tabel di atas, dimana gelang 1 dan 2 merupakan harga pokok atau tetapan,
sedangkan gelang 3 merupakan faktor pengali dan gelang ke 4 merupakan faktor
toleransi.
Dimana untuk mencari gelang pertama dapat dilihat pada gelang yang
lebih ke pinggir dari komponen tersebut atau kita juga bisa berpedoman dengan
memiliki nilai pada gelang 1 dan 2 maka gelang tersebut merupakan gelang ke 4
(gelang faktor toleransi).
b. Variable Resistor
Dimana pada resistor ini memiliki 2 tipe, Pertama dinamakan Variable
Resistor, nilai dari komponen ini dapat diubah-ubah sesuai dengan yang kita
inginkan. Contoh penggunaan, yakni pada pengaturan volume, bass, balance, dll.
Dan kedua adalah Semi-Fixed Resistor, nilai dari resistor ini biasanya hanya
diubah pada kondisi tertentu saja..
Contoh variable resistor, yang sering digunakan dengan cara memutar
sampai 300 derajat putaran, atau lebih di kenal dengan nama Potensiometer.
seperti pada gambar di bawah
.
Gambar 2.17. Potentiometers” atau “Trimmer Potentiometers
Dengan masing-masing bentuk memiliki fungsi, bentuk 1 sebagai
dpotensiometer, bentuk 2 disebut semi fixed resistor dan biasanya terdapat pada
PCB (Printed Circuit Board) dan bentuk 3 digunakan sebagai volume kontrol.
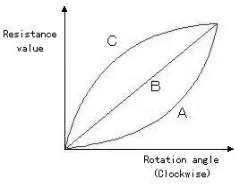
Ketiga tipe tersebut memiliki perubahan nilai pengaturannya, seperti pada gambar.
Pada saat tipe A diputar searah jarum jam, awalnya perubahan nilai
resistansi lambat tetapi ketika putarannya mencapai setengah atau lebih nilai
perubahannya menjadi sangat cepat. Tipe ini sangat cocok dengan karakteristik
telinga manusia. Karena telinga sangat peka ketika membedakan suara dengan
volume yang lemah, tetapi tidak terlalu sensitif untuk membedakan perubahan
suara yang keras. Biasanya tipe A ini juga disebut sebagai Audio Taper
potensiometer. Untuk tipe B perubahan resistansinya adalah linier, cocok
digunakan untuk Aplikasi Balance Control, resistance value adjustment in circuit,
dll. Sedangkan untuk tipe C perubahan resistansinya kebalikan dari tipe A.
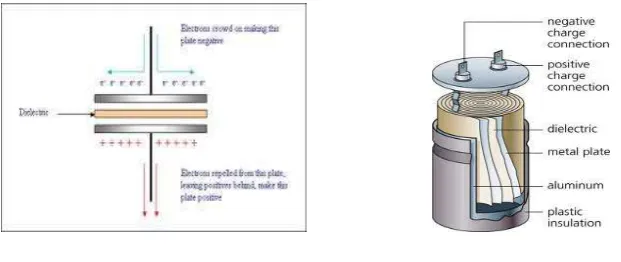
II.2.7.2. Kapasitor (Condensator)
Kapasitor adalah komponen elektronika yang dapat menyimpan muatan
listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan
oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya
udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi
tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu
kaki elektroda metalnya dan pada saat yang sama muatan-muatan negatif
terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir
menuju ujung kutup negatif dan sebaliknya muatan negatif tidak bisa menuju ke
ujung kutup positif karena terpisah oleh bahan elektrik yang non-konduktif.
Muatan elektrik ini tersimpan selama tidak ada konduktif pada ujung-ujung
Gambar 2.19. Skema Kapasitor
Kapasitor merupakan komponen pasif elektronika yang sering dipakai
didalam merancang suatu sistem yang berfungsi untuk mengeblok arus DC, Filter,
dan penyimpan energi listrik. Yang membedakan tiap-tiap kapasitor adalah
dielektriknya. Berikut ini adalah jenis– jenis kapasitor.
II.2.7.2.1. Electrolytic Capacitor (ELCO)
Gambar 2.20. Electrolytic Capacitor (ELCO)
Elektroda dari kapasitor ini terbuat dari alumunium yang menggunakan
membrane oksidasi yang tipis. Karakteristik utama dari Electrolytic Capacitor
adalah perbedaan polaritas pada kedua kakinya. Dari karakteristik tersebut kita
harus berhati-hati di dalam pemasangannya pada rangkaian, jangan sampai
terbalik. Bila polaritasnya terbalik maka akan menjadi rusak bahkan meledak,
II.2.7.2.2. Ceramic Capacitor (Kapasitor Keramik)
Kapasitor ini menggunakan bahan titanium acid barium untuk
dielektriknya. Karena tidak dikonstruksi seperti coil maka komponen ini dapat
digunakan pada rangkaian frekuensi tinggi. Biasanya digunakan untuk
melewatkan sinyal frekuensi tinggi menuju ke ground. Kapasitor ini tidak baik
digunakan untuk rangkaian analog, karena dapat mengubah bentuk sinyal.
Jenis ini tidak mempunyai polaritas dan hanya tersedia dengan nilai
kapasitor yang sangat kecil dibandingkan kapasitor diatas.
Gambar 2.21. Kapasitor jenis ini biasanya terbuat dari bahan kertas, mica,
keramik dll.
Nilai Kapasitor
Untuk mencari nilai dari kapasitor biasanya dilakukan dengan melihat
angka/kode yang tertera pada badan kapasitor tersebut. Untuk kapasitor jenis
elektrolit memang mudah, karena nilai kapasitansinya telah tertera dengan jelas
pada tubuhnya. Sedangkan untuk kapasitor keramik dan beberapa jenis yang lain
nilainya dikodekan. Biasanya kode tersebut terdiri dari 4 digit, dimana 3 digit
pertama merupakan angka dan digit terakhir berupa huruf yang menyatakan
toleransinya. Untuk 3 digit pertama angka yang terakhir berfungsi untuk
Tabel 2.8. Nilai Kapasitor
Misalnya suatu kapasitor pada badannya tertulis kode 474J, berarti nilai
kapasitansinya adalah 47 + 104 = 470.000 pF = 0.47µF sedangkan toleransinya
5%. Yang harus diingat didalam mencari nilai kapasitor adalah satuannya dalam
pF (Pico Farad).
II.2.7.3. Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat,
sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan,
modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam
kran listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya
(FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber
listriknya
.
Pada umumnya, transistor memiliki 3 terminal. Tegangan atau arus yang
terminal lainnya. Transistor adalah komponen yang sangat penting dalam dunia
elektronik modern. Dalam rangkaian analog, transistor digunakan dalam amplifier
(penguat). Rangkaian analog melingkupi pengeras suara, sumber listrik stabil, dan
penguat sinyal radio. Dalam rangkaian-rangkaian
sebagai
sedemikian rupa sehingga berfungsi sebagai logic gate, memori, dan
komponen-komponen lainnya.
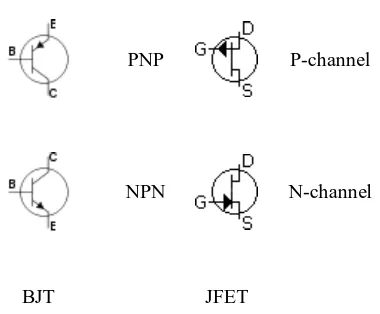
Jenis-jenis Transistor
PNP P-channel
NPN N-channel
BJT JFET
Gambar 2.23. Simbol Transistor dari Berbagai Tipe
Secara umum, transistor dapat dibeda-bedakan berdasarkan banyak
kategori:
• Materi semikonduktor: Germanium, Silikon, Gallium Arsenide
• Kemasan fisik: Through Hole Metal, Through Hole Plastic, Surface
Mount, IC, dan lain-lain
• Tipe:
yaitu
• Maximum kapasitas daya: Low Power, Medium Power, High Power
• Maximum frekwensi kerja: Low, Medium, atau High Frequency, RF
transistor, Microwave, dan lain-lain
• Aplikasi: Amplifier, Saklar, General Purpose, Audio, Tegangan Tinggi,
dan lain-lain
BJT
transistor. Cara kerja BJT dapat dibayangkan sebagai dua dioda yang terminal
positif atau negatifnya berdempet, sehingga ada tiga terminal. Ketiga terminal
tersebut adalah emiter (E), kolektor (C), dan basis (B).
FET
FET dibagi menjadi dua keluarga: Junction FET
Gate FET (IGFET) atau juga dikenal sebagai Metal Oxide Silicon (atau
Semiconductor) FET
JFET membentuk sebuah
Source dan Drain). Secara fungsinya, ini membuat N-channel JFET menjadi
sebuah versi solid-state dari tabung vakum, yang juga membentuk sebuah dioda
antar
depletion mode, keduanya memiliki impedansi input tinggi, dan keduanya
menghantarkan arus listrik dibawah kontrol tegangan input.
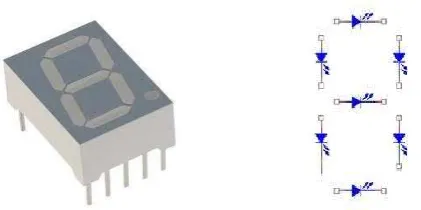
II.2.7.4. Seven Segment
Seven segment (7-segmen) adalah sebuah komponen untuk menampil-kan
bilangan 0 sampai 9 yang banyak digunakan pada aplikasi yang memerlukan
tampilan angka. 7-segments pada dasarnya adalah LED (Light Emitting Diode),
yaitu diode yang dapat mengeluarkan cahaya bila diberi tegangan pada pin-nya.
Gambar 7.1 di bawah ini memperlihatkan gambaran tentang 7-segment yang
masing-masing segment diberi notasi mulai dari a, b, c, d, e, f, dan g.
LED tersebut terdiri dari 7 buah yang dihubungkan satu dengan lainnya.
Cara menghubungkan pin pada seven segments ada 2 (dua) mode, yaitu Common
Anode dan Common Katode. Common Anode adalah LED pada 7 segment semua
pin anode-nya dihubungkan menjadi satu, sedangkan pin katoda dihubungkan ke
port-port pada mikrokontroller atau input dari sistem yang ingin di tampilkan.
Common anode digunakan untuk rangkaian yang memerlukan aktif rendah (active
low). Sedangkan Common katode adalah semua pin katoda pada 7 segments
disatukan, sedangkan pin anoda dihubungkan ke port-port pada mikokontroller
atau input dari sistem yang ingin di tampilkan. Common katoda digunakan pada
rangkaian yang memerlukan aktif tinggi (active high)
Gambar 2.24. Konfigurasi seven segment pada masing-masing common
Seven Segmen ini juga ditambah 1 segmen yang berfungsi sebagai desimal
Gambar 2.25. Susunan Seven Segmen
dimana Segmen yang paling atas disebut segmen a, segmen sebelah kanan atas
disebut segmen b, dan seterusnya sesuai gambar di atas, dp merupakan singkatan
dari desimal point.
Pada seven segment tipe common anoda di atas, untuk menyalakan salah
satu segmen, maka katodanya harus diberi tegangan 0 volt atau logika low.
Misalnya jika segmen a akan dinyalakan, maka katoda pada segmen a harus diberi
tegangan 0 volt atau logika low, dengan demikian maka segmen a akan menyala,
begitu juga untuk segmen lainnya.
Sedangkan tipe common katoda, katoda dari setiap LED dihubungkan
menjadi satu kemudian dihubungkan ke ground dan anoda dari masing-masing
LED berfungsi sebagai input dari seven segmen, seperti ditunjukkan pada gambar
di atas.
Sesuai dengan gambar di atas, maka untuk menyalakan salah satu segmen,
maka anodanya harus diberi tegangan minimal 5 volt atau logika high. Misalnya
jika segmen a akan dinyalakan, maka anoda pada segmen a harus diberi tegangan
minimal 5 volt atau logika high, dimana arus yang akan mengalir dalam LED
kira-kira 20 mA (berlaku hampir untuk semua jenis LED), juga dihubungkan seri
terhadap tahanan sehingga tidak merusak LED pada saat bekerja, dengan
Gambar 2.26. Display Seven Segment
II.3. Sistem Pengukuran
Sistem pengukuran merupakan bagian pertama dalam suatu sistem
pengendalian, jika input sistem pengendalian salah, maka output salah dan jika
hasil pengukuran (input sistem pengendalian) salah, maka hasil pengendalian pasti
salah, walaupun sebenarnya sistem pengendalian sangat baik.
Dilihat dari karakteristiknya instrument pengukuran di bagi atas 2 bagian,
yakni Karakteristik Statis dan Dinamis. Dimana Karakteristik Statis adalah
karakter yang menggambarkan parameter instrument dalam keadaan steady
(Akurasi, Presisi, Toleransi, Range (span), Linieritas, Hysterisis), sedangkan
Karakteristik Dinamis, karakter yang menggambarkan respon (tanggapan)
dinamik (fungsi waktu), dimana hubungan input (nilai sesungguhnya) dan output
(nilai yang ditunjukkan alat ukur) sebagai fungsi waktu dapat dinyatakan dengan
Variabel deviasi = selisih nilai sesungguhnya dengan nilai keadaan steady
Dengan demikian Prinsif Dasar Pengukuran dapat di lihat pada gambar di
bawah :
Gambar 2.27. Prinsif Dasar Pengukuran
dimana,
Transducer atau elemen pendeteksi
Yaitu elemen sistem pengukuran yang berfungsi mengubah satu bentuk informasi
(signal) menjadi bentuk informasi lain. Perubahan bentuk informasi ini
dimaksudkan untuk mendapatkan bentuk informasi yang dapat diukur
Signal Conditioner
Yaitu elemen sistem pengukuran yang berfungsi mengkonversi informasi dari
transducer menjadi bentuk informasi yang dapat ditampilkan (didisplay). Elemen
ini bertugas memperbesar informasi dari transducer agar dapat terbaca pada
display alat pengukuran.
Display
Yaitu elemen sistem pengukuran yang berfungsi mengkonversi signal instrumen
dari satu bentuk menjadi bentuk lain yang didesain untuk memberikan persepsi
bagi pengamat (orang yang melakukan pengukuran).
http://adrian_nur.staff.uns.ac.id/files/2009/10/03-sistem-pengukuran.pdf
Transducer Signal
Conditioner
Display / Recorder
Signal Signal
Kuantitas
Dalam sistem transmitter receiver yang umum adalah sebagai berikut
dalam bentuk blok diagram.
Gambar 2.28. Blok diagram Sistem Pengukuran Infra Red
Unsur-unsur yang ada dalam sistem pengukuran infra red (IRED) adalah :
1. Back Ground (latar belakang)
2. Udara atau lingkungan sekitar
3. Sumber cahaya
4. Sistem optik
5. Detektor
6. Proses sinyal dan penunjukan (display)
Dalam tujuan khusus, komponen-komponen dipilih dan direncanakan
sesuai dengan tujuan pengukuran atau penelitian, dalam daerah panjang
gelombang khusus dan jarak maksimum yang dapat dideteksi.
Pada umumnya sistem pengukuran dengan menggunakan IRED, semua
didasarkan dari bentuk umum, yaitu :
1. Sistem Pengukuran pasif, 2. Sistem pengukuran Aktif.
I R
Sumber
Udara Atmosfir
Proses Signal
& Display Detektor
II.3.1. Sistem Pengukuran IRED Pasif
Sistem pengukuran pasif, yaitu sistem yang hanya mendeteksi radiasi
(pancaran) secara alami, yang dikirimkan oleh sumber, untuk pembahasan ini
rasanya kurang efektif karena putaran yang akan diukur belum tentu berada
dialam terbuka.
Gambar 2.29. Blok diagram sistem pengukuran IRED passip
II.3.2. Sistem Pengukuran IRED Aktif
Sistem pengukuran aktif, digunakan dengan menggunakan sumber-sumber
buatan, untuk menyinari sasaran yang kemudian dipantulkan kembali ke sistem
detektor, seperti diagram berikut.
Gambar 2.30. Pengukuran Infra Red sistem Aktif
I R
Sumber
Proses Signal
& Display Detektor
Sistem Optik Back Ground
Sasaran yang diterangi / diukur
Udara / atmosfer Filter
Sumber I R
Proses Signal
& Display Detektor
BAB III
TACHOMETER DIGITAL
Tachometer merupakan alat yang digunakan untuk mengukur suatu
putaran, sehingga di ketahui nilai dari putaran tersebut. Dalam hal ini tachometer
yang dibahas berupa Tachometer Digital, dimana output dari hasil pengukuran
tersebut berupa angka yang dapat langsung dipahami oleh si pembaca.
Bab ini akan membahas fungsi rangkaian serta komponen yang digunakan
pada masing-masing rangkaian, untuk memudahkan kita memahami cara kerja
rangkaian pada masing-masing blok rangkaian. Dibagi atas 5 (lima) rangkaian
yakni, rangkaian input, rangkaian pintu utama, rangkaian clock/time base,
rangkaian kontrol dan rangkaian penghitung (counter).
3.1. Rangkaian Input
Rangkaian ini merupakan rangkaian awal dari proses pengukuran terhadap
suatu putaran sehingga menghasilkan output yang dapat digunakan oleh rangkaian
lainnya, rangkaian ini terdiri dari beberapa komponen elektronik, seperti pada
gambar di bawah.
Rangkaian input terdiri dari :
1. Sensor (transmitter, receiver dan tahanan).
2. Penguat (Amplifier)
3. Schmitt Trigger
Dalam bentuk blok bagian dapat kita gambar seperti di bawah ini :
Gambar 3.2. Rangkaian Input secara blok
untuk lebih jelasnya akan di bahas pada bab selanjutnya satu per satu rangkaian
tachometer digital.
3.2. Rangkaian Pintu Utama (Main Gate)
Rangkaian pintu utama terdiri dari ¼ IC SN7400, fungsi pintu utama
adalah melewatkan dan menahan pulsa yang masuk kepadanya. Bagian dalam IC
SN7400 adalah Nand gate, ini berarti bila salah satu input nol (0) maka outputnya
akan satu (1). Membuka dan menutupnya Nand Gate diatur oleh time base, yang
mana besarnya diatur sesuai dengan kebutuhan. Output dari pintu utama akan
merupakan input bagi counter yang akan menghitung besarnya pulsa tersebut.
Gambar 3.3. Rangkaian Pintu Utama
Sensor Amplifier Schmitt Trigger
¼ IC SN7400
Pulsa yang akan diukur
3.3. Rangkaian Clock (Rangkaian Pulsa)
Rangkaian ini terdiri dari beberapa IC, Oscilator dan komponen passip,
fungsinya untuk membangkitkan frekuensi 1 MHz stabil. Ini dihasilkan dari IC
SN7400, oscilator, tahanan dan kondensator. IC yang lain yaitu SN7490 berfungsi
sebagai pembagi 10 dan 2, sehingga dihasilkan frekuensi yang diinginkan.
Output dari rangkaian clock ini merupakan salah satu input bagi rangkaian
pintu utama yaitu time base (gating time), selain itu berfungsi sebagai output
rangkaian input bagi rangkaian kontrol.
3.4. Rangkaian Kontrol
Rangkaian terdiri dari 2 (dua) buah IC 74121, tahanan dan kondensator
yang berfungsi untuk memberikan pulsa set dan reset (latch dan strobe) ke
rangkaian counter bagian memori yaitu IC 7475, tujuan dari pada pemberian pulsa
ini agar memori dapat menyimpan sejenak pulsa dan kemudian melepasnya
kembali untuk dihitung besarannya. Dan bersamaan dengan itu IC 7475 siap
kembali menerima pulsa yang baru akan diukur besarnya, pada saat itu juga
display siap memperlihatkan hasil pengukuran.
Gambar 3.5. Rangkaian Kontrol 1
DARI TIME BASE
KE DECODER COUNTER 1
DARI TIME BASE
3.5. Rangkaian Penghitung (Counter)
Rangkaian penghitung (counter) ini merupakan tempat memproses pulsa
yang akan diukur dan sekaligus memperlihatkan hasil pengukuran pada display,
dalam bentuk desimal yang dapat dibaca langsung. Rangkaian ini terdiri dari
beberapa IC yaitu: IC SN7490, SN7475, SN7447 dan seven segmen.
BAB III
TACHOMETER DIGITAL
Tachometer merupakan alat yang digunakan untuk mengukur suatu
putaran, sehingga di ketahui nilai dari putaran tersebut. Dalam hal ini tachometer
yang dibahas berupa Tachometer Digital, dimana output dari hasil pengukuran
tersebut berupa angka yang dapat langsung dipahami oleh si pembaca.
Bab ini akan membahas fungsi rangkaian serta komponen yang digunakan
pada masing-masing rangkaian, untuk memudahkan kita memahami cara kerja
rangkaian pada masing-masing blok rangkaian. Dibagi atas 5 (lima) rangkaian
yakni, rangkaian input, rangkaian pintu utama, rangkaian clock/time base,
rangkaian kontrol dan rangkaian penghitung (counter).
3.1. Rangkaian Input
Rangkaian ini merupakan rangkaian awal dari proses pengukuran terhadap
suatu putaran sehingga menghasilkan output yang dapat digunakan oleh rangkaian
lainnya, rangkaian ini terdiri dari beberapa komponen elektronik, seperti pada
gambar di bawah.
VCC +5 VOLT
Rangkaian input terdiri dari :
1. Sensor (transmitter, receiver dan tahanan).
2. Penguat (Amplifier)
3. Schmitt Trigger
Dalam bentuk blok bagian dapat kita gambar seperti di bawah ini :
Gambar 3.2. Rangkaian Input secara blok
untuk lebih jelasnya akan di bahas pada bab selanjutnya satu per satu rangkaian
tachometer digital.
3.2. Rangkaian Pintu Utama (Main Gate)
Rangkaian pintu utama terdiri dari ¼ IC SN7400, fungsi pintu utama
adalah melewatkan dan menahan pulsa yang masuk kepadanya. Bagian dalam IC
SN7400 adalah Nand gate, ini berarti bila salah satu input nol (0) maka outputnya
akan satu (1). Membuka dan menutupnya Nand Gate diatur oleh time base, yang
mana besarnya diatur sesuai dengan kebutuhan. Output dari pintu utama akan
merupakan input bagi counter yang akan menghitung besarnya pulsa tersebut.
Gambar 3.3. Rangkaian Pintu Utama
Sensor Amplifier Schmitt Trigger
¼ IC SN7400
Pulsa yang akan diukur
3.3. Rangkaian Clock (Rangkaian Pulsa)
Rangkaian ini terdiri dari beberapa IC, Oscilator dan komponen passip,
fungsinya untuk membangkitkan frekuensi 1 MHz stabil. Ini dihasilkan dari IC
SN7400, oscilator, tahanan dan kondensator. IC yang lain yaitu SN7490 berfungsi
sebagai pembagi 10 dan 2, sehingga dihasilkan frekuensi yang diinginkan.
Output dari rangkaian clock ini merupakan salah satu input bagi rangkaian
pintu utama yaitu time base (gating time), selain itu berfungsi sebagai output
rangkaian input bagi rangkaian kontrol.
3.4. Rangkaian Kontrol
Rangkaian terdiri dari 2 (dua) buah IC 74121, tahanan dan kondensator
yang berfungsi untuk memberikan pulsa set dan reset (latch dan strobe) ke
rangkaian counter bagian memori yaitu IC 7475, tujuan dari pada pemberian pulsa
ini agar memori dapat menyimpan sejenak pulsa dan kemudian melepasnya
kembali untuk dihitung besarannya. Dan bersamaan dengan itu IC 7475 siap
kembali menerima pulsa yang baru akan diukur besarnya, pada saat itu juga
display siap memperlihatkan hasil pengukuran.
Gambar 3.5. Rangkaian Kontrol 1
DARI TIME BASE
KE DECODER COUNTER 1
DARI TIME BASE
3.5. Rangkaian Penghitung (Counter)
Rangkaian penghitung (counter) ini merupakan tempat memproses pulsa
yang akan diukur dan sekaligus memperlihatkan hasil pengukuran pada display,
dalam bentuk desimal yang dapat dibaca langsung. Rangkaian ini terdiri dari
beberapa IC yaitu: IC SN7490, SN7475, SN7447 dan seven segmen.
BAB IV
PEMBAHASAN
Pembahasan merupakan bagian yang akan membahas suatu permasalahan
sehingga dapat dipahami maksud dan tujuannya. Pada bab ini akan membahas
sedikit tentang fungsi komponen dan cara kerja pada masing-masing rangkaian
tachometer digital sehingga di proses kerja yang dimaksud. Untuk memudahkan
maksud tersebut, penulis akan membahas satu per satu terlebih dahulu dari
masing-masing rangkaian setelah itu akan membahas cara kerja rangkaian
lengkapnya.
IV.1. Cara Kerja Rangkaian Input
Pada rangkaian input terbagi atas beberapa bagian, diantaranya sensor,
amplifier (penguat) dan schmitt trigger. Seperti terlihat pada blok di bawah.
Gambar 4.1. Rangkaian Input secara blok
IV.1.1. Sensor
Komponen yang digunakan lampu pemancar (transmitter lamp), lampu
penerima (receiver lamp) dan tahanan. Perlu di tambahkan bahwa jika melakukan
pengukuran pada motor atau sesuatu yang akan di ukur kecepatan putarannya
maka pada as/poros dari benda yang diukur dipasangkan plate piringan berbentuk
lingkaran, sehingga memudahkan kita dalam pengukuran tersebut.
Plate piringan berfungsi sebagai saklar untuk membuka dan menutup
cahaya yang masuk ke lampu penerima. Bilamana lampu pemancar, lubang
piringan dan lampu penerima berada pada satu garis lurus maka diperoleh sinyal
pada lampu penerima, tetapi bila terjadi sebaliknya maka tidak ada sinyal yang
dihasilkan. Jika proses berjalan terus menerus, maka akan didapat sinyal yang
akan kita ukur. Seperti pada gambar di bawah,
Gambar 4.2. Pulsa yang akan di ukur
Plate piringan ada baiknya terbuat dari bahan fiber dan tidak terlalu tebal
dengan tujuan agar tidak menambah beban yang lebih terhadap motor atau sesuatu
yang diukur dan tipisnya bahan membuat gesekan terhadap udara dapat diabaikan.
Dimana pilot lamp (tramsmitter) yang digunakan jenis PN Galium
Arsenide Infrared yaitu TIL31 sedangkan receiver lamp diambil phototransistor
jenis TIL81 yang merupakan pasangan yang baik/cocok.
Dengan uraian di atas, berputarnya motor otomatis plate piringan berputar
serempak (bersama). Dimana sensor ( transmitter dan receiver) telah siap dengan
tegangannya 5 volt, maka pengukuran pun telah berlangsung yang kemudian akan
di lanjutkan ke bagian penguat (amplifier).
Rangkaian Sensor jenis PN Galium Arsenide (IRED) TIL31 dan
phototransistor TIL81, terlihat pada gambar di bawah. V
IV.1.2. Penguat (Amplifier)
Amplifier berfungsi sebagai penguat, sebab sinyal yang dihasilkan sensor
masih lemah, artinya belum cukup membuat IC bekerja dengan level yang telah
ditetapkan pabrik yang memproduksi IC tersebut. Sebab dalam rangkaian tersebut
diambil IC jenis TTL, maka level tegangan sesuai dengan yang telah diuraikan
terdahulu pada bab teori.
IC yang digunakan pada rangkaian tersebut adalah LM386 yang
berpenguatan sampai 200 kali, dimana IC tersebut memiliki sinyal keluaran dari
sensor berkisar 1 sampai 1,2 volt, maka diperlukan 2 sampai 4 kali saja.
Gambar 4.5. Rangkaian Penguat LM386
IV.1.3. Rangkaian Schmitt Trigger
Rangkaian ini berfungsi membentuk pulsa persegi, dimana input dapat
berbentuk sinus atau lain, asal secara periodik. Dimana fungsi schmitt trigger
sendiri adalah untuk memperbaiki sinyal atau bentuk sinyal menjadi benar-benar
persegi. Pada prinsipnya bekerja sebagai rangkaian monostabil multivibrator,
yaitu yang mempunyai kedudukan hanya satu yang stabil. 2
8
3
7 6 5
4 1
LM 386
R 10 K OHM
+
-
NC
Vcc + 5 VOLT
Ke Schmitt Trigger
14 13 12 11 10 9 8
1 2 3 4 5 6 7
IV.2. Cara Kerja Rangkaian Pintu Utama (Main Gate)
Pada pintu utama, digunakan IC SN7400 dimana IC ini berfungsi untuk
menahan atau melewatkan pulsa (sinyal) yang akan diukur atau biasa disebut
sebagai swicthing, pengaturan lamanya membuka dan menutup pintu utama
ditentukan oleh time base (gating time), yang mana besarnya tetap.
Sifat Gerbang NAND dimana bila salah satu inputnya low (0), maka
outputnya akan logika high (1). Dimana pintu utama mempunyai dua buah input,
yaitu :
1. Pulsa (sinyal) yang akan diukur besarannya
2. Pulsa yang menentukan membuka dan menutupnya pintu utama, biasa
disebut pulsa clock.
IC ini akan bekerja berdasarkan sinyal (pulsa) yang masuk kepadanya,
dimana pada saat pintu utama menerima kedua sinyal tersebut dia akan membuka
(melewatkan) atau mengeluarkan sinyal ke bagian counter dan pada saat salah
satu sinyal tidak masuk padanya maka tertutup atau sinyal ditahan dan pada saat
ini pula digunakan untuk menghitung pulsa pada counter.
Untuk di ketahui bahwa pulsa (sinyal) yang tidak masuk merupakan sinyal
yang berasal dari rangkaian clock/time base, yang mana waktu tersebut dapat di
atur sesuai dengan yang diinginkan. Pada rangkaian ini waktu yang di buat selama
IV.3. Cara Kerja Rangkaian Clock atau Pembangkit Pulsa
Rangkaian clock atau pembangkit pulsa berfungsi untuk membentuk atau
membangkitkan berbagai jenis pulsa yang diinginkan, dimana pada pembahasan
ini berfungsi sebagai pulsa clock dan pulsa control.
Osilator adalah rangkaian yang digunakan, dimana fungsi osilator itu
sendiri adalah suatu rangkaian yang menghasilkan keluaran yang
berubah-ubah secara periodik dengan waktu. Keluarannya bisa berupa
Jadi pulsa (sinyal) yang dibangkitkan atau dikeluarkan oleh Kristal
Oscillator, IC SN7400 dan komponen-komponen pasif maupun aktif
meng-hasilkan frekuensi output sebesar 1 MHz, sehingga perlu diubah menjadi
frekuensi yang diinginkan, sesuai dengan kebutuhan maka digunakan IC SN7490
yang berfungsi sebagai pembagi sepuluh (10) sehingga menghasilkan frekuensi
yang dapat digunakan.
Dalam hal ini IC tersebut digunakan berulang-ulang kali agar di dapat
frekuensi yang kecil sebesar 0,1 Hz yang berfungsi untuk pulsa ke rangkaian pintu
utama (sebagai time base/pulsa input) dan rangkaian kontrol (latch dan strobe).
Gambar 4.7. Rangkaian Pembagi Pulsa hingga 0,1 Hz
7490 7490
7490 7490 7490 7490 7490
Untuk diketahui rangkaian pembangkit pulsa merupakan jantung dari
rangkaian tachometer ini sehingga perlu dilakukan ketelitian yang baik sehingga
didapat frekuensi yang diinginkan.
IV.4. Cara Kerja Rangkaian Kontrol
Rangkaian ini berfungsi untuk memberikan pulsa set dan reset kepada
rangkaian counter, agar pulsa dapat dibaca pada display selama selang waktu
tertentu dan direset kembali untuk digunakan mengisi kembali rangkaian memori.
Pada saat pulsa (sinyal) yang dikirim rangkaian clock sampai ke rangkaian
kontrol maka IC SN74121 tersebut pun bekerja dengan pengaturan waktu yang
telah ditentukan terlebih dahulu, sehingga pulsa yang di keluarkannya dapat
digunakan untuk keperluan sinyal input ke rangkaian counter.
Waktu kerja yang diperlukan untuk rangkaian ini, dapat digunakan rumus
sebagai berikut :
RC
berdasarkan rumus di atas kita dapat menentukan waktu yang diperlukan,
sesuai dengan batasan yang ditentukan. Dimana nilai C = 220 μf, R Reset = 22 K
Maka waktu tersebut digunakan untuk mengirim sinyal (tegangan) dari rangkaian
kontrol ke rangkaian counter, dimana pengaturan waktu untuk mengontrol proses
perhitungan pada rangkaian counter.
IV.5. Cara Kerja Rangkaian Penghitung (Counter)
Counter berfungsi untuk menghitung pulsa yang masuk ke rangkaian,
dalam hal ini pulsa yang masuk dari rangkaian pintu utama diubah menjadi
tegangan yang kemudian diubah menjadi bentuk desimal yang dapat dilihat pada
display (seven segment).
Dalam counter sendiri dikenal ada dua jenis ditinjau dari sudut cara
kerjanya, yaitu Counter Up dan Counter Down.
IV.5.1. Counter Up
Counter Up merupakan perhitungan naik yang dimulai dari 0 sampai 15
(F), dimana pada counter ini menggunakan 4 buah flip-flop, seperti pada tabel di