TUGAS AKHIR
HUBUNGAN ANTARA BESARNYA TAHANAN TERHADAP WAKTU PENGEREMAN DINAMIK PADA MOTOR DC PENGUATAN KOMPON
PANJANG KOMULATIF
Aplikasi pada Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan
Diajukan untuk memenuhi salah satu syarat dalam
menyelesaikan Pendidikan Sarjana (S-1) pada
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara
Oleh
NIM : 080402110
Luki Itsardi
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Puji dan syukur kepada Allah SWT, yang telah memberikan rahmat dan
karunianya kepada penulis sehingga dapat menyelesaikan Tugas Akhir ini, yang
merupakan persyaratan untuk menyelesaikan studi di Departemen Teknik Elektro
Fakultas Teknik USU. Dalam penulisan Tugas Akhir ini, penulis mengambil
judul :
”HUBUNGAN ANTARA BESARNYA TAHANAN TERHADAP WAKTU PENGEREMAN DINAMIK PADA MOTOR DC PENGUATAN KOMPON
PANJANG KOMULATIF”
(Aplikasi pada Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan)
Penulis menyadari bahwa tulisan ini tidak akan selesai tanpa adanya
bantuan dan dukungan dari berbagai pihak.
Pada kesempatan ini saya ingin menyampaikan ucapan terima kasih
yang tulus dan sebesar-besarnya kepada:
1. Kedua orang tua penulis, Nispiansyah dan Hastuti serta kakak dan
adikpenulis (Winny Iftari dan Nesti Gayatri) yang tidak pernah berhenti
memberi dukungan, semangat dan doanya kepada saya dengan segala
pengorbanan dan kasih sayang yang tidak ternilai besarnya.
2. Bapak Ir. Surya Tarmizi Kasim, M.Siselaku Ketua Departemen Teknik
Elektro Fakultas Teknik USU.
3. Bapak Rachmad Fauzi, ST, MT selaku Sekretaris Departemen Teknik
4. Bapak Ir. Eddy Warman, sebagai Dosen Pembimbing Tugas Akhir
penulis yang sangat besar bantuannya bagi penulis dalam menyelesaikan
Tugas Akhir ini.
5. Bapak Soeharwinto, S.T, M.T,selaku Dosen Wali Penulis yang telah
banyak membimbing dan membantu selama masa kuliah sampai
penyusunan Tugas Akhir ini.
6. Bapak Ir. Ponijan sebagai Kepala Pusat Pengembangan dan Perbedayaan
Pendidik dan Tenaga Kependidikan (P4TK) Medan yang telah memberi
izin riset di Pusat Pengembangan dan Perbedayaan Pendidik dan Tenaga
Kependidikan (P4TK) Medan
7. Bapak Boas Aritonang yang telah membantu penulis untuk
menyelesaikan Pengambilan data di Pusat Pengembangan dan
Perbedayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan.
8. Seluruh staff pengajar dan Pegawai Departemen Teknik Elektro
FT-USU.
9. Seluruh keluarga besar penulis yang berada di Jakarta, Padang, dan
Makassar yang tak pernah berhenti untuk mendukung sayaagar bisa
menyelesaikan Tugas Akhir ini dengan baik.
10.Kepada P.O Brother (Rabbaniy, Zamzami, Anantha, dan Lutfi), serta
terkhusus kepada Wiwid Ayudi yang terus membantu dan memotivasi
saya untuk menyelesaikan tugas akhir ini.
11.Kepada seluruh teman-teman saya di Departemen Teknik Elektro
Stambuk 2007 yang tidak dapat di sebutkan satu persatu.
Penulis menyadari bahwa tulisan ini masih memiliki banyak kekurangan,
oleh karena itu saran dan kritik sangat diperlukan dalam mengembangkan isi dari
Tugas Akhir ini.
Semoga Tugas Akhir ini dapat bermanfaat bagi penulis pribadi dan juga
semua pihak yang membutuhkan.
Medan, Juni 2012
Penulis
ABSTRAK
Motor merupakan alat yang mengubah energi listrik menjadi energi
mekanik. Dalam menjalankan motor arus searah sangat mudah didalam
penggunaannya sehingga masih banyak industri yang menggunakannya walaupun
sangat sulit dalam pemeliharaannya. Untuk kelancaran proses di industri biasanya
motor diatur maju, mundur, diperlambat ataupun diberhentikan.
Dalam penggunaan motor sering dibutuhkan proses untuk menghentikan
putaran motor dengan cepat, hal ini biasa disebut proses pengereman. Ada tiga
metode yang digunakan dalam pengereman pada motor arus searah, yaitu :
pengereman regeneratif, pengereman plugging dan pengereman dinamik. Pada
tugas akhir ini saya akan membahas tentang pengereman dinamik pada motor arus
searah. Pengereman dinamik merupakan pengereman dengan mengubah motor
menjadi generator dengan beban dan tanpa penggerak mula, sehingga sangat
efisien dalam pengereman yang langsung dapat berhenti.
Untuk itu tugas akhir ini akan menunjukkan hasil pengujian tentang
hubungan antara besarnya tahanan pengereman terhadap lamanya waktu hingga
motor berhenti pada motor DC penguatan kompon panjang komulatif. Penelitian
ini dilakukan di Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iv
DAFTAR ISI ... v
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
BAB I PENDAHULUAN I.1 Latar Belakang ... 1
I.2 Tujuan Penulisan ... 2
I.3 Batasan Masalah ... 2
I.4 Metode Penulisan ... 3
I.5Sistematika penulisan ... 3
BAB IIMOTOR ARUS SEARAH II.1Umum... 5
II.2Konstruksi Motor Arus Searah ... 6
II.2.1 Badan Motor ... 7
II.2.2 Kutup ... 8
II.2.3 Inti Jangkar ... 9
II.2.4 Kumparan Jangkar... 10
II.2.5 Kumparan Medan ... 11
II.2.7 Sikat-sikat ... 13
II.3 Prinsip Kerja Motor Arus Searah...14
II.3.1 Torsi Induksi ... 18
II.3.2 Gaya Gerak Listrik (GGL) Lawan ... 22
II.3.2 Reaksi Jangkar... 23
II.3.2.1 Mengatasi Masalah Reaksi Jangkar ... 26
II.4 Jenis-jenis Motor Arus Searah ... 29
II.4.1 Motor Arus searah Penguatan Bebas ... 29
II.4.2 Motor Arus Searah Penguatan sendiri ... 30
BAB III Pengereman Motor Arus searah III.1 Umum ... 35
III.2 Jenis-jenis Pengereman Pada Motor Arus searah ... 38
III.2.1 Pengereman Regeneratif ... 38
III.2.2 Pengereman Plugging ... 40
III.2.3 Pengereman Dinamik ... 41
BAB IV HUBUNGAN ANTARA BESARNYA TAHANAN TERHADAP WAKTU PENGEREMAN DINAMIK PADA MOTOR DC PENGUATAN KOMPON PANJANG KOMULATIF IV.1 Umum ... 46
IV.2 Peralatan Pengujian ... 47
IV.3 Spesifikasi Motor... 48
IV.4..1 Rangkaian pengereman dinamik pada motor dc kompon
panjangkomulatif tanpa beban ... 49
IV.4.2 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif berbeban ... 50
IV.5 Prosedur Percobaan ... 51
IV.5.1 Rangkaian pengereman dinamik pada motor dc kompon panjangkomulatif tanpa beban ... 51
IV.5.2 Rangkaian pengereman dinamik pada motor dc kompon panjangkomulatif berbeban ... 52
IV.6 Data Hasil pengujian ... 53
IV.6.1 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif tanpa beban ... 53
IV.6.2 Rangkaian pengereman dinamik pada motor dc kompon panjangkomulatif berbeban ... 55
IV.7 Analisa Data Pengujian ... 57
IV.7.1 Rangkaian pengereman dinamik pada motor dc kompon panjangkomulatif tanpa beban ... 57
IV.7.2 Rangkaian pengereman dinamik pada motor dc kompon panjangKomulatif berbeban ... 58
IV.8. Grafik Pengujian ... 61
IV. 8. 1. Grafik Pengujian Motor Tanpa Beban Saat di Rem ... 61
BAB V KESIMPULAN DAN SARAN
V.1 Kesimpulan ... 63
V.2Saran ... 64
DAFTAR TABEL
Tabel 4.1 Data pengujian motor tanpa beban saat direm ... 53
Tabel 4.2 Data pengujian motor berbeban saat direm... 55
Tabel 4.3 Hasil Pengujian Pengereman Dinamik Kompon
DAFTAR GAMBAR
Gambar 2.1. Bagan Motor Arus Searah ... 6
Gambar 2.2. Konstruksi motor arus searah ... 7
Gambar 2.3 Konstruksi kutup dan penempatannya ... 8
Gambar 2.4 Inti kutup yang berlapis-lapis ... 10
Gambar 2.5 Kumparan Jangkar... 11
Gambar 2.6 Kumparan Medan ... 11
Gambar 2.7 Komutator... 12
Gambar 2.8 Sikat-sikat ... 13
Gambar 2.9 Pengaruh penempatan konduktor berarus dalam medan magnet ... 14
Gambar 2.10 Prinsip perputaran motor dc ... 15
Gambar 2.11 Ilustrasi daerah distribusi dari ; (a) Fluksi kutup medan, (b) Fluksi jangkar, (c) Resultan dari kedua fluksi. ... 24
Gambar 2.12 Kurva pemagnetan ketika terjadi reaksi jangkar ... 25
Gambar 2.13. Pelemahan ggm akibat pergeseran bidang netral melawan arah putar ... 27
Gambar 2.14. Kumparan mesin dc yang dilengkapi dengan kutup Bantu ... 28
Gambar 2.15 Rangkaian ekivalen motor DC penguatan bebas... 29
Gambar 2.16. Rangkaian ekivalen motor DC penguatan shunt ... 30
Gambar 2.17. Rangkaian ekivalen motor DC penguatan seri ... 31
Panjang Lawan ... 32
(b) Rangkaian Ekivalen Motor DC Kompon Panjang Bantu ... 33
Gambar 2.19. (a) Rangkaian Ekivalen Motor DC Kompon Pendek Lawan ... 34
(b) Rangkaian Ekivalen Motor DC Kompon Pendek Bantu ... 34
Gambar 3.1. Sistem Motor Berbeban ... 37
Gambar 3.2 Pengereman Regeneratif Pada Motor DC ... 38
Gambar 3.3 Pengereman plugging pada motor DC penguatan Shunt ... 40
Gambar 3.4a. Sebelum Pengereman Dinamik ... 41
Gambar 3.4b. Saat Pengereman Dinamik ... 42
Gambar 3.5a. sebelum pengereman dinamik ... 44
Gambar 3.5b. Saat Pengereman Dinamik ... 44
Gambar 4.1 (a) Rangkaian pengereman dinamik motor DC penguatan kompon panjang bantu, (b) rangkaian control ... 49
Gambar 4.2 (a) Rangkaian pengereman dinamik motor DC penguatan kompon panjang bantu, (b) rangkaian kontrol. ... 50
Gambar 4.3. Grafik Pengujian Motor Tanpa Beban Saat di Rem ... 61
ABSTRAK
Motor merupakan alat yang mengubah energi listrik menjadi energi
mekanik. Dalam menjalankan motor arus searah sangat mudah didalam
penggunaannya sehingga masih banyak industri yang menggunakannya walaupun
sangat sulit dalam pemeliharaannya. Untuk kelancaran proses di industri biasanya
motor diatur maju, mundur, diperlambat ataupun diberhentikan.
Dalam penggunaan motor sering dibutuhkan proses untuk menghentikan
putaran motor dengan cepat, hal ini biasa disebut proses pengereman. Ada tiga
metode yang digunakan dalam pengereman pada motor arus searah, yaitu :
pengereman regeneratif, pengereman plugging dan pengereman dinamik. Pada
tugas akhir ini saya akan membahas tentang pengereman dinamik pada motor arus
searah. Pengereman dinamik merupakan pengereman dengan mengubah motor
menjadi generator dengan beban dan tanpa penggerak mula, sehingga sangat
efisien dalam pengereman yang langsung dapat berhenti.
Untuk itu tugas akhir ini akan menunjukkan hasil pengujian tentang
hubungan antara besarnya tahanan pengereman terhadap lamanya waktu hingga
motor berhenti pada motor DC penguatan kompon panjang komulatif. Penelitian
ini dilakukan di Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
BAB I PENDAHULUAN
I.1 Latar Belakang Penulisan
Motor adalah alat yang mengubah energi listrik menjadi energi mekanik.
Salah satu jenis dari motor arus searah adalah motor penguatan bebas yang
mempunyai dua sumber, baik yang di rotor maupun di stator sedangkan motor
penguatan sendiri memilki satu sumber.
Motor arus searah adalah motor yang relatif banyak digunakan dibandingkan
dengan motor-motor lainnya. Motor ini sering dipakai karena bisa melayani
beban yang memiliki torsi start yang besar, jangkauan kontrol yang lebar untuk
pengaturan kecepatan dan torsi yang besar dibandingkan dengan motor induksi
ataupun motor sinkron. Pengereman pada motor kerap kali diperhatikan, karena
bila pengereman tidak baik maka proses industri akan berpengaruh dan
industripun akan rugi.
Pengereman dinamik merupakan pengereman dengan mengubah motor menjadi
generator dengan beban dan tanpa penggerak mula melainkan penggerak mula
yang berasal dari putaran motor awalnya, sehingga sangat efisien dalam
pengereman yang langsung dapat berhenti. Atas dasar inilah penulis tertarik
I.2 Tujuan Penulisan
Tugas Akhir ini bertujuan untuk mengetahui hubungan antara besarnya tahanan
pengereman pada motor penguatan kompon panjang komulatif terhadap lamanya
waktu yang dibutuhkan hingga motor berhenti.
I.3 Batasan Masalah
Untuk menjaga agar pembahasan materi dalam Tugas Akhir ini lebih terarah,
maka penulis menetapkan beberapa batasan masalah sebagai berikut :
1. Motor yang digunakan adalah motor dc kompon panjang komulatif
2. Hubungan besarnya tahanan pengereman terhadap lamanya waktu
pengereman.
3. Motor dianggap dalam keadaan normal (dapat dioperasikan)
4. Rugi-rugi yang diakibatkan oleh gesekan dan angin serta panas
diabaikan sehingga perlambatan yang terjadi dianggap hanya dari
pengereman
I.4 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa
metode studi diantaranya :
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan dengan
topik tugas akhir ini, dari buku-buku referensi baik yang dimiliki oleh
penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal,
2. Studi lapangan yaitu dengan melaksanakan percobaan di Pusat
Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan
(P4TK) Medan
3. Studi bimbingan yaitu dengan melakukan diskusi tentang topik tugas
akhir ini dengan dosen pembimbing yang telah ditunjuk oleh pihak
departemen Teknik Elektro USU, pegawai di Pusat Pengembangan dan
Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan dan
teman-teman sesama mahasiswa
I.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut :
BAB IPENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah,
tujuan dan manfaat penulisan, batasan masalah, metode penulisan, dan sistematika
penulisan.
BAB IIMOTOR ARUS SEARAH
Bab ini membahas mengenai motor arus searah secara umum, konstruksi
motor aru searah, prinsip kerja motor arus searah, jenis-jenis motor arus searah.
BAB III JENIS-JENIS PENGEREMAN MOTOR ARUS SEARAH
Bab ini membahas mengenai pengereman motor arus searah secara umum,
dan jenis- jenis pengereman motor arus searah.
WAKTUPENGEREMAN DINAMIK PADA MOTOR DC
PENGUATAN KOMPON PANJANGKOMULATIF
Bab ini membahas hubungan antara besarnya tahanan pengereman pada motor
penguatan kompon panjang komulatif terhadap lamanya waktu yang dibutuhkan
hingga motor berhenti. Pada bab ini juga akan melakukan pengambilan data di
Pusat Pengembangan dan Pemberdayaan Pendidikdan Tenaga Kependidikan
(P4TK) Medan untuk sebagai pembuktian.
BAB VKESIMPULAN
Bab ini merupakan bagian penutup berupa kesimpulann yang berkaitan dengan
pembahasan mengenai hubungan antara besarnya tahanan terhadap waktu
BAB II
MOTOR ARUS SEARAH
II.1 Umum
Motor arus searah (motor dc) adalah suatu mesin yang berfungsi mengubah
energi listrik menjadi energi mekanik, dimana energi mekanik tersebut berupa
putaran dari motor. Pada prinsip pengoperasiannya, motor arus searah sangat
identik dengan generator arus searah. Kenyataannya mesin yang bekerja sebagai
generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab
itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah
maupun generator arus searah.
Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian
yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan
tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi
magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian
jangkar seperti kumparan jangkar, komutator dan sikat.
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi
magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang
arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan
menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet
ini menimbulkan suatu gaya sehingga akan menimbulkan momen puntir atau
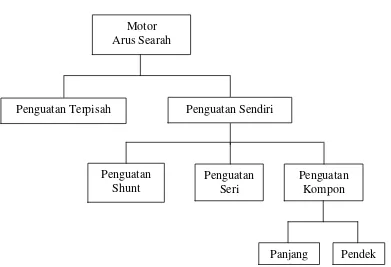
Ditinjau dari segi sumber arus penguat medan magnetnya, motor dc dapat
dibedakan atas:
1. Motor dc penguatan terpisah, bilamana arus penguat magnet diperoleh dari
tegangan diluar motor.
2. Motor dc penguatan sendiri, bilamana arus penguat magnet berasal dari
motor itu sendiri.
Gambar 2.1. Bagan Motor Arus Searah
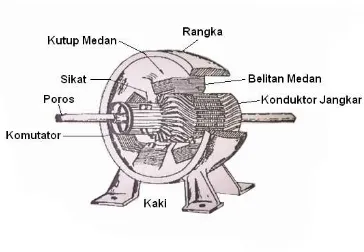
II.2 Konstruksi Motor Arus Searah
Secara umum motor dc terbagi atas dua bagian yaitu bagian yang diam
disebut stator dan bagian yang bergerak atau berputar disebut rotor. Untuk lebih
jelas dapat dilihat pada Gambar 2.2. Motor Arus Searah
Penguatan Terpisah Penguatan Sendiri
Gambar 2.2. Konstruksi motor arus searah
Ada pun konstruksi dari motor arus searah seperti yang dapat dilihat pada
gambar 2.2 diatas berikut penjelasan dari konstruksi motor arus searah :
II.2.1 Badan motor
Rangka (frame atau yoke) mesin arus searah seperti juga mesin-mesin
listrik lainnya secara umum memiliki dua fungsi, yaitu :
1. Merupakan sarana pendukung mekanik untuk mesin secara keseluruhan
2. Untuk membawa fluks magnetik yang dihasilkan oleh kutup-kutup mesin
Untuk mesin kecil, dipertimbangkan harga lebih dominan dari pada
beratnya, biasanya rangkanya terbuat dari besi tuang (cast iron), tetapi untuk
mesin-mesin besar umumnya terbuat dari baja tuang (cast steel) atau lembaran
baja (rolled steel).
Rangka ini pada bagian dalam dilaminasi untuk mengurangi rugi-rugi inti,
selain itu rangka ini juga memiliki permeabilitas yang tinggi disamping kuat
bertuliskan spesifikasi umum atau data-data teknik dari mesin, juga terdapat kotak
ujung yang merupakan tempat ujung-ujung belitan penguat medan dan lilitan
jangkar.
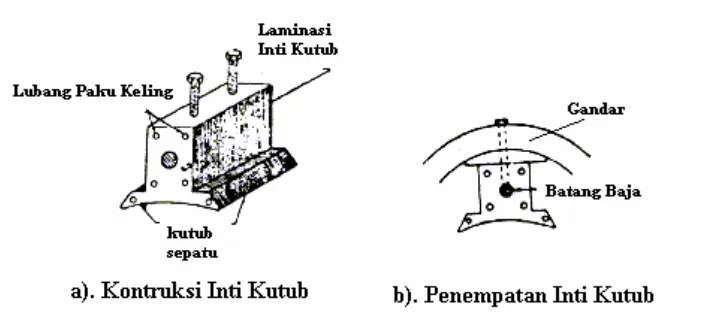
II.2.2 Kutup
Medan penguat atau magnet medan terdiri atas inti kutup dan sepatu kutup
(Gambar 2.3).
Gambar 2.3 Konstruksi kutup dan penempatannya
Fungsi dari sepatu kutup adalah :
1. Menyebarkan fluks pada celah udara dan juga karena merupakan bidang
lebar maka akan mengurangi reluktansi jalur magnet.
2. Sebagai pendukung secara mekanik untuk kumparan penguat atau
kumparan medan
Inti kutup terdiri dari lembaran-lembaran besi tuang atau baja tuang.
Sepatu kutup dilaminisasi dan dibaut atau dikeling atau (rivet) kerangka mesin.
Sebagai mana diketahui bahwa fluks magnet yang terdapat pada motor arus searah
dihasilkan oleh kutup-kutup magnet buatan dengan prinsip elektromagnetik.
Kumparan penguat atau kumparan kutup terbuat dari kawat tembaga
ukuran tertentu. Kumparan penguat medan berfungsi untuk menghasilkan medan
magnet untuk terjadinya proses elektromagnetik.
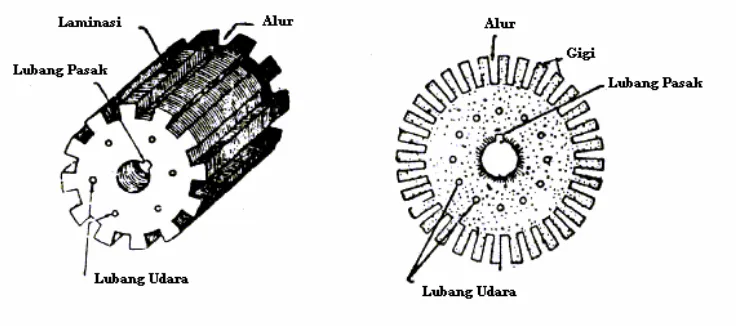
II.2.3 Inti jangkar
Inti jangkar yang umum digunakan dalam motor arus searah adalah
berbentuk silinder yang diberi alur-alur pada permukaanya untuk tempat
melilitkan kumparan-kumparan tempat terbentuknya ggl induksi. Inti jangkar
yang terbuat dari bahan feromagnetik, dengan maksud agar komponen-komponen
(lilitan jangkar) terletak dalam daerah yang induksi medan magnetnya besar
supaya ggl induksinya dapat bertambah besar. Seperti halnya inti kutup magnet
maka jangkat dibuat dari bahan-bahan berlapis-lapis untuk mengurangi panas
yang terbentuk karena adanya arus linier.
Gambar 2.4 Inti kutup yang berlapis-lapis
Bahan yang digunakan untuk jangkar ini sejenis campuran baja silikon.
Pada umumnya alur tidak hanya diisi satu kumparan tetapi disusun secara
berlapis.
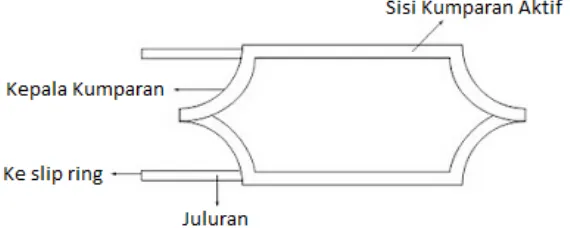
II.2.4 Kumparan jangkar
Lilitan jangkar pada motor arus searah berfungsi sebagai tempat
Pada sisi kumparan terdiri dari :
1. Sisi kumparan aktif, yaitu bagian dari kumparan yang terdapat dalam alur
jangkar yang merupakan bagian aktif (terjadi ggl induksi sewaktu motor
bekerja). Setiap sisi kumparan biasanya terdiri dari beberapa buah kawat.
2. Kepala kumparan, yaitu bagian dari kumparan yang terletak diluar alur,
dan berfungsi sebagai penghubung satu sisi kumparan aktif yang lain dari
kumparan tersebut.
3. Juluran, yaitu bagian ujung kumparan yang menghubungkan sisi aktif
dengan komutator.
Gambar 2.5 Kumparan Jangkar
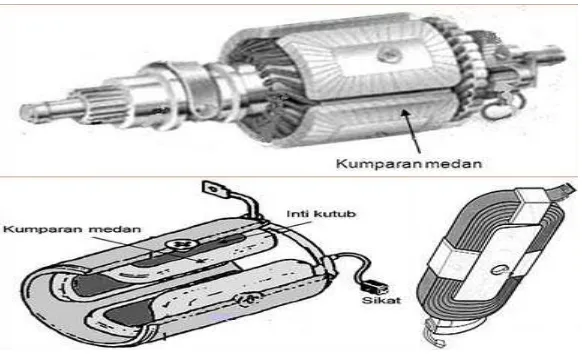
II.2.5 Kumparan medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti
kutub. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama
dibentuk dari kumparan pada setiap kutub. Pada aplikasinya rangkaian medan
dapat dihubungkan dengan kumparan jangkar baik seri maupun paralel dan juga
dihubungkan tersendiri langsung kepada sumber tegangan sesuai dengan jenis
Gambar 2.6 Kumparan Medan
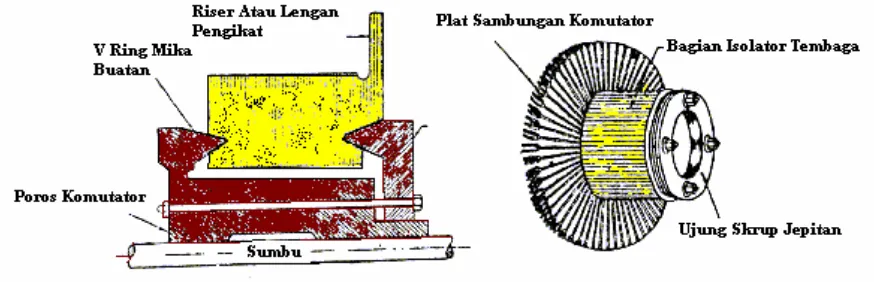
II.2.6 Komutator
Fungsi komutator adalah untuk fasilitas penghubung arus dari konduktor
jangkar sebagai penyearah mekanik yang bersama-sama dengan sikat membuat
suatu kerja sama yang disebut komutasi agar menghasilkan penyearah yang lebih
baik, maka komutator yang digunakan hendaknya dalam jumlah besar.
Dalam hal ini setiap belahan (segmen) komutator tidak lagi merupakan
bentuk separuh cincin, tetapi sudah berbentuk lempengan-lempengan (segmen
komutator).
Jikaterjadi putaran pada kumparan jangkar dalam pada medan magnet,
maka akan timbultegangan (GGL) yang berubah-ubah arah pada setiap setengah
putaran, sehinggamerupakan tegangan bolak-balik.Prinsip kerja dari arus searah
adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif
dengan menggunakan komutator, dengan demikian arus yang berbalik arah
Gambar 2.7 Komutator
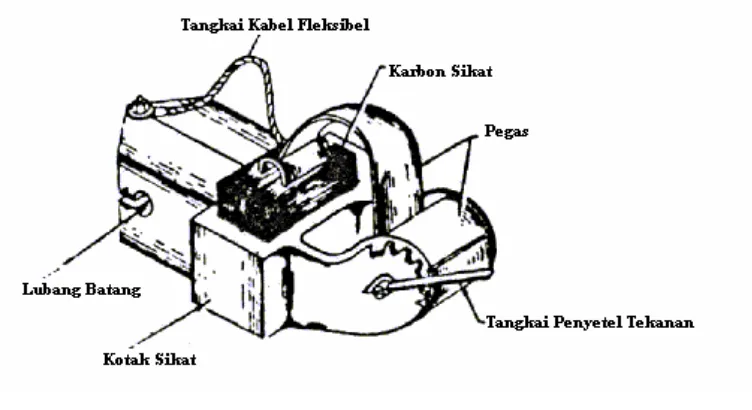
II.2.7 Sikat-sikat
Sikat-sikat ini (Gambar 2.6) berfungsi sebagi jembatan bagi aliran arus ke
kumparan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen
komutator untuk menyalurkan arus listrik. Besarnya tekanan pegas dapat diatur
sesuai dengan keinginan.
Komutator merupakan bagian yang sering dirawat dan dibersihkan karena
bagian ini bersinggungan dengan karbon sikat untuk memasukkan arus dari
jala-jala ke rotor. Karbon sikat dipegang oleh sikat pemegang agar kedudukan sikat
arang stabil. Pegas akan menekan karbon sikat sehinga hubungan karbon sikat
dengan komutator tidak goyah. Karbon sikat tidak akan memendek karena usia
Gambar 2.8 Sikat-sikat
Disamping itu sikat memegang peranan penting untuk terjadinya
komutasi. Karbon yang ada diusahakn memiliki konduktifitas yang tinggi untuk
mengurangi rugi-rugi listrik agar gesekan antara komutator-komutator dan sikat
tidak mengakibatkan arusnya komutator, maka sikat harus lebih lunak dari pada
komutator.
II.3 Prinsip Kerja Motor Arus Searah
Sebuah konduktor yang dialiri arus mempunyai medan magnet
disekelilingnya. Pada saat komutator yang dialiri arus listrik ditempatkan pada
suatu medan magnet, maka konduktor akan mengalami gaya mekanik seperti
diperlihatkan Gambar 2.9
( a ) ( b ) ( c )
Gambar 2.9.a menggambarkan sebuah konduktor yang dialiri arus listrik
menghasilkan medan magnet disekelilingnya. Arah medan magnet yang
dihasilkan oleh konduktor dapat diperoleh dengan menggunakan kaidah tangan
kanan. Kuat medan tergantung pada besarnya arus yang mengalir pada konduktor.
Gambar 2.9.b menunjukkan sebuah medan magnet yang diakibatkan oleh
kutup-kutup magnet utara dan selatan. Arah medan magnet adalah dari kutup-kutup utara
menuju kutup selatan.
Pada saat konduktor dengan arah arus menjauhi pembaca dan ditempatkan
didalam magnet seragam, maka medan gabungannya akan seperti yang
ditunjukkan Gambar 2.9.c. Daerah diatas konduktor, medan yang ditimbulkan
konduktor adalah dari kiri ke kanan, atau pada arah yang sama dengan medan
utama. Sementara dibawahnya, garis-garis magnet dari konduktor arahnya
berlawanan dengan medan utama. Hasilnya adalah memperkuat medan atau
menambah kerapatan fluksi diatas konduktor dan melemahkan medan atau
mengurangi kerapatan fluksi dibawah konduktor.
Dalam keadaan ini, fluksi di daerah diatas konduktor yang kerapatannya
bertambah akan mengusahakan gaya kebawah kepada konduktor, untuk
mengurangi kerapatannya. Hal ini menyebabkan konduktor mengalami gaya
berupa dorongan kearah bawah. Begitu juga halnya bila arus dalam konduktor
dibalik. Kerapatan fluksi yang berada dibawah konduktor berkurang sehingga
konduktor akan mendapatkan gaya tolak kearah atas. Konduktor yang mengalami
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar berikut ini
:
Gambar 2.10 Prinsip perputaran motor dc
Pada saat kumparan dihubungkan dengan sumber tegangan dan merupakan
rangkaian tertutup maka mengalirlah arus medan sehingga menghasilkan fluksi
magnet yang arahnya dari kutup utara menuju kutub selatan. Selanjutnya ketika
kumparan jangkar dihubungkan ke sumber, pada kumparan jangkar mengalir arus
jangkar. Arus yang mengalir pada konduktor-konduktor kumparan jangkar
menimbulkan fluksimagnet yang melingkar. Fluksi jangkar ini memotong fluksi
fluksi dari kedua kutup medan, sehingga menyebabkan perubahan kerapatan
fluksi dari medan utama. Hal ini menyebabkan jangkar mengalami gaya sehingga
menimbulkan torsi.
Gaya yang dihasilkan pada setiap konduktor dari sebuah jangkar,
merupakan akibat dari sebuah aksi gabungan medan utama dan medan
disekeliling konduktor. Medan disekeliling masing-masing konduktor jangkar
tergantung pada besarnya arus jangkar yang mengalir pada konduktor tersebut.
Besarnya gaya Lorentz (F) dapat ditulis :
F = B.I.L(newton) ... (2.1)
dimana :
F = Gaya lorentz (newton)
I= Arus (ampere)
L= Panjang penghantar (meter)
B= Rapat fluksi (weber/m²)
Sedangkan torsi yang dihasilkan motor dapat ditentukan dengan :
T = F.r (N-m) ... (2.2)
Bila torsi yang dihasilkan motor lebih besar daripada torsi beban maka
motor akan berputar.
Besarnya torsi beban dituliskan dengan :
T = K.∅.Ia (N-m) ... (2.3)�=
K = Konstanta (bergantung pada ukuran fisik motor)
∅ = Fluksi setiap kutup (weber)
Ia = Arus jangkar
P = Jumlah kutup
Z = Jumlah kuutp
II.3.1 Torsi Induksi
Apabila kumparan jangkar diletakkan diantara kumparan medan yang
mana medan magnetnya homogen, dan kumparan jangkar ini dialiri arus maka
timbullah gaya (F) seperti dilihatkan pada gambar 2.7. Gaya ini akan
menimbulkan torsi pada rotor. Apabila torsi yang ditimbulkan lebih besar dari
torsi beban maka rotor akan berputar.
Besarnya torsi yang ditimbulkan adalah :
T = F.r.sinα (N-m) ... (2.5)
Dimana :
r = Jari-jari
α = Sudut terbentuk antara jari-jari belitan dan gaya dalam satuan
derajat.
Kalau pada suatu saat kumparan jangkar berada pada kedudukan
horizontal (α = 90°), torsi yang terjadi merupakan penjumlahan dari torsi masing
-masing segmen (Gambar 2.8).
a. Segmen ab
Di segmen ini, arah arus menuju kearah kita dan memotong fluksi dengan arah
tegak lurus.
Besar gaya yang terjadi:
��� = �.�.�.��� 90�
��� = �.�.����
=�.�.�.��� 90�
=�.�.�.� (dengan arah berlawanan putaran jarum jam)
b. Segmen bc
Di segmen bc, arah arus sejajar dengan arah fluksi, sehingga gaya yang
terjadi adalah:
��� = �.�.�.��� 0�
= 0
Jadi: ��� = 0
c. Segmen cd
Di segmen ini, arah arus menjauhi kita dan memotong fluksi, sehingga
gaya yang terjadi adalah:
��� = �.�.�.��� 90�
=�.�.� (tegak lurus pada I dan B) Torsi yang timbul karena gaya ini adalah:
��� = �.�.����
=�.�.�.��� 90�
=�.�.�.� (dengan arah arus menuju ke arah kita dan memotong fluksi dengan arah tegak lurus pada arah I dan B).
d. Segmen da
Di segmen ini, arah arus menuju kearah kita dan memotong fluksi dengan
tegak lurus pada arah I dan B.
Besar gaya yang terjadi adalah:
= 0
Rumusan ini berlaku untuk kumparan lilitan tunggal dimana jumlah
konduktor adalah 2 buah.
Untuk torsi yang dibangkitkan oleh suatu konduktor adalah:
����� = �.�.�.� (N-m) ... (2.6)
Jika ada a percabangan arus (cabang paralel) pada motor dan total arus
jangkar sebesar Ia, maka arus yang mengalir pada suatu konduktor adalah:
�=��� (A) ... (2.7)
Dan torsi pada satu konduktor pada motor adalah:
����� = �.�.�.���� (N-m) ... (2.8)
Fluksi per kutub pada motor adalah:
Torsi yang dibangkitkan oleh motor bila jumlah Z konduktor adalah:
II.3.2 Gaya Gerak Listrik (GGL) Lawan
Ketika jangkar motor berputar konduktornya juga berputar dan memotong
fluksi utama. Sesuai dengan hukum Faraday, akibat gerakan konduktor di dalam
suatu medan magnetik maka pada konduktor tersebut akan timbul GGL induksi
yang diinduksikan pada konduktor tersebut dimana arahnya berlawanan dengan
tegangan yang diberikan pada motor. Karena arahnya berlawanan, maka hal
tersebut disebut GGL lawan.
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan
berikut:
�� =��60� �.∅(����) (2.14)
Persamaan tegangan secara umum dapat dituliskan sebagai berikut:
�� =�′.�.∅ (����) (2.15)
Dimana:
�′ = �.�
�.60 (2.16)
Pengaruh ggm jangkar pada distribusi fluksi medan utama dicelah utara
disebut reaksi jangkar. Ggm jangkar akan menghasilkan dua pengaruh yang tidak
diinginkan pada fluksi medan utama yaitu :
1. Reduksi jala-jala pada fluksi medan utama masing-masing kutup.
2. Distorsi gelombang fluksi medan utama masing-masing kutup sepanjang
celah udara.
Reduksi dalam fluksi utama masing-masing kutup mengurangi tegangan
utama dan torsi yang dihasilkan, dimana torsi fluksi medan utama mempengaruhi
batasan keberhasilan komutasi dalam mesin arus searah.
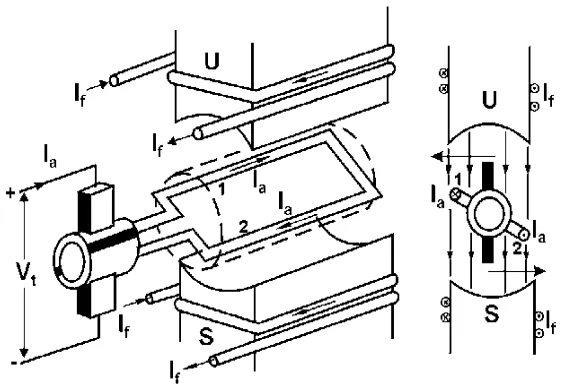
Gambar 2.11.a memperlihatkan jalur fluksi untuk kutup utama dari mesin
arus searah dua kutup tanpa beban yaitu tanpa arus jangkar. Bila mesin arus
searah dibebani, maka arus akan mengalir didalam kumparan jangkar. Arus ini
terlihat dalam Gambar 2.11.b oleh dot pada kutup S (selatan) dan cross pada
kutup U (utara). Arus jangkar ini membentuk fluksi jangkar seperti terlihat dalam
gambar 2.11.b. Jika mesin arus searah dari Gambar 2.11 bekerja sebagai motor,
maka jangkar haruslah berputar berlawanan arah dengan jarum jam, karena kutup
U dan S dari medan utama yang harus menarik kutup S dan U yang dihasilkan
U
S
Gambar 2.11 Ilustrasi daerah distribusi dari ; (a) Fluksi kutup medan,
(b) Fluksi jangkar, (c) Resultan dari kedua fluksi.
Dari Gambar 2.11.b menunjukkan juga bagian tengah inti jangkar dan
didalam kutup yang berhadapan, jalur fluksi yang dibangkitkan oleh arus jangkar
tegak lurus dengan jalur fluksi utama. Dengan kata lain, jalur dari fluksi jangkar
ini menyilang jalur fluksi medan utama.
Dengan demikian, pengaruh gaya gerak medan mgnet (ggm) jangkar pada
medan utama adalah merupakan magnetisasi silang yang disebut fluksi silang.
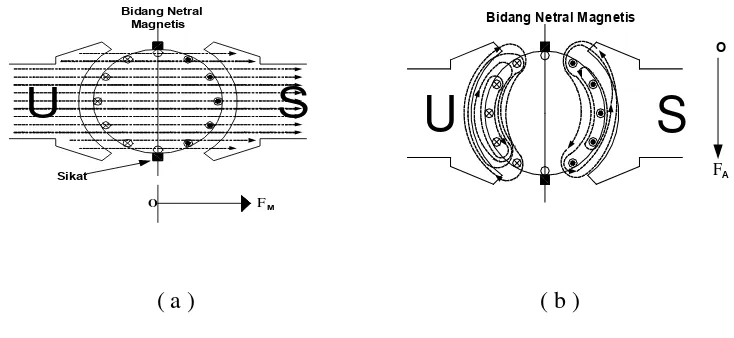
Ketika arus mengalir kedalam jangkar dan kumparan medan, maka distribusi
fluksi resultan diperoleh dari penggabungkan dua fluksi.
Dimana fluksi reaksi jangkar memperkuat fluksi medan utama disatu
bagian dan melemahkan fluksi medan dibagian lain pada kutup utama. Jika tidak
ada kejenuhan magnetik, maka jumlah penguatan dan pelemahan dari fluksi
medan utama adalah sama dan fluksi resultan perkutup masih tetap tidak berubah
dari nilai tanpa bebannya. Secara aktual, kejenuhan magnetik akan terjadi, dan
akibatnya efek kekuatan ini lebih kecil dibandingkan dengan efek demagnetisasi
Masalah kedua akibat adanya reaksi jangkar adalah pelemahan fluksi.
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat dengan titk
jenuhnya .Pengaruh kejenuhan magnetik pada reduksi fluksi medan utama dapat
dijelaskan dengan bantuan Gambar 2.12 pada sisi lain dari sumbu d, ggm resultan
adalah ( Fk – Fj ) dimana Fk = ggm medan utama. Karena pada lokasi
dipermukaan kutup dimana gaya gerak magnet (ggm) rotor menambahkan
permukaan kutup dan ggm rotor mengurangi ggm kutup, terdapat penurunan
rata-rata kerapatan fluks yang lebuh besar, sehingga penjumlahan rata-rata-rata-rata kerapatan
fluksi yang terjadi adalah kerapatan fluks kutup yang semakin berkurang.
Gambar 2.12 Kurva pemagnetan ketika terjadi reaksi jangkar
Akibat pelemahan fluksi ini pada motor arus searah efek yang ditimbulkan
menjadi lebih serius, dimana pelemahan fluks akan menyebabkan motor arus
searah khususnya motor arus searah paralel akan demikian cepatnya hingga tak
terkendali.
O
Φ
FF z
x y
II.3.3.1 Mengatasi Masalah Reaksi Jangkar
Ada tiga cara untuk mengatasi permasalahan yang timbul akibat reaksi
jangkar, yaitu :
1. Pergeseran sikat (Brush shifting)
Ide dasarnya adalah memindahkan sikat seirama dengan perpindahan
bidang netral untuk menghindari percikkan bunga api yang mungkin timbul.
Namun dalam penerapannya hal ini cukup sulit karena jarak perpindahan bidang
netralnya sangat ditentukan oleh besarnya beban yang dipikul oleh mesin
sehingga sikat harus juga diubah setiap saat, sesuai dengan perubahan jarak
perpindahan bidang netral. Selain itu pergeseran sikat ini akan memperburuk
melemahnya fluksi akibat reaksi jangkar mesin dapat diperlihatkan Gambar 2.13.
U
S
rotor Γresultan Γrotor
Γkutub
2. Kutup Bantu (Interpole)
Ide dasar dari solusi masalah ini jika nilai tegangan pada kawat-kawat
yang sedang melakukan proses komutasi/penyearahan dibuat nol, maka tidak akan
mendapat percikkan bunga api pada sikat-sikat mesin tersebut. Untuk itu, kutup
bantu (interpole) ini dihubungkan seri terhadap kumparan jangkar dapat
diperlihatkan pada Gambar 2.14.
Ketika beban yang dipikul mesin meningkat dan arus jangkarpun
meningkat, besarnya perubahan/pergeseran bidang netral meningkat pula. Hal
tersebut akan menyebabkan timbulnya tegangan pada konduktor-konduktor yang
sedang melakukan komutasi. Pada saat itu juga fluks kutup bantu juga meningkat,
menghasilkan tegangan pada konduktor-konduktor tersebut dan berlawanan
dengan tegangan yang timbul akibat pergeseran bidang netral.
Jangkar
Gambar 2.14. Kumparan mesin dc yang dilengkapi dengan kutup bantu.
3. Belitan kompensasi (Compensating winding)
Untuk kerja motor yang berat maslah pelemahan fluksi menjadi sangat
penting. Untuk mengatasi masalah tersebut salah satunya dengan menambah
lilitan kompensasi. Belitan kompensasi ini dihubungkan seri terhadap kumparan
jangkar, kumparan jangkar ini bertujuan untuk mengurangi penyimpangan yang
diimbangi oleh fluksi belitan kompensasi sehingga bidang netralnya tidak
bergeser.
II.4 Jenis-Jenis Motor Arus Searah
II.4.1Motor Arus Searah Penguatan Bebas
Rangkaian ekivalen motor dc penguat bebas
Gambar 2.15 Rangkaian ekivalen motor DC penguatan bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber
tegangan penguatannya berasal dari luar motor. Di mana kumparan medan
disuplai dari sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus
searah penguatan bebas dapat dilihat pada gambar di atas.
Dari rangkaian tersebut diperoleh persamaan umum motor DC penguat bebas :
�� = �� +��.�� (volt) ... (2.17)
�� = ��.�� ... (2.18)
Dimana: �� = Tegangan terminal jangkar motor DC (Volt)
�� = Arus jangkar (Ampere)
�� = Tahanan jangkar (Ohm)
�� = Tegangan medan penguatan bebas (Volt)
�� = Tahanan medan penguatan bebas (Ohm)
�� = Gaya gerak listrik motor DC (Volt)
II.4.2 Motor Arus Searah Penguatan Sendiri
Pada motor arus searah penguatan sendiri ada tiga jenis motor arus searah
berdasarkan penguatan medan magnet sendiri, yaitu :
1. Motor Arus Searah Penguatan Shunt
Rangkaian ekivalen motor DC penguatan shunt
Gambar 2.16. Rangkaian ekivalen motor DC penguatan shunt
Pada motor shunt kumparan jangkar dihubungkan langsung pada terminal
sehingga paralel dengan kumparan jangkar.
Persamaan umum motor DC penguatan shunt
�� = �� +��.��(Volt) ... (2.19)
��ℎ =�� =��ℎ.��ℎ(Volt) ... (2.20)
�� =�� +��ℎ(Ampere) ... (2.21)
Dimana: �� = Tegangan terminal medan shunt motor DC (Volt)
��ℎ = Arus kumparan medan shunt (Ampere)
��ℎ = Tahanan medan shunt (Ohm)
2. Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor DC penguatan seri
Gambar 2.17. Rangkaian ekivalen motor DC penguatan seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan
secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada
kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Persamaan umum motor DC penguatan seri
�� = �� +��(�� +��) (Volt) ... (2.22)
�� = (����−�+���) (Volt) ... (2.23)
�� = �� (Ampere) ... (2.24)
Dimana: �� = Arus kumparan seri (Ampere)
3. Motor Arus Searah Penguatan Kompon
Motor dc yang memililki penguatan medan seri dan medan shunt disebut
motor kompon. Pada penguatan seri dengan menambah medan shunt disebut
kompon bantu dan sebaliknya, medan seri mengurangi medan shunt disebut motor
kompon lawan.
Pada motor arus searah penguatan kompon terbagi atas dua bagian, yaitu :
a. Motor Arus Searah Penguatan Kompon Panjang
Rangkaian ekivalen:
(a)
(b)
Gambar 2.18. (a) Rangkaian Ekivalen Motor DC Kompon Panjang Lawan
Persamaan umum:
�� = �� +��. (�� +��) (Volt) ... (2.25)
�� = ��ℎ.��ℎ (Volt) ... (2.26)
�� = ��ℎ +�� (Ampere) ... (2.27)
b. Motor Arus Searah Penguatan Kompon Pendek
Rangkaian ekivalen:
(a)
(b)
Gambar 2.19. (a) Rangkaian Ekivalen Motor DC Kompon Pendek Lawan
Persamaan umum:
�� = �� +��.��ℎ +��.�� (Volt) ... (2.28)
�� = ��ℎ.��ℎ(Volt) ... (2.29)
BAB III
PENGEREMAN MOTOR ARUS SEARAH
III.1 Umum
Pengereman motor arus searah adalah suatu usaha atau gaya yang
diberikan terhadap motor dc yang sedang berputar agar motor mengalami
perlambatan ataupun berhenti dalam waktu singkat. Pengereman merupakan suatu
persoalan yang sangat penting pada motor listrik seperti motor-motor yang
digunakan untuk alat pengangkat.
Metode penghentian motor yang paling umum adalah dengan
menghilangkan tegangan suplai sehingga motor dan beban berhenti. Pada
beberapa aplikasi, motor harus dihentikan lebih cepat atau dipertahankan
putarannya. Pengereman listrik menggunakan lilitan motor untuk menghasilkan
torsi yang memperlambat. Ada banyak keadaan dimana diperlukannya dalam
menurunkan kecepatan motor dc dan beban yang digerakkannya. Motor yang
dipergunakan sebagai penggerak pada suatu lintasan yang menurun, misalnya
kereta api listrik yang menuruni lereng bukit atau sebuah elevator yang
mengangkat beban akan mengalami percepatan akibat energi potensial. Motor
akan berputar semakin cepat hingga suatu kecepatan yang yang tidak terkontrol
dan berbahaya. Untuk itu motor harus diberikan pengereman agar kecepatannya
berkurang. Energi listrik dari rotor dan beban dihilangkan sebagia batang-batang
rotor dari motor.
Sistem pengereman sangat menentukan keamanan dan keselamatan pada
berputar akibat adanya gesekan yang terjadi pada motor. Namun tentu saja
perlambatan yang disebabkan gesekkan ini memerlukan waktu yang lama agar
motor berhenti.
Penggunaan rem mekanik untuk memperlambat dan menghentikan motor
sangat terbatas. Rem mekanik bekerja dengan cara menjepit bagian yang berputar
agar motor menjadi lambat dan berhenti. Jika motor yang direm pada keadaan
berputar dengan sangat cepat dan pada lintasan yang menurun dan panjang,
gesekkan yang terjadi pada rem akan membuat temperatur rem sangat panas. Pada
keadaan ini rem membutuhkan waktu yang lama untuk melepaskan panas agar
rem dingin dan dapat beroperasi kembali. Ini tentunya tidak memungkinkan
karena motor harus bekerja kembali.
Permasalahan ini menyebabkan pengereman elektrik menjadi sangat
diperlukan. Pengereman elektrik memperlambat motor yang sedang berputar dan
menghentikannya dalam waktu yang singkat dan kembali seperti semula dalam
waktu yang sangat cepat. Hal ini sangat bermanfaat agar motor dapat terus
dioperasikan.
Kemampuan pengereman elektrik berkebalikan pengereman mekanik.
Pengereman elektrik memberikan gaya pengereman melalui tahanan pengereman
yang sangat besar pada putaran yang cepat, sedangkan rem mekanik bekerja
dengan menahan poros sehingga putaran dapat diperlambat dan mampu menahan
motor hingga berhenti. Sedangkan kombinasi pengereman elektrik dan mekanik
menghasilkan suatu sistem pengereman yang baik. Didalam pengereman elektrik,
Dalam hal ini, motor memutar beban dengan torsi dapat dilihat seperti
pada persamaan 3.1. sebagai berikut.
�=��+����
�� (3.1)
Dimana:
� = Momen inersia (Kg/m)
�� = Kecepatan sudut (rad/detik)
� = Torsi (N-m)
�� = Torsi beban (N-m)
Persamaan 3.1 dapat di tunjukkan pada Gambar 3.1
Gambar 3.1. Sistem Motor Berbeban
III.2 Jenis-Jenis Pengereman Pada Motor Arus Searah
Ada tiga jenis pengereman pada motor arus searah untuk digunakan dalam
berbagai aplikasi yaitu :
1. Pengereman Regeneratif
2. Pengereman Plugging
3. Pengereman Dinamik
III.2.1 Pengereman Regeneratif
Jenis pengereman ini mempunyai konsep yang sangat sederhana. Pada
tanpa mengubah rangkaian. Pengereman regeneratif terjadi pada saat kecepatan
motor melebihi kecepatan nominalnya.
Sewaktu motor yang berputar berjalan pada suatu lintasan yang menurun
misalnya kecepatan kerja kereta api yang menuruni lereng bukit, maka motor akan
mengalami percepatan meskipun tegangan yang diberikan tetap.
Gambar 3.2 Pengereman Regeneratif Pada Motor DC
Vo adalah gaya gerak listrik yang dibangkitkan oleh mesin arus searah,
sedangkan Vt adalah tegangan sumber bagi motor sekaligus merupakan baterai
yang diisi. Ra dan La masing-masing adalah hambatan dan induktansi jangkar.
Ketika saklar pemenggal dihidupkan, maka arus mengalir dari jangkar,
melewati saklar dan kembali ke jangkar. Ketika saklar pemenggal dimatikan,
maka energi yang tersimpan pada induktor jangkar akan mengalir melewati dioda,
baterai dengan tegangan Vt dan kembali ke jangkar.
Kecepatan motor yang bertambah melebihi kecepatan nominalnya
sehingga Eaakan lebih besar dari Vt.Ea yang lebih besar dari Vt menyebabkan arus
Ia berubah dan motor akan berlaku sebagai generator yang mengirim arus
Keuntungan penggunaan pengereman regeneratif adalah energi yang
dihasilkan oleh motor akibat perputaran tidak akan dilepas atau dibuang tetapi
masih dapat dipergunakan sehingga secara ekonomis sangat menguntungkan.
Permasalahan pada pengerman regeneratif adalah ketika jaringan tidak
mampu untuk menerima atau mengkonsumsi semua energi yang dihasilkan,
sehingga kecepatan motor tidak akan jauh berkurang, maka terkadang pengerman
regeneratif sulit untuk diandalkan.
III.2.2 Pengereman Plugging
Pengereman ini disebut juga pengereman mendadak yaitu pengereman
motor dalam waktu yang singkat dan tiba-tiba. Pengereman ini dilakukan dengan
membalikkan polaritas sebuah motor dc.
Rangkaian pengereman plugging sebuah motor arus searah penguatan
bebas ditunjukkan gambar 3.4
Jika terminal jangkar sebuah motor dc dibalik polaritasnya, maka arah
tegangan sumber akan berubah dan menjadi searah dengan ggl lawan. Antara
tegangan sumber dan ggl lawan saling menambahkan.
Untuk menghindari arus yang terlalu besar, harus diberikan sebuah
tahanan yang dipasang seri dengan tahanan jangkar. Tahanan ini perlu dipasang
karena tegangan pada rangkaian menjadi Vt + Ea. Besar tahanan yang
dipergunakan sebaiknya kira-kira dua kali besar tahanan start motor.
Hali ini menyebabkan nilai Ea berkurang (Ea=c.n.∅ ), sehingga kecepatan
putar motor berkurang dimana konstan. Hal terpenting pada pengereman plugging
adalah pada saat kecepatan putaran motor menjadi nol, jangkar harus dilepaskan
dari sumber tegangan. Jika pada jangkar masih ada mengalir arus, motor akan
kembali berputar dengan arah yang berlawanan.
III.2.3 Pengereman Dinamik
Pengereman dinamik merupakan suatu pengereman motor listrik yang
sangat praktis dan memberikan gaya pengereman yang sangat baik. Pengereman
ini dilakukan dengan melepaskan jangkar sebuah motor yang berputar dari sumber
tegangan dan membuat motor berlaku sebagai generator dengan memasangkan
tahanan pada terminal jangkar.
Pengereman dinamik pada motor arus searah penguatan bebas (Gambar
3.2.a) dan motor arus searah penguatan bantu (Gambar 3.2.b) digambarkan
Gambar 3.4a. Sebelum Pengereman Dinamik
Gambar 3.4b. Saat Pengereman Dinamik
Dari gambar 3.4a didapat persamaan sebagai berikut:
�� = �� +��.��(Volt) ... (3.2)
�� =�.�.∅ (Volt) ... (3.3)
��� =��.�� (Watt) ... (3.4)
���� = ��.�� =��. 2.�.� (Watt) ... (3.5)
�� =��+���� (N-m) ... (3.6)
�� =��+������(N-m) ... (3.7)
Keterangan:
���� = Torsi rem (N-m)
�� = Arus kumparan jangkar (Ampere)
�� = Gaya gerak listrik jangkar (Ampere)
�� = Tahanan jangkar (Ohm)
�� = Torsi yang dibangkitkan (N-m)
���� = Daya Keluar (Watt)
��� = Daya masuk (Watt)
∅= Fluksi (Wb)
Pada saat motor DC penguatan bebas direm dengan pengereman dinamik
maka didapatkan Vt = 0 disebabkan motor telah terhubung ketahanan.
�� =��(�� +����) (Volt) ... (3.8)
Dapat TL = 0 karena motor tidak dapat lagi memikul beban sehingga Tt
sama denga Trem.
�� =������ (N-m) ... (3.9)
Pengereman dinamik pada motor kompon panjang bantu.
Gambar 3.5a. sebelum pengereman dinamik
Gambar 3.5b. Saat Pengereman Dinamik
Gambar 3.5 Pengereman motor DC penguatan kompon panjang bantu
Pada saat motor sedang berputar, arus jangkar dilepaskan dari sumber
tegangan sehingga motor tidak lagi mendapat daya dari jala-jala. Pada keadaan
ini, dimana belitan medan tetap terhubung kesumber dan motor akan menjadi
generator. Motor ini akan membangkitkan tegangan induksi sebesar Ea = c.n.∅.
Pada saat bersamaan pada terminal jangkar dipasangkan sebuah tahanan
menyebabkan energi yang dimiliki oleh jangkar yang berputar akan dilepaskan
secara cepat dalam bentuk panas melalui tahanan. Lamanya waktu pengereman
bergantung pada kecepatan motor dan besarnya tahanan perlu diperhitungkan agar
motor berhenti pada waktu yang diharapkan. Besarnya arus yang mengalir pada
waktu pengereman ditentukan oleh besarnya tahanan, yaitu :
Ia =
Ea
Ra +Rrem (3.11)
Dengan Ra adalah tahanan jangkar dan Rrem adalah tahanan pengereman.
Pengereman dinamik pada motor dc menjadi sangat dibutuhkan karena motor dc
sering digunakan untuk mengangkat dan menggerakkan beban yang berat yang
mungkin sulit untuk dihentikan.
Tipe pengereman ini digunakan secara luas dalam hubungannya dengan
pengendalian elevator, alat-alat pengangkat serta dalam penggunaan lain dimana
motor harus sering distart dan dihentikan.
Jika tahanan diperkecil, maka torsi pengereman yang ditimbulkan akan
bertambah besar, sehingga waktu yang dibutuhkan motor untuk berhenti akan
menjadi lebih singkat, jika nilai tahanan diperbesar maka torsi pengereman yang
ditimbulkan akan bertambah kecil, sehingga waktu yang dibutuhkan motor untuk
berhenti akan menjadi lebih lama. Besarnya tahanan pengereman sangat
menetukan waktu yang diperlukan untuk berhenti. Untuk mendapatkan waktu
yang diinginkan agar motor berhenti dapat dilakukan dengan mengubah-ubah
BAB IV
HUBUNGAN ANTARA BESARNYA TAHANAN TERHADAP WAKTU PENGEREMAN DINAMIK PADA MOTOR DC PENGUATAN KOMPON
PANJANG KOMULATIF
Aplikasi pada Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan
IV.1 Umum
Motor dc yang memililki penguatan medan seri dan medan shunt disebut
motor kompon. Pada penguatan seri dengan menambah medan shunt disebut
kompon bantu dan sebaliknya, medan seri mengurangi medan shunt disebut motor
kompon lawan.
Motor dc kompon bantu membangkitkan torsi yang besar ketika
bertambahnya torsi beban, yang sama seperti motor seri. Bagaimanapun juga
motor kompon bantu memiliki keterbatasan pengaturan kecepatan putaran tanpa
beban, sehingga tidak ada masalah pada putaran. Hal ini membuat bentuk
keistimewaan dapat disesuaikan untuk penggunaan beban yang besar secara
tiba-tiba.
Pengereman dinamik motor dc merupakan akibat dari pelepasan sumber
kesuatu tahanan variabel. Pengereman dinamik pada motor arus searah penguatan
kompon panjang komulatif mempergunakan tahanan untuk mengalirkan arus.
Tahanan berfungsi sebagai beban yang mengkonsumsi energi yang dihasilkan
mula dengan tahanan sebagai sekumpulan konsumen yang mengkonsumsi energi
yang dihasilkan.
Ketika sebuah motor yang berputar dilepaskan dari sumber pencatu, motor
tersebut masih memiliki energi karena motor masih berputar. Besar energi listrik
yang dibangkitkan tergantung pada kecepatan motor saat motor dilepaskan dari
sumber pencatu. Karena fluks sisa pada belitan medan dan putaran masih ada
sehingga motor tersebut akan berfungsi sebagai generator. Motor akan
membangkitkan tegangan induksi yang berbanding lurus dengan kecepatan.
IV.2 Peralatan pengujian
1 Voltmeter
2 Amperemeter
1 Tahanan Pengereman
3 Tahanan Beban
1 Catu daya dc
1 Kontaktor
2 MCB
1 Saklar tekan
2 mesin dc
IV.3 Spesifikasi Motor
Ada 2 motor yang digunakan pada pengujian ini, dimana kedua motor
tersebut memiliki spesifikasi yang sama, yaitu :
Type : SE : 2662-5D
P = 1 kW n = 2040 rpm
Kelas Isolasi = B IP = 20
V = 220 V
Hasil pengukuran :
Lilitan terpisah (J-K) = 281,8 Ω
Lilitan jangkar (GA-HB) = 4,5 Ω
IV.4 Rangkaian Pengujian
IV.4..1 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif tanpa beban
(a) (b)
Gambar 4.1 (a) Rangkaian pengereman dinamik motor DC penguatan kompon
IV.4.2 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif berbeban
(a) (b)
Gambar 4.2 (a) Rangkaian pengereman dinamik motor DC penguatan kompon
IV.5 Prosedur Percobaan
IV.5.1 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif tanpa beban
a. Rangkai peralatan seperti pada gambar 4.1
Catu daya dc dihubungkan ke motor dc penguatan kompon panjang
komulatif.
b. Tekan tombol start maka arus mengalir ke belitan C dan berenergize,
sehingga C1dan C2 menutup maka arus mengalir ke alat ukur Vt dan alat
ukur IL dimana C5 membuka, arus mengalir ke Rshunt dan C3, dimana C6
membuka arus mengalir ke Rseri dan C4 dimana C7 membuka dan arus
mengalir ke alat ukur Ia dan motor bekerja.
c. Atur tegangan suplai sampai tegangan nominal 220 Volt.
d. Catat arus IL dan Ia saat menjadi motor.
e. Atur tahanan pengereman sesuai yang diinginkan secara bertahap (118
ohm, 177 ohm, 236 ohm, 295 ohm, 354 ohm, 413 ohm, 472 ohm, 531
ohm)
f. Siap-siap mengukur waktu dengan stop watch dan lepaskan sumber
tegangan motor dengan menekan tombol stop, dimana C1 dan C2
membuka, arus mengalir ke alat ukur Ia dan ke C7 dimana C4 membuka,
arus mengalir ke Rseri dan ke C6 dimana C3 membuka arus mengalir ke
Rshunt dan ke alat ukur IL, arus mengalir ke alat ukur Vt, C5 dan ke Rrem
sehingga motor terhubung ke tahanan yang telah diatur. Percobaan
dilakukan sebanyak tiga kali dengan tahanan pengereman yang sama.
g. Catat arus jangkar, arus beban, dan waktu pengereman.
IV.5.2Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif berbeban
a. Rangkai peralatan seperti pada gambar 4.2
Catu daya dc dihubungkan ke motor dc penguatan kompon panjang
komulatif.
b. Tekan tombol start arus mengalir kebelitan C dan berenergize, dimana
C1dan C2 menutup maka arus mengalir ke alat ukur Vt dan alat ukur IL
dimana C5 membuka, arus mengalir ke Rshunt dan C3, dimana C6 membuka
arus mengalir ke Rseri dan C4 dimana C7 membuka dan arus mengalir ke
alat ukur Ia dan motor bekerja.
c. Atur tegangan suplai sampai tegangan nominal 220 Volt.
d. Atur tahanan pengereman sesuai yang diinginkan secara bertahap (118
ohm, 177 ohm, 236 ohm, 295 ohm, 354 ohm, 413 ohm, 472 ohm, 531
ohm)
e. Atur beban motor dengan mengatur beban generator penguatan bebas.
f. Catat arus IL dan Ia saat menjadi motor.
g. Siap-siap mengukur waktu dengan stop watch dan lepaskan sumber
tegangan motor dengan menekan tombol stop, dimana C1 dan C2
membuka, arus mengalir ke alat ukur Ia dan ke C7 dimana C4 membuka,
arus mengalir ke Rseri dan ke C6 dimana C3 membuka arus mengalir ke
Rshunt dan ke alat ukur IL, arus mengalir ke alat ukur Vt, C5 dan ke Rrem
sehingga motor terhubung ke tahanan yang telah diatur. Percobaan
dilakukan sebanyak tiga kali dengan tahanan pengereman yang sama.
h. Catat arus jangkar, arus beban, dan waktu pengereman.
IV.6 Data Hasil pengujian
IV.6.1 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif tanpa beban
Data motor tanpa beban sebelum direm :
Vt = 220 Volt
Tabel 4.1 Data pengujian motor tanpa beban saat direm
354
2,74
2,82
2,63
413
2,80
2,84
2,70
472
2,89
2,87
2,92
531
2,95
2,90
IV.6.2 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif berbeban
Data motor berbeban sebelum direm :
Vt = 220 Volt
Tabel 4.2 Data pengujian motor berbeban saat direm
354
1,81
1,76
1,76
413
1,84
1,79
1,79
472
1,88
1,85
1,83
531
1,92
1,90
IV.7 Analisa Data Pengujian
IV.7.1 Rangkaian pengereman dinamik pada motor dc kompon panjang komulatif tanpa beban
Dari hasil pengujian maka didapat :
Trem = �������
Cara perhitungan yang dilakukan untuk data lainnya, dipakai cara yang
sama.
IV.7.2 Rangkaian pengereman dinamik pada motor dc kompon panjang Komulatif berbeban
Dari hasil pengujian maka didapat :
� = 2060
Cara perhitungan yang dilakukan untuk data lainnya, dipakai cara yang
sama.
Tabel 4.3 Hasil Pengujian Pengereman Dinamik Kompon Panjang Komulatif
Tahanan Rem
(Ω)
Tanpa Beban Berbeban
IV.8. Grafik Pengujian
IV. 8. 1. Grafik Pengujian Motor Tanpa Beban Saat di Rem
Gambar 4.3. Grafik Pengujian Motor Tanpa Beban Saat di Rem
BAB V PENUTUP
V.1 KESIMPULAN
Dari pembahasan dan penelitian yang telah dilakukan maka dapat
disimpulkan sebagai berikut :
1. Berdasarkan hasil pengujian pengereman dinamik motor arus searah
penguatan kompon panjang tanpa beban dengan tahanan sebesar 118 Ω
diperoleh torsi pengereman 0,27 N-m dan waktu pengereman 2,02 detik,
kemudian pada tahanan 177 Ω diperoleh torsi pengereman 0,18 dan waktu
pengereman 2,27 detik, dan pada tahanan 236 Ω diperoleh torsi
pengereman 0,14 N-m dan waktu pengereman 2,42 detik. Terlihat bahwa
semakin besar tahanan yang diberikan maka semakin besar torsi
pengereman sehingga waktu pengereman pada motor semakin lama.
2. Berdasarkan hasil pengujian pengereman dinamik motor arus searah
penguatan kompon panjang berbeban dengan tahanan sebesar 118 Ω
diperoleh torsi pengereman 0,19 N-m dan waktu pengereman 1,63 detik,
kemudian pada tahanan 177 Ω diperoleh torsi pengereman 0,12 N -m dan
waktu pengereman 1,67 detik, dan pada tahanan 236 Ω diperoleh torsi
pengereman 0,09 N-m dan waktu pengereman 1,71 detik. Terlihat bahwa
semakin besar tahanan yang diberikan maka semakin besar torsi
pengeremannya sehingga waktu pengereman pada motor semakin lama.
V.2 SARAN
1. Untuk sebagai bahan perbandingan lakukan pengujian dengan
menggunakan pengereman regeneratif dan pengereman plugging
2. Kepada teman-teman mahasiswa yang akan mengerjakan tugas akhir
sebaiknya melakukan pengujian di Pusat Pengembangan dan
DAFTAR PUSTAKA
1. Chapman, Stephen J, “Electric Machinery Fundamentals”,Third Edition Mc
Graw Hill Companies, New York, 1999.
2. Lister, E.C., “Mesin dan Rangkaian Listrik”, Sixth Edition, McGraw-Hill,
Inc., 1984.diterjemahkan oleh : Ir.Drs. Gunawan, H., P.T. Gelora Aksara
Pratama, 1993.
3. Ramshaw, Raymond., “Energy Conversion Electric Motors and Generator”,
Saunders College Publishing, United States of America, 1990.
4. Theraja, B.L. & Theraja, A.K., “A Text Book of Electrical Technology”,
New Delhi, S.Chand and Company Ltd., 2001.
5. Wijaya, Mochtar,”Dasar-Dasar Mesin Listrik”, Penerbit Djambatan, Jakarta
, 2001.
6. Zuhal, “Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Edisi ke-5,