In this final project will be made a tool for controlling and monitoring the water levels on the tank level process. The control process using the Adaptive Neuro Fuzzy Interference System (ANFIS). This control use to build for minimize overshoot and rise time. To detect the level of water used infrared object detector sensor (Sharp GP2d12) and then connected to Op Amp circuit and forwarded to the circuit analog to digital converter (ADC 0804). ADC convert analog data from sensors into digital data in binary form, then the data from ADC with 8-bit wide going on out into a single output through a multiplexer circuit (CD4051), the data from this multiplesker will enter into the computer via a parallel communication to be processed through a LabVIEW program, which will be monitoring water levels and levels of motor control stepper so that the expected height of the water level (setpoint) is reached.
ABSTRAK
Pada tugas akhir ini akan dibuat suatu alat untuk mengontrol dan memonitoring level ketinggian air pada tangki proses. Proses pengontrolan ini menggunakan Adaptive Neuro Fuzzy Interference System (ANFIS). Proses pengontrolan ini dilakukan agar proses sistem ketika mencapai set point (rise time) tidak lama dan dapat memperkecil lonjakan maksimum (overshoot). Untuk mendeteksi level ketingian air digunakan sensor infrared object detector (Sharp GP2d12) yang kemudian terhubung ke rangkaian Op Amp dan diteruskan ke rangkaian analog to digital converter (ADC 0804) untuk mengubah data analog dari sensor menjadi data digital dalam bentuk biner, selanjutnya data-data dari analog to digital converter (ADC) dengan lebar 8-bit akan di keluarkan menjadi satu keluaran melalui rangkaian multiplekser (CD4051), data dari multiplesker ini akan masuk ke dalam komputer melalui komunikasi parallel untuk diolah melalui program LabVIEW yang kemudian akan memonitoring level ketinggian air dan mengontrol putaran motor stepper sehingga level ketinggian air yang diharapkan (setpoint) tercapai.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pada tempat-tempat penampungan air seringkali diperlukan suatu mekanisme untuk mengetahui ketinggian permukaan air. Seringkali mekanisme tersebut masih berupa cara-cara manual, misalnya dengan melihat dan melakukan pengukuran langsung pada tempat penampungan air tersebut. Mungkin cara tersebut merupakan cara yang paling sederhana dan gampang, tetapi akan sedikit sulit jika misalnya letak penampungan air tersebut sulit dijangkau manusia, misalnya diatas atap bangunan atau jika malam hari dan penerangan sekitar penampungan tersebut kurang. Sehingga kadang-kadang diperlukan suatu mekanisme pengukur ketinggian permukaan air secara otomatis, salah satunya dengan membuat semacam sensor pengukur ketinggian air. Sensor ini kemudian dipasangkan pada penampung air teresebut. Tampilan untuk melihat hasil pengukuran sensor tersebut tidak perlu dekat dengan sensor, dapat ditempatkan di tempat lain sesuai kebutuhan, sehingga hasil pengukuran dapat dilihat setiap saat dengan mudah.
Pada prinsipnya dengan mengukur selisih ketinggian antara batas tinggi maksimal permukaan air dengan posisi ketinggian pelampung maka tinggi permukaan air dapat diketahui. Untuk mengukur selisih ketinggian antara tinggi maksimal permukaan air dengan posisi ketinggian pelampung digunakan sensor pengukur jarak, karena selisih ketinggian antara tinggi maksimal permukaan air dengan posisi ketinggian pelampung adalah sama dengan jarak antara batas maksimal permukaan air dengan posisi pelampung yang akan diukur. Sehingga dengan menempatkan sensor pengukur jarak pada posisi batas maksimal ketinggian air, maka jarak yang terukur antara sensor dengan pelampung adalah sama dengan selisih ketinggian air maksimum dengan ketinggian pelampung. Jika ketinggian air maksimum adalah tetap dan pasti nilainya, maka dengan mengurangkan nilai tersebut dengan nilai selisih ketinggian pelampung, maka ketinggian air dapat diketahui. Ketika ketinggian air sudah sesuai diharapkan maka keran tempat keluar masuk air tersebut di kontrol dengan menggunakan suatu sistem logika.
Oleh karena itu, peneliti tertarik melakukan penelitian yang dituangkan dalam skripsi dengan judul " PENGENDALIAN LEVEL KETINGGIAN AIR
MENGGUNAKAN ADAPTIVE NEURO FUZZY INTERFERENCE SYSTEM
(ANFIS)".
1.2 Maksud dan Tujuan
Maksud dari pembuatan tugas akhir ini adalah untuk membuat perangkat keras pengatur level ketinggian air dengan menggunakan sistem kendali yang dikenal dengan sistem ANFIS. Sedangkan perancangan program menggunakan software LabVIEW.
1.3 Rumusan Masalah
Permasalahan dalam pembuatan tugas akhir ini adalah
1. Bagaimana agar dapat mengotrol perputaran motor stepper berdasarkan sensor infrared object detector sebagai pendeteksi level ketinggian air. 2. Ketepatan pembacaan ADC.
3. Memonitor level ketinggian air menggunakan software LabVIEW. 4. Penggunaan logika ANFIS pada software LabVIEW.
1.4 Batasan Masalah
Ada beberapa batasan masalah dalam pengendalian ini yaitu :
1. Menggunakan sensor infrared object detector yang kemudian dipakai untuk mengendalikan motor stepper.
1.5 Metodologi Penelitian
Untuk menyelesaikan Tugas Akhir ini, penulis menggunakan teknik atau langkah–langkah sebagai berikut :
1. Studi literatur dan pustaka.
Teknik ini merupakan pengumpulan dasar teori dari sistem yang akan dibuat, sehingga sistem tersebut dapat dianalisa.
2. Perancangan sistem.
Teknik yang kedua adalah melakukan perancangan dan pembuatan perangkat lunak dan perangkat keras.
3. Pengujian alat dan analisa.
Teknik ini bertujuan untuk menganalisa dan menguji perangkat lunak dan perangkat keras yang telah dirancang.
1.6 Sistematika Penulisan
Untuk mengetahui gambaran mengenai penulisan tugas akhir ini, maka di bawah ini akan dijelaskan mengenai sistematika penulisan tugas akhir adalah sebagai berikut :
BAB I PENDAHULUAN
BAB II DASAR TEORI
Bab ini berisi teori-teori yang menunjang dalam pembuatan dan perancangan sistem, sebagai acuan dalam pembuatan perangkat keras dan perangkat lunak.
BAB III PERANCANGAN SISTEM
Bab ini menguraikan tentang perancangan dan implementasi dari sistem yang dibangun, yang meliputi proses pembuatan hardware dan software.
BAB IV ANALISA DAN PENGUJIAN SISTEM
Bab ini berisi tentang analisa serta pengujian dari sistem yang telah dibuat. BAB V KESIMPULAN DAN SARAN
BAB II
DASAR TEORI
2.1 Pengenalan LabVIEW
LabVIEW adalah sebuah software pemograman yang diproduksi oleh National Instruments. Seperti bahasa pemograman lainnya yaitu C++, matlab atau visual basic , LabVIEW juga mempunyai fungsi dan peranan yang sama, perbedaannya adalah LabVIEW menggunakan bahasa pemrograman berbasis grafis atau blok diagram sedangkan bahasa pemrograman lainnya menggunakan text. Program LabVIEW dikenal dengan sebutan VI atau virtual instruments karena penampilan dan operasinya dapat meniru sebuah instrument. Pada LabVIEW, user pertama-tama membuat user interface atau front panel dengan menggunakan kontrol dan indikator, yang dimaksud dengan kontrol adalah knobs, push buttons, dials dan peralatan input lainnya sedangkan yang dimaksud dengan indikator adalah graphs, LEDs dan peralatan display lainnya. Setelah menyusun user interface, lalu user menyusun blok diagram yang berisi kode-kode VIs untuk mengontrol front panel. Software LabVIEW terdiri dari tiga komponen utama, yaitu:
2.1.1 Front Panel
Gambar 2.1 Front Panel
2.1.2 Blok Diagram
Blok diagram adalah bagian window yang berlatar belakang putih berisi source code yang dibuat dan berfungsi sebagai instruksi untuk front panel. Tampilan dari blok diagram dapat lihat pada gambar 2.2.
2.1.3 Control dan Function Pallete
Control dan function pallete digunakan untuk membangun sebuah VI. a. Control pallete
Control pallete merupakan tempat beberapa control dan indikator pada front panel, control pallete hanya tersedia di front panel, untuk menampilkan control pallete dapat dilakukan dengan mengklik windows >> show control pallete atau klik kanan pada front panel. Contoh control pallete ditunjukkan pada gambar 2.3.
Gambar 2.3 Control Palette
b. Function pallete
Gambar 2.4 Function Pallete
2.2 Adaptive Neuro-Fuzzy Interference System (ANFIS)
Adaptive Neuro-Fuzzy Interference System (ANFIS) merupakan jaringan adaptif yang berbasis pada sistem kesimpulan fuzzy (fuzzy interference system). Dengan penggunaan suatu prosedur hybrid learning, ANFIS dapat membangun suatu mapping input-output yang keduanya berdasarkan pada pengetahuan manusia (pada bentuk aturan fuzzy if-then) dengan fungsi keanggotaan yang tepat. Sistem kesimpulan fuzzy yang memanfaatkan aturan fuzzy if-then dapat memodelkan aspek pengetahuan manusia yang kwalitatif dan memberi reasoning processes tanpa memanfaatkan analisa kwantitatif yang tepat. Ada beberapa aspek dasar dalam pendekatan ini yang membutuhkan pemahaman lebih baik, secara rinci:
b. Ada suatu kebutuhan bagi metoda efektif untuk mengatur (tuning) fungsi keanggotaan (membership function/MF) untuk memperkecil ukuran kesalahan keluaran atau memaksimalkan indeks pencapaian.
ANFIS dapat bertindak sebagai suatu dasar untuk membangun satu kumpulan aturan fuzzy if-then dengan fungsi keanggotaan yang tepat, yang berfungsi untuk menghasilkan pasangan input-output yang tepat.
2.2.1 Aturan FuzzyIf-Then
Pernyataan aturan fuzzy if-then atau fuzzy conditional adalah ungkapan dengan format IF A THEN B, di mana A dan B adalah label dari himpunan fuzzy yang ditandai oleh fungsi keanggotaan yang sesuai. Dalam kaitan dengan formatnya, aturan fuzzy if-then sering digunakan untuk menangkap “mode” yang tidak tepat dalam memberi alasan yang digunakan dalam kemampuan manusia untuk membuat keputusan dalam suatu lingkungan yang tidak pasti dan tidak tepat.
Suatu contoh yang menguraikan fakta sederhana adalah
If pressure is high, then volume is small
Melalui penggunaan fungsi keanggotaan dan label bahasa, suatu aturan fuzzy if-then dapat dengan mudah menangkap “peraturan utama” yang digunakan oleh manusia.
2.2.2 Sistem Kesimpulan Fuzzy
Pada dasarnya suatu sistem kesimpulan fuzzy terdiri atas 5 (lima) blok fungsional (blok diagram fuzzy interference system) digambarkan pada gambar di bawah :
Gambar 2.5 Sistem Fuzzy
Sebuah aturan dasar (rule base) yang berisi sejumlah aturan fuzzy if-then
Suatu database yang menggambarkan fungsi keanggotaan dari himpunan fuzzy yang digunakan pada aturan fuzzy.
Suatu unit pengambilan keputusan (decision making-unit) melakukan operasi interference (kesimpulan) terhadap aturan.
Suatu fuzzification interface mengubah bentuk masukan derajat crisp atau tingkat kecocokan dengan nilai bahasa.
Sistem inferensi fuzzy yang digunakan adalah sistem inferensi fuzzy model Tagaki-Sugeno-Kang (TSK) orde satu dengan pertimbangan kesederhanaan dan kemudahan komputasi.
Rule 1 : if x is A1 and y is B1 then z1 = ax + by + c
premis konsekuen
Rule 2 : if x is A2 and y is B2 then z2 = px + qy + r
premis konsekuen
Input adalah x dan y. Konsekuen adalah z.
Langkah dari fuzzyreasoning dilakukan oleh sistem kesimpulan fuzzy adalah:
Gambar 2.6 Fuzzy Reasoning
2.2.3 Jaringan Adaptif: Arsitektur dan Algoritma Pembelajaran
Sesuai dengan namanya, jaringan adaptif merupakan suatu struktur jaringan yang terdiri dari sejumlah simpul yang terhubung melalui penghubung secara langsung (directional links). Tiap simpul menggambarkan sebuah unit proses, dan penghubung antara simpul menentukan hubungan kausal antara simpul yang saling berhubungan. Semua atau sebagian simpul bersifat adaptif (bersimbol kotak) dapat dilihat pada gambar 2.7, yang artinya keluaran dari simpul tersebut bergantung pada parameter peubah yang mempengaruhi simpul itu.
2.2.4 Arsitektur ANFIS
Gambar 2.8 Arsitektur ANFIS
Simpul-simpul (neuron-neuron) pada arsitektur ANFIS (gambar 2.8): Nilai-nilai (Membership function).
Aturan- aturan (T-norm yang berbeda, umumnya yang digunakan operasi product).
Fungsi-fungsi (Regresi linier dan pengalian dengan ). Output (Penjumlahan aljabar).
Simpul-simpul tersebut dibentuk dalam arsitektur ANFIS yang terdiri dari 5 (lima) lapis. Fungsi dari setiap lapis tersebut sebagai berikut:
a. Lapis 1
Setiap simpul i pada lapis 1 adalah simpul adaptif dengan nilai fungsi simpul sebagai berikut:
O1,i = µAi (X) untuk i=1,2 ……… (2.1)
O1,i = µAi (X) untuk j=1,2 ……… (2.2)
dengan : x dan y adalah masukan simpul ke i.
Ai(x) dan Bj(y) adalah label linguistik yang terkait dengan simpul tersebut.
O1,i dan O1,j adalah derajat keanggotaan himpunan fuzzy A1, A2, atau B1, B2.
Fungsi keanggotaan untuk A atau B dapat diparameterkan, misalnya fungsi segitiga:
Gambar 2.9 Fungsi Keangotaan Triangel
b. Lapis 2
Setiap simpul pada lapis ini adalah simpul tetap berlabel ∏ dengan keluarannya adalah produk dari semua sinyal yang datang.
O2,i = µAi (X) x µBi (X), I = 1,2; ……… (2.4)
Setiap keluaran simpul dari lapis ini menyatakan kuat penyulutan (fire strength) dari tiap aturan fuzzy. Fungsi ini dapat diperluas apabila bagian premis memiliki lebih dari dua himpunan fuzzy. Banyaknya simpul pada lapisan ini menunjukkan banyaknya aturan yang dibentuk. Fungsi perkalian yang digunakan adalah interpretasi operator and.
c. Lapisan 3
Setiap simpul pada lapis ini adalah simpul tetap berlabel N. Simpul ini menghitung rasio dari kuat penyulutan atau fungsi derajat pengaktifan aturan ke i pada lapisan sebelumnya terhadap jumlah semua kuat penyulut dari semua aturan pada lapisan sebelumnya.
……… (2.5)
Keluaran lapis ini disebut kuat penyulut ternormalisasi. d. Lapis 4
Setiap simpul pada lapis ini adalah simpul adaptif dengan fungsi simpul:
……… (2.6)
dengan: wi adalah kuat penyulut ternormalisasi dari lapis 3. parameter
{pix + qiy + ri} ……… (2.7)
e. Lapis 5
Simpul tunggal pada lapis ini adalah simpul tetap dengan label Σ yang
menghitung keluaran keseluruhan sebagai penjumlahan semua sinyal yang datang dari lapisan 4.
……… (2.8)
Jaringan adaptif dengan lima lapisan diatas ekivalen dengan sistem inferensi fuzzy Takagi–Sugeno–Kang (TSK) atau yang lebih dikenal dengan Sugeno.
2.3 ADC ( Analog to Digital Converter )
lebih singkat dan tidak tergantung pada nilai masukan analognya atau sinyal yang akan diubah. Pada gambar 2.10 memperlihatkan diagram blok ADC tersebut.
Gambar 2.10 Diagram Blok ADC
Gambar 2.11 ADC 0804
Pada gambar 2.11 IC ADC 0804 mempunyai dua input analog, Vin(+) dan
Vin(-), sehingga dapat menerima input diferensial. Input analog sebenarnya (Vin)
sama dengan selisih antara tegangan-tegangan yang dihubungkan dengan ke dua pin input yaitu = ( )− ( ). Kalau input analog berupa tegangan
tunggal, tegangan ini harus dihubungkan dengan ( ) sedangkan ( )
ditanahkan. Untuk operasi normal, ADC 0804 menggunakan = +5 Volt sebagai referens. Dalam hal ini jangkauan input analog mulai dari 0 Volt sampai 5 Volt (skala penuh), karena IC ini adalah SAC 8-bit, maka resolusinya adalah sebagai berikut :
= = = 19.6 ….. (2.9)
dimaksudkan untuk mengubah data tegangan yang dihasilkan oleh rangkaian sensor menjadi data digital agar dapat dieksekusi oleh rangkaian mikrokontroler.
2.3.1 Mode Operasi ADC 0804
Ada beberapa mode operasi yang dapat dilakukan oleh ADC 0804 yaitu : a. Mode operasi kontinyu
Agar ADC 0804 dapat dioperasikan pada mode operasi kontinyu (proses membaca terus menerus dan tanpa proses operasi jabat tangan), maka penyemat CS dan RD dihubungkan ke ground, sedangkan penyemat WR dan INTR tidak dihubungkan kemanapun. Prinsip kerja operasi kontinyu ini yaitu ADC akan memulai konversi ketika INTR kembali tidak aktif (logika ‘1’). Setelah proses konversi selesai, INTR akan aktif (logika ‘0’). Untuk memulai konversi pertama kali WR harus di-ground-kan terlebih dahulu, hal ini digunakan untuk me-reset SAR. Namun pada konversi berikutnya untuk me-reset SAR dapat menggunakan sinyal INTR saat aktif (logika ‘0’) dan mulai konversi saat tidak aktif (logika ‘1’). Ketika selesai konversi data hasil konversi akan dikeluarkan secara langsung dari buffer untuk dibaca karena RD di-ground-kan. Saat sinyal INTR aktif, sinyal ini digunakan untuk me-reset SAR. Saat INTR kembali tidak aktif (logika ‘1’) proses konversi dimulai kembali.
b. Mode Operasi Hand-Shaking
konversi segera dimulai. Selama konversi sedang berlangsung, sinyal INTR akan tidak aktif (berlogika ‘1’) sedangkan saat konversi selesai ditandai dengan aktifnya sinyal INTR (logika‘0’). Setelah proses konversi selesai data hasil konversi tetap tertahan pada buffer ADC. Data hasil konversi tersebut akan dikeluarkan dengan mengirim sinyal RD berlogika ‘0’. Setelah adanya sinyal sinyal RD ini, maka sinyal INTR kembali tidak aktif.
2.4 Motor Stepper
Motor stepper adalah alat yang mengubah pulsa listrik yang diberikan menjadi gerakan motor discret (berlainan) yang disebut step (langkah). Satu putaran motor memerlukan 360 derajat dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik. Motor stepper mempunyai kecepatan dan torsi yang rendah namun memiliki kontrol gerakan posisi yang cermat, hal ini dikarenakan motor stepper memiliki beberapa segment kutub kumparan. Gambar dari motor stepper terlihat pada gambar 2.12.
Pada dasarnya ada dua jenis motor stepper yaitu bipolar dan unipolar. Sebuah motor stepper akan berputar 1 (satu) step apabila terjadi perubahan arus pada koil-koilnya, mengubah pole-pole magnetik disekitar pole-pole stator. Perbedaan utama antara bipolar dan unipolar adalah :
a. Bipolar :
Arus pada koil dapat berbolak-balik untuk mengubah arah putaran motor.
Lilitan motor hanya satu dan dialiri arus dengan arah bolak-balik. b. Unipolar :
Arus mengalir satu arah, dan perubahan arah motor tergantung dari lilitan (koil) yang dialiri arus.
Lilitan terpisah dalam dua bagian dan masing-masing bagiannya hanya dilewati arus dalam satu arah saja.
Kelemahan jenis bipolar adalah bahwa rangkaian drivernya lebih kompleks, karena harus dapat menglirkan arus dalam dua arah melalui koil yang sama. Sedangkan jenis unipolar, selain motor stepper tersebut lebih mudah diperoleh di pasaran juga memerlukan rangkaian driver yang lebih sederhana.
stepping , maka pada mode half stepping motor dapat digerakkan sebesar 0.9 derajat atau step. Pengaturan kutub-kutub motor dan proses gerak motor stepper dapat dilihat melalui contoh tabel 2.1, tabel 2.2 dan tabel 2.3.
Tabel 2.1 Mode Full Step Motor Stepper A
Fasa
Kutub
Proses
A B C D
1 ON ON OFF OFF
2 OFF ON ON OFF
4 ON OFF OFF ON
Tabel 2.2 Mode Full Step Motor Stepper B
Fasa
Kutub
Proses
A B C D
1 ON OFF OFF OFF
2 OFF ON OFF OFF
4 OFF OFF OFF ON
Tabel 2.3 Mode Half Step Motor Stepper B
Fasa
Kutub
Proses
A B C D
1 ON OFF OFF OFF
2 ON ON OFF OFF
4 OFF ON ON OFF
5 OFF OFF ON OFF
6 OFF OFF ON ON
7 OFF OFF OFF ON
2.5 Infrared Object Detector
Dalam pembuatan tugas akhir ini, sensor yang digunakan adalah sensor GP2D12. Sensor Sharp GP2D12 ini merupakan sensor deteksi jarak Infra-Red dengan keluaran tegangan analog.
Gambar 2.13 Sharp GP2D12 dan Kabel Pin
Blok diagram dari Sharp GP2D12 berisi led pemancar dan penerima yang memiliki rangkaian pemroses, pengemudi, dan rangkaian osilasi serta rangkaian outputanalog seperti gambar berikut:
Sensor ini mempunyai output sensor 3 kabel yang terdiri dari (gambar 2.13) : Pin A sebagai tegangan output (Vo)
Pin B, GND Pin C, Vcc
Sensor Sharp GP2D12 mendeteksi bacaan terus menerus ketika diberi daya. Outputnya berupa tegangan analog yang sesuai dengan jarak yang diukur. Jarak yang bisa dideteksi oleh sensor GP2D12 mulai dari 8cm sampai 80cm. Nilai output tersebut akan terus diperbaharui setiap 32 ms. Berdasarkan pengukuran, tegangan yang dihasilkan pada jarak 10cm ialah 2.6V, dan menurun tidak secara linear pada jarak 80 cm beriksar pada tegangan 0.5 V. Sehingga dengan kata lain jarak berbanding terbalik dengan tegangan, jadi tegangan akan semakin tinggi pada saat jarak semakin dekat.
2.6 Transistor TIP 122
Transistor TIP 122 merupakan jenis transistor NPN, pada proyek tugas akhir ini transistor TIP 122 digunakan sebagai driver motor stepper, agar TIP 122 dapat digunakan sebagai driver motor stepper, maka TIP 122 harus rangkai secara darlington. Rangkaian darlington adalah rangkaian elektronika yang terdiri dari sepasang transistor bipolar (dua kutub) yang tersambung secara seri. Sambungan seri ini digunakan sebagai penguatan yang tinggi, karena hasil penguatan pada transistor pertama akan dikuatkan lebih lanjut oleh transistor kedua. Datasheet dari transistor NPN TIP 122 terlihat seperti gambar 2.16.
Gambar 2.16 Transitor TIP 122
2.7 IC Regulator
[image:30.612.246.387.331.440.2]biasa seperti 7805 arus output antara 500 mA sampai dengan 1 A, gambar 2.17 menunjukkan susunan kaki dari IC 7805 dan 7812.
Gambar 2.17 Susunan Kaki IC 7805 dan 7812
2.8 Penguat Operasional
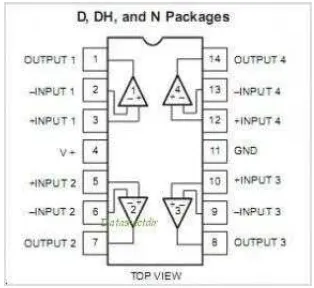
Penguat operasional (bahasa Inggris: operational amplifier) atau yang biasa disebut op-amp merupakan suatu jenis penguat elektronika dengan sambatan (bahasa Inggris: coupling) arus searah yang memiliki bati (faktor penguatan atau dalam bahasa Inggris: gain) sangat besar dengan dua masukan dan satu keluaran. Penguat operasional pada umumnya tersedia dalam bentuk sirkuit terpadu dan pada proyek tugas akhir ini op-amp yang dipakai adalah LM324N.
[image:31.612.227.412.140.268.2] [image:31.612.241.398.541.685.2]Penguat operasional adalah perangkat yang sangat efisien dan serba guna. Contoh penggunaan penguat operasional adalah untuk operasi matematika sederhana seperti penjumlahan dan pengurangan terhadap tegangan listrik hingga dikembangkan kepada penggunaan aplikatif seperti komparator dan osilator dengan distorsi rendah.
Penguat operasional dalam bentuk rangkaian terpadu memiliki karakteristik yang mendekati karakteristik penguat operasional ideal tanpa perlu memperhatikan apa yang terdapat di dalamnya. Karakteristik penguat operasional ideal adalah:
1. Bati tegangan tidak terbatas. 2. Impedansi masukan tidak terbatas. 3. Impedansi keluaran nol.
4. Lebar pita tidak terbatas.
5. Tegangan ofset nol (keluaran akan nol jika masukan nol).
Gambar 2.19 Simbol Penguat Operasional
Simbol penguat operasional pada rangkaian seperti pada gambar 2.19, di mana:
[image:32.612.268.381.476.540.2]3. : keluaran
4. : catu daya positif 5. : catu daya negative
Catu daya pada notasi penguat operasional seringkali tidak dicantumkan untuk memudahkan penggambaran rangkaian.
Terdapat banyak sekali penggunaan dari penguat operasional dalam berbagai
jenis sirkuit listrik. Oleh karena itu, pada tugas akhir ini hanya memakai penguat
operasional sebagai buffer. Rangkaian buffer adalah rangkaian yang inputnya sama dengan hasil outputnya. Dalam hal ini seperti rangkaian common colektor yaitu berpenguatan = 1. Rangkaiannya seperti pada gambar berikut ini
Gambar 2.20 Rangkaian Buffer
Nilai R yang terpasang gunanya untuk membatasi arus yang di keluarkan. Besar nilainya tergantung dari indikasi dari komponennya, biasanya tidak dipasang alias arus dimaksimalkan sesuai dengan kemampuan op-ampnya.
2.9 Multiplekser
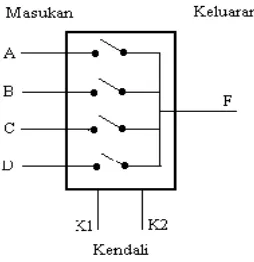
[image:33.612.255.393.380.474.2]dilakukan melalui masukan penyeleksi. Secara bagan kerja Multiplekser ditunjukkan pada gambar 2.21.
Gambar 2.21 Bagan Multiplekser
[image:34.612.259.386.142.273.2]Kendali pada Multiplekser akan memilih saklar mana yang akan dihubungkan. Saluran kendali sebanyak "n" saluran dapat menyeleksi 2n saluran masukan. Sebagai contoh: sebuah Multiplekser 4 ke 1 dengan Kendali K1 dan K2. Ketika saluran Enable = 1, keluaran selalu bernilai nol. Tetapi ketika saluran Enable = 0, keluaran F diatur melalui K1 dan K2. Tabel kebenaran Multiplekser ini dinyatakan seperti terlihat pada tabel 2.4.
Tabel 2.4 Tabel Kebenaran Multiplekser
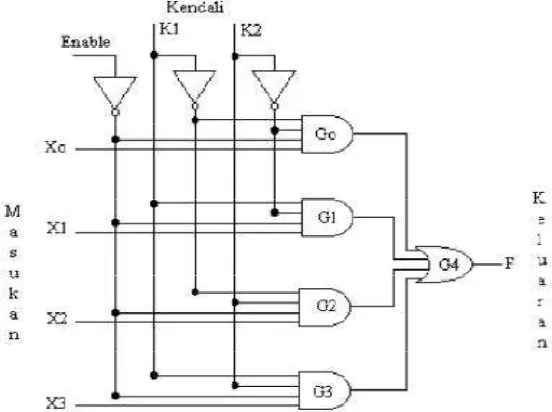
[image:34.612.220.420.544.630.2]F = E.Xo.K1.K2 + E.X1.K1.K2 + E.X2.K1.K2 + E.X3.K1.K2…… (2.10)
Berdasarkan persamaan 2.10 disusunlah rangkaian logika Multiplekser 4 ke1 seperti ditunjukkan oleh gambar 2.22.
Gambar 2.22 Rangkaian Logika Multiplekser 4 ke 1
2.10 Komunikasi Paralel
[image:35.612.187.463.180.386.2]kita beri high, maka tegangannya akan berubah menjadi 5 volt. Pada perancangan alat, komunikasi paralel hanya digunakan untuk mengeluarkan data, yang bisa berguna untuk menyalakan relay atau motor stepper untuk menjalankan atau mengontrol hardware. Pada port paralel ada tiga jalur data yaitu :
1. Jalur kontrol memiliki arah bidirectional.
2. Jalur kontrol memiliki satu arah yaitu : arah keluaran.
3. Jalur data, memiliki 2 arah. Dapat juga berfungsi sebagai pengirim Address dan data, masing-masing 8 bit, dimana keduanya melakukan transfer data dengan protokol handshaking serta diakses dengan register yang berbeda. Bila kita menggunakan jalur LPT1 maka base address biasanya dalam bentuk hexadesimal , seperti 278, 378 atau 3BC, seperti terlihat pada tabel 2.5.
Tabel 2.5 Base Address
Ragister kontrol Register status Register data Register address
37A 379 378 37B
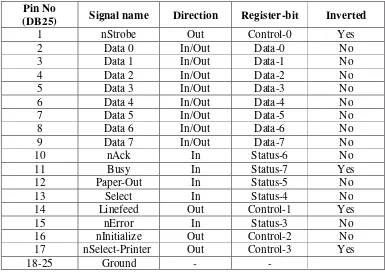
Tabel 2.6 Fungsi pin – pin DB 25
Pin No
(DB25) Signal name Direction Register-bit Inverted
1 nStrobe Out Control-0 Yes
2 Data 0 In/Out Data-0 No
3 Data 1 In/Out Data-1 No
4 Data 2 In/Out Data-2 No
5 Data 3 In/Out Data-3 No
6 Data 4 In/Out Data-4 No
7 Data 5 In/Out Data-5 No
8 Data 6 In/Out Data-6 No
9 Data 7 In/Out Data-7 No
10 nAck In Status-6 No
11 Busy In Status-7 Yes
12 Paper-Out In Status-5 No
13 Select In Status-4 No
14 Linefeed Out Control-1 Yes
15 nError In Status-3 No
16 nInitialize Out Control-2 No
17 nSelect-Printer Out Control-3 Yes
18-25 Ground - -
Port paralel dapat mentransmisi 8 bit data dalam sekali detak. Tata-letak dari ke-dua puluh lima pin (DB 25) parallel printer port, diperlihatkan dalam gambar 2.23.
PERANCANGAN SISTEM
3.1 Gambaran Umum Sistem
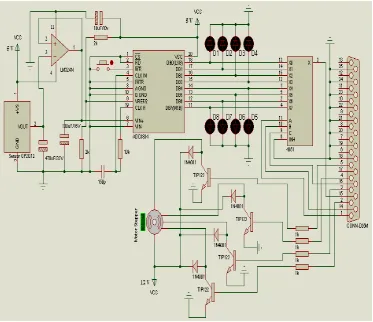
[image:38.612.132.479.243.466.2]Gambaran umum dari sistem pengendalian level ketinggian air dapat dilihat dalam blok diagram di bawah ini :
Gambar 3.1 Blok Diagram Sistem Level Tinggi Air
Berdasarkan blok diagram keseluruhan sistem (gambar 3.1) dapat dijelaskan sebagai berikut :
a. Jarak obyek dengan sensor dapat dihitung dengan mengukur besarnya tegangan output pada sensor InfraRed Object Detector. Output dari sensor adalah berupa tegangan. Semakin dekat jarak obyek dengan sensor maka semakin tinggi pula tegangan yang dikeluarkan oleh output sensor.
LAM PU LED Sensor
Infrared Object Det ect or (Sharp GP2D12)
ADC 0804 M ult iplekser
PC (ANFIS)
Driver M ot or M ot or
Besarnya tegangan pada output sensor akan diperbarui secara terus-menerus kira-kira setiap 32ms sekali.
b. Data sensor tersebut kemudian masuk ke rangkaian buffer, agar menghindari tegangan balik dari ADC.
c. Kemudian tegangan output sensor tersebut diumpankan ke modul ADC 0804 agar data analog bisa diubah menjadi sinyal keluaran digital. Setelah output sensor sudah diumpankan ke ADC 0804 maka output tersebut dikirim ke multiplekser dengan tujuan agar keluaran menjadi satu keluaran.
d. Kemudian data dari multiplekser dikirim menggunakan komunikasi parallel (DB25) ke PC (Personal Computer) agar dapat diolah dan diproses menggunakan software LabVIEW.
e. Data yang sudah diolah oleh PC (Personal Computer) kemudian dikirim kembali menggunakan kabel DB 25 yang kemudian dipergunakan untuk mengontrol motor stepper (untuk mengontrol motor stepper harus membuat rangkaian driver terlebih dahulu).
3.2 Perancangan Sistem
Agar tujuan dari perancangan sistem ini berjalan sesuai yang diharapkan yaitu mengendalikan level tinggi air menggunakan Adaptif Neuro-Fuzzy Interference System (ANFIS) maka ada dua hal yang harus direalisasikan yaitu :
2. Perancangan perangkat lunak dengan memanfaatkan software LabVIEW. Sistem pengontrolan yang dilakukan adalah sistem ANFIS.
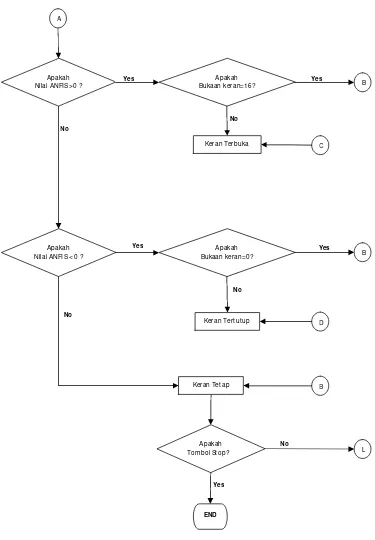
[image:40.612.135.508.263.585.2]Berdasarkan dua tujuan perancangan sistem di atas maka dibuat suatu rangkaian keseluruhan dari sistem tersebut dan flowchart sistem. Rangkaian dan flowchart sistem dapat dilihat pada gambar 3.2 dan 3.3.
Yes Yes
No No
Yes
No No
Yes
Tangki = Sensor - 40
ANFIS
Apakah Tangki = Set Point
Dan Nilai ANFIS = 0 ? Jika nilai ANFIS >= 0.5 m aka nilai ANFIS - 0.5,
Jika nilai ANFIS <= 0.5 m aka nilai ANFIS + 0.5
Apakah Tangki > 30
Scan Sensor
Scan Set Point
Input 1 = Set Point + 2
Nilai ANFIS = -1 Nilai ANFIS = 1
Nilai ANFIS = Nilai ANFIS L
START
Scan bukaan Keran (0 sam pai 16)
Apakah Bukaan keran=16?
Scan bukaan Keran (0 sam pai 16) Scan bukaan Ker an
(0 sam pai 16)
Apakah Bukaan keran=0? A
C
B B
Gambar 3.3 Flowchart Program No No Yes Yes Apakah Nilai ANFIS >0 ?
Yes
No
Apakah Nilai ANFIS < 0 ?
Yes No Yes No END Apakah
Tom bol St op? L
Ker an Ter t utup
Keran Tet ap Apakah Bukaan keran=16? Apakah Bukaan keran=0? A C B D B B
3.3 Perancangan Perangkat Keras ( Hardware )
Dalam perancangan perangkat keras ini akan dibuat beberapa perangkat keras yang mendukung untuk pengendalian level ketinggian air, yaitu meliputi :
a. Sensor level ketinggian yang menggunakan Infrared Object Detector (Sharp GP2D12) .
b. Rangkaian Buffer yang digunnakan untuk menstabilkan keluaran sensor Sharp GP2D12.
c. Rangkaian ADC 0804 digunakan untuk mengubah data analog dari sensor menjadi data digital.
d. Multiplekser digunakan untuk mengubah banyak data atau sinyal menjadi satu data yang akan dikeluarkan pada satu output.
e. Rangkaian driver motor stepper.
f. Penggunaan connector DB 25 sebagai interface antara perangkat keras dengan komputer.
g. Rangakaian catu daya sebagai suplay tegangan.
3.3.1 Infrared Object Detector (Sharp GP2D12)
[image:43.612.270.371.576.667.2]Jarak obyek dengan sensor dapat dihitung dengan mengukur besarnya tegangan output pada sensor InfraRed Object Detector.
Gambar 3.5 Desain Sensor Tinggi Level Air
[image:44.612.238.406.79.240.2]Output dari sensor adalah berupa tegangan. Semakin dekat jarak obyek dengan sensor maka semakin tinggi pula tegangan yang dikeluarkan oleh output sensor. Besarnya tegangan pada output sensor akan diperbarui secara terus-menerus kira-kira setiap 32ms sekali. Perubahan tegangan output sensor terhadap perubahan jarak obyek adalah tidak linier, seperti yang terdapat pada gambar 3.6, yaitu grafik respon sensor, yaitu grafik yang menunjukkan besarnya tegangan output sensor sesuai dengan jarak obyek yang terukur. Sedangkan blok diagram internal sensor terdapat pada gambar 3.7.
Gambar 3.7 Blok Diagram Internal Sensor
3.3.2 Rangkaian Buffer
Rangkaian buffer adalah rangkaian yang inputnya sama dengan hasil outputnya. Op-amp yang dipakai adalah LM324N dan rangkaiannya seperti pada gambar berikut ini
Gambar 3.8 Rangkaian Buffer
3.3.3 Analog to Digital Converter (IC ADC 0804)
biner. Untuk menghasilkan keluaran biner ini diperlukan suatu converter dalam hal ini ADC 0804 mampu melakukannya.
Dalam fungsinya ada beberapa jenis ADC, yang masing-masing mempunyai kelebihan, berdasarkan pada metode pengubahan isyarat analog ke digital ADC dibedakan menjadi :
1. Metode Pencacah (Counting)
2. Metode DualSlope atau ratiometrik
3. Metode pendekatan berurutan (SuccessiveApproximation / SAC) 4. Metode Pendekatan paralel (Paralel-Comparator)
Untuk menentukan ADC yang digunakan dalam sistem akuisisi data ada beberapa hal yang perlu diperhatikan yaitu :
1. Kecepatan konversi 2. Resolusi
3. Rentang masukan analog maksimum 4. Jumlah kanal masukan
itu, dengan pertimbangan diatas penulis sengaja memilih ADC 0804 sebagai konverter analog ke digital.
IC ADC 0804 mempunyai masukan analog, Vin (+) dan Vin (-), sehingga dapat menerima masukan diferensial. Masukan analog sebenarnya (Vin) sama dengan selisih antara tegangan-tegangan yang dihubungkan dengan ke dua pin masukan yaitu Vin= Vin (+) – Vin (-). Kalau masukan analog berupa tegangan tunggal, tegangan ini harus dihubungkan dengan Vin (+), sedangkan Vin (-) digroundkan. Pada tugas akhir ini, ADC 0804 menggunakan Vcc = +5 Volt dan tegangan referensi adalah 5 Volt. Dalam hal ini jangkauan masukan analog mulai dari 0 Volt sampai 5 Volt (skala penuh), karena IC ini adalah SAC 8-bit, resolusinya akan sama dengan :
= = = 2 ……….. (3.1)
(n menyatakan jumlah bit keluaran biner IC analog to digital converter)
IC ADC 0804 memiliki generator clock intenal yang harus diaktifkan dengan menghubungkan sebuah resistor eksternal (R) antara pin CLK OUT dan CLK IN serta sebuah kapasitor eksternal (C) antara CLK IN dan ground digital. Frekuensi clock yang diperoleh di pin CLK OUT sama dengan :
Gambar 3.9 Pin IC ADC 0804
Keterangan pada masing-masing pin pada IC ADC 0804 adalah:
1. Pin 1-3 (CS, RD, WR) Merupakan masukan kontrol digital dengan level tegangan logika TTL. Pin CS dan RD jika tidak aktif maka keluaran digital akan berada pada keadaan impedansi tinggi. Pin WR bila dibuat aktif bersamaan dengan CS akan memulai konversi. Konversi akan reset bila WR dibuat tidak aktif. Konversi dimulai setelah WR berubah menjadi aktif.
2. Pin 4 dan 19 (clock IN dan clock R). Merupakan pin masukan dari rangkaian schmit trigger. Pin ini digunakan sebagai clock internal dengan menambah rangkaian RC.
3. Pin 5 (INTR) Merupakan pin interupsi keluaran yang digunakan didalam sistem mikroprosesor. Pin 5 menunjukkan bahwa konversi telah selesai. Pin 5 akan mengeluarkan logika tinggi bila konversi dimulai dan mengeluarkan pin rendah bila konversi selesai.
dengan ground, dan Vin (+) digunakan untuk masukan positif jika Vin (-) dihubungkan ground.
5. Pin 8 dan 10 (AGND dan DGND) Pin ini dihubungkan dengan ground. 6. Pin 9 (Vref/2) Merupakan pin masukan tegangan referensi yang digunakan
sebagai referensi untuk tegangan masukan dari pin 6 dan 7.
7. Pin 11 sampai 18 (bus data 8 bit) Merupakan jalur keluaran data digital 8 bit. Pin 11 merupakan data MSB dan pin 18 merupakan data LSB.
8. Pin 20 (V+) Pin ini dihubungkan ke VCC (5volt).
Gambar 3.10 Rangkaian IC ADC0804
3.3.4 Multiplekser
Gambar 3.11 Skema IC Multiplekser CD4051
[image:50.612.248.392.85.176.2]Input pada multiplekser merupakan output dari ADC yang kemudian diberikan pada kaki 13, 14, 15, 12, 1, 5, 2 dan 4, hal ini ditunjukkan pada gambar 3.12 rangkaian multiplekser. Output akan diperoleh dari kaki 3 dan sinyal yang dikeluarkan pada output ditentukan oleh input A, B, C pada kaki 11, 10 dan 9. Proses pengontrolan output tersebut sesuai tabel 3.1 Pengontrol Output Multiplekser.
Tabel 3.1 Pengontrol Output Multiplekser
INPUT STATES “ON”
CHANNELS
INHIBIT C B A
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 * * * None
Gambar 3.12 Rangkaian Multiplekser
3.3.5 Driver Motor Stepper
[image:51.612.190.450.80.316.2]Gambar 3.13 Rangkaian Motor Stepper Driver
3.3.6 Rangkaian Catu Daya
[image:52.612.135.507.80.281.2]Gambar 3.14 Rangkaian Catu Daya
3.3.7 Komunikasi Data Parallel
PC (Perconal Computer) memiliki suatu koneksi yang disebut dengan parallel port. Pada dasarnya parallel port ini sering digunakan untuk koneksi printer. Tetapi semakin perkembangan teknologi, parallel port ini dapat digunakan sebagai output dan input sistem.
Pada keadaan normal (tidak aktif) tegangankan yang dikekuarkan adalah 0 volt, sedangkan jika pada saat kondisi high (aktif) maka tengangan yang dikeluarkan adalah 5 volt.
Ada 3 (tiga) bagian dalam parallel port yaitu : 1. Port status
Port status mempunyai fungsi untuk mengirimkan kode-kode dari sistem ke PC.
2. Port control
3. Data port
Data port digunakan untuk mengirimkan data ke sistem. Data-data inilah yang nanti dipakai untuk mengendalikan sistem tersebut.
Di bawah ini gambar konfigurasi pin DB 25 male
Gambar 3.15 Konfigurasi Pin Paralel Port (Male)
Apabila ketiga bagian tersebut terhubung dengan suatu alamat pada PC, maka dengan mudah data dapat dikirim dan dibaca melalui parallel port. Untuk mengidentifikasi base address dari parallel port ini maka perlu untuk membuat suatu device manager pada windownya, pada windows 98 :
1. Pada desktop, klik kanan pada My Computer dan pilih properties. 2. Klik pada tab device manager dan cari LPT1.
3. Setelah memilih LPT1 pilih propertie.
Gambar 3.16 Properties LPT1 pada Device Manager
Tabel 3.2 Base Address
Register LPT1
Data register (base address +0) 0*378 Status register (base address +1) 0*379 Control register (base address +2 0*37a
Untuk menghubungkan sistem dengan PC, maka perlu dirancang beberapa rangkaian elektronika dengan menggabungkan port parallel DB 25 sebagai interface-nya. Rangkaian tersebut dapat dilihat pada rangkaian multiplekser dengan port parallel DB 25 seperti telihat pada gambar 3.11 dan pada rangkaian driver motor stepper dengan port parallel DB 25 seperti terlihat pada Gambar 3.12
3.4 Perancangan Perangkat Lunak (Software)
3.4.1 Perancangan Program ANFIS
Dalam perancangan perangkat lunak ini dipakai suatu logika yang dikenal dengan Adaptive Neuro Fuzzy Interference System (ANFIS). Sistem interferensi fuzzy model TSK orde satu dengan pertimbangan kesederhanaan serta kemudahan komputansi. Pertimbangan ini penting karena sistem tersebut akan melalui suatu proses belajar yang mempunyai beban komputansi besar.
Pada sistem interferensi fuzzy TSK orde satu dengan masukan, aturan yang digunakan diekivalenkan dengan struktur jaringan dengan lima lapisan seperti gambar 3.17. Tiap lapisan mempunyai fungsi yang berbeda dan terdiri atas beberapa simpul. Lapisan ANFIS tersebut dijelaskan sebagai berikut.
Gambar 3.17 Struktur Neuro-Fuzzy
1. Lapisan 1
, =
( ) ; = 1,2
( ) ; = 3,4 ……….. (3.1)
( ) = ………. (3.2)
Untuk n = 1, 2 dan I = 1, …,4, dengan {ai,bi,ci} adalah himpunan
parameter premis.
Gambar 3.18 Frame 0 Sequence ANFIS
2. Lapisan 2
, = = ( ) . ( ) ………. (3.3)
[image:57.612.138.504.180.407.2]Gambar 3.19 Frame 1 Sequence ANFIS 3. Lapisan 3
, = = ∑ = ⋯ ……… (3.4)
Untuk i=1, …, 4.
[image:58.612.138.490.85.304.2] [image:58.612.143.494.156.639.2]4. Lapisan 4
, = . = ( + + ) ……… (3.5)
Untuk i = 1, …, 4, dengan {pi,qi,ri} adalah himpunan parameter
konsekuen.
Gambar 3.21 Frame 3 Sequence ANFIS
5. Lapisan 5
= ∑ . = ………. (3.6)
[image:59.612.137.506.127.421.2]Gambar 3.22 Front Panel ANFIS
3.4.2 Perancangan Program Pengaman
[image:60.612.133.509.106.416.2]Gambar 3.23 Front Panel Program Pengaman
Gambar 3.24 Blok Diagram Program Pengaman
3.4.3 Perancangan Program Multiplekser
Untuk mengetahui nilai keluaran dari rangkaian multiplekser apakah sesuai dengan nilai dari keluaran rangkaian ADC (analog to digital converter), Maka dibuat program yang bisa merealisasikan permasalah tersebut. Program ini dapat dilihat pada front panel program Multiplekser ditunjukkan pada gambar 3.25 dan blok diagram program Multiplekser yang ditunjukan pada gambar 3.26.
[image:61.612.242.398.78.159.2]Gambar 3.26 Blok Diagram Program Multiplekser
3.4.4 Perancangan Program Input Tangki
Perancangan program input tangki ini dimaksudkan agar perancangan program tangki berjalan sesuai rencana. Perancangan program input tangki merupakan input data jarak tangki dari data multiplekser, program ini dapat dilihat dalam front panel dan blok diagram yang terdapat pada gambar 3.27 dan gambar 3.28.
[image:62.612.229.408.532.685.2]3.4.5 Perancangan Program Tangki
Perancangan program tangki dibuat untuk mengamati perubahan level ketinggian yang direncanakan yaitu 0 cm sampai dengan 30 cm, dimana data level ketinggian air diambil dari data sensor dari sistem yang sudah dirancang. Program tangki ini dapat dilihat pada gambar 3.29 dan gambar 3.30 yang menunjukkan front panel dan blok diagram program tangki.
Gambar 3.29 Front Panel Program Tangki
[image:64.612.236.403.261.421.2]3.4.6 Perancangan Program Motor Stepper
Perancangan program motor stepper dimaksudkan untuk untuk mengendalikan putaran motor stepper sesuai dengan keinginan yang direncanakan yaitu memutar ke kanan, ke kiri dan berhenti. Program motor stepper ini dapat kita lihat dalam front panel dan blok diagram yang terdapat pada gambar 3.31 dan gambar 3.32.
Gambar 3.31 Front Panel Program Motor Stepper
[image:65.612.220.418.263.418.2]3.4.7 Perancangan Program Pengontrol ANFIS
Perancangan program pengontrol ANFIS dilakukan untuk mengendalikan level ketinggian air dari plant sehingga level ketinggian air tersebut sesuai dengan level ketinggian yang diharapkan (setpoint), perancangan program dilakukan dengan menggabungkan program-program yang sudah dirancang sehingga menjadi suatu kesatuan program pengontrol ANFIS yang akan mengendalikan plant. Program pengontrol ANFIS dapat kita lihat dalam gambar 3.33 (front panel program pengontrol ANFIS) dan gambar 3.34 (blok diagram program pengontrol ANFIS).
[image:66.612.133.507.340.580.2]BAB IV
ANALISA DAN PENGUJIAN SISTEM
4.1
Pengujian Perangkat Keras (
Hardware
)
Pengujian perangkat keras sangat penting dilakukan karena melalui pengujian
ini rangkaian-rangkaian elektronika dapat diuji agar dapat menghindari
kesalahan-kesalahan yang akan menjadi masalah dalam pengontrolan sistem yang sudah
direncanakan.
4.1.1 Pengujian Sensor
Infrared Object Detector
(Sharp GP2D12)
Pada pengujian Sensor
Infrared Object Detector
(Sharp GP2D12) yaitu
melakukan perhitungan jarak obyek dengan sensor dengan mengukur besarnya
tegangan
output
pada sensor
InfraRed Object Detector
.
Output
dari sensor adalah
berupa tegangan.
Tabel 4.1
Data Pengujian Sensor Sharp GP2D12
V
Input
(VDC)
Jarak (cm)
V
Output
(VDC)
5
0
0.76
5
1.5
0.78
5
2.5
0.80
5
3.5
0.82
5
4
0.84
5
5.4
0.88
5
6
0.90
5
6.5
0.92
5
7
0.94
5
8
0.96
5
8.5
0.98
5
9
1.00
5
9.8
1.02
5
10.3
1.04
5
11
1.06
5
11.5
1.08
5
12
1.10
5
12.8
1.12
5
13.5
1.14
5
14
1.16
5
14.5
1.18
5
15
1.20
5
16
1.22
5
16.5
1.24
5
17
1.26
5
17.5
1.28
5
18
1.30
5
18.5
1.32
5
19
1.34
5
19.6
1.36
5
20
1.38
5
20.6
1.40
5
21
1.42
5
21.8
1.46
5
22
1.48
5
22.4
1.50
5
22.8
1.52
5
23
1.54
5
23.3
1.56
5
23.7
1.58
5
23.9
1.60
5
24
1.62
5
24.4
1.64
5
24.6
1.66
5
24.8
1.68
5
25
1.70
5
25.2
1.72
5
25.5
1.74
5
25.8
1.76
5
26
1.78
5
26.2
1.80
5
26.5
1.82
5
26.7
1.84
5
26.9
1.86
5
27
1.88
5
27.3
1.90
5
27.5
1.92
5
27.7
1.94
5
27.8
1.96
5
28
1.98
5
28.2
2.00
5
28.5
2.04
5
28.6
2.06
5
28.7
2.08
5
28.8
2.10
5
29
2.12
5
29.1
2.14
5
29.3
2.16
5
29.4
2.18
5
29.5
2.20
5
29.6
2.22
5
29.7
2.24
5
29.9
2.26
5
30
2.28
5
30.2
2.30
5
30.3
2.32
5
30.5
2.34
5
30.7
2.36
5
30.8
2.38
5
30.9
2.40
5
31
2.42
5
31.1
2.44
5
31.2
2.46
5
31.3
2.48
5
31.4
2.50
5
31.5
2.52
5
31.6
2.54
5
31.7
2.56
5
31.8
2.58
5
32
2.62
5
32.1
2.64
5
32.2
2.66
5
32.3
2.68
5
32.4
2.70
5
32.5
2.72
5
32.8
2.74
5
33
2.76
5
33.1
2.78
5
33.2
2.80
5
33.3
2.82
5
33.4
2.84
5
33.5
2.86
5
33.9
2.88
[image:72.612.160.479.77.544.2]5
34
2.90
Gambar 4.1
Grafik Data Output Sensor berdasarkan Tinggi Tangki
Dari hasil pengukuran dapat disimpulkan bahwa semakin dekat jarak obyek
dengan sensor sharp GP2d12 maka semakin tinggi pula tegangan yang dikeluarkan
oleh
output
sensor tersebut. Dimana sensor diletakan diketinggian maksimal yang
4.1.2 Pengujian Rangkaian Buffer Op-Amp
Maksud dari pengujian rangkaian buffer op-amp adalah untuk mengukur
apakah masukan tegangan keluaran sensor sama dengan keluaran dari rangkaian
op-amp. Berikut tabel pengujian rangkaian yang dapat dilihat pada tabel 4.2.
Tabel 4.2
Data Output Sensor Sharp GP2D12 dari Rangkaian Op-Amp
V
Output
Sensor Sharp GP2D12
V
Output
Op-Amp (VDC)
0.76
0.76
0.80
0.80
0.90
0.90
1.00
1.00
1.10
1.10
1.50
1.50
2.56
2.56
2.86
2.86
Dari hasil pengukuran pada table 2.2 dapat diketahui bahwa kenaikan
tegangan naik 0 Volt, jadi dapat dikatakan bahwa rangkaian sesuai dengan yang
diharapkan.
4.1.3 Pengujian Rangkaian
Analog to Digital Converter
(ADC)
Pengujian pada rangkaian
analog to digital converter
(ADC) dimaksudkan
untuk mengamati konversi masukan analog yaitu berupa tegangan menjadi data
pembacaan tersebut dipengaruhi oleh keluaran dari sensor
Infrared Object Detector
(Sharp GP2D12). Pengambilan data dari ADC 0804 diperoleh dengan faktor
konversi, dimana faktor konversi ini merupakan penentu hasil pembacaan dari
tiap-tiap objek yang diuji, yaitu konversi tegangan analog dari sensor
Infrared Object
Detector
(Sharp GP2D12) dan data digital yang diperoleh, dan data digital ini
digunakan sebagai masukan pada rangkaian multiplekser. Data hasil pengujian ADC
0804 ditunjukkan pada tabel 4.3 data hasil pengujian ADC
Tabel 4.3
Data Hasil Pengujian ADC 0804
NO
TEGANGAN DC
OUTPUT
BINNER
1
0.76
0001 0100
2
0.78
1001 0100
3
0.80
0101 0100
4
0.82
1101 0100
5
0.84
0011 0100
6
0.86
1011 0100
7
0.88
0111 0100
8
0.90
1111 0100
9
0.92
0000 1100
10
0.94
1000 1100
11
0.96
0100 1100
12
0.98
1100 1100
13
1.00
0010 1100
14
1.02
1010 1100
16
1.06
1110 1100
17
1.08
0001 1100
18
1.10
1001 1100
19
1.12
0101 1100
20
1.14
1101 1100
21
1.16
0011 1100
22
1.18
1011 1100
23
1.20
0111 1100
24
1.22
1111 1100
25
1.24
0000 0010
26
1.26
1000 0010
27
1.28
0100 0010
28
1.30
1100 0010
29
1.32
0010 0010
30
1.34
1010 0010
31
1.36
0110 0010
32
1.38
1110 0010
33
1.40
0001 0010
34
1.42
1001 0010
35
1.44
0101 0010
36
1.46
1101 0010
37
1.48
0011 0010
38
1.50
1011 0010
39
1.52
0111 0010
40
1.54
1111 0010
41
1.56
0000 1010
42
1.58
1000 1010
43
1.60
0100 1010
45
1.64
0010 1010
46
1.66
1010 1010
47
1.68
0110 1010
48
1.70
1110 1010
49
1.72
0001 1010
50
1.74
1001 1010
51
1.76
0101 1010
52
1.78
1101 1010
53
1.80
0011 1010
54
1.82
1011 1010
55
1.84
0111 1010
56
1.86
1111 1010
57
1.88
0000 0110
58
1.90
1000 0110
59
1.92
0100 0110
60
1.94
1100 0110
61
1.96
0010 0110
62
1.98
1010 0110
63
2.00
0110 0110
64
2.02
1110 0110
65
2.04
0001 0110
66
2.06
1001 0110
67
2.08
0101 0110
68
2.10
1101 0110
69
2.12
0011 0110
70
2.14
1011 0110
71
2.16
0111 0110
72
2.18
1111 0110
74
2.22
1000 1110
75
2.24
0100 1110
76
2.26
1100 1110
77
2.28
0010 1110
78
2.30
1010 1110
79
2.32
0110 1110
80
2.34
1110 1110
81
2.36
0001 1110
82
2.38
1001 1110
83
2.40
0101 1110
84
2.42
1101 1110
85
2.44
0011 1110
86
2.46
1011 1110
87
2.48
0111 1110
88
2.50
1111 1110
89
2.52
0000 0001
90
2.54
1000 0001
91
2.56
0100 0001
92
2.58
1100 0001
93
2.60
0010 0001
94
2.62
1010 0001
95
2.64
0110 0001
96
2.66
1110 0001
97
2.68
0001 0001
98
2.70
1001 0001
99
2.72
0101 0001
100
2.74
1101 0001
101
2.76
0011 0001
103
2.80
0111 0001
104
2.82
1111 0001
105
2.84
0000 1001
106
2.86
1000 1001
107
2.88
0100 1001
108
2.90
1100 1001
Dari data hasil pengujian rangka1ian 1ADC 0804 terlihat bahwa selisih
tegangan
input
per bit adalah 0.02 volt, hal ini sesuai dengan dasar teori dimana jika
keluaran dari rangkaian op-amp dihubungkan dengan rangkaian ADC 0804, dengan
tegangan referensi sebesar 5 VDC dan lebar data 8-bit, maka setiap kenaikan 1-bit
data resolusinya adalah :
=
……… (
4.1
)
=
= 0.019 ≈0.02
4.1.4 Pengujian Rangkaian Multiplekser
Pengujian rangkaian multipleser dilakukan dengan memakai program
multiplekser yang sudah dibuat (gambar 3.25 dan 3.26). Program multiplekser ini
digunakan untuk mengamati keluaran dari multiplekser apakah sesuai dengan dasar
teori, yaitu multiplekser merupakan rangkaian elektronik yang mampu menyalurkan
sinyal salah satu dari banyak masukan ke sebuah keluaran. Dalam pengujian ini,
dengan menggunakan potensiometer. Hal ini dilakukan karena untuk memudahkan
apakah rangkaian berjalan sesuai dengan yang diharapkan atau tidak.
Pengujian rangkaian multiplekser dilakukan dengan menghubungkan pin-pin
masukan dari IC multiplekser CD 4051 dengan pin-pin keluaran dari ADC 0804
kemudian pin-pin kontrol pada IC multiplekser CD 4051 dihubungkan dengan port
parallel DB 25 yaitu pin 1, pin 14 dan pin 16 sedangkan pin keluaran dari IC
multiplekser CD 4051 dihubungkan dengan pada pin 15 pada port parallel DB 25.
Data hasil pengujian rangkaian multiplekser ditunjukkan pada tabel 4.4
Table 4.4
Data Hasil Pengujian Multiplekser
Data
Input
dari ADC0804
Data
Output
Multiplekser
0000 0000
0
0000 0001
1
0000 0010
2
0000 0100
4
0000 0111
7
0000 1111
15
0001 0000
16
0010 0000
32
0100 000
64
1000 0000
128
1111 1111
255
Dari data hasil pengujian rangkaian multiplekser dapat diketahui bahwa
sehingga data-data tersebut menjadi data dengan satu keluaran, hal ini sesuai dasar
terori dari multiplekser, yaitu rangkaian multiplekser merupakan rangkaian elektronik
yang mampu menyalurkan sinyal salah satu dari banyak masukan ke sebuah keluaran.
4.1.5 Pengujian Rangkaian Driver Motor Stepper
Untuk melakukan pengujian driver motor stepper adalah dengan merancang
program motor stepper kemudian
input
-
input
driver motor stepper dihubungkan pada
pin 2, pin 3, pin 4 dan pin 5 yang mana pin-pin ini merupakan pin-pin data pada port
parallel DB 25, kaki-kaki
input
pada driver motor harus dihubungkan secara
berurutan pada pin-pin data tersebut, jika tidak maka driver motor tidak dapat bekerja
dengan baik, selanjutnya
output
dari driver motor tersebut dihubungkan sesuai
dengan urutan lilitan-lilitan motor stepper, hal ini juga tidak boleh terbalik, jika
terbalik maka motor stepper tidak dapat bekerja dengan baik. Oleh karena itu, untuk
melakukan pengujian ini maka dibuat suatu program yang dapat kita lihat pada
gambar 4.2 dan gambar 4.3 yang merupakan
front panel
dan
blok diagram
program
pengujian driver motor stepper.
Gambar 4.3
Blok Diagram Program Pengujian Motor Stepper
Hasil pengujiannya dari rangkaian driver motor stepper adalah address yang
diset dengan nilai 378 dan kemudian kendali motor diset dengan nilai :
1.
Jika kendali motor > 0 maka keran akan terbuka.
2.
Jika kendali motor < 0 maka keran akan tertutup.
3.
Jika kendali motor = 0 maka keran akan tetap.
4.1.6 Pengujian Motor Stepper
Pengujian motor stepper dilakukan dengan cara memberikan tegangan 12
VDC pada kaki
common
motor stepper, kemudian lilitan-lilitan pada motor stepper
dihubungkan dengan
ground
satu persatu sehingga menghasilkan perputaran yang
dapat bekerja dengan baik dan lancar apabila dapat melakukan hal-hal tersebut, tetapi
jika tidak bisa atau terdapat satu kesalahan saja dalam pengujian, maka motor stepper
tersebut tidak dapat digunakan.
4.1.7 Pengujian Rangkaian Catu Daya
Pengujian ini bertujuan untuk mengetahui keluaran tegangan dari rangkaian
catu daya, apakah sesuai dengan dasar teori yaitu untuk IC 7805 tegangan keluaran
yaitu sebesar 5 Volt dan IC 7812 tegangan keluaran sebesar 12 volt, tabel 4.5
menunjukkan data hasil pengujian keluaran tegangan dari rangkaian catu daya.
Tabel 4.5
Data Hasil Pengukuran Rangkaian Catu Daya
IC Regulator
Tegangan Hasil
Pengukuran
Tegangan yang
Diharuskan
7805
4.88 VDC
5 VDC
7812
11.56 VDC
12 VDC
Dari hasil pengukuran didapatkan bahwa tegangan keluaran dari rangkaian
catu daya tidak sesuai dengan dasar teori, hal ini dikarenakan beberapa faktor,
diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak murni,
selain itu tegangan jala-jala listrik tidak stabil. Persentase error dari keluaran
tegangan rangkaian catu daya adalah sebagai berikut :
1.
IC 7805
= . ∗100% = 2.4%
2.
IC 7812
% = ∗100% …….. (4.3)
= 11.56 12
12 ∗100%
= 3.667 %
4.2
Pengujian Perangkat Lunak (
Software
)
Dalam pengujian perangkat lunak software pada proyek tugas akhir ini terdiri
dari beberapa program untuk mengendalikan level ketinggian air.
1.
Pengujian program tangki
2.
Pengujian program motor stepper
3.
Pengujian program
ANFIS
4.2.1 Pengujian Program Tangki
Pengujian program tangki dilakukan dengan mengisi secara bertahap tangki
proses dengan air, kemudian diamati apakah pergerakan level ketinggian air pada
tangki proses sesuai pada tampilan program tangki, jika perbedaannya terlalu jauh
maka program tidak baik digunakan atau terjadi kesalahan dalam merangkai
perangkat keras (
hardware
), jika level ketinggian air pada tangki proses memiliki
yang sedikit tersebut bisa dikarenakan dari perancangan mekanik pada tangki proses,
Program tangki ini dapat dilihat di gambar 4.4 dan 4.5.
Gambar 4.4
Front Panel Program Tangki
Gambar 4.5
Blok Diagram Program Tangki
Dari hasil pengujian dapat diketahui bahwa perbedaan tinggi air pada tangki
proses tidak jauh berbeda dengan tinggi tangki pada program tangki, berikut tabel
Tabel 4.6
Data Hasil Pengujian Program Tangki
Ketinggian Air pada Tangki
Proses
Ketinggian Air Pada Program
Tangki
15
14.8
18
18
20
20
25
25.2
27
27.2
30
30
4.2.2 Pengujian Program Driver Motor Stepper
Pengujian Program motor stepper dilakukan untuk mangamati pergerakan
motor stepper apakah sesuai dengan yang diharapkan atau tidak. Ada beberapa
kendala yang harus dipenuhi dalam pengujian program driver motor stepper ini yaitu:
1.
Motor berputar kekiri jika dibe