APLIKASI PESAWAT TANPA AWAK (UAV)/DRONE
UNTUK PEMANTAUAN SATWA LIAR
SUMANTRI RADIANSYAH
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa tesis berjudul Aplikasi Pesawat Tanpa Awak (UAV)/Drone Untuk Pemantauan Satwa Liar adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Januari 2017
Sumantri Radiansyah
RINGKASAN
SUMANTRI RADIANSYAH. Aplikasi Pesawat Tanpa Awak (UAV)/Drone
Untuk Pemantauan Satwa Liar. Dibimbing oleh MIRZA DIKARI KUSRINI dan LILIK BUDI PRASETYO.
Pesawat Tanpa Awak (UAV) atau drone saat ini telah digunakan sebagai instrumen pengambil data lapangan pada riset satwa liar. Drone dengan seperangkat kamera (payload) mampu menghasilkan foto udara yang dapat dianalisa dan diinterpretasikan lebih lanjut. Penelitian UAV pada satwa liar sebagian besar menggunakan tipe pesawat (airplane/fixed wing) yang membutuhkan ruang sebagai landasan pacu atau peluncurannya. Multirotor merupakan salah satu tipe UAV yang cocok digunakan untuk penelitian di hutan. Drone jenis ini mampu terbang di antara celah kanopi dan tidak membutuhkan landasan pacu.
Penelitian ini bertujuan untuk menguji aplikasi quadcopter (salah satu tipe
drone multirotor) sebagai instrumen dalam pemantauan satwa liar. Selain itu juga untuk mengukur keakuratan data yang dihasilkan serta faktor-faktor yang mempengaruhinya. Dari hasil tersebut kemudian ditentukan rekomendasi teknis aplikasi quadcopter yang efektif, efisien dan selaras dengan regulasi serta etika fotografi satwa liar. Persiapan dan pengembangan quadcopter dilaksanakan selama 3 Bulan (Maret – Mei 2015). Uji coba aplikasi quadcopter dilaksanakan di Kampus IPB Dramaga, Jawa Barat selama 10 Bulan (Juni 2015 – Maret 2016). Sedangkan aplikasi quadcopter untuk pemantauan satwa liar dilaksanakan di PT PJB UP Paiton, Jawa Timur (April 2016) dan HCVA Perkebunan Kelapa Sawit PT AMR, Kalimantan Tengah (Mei 2016). Analisis data dilakukan secara spasial dan statistik deskriptif.
Uji coba penerbangan dilakukan menggunakan kamera 12 - 24 MP pada ketinggian terbang 50, 100 dan 200 m di atas permukaan daratan (dpd). Foto udara yang dihasilkan memiliki resolusi spasial 0,85 – 4,79 cm/pixel. Kualitas foto udara tergantung kepada jenis dan pengaturan kamera beserta lensanya, sistem peredaman kamera, ketinggian terbang dan ketepatan waktu pemotretan. Rekomendasi teknis aplikasi quadcopter untuk pemantauan satwa liar yaitu penerbangan dengan take off sejauh 300 m dari satwa liar sasaran, pada ketinggian 50 - 100 m dpd (jarak antara obyek sasaran tertinggi yang akan dilintasi dengan quadcopter lebih dari 20 m) dengan kecepatan terbang saat pemotretan 5-7 m/dt dalam kondisi cuaca baik. Kehadiran quadcopter dengan jarak lebih dari 30 m dari Elang Laut Perut Putih (Haliaeetus leucogaster) dan Bekantan (Nasalis larvatus) tidak menimbulkan respon negatif dari satwa liar tersebut. Aplikasi quadcopter yang sesuai dengan etika fotografi satwa liar harus memperhatikan perilaku dan kharakteristik satwa liar sasaran.
SUMMARY
SUMANTRI RADIANSYAH. Unmanned Aerial Vehicles (UAV)/Drone Applications for Wildlife Monitoring. Supervised by MIRZA DIKARI KUSRINI and LILIK BUDI PRASETYO.
Recently, Unmanned Aerial Vehicle (UAV) had been use as an instrument for wildlife research. Drone with a set of cameras (payload) capable of producing aerial photographs that can be further analyzed and interpreted. Most of the UAV research, using an airplane type which need space for runaway and launching. Multirotor is UAV type that suitable for research in the forest. This type can flying at canopy space and do not need runaway.
The research aims are to examine quadcopter (one type of multirotor UAV) application for wildlife monitoring, measure the accuracy of data generated and parameter that affected. From this result then will be determine effective, efficient and appropriate technical recommendation in accordance with the regulation and ethics of wildlife photography. Preparation and quadcopter development conducted in March-May 2015 (3 months). Quadcopter trial held during 10 months (June 2015
– March 2016) at Kampus IPB Dramaga, West Java. While quadcopter application for wildlife monitoring held in April 2016 at PT PJB UP Paiton, East Java and HCVA Palm Oil Plantation PT AMR, Central Kalimantan in May 2016. Data will be analyzed spatial and descriptive statistics.
Flight trials with a camera 12 - 24 MP at altitude 50, 100 and 200 m above ground level (agl), producing aerial photographs with spatial resolution of 0,85 – 4,79 cm/pixel. Aerial photos quality depend on the type and setting of camera, vibration damper system, flight altitude and punctuality of the shooting. For wildlife monitoring the copter is recommended to take off at least 300 m from the target, and flies at 50 - 100 m agl (distance between highest object with quadcopter more than 20 m) with flight speed of 5 - 7 m/sec on fine weather. Quadcopter presence with a distance more than 30 m from White-bellied Sea Eagles (Haliaeetus leucogaster) nest and Proboscis Monkey (Nasalis larvatus) did not cause negative response. Quadcopter application should pay attention to the behaviour and characteristic of wildlife.
© Hak Cipta Milik IPB, Tahun 2017
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
APLIKASI PESAWAT TANPA AWAK (UAV)/DRONE
UNTUK PEMANTAUAN SATWA LIAR
SUMANTRI RADIANSYAH
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Konservasi Biodiversitas Tropika
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
i
PRAKATA
Puji syukur penulis panjatkan kepada Allah atas segala rahmat dan nikmat-Nya, sehingga tesis ini dapat terselesaikan dengan baik. Topik yang dikaji dalam penelitian ini adalah pemanfaatan pesawat tanpa awak/drone sebagai instrumen dalam kegiatan pemantauan satwa liar. Topik ini termasuk kategori inovasi teknologi dalam mendukung pengembangan instrumen riset di dunia satwa liar.
Penelitian ini dilaksanakan selama 15 bulan, mulai Maret 2015 sampai Mei 2016 dalam 2 (dua) tahap kajian. Tahap pertama dilaksanakan di Kampus IPB Dramaga, Bogor dengan fokus kajian uji coba aplikasi quadcopter (tipe UAV
multirotor) dan tahap kedua adalah aplikasi quadcopter untuk pemantauan satwa liar yang dilaksanakan di PT Pembangkit Jawa Bali Unit Pengelola Paiton (PT PJB UP Paiton), Kabupaten Probolinggo, Provinsi Jawa Timur dan Kawasan Bernilai Konservasi Tinggi (KBKT)/High Conservation Value Area (HCVA) perkebunan kelapa sawit PT Agro Menara Rachmat (PT AMR), Kumai Group Astra, Kabupaten Kota Waringin Barat, Provinsi Kalimantan Tengah. Hasil penelitian ini diharapkan dapat memberikan informasi aplikatif tentang pemanfaatan drone untuk riset satwa liar yang praktis, efektif dan efisien.
Penghargaan yang sebesar-besarnya disampaikan penulis kepada PT Riap Indonesia & PT Meganesia Tirta Foresta (MeTTa) atas program beasiswa S2. Pemerintah Daerah & Dinas Kehutanan Kabupaten Malang yang telah memberikan ijin melaksanakan tugas belajar. MeTTa, PT PJB UP Paiton & Astra Group yang telah mendukung sebagian pendanaan riset. Kampus IPB Dramaga, PT PJB UP Paiton, PT AMR atas perkenannya menjadi lokasi riset dan fasilitas yang diberikannya. Ucapan terima kasih yang setulusnya disampaikan kepada AN Putra, E Juarsa, LM Laban, A Suprabhana, IS Sugato, D Ardiansyah atas dukungan moril dan materiil; RW Subekti “Nano” (UAV coach) dan WN Akbar “Waladi” (Aerialvew-650 maker); Zulham, BA Yulianto, H Farmen, R Hardansyah, A Kurniawan, Rismunandar, FI Mansyur, A Chandra, A Herdiyanto atas dukungan dan masukan terhadap naskah. Tidak lupa penghargaan kepada kerabat MeTTa Institute, Tim Elang Paiton, Tim HCV Kumaigreen, Kelas KVT 2013 yang tidak cukup disebutkan satu per satu atas bantuan teknis dan motivasinya.
Penulis juga berterima kasih kepada para pengajar Sekolah Pasca Sarjana IPB, Program Studi Konservasi Biodiversitas Tropika, para pembimbing (Dr MD Kusrini & Prof LB Prasetyo), Dr RRD Perwitasari (penelaah makalah), Dr MB Saleh (penguji) dan Dr B Masy’ud (pimpinan sidang) serta semua pihak yang telah banyak memberikan arahan, saran dan dukungan baik secara langsung maupun tidak langsung. Ungkapan terima kasih pamungkas disampaikan kepada bapak, ibu, istri dan anak-anak serta seluruh keluarga, atas dukungan, doa dan kasih sayangnya. Semoga karya ilmiah ini bermanfaat.
Bogor, Januari 2017
ii
Metode Pengumpulan Data 10
Uji Coba Daya Terbang 10
Uji Coba Tingkat Kebisingan 11
Kualitas Foto Udara dan Mozaik Orthophoto 11 Pemantauan Sarang Elang Laut Perut Putih (Haliaeetus leucogaster) 16 Pemantauan Bekantan (Nasalis larvatus) dan Habitatnya 16
Analisis Data 17
Hubungan Daya Terbang dan Bobot Beban (Payload) 17
Penilaian Tingkat Kebisingan 17
Kualitas dan Akurasi Geometri Foto Udara 17
Pembuatan Mozaik Orthophoto 18
Analisis Mozaik Orthophoto 18
Efektivitas dan Efisien serta Gangguan terhadap Satwa Liar 19 Analisis Foto Udara Hasil Pemantauan Sarang Elang Laut Perut Putih 19 Analisis Foto Udara dan Mozaik Orthophoto Hasil Pemantauan Bekantan 20
3 HASIL DAN PEMBAHASAN 21
Hasil 21
Uji Coba Daya Terbang 21
Tingkat kebisingan 21
Kualitas Foto Udara dan Mozaik Orthophoto 21
Efektivitas dan Efisiensi Quadcopter 24
iii
DAFTAR ISI (lanjutan)
Pembahasan 27
Hubungan Daya Terbang dan Bobot Beban (Payload) 27
Penilaian Tingkat Kebisingan 27
Kendala Aplikasi Quadcopter 28
Kualitas Foto Udara dan Mozaik Orthophoto 29
Efektivitas dan Efisiensi Quadcopter 32
Pemantauan Sarang Elang Laut Perut Putih (Haliaeetus leucogaster) 34 Pemantauan Bekantan (Nasalis larvatus) 35 Rekomendasi Teknis Aplikasi Quadcopter yang Selaras dengan Regulasi
dan Etika Fotografi Satwa Liar 36
4 SIMPULAN DAN SARAN 38
Simpulan 38
Saran 38
DAFTAR PUSTAKA 39
LAMPIRAN 41
iv
DAFTAR TABEL
1. Spesifikasi Aerialview-650 dan Perangkatnya 7 2. Desain Penerbangan Jalur pada Tiga Tingkat Ketinggian 14 3. Kriteria dan Indikator Efektivitas dan Efisiensi Aplikasi Quadcopter
serta Gangguan Terhadap Satwa Liar 19
4. Resolusi Spasial Mozaik Orthophoto berdasarkan Tinggi Terbang dan
Parameter Pengaturan Pemotretan 24
5. Kualitas Foto Udara Berdasarkan Parameter Aplikasi dan Faktor yang
Mempengaruhinya 25
6. Estimasi Penyimpangan Posisi Kamera Berdasarkan Presisi Foto Udara 31
DAFTAR GAMBAR
1. Lokasi Uji Coba Aplikasi Quadcopter 4
2. Lokasi Aplikasi Quadcopter untuk Pemantauan Sarang Elang Laut
Perut Putih 5
3. Lokasi Aplikasi Quadcopter untuk Pemantauan Bekantan dan
Habitatnya 5
4. Aerialview-650 6
5. Kamera yang Digunakan untuk Uji Coba Aplikasi Quadcopter 10 6. Desain Pengukuran Tingkat Kebisingan Quadcopter 11 7. Tahapan Pengambilan Data Penerbangan pada Jalur Terbang 12 8. Rencana Penerbangan Jalur secara Otomatis 14 9. Desain Aplikasi Quadcopter untuk Pemantauan Satwa Liar pada (a)
Sarang Elang Laut Perut Putih, (b) Bekantan dan habitatnya 17 10.Penilaian Tingkat Kebisingan Aplikasi Aerialview-650 22 11.Hasil Pemotretan pada Penerbangan Jalur 23 12.Hasil Identifikasi Kondisi dan Pendugaan Dimensi Sarang Elang 25 13.Hasil Identifikasi Bekantan melompat diantara pohon (a) dan di atas
v
DAFTAR LAMPIRAN
1. Analisis Penerbangan Fc_150620_200_w9 pada Ketinggian Terbang 200 m dpd di Danau LSI – Rektorat, Kampus IPB Dramaga Bogor 42 2. Analisis Penerbangan Fc_150629_100_α5100 pada Ketinggian
Terbang 100 m dpd di Lapangan Sepak Bola Jalan Soka, Kampus IPB
Dramaga Bogor 46
3. Analisis Penerbangan Fc150816_50_α5100 pada Ketinggian Terbang 50 m dpd di Istal Kuda Jalan Cendana, Kampus IPB Dramaga Bogor 50 4. Analisis Penerbangan pada Habitat Bekantan di HCVA Perkebunan
1
PENDAHULUAN
Latar Belakang
Pemantauan satwa liar merupakan salah satu aspek penting dalam upaya konservasi biodiversitas. Pemantauan satwa liar umumnya dilaksanakan dengan metode survei lapangan secara visual. Kendala yang sering dialami pengamat dalam pemantauan satwa liar dengan metode tersebut adalah tidak teraksesnya lokasi pengamatan yang sulit dijangkau atau membahayakan keselamatan pengamat. Salah satu solusi untuk mendapatkan data pada lokasi tersebut adalah dengan pemanfaatan teknologi drone. Drone atau Pesawat Tanpa Awak/Unmanned Aerial Vehicles (UAV) merupakan sebuah robot terbang dengan kendali jarak jauh yang mampu membawa muatan sesuai tujuan dan peruntukannya. Pesawat ini mampu membawa kamera untuk memotret dan merekam serta dapat diterbangkan untuk menjangkau lokasi tertentu dengan pengendalian jarak jauh oleh pilot.
Drone telah lama dimanfaatkan dalam dunia militer, namun baru-baru ini mulai digunakan untuk kepentingan sipil seperti pemantauan aktivitas manusia, survei keanekaragaman hayati, survei ekosistem sungai, pemantauan hutan berbasis masyarakat, dinamika penduduk dan penegakan hukum (Hodgson et al. 2016; Paneque-Galvez et al. 2014; Koh dan Wich 2012). Beberapa keunggulan drone
menurut Paneque-Galvez et al. (2014); Koh dan Wich (2012); Martin et al. (2012) antara lain:
1. Meminimalisir gangguan terhadap ekologi serta resiko keselamatan dan kesehatan manusia (surveyor/peneliti).
2. Dapat menjangkau areal yang sulit diakses oleh manusia, baik karena faktor fisik maupun teknis (total jam terbang drone mencapai 25 menit dan menjangkau jarak sampai 15 km).
3. Memiliki kemampuan menyediakan data yang akurat (drone dapat merekam sampai resolusi pixel 1080/high definition dan menghasilkan foto udara dengan resolusi pixel < 10 cm).
4. Ketidakpekaan terhadap awan, karena umumnya drone terbang di bawah awan. 5. Potensial untuk penyajian gambar dalam bentuk 3 dimensi.
6. Relatif murah dibandingkan dengan penyajian informasi hasil survei lapangan atau penafsiran citra satelit resolusi tinggi (harga drone untuk survei dan pemetaan hutan serta keanekaragaman hayati senilai < US$ 2.000).
7. Dapat dioperasikan secara otomatis melalui pemrograman rencana jalur terbang menggunakan open source software (jenis perangkat lunak yang terbuka untuk dipelajari, diubah, ditingkatkan dan disebarluaskan serta dapat diunduh oleh siapapun dengan mudah secara gratis melalui koneksi internet dengan mengikuti persyaratan yang telah ditentukan oleh pemilik software).
Pemanfaatan UAV dalam beberapa penelitian satwa liar umumnya menggunakan tipe airplane/fixed wing, seperti pada penguin (Hodgson et al. 2016), badak (Pazmany et al. 2014b), orangutan dan gajah (Koh dan Wich 2012),
manatee/lembu laut dan alligator (Martin et al. 2012; Watts et al. 2010; Jones et al. 2006), ibis putih (Jones et al. 2006). Beberapa penelitian juga memanfaatkan
2
memiliki beberapa mesin penggerak berupa dinamo (rotor) yang dilengkapi baling-baling (propeller) untuk mengangkat badan drone dan muatannya (payload) dengan memanfaatkan tenaga angin. Multirotor saat ini banyak digunakan untuk kegiatan pengambilan foto dan video baik untuk kepentingan hobi maupun komersial. Menurut Paneque-Galvez et al. (2014) multirotor seperti quadcopter merupakan tipe drone yang sesuai untuk penelitian di hutan dengan ruang/celah kanopi yang besar dan tidak tersedianya landasan pacu. Quadcopter dapat dioperasikan secara manual dan otomatis dengan pemrograman rencana jalur terbang menggunakan
open source software.
Jones et al. (2006) menyatakan bahwa penggunaan UAV sebagai instrumen riset satwa liar sebaiknya didesain agar mudah diterbangkan, dapat digunakan untuk areal bertebing, pengendaliannya secara otomatis, hanya memerlukan pelatihan singkat bagi pilot untuk mengoperasikannya serta dapat menghasilkan gambar yang terkoreksi secara geometris. Aplikasi UAV sangat tergantung tujuan dan parameter lingkungan yang akan diambil pada setiap lokasi kajian. Kondisi tersebut mengakibatkan perlunya pengaturan sistem UAV sesuai dengan kapasitas UAV, kamera dan jarak atau cakupan area kajian (Hodgson et al. 2016; Pazmany et al. 2014; Koh dan Wich 2012; Martin et al. 2012; Watts et al. 2010; Jones et al. 2006).
Untuk memperoleh sistem penerbangan quadcopter yang efektif dan efisien khususnya dalam pengambilan foto udara pada kegiatan pemantauan satwa liar diperlukan perencanaan dan penyiapan instrumen. Penyiapan instrumen beserta perangkat kelengkapannya dimaksudkan untuk memperoleh instrumen yang siap pakai dan selaras dengan operator serta dapat menghasilkan kebutuhan data yang diperlukan. Sehingga foto udara yang dihasilkan dapat digunakan sebagai bahan dasar dalam identifikasi satwa liar. Hasil analisis foto udara akan menunjukkan tingkat akurasinya yang menentukan interpretasi serta pemanfaatan selanjutnya.
Pemotretan menggunakan quadcopter dalam pemantauan satwa liar merupakan salah satu bentuk fotografi satwa liar. Hal ini tidak terlepas dari dampak terhadap satwa liar sasaran sebagai obyeknya. Menurut Podduwage (2016) prinsip etika fotografi satwa liar adalah melakukan pemotretan dengan meminimalisir dampak/gangguan terhadap satwa liar dan lingkungannya. Informasi yang diperlukan dalam penerapan prinsip tersebut adalah tentang satwa liar sasaran, lokasi, peraturan dan keahlian fotografer. Sensitifitas satwa liar terhadap benda asing yang mendekatinya diasumsikan dapat memberikan dampak atau respon dari satwa liar sasaran. Oleh karena itu, respon satwa liar digunakan sebagai indikator gangguan terhadap satwa liar.
Pertanyaan mendasar tentang pemanfaatan quadcopter sebagai instrumen pemantauan satwa liar yaitu bagaimana teknis aplikasinya, seberapa baik akurasi data yang dihasilkan serta bagaimana respon satwa liar terhadap aplikasinya. Untuk menjawab pertanyaan tersebut maka perlu dilakukan uji coba aplikasi quadcopter
3
Tujuan Penelitian
Penelitian ini bertujuan untuk:
1. Menguji aplikasi quadcopter (drone tipe multirotor) untuk pemantauan satwa liar.
2. Mengukur akurasi data yang dihasilkan oleh quadcopter dan faktor-faktor yang mempengaruhinya.
3. Menilai respon satwa liar sasaran terhadap aplikasi quadcopter.
4. Menentukan rekomendasi teknis aplikasi quadcopter yang efektif dan efisien serta selaras dengan regulasi dan etika fotografi satwa liar.
Hipotesis Penelitian
Hipotesis penelitian adalah:
1. Aplikasi quadcopter pada ketinggian dan kecepatan terbang tertentu menghasilkan foto udara dengan akurasi yang efektif dan efisien untuk identifikasi satwa liar.
2. Kehadiran quadcopter pada jarak tertentu tidak memberikan dampak/respon negatif dari satwa liar sasaran.
Manfaat Penelitian
Manfaat peneltian adalah:
1. Memberikan informasi teknik aplikasi quadcopter yang praktis dan dalam waktu singkat dapat menghasilkan data akurat sesuai kebutuhan serta dapat menjangkau lokasi yang tidak terakses atau membahayakan keselamatan peneliti dalam pemantauan satwa liar.
2. Memberikan gambaran dampak/respon satwa liar terhadap aplikasi quadcopter
sebagai bahan pertimbangan dalam pengelolaan satwa liar.
2
METODE
Waktu dan Lokasi
Penelitian dilaksanakan selama 15 bulan. Persiapan dan pengenbangan
quadcopter dilaksanakan selama 3 Bulan (Maret – Mei 2015). Uji coba aplikasi
quadcopter selama 10 Bulan (Juni 2015 – Maret 2016). Sedangkan aplikasi
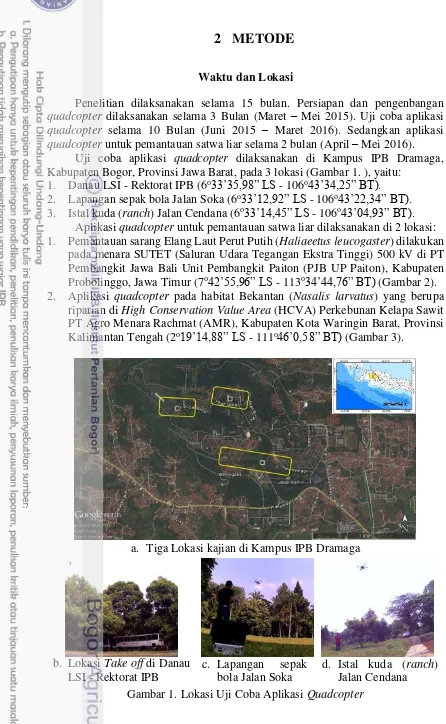
quadcopter untuk pemantauan satwa liar selama 2 bulan (April – Mei 2016). Uji coba aplikasi quadcopter dilaksanakan di Kampus IPB Dramaga, Kabupaten Bogor, Provinsi Jawa Barat, pada 3 lokasi (Gambar 1. ), yaitu:
1. Danau LSI - Rektorat IPB (6o33’35,98” LS - 106o43’34,25” BT). 2. Lapangan sepak bola Jalan Soka (6o33’12,92” LS - 106o43’22,34” BT). 3. Istal kuda (ranch) Jalan Cendana (6o33’14,45” LS - 106o43’04,93” BT).
Aplikasi quadcopter untuk pemantauan satwa liar dilaksanakan di 2 lokasi: 1. Pemantauan sarang Elang Laut Perut Putih (Haliaeetus leucogaster) dilakukan
pada menara SUTET (Saluran Udara Tegangan Ekstra Tinggi) 500 kV diPT Pembangkit Jawa Bali Unit Pembangkit Paiton (PJB UP Paiton), Kabupaten Probolinggo, Jawa Timur (7o42’55,96” LS - 113o34’44,76” BT) (Gambar 2). 2. Aplikasi quadcopter pada habitat Bekantan (Nasalis larvatus) yang berupa
riparian di High Conservation Value Area (HCVA) Perkebunan Kelapa Sawit PT Agro Menara Rachmat (AMR), Kabupaten Kota Waringin Barat, Provinsi Kalimantan Tengah (2o19’14,88” LS - 111o46’0,58” BT) (Gambar 3).
a. Tiga Lokasi kajian di Kampus IPB Dramaga
b. Lokasi Take off di Danau LSI - Rektorat IPB
c. Lapangan sepak bola Jalan Soka
5
Gambar 2. Lokasi Aplikasi Quadcopter untuk Pemantauan Sarang Elang Laut Perut Putih
6
Alat dan Bahan
Alat yang digunakan terdiri atas:
1. Seperangkat UAV system, meliputi:
Quadcopter, Radio Controller
Kamera, Camera mounting, Vibration damper
Laptop
Tools & Box
2. GPS (Global Positioning System)
3. Perekam suara (sound recorder)
4. Meteran (15 m)
5. Binokuler
6. Kamera DSLR (Digital Single lens Reflex)
7. Alat tulis
Bahan yang digunakan antara lain baterai, blocknote/tallysheet danlabel.
Perangkat yang digunakan dalam pengolahan dan penyajian data adalah
laptop termasuk didalamnya:
1. Program Microsoft Office 2013;
2. Programpenerbangan drone (Mission Planner); 3. Program untuk analisis foto (Adobe Photoshop CS5);
4. Program untuk membuat dan analisis mozaik orthophoto (Agisoft PhotoScan); 5. Program analisis bunyi (Praat);
6. Program untuk ekstraksi video menjadi foto (VideoPad Video Editor);
7. Programpengolah dan analisis Sistem Informasi Geografis (Arcgis 10.2).
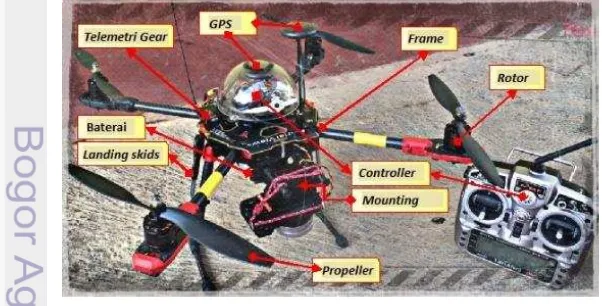
Quadcopter
Quadcopter dalam penelitian ini merupakan hasil rakitan dari komponen (part) bermerk dagang yang diproduksi tidak hanya oleh satu industri. Quadcopter
ini dinamakan “Aerialview-650” karena terbuat dari rangka (frame) bermerk dagang Tarot 650 Sport dengan kaki pendaratan (landing skids) semi otomatis (Gambar 4). Pembuatan Aerialview-650 menghabiskan dana sebesar US$ 2000 atau Rp. 26.000.000,- (hanya quadcopter dan radio controller, tanpa perangkat kamera). Daya terbang Aerialview-650 adalah ± 25 menit dan dapat mengangkut kamera dengan bobot sampai dengan 1200 gram. Posisi kamera diletakkan di bagian depan dan menghadap ke bawah (sudut pandang 90o terhadap quadcopter/arah terbang).
7
Aerialview-650 dilengkapi dengan dua GPS yang menempel pada badan
quadcopter sebagai bagian dari sistem navigasi. Selain itu juga dilengkapi dengan
radio telemetry sebagai penerima perintah pengendalian melalui remote controller.
Aerialview-650 dapat diterbangkan secara manual, semi manual (position &
altituted hold) dan otomatispada jalur yang telah dirancang sebelumnya. Pada saat terbang, Aerialview-650 dapat dimonitor melalui laptop yang telah dilengkapi program penerbangan (mission planner). Secara detil, spesifikasi Aerialview-650
disajikan pada (Tabel 1).
Tabel 1. Spesifikasi Aerialview-650 dan Perangkatnya
No Perangkat Detil
1 Kerangka (Frame)
Tarot 650 Sport(Tipe rangka “X”).
Kerangka terbuat dari karbon dengan model quadcopter (4 lengan) yang dilengkapi dengan landing skids dengan karet penahan diujungnya.
2 Sistem Penggerak (Rotor)
Dinamo berjumlah 4 buah,
SunnySky V2814-11 KV:700.
ESC (Electronic Speed Controller) berjumlah 4 buah,
Hobbywing Platinum Pro 30A. 3 Baling-baling
Auto Controller: ArduCopter V3.2.1 (36b405fb); Fixhawk; 3DR_Aero Double GPS, 3-axis gyro & accelerometer; Magnetometer; 16 Bit automatic dataloging.
Fitur:
Return to home (otomatis kembali ke lokasi take off);
Unlimited waypoint (titik penerbangan tidak terbatas);
Position & Altitude hold (terbang pada posisi dan ketinggian yang ditentukan).
Remote Controller: FrSky Taranis Plus, Digital Telemetry Radio System 2,4 GHz; Combo with X8R; Mode 2; US Charger. Software: Mission Planner 1.3.35 build
1.1.5878.12941.
6 Telemetri (Telemetry gear)
2,4 GHz FPV Radio Telemetry Air module on quad
USB module on Ground Station
7 Dimensi Lebar 700 mm & Tinggi 415 mm (landing skids installed)
8
Tabel 1. Spesifikasi Aerialview-650 dan Perangkatnya (lanjutan)
No Perangkat Detil
8 Bobot (Weight)
1800 gram (dengan Vibration damper dan propeller, tanpa baterai & tanpa kamera)
9 Baterai dan Adaptor
Lithium Polymer Battery: Baterai utama iP3 power 8000 mAh; 4S; 14.8V; 15C (850.gram) & Baterai cadangan: Power 6200mAh; 4S; 14.8V; 35C; (600 gram).
Battery Checker (10 gram).
Charger: Turnigy Power System Accucell 6; Power AC Adater Model JT-96W (in=110-240V; 50Hz; 1.5A Max & out=12V; 4.5A Max).
10 Sistem Kamera
Triger: SkySight Mono V1.1 (Farsight).
Vibration Damper: Tarot Damper for GoPro (static). Kamera :
W9 sports (SP5K Series Digicam). GoPro HERO4 Silver.
Canon Powershoot A1400.
Sony α5100; Lensa pancake 16 mm. Sony α5100; Single Lens 16-50 mm.
11 Beban
Aerialview-650 merupakan quadcopter rakitan yang dikembangkan untuk pemantauan satwa liar. Pertimbangan penggunaan quadcopter rakitan antara lain: 1. Pembuatannya didesain khusus untuk pemetaan dan pemantauan satwa liar. 2. Quadcopter dapat memuat berbagai jenis kamera sesuai kebutuhan pemotretan. 3. Daya terbang dapat disesuaikan dengan bobot baterai dan beban perangkat
kamera (payload).
4. Program untuk operasionalnya menggunakan open source software. 5. Apabila quadcopter mengalami kerusakan, dapat diperbaiki secara parsial. 6. Kemudahan dalam mendapatkan komponen pengganti yang rusak.
Penggunaan quadcopter rakitan dengan beberapa pertimbangan di atas dimaksudkan untuk memperoleh kepraktisan aplikasi di lapangan. Aerialview-650
didesain sebagai quadcopter untuk kegiatan pemetaan atau pemantauan yang dapat dilengkapi berbagai sensor dan payload sesuai kebutuhan. Aplikasi Aerialview-650
dalam riset ini dibatasi hanya menggunakan satu kamera yang menggantung pada
mounting/vibration damper untuk pemotretan/perekaman obyek sasaran tanpa dilengkapi kamera lain untuk kontrol pilot atau yang sering disebut dengan First Person View (FPV). Sensor yang tersedia dalam perangkat Aerialview-650 meliputi
9
kerusakan teknis (technical failure). Semua hasil pengukuran sensor tersebut tercatat selama penerbangan berlangsung dalam dataflash log pada quadcopter.
Operasional Aerialview-650 menggunakan mission planner software yang dapat diunduh secara gratis dan dapat di-update secara berkala untuk penyempurnaannya. Hal tersebut merupakan suatu kemudahan bila dibandingkan dengan penggunaan jenis quadcopter keluaran industri tertentu (bermerk) yang harus menggunakan program khusus sesuai ketentuannya. Koh dan Wich (2012) menggunakan software yang sama dalam pengembangan conservation drone
(drone bertipe fixed wing/airplane seharga kurang dari US$ 2000) untuk pemetaan dan survei keanekaragaman hayati baik di areal perkebunan maupun hutan.
Penggantian dan perbaikan komponen quadcopter secara parsial saat mengalami kerusakan memberikan kemudahan bagi peneliti saat pengambilan data di lapangan. Peneliti tidak perlu menghentikan riset di lapangan dan kembali ke kota hanya untuk memperbaiki quadcopter yang mengalami kerusakan. Selama komponen pengganti tersedia di lapangan atau kerusakan dapat diatasi dengan memodifikasi komponen yang ada, maka perbaikan dapat dilakukan di lapangan. Keperluan mendasar yang harus tersedia dalam perbaikan quadcopter adalah sumber daya listrik. Hal ini selaras dengan kebutuhan pengisian ulang daya baterai yang telah diantisipasi sebelumnya oleh peneliti.
Sebagian besar komponen yang digunakan Aerialview-650 merupakan produksi China serta tersedia di Indonesia. Beberapa bagian terkadang tidak tersedia langsung di Indonesia dan untuk mendapatkannya harus melakukan pemesanan komponen ke China. Waktu yang dibutuhkan untuk hal tersebut selama 1-2 minggu. Alternatif lain untuk memperoleh komponen pengganti yang rusak dalam waktu singkat adalah melalui komunitas penghobi quadcopter. Umumnya anggota komunitas memiliki komponen cadangan, sehingga dapat digunakan terlebih dahulu kemudian diganti dengan komponen yang sama dikemudian hari.
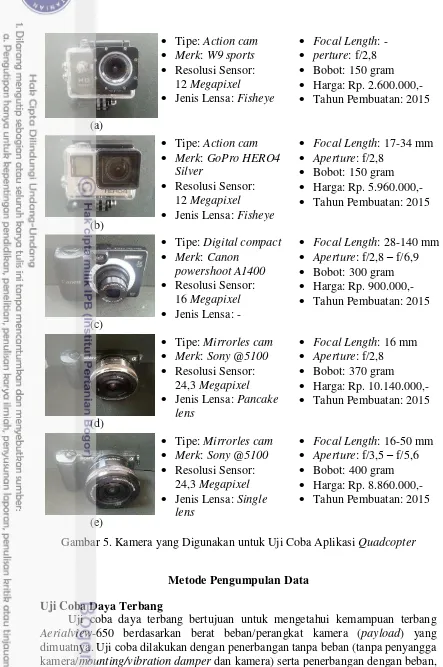
Kamera
Kamera yang digunakan sebanyak 5 buah, terdiri atas 3 tipe, yaitu action cam,
digital compact dan mirrorless cam (Gambar 5). Action cam merupakan tipe kamera yang paling banyak digunakan oleh industri quadcopter. Digital compact
atau yang sering disebut dengan kamera poket merupakan tipe kamera yang paling dikenal dan dipahami penggunaannya oleh masyarakat luas serta harganya terjangkau. Mirrorless cam merupakan tipe kamera dengan kualitas baik, setara dengan kamera DSLR yang sering digunakan oleh fotografer semi profesional, namun memiliki bobot yang lebih ringan dan dimensi yang lebih kecil.
Dasar pemilihan kamera dalam uji coba aplikasi quadcopter adalah: 1. Tipe kamera yang banyak digunakan oleh industri quadcopter. 2. Bobot kamera yang tergolong ringan (< 500 gram).
3. Memiliki resolusi sensor yang baik, yaitu 12 – 24 Megapixel. 4. Variasi harga kamera. Jika diklasifikasikan menjadi:
Harga < 1 juta;
Harga 1-3 juta;
Harga 3-6 juta;
Harga 6-9 juta;
10
Gambar 5. Kamera yang Digunakan untuk Uji Coba Aplikasi Quadcopter
Metode Pengumpulan Data
Uji Coba Daya Terbang
Uji coba daya terbang bertujuan untuk mengetahui kemampuan terbang
11
1. Waktu penerbangan mulai take off–landing (menit).
2. Ketinggian terbang (meter di atas permukaan daratan pada saat take off/m dpd). 3. Cuaca saat proses terbang drone (cerah/berawan).
Tipe penerbangan yang digunakan adalah hover yaitu penerbangan melayang pada posisi dan ketinggian tertentu (2 – 30 m) secara semi manual menggunakan
remote controller oleh pilot dalam areal ± 0,1 ha (terkontrol secara visual). Uji coba daya terbang dilakukan sebanyak 6 penerbangan.
Uji Coba Tingkat Kebisingan
Tingkat kebisingan ditentukan dari nilai intensitas bunyi yang dihasilkan oleh
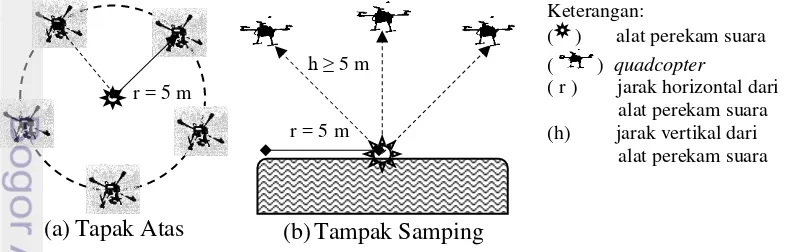
quadcopter saat terbang. Data diperoleh dari perekaman bunyi quadcopter yang diterbangkan secara hover. Jarak terdekat antara quadcopter dengan alat perekam bunyi adalah 5 m baik secara vertikal maupun horizontal (Gambar 6). Penentuan jarak tersebut didasarkan pada penggunaan quadcopter untuk kegiatan pemantauan satwa liar berukuran sedang dan besar di hutan. Satwa liar sasaran khususnya adalah burung dan mamalia yang berada pada tajuk pohon. Uji coba ini dilakukan sebanyak 4 penerbangan.
Kualitas Foto Udara dan Mozaik Orthophoto
Tiga penerbangan dari 11 penerbangan yang telah dilakukan, dipilih sebagai representasi dalam pengukuran kualitas foto udara dan mozaik orthophoto. Jenis data yang dikumpulkan terdiri atas:
1. Ketinggian tempat (meter di atas permukaan laut/m dpl). 2. Waktu penerbangan mulai take off–landing (menit). 3. Ketinggian terbang (m dpd).
4. Kecepatan terbang (meter/detik).
5. Cuaca saat proses terbang drone (cerah/berawan). 6. Foto udara pada areal yang dikaji.
7. Rekaman video proses pengambilan data.
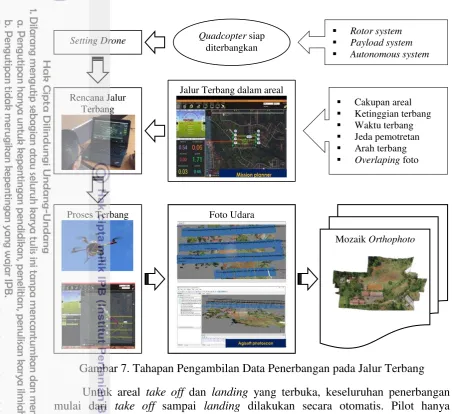
Tahapan pengambilan data penerbangan jalur disajikan seperti Gambar 7. Penerbangan dilakukan dengan sistem penerbangan jalur secara otomatis.
Quadcopter diterbangkan secara otomatis pada jalur terbang yang telah dirancang sebelumnya menggunakan program mission planner (open source software). Dalam penerbangan ini, take off dan landing pada areal dengan banyak pepohonan dilakukan secara semi manual menggunakan remote controller oleh pilot. Setelah itu, penerbangan pada jalur dilakukan secara otomatis tanpa intervensi pilot.
(a)Tapak Atas (b)Tampak Samping
Keterangan:
Gambar 6. Desain Pengukuran Tingkat Kebisingan Quadcopter r = 5 m
h ≥ 5 m
12
Gambar 7. Tahapan Pengambilan Data Penerbangan pada Jalur Terbang Untuk areal take off dan landing yang terbuka, keseluruhan penerbangan mulai dari take off sampai landing dilakukan secara otomatis. Pilot hanya melakukan satu perintah pada remote controller yaitu perintah penerbangan otomatis (autonomous load).
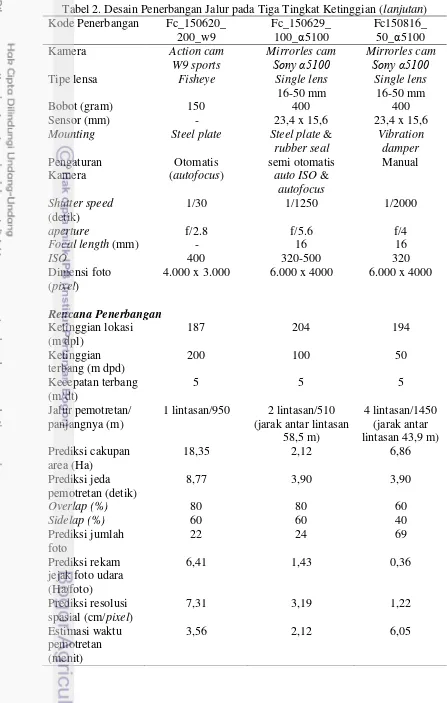
Penerbangan dilakukan pada 3 tingkat ketinggian terbang. Pemotretan dilakukan dengan menggunakan action cam W9 sports pada penerbangan 200 m dpd dan mirrorles cam sony @5100 single lens 16 - 50 mm pada penerbangan 100 dan 50 m dpd. Penentuan ketinggian terbang didasarkan atas:
1. Ukuran satwa liar sasaran tergolong sedang sampai besar, dengan ukuran minimal 30 cm. Koh dan wich (2012) menyatakan bahwa foto udara yang dihasilkan dari penerbangan pada ketinggian 200 m dapat digunakan untuk identifikasi satwa liar berukuran besar (orang utan dan gajah). Oleh karena itu ketinggian terbang sampai dengan 200 m dpd diasumsikan dapat menghasilkan foto udara untuk pemantau satwa liar.
2. Regulasi penerbangan drone di wilayah udara Indonesia menyatakan bahwa penerbangan yang tidak memerlukan ijin khusus adalah pada ketinggian terbang maksimal 150 m untuk areal diluar kawasan terlarang (restricted dan
prohibited area). Penerbangan di atas 150 m pada area tersebut memerlukan ijin khusus dari instansi yang berwenang (Permenhub 2015). Penerbangan pada ketinggian 200 m dpd yang telah dilakukan merupakan penerbangan yang dilaksanakan sebelum dikeluarkannya regulasi tersebut. Sehingga penerbangan selanjutnya dibatasi sampai dengan 150 m dpd menyesuaikan regulasi tersebut.
13
3. Lokasi pemotretan adalah hutan tropis dengan struktur tegakan yang beragam dan bukan merupakan areal terbuka seperti padang pasir, padang rumput, atau savanna. Selain itu obyek sasaran pemotretan merupakan satwa liar yang dinamis beraktivitas di tajuk pepohonan. Sehingga ditentukan ketinggian terbang minimal adalah di atas ketinggian tajuk pohon hutan tropis yaitu 50 m. Kecepatan terbang diatur sebesar 3 m/dt mulai dari take off sampai titik start
(terbang vertikal ke atas saja). Dari titik start menuju titik awal jalur terbang menggunakan kecepatan 7 m/dt. Kemudian terbang dengan kecepatan 5 m/dt selama pemotretan pada jalur terbang. Dari titik akhir jalur terbang menuju titik
landing, quadcopter melaju dengan kecepatan 7 m/dt. Selanjutnya untuk proses
landing/pendaratan, quadcopter menggunakan kecepatan 1,5 m/dt sampai mendarat dengan baik dan rotor mati, baik secara otomatis maupun semi manual.
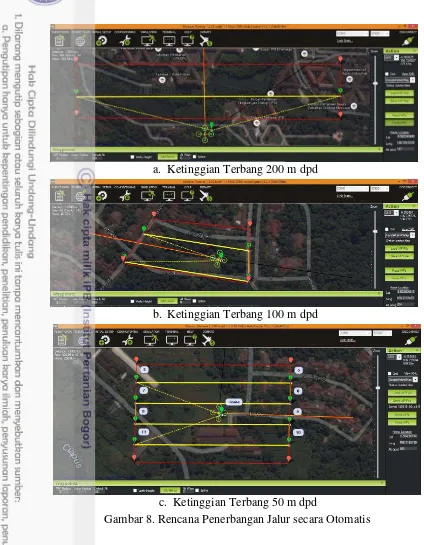
Pemotretan dilakukan dengan jeda waktu yang berbeda-beda, menyesuaikan ketinggian terbang dan jenis kamera. Waktu penerbangan dilakukan secara variatif pada pukul 07:00 – 18:00 WIB saat cuaca tidak hujan (quadcopter didesain tidak tahan air). Rata-rata untuk sekali penerbangan dibutuhkan waktu 1 jam. Rencana penerbangan berupa jalur terbang pada masing-masing lokasi dan ketinggian terbang telah dibuat dalam satu cakupan areal pemotretan yang telah ditentukan menggunakan program mission planner (Gambar 8). Desain penerbangan jalur secara otomatis pada 3 tingkat ketinggian mulai dari rencana sampai hasil penerbangan disajikan pada Tabel 2. Dari pemotretan tersebut diperoleh foto udara yang kemudian akan disusun menjadi mozaik orthophoto.
Sistem autopilot quadcopter memiliki kemampuan untuk melakukan penerbangan secara stabil pada lintasan yang telah ditentukan. Apabila terjadi permasalahan teknis seperti kehabisan daya (baterai) pada saat penerbangan, maka
quadcopter akan secara otomatis kembali mendarat pada titik take off (return to launch). Penerbangan quadcopter dapat dikontrol secara visual melalui program
mission planner pada laptop. Selama mission planner dapat menerima sinyal dari
quadcopter, maka akan terlihat pergerakan quadcopter pada jalur terbangnya. Sistem penerbangan dapat menghasilkan data penerbangan yang terekam dalam
data flash log pada quadcopter. Data tersebut dapat di ekspor ke dalam personal computer/laptop. Meta data yang dihasilkan meliputi:
1. ATT (attitude): Informasi pergerakan quadcopter.
2. ATUN (auto tune): Ikhtisar pengaturan penerbangan otomatis.
3. ATDE (auto tune step details): Tahapan detil pengaturan penerbangan. 4. CAM (camera): waktu dan posisi saat pemotretan.
5. CMD (commands): perintah yang diterima dari stasiun pengendali. 6. COMPASS: kompas baku dan offset.
7. CURRENT: informasi tegangan baterai dan arus.
8. CTUN (throttle and altitude): informasi throttle dan ketinggian terbang. 9. ERR (an error message): pesan kesalahan.
10. GPS: jumlah satelit, HDOP, titik koordinat posisi quadcopter, kecepatan terbang.
11. IMU (accelerometer and gyro): informasi accelerometer dan gyro. 12. Mode (flight mode): tipe sistem penerbangan.
13. NTUN (navigation): informasi navigasi.
14
a. Ketinggian Terbang 200 mdpd
b. Ketinggian Terbang 100 m dpd
c. Ketinggian Terbang 50 m dpd
Gambar 8. Rencana Penerbangan Jalur secara Otomatis
Tabel 2. Desain Penerbangan Jalur pada Tiga Tingkat Ketinggian Kode Penerbangan Fc_150620_
200_w9
Fc_150629_ 100_α5100
Fc150816_ 50_α5100
Data Penerbangan dan Pengaturan Kamera
Lokasi Danau LSI –
Rektorat IPB
Lapangan Sepak Bola Jalan Soka
Istal Kuda Jalan Cendana Tanggal 20 Juni 2015 29 Juni 2015 16 Agustus 2015
Pukul (WIB) 17:21 12:42 09:29
15
Tabel 2. Desain Penerbangan Jalur pada Tiga Tingkat Ketinggian (lanjutan) Kode Penerbangan Fc_150620_
Sony α5100 Mirrorles cam Sony α5100
Tipe lensa Fisheye Single lens
16-50 mm
Single lens
16-50 mm
Bobot (gram) 150 400 400
Sensor (mm) - 23,4 x 15,6 23,4 x 15,6
Mounting Steel plate Steel plate &
rubber seal
16
Tabel 2. Desain Penerbangan Jalur pada Tiga Tingkat Ketinggian (lanjutan) Kode Penerbangan Fc_150620_
Pemantauan Sarang Elang Laut Perut Putih (Haliaeetus leucogaster)
Aplikasi quadcopter untuk pemantauan sarang Elang Laut Perut Putih dilakukan dengan penerbangan Aerialview-650 melintasi menara yang ada sarangnya. Pendekatan penerbangan dilakukan dengan 3 ketinggian terbang, yaitu 100, 80 dan 70 m dpd masing-masing sebanyak satu kali penerbangan dengan menggunakan kamera action cam GoPro HERO4 silver. Jeda penerbangan antar tingkat ketinggian selama 15 - 30 menit. Sedangkan penerbangan pada ulangan kedua dilakukan pada hari berikutnya hanya satu kali penerbangan pada ketinggian 70 m dpd menggunakan mirrorles cam sony α5100, lensa pancake 16 mm. Pengambilan gambar seluruhnya dilakukan dengan pengaturan video secara otomatis. Kecepatan terbang saat perekaman 5 m/dt (Gambar 9a).
Penerbangan dilakukan pada pukul 07:15 – 09:00 WIB. Penentuan waktu tersebut didasarkan atas hasil pengamatan perilaku harian elang yang telah dilakukan sebelumnya oleh peneliti. Pada waktu tersebut elang jantan meninggalkan sarang menuju laut untuk mencari makanan, sedangkan elang betina bertengger di menara yang bersebelahan dengan menarasarang. Elang betina selalu mengawasi sarang dan areal kekuasaannya sembari berjemur dan menelisik bulu. Kondisi sarang kosong, tidak terdapat telur dan anakan.
Pemantauan Bekantan (Nasalis larvatus) dan Habitatnya
Aplikasi quadcopter untuk pemantauan bekantan dan habitatnya dilakukan pada pagi hari (07:00 - 08:00 WIB) sebanyak satu kali penerbangan dan sore hari (15:00 – 16:00 WIB) sebanyak satu kali penerbangan. Penentuan waktu didasarkan atas informasi perilaku harian serta sebaran satwa liar di HCVA dari manajemen PT AMR. Pemotretan dilakukan menggunakan mirrorles cam sony α5100, lensa
17
Gambar 9. Desain Aplikasi Quadcopter untuk Pemantauan Satwa Liar pada (a) Sarang Elang Laut Perut Putih, (b) Bekantan dan habitatnya
Untuk pemotretan habitat bekantan di lokasi lainnya dilakukan pada siang hari (9:00 – 11:00 WIB) sebanyak satu kali penerbangan menggunakan mirrorles cam sony α5100, lensa pancake 16 mm dan 2 penerbangan menggunakan action cam GoPro HERO4 silver. Keseluruhan penerbangan dilakukan pada jalur yang telah ditentukan dengan ketinggian terbang 50 m dpd, dan kecepatan terbang pada saat pemotretan 5 m/dt (Gambar 9b).
Analisis Data
Hubungan Daya Terbang dan Bobot Beban (Payload)
Data hasil uji daya terbang diolah secara statistik deskriptif untuk menentukan relasi antara waktu terbang dan bobot beban serta bobot quadcopter. Persamaan korelasi tersebut kemudian digunakan untuk menunjukkan hubungan daya terbang (nilai minimal – maksimal), bobon beban (tanpa beban – bobot beban maksimal) dan jenis kamera yang optimal pada aplikasi quadcopter.
Penilaian Tingkat Kebisingan
Tingkat kebisingan ditentukan dari hasil analisis nilai intensitas bunyi yang diperoleh dari hasil rekaman bunyi quadcopter. Hasil rekaman bunyi quadcopter
diolah menggunakan program analisis bunyi (praat) untuk mengilustrasikan nilai intensitas bunyi. Nilai intensitas bunyi ≤ 60 dB menunjukkan bahwa quadcopter
memiliki tingkat kebisingan yang rendah atau menurut Wright et al. (2010) dan Vas
et al. (2015) dianggap tidak memberikan dampak negatif terhadap satwa liar.
Kualitas dan Akurasi Geometri Foto Udara
Foto udara yang dihasilkan dari aplikasi quadcopter merupakan data dasar yang diolah menjadi informasi dalam kegiatan pemantauan satwa liar. Penilaian kualitas foto udara dilakukan secara visual dengan melakukan sortasi hasil foto udara dari sisi kejelasan/ketajaman gambar (blur) dan kesesuaian warna obyek. Dari hasil tersebut kemudian dirumuskan faktor-faktor yang mempengaruhi kualitas foto udara baik dari segi teknis aplikasi quadcopter maupun dari segi teknis
18
pemotretan. Akurasi geometri foto udara diperoleh dari pengukuran dimensi foto udara dengan satuan pixel. Pengukuran tersebut menggunakan program adobe photoshop.
Pembuatan Mozaik Orthophoto
Tahap awal dalam membuat mozaik orthophoto adalah sinkronisasi foto udara dengan titik koordinat GPS. Aplikasi Aerialview-650 dengan pengaturan pemotretan menggunakan mirrorles cam sony @5100 dihubungkan dengan triger
(pemicu) sebagai pengaktif kamera untuk memotret saat berada di posisi titik pemotretan yang telah dirancang dalam jalur penerbangan pada program mission planner. Sehingga foto udara yang dihasilkan dapat disinkronisasi dengan titik koordinat GPS quadcopter. Sinkronisasi tersebut dilakukan menggunakan program
mission planner berbasis data pesan yang tersimpan dalam dataflash log. Jumlah foto udara yang dihasilkan harus sama dengan jumlah titik koordinat GPS yang terekam dalam dataflash log. Apabila terjadi perbedaan, maka secara otomatis program mission planner tidak dapat melakukan sinkronisasi tersebut.
Berbeda dengan aplikasi Aerialview-650 yang menggunakan action cam (W9 sports dan GoPro HERO4 Silver) dan kamera digital compact (Canon Powershoot A1400), pengaturan pemotretan yang digunakan berbasis jeda waktu pemotretan tanpa penggunaan triger sebagai pemicu aktivasi pemotretan. Jeda waktu pemotretan pada kamera diatur sedemikian rupa sehingga memiliki durasi yang sama dengan jeda waktu pemotretan pada rancangan jalur terbang di program
mission planner. Pengaturan ini akan menghasilkan foto udara yang dapat disinkronisasi dengan titik koordinat GPS pada dataflash log quadcopter
menggunakan program mission planner. Jumlah foto udara yang dihasilkan harus sama dengan jumlah titik koordinat GPS yang terekam dalam dataflash log, karena apabila terjadi perbedaan maka secara otomatis program mission planner tidak dapat melakukan sinkronisasi.
Tahap selanjutnya adalah pengolahan foto udara yang telah memiliki titik koordinat GPS (central point) menjadi mozaik orthophoto menggunakan program
agisoft photoscan dengan mengikuti langkah-langkah sebagai berikut: 1. Memuat/impor foto dan rekonstruksi jalur terbang.
2. Memeriksa foto yang termuat dan menghapus foto yang tidak diperlukan. 3. Penyelarasan foto.
4. Pembangunan titik tinggi (dense point clouds). 5. Pembangunan model tiga dimensi poligonal(mesh). 6. Pembangunan model tekstur.
7. Pembangunan model ubin (tiled model).
8. Pembangunan model ketinggian digital (DEM/Digital Elevation Model). 9. Pembangunan mozaik orthophoto (orthomosaic)
10. Mengekspor hasil mozaik orthophoto.
Analisis Mozaik Orthophoto
Mozaik orthophoto yang dihasilkan dari proses di atas, secara tidak langsung telah teranalisis pada program agisoft photoscan. Sehingga dapat diketahui informasi mengenai:
19
3. Nilai resolusi mozaik orthophoto (cm/pixel). 4. Luas cakupan areal mozaik orthophoto (m2). 5. Jumlah foto udara yang berhasil diselaraskan.
6. Jumlah tie point (titik yang digunakan dalam proses rekonstruksi foto untuk memperoleh ketelitian dan kualitas hubungan antar foto).
7. Nilai proyeksi dan kesalahan proyeksi ulang (pixel).
8. Jenis kamera, resolusi sensor, focal length, informasi kalibrasi.
9. Posisi kamera dan estimasi penyimpangannya secara horizontal (X,Y) dan vertikal (Z).
10. Resolusi spasial DEM (cm/pixel) dan kerapatan titiknya (titik/m2).
Efektivitas dan Efisien serta Gangguan terhadap Satwa Liar
Efektifitas dinilai dari foto udara yang dihasilkan dapat digunakan untuk identifikasi satwa liar. Sedangkan efisiensi dinilai dari teknis aplikasi quadcopter
yang paling optimal, yaitu mampu menghasilkan foto udara yang luas dalam waktu yang singkat. Gangguan aplikasi quadcopter terhadap satwa liar dinilai dari tingkat kebisingan quadcopter dan respon satwa liar (Tabel 3).
Analisis Foto Udara Hasil Pemantauan Sarang Elang Laut Perut Putih
Untuk mendapatkan foto udara yang menggambarkan kondisi sarang elang, dilakukan ekstraksi pada hasil rekaman video udara. Ekstraksi dilakukan menggunakan program videopad video editor. Foto udara hasil ekstraksi kemudian disortir untuk memperoleh kualitas foto yang baik serta didalamnya harus teridentifikasi sarang elang. Pengukuran dimensi dilakukan pada foto terpilih. Dari foto tersebut dilakukan pengukuran morfometri sarang elang. Proses tersebut dilakukan menggunakan program adobe photoshop.
Tabel 3. Kriteria dan Indikator Efektivitas dan Efisiensi Aplikasi Quadcopter serta Gangguan Terhadap Satwa Liar
Kriteria Indikator
Efektifitas Data yang dihasilkan dapat digunakan untuk identifikasi satwa liar (mamalia dan burung besar)
1. Obyek dapat dibedakan dengan baik 2. Warna obyek diterjemahkan dengan
baik
3. Identifikasi satwa liar sampai tingkat spesies
4. Akurasi foto mencapai 10 cm/pixel
Efisiensi Teknis aplikasi
1. Waktu terbang paling pendek 2. Jumlah foto udara paling sedikit 3. Cakupan luas foto udara paling besar
Gangguan Tingkat kebisingan
quadcopter
Intensitas bunyi > 60 dB
Respon satwa liar terhadap kehadiran
quadcopter
Satwa liar melihat, bersuara, bertingkah panik, melakukan pergerakan
20
Analisis Foto Udara dan Mozaik Orthophoto Hasil Pemantauan Bekantan
Hasil foto udara secara keseluruhan dijadikan bahan dasar untuk proses identifikasi bekantan dan bahan penyusun mozaik orthophoto pada habitat yang dijumpai bekantannya. Proses identifikasi bekantan dilakukan pada foto udara yang berkualitas baik dengan sistem grid. Sistem ini merupakan penilaian dengan cara memberikan deliniasi berbentuk bujur sangkar (grid) yang membagi habis permukaan foto udara, kemudian pada setiap grid dilakukan identifikasi bekantan secara visual. Foto udara yang didalamnya teridentifikasi bekantan diberikan kode tertentu serta dipisahkan untuk analisis lanjutan berupa pengukuran morfometri. Pengukuran morfometri bekantan pada foto udara dilakukan menggunakan program adobe photoshop.Selain itu juga dilakukan pengukuran dimensi foto udara.
Pembuatan mozaik orthophoto yang tersusun atas foto udara hasil penerbangan dimana teridentifikasi bekantan, dilakukan seperti pembuatan mozaik
orthophoto hasil foto udara pada penerbangan jalur secara otomatis (telah dijelaskan di bagian pembuatan mozaik orthophoto). Kemudian mozaik orthophoto
3
HASIL DAN PEMBAHASAN
Hasil
Uji Coba Daya Terbang
Uji coba penerbangan tanpa beban dilakukan untuk mengetahui daya terbang dan kesiapan quadcopter sebelum diterbangkan dengan muatan. Pada sistem penerbangan ini, quadcopter mampu terbang stabil dan aman selama ± 25 menit. Daya terbang maksimal sebenarnya melebihi waktu tersebut yaitu mencapai 30 menit. Namun dalam aplikasinya digunakan ukuran daya terbang optimum dengan alasan keamanan dan keawetan instrumen. Penambahan beban berupa perangkat kamera menunjukkan pengurangan daya terbang quadcopter. Hasil uji coba berdasarkan penambahan tipe kamera sebagai berikut:
1. Action cam W9 sports (150 gr) selama ± 21 menit;
2. Action cam GoPro HERO4 Silver (150 gr) selama ± 21 menit;
3. Digital compact Canon Powershoot A1400 (300 gr) selama ± 18 menit; 4. Mirrorles cam Sony α5100; Pancake lens 16 mm (370 gr) selama ± 16 menit; 5. Mirrorles cam Sony α5100; Single lens 16-50 mm (400 gr) selama ± 16
menit.
Tingkat kebisingan
Aplikasi quadcopter mengeluarkan bunyi akibat putaran rotor dan
propellernya. Hasil identifikasi intensitas bunyi yang dikeluarkan quadcopter pada jarak 5 m mencapai 26,5 dB (Gambar 10). Nilai tersebut ≤ 60 dB yang berarti tingkat kebisingan quadcopter tergolong rendah. Berdasarkan kriteria dan indikator gangguan terhadap satwa liar maka tingkat kebisingan quadcopter di bawah ambang batas gangguan terhadap satwa liar di sekitarnya.
Kualitas Foto Udara dan Mozaik Orthophoto
Penerbangan jalur secara otomatis bertujuan untuk mendapatkan komposisi sistem penerbangan yang optimal dalam menghasilkan foto udara berkualitas baik. Dari keseluruhan uji coba aplikasi quadcopter, terdapat peningkatan baik dari sisi sistem penerbangan maupun foto udara yang dihasilkan. Beberapa kendala yang dialami dalam aplikasi Aerialview-650 adalah:
1. Manuver spontan akibat perpindahan sistem navigasi dari dua GPS. 2. Penerbangan dan pendaratan pada areal sempit secara manual. 3. Propeller terlepas mengakibatkan quadcopter terjatuh.
4. Baterai habis pada saat penerbangan mengakibatkan hard landing.
5. Bad heading estimate (gangguan sistem kompas/navigasi) mengakibatkan
quadcopter sulit dikendalikan.
Penilaian secara visual terhadap foto udara yang dihasilkan dari aplikasi
22
a. Nilai Intensitas Bunyi Quadcopter pada Penerbangan 1
b. Nilai Intensitas Bunyi Quadcopter pada Penerbangan 2
c. Nilai Intensitas Bunyi Quadcopter pada Penerbangan 3
23
Kualitas foto udara dipengaruhi oleh beberapa faktor, yaitu: 1. Perangkat pemotretan (kamera dan lensa).
2. Sistem peredaman getaran (mounting dan vibration damper).
3. Pengaturan pemotretan (kecepatan pemotretan/shutter speed, focal length,
aperture, ISO).
4. Ketepatan waktu pemotretan (cuaca terkait kebutuhan pencahayaan dalam pemotretan).
5. Ketinggian terbang.
Identifikasi obyek melalui foto udara sangat ditentukan oleh kualitas foto udara. Hasil foto udara pada penerbangan dengan ketinggian 50 & 100 m dpd dapat digunakan untuk membedakan satwa liar besar dan pepohonan sampai tingkat jenis. Sedangkan foto udara yang dihasilkan dari ketinggian 200 m dpd hanya dapat digunakan untuk membedakan obyek (Gambar 11). Pemotretan pagi hingga sore hari saat cuaca cerah menghasilkan kualitas foto udara yang baik. Begitu pula pemotretan pagi hingga siang hari saat cuaca berawan. Namun pemotretan pada sore hari dengan cuaca berawan menghasilkan foto udara yang gelap.
a. Action camW9 sports dari Ketinggian 200 m dpd
b. Mirrorles cam Sony α5100 dari Ketinggian 100 m dpd
24
Tidak semua foto udara yang dihasilkan dapat disusun menjadi mozaik, karena tidak semua foto udara yang dihasilkan memiliki keterkaitan secara spasial dan geometris dengan baik. Hal ini ditunjukkan dari posisi kamera saat pemotretan dan tumpang susun foto udara. Mozaik orthophoto yang dihasilkan memiliki resolusi spasial dan kualitas tertentu. Hal tersebut dipengaruhi oleh:
1. Jumlah dan kualitas foto udara yang dihasilkan.
2. Jumlah dan kualitas foto udara yang dapat digabungkan serta diselaraskan (akurasi posisi atau koordinat foto udara).
Secara detil hasil pembuatan mozaik orthophoto disajikan pada Lampiran 1 untuk penerbangan jalur dengan ketinggian 200 m dpd, Lampiran 2 untuk penerbangan pada ketinggian100 m dpd serta Lampiran 3 untuk ketinggian terbang 50 m dpd.
Resolusi spasial mozaik orthophoto yang dihasilkan dari penerbangan pada masing-masing ketinggian disajikan pada Tabel 4. Pada tahap awal uji coba, terdapat penampalan yang kurang sempurna dalam mozaik orthophoto. Hal tersebut disebabkan terdapat foto penyusun mozaik yang berkualitas kurang baik (blur). Tingginya intensitas getaran quadcopter menjadi penyebab utamanya.
Efektivitas dan Efisiensi Quadcopter
Berdasarkan analisis data dan groundcheck, dapat diklasifikasikan kualitas foto udara secara visual menurut parameter aplikasi dan faktor yang mempengaruhinya (Tabel 5). Foto udara yang dihasilkan dari keseluruhan penerbangan telah memenuhi kriteria efektifitas yang telah ditetapkan. Kriteria dan indikator efisiensi terjawab oleh aplikasi quadcopter pada ketinggian terbang 100 m dpd. Foto udara yang dihasilkan pada ketinggian terbang tersebut sudah cukup baik, namun untuk identifikasi detil sampai tingkat jenis satwa liar dengan ukuran 30 – 100 cm digunakan foto udara yang dihasilkan dari penerbangan 50 m dpd. Tabel 4. Resolusi Spasial Mozaik Orthophoto berdasarkan Tinggi Terbang
25 Keterangan: (++++) baik; (+++) cukup; (++) kurang, (+) tidak
Pemantauan Sarang Elang Laut Perut Putih (Haliaeetus leucogaster)
Hasil identifikasi terhadap kondisi sarang menunjukkan bahwa sarang elang masing kosong, tidak ada telur dan anakan. Bahkan sarang tersebut terlihat bersih, tidak nampak sisa-sisa makanan seperti tulang ikan, tengkorak ikan/mamalia kecil dan sampah, hanya terlihat ranting dengan daun yang masih berwarna hijau (ranting baru). Pendugaan dimensi sarang berdasarkan pengukuran pada foto udara (berbasis resolusi spasial foto udara) menunjukkan diameter sarang terpanjang sebesar 201 cm dan terpendek 159 cm (Gambar 12).
Ukuran foto 768 x 768 pixel; Foto insert 200 x 200 pixel (perbesaran 4 kali);
Resolusi spasial foto udara 1 cm/pixel; Pengukuran dimensi sarang: L1 = 201 cm & L2 = 159 cm
Gambar 12. Hasil Identifikasi Kondisi dan Pendugaan Dimensi Sarang Elang L1
26
Quadcopter diterbangkan melintasi sarang elang saat menjelang musim kawin. Pengamatan perilaku harian elang yang dilakukan sebelum aplikasi
quadcopter menunjukkan aktivitas elang jantan dan betina sedang membenahi sarang. Hanya elang betina yang sering berada dalam sarang. Sesekali elang jantan juga berada di sarang untuk mengantarkan makanan kepada elang betina. Kedua elang tersebut tidak tidur dalam sarang. Mereka tidur bertengger di tower lain yang bersebelahan dengan tower sarang. Secara keseluruhan, tidak ada respon negatif yang ditunjukkan oleh elang terhadap kehadiran quadcopter yang melintas di atas sarangnya.
Pemantauan Bekantan (Nasalis larvatus)
Berdasarkan foto udara yang dihasilkan saat pemotretan pagi hari di HCVA PT AMR, teridentifikasi beberapa ekor (satu kelompok) bekantan yang sedang beraktivitas di atas tajuk pepohonan tepian sungai. Hasil pengukuran morfometri bekantan berbasis resolusi spasial foto udara menunjukkan panjang tubuh bekantan 31,4 cm (Gambar 13a) dan 35,2 cm (Gambar 13b). Aplikasi Aerialview-650 secara keseluruhan tidak memberikan dampak terhadap aktivitas bekantan di habitatnya. Bekantan tetap beraktivitas pada saat quadcopter melintas di atas pepohonan tempat mencari makannya.
Mozaik orthophoto yang menggambarkan habitat bekantan pada hutan riparian tersusun atas 54 foto udara yang saling terkait dari total 109 foto udara (Lampiran 4). Hasil analisis mozaik orthophoto menjadi Digital Surface Model/DSM memperlihatkan variasi ketinggian mulai dari -1 hingga 27 m. Variasi tersebut menggambarkan ketinggian permukaan hutan riparian mulai dari permukaan perairan, daratan terbuka, semak belukar dan pepohonan.
Ukuran foto 2000 x 2000 pixel
Foto insert 200 x 200 pixel (perbesaran 25 kali) Resolusi spasial foto udara 1 cm/pixel
Pengukuran morfometri bekantan panjang tubuh (L) = 31,4 cm
Ukuran foto 2000 x 2000 pixel
Foto insert 200 x 200 pixel (perbesaran 25 kali) Resolusi spasial foto udara 1 cm/pixel
Pengukuran morfometri bekantan panjang tubuh (L) = 35,2 cm
Gambar 13. Hasil Identifikasi Bekantan melompat diantara pohon (a) dan di atas tajuk (b) serta Pendugaan Morfometri Bekantan
(a) (b)
L
27
Gambar 14. Deliniasi Tipe Ekosistem Habitat Bekantan pada Hutan Riparian
Deliniasi tipe ekositem hutan riparian pada habitat bekantan dapat diklasifikasikan berdasarkan tutupan lahannya. Gambar 14 merupakan hasil deliniasi tutupan lahan menjadi hutan (pepohonan) dan bukan hutan (badan air, perairan tertutup enceng gondok, tanah terbuka, semak belukar dan pepohonan).
Pembahasan
Hubungan Daya Terbang dan Bobot Beban (Payload)
Aerialview-650 mampu terbang optimal selama ± 25 menit, namun dalam aplikasinya digunakan batas waktu penerbangan yang aman selama ± 15 menit. Hal ini bertujuan untuk memberikan waktu cadangan dalam mengantisipasi terjadinya hal-hal yang tidak dinginkan, seperti menurunnya asupan daya dari baterai pada saat terbang dan pemborosan daya yang harus dikeluarkan quadcopter untuk menstabilkan proses penerbangan pada lingkungan yang kurang mendukung (terpaan angin tinggi). Dengan alokasi waktu terbang tersebut, kamera yang mampu dimuat oleh Aerialview-650 harus berbobot < 500 gram (Gambar 15). Jenis kamera dengan bobot < 500 gram menjadi alternatif pemilihan kamera dalam aplikasi
quadcopter. Semakin ringan bobot kamera yang digunakan maka semakin lama waktu terbangnya.
Penilaian Tingkat Kebisingan
Tingkat kebisingan ditentukan dari hasil analisis nilai intensitas bunyi yaitu bernilai ≤ 60 dB. Menurut Wright et al. (2010) dan Vas et al. (2015) tingkat
kebisingan ≤ 60 dB dengan jarak 2 m dari satwa liar (burung pantai) dianggap tidak
memberikan dampak. Sehingga aplikasi Aerialview-650 dengan jarak terdekat 5 m dari satwa liar tertentu dianggap tidak memberikan dampak negatif.
28
Kendala Aplikasi Quadcopter
Beberapa kendala yang dialami dalam aplikasi Aerialview-650 antara lain: 1. Manuver spontan akibat perpindahan sistem navigasi.
Aerialview-650 telah dilengkapi dengan 2 sistem navigasi, yaitu navigasi utama (GPS 1) dan cadangan (GPS 2). Dalam proses take off dan landing,
quadcopter harus benar-benar mendapat sinyal yang baik agar tepat sesuai sistem navigasi utama. Apabila dalam proses take off/landing tiba-tiba sistem navigasi utama kehilangan sinyal GPS (lost signal), maka sistem navigasi utama secara otomatis digantikan oleh sistem navigasi cadangan. Kondisi ini dapat mengakibatkan manuver spontan dan berdampak terhadap kestabilan
drone. Quadcopter akan bergeser sekitar 2 – 5 meter dari titik semula, karena posisi yang ditentukan oleh GPS 1 dan GPS 2 terdapat perbedaan ± 2 m. Pada posisi yang kurang menguntungkan (seperti di sekitar tajuk pohon), manuver
tersebut dapat mengakibatkan quadcopter menabrak obyek di sekitarnya yang menghalangi (crash). Quadcopter yang mengalami tabrakan dengan obyek lain, terkadang masih dalam kondisi rotor hidup dan memaksa propeller untuk terus berputar. Hal ini dapat merusak komponen baik quadcopter maupun obyek yang tertabrak. Untuk menghindari hal tersebut, dalam kondisi ruang
take off/landing yang sempit dan/atau dikhawatirkan penerimaan sinyal GPS kurang baik, maka proses take off/landing sebaiknya dilakukan secara manual menggunakan remote controller oleh pilot sampai quadcopter mencapai posisi dan ketinggian yang aman (tanpa ada halangan obyek dalam sistem navigasi). Dari titik tersebut quadcopter dibiarkan dalam kondisi hovering beberapa saat (15 – 60 detik). Apabila menurut pilot kondisi quadcopter telah aman dan siap, maka quadcopter dapat diterbangkan/didaratkan secara otomatis sesuai rencana penerbangan yang telah terekam dalam sistem penerbangannya. 2. Penerbangan dan pendaratan pada areal sempit.
Penerbangan dan pendaratan quadcopter secara otomatis aman dilakukan pada areal terbuka dengan kondisi cuaca dan angin yang baik. Apabila penerbangan dan pendaratan dilakukan pada areal yang sempit, sebaiknya dikontrol secara semi manual atau manual oleh pilot, seperti halnya solusi pada bagian manuver
spontan di atas. Hal ini bertujuan untuk menghindari crash dengan obyek di sekitar quadcopter.
3. Propeller terlepas saat proses terbang.
Sistem penerbangan quadcopter sepenuhnya dikendalikan oleh udara yang digerakkan oleh propeller sehingga apabila satu atau lebih propeller terlepas dari rotor akan berakibat terganggunya sistem penerbangan. Quadcopter
secara langsung mengalami kehilangan daya terbang dan akan jatuh. Dalam pengembangan instrumen lebih lanjut, kondisi tersebut sebenarnya bisa diantisipasi dengan penambahan perangkat keamanan berupa parachute system. Sistem ini berfungsi untuk memperlampat proses pendaratan
29
4. Baterai habis saat penerbangan berlangsung.
Kemampuan baterai untuk memberikan asupan energi pada sistem quadcopter
memiliki batasan. Apabila saat terbang quadcopter kehabisan asupan energi, maka sistem penerbangannya akan terganggu. Dalam kondisi tersebut
quadcopter akan mendarat darurat atau terjatuh karena tidak ada daya untuk menggerakkan propeller. Aerialview-650 telah dilengkapi perangkat peringatan dini untuk hal tersebut. Sebelum baterai habis, terdapat alarm yang akan berbunyi sebagai penanda. Saat penanda berbunyi berarti masih terdapat sisa daya baterai untuk pendaratan secara aman. Apabila Aerialview-650
sedang dalam proses terbang otomatis pada lintasan, maka secara otomatis akan kembali dan mendarat di tempat peluncuran semula. Sedangkan jika
Aerialview-650 dalam kondisi terbang semi manual atau manual, maka juga secara otomatis akan kembali dan mendarat di tempat peluncuran awal.
5. Bad Heading Estimate.
Bad heading estimate diartikan sebagai perkiraan posisi quadcopter yang jelek, berupa peringatan yang muncul pada mission planner software saat Aerialview-650 kehilangan posisi terbang. Kondisi tersebut mengakibatkan quadcopter tidak terkendali serta terbang berputar-putar dan akhirnya terjatuh. Dalam kondisi tersebut quadcopter sulit dikendalikan meskipun sudah diambil alih secara manual oleh pilot dengan radio controller. Bad Heading diakibatkan oleh sistem kompas yang terganggu, sehingga membingungkan sistem penerbangannya. Hal ini dikarenakan kebingungan sistem navigasi dalam membaca sinyal GPS. Cuaca yang kurang baik (awan tebal merata) dan penerbangan pada lokasi baru bisa menjadi penyebabnya. Untuk mengatasi hal ini, penerbangan sebaiknya dilakukan pada saat cuaca baik serta memperhatikan nilai HDOP, jumlah satelit dan kondisi awan. Selain itu juga perlu dilakukan kalibrasi quadcopter sebelum penerbangan pada lokasi yang berbeda (utamanya perpindahan ke luar kota/pulau).
Kualitas Foto Udara dan Mozaik Orthophoto Resolusi Spasial Foto Udara
Paneque-Galvez et al. (2014) menyatakan bahwa drone yang diterbangkan pada ketinggian 50-300 m mampu mengakuisisi citra spasial resolusi sangat tinggi, dengan pixel sampai beberapa sentimeter. Foto udara yang dihasilkan oleh