“PRINSIP KERJA PENGUKURAN LAJU ALIRAN PADA PIPA
DENGAN MENGGUNAKAN PLAT ORIFICE DENGAN
TRANSMITTER ELEKTRIK”
(Aplikasi Laboratorium PTKI Medan – Sumut)OLEH :
035203038 DEDIANTO HS
PROGRAM DIPLOMA – IV
TEKNOLOGI INSTRUMENTASI PABRIK
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
A B S T R A K
Pemakaian instrument pada saat ini sangat dibutuhkan terutama pada, industri. Salah satu contoh dari instrument adalah heat flow meter, dimana heat flow meter tersebut terdiri dari plat orifice, flow nozzle, tabung pitot dan tabung venturi. Heat flow meter adalah suatu alat yang digunakan untuk mengukur laju aliran dan sebagai alat perasa (sensor) ke transmitter kemudian dari transmitter ke kontroller hingga sampai pada pengaturan akhir. Dalam pembahasan pengukuran aliran pada pipa dimana yang diukur adalah debit aliran menggunakan plat orifice, yang dilengkapi dengan instrument lain seperti transmitter, control valve, pressure gauge.
Dari pengukuran aliran pada pipa dengan menggunakan plat orifice diperoleh hasil pengukuran debit aliran yang sebanding dengan, perbedaan
tekanan ∆P dimana aliran air pada pipa 500 I/jam menghasilkan perbedaan
KATA
PENGANTAR
Puji syukur penulis ucapkan kepada Allah SWT, atas berkah dan rahmatnya sehingga penulis dapat menyelesaikan karya akhir ini.
Tidak lupa pula penulis ucapkan ribuan terima kasih kepada Ayahanda dan Ibunda tercinta yang tak pernah letih mengasuh, membesarkan, memberi dukungan moral maupun materil dan selalu menyertai Ananda dengan do’a sampai Ananda menyelesaikan Karya Akhir Ini.
Dalam proses penyusunan karya akhir ini, penulis telah mendapat bimbingan dan arahan dari berbagai pihak, maka untuk bantuan yang di berikan baik materil, spiritual, informasi maupun administrasi. Oleh karena itu sepantasnya penulis mengucapakan terima kasih yang sebesar-besarnya kepada :
1. Bapak Prof. Dr. Ir. Armansyah Ginting M.Eng. selaku Dekan fakultas
Teknik Universitas Sumatera Utara.
2. Bapak Ir. Nasrul Abdi. MT. selaku Ketua Program Studi Teknologi
Instrumentasi Pabrik.
3. Bapak Rahmat Fauzi ST, MT. selaku Sekretaris Program Studi
Teknologi Instrumentasi Pabrik.
4. Bapak Ir. Syarifuddin Siregar. selaku dosen pembimbing dalam
penyusunan karya akhir ini.
5. Bapak Ir. H. Masyur M.Si. selaku pembimbing lapangan.
7. Orang tua tercinta dan keluarga yang telah memberikan dukungan moril dan materil serta do’a – do’a nya.
8. Rekan-rekan mahasiswa jurusan Teknologi Instrumentasi Pabrik yang
tidak dapat penulis sebutkan satu persatu, khususnya angkatan 2003 yang telah banyak membantu penulis.
Akhir kata tak ada gading yang tak retak, karena keterbatasan waktu dan kemampuan, penyusun menyadari bahwa dalam pembuatan Karya Akhir ini masih terdapat banyak kekurangan maupun kesalahan. Untuk itu penyususn membuka diri atas segala kritik dan saran yang bersifat membangun agar dapat di diskusikan dan di pelajari bersama demi kemajuan wawasan ilmu pengetahuann teknologi. Semoga karya akhir ini dapat bermanfaat bagi kita semua.
Medan, Juli 2008
D A F T A R I S I
A B S T R A K . . . i
K A T A P E N G A N T A R . . . i i D A F T A R I S I . . . i v D A F T A R G A M B A R . . . v i i D A F T A R T A B E L . . . v i i i B A B I . P E N D A H U L U A N . . . 1
I . 1 . L a t a r B e l a k a n g . . . 1
I . 2 . T u j u a n P e m b a h a s a n . . . 2
I . 3 . B a t a s a n M a s a l a h . . . 2
I . 4 . M e t o d e P e m b a h a s a n . . . 3
I . 5 . S i s t e m a t i k a P e m b a h a s a n . . . 3
B A B I I . T E O R I S I S T E M K O N T R O L . . . 5
I I . 1 . S i s t e m K o n t r o l . . . 5
I I . 1 . 1 . M a n u a l d a n O t o m a t i s . . . 6
I I . 1 . 2 . J a r i n g a n T e r b u k a d a n T e r t u t u p . . . 6
I I . 2 . K a r a k t e r i s t i k S i s t e m K o n t r o l . . . 8
I I . 7 . T r a n s m i t t e r P n e u m a t i k . . . 1 3 I I . 8 . T r a n s m i t t e r E l e k t r i k . . . 1 4 I I . 9 . P e r a l a t a n P e n g o p e r a s i a n T r a n s m i t t e r E l e k t r i k . . . 1 6 I I . 1 0 . A l a t – A l a t K o n t r o l . . . 1 8 I I . 1 0 . 1 . A l a t K o n t r o l T i p e P ( P r o p o r t i o n a l ) . . . 1 9 I I . 1 0 . 2 . A l a t K o n t r o l T i p e D ( D i f f e r e n t i a l ) . . . 2 0 I I . 1 0 . 3 . A l a t K o n t r o l T i p e I ( I n t e g r a l ) . . . 2 1
B A B I I I . P L A T O R I F I C E . . . 2 3 I I I . 1 . P l a t O r i f i c e . . . 2 3 I I I . 2 . M e k a n i s m e K e r j a P l a t O r i f i c e . . . 2 6
B A B I V . A N A L I S A P E N G U K U R A N L A J U A L I R A N P A D A P I P A M E N G G U N A K A N P L A T O R I F I C E D E N G A N T R A N S M I T T E R
E L E K T R I K . . . 2 9 I V . 1 . D a s a r P e n g u k u r a n D e b i t A l i r a n . . . 2 9 I V . 2 . P e n e m p a t a n P l a t O r i f i c e p a d a L o k a s i P e l e t a k a n
I V . 3 . P r i n s i p K e r j a P e n g u k u r a n L a j u A l i r a n p a d a P i p a M e n g g u n a k a n P l a t O r i f i c e d e n g a n T r a n s m i t t e r
E l e k t r i k . . . 3 5 I V . 4 . P e n g a t u r T e k a n a n F l u i d a . . . 3 9 I V . 5 . F a k t o r – F a k t o r y a n g M e m p e n g a r u h i P l a t O r i f i c e
B e r o p e r a s i . . . 4 1 I V . 6 . D a t a H a s i l P e n g a m a t a n . . . 4 2 I V . 7 . S p e s i f i k a s i P e r a l a t a n Y a n g D i g u n a k a n D a l a m
P e r c o b a a n . . . 4 4
B A B V . P E N U T U P
A . K e s i m p u l a n . . . 4 7 B . S a r a n . . . 4 7
D A F T A R P U S T A K A . . . 4 8
D A F T A R G A M B A R
H a l . G a m b a r 2 . 1 . S i s t e m K e n d a l i T e r b u k a . . . 6 G a m b a r 2 . 2 . S i s t e m K e n d a l i T e r t u t u p . . . 7 G a m b a r 2 . 3 . D i a g r a m B l o k S i s t e m P e n g o n t r o l a n . . . 9 G a m b a r 2 . 4 . T r a n s m i t t e r E l e k t r i k . . . 1 4 G a m b a r 3 . 1 . P l a t O r i f i c e J e n i s C o n c e n t r i c O r i f i c e . . . 2 4 G a m b a r 3 . 2 . P l a t O r i f i c e J e n i s E c c e n t r i c O r i f i c e . . . 2 5 G a m b a r 3 . 3 . P l a t O r i f i c e J e n i s S e g m e n t a l . . . 2 6 G a m b a r 4 . 1 . F l a n g e T a p s . . . 3 3 G a m b a r 4 . 2 . V e n a C o n t r a c t a T a p s . . . 3 4 G a m b a r 4 . 3 . P i p e T a p s . . . 3 5 G a m b a r 4 . 4 . C o r n e r T a p s . . . 3 5 G a m b a r 4 . 5 . D i a g r a m F i s i k P e n g u k u r a n A l i r a n F l u i d a
D A F T A R T A B E L
A B S T R A K
Pemakaian instrument pada saat ini sangat dibutuhkan terutama pada, industri. Salah satu contoh dari instrument adalah heat flow meter, dimana heat flow meter tersebut terdiri dari plat orifice, flow nozzle, tabung pitot dan tabung venturi. Heat flow meter adalah suatu alat yang digunakan untuk mengukur laju aliran dan sebagai alat perasa (sensor) ke transmitter kemudian dari transmitter ke kontroller hingga sampai pada pengaturan akhir. Dalam pembahasan pengukuran aliran pada pipa dimana yang diukur adalah debit aliran menggunakan plat orifice, yang dilengkapi dengan instrument lain seperti transmitter, control valve, pressure gauge.
Dari pengukuran aliran pada pipa dengan menggunakan plat orifice diperoleh hasil pengukuran debit aliran yang sebanding dengan, perbedaan
tekanan ∆P dimana aliran air pada pipa 500 I/jam menghasilkan perbedaan
BAB I
PENDAHULUAN
I.1. Latar Belakang Pemilihan JudulPembangunan industri nasional secara mendasar memerlukan tenaga, terdidik yang baik dan terampil, dengan keahlian tertentu dalam bidang instrumentasi industri baik pada tingkat perguruan tinggi maupun tingkat profesional. Instrument tidak hanya sebagai alat pengukur saja, disamping itu juga sebagai alat pengendali dimana kedua fungsi tersebut saling terkait satu dengan yang lain. Plat orifice merupakan salah satu dari instrument proses kontrol yang terdapat pada suatu pabrik.
Sedangkan plat orifice itu sendiri dipergunakan untuk mengukur besarnya laju aliran sebagai alat perasa (sensor) melalui differential transmitter ke kontroller hingga kontroller ke pengaturan akhir. Setiap proses selalu mempunyai "keadaan yang diinginkan" dan suatu "keadaan yang berlangsung". Agar keadaan yang diinginkan sama dengan keadaan yang berlangsung, maka pengontrolan harus dilakukan. Untuk itu maka diperlukan suatu alat pengaturan, adapun gambaran permasalahan yang diperoleh sebelum merancang instrument pengukur aliran pada pipa menggunakan plat orifice adalah keterpasangan instrument pengukuran pada posisi masing-masing, guna mendapatkan ketelitian atau keakuratan dalam memberikan hasil bacaan.
informasi yang tidak sesuai dengan keadaan sebenarnya. Hal ini akan mengganggu proses pengolahan, bahkan dapat merusak kualitas produksi yang dapat mengakibatkan operasi pabrik terhambat.
Berdasarkan uraian diatas, maka penulis tertarik untuk membahas
permasalahan tersebut dan mengambil judul "PRINSIP KERJA
PENGUKURAN LAJU ALIRAN PADA PIPA DENGAN MENGGUNAKAN PLAT ORIFICE DENGAN TRANSMITTER ELEKTRIK" Aplikasi Laboratorium Instrumentasi PTKI
I.2. Tujuan pembahasan
Adapun yang menjadi tujuan dari pembahasan Karya Akhir ini adalah :
1. Untuk mengetahui mekanisme kerja pengukuran laju aliran pada pipa
menggunakan plat orifice dengan trasmitter elektrik.
2. Untuk mengetahui penggunaan instrumentasi proses.
3. Memenuhi salah satu syarat dalam menyelesaikan studi Sarjana Sains
Terapan Departemen Teknik Elektro FT USU.
I.3. Batasan Masalah
Agar pembahasan masalah dalam Karya Akhir ini tidak terlalu meluas,
penulis membatasi ruang lingkup pembahasan Karya Akhir hanya
kepada beberapa hal yaitu :
1. Keterpasangan instrument pengukuran laju aliran pada pipa.
2. Untuk mengetahui faktor-faktor yang mempengaruhi plat orifice saat
3. Mengetahui prinsip kerja dari plat orifice.
4. Tidak membahas perhitungan secara meluas dan mendetail.
I.4. Metode Pembahasan
Dalam membahas suatu objek, kelengkapan data suatu objek merupakan
bagian yang harus dipenuhi. Untuk melengkapi data tersebut maka
penulis melakukan metode pengumpulan data sebagai berikut :
1. Secara teoritis
Mengumpulkan data dan mencari data spesifikasi yang diperlukan tentang
plat orifice serta mencari buku-buku yang sesuai dengan topik bahasan
penulis dan studi kepustakaan.
2. Secara Praktis
Dengan melakukan pengamatan di lapangan (pengambilan data) di
Laboratorium Instrumentasi PTKI-Medan.
I.5. Sistematika Pembahasan
Untuk mempermudah pemahaman dan pembahasan penyusun membuat
sistematika pembahasan dengan urutan sebagai berikut :
BAB I. PENDAHULUAN
Pada bab ini menjelaskan tentang yaitu Latar belakang masalah, tujuan
pembahasan, batasan masalah, tinjauan pustaka, metode Pembahasan,
sistematika penulisan.
BAB II. DASAR SISTEM KONTROL
sistem kontrol otomatik, pemakaian sistem kontrol, transduser,
alat-alat kontrol.
BAB III. BENTUK PLAT ORIFICE
Pada bab ini membicarakan tentang bentuk plat orifice, mekanisme kerja plat orifice.
BAB IV. ANALISA PENGUKURAN LAJU ALIRAN MENGGUNAKAN PLAT ORIFICE PADA PIPA
Pada bab ini menjelaskan tentang berapa besar debit aliran pada pipa, penempatan plat orifice, prinsip kerja pengukuran aliran fluida dengan menggunakan transmitter elektrik.
BAB V. KESIMPULAN DAN SARAN
BAB II
DASAR SISTEM KONTROL
II.1. Sistem Kontrol
Sistem kontrol adalah proses pengaturan ataupun pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam suatu rangkuman harga (range) tertentu. Dalam istilah lain disebut juga teknik pengaturan sistem pengendalian atau sistem pengontrolan. Ditinjau dari segi peralatan, sistem kontrol terdiri dari berbagai susunan komponen fisis yang digunakan untuk mengarahkan aliran energi ke suatu mesin atau proses agar dapat menghasilkan prestasi yang diinginkan.
Tujuan utama dari suatu sistem pengontrolan adalah untuk mendapatkan optimisasi dimana hal ini dapat diperoleh berdasarkan fungsi daripada sistem kontrol itu sendiri yaitu : pengukuran (measurement), membandingkan (comparison), pencatatan dan perhitungan (computation), dan perbaikan
(correction).
Secara umum sistem kontrol dapat dikelompokkan sebagai berikut
1. Dengan operator (manual) dan otomatik.
2. Jaringan tertutup (closed loop) dan jaringan terbuka (open loop).
II.1.1. Manual dan Otomatis
Pengontrolan secara manual adalah pengontrolan yang dilakukan oleh manusia yang bertindak sebagai operator, sedang pengontrolan secara otomatis adalah pengontrolan yang dilakukan oleh mesin-mesin atau peralatan yang bekerja secara otomatis dan operasinya dibawah pengawasan manusia. Pengontrolan secara manual banyak ditemukan dalam kehidupan sehari-hari seperti pada penyetelan suara radio, televisi, pengaturan cahaya televisi, pengaturan aliran air melalui kran, pengaturan kecepatan kendaraan, dan lainnya.
Pengontrolan secara otomatis banyak ditemui dalam proses industri, pengendalian pesawat, pembangkit tenaga listrik. Sebagai contoh adalah pengaturan aliran, temperatur dan tekanan dengan menggunakan katup pengatur, pengontrolan suhu ruangan oleh thermostat, pengontrolan daya listrik oleh relay,
circuit-breaker (pemutus arus).
II.1.2. Jaringan Terbuka dan Tertutup
Sistem terbuka adalah sistem kontrol dimana keluaran tidak memberikan
efek terhadap besaran masukan, sehingga variabel yang dikontrol tidak dapat
dibandingkan terhadap harga yang diinginkan seperti Gambar 2.1.
Gambar 2.1. Sistem Kendali Terbuka
Dimana : X = Sinyal Masukan Y = Sinyal Keluaran
x y
Hubungan antara fungsi masukan, fungsi alih sistem dan fungsi keluaran :
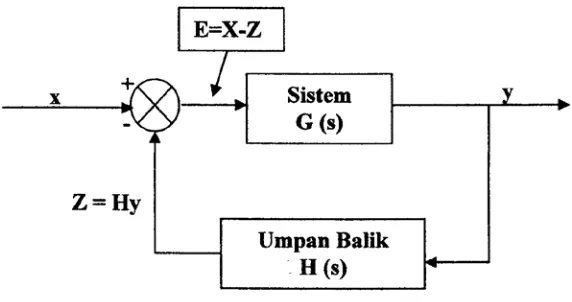
Sistem kontrol dengan jaringan tertutup adalah sistem pengontrolan dimana besaran keluaran memberikan efek terhadap besaran masukan sehingga besaran yang dikontrol dapat dibandingkan terhadap harga yang diinginkan melalui alat pencatat (indicator atau recorder) seperti pada Gambar 2.2. Selanjutnya perbedaan harga yang terjadi antara besaran yang dikontrol dan penunjukan alat pencatat digunakan sebagai koreksi yang pada gilirannya akan merupakan sasaran pengontrolan. Sistem kontrol tertutup mempunyai banyak keunggulan dibanding sistem kontrol terbuka, yaitu mempunyai tingkat ketepatan yang lebih tinggi dan tidak peka terhadap gangguan dan perubahan pada lingkungan.
Gambar 2.2. Sistem Kendali Tertutup
Hubungan antara fungsi masukan, fungsi alih sistem, fungsi umpan balik dan fungsi keluaran :
Z = HY, mempunyai nilai negatif dan harus dikurangkan dari tegangan masukan sehingga menghasilkan masukan pada penguat itu sebesar: E = X – Z
Beberapa karakteristik penting dari sistem kontrol otomatik adalah sebagai berikut :
1. Sistem kontrol otomatik merupakan sistem dinamis (berubah terhadap
waktu) yang dapat berbentuk linear maupun non linear. Secara matematis kondisi ini dinyatakan oleh persamaan-persamaan yang berubah terhadap waktu, misalnya persamaan differensial linear maupun tidak linear.
2. Bersifat menerima informasi, memprosesnya, mengolahnya dan kemudian
mengembangkannya.
3. Komponen yang membentuk sistem kontrol ini akan saling mempengaruhi
(berinteraksi).
4. Bersifat mengembalikan sinyal ke bagian masukan (feedback) dan ini
digunakan untuk memperbaiki sifat sistem. Karena adanya pengembalian sinyal ini (sistem umpan balik) maka pada sistem kontrol otomatik selalu tejadi masalah stabilisasi.
II. 3. Pemakaian Sistem Kontrol
sehari-hari baik dalam pemakaian langsung maupun tidak langsung. Pemakaian sistem kontrol ini dapat dikelompokkan sebagai berikut
1. Pengontrolan proses : temperatur, aliran, tekanan, tinggi permukaan
cairan, viskositas. Misalnya pada industri kimia, makanan, tekstil, pengilangan, dan lain-lain.
2. Pembangkit tenaga listrik (pengontrolan distribusi tenaga).
3. Pengontrolan numeric (numerical control, N/C) : pengontrolan operasi
yang membutuhkan ketelitian tinggi dalam proses yang berulang-ulang. Misalnya : pengeboran, pembuatan lubang, tekstil, pengelasan.
4. Transportasi : elevator, escalator, pesawat terbang, kereta api, conveyor (ban berjalan), pengendalian kapal laut dan lain-lain.
5. Servomekanis.
6. Bidang non teknis, seperti : ekonomi, sosiologi, dan biologi.
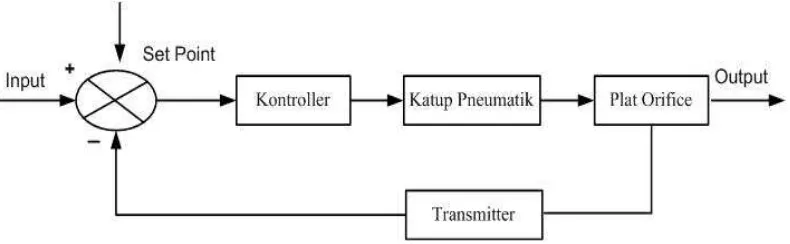
Berikut ini adalah diagram blok dari proses pengaturan debit aliran pada pipa menggunakan plat orifice dengan transmitter elektrik ialah :
Gambar 2.3. Diagram Blok Sistem Pengontrolan
Hampir semua sistem pengendalian selalu dimulai dengan menampilkan blok diagram sistem pengontrolan otomatis. Secara umum elemen sistem kontrolnya ialah :
1. Feedback adalah sistem pengendali otomatis yang mempunyai dua
summing junction yaitu positif feedback dan negatif feedback.
2. Proses (process) adalah tatanan peralatan yang mempunyai suatu fungsi
tertentu. Input proses dapat bermacam-macam, yang pasti ia merupakan besaran yang dimanipulasi oleh final control element atau control valve agar measurement variabel sama dengan set point. Input proses ini juga disebut manipulated variabel.
3. Transmitter adalah alat yang berfungsi untuk membaca sinyal sensing
element, dan mengubahnya menjadi sinyal yang dapat dimengerti oleh kontroller.
4. Set point adalah besaran proses variabel yang dikehendaki. Sebuah
kontroller akan selalu berusaha menyamakan controlled variabel dengan set point.
5. Error adalah selisih antara set point dikurangi measurement variable.
Error bisa negatif dan bisa juga positif. Bila set point lebih besar dari
measured variable, error akan menjadi positif, sebaliknya bila set
pointnya lebih kecil dari measured variable, error menjadi negatif.
6. Kontroller adalah elemen yang mengerjakan tiga dari empat tahap langkah
kontroller sepenuhnya menggantikan peran manusia dalam mengendalikan sebuah proses.
II.4. Transduser
Transduser (transducer) adalah sebuah alat yang mengubah satu bentuk daya menjadi bentuk daya lainnya untuk berbagai tujuan termasuk pengubahan ukuran atau informasi. Transduser bias berupa peralatan listrik, elektronik, elektromekanik, elektromagnetik, fotonik. Dalam pengertian yang lebih luas, transduser kadang-kadang juga didefenisikan sebagai suatu peralatan yang mengubah suatu bentuk sinyal menjadi bentuk sinyal lainnya. Pada umumnya adalah mengubah besaran-besaran fisis tersebut menjadi besaran listrik misalnya : tekanan, temperatur, aliran, posisi dan lain-lain. Contoh yang umum adalah pengeras suara (audio speaker), yang mengubah beragam voltase listrik yang berupa musik atau pidato, menjadi vibrasi mekanis. Contoh lain adalah mikrofon, yang mengubah suara kita, bunyi atau energi akustik menjadi sinyal atau energi listrik.
Transduser atau sensor adalah salah satu bagian dari komponen sistem pengaturan. Sensor yang digunakan sebagai elemen yang langsung mengadakan kontak dengan yang diukur, sedang transduser berfungsi untuk mengubah besaran fisis yang diukur menjadi besaran fisis lainnya.
II.5. Transmitter
lanjut signal dari transmitter dikirim ke indikator/recorder/controller dan lain-lain sesuai dengan kebutuhan. Kegunaan dari transmitter yang memberikan signal standart dan besaran proses (proses variable) yang diukur diantaranya :
a. Peralatan lain seperti indikator, recorder, controller yang bekerja dengan standart signal yang sama agar berfungsi serbaguna, (multi purpose).
b. Memungkinkan pengiriman signal pada jarak jauh dan cepat serta aman.
c. Secara keseluruhan menekan biaya investasi dan pengoperasian maupun
pemeliharaan.
Dalam ilmu instrumentasi dikenal dua sistem signal yang dipergunakan, yaitu sistem signal pneumatik dan sistem signal elektrik. Berdasarkan kedua sistem tersebut transmitter dapat digolongkan menjadi dua jenis yaitu
1. Transmitter Pneumatik
2. Transmitter Elektrik
Pada umumnya transmitter ini adalah merupakan jalur pengirim signal dari alat-alat perasa (sensor) ke controller dan dari controller ke pengatur akhir (control valve).
II.6. Signal Transmitter
Seperti yang telah disebutkan sebelumnya output signal dari sistem pengukuran ada 2 macam yaitu signal elektrik dengan besaran arus atau tegangan, dan signal pneumatik dengan besaran yang digunakan adalah tekanan dari signal tersebut. Sebagai standarisasi signal yang keluar dari transmitter, baik elektrik atau pneumatik, dibuat hanya bekerja pada standart skala tertentu.
yaitu sebesar : 3 – 15 Psi (0-100%) atau 0,2-1 kg/cm2
a. Bagian Perasa (sensor)
(0-100%), dan untuk signal elektrik bila signalnya dalam bentuk besaran arus maka skala kerjanya 4-20 mADC (0-100%) atau 10-50 mADC (0-100%) dan jika menggunakan signal tegangan skala kerjanya : 13 VDC (0-100%) atau 0-10 VDC (0-100%). Namur pada umumnya signal yang keluar dari transmitter elektrik hampir selalu lebih banyak dalam skala 4-20 mADC.
II.7. Transmitter Pneumatik
Pada dasarnya transmitter pneumatik adalah berfungsi untuk mengubah signal proses menjadi signal pneumatik serta mengirimkan signal pneumatik itu ke alat penerima seperti pencatat, pengatur dan penunjuk. Pokok utama transmitter adalah udara yang bertekanan dan biasanya sumber udara yang bertekanan 20 Psi atau 1,4 kg/cm ² . Transmitter pneumatik ini dapat digunakan sampai jarak sekitar 200 meter.
Transmitter pneumatik pada umumnya terdiri dari dua bagian yaitu
Bagian perasa berfungsi untuk mengubah signal proses ke dalam bentuk
gerak mekanik. Misalnya tekanan di dalam bejana sebelumnya adalah 10 Psi
beberapa detik kemudian turun menjadi 9 Psi, perubahan sebesar 1 Psi ini adalah merupakan signal yang harus diubah oleh detektor ke dalam bentuk pergerakan mekanik.
Detektor yang biasa dipakai dalam transmitter ini adalah
- Meter bodi
- Penggeser (Displaces)
- Bola berisi cairan (Liquid Filled Bulb)
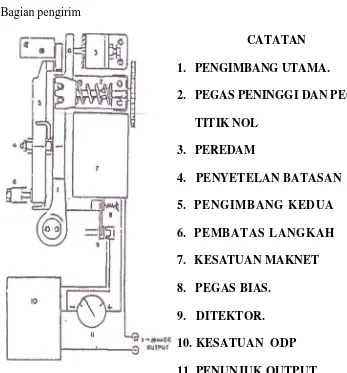
b. Bagian Pengirim.
Bagian pengirim dari transmitter ini berfungsi untuk mengubah gerak mekanik detektor ke dalam bentuk signal pneumatik.
II.8. Transmitter Elektrik
Transmitter elektrik sama haln ya seperti transmitter pneumatik. Transmitter elektrik juga terdiri dari dua bagian pokok yaitu
Transmitter ini juga termasuk jenis transmitter gaya seimbang. Detektor untuk transmitter ini dapat berupa meter bodi, sel beda tekanan, bola berisi cairan dan penggeser.
Adapun prinsip kerja transmitter elektrik adalah sebagai berikut :
- Batang pemuntir dari detektor (bagian perasa) disambungkan
dengan pengimbang utama dari bagian pengirim, sehingga pergerakan dari batang pemuntir menghasilkan pergerakan pada pengimbang utama.
- Pergerakan dari pengimbang utama mengubah jarak antara kedua ferrite
dari detektor bagian pengirim.
- Berubahnya jarak antara kedua ferrite menghasilkan perubahan
pada induktansi dari pick-up coil.
- Perubahan induktansi pick-up coil menghasilkan perubahan pada
output osilator dari kesatuan ODP.
- Perubahan pada output osilator menghasilkan perubahan pada nilai arus
listrik yang keluar dari transmitter. Dengan demikian perubahan pada variable proses yang dirasakan oleh detektor pada bagian perasa dapat menghasilkan perubahan pada nilai arus listrik yang keluar dari bagian pengirim.
- Sebagian dari output osilator dikirim ke kesatuan magnet sehingga
akan terjadi gaya tolak menolak pada kesatuan magnet. Gaya tolak menolak pada kesatuan magnet akhirnya akan menghasilkan pergerakan pada penghubung kedua.
adalah melawan gaya pada pengimbang utama diimbangi oleh pergerakan pengimbang utama. Dengan demikian akan dihasilkan kedudukan dimana perubahan jarak kedua ferrite akan sebanding dengan perubahan variable proses yang dirasakan oleh detektor. kedua ferrite akan sebanding dengan perubahan variable proses yang dirasakan oleh detektor.
II.9. Peralatan Pengoperasian Transmitter Elektrik
Peralatan-peralatan pendukung yang dipakai pada sistem pengoperasian transmitter elektrik adalah sebagai berikut :
A. Kompresor
Kompresor adalah sebuah mesin yang memampatkan udara atau gas. Kompresor bekerja sebagai penguat, sebaliknya ada pula kompresor yang menghisap udara atau gas yang bertekanan lebih rendah dari tekanan atmosfer, dalam hal ini kompresor lebih disebut pompa vakum (vacum pump).
Klasifikasi Kompresor
Kompresor terdapat dalam berbagai jenis dan model tergantunr pada volume dan tekanannya. Sebutan kompresor (pemampat) dipakai untuk tekanan tinggi, blower (peniup) dipakai untuk tekanan sedang, sedangkan fan (kipas) dipakai untuk tekanan yang sangat rendah.
Atas cara penempatannya kompresor terbagi atas dua jenis 1. Jenis Turbo
2. Jenis Perpindahan
Jenis ini menaikkan tegangan dengan memperkecil atau memampatkan volume udara atau gas yang dihisap dalam silinder atau stator oleh torak atau sudut.
B. Pneumatik Control valve
Control valve adalah suatu elemen kendali akhir. Dalam rangkaian kendali control valve langsung mengubah besarnya aliran fluida, dimana dengan mengubah besarnya aliran fluida dapat mengontrol beberapa variable seperti tekanan, level, dan temperatur. Secara umum control valve terbagi menjadi dua bagian yaitu :
1. Elemen kendali akhir untuk pengendali on/off (misalnya selenoid valve, pneumatik control valve).
2. Elemen kendali akhir untuk pengendali kontinu (misalnya difragma
control valve).
Walaupun ada beberapa sistem pengendali on/off yang menggunakan pneumatik control valve sebagai elemen pengendali akhir namun fungsi dipengendali ini tidak lebih istimewa dari diafragma control valve.
Prinsip kerja pneumatik control valve
C. Converter
Converter adalah instrument yang dapat menggerakkan suatu kendali. Peran converter adalah mengubah signal elektrik menjadi signal pneumatik yang diperlukan untuk mengoperasikan control valve. Besarnya signal listrik yang merupakan signal input adalah 4-20 mA. Converter juga disuplay dengan tekanan udara sebesar 1,4 kg/cm2
D. Controller
. Besarnya signal input ditentukan oleh besarnya signal input yang berasal dari controller. Signal output dari converter merupakan signal input bagi control valve, dimana pengaturan besar persen bukaan control valve diatur oleh besarnya signal output converter (biasanya dalam persen).
Controller bekerja menerima signal input dari sebuah converter dan mengirim sinyal output ke converter pada standart 0,2-1,0 kg/cm2
E.Recorder
pada tekanan pneumatik. Controller ini merupakan alat pengatur otomatis yang berfungsi untuk mengatur agar keadaan yang sedang berlangsung dari proses sesuai yang diinginkan.
Recorder dipakai untuk mengetahui perubahan dari waktu dalam kondisi operasi atau mendapat rekaman dari harga hasil pengukuran. Diantara recorder ada recorder yang bersambung yang merekam harga hasil pengukuran terus menerus dengan pena perekam. Dalam merekam harga hasil pengukuran digunakan recorder jenis pencatat, recorder ini berganti-ganti merekam harga hasil pengukuran pada beberapa tempat dengan menggunakan switch-over otomatis.
II.10. Alat-alat Kontrol
respons misalnya mengurangi atau menghilangkan
a. Alat kontrol tipe P (proportional)
(penyimpangan dalam keadaan mantap) atau memperbesar kecepatan respons maka yang dilakukan adalah penggunaan alat-alat kontrol dari jenis P (proportional), I (integral), atau D (differential).
Jenis jenis alat kontrol ini terdiri dari
b. Alat kontrol tipe I (integral) c. Alat kontrol tipe D (differential)
Kontroller Proportional, Integral, dan Diffential dalam prakteknya dapat digabung menjadi satu kontroller yang disebut kontroller Proportional plus Integral plus Derivative (P + D + I)
II.10.1. Alat Kontrol Tipe Proportional (Proportional Control)
Pada jenis ini terdapat hubungan kesebandingan antara keluaran terhadap kesalahan yaitu :
m(t) = K e(t), dimana K disebut konstanta kesebandingan.
P e r t a m b a h a n h a r g a K a k a n m e n a i k k a n p e n g u a t a n s i s t e m (penyimpangan dalam keadaan mantap). Pemakaian alat kontrol jenis ini saja sering tidak memuaskan karena penambahan K selain akan membuat sistem lebih sensitif, tetapi juga cenderung mengakibatkan ketidakstabilan. Disamping itu pertambahan K adalah terbatas dan tidak cukup untuk mencapai respons sampai suatu harga yang diinginkan.
hal ini akan mengakibatkan osilasi bagi respons yang berarti memperlama "settling-time", sedang dipihak lain respons terhadap setiap perubahan masukan harus terjadi secepat mungkin. Respons yang cepat memang dapat diperoleh dengan memperbesar K, tetapi hal ini juga akan mengakibatkan ketidakstabilan sistem.
Untuk mengatasi masalah-masalah ini, alat pengontrol yang akan digunakan harus mempunyai persyaratan berikut :
a. Penguatan yang tinggi pada frekuensi-frekuensi yang sangat rendah untuk
mengurangi kesalahan-kesalahan.
b. Penguatan yang tinggi pada frekuensi-frekuensi tinggi yakni dengan
secepatnya mengikuti perubahan masukan bila laju perubahan transien adalah yang paling cepat. Hal ini perlu untuk menjamin respons yang cepat.
c. Pada frekuensi-frekuensi menengah yakni dalam bagian terakhir respons
transien dan sebelum "on set" (kondisi-kondisi mantap) penguatan sebaiknya cukup rendah agar ter arnin respons yang tidak mengalami lonjakan yang berlebihan dan juga setiap kecenderungan berosilasi akan direndam dengan cepat.
II.10.2. Alat Kontrol Tipe Differential (D)
Alat kontrol jenis ini (disebut juga "rate-control") digunakan untuk memperbaiki atau mempercepat prestasi respons transien sebuah sistem kontrol.
menstabilkan sistem dengan cara memperbesar "phase-lead" terhadap penguatan loop kontrol yakni dengan mengurangi "phase-lead"' terhadap penguatan loop
kontrol yakni dengan mengurangi "phase-lag " penguatan tersebut.
Alat kontrol ini sangat bermanfaat sebab responnya terhadap laju perubahan kesalahan menghasilkan koreksi yang berarti sebelum kesalahan tersebut bertambah besar, jadi efeknya adalah menghasilkan tindakan pengontrolan yang cepat. Hal ini sangat penting bagi sistem kontrol yang perubahan bebannya tejadi secara tiba-tiba, karena dapat menghasilkan sinyal pengontrol selama kesalahan (error) berubah. Karena tipe D ini melawan perubahan-perubahan yang terjadi dalam keluaran yang dikontrol, efeknya adalah menstabilkan sistem loop tetutup dan ini dapat meredam osilasi yang mungkin terjadi.
Penting diperhatikan bahwa tipe D ini fidak dapat dipakai secara tersendiri karena tidak akan memberi jawaban (respons) terhadap suatu kesalahan dalam kondisi mantap. Dengan demikian alat ini harus digabung dengan tipe P atau P + I, sehingga konfigurasi atau bentuknya adalah P + D atau P + D + I.
II.10.3. Alat Kontrol Tipe Integral (I)
Al at kon t rol j eni s ini (i nt eg r al co nt r ol , I) d i m ak s u dk an un tu k menghilangkan kesalahan posisi dalam kondisi mantap (steady position error) tanpa mengubah karakteristik-karakteristik frekuensi tinggi dan hal ini dapat dicapai dengan memberikan penguatan tak terhingga pada frekuensi nol yakni pada kondisi mantap.
P + I adalah cukup. Walaupun demikian, penambahan tipe P perlu mendapat perhatian karena efeknya mengurangi kestabilan yakni karena mengakibatkan bertambahnya keterlambatan fasa (phase-lag).
Alat kontrol jenis I dapat berupa peralatan pneumatic, hidraulik; elektronik. Bagian integral (I) menunjukkan bahwa tindakan pengontrolan akan
terus bertambah selama terjadi kesalahan dan bila sinyal penggerak (actuating signal)m(t) yang cukup telah terakumulir, maka sinyal e(t) akan menurun menuju
BAB III
PLAT ORIFICE
III.1. Plat Orifice
Agar dapat melakukan pengendalian atau proses-proses industri, kuantitas bahan yang masuk dan keluar dari proses perlu diketahui. Kebanyakan bahan ditransportasikan diusahakan dalam bentuk fluida, maka penting sekali mengukur kecepatan aliran fluida dalam pipa. Berbagai jenis meteran digunakan untuk mengukur laju arus seperti plat orifice. Plat orifice merupakan pengukuran aliran fluida yang paling banyak digunakan didalam pabrik-pabrik. Hal ini dikarenakan oleh harga yang murah dan pemasangannya yang mudah.
Plat orifice ini berbentuk plat yang berlubang dengan pinggiran yang tajam dan plat orifice ini terbuat dari bahan logam yang tahan terhadap korosi seperti stainless steel. Plat orifice ini disisipkan pada jalur aliran fluida yang akan diukur. Plat orifice merupakan alat primer yang berfungsi untuk mendapatkan beda tekanan antara sebelum plat orifice dengan sesudah plat orifice. Sedangkan peralatan sekunder dapat berupa manometer pipa U. Untuk plat orifice ini fluida yang digunakan adalah jenis cair dan gas. Pada plat orifice ini piringan harus berbentuk plat dan tegak lurus pada sumbu pipa.
digunakan pipa bertekanan tinggi yang banyak tenaga atau tekanannya. Plat orifice ini juga digunakan untuk tujuan percobaan atau testing dipipa steam.
Prinsip dasar pengukuran plat orifice tergantung dari kenyataan bahwa, plat orifice adalah suatu penyempitan yang menyebabkan timbulnya suatu perbedaan tekanan pada fluida yang mengalir. Plat orifice disebut juga head flow meter. Pengukuran meteran yang sebenarnya adalah head statis atau tekanan pada salah satu sisi plat orifice. Kemudian sisi meteran merubah pengukuran head statis kesuatu pengukuran flow.
Plat orifice dapat dibagi atas 3 bagian yaitu
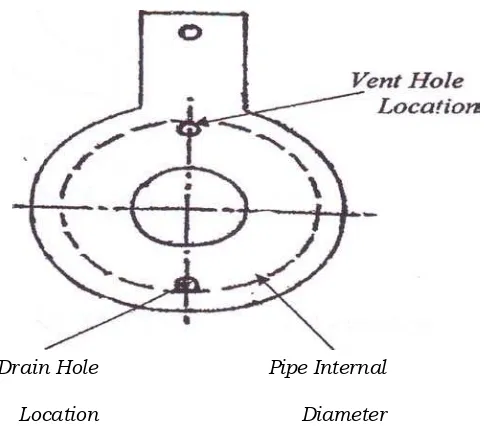
1. Jenis Concentric Orifice
Pads jenis Concentric Orifice ini digunakan untuk semua jenis fluida yang tidak mengandung partikel-partikel padat. Concentric dibuat dengan mengebor port secara sentrik dalam bagian tengah plat. Tipe orifice ini lebih populer karena konstruksinya yang lebih sederhana dan mudah dibuat. Jenis ini dapat dilihat pada Gambar 3.1
Drain Hole Pipe Internal
Location Diameter
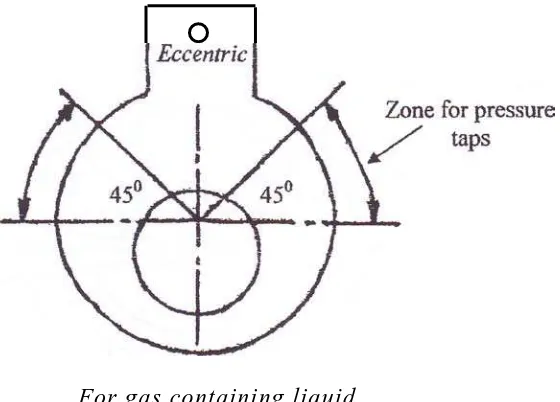
2. Jenis Eccentric Orifice
Eccentric orifice memiliki potongan lubang pembatas secara eksentrik
sehingga mencapai b agian dasar pipa. Pada jenis eccentric orifice ini dipergunakan untuk fluida yang mengandung partikel-partikel padat. Tipe orifice ini sangat bermanfaat untuk pengukuran cairan yang telah memiliki padatan. Bila padatan tidak berkumpul pada orifice, maka sisi orifice tidak akan mengalami kerusakan atau error dalam pengukuran dapat dikurangi.
Jenis ini dapat dilihat pada Gambar. 3.2.
For gas containing liquid Or
For liquid containing solids
Gambar 3.2. Plat Orifice Jenis Eccentric Orifice
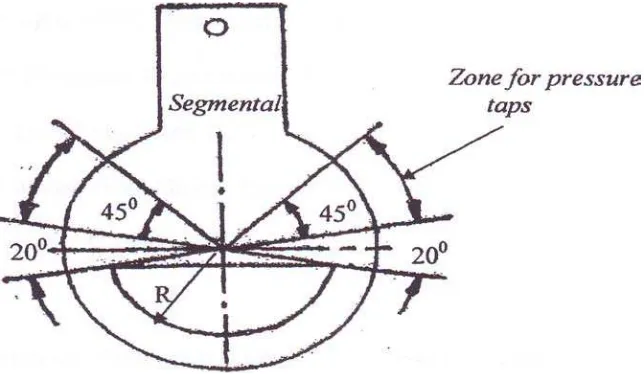
3. Jenis Segmental Orifice
pada Gambar. 3.3.
Pada pembahasan karya akhir ini membahas tentang plat orifice jenis concentric orifice yang sesuai dengan apa yang akan diukur yaitu laju alirannya yaitu air.
For vapor containing liquid For
For liquid containing solids
Gambar 3.3. Plat Orifice Jenis Segmental 111.2. Mekanisme Kerja Plat Orifice
Mekanisme kerja plat orifice berdasarkan beda tekanan dengan rumus Bournaulli. Oleh Tuan Bournaulli dari persamaan energi yang dimiliki oleh suatu fluida yang mengalir dan setelah melalui modifikasi sesuai peruntukannya maka tertulislah rumus-rumus tentang :
• Hukum kekekalan massa / persamaan kontinuitas,
m p.V.A = konstan V.A = Q m = p.Q Dimana :
V = Kecepatan Fluida (cm S – 1 ) A = Luas Penampang (m²)
ρ = Massa Jenis Fluida (Kg/cm3
• Hukum kekekalan energi/persamaan energi persatuan volume
) Q = Debit Aliran Fluida (m³/sec)
P+1/2PV2
P = Tekanan (atm)
+ Pg.Z = konstan
Dimana :
G = Percepatan Gravitasi (m/sec2
Z = Ketinggian dari Ditum (m)
Pengukuran aliran fluida berdasarkan prinsip pemakaian "Head" didapat dari teori Bournaulli yang mengatakan "Jumlah energi kinetik dan potensial. Dalam suatu massa partikel dari suatu aliran fluida pada tiap-tiap titik dalam jejaknya adalah konstan selama tidak ada kehilangan energi akibat gesekan atau penambahan energi akibat pemampatan".
g =Grafitasi Bumi (m/ sec²) ρ= Density (Kg/cm3
2
4 xd A=π
) Luas Penampang :
Dimana:
A = Luas Penampang (m3
π
) = 3,14
d = Diameter Plat orifice (m)
Maka kecepatan atau laju aliran dapat dihitung : Q = V x A
Dimana:
Q = Debit Aliran (m3/sec)
V = Kecepatan atau laju aliran (m/sec) A = Luas Penampang (m2)
BAB IV
Analisa Pengukuran Laju Aliran Pada Pipa
Menggunakan Plat Orifice Dengan Trasmitter Elektrik
IV.1. Dasar Pengukuran Debit Aliran
Pengendalian proses-proses pada industri sangatlah penting. Kuantitas bahan yang masuk dan keluar dari suatu proses perlu diketahui. Kebanyakan bahan-bahan yang ditransportasikan diusahakan dalam bentuk fluida. Karena pentingnya pencapaian kuantitas bahan yang sesuai dengan kebutuhan maka penting sekali mengukur debit aliran fluida di dalam pipa serta mempelajari keterpasangannya. Berbagai jenis alat pengukuran aliran digunakan, salah satu pengukuran aliran metode beda tekanan yang sering digunakan adalah plat orifice.
Sebelum kita melakukan pengukuran pertama-pertama kita harus mengetahui jenis dan karakteristik fluida. Hal yang berhubungan dengan jenis dan karakteristik aliran fluida yang dimaksud disini adalah profil aliran dalam wadah tertutup (pipa pada umumnya). Profil aliran dari fluida yang melalui pipa akan dipengaruhi oleh gaya momentum fluida yang membuat fluida bergerak didalam pipa, gaya viscous atau gaya gesekan yang menahan aliran pada dinding pipa dan fluidanya sendiri (gesekan internal) dan juga dipengaruhi oleh belokan pipa, valve dan sebagainya.
memberikan profil kecepatan yang lebih seragam dibanding aliran laminer, walaupun pada lapisan fluida dekat pipa tetap laminer.
Profil kecepatan pada daerah transisi antara laminar dan turbulen dapat tidak stabil dan sulit untuk diperkirakan karena aliran dapat menunjukkan sifat dari daerah aliran laminar ataupun osilasi antara keduanya. Untuk mengetahui profil aliran fluida dilakukan dengan apa yang disebut bilangan reynold (RD).
Plat orifice adalah suatu alat yang digunakan untuk mengukur debit aliran
D = Bilangan Reynold.
Q gpm = Jumlah aliran dalam gallon per menit. Q cpm = Jumlah aliran dalan cubic feet per menit.
D = Diameter pipa dalam inchi.
Besarnya bilangan Reynold yang terjadi pada suatu aliran dalam pipa dapat menunjukkan apakah profil aliran tersebut laminer atau turbulen. Biasanya angka < RD 2000 merupakan batas aliran laminer dan angka > RD 2300 dikatakan
aliran turbulen, sedangkan RD diantara keduanya dinyatakan sebagai aliran
fluida berdasarkan beda tekanan yang berbentuk bulat yang tengahnya dibuat berlubang dengan pinggiran yang tajam. Untuk mengukur debit aliran fluida di dalam pipa dapat diketahui dengan rumus sebagai berikut :
Dimana : Q = Debit Aliran (m 3 /sec) K = Koofisien. Gesekan (0,8251) A = Luas Penampang (m ²)
∆P = Perbedaan Tekanan (mmHg)
g = Grafitasi Bumi (m/ sec²)
d = Diameter Plat orifice (m)
Maka kecepatan atau laju aliran dapat dihitung : Q = V x A
Dimana:
Q = Debit Aliran (m3/sec)
V = Kecepatan atau laju aliran (m/sec)
IV.2. Penempatan Plat Orifice Pada Lokasi Peletakan Lubang (Taps)
Dal am pengam bi l an b eda t ekanan m aka, l o k asi lu b ang-l u b ang pengambilan beda tekanan dalam pengukuran besaran aliran fluida sangat penting baik dalam lubang sebelum alat ukur maupun sesudah alat ukur. Untuk pengukuran cairan, penumpukan sisa-sisa dari gas atau uap pada sambungan-sambungan antara pipa dan alat pengukur harus dihindari. Hal ini bertujuan agar pengukuran tidak meleset dan stabil. Untuk itu lubang pengambilan beda tekanan pada umumnya ditempatkan pada bidang horizontal dari garis tengah pipa. Sama halnya untuk pengukuran gas, penumpukan sisa-sisa dari cairan atau uap harus dihindarkan untuk itu, lubang-lubang pengambilan beda tekanan biasanya diletakkan pada bagian atas pipa. Tekanan awal dan akhir dari plat orifice akan sangat berbeda oleh jarak dari plat orifice. Oleh karma itu standar dari penentuan jarak ini tergantung dari pipa yang digunakan. Terlepas dari apakah orifice dipergunakan untuk pengukuran cairan, gas, atau uap maka lokasi pengambilan beda tekanan untuk pengukuran dapat dibagi dalam empat bentuk.
IV.2.1 Flange Taps
Seperti terlihat pada Gambar 4.1. Pada flange taps dapat diketahui bahwa
jarak masing-masing lubang pengambilan beda tekanan terhadap plat orifice
adalah satu inchi taps. Pada flange taps ini lubang-lubang pengambilan beda tekanannya terhadap flange taps itu sendiri. Flange taps pada umumnya dipergunakan untuk pipa-pipa yang berdiameter dua inchi keatas. Dibawah dari ukuran dua inchi, flange taps tidak dapat dipergunakan karena, membuat pengukuran meleset dan tidak stabil.
terlalu tebal dimana ditempatkan jauh dari plat orifice. Bagian sisi dari plat orifice
ini dipertahankan diantara flensa dan dibuat setipis mungkin dan jarak tertentu
dari plat orifice. Ketebalan plat orifice untuk flange taps dapat dilihat dalam
Tabel 4.1.
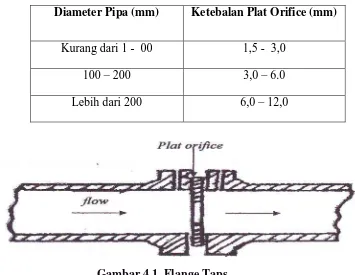
Tabel 4.1. Ketebalan Maksimum Plat Orifice untuk Flange Taps
Diameter Pipa (mm) Ketebalan Plat Orifice (mm)
Kurang dari 1 - 00 1,5 - 3,0
100 – 200 3,0 – 6.0
Lebih dari 200 6,0 – 12,0
Gambar 4.1. Flange Taps
IV.2.2 Vena Contracta Taps
ukuran enam inchi yang dapat dillihat pada Gambar 4.2. Untuk pipa yang berdiameter lebih dari enam inchi, umumnya dipergunakan tipe radius taps. Radius taps adalah jenis dari vena contracta taps. Perbedaan kedua jenis plat
orifice ini terletak pada penempatan lubang-lubang down -stream orifice atau
lubang sesudah plat orifice ini. Sedangkan untuk lubang up-stream orifice adalah sama. Untuk radius taps, lubang down –stream ditempatkan pada jarak 1,5 dari diameter pipa aliran yang diukur dari sisi down –stream.
Gambar 4.2. Vena Contracta Taps
IV.2.3 Pipe Taps
Pada tipe pipe taps ini, lubang-lubang pengambilan beda tekanan berbeda antara lubang stream orifice dengan lubang down–stream. Beda lubang up-stream orifice ditempatkan pada jarak 2,5 kali dari besar diameter pipa aliran yang
digunakan diukur dari sisi up-stream orifice. Sedangkan pada lubang down-stream orifice ditempatkan pada jarak delapan kali dari diameter pipa aliran yang
Gambar 4.3. Pipe Taps
IV.2.4 Corner Taps
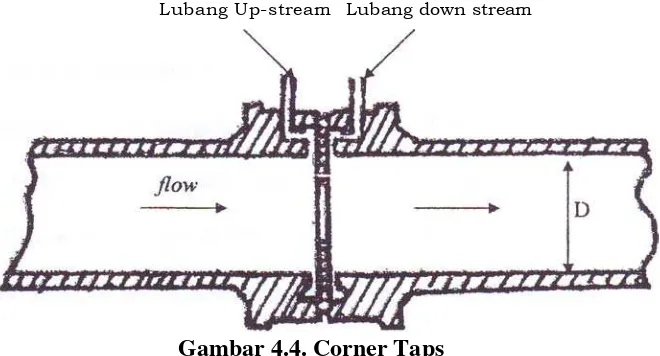
Corner taps atau taps sudut ini hampir sama dengan flange taps, dimana titik
pengambilan beda tekanannya pada corner taps adalah sudut-sudut antara plat orifice dengan dinding pipa aliran, dapat dilihat pada Gambar 4.4. Corner taps hanya dipergunakan untuk pipa dibawah ukuran dua inchi.
Lubang Up-stream Lubang down stream
Gambar 4.4. Corner Taps
IV.3 Prinsip Kerja Pengukuran Laju Aliran Pada Pipa Menggunakan Plat Orifice dengan trasmitter electric
dalam pipa, laju aliran fluida tersebut akan mengalir melalui suatu transmitter element yang dapat merasakan tekanan pada plat orifice. Dimana transmitter element tersebut akan menghasilkan suatu tekanan differensial pada sensor tekanan DP, kemudian tekanan aliran fluida tersebut akan di rubah oleh pengubah tekanan menjadi sinyal elektric. Jika sinyal tekanan masukan diaplikasikan ke bellow dan menghasilkan simpangan batang, simpangan batang ini di ukur oleh sebuah LVDT ( linear variabel differensial transformer). Transformer ini terdiri dari suatu kumparan primer dan dua kumparan sekunder yang di tempatkan pada kedua sisi kumparan. Kumparan sekunder mempunyai jumlah gulungan yang sama tetapi mereka dihubungkan seri secara berlawanan, sehingga gaya gerak listrik (ggl) yang diinduksi di dalam kumparan sekunder tersebut saling berlawanan. Posisi dari inti yang dapat bergerak menentukan hubungan fluksi antara kumparan primer yang dieksitansi oleh tegangan dan masing – masing dari kedua kumparan sekunder.
disebelah kanan lebih banyak dari fluksi kumparan sebelah kanan, sedang besarnya juga sama dengan selisih antara kedua gaya gerak listrik (ggl) yang di induksikan. Keluaran transformer ini akan mengeluarkan tegangan sebesar 1-5mV. Jika kumparan mengalami regangan atau tekanan, dimana tegangan keluaran tersebut di komversikan menjadi standard sinyal elektrik yang di perlukan untuk pembacaan alat yaitu berupa arus sebesar 4-20 mA. Bila inti dari transformer masukan di jauhkan dari posisi referensinya oleh sebuah masukan pergeseran yang di berikan dari luar, sebuah tegangan keluaran di berikan ke penguat. Transmitter elektrik akan menerima sinyal elektric tersebut. Sinyal elektrik hasil keluaran dari transmitter elektric akan mengirim ke controller untuk proses selanjutnya. Sinyal keluaran dari pengontrolan pada controller yang dapat di baca adalah sinyal elektric sebesar 4-20 mA. Pada controller akan mengirimkan sinyal ke comverter I/P. Prinsip kerja comverter I/P yang di dasarkan pada prinsip kerja keseimbangan gaya yang terkenal dan nosel flapper. Arus elektrik di lewatkan melalui kumparan dan menghasilkan suatu perpindahan rotasional dari batang. Perubahan tekanan yang di hasilkan pada celah nosel-flapper di nampakkan volumenya oleh relai udara dan di gunakan sebagai sebuah gaya penyeimbang oleh bellow di ujung lainnya batang. Suatu keseimbangan di hasilkan bila gaya bellow (proposional dengan tekanan keluaran) sama dengan gaya kumparan (proposional dengan sinyal elektric masukan). Komverter I/P akan mengirim sinyal ke aktuator pnematik untuk di lanjutkan ke control valve, dimana control valve akan mengatur laju aliran fluida pada pipa.
Keterangan : 1. Pompa.
Berfungsi untuk menyuplai aliran fluida pada pipa.
2. Pressure Gage (PG).
Berfungsi untuk mengetahui laju aliran pada pipa.
3. Plat Orifice
Berfungsi sebagai element perasa/sensor untuk mengetahui besar tekanan pada fluida yang mengalir dan untuk mendapatkan beda tekanan antara sebelum dan sesudah plat orifice.
4. Transmitter
5. Flow Rate Control (FRC)
Berfungsi untuk menampilkan hasil akhir dari proses pengukuran. 6. Converter
I = Elektrik , mengubah sinyal pneumatic ke elektrik. P= Pneumatik, merubah sinyal elektrik ke pneumatic.
7. Control Valve (CV)
Bagian akhir dari instrument sistim pengendali. Bagian ini berfungsi untuk mengubah measured variabel dengan cara memanipulasi besarnya berdasarkan perintah controller.
8. Air Regulator
Penyaring udara bertekanan pada suatu sistem proses.
9. Kompresor
Berfungsi untuk menyuplai udara atau mesin yang memampatkan udara atau gas.
IV.4. Pengatur Tekanan Fluida
Kecepatan laju aliran pada pipa dalam sistem transmitter bisa saja terjadi tinggi, dan hal ini menyebabkan turunnya tekanan yang bergantung pada aliran yang signifikan antara penerima aliran beban.
Jika digunakan dengan tekanan jalan buntu yang tidak menarik aliran, maka tekanan aliran akan naik ke tekanan pipa.
Tekanan biasanya diatur dengan pengaturan jumlah aliran fluida yang keluar dari sebuah pipa. Suatu pengaturan tekanan aliran fluida dimana pengaturan ini di lengkapi dengan suatu controller dan control valve. Untuk membuka dan menutup valve bagi pengaturan tekanan dalam pipa.
Adapun prinsip kerja dari pressure control tersebut sebagai berikut :
Aliran fluida masuk dalam pipa maka pipa dialirkan fluida yang mana akan timbul tekanan. Tekanan dalam pipa masuk ke dalam transmitter (tekanan proses/ sinyal proses) dan oleh transmitter sinyal proses di rubah kedalam bentuk signal instrument lalu di kirim kan ke transmitter dan controller. Output controller dapat mengatur bukaan control valve untuk mengatur aliran fluida dalam pipa, sehingga tekanan aliran fluida dalam pipa dapat di atur sesuai dengan yang di inginkan oleh transmitter, controller dan control valve.
Gambar 4.2. Converter tekanan ke arus (P-I)
oleh sensor/ primary element, untuk di ubah menjadi suatu arus listrik standard 4-20mA. Gambar 4.2 mengilustrasikan sebuah bentuk comverter P-I menggunakan prinsip keseimbangan gaya. Sinyal tekanan masukan diaplikasikan ke bellow dan menghasilkan simpangan batangan. Sinyal elektrik yang berhubungan dengan penyimpangan di perbesar dan diterapkan sebagai arus lewat sebuah kumparanuntuk menghasilkan torsi yang membawa batang kembali ke posisi nol. Pada keseimbangan gaya dari bellow (proposional dengan tekanan sinyal masukan).
Offset nol (4mA) dalam sinyal elektrik cukup besar untuk menggerakkan amplifier pada gambar 4.2, sehingga memungkinkan kedua kawat sinyal juga berfungsi sebagai jaringan pasokan. Hal ini di kenal sebagai operasi dua kawat, kebanyakan converter P-I beroperasi pada kisaran tegangan yang lebar (misalnya, 15-30V). Seringkali sinyal arus sebesar 4 -20mA di konversi menjadi sinyal tegangan (biasanya dalam jangkauan 1-5V) dengan sebuah resistor seri sederhana.
IV.5.. Faktor-faktor Yang Mempengaruhi Plat Orifice Beroperasi
Seperti kita ketahui bahwa setiap kendali flow rate (alat ukur aliran) terkadang tidak bekerja dengan baik dikarenakan terjadi kesalahan pada plat orifice. Adapun faktor-faktor yang dapat mempengaruhi palt orifice bekerja antara lain :
1. Kerapatan (densitas) dari caiaran
2. Temperatur
3. Tekanan (gas)
5. Aliran yang tidak konstan (osilasi)
6. Kesalahan pemasangan pipa
7. Ketidak telitian pembuatan plat orifice
8. Adanya gas yang terjebak dalam cairan
IV.6. Data Hasil Pengamatan
Untuk itu dapat dilihat pada contoh hasil yang dikonversikan ke Kg/cm2
perbedaan tekanan (∆P).
Contoh hasil yang dikonversikan ke m3/detik sebagai berikut : Diketahui :
1 liter/jam = 10-3 m3
1 jam = 3600 sec
Maka untuk debit aliran (Qp) 500 liter/jam (Bukaan CV 100%) ialah :
Contoh tabel hasil konversi perbedaan tekanan (∆P) dan debit aliran (Qp) :
Perbedaan
7. Ukuran Pipa
Jenis : PVC Paralon dan Pipa besi bulat Kurang dari : 100mm
Lebih dari : 200 mm 8. Ukuran Plat Orifice
Jenis :Eccentric Orifice
BAB V
KESIMPULAN DAN SARAN
A. KesimpulanDari hasil penelitian di lapangan dan perhitungan yang sudah dilakukan maka penulis dapat menarik kesimpulan sebagai berikut :
1. Sistim mekanisme pengaturan laju aliran dengan menggunakan plat orifice
ini merupakan suatu cara untuk mendapatkan besarnya jumlah aliran berdasarkan beda tekanan dalam suatu proses.Besarnya jumlah aliran yang terukur ini terjadi karena adanya beda tekanan yang terjadi pada up-stream dan down-stream pada plat orifice yang dihubungkan dengan indicator transmitter.
2. Debit aliran fluida dari hasil pengukuran (praktek) lebih kecil dari harga teori. Hal ini di sebabkan oleh adanya faktor rugi-rugi yang terjadi pada pipa aliran akibat adanya fitting seperti sambungan-sambungan pipa, belokan, katup, reducer, pompa dan juga karena pemakaian yang berkesinambungan.
B. Saran
DAFTAR PUSTAKA
1. C.S Rangan “Instrumentation” Devices and Systems New Delhi
2. Ir. H. Mansyur, Msi “Instrumentasi I & II, Fakultas Teknik Program D-IV USU – Medan 2005.
3. Ir. H. Mansyur, Msi “Instrumentasi dan Alat Ukur” Departemen