PENGGUNAAN DIFFERENTIAL PRESSURE TRANSMITTER UNTUK MENGUKUR LEVEL AIR PADA TANGKI
O L E H
NIKO MANURUNG 025203008
PROGRAM D-IV TEKNOLOGI INSTRUMENTASI PABRIK FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
PENGGUNAAN DIFFERENTIAL PRESSURE TRANSMITTER UNTUK MENGUKUR LEVEL AIR PADA TANGKI
Oleh :
NIKO MANURUNG 02 5203 008
Disetujui Oleh :
Pembimbing
Drs. Hasdari Helmi, MT
Nip. 131 653 979
Diketahui oleh :
Ketua Program D-IV Teknologi Instrumentasi Pabrik Fakultas Teknik USU
Prof. Dr. Ir. Usman Ba’afai Nip. 130 365 322
PROGRAM D-IV TEKNOLOGI INSTRUMENTASI PABRIK FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
KATA PENGATAR
Puji dan syukur kepada Tuhan Yang Maha Esa, atas berkat dan
rahmat-Nya selama penyusunan Karya Akhir ini, sehingga penulis dapat menyelesaikan
Karya Akhir ini.
Dalam Karya Akhir ini penulis mencoba untuk membahasa tentang
Penggunaan Differential Pressure Transmitter untuk Mengukur Level Air pada
Tangki. Dalam menyelesaikan Karya Akhir ini penulis menghadapi berbagai
kesulitan-kesulitan, namun berkat bantuan berbagai pihak maka kesulitan itu lebih
mudah diselesaikan. Untuk itu dalam kesempatan ini penulis ingin menyampaikan
terima kasih yang sebesar-besarnya kepada:
1. Ayahanda Ir. M. Manurung dan Ibunda T. Pasaribu, BA tercinta yang telah
memberikan bantuan baik moril maupun materi, serta doa-doanya.
2. kakak saya Menaria, ST dan adik saya Fernando.
3. Bapak Dr. Armansyah Ginting, M.Eng selaku Dekan Fakultas Teknik.
4. Bapak Prof. Dr. Ir. Usman. S. Baafai, selaku ketua Program Studi
Instrumentasi Pabrik.
5. Bapak Drs. Hasdari Helmi, MT selaku Sekretaris Program Studi
Instrumentasi Pabrik dan Dosen Pembimbing.
6. Bapak Ir. Mustafrind Lubis selaku Dosen Wali.
7. Seluruh Dosen dan Civitas Akademik Teknologi Instrumentasi Pabrik.
9. Rekan-rekan Mahasiswa stambuk “02” dan “01” di Instrumentasi Pabrik,
yang selalu menemani mulai dari awal kuliah sampai penulisan Karya
Akhir ini selesai.
10.Semua pihak yang telah banyak memberikan bantuan.
Penulis menyadari bahwa Karya Akhir ini masih banyak kekurangan baik
dari penyusun kata-kata maupun tata bahasanya. Maka dengan kerendahan hati,
penulis mohon maaf apabila ada kesalahan-kesalahan yang tidak berkenan dalam
penulisan Karya Akhir ini.
Medan, Desember 2007
Hormat Saya,
ABSTRAK
Pemakaian alat-alat instrumen pada saat ini sangat dibutuhkan terutama
pada industri. Salah satu contoh dari alat instrumen adalah transmitter, dimana
transmitter itu terdiri dari transmitter elektrik dan transmitter pneumatik.
Transmitter adalah suatu alat yang digunakan untuk mengubah atau mengirimkan
sinyal dari alat perasa (sensor) ke kontroller dan dari kontroller ke pengatur akhir.
Dalam hal ini akan dibahas tentang pengukuran level cairan, dimana yang diukur
adalah ketinggian air dengan menggunakan differential pressure transmitter, yang
dilengkapi dengan peralatan instrumentasi lain seperti recorder, meterbodi, digital
manometer, gelas penduga, pressure gage.
Dari Pengukuran level air dengan menggunakan differential pressure
transmitter diperoleh hasil pengukuran level air sebanding dengan tekanan,
dimana pada level tangki 600 mmH2O mempunyai tekanan sebesar 1,0 kg/cm2,
DAFTAR ISI
Halaman
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
DAFTAR TABEL...viii
DAFTAR GRAFIK...ix
BAB I. PENDAHULUAN I.1. Latar Belakang ... 1
I.2. Tujuan Pembahasan ... 2
I.3. Batasan Masalah ... 2
I.4. Tinjauan Pustaka ... 3
I.5. Metode Pembahasan ... 3
I.6. Sistematika Penulisan ... 4
BAB II. TEORI SISTEM KONTROL II.1. Sistem Kontrol ... 6
II.1.1. Manual dan Otomatis ... 7
II.1.2. Jaringan Terbuka dan Tertutup ... 7
II.2. Karakteristik Sistem Kontrol Otomatik ... 11
II.3. Pemakaian Sistem Kontrol ... 12
II.4. Transduser ... 14
II.5. Alat-alat Kontrol ... 15
II.5.1. Alat Kontrol Tipe Proportional ... 15
II.5.2. Alat Kontrol Tipe Integral ... 17
II.5.3. Alat Kontrol Tipe Differential... 18
BAB III. DIFFERENTIAL PRESSURE TRANSMITTER III.1. Differential Pressure Transmitter ... 19
III.2. Prinsip Kerja Differential Pressure Transmitter ... 23
BAB IV ANALISA DIFFERENTIAL PRESSURE TRANSMITTER PADA TANGKI IV.1. Dasar Pengukuran Level Cairan ... 31
IV.2. Metoda Pengukuran Tinggi Permukaan Cairan ... 31
IV.2.1. Metoda Pengukuran Langsung ... 32
IV.2.2. Metoda Pengukuran secara Tidak Langsung ... 34
IV.3. Penempatan Transmitter ... 37
IV.4. Peralatan Pengoperasian Differential Pressure Transmitter... 40
IV.4.1. Tangki ... 40
IV.4.2. Pressure Gage ... 41
IV.4.3. Control Valve ... 44
IV.4.5. Air Regulator ... 47
IV.4.6. Recorder ... 47
4.5. Keterpasangan Peralatan ... 48
4.6. Hubungan antara Tekanan dan Tinggi Level Tangki yang diukur ... 51
4.7. Faktor-faktor yang mempengaruhi Transmitter saat beroperasi ... 52
BAB V PENUTUP 5.1. Kesimpulan ... 54
5.2. Saran ... 54
DAFTAR PUSTAKA... 55
DAFTAR GAMBAR
Halaman
Gambar 2.1. Sistem Kendali Terbuka...8
Gambar 2.2. Sistem Kendali Tertutup...9
Gambar 2.3. Servo dan Regulator...10
Gambar 2.4. Diagram Blok Sistem Pengontrolan...12
Gambar 3.1. Pengukuran Dengan Tekanan Dasar...19
Gambar 3.2. Pengukuran Dengan Beda Tekanan...20
Gambar 3.3. Pengukuran Dengan Menggunakan Sealling Liquid...21
Gambar 3.4. Skematik Potongan Meterbodi sebuah Transmitter...24
Gambar 3.5. Skematik Pneumatik Transmitting Unit...28
Gambar 4.1. Pengukuran Langsung...32
Gambar 4.2. Metode Pengukuran secara Tidak Langsung...34
Gambar 4.3. Pengukuran dengan Alat Ukur Beda Tekanan...35
Gambar 4.4. Pengukuran dengan Metoda Jebakan Udara...36
Gambar 4.5. Pengukuran dengan Metoda Kotak Udara...37
Gambar 4.6. Differential Pressure Transmitter...39
Gambar 4.7. Control Valve dan bagian-bagiannya...45
Gambar 4.8. Chart Recorder...48
DAFTAR TABEL
Halaman
Tabel 3.1. Massa Jenis Cairan...30
Tabel 4.1. Harga yang Menyatakan Hubungan antara Level dengan Tekanan
DAFTAR GRAFIK
Halaman
ABSTRAK
Pemakaian alat-alat instrumen pada saat ini sangat dibutuhkan terutama
pada industri. Salah satu contoh dari alat instrumen adalah transmitter, dimana
transmitter itu terdiri dari transmitter elektrik dan transmitter pneumatik.
Transmitter adalah suatu alat yang digunakan untuk mengubah atau mengirimkan
sinyal dari alat perasa (sensor) ke kontroller dan dari kontroller ke pengatur akhir.
Dalam hal ini akan dibahas tentang pengukuran level cairan, dimana yang diukur
adalah ketinggian air dengan menggunakan differential pressure transmitter, yang
dilengkapi dengan peralatan instrumentasi lain seperti recorder, meterbodi, digital
manometer, gelas penduga, pressure gage.
Dari Pengukuran level air dengan menggunakan differential pressure
transmitter diperoleh hasil pengukuran level air sebanding dengan tekanan,
dimana pada level tangki 600 mmH2O mempunyai tekanan sebesar 1,0 kg/cm2,
BAB I PENDAHULUAN
I.I. Latar Belakang Pemilihan Judul
Pembangunan industri nasional secara mendasar memerlukan tenaga
terdidik yang baik dan terampil, dengan keahlian tertentu dalam bidang kimia
industri baik pada tingkat perguruan tinggi maupun tingkat professional. Peralatan
instrumen tidak hanya sebagai alat pengukur saja, disamping itu juga sebagai alat
pengendali dimana kedua fungsi tersebut saling terkait satu dengan yang lain.
Transmitter merupakan salah satu dari peralatan instrumentasi proses kontrol yang
terdapat pada suatu pabrik. Sedangkan transmitter itu sendiri dipergunakan untuk
mengubah atau mengirimkan sinyal dari alat perasa (sensor) ke kontroler dan dari
kontroler ke pengatur akhir.
Setiap proses selalu mempunyai “keadaan yang diinginkan” dan suatu
“keadaan yang sedang berlangsung”. Agar keadaan yang diinginkan sama dengan
keadaan yang sedang berlangsung, maka pengontrolan harus dilakukan. Untuk itu
diperlukan suatu alat pengatur.
Adapun gambaran permasalahan, yang diperoleh sebelum merancang
peralatan instrumen pengukur level cairan pada tangki menggunakan differential
pressure transmitter adalah keterpasangan peralatan instrumentasi pengukuran
pada posisinya masing-masing, guna mendapatkan ketelitian atau keakuratan
dalam memberikan hasil bacaan.
Melihat pentingnya peranan kendali pengukuran level cairan di tangki
diambil langkah-langkah agar pengukuran level cairan pada tangki tersebut sesuai
dengan keadaan yang sebenarnya karena apabila peralatan instrumen mengalami
gangguan akan memberikan informasi yang tidak sesuai dengan keadaan
sebenarnya. Hal ini akan mengganggu proses pengolahan, bahkan dapat merusak
kualitas produksi yang dapat mengakibatkan operasi pabrik terhambat.
Berdasarkan uraian diatas, maka penulis tertarik untuk membahas
permasalahan tersebut, dan mengambil judul “PENGGUNAAN
DIFFERENTIAL PRESSURE TRANSMITTER UNTUK MENGUKUR LEVEL AIR PADA TANGKI”.
Aplikasi Laboratorium Instrumentasi PTKI
I.2. Tujuan Pembahasan.
Adapun tujuan pembahasan Karya Akhir ini adalah:
1. Untuk mengetahui prinsip dan cara pengukuran level cairan pada tangki
dengan menggunakan differential transmitter pneumatik
2. Untuk mengetahui penggunaan peralatan instrumentasi proses
I.3. Batasan Masalah
Agar pembahasan masalah ini tidak terlalu luas dan ruang lingkup
pembahasan ini terarahkan, maka penulis membatasi permasalahan hanya dalam:
1. Keterpasangan peralatan instrumen pengukuran level cairan pada tangki
dan pendiagnosaan dari aksi kerja pneumatic pressure transmitter.
2. Untuk mengetahui faktor-faktor yang mempengaruhi differential
3. Mengetahui prinsip kerja dari Differential Pressure Transmitter.
I.4. Tinjauan Pustaka
Kemajuan ilmu pengetahuan dan teknologi berkembang sangat pesat,
dimana peralatan-peralatan modern diciptakan untuk mempermudah dan
mempercepat suatu proses dan kerja terutama dalam pabrik. Peralatan
instrumentasi yaitu sebagai alat pengukur dan pengendali. Adapun variabel proses
yang diukur dalam pabrik antara lain: tekanan, level, aliran dan temperatur.
Dalam sistem kerja transmitter tidak lepas dari kerusakan dan
gangguan-gangguan seperti goncangan, getaran, dan suhu yang lebih tinggi sehingga
menyebabkan pencatatan yang tidak normal serta kerusakan pada peralatan
instrumen. Apabila ada kesalahan pada transmitter yang digunakan maka proses
pengontrolan tidak dapat dilakukan, karena sinyal yang diberikan oleh transmitter
tersebut tidak sesuai dengan besaran yang terjadi pada proses sehingga dapat
menimbulkan terjadinya masalah dalam proses tersebut.
Untuk penunjukkan yang bersifat remote, biasanya digunakan alat bantu
sebagai penguat dan penerjemah output dari sensor kedalam bentuk sinyal standar.
Peralatan semacam inilah yang dalam sistem instrumentasi pengendalian proses
yang dikenal dengan “Transmitter”.
I.5. Metode Pembahasan
Dalam membahas suatu objek, kelengkapan data suatu objek merupakan
bagian yang harus dipenuhi. Untuk melengkapi data tersebut maka penulis
1. Secara teoritis
Mengumpulkan data dan mencari data spesifikasi yang diperlukan tentang
differential pressure transmitter, serta mencari buku-buku yang sesuai dengan
topik bahasan penulis dan studi kepustakaan.
2. Secara praktis
Dengan melakukan pengamatan dilapangan.
I.6. Sistematika Pembahasan
Untuk mempermudah pemahaman dan pembahasan penyusun membuat
sistematika pembahasan dengan urutan sebagai berikut:
BAB I. PENDALUHUAN
Pada bab ini menjelaskan tentang yaitu latar belakang masalah, tujuan
pembahasan, batasan masalah, tinjauan pustaka, metode pembahasan,
sistematika penulisan.
BAB II. DASAR SISTEM KONTROL
Pada bab ini menjelaskan tentang sistem kontrol, karakteristik sistem
kontrol otomatik, pemakaian sistem kontrol, transduser, alat-alat kontrol.
BAB III. DIFFERENTIAL PRESSURE TRANSMITTER
Pada bab ini membicarakan tentang differential pressure transmitter,
BAB IV. ANALISA DIFFERENTIAL PRESSURE TRANSMITTER PADA TANGKI
Pada bab ini menjelaskan tentang dasar pengukuran level cairan, metoda
pengukuran tinggi permukaan cairan, penempatan transmitter, peralatan
pengoperasian differential pressure transmitter, keterpasangan peralatan,
hubungan antara tekanan dan tinggi level tangki yang diukur, faktor-faktor
yang mempengaruhi transmitter saat beroperasi.
BAB V. KESIMPULAN DAN SARAN
Dalam bab ini membahas tentang kesimpulan dan saran-saran mengenai isi
BAB II
DASAR SISTEM KONTROL
II.I. Sistem Kontrol
Sistem kontrol adalah proses pengaturan ataupun pengendalian terhadap
satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu
harga atau dalam suatu rangkuman harga (range) tertentu. Dalam, istilah lain
disebut juga teknik pengaturan, sistem pengendalian atau sistem pengontrolan.
Ditinjau dari segi peralatan, sistem kontrol terdiri dari berbagai susunan
komponen fisis yang digunakan untuk mengarahkan aliran energi ke suatu mesin
atau proses agar dapat menghasilkan prestasi yang diinginkan.
Tujuan utama dari suatu sistem pengontrolan adalah untuk mendapatkan
optimisasi dimana hal ini dapat diperoleh berdasarkan fungsi daripada sistem
kontrol itu sendiri, yaitu: pengukuran (measurement), membandingkan
(comparison), pencatatatan dan perhitungan (computation), dan perbaikan
(correction).
Secara umum sistem kontrol dapat dikelompokkan sebagai berikut:
1. Dengan operator (manual) dan otomatik.
2. Jaringan tertutup (closed loop) dan jaringan terbuka (open loop).
3. Servo dan regulator.
4. Menurut sumber penggerak: elektris, pneumatis (udara, angin), hidraulis
Pengontrolan secara elektrik dan pneumatik atau kombinasinya lebih
banyak ditemukan dalam industri maupun aplikasi teknis lainnya. Hal ini
disebabkan beberapa kelebihan yang diberikannya yaitu pemakaian daya yang
lebih kecil, kemampuan untuk pengontrolan jarak jauh, lebih mudah diperoleh dan
responsnya lebih cepat. Disamping itu dimensi peralatan dapat dibuat lebih kecil.
II.I.1. Manual dan Otomatis
Pengontrolan secara manual adalah pengontrolan yang dilakukan oleh
manusia yang bertindak sebagai operator, sedang pengontrolan secara otomatis
adalah pengontrolan yang dilakukan oleh mesin-mesin atau peralatan yang bekerja
secara otomatis dan operasinya dibawah pengawasan manusia. Pengontrolan
secara manual banyak ditemukan dalam kehidupan sehari-hari seperti pada
penyetelan suara radio, televisi, pengaturan cahaya televisi, pengaturan aliran air
melalui keran, pengaturan kecepatan kendaraan, dan lainnya.
Pengontrolan secara otomatis banyak ditemui dalam proses industri,
pengendalian pesawat, pembangkit tenaga listrik. Sebagai contoh adalah
pengaturan aliran, temperatur dan tekanan dengan menggunakan katup pengatur,
pengontrolan suhu ruangan oleh thermostat, pengontrolan daya listrik oleh relay,
circuit-breaker (pemutus atus).
II.1.2. Jaringan Terbuka dan Tertutup
Sistem terbuka adalah sistem kontrol dimana keluaran tidak memberikan
efek terhadap besaran masukan, sehingga variabel yang dikontrol tidak dapat
Sistem G(s)
x
y
Gambar 2.1. Sistem Kendali Terbuka
Dimana: X = Sinyal Masukan
Y = Sinyal Keluaran
Hubungan antara fungsi masukan, fungsi alih sistem dan fungsi keluaran :
X Y
= G
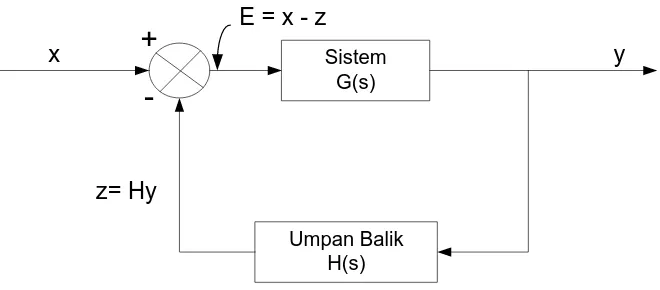
Sistem kontrol dengan jaringan tertutup adalah sistem pengontrolan
dimana besaran keluaran memberikan efek terhadap besaran masukan sehingga
besaran yang dikontrol dapat dibandingkan terhadap harga yang di inginkan
melaui alat pencatat (indicator atau recorder) seperti pada Gambar 2.2.
Selanjutnya perbedaan harga yang terjadi antara besaran yang dikontrol dan
penunjukan alat pencatat digunakan sebagai koreksi yang pada gilirannya akan
merupakan sasaran pengontrolan. Sistem kontrol tertutup mempunyai banyak
keunggulan dibanding sistem kontrol terbuka, yaitu mempunyai tingkat ketepatan
yang lebih tinggi, dan tidak peka terhadap gangguan, dan perubahan pada
Sistem
Gambar 2.2. Sistem Kendali Tertutup
Hubungan antara fungsi masukan, fungsi alih sistem, fungsi umpan balik
dan fungsi keluaran :
Z = HY, mempunyai nilai negatif dan harus dikurangkan dari tegangan masukan
sehingga menghasilkan masukan pada penguat itu sebesar E = X = Z
II.I.3. Servo dan Regulator
Sebuah regulator adalah bentuk lain daripada servo. Istilah ini digunakan
untuk menunjukan sistem dalam mana terdapat harga “steady state” konstan untuk
sinyal masukan yang konstan. Perbedaan utama adalah bahwa pada regulator
diberikan sinyal tambahan (sinyal gangguan, u) sehingga akan menghasilkan
keluaran yang berbeda dengan servo seperti pada Gambar 2.3. Istilah regulator
diperoleh dari pemakaiannya mula-mula yaitu sebagai pengontrol kecepatan dan
tegangan, yang disebut pengatur kecepatan dan pengatur tegangan.
Pada servo diinginkan: r (t)≈c(t) →1;
sedang pada regulator diinginkan:
u
Dimana: r(t) = Sinyal Referensi Masukan
c(t) = Sinyal Referensi Keluaran
u = Gangguan
Pada regulator, efek gangguan ini perlu dikompensasi agar harga keluaran
tetap sama dengan masukan, dari persamaan diatas:
u t c t
r( )− ( )
≈0; sehingga yang akan diperoleh adalah,
r(t) - c(t) ≈0 atau
r(t) = c(t), yaitu masukan = keluaran
II.2. Karakterstik Sistem Kontrol
Beberapa karakteristik penting dari sistem kontrol otomatik adalah sebagai
berikut:
1. Sistem kontrol otomatik merupakan sistem dinamis (berubah terhadap
waktu) yang dapat berbentuk linear maupun non linear. Secara matematis
kondisi ini dinyatakan oleh persamaan-persamaan yang berubah terhadap
waktu, misalnya persamaan differensial linear maupun tidak linear.
2. Bersifat menerima informasi, memprosesnya, mengolahnya dan kemudian
mengembangkannya.
3. Komponen yang membentuk sistem kontrol ini akan saling mempengaruhi
(berinteraksi).
4. Bersifat mengembalikan sinyal ke bagian masukan (feedback) dan ini
digunakan untuk memperbaiki sifat sistem. Karena adanya pengembalian
sinyal ini (sistem umpan balik) maka pada sistem kontrol otomatik selalu
II.3. Pemakaian Sistem Kontrol
Pemakaian sistem kontrol otomatik banyak ditemui dalam kehidupan
sehari-hari baik dalam pemakaian langsung maupun tidak langsung.
Pemakaian sistem kontrol ini dapat dikelompokkan sebagai berikut:
1. Pengontrolan proses: temperatur, aliran, tekanan, tinggi permukaan cairan,
viskositas. Misalnya pada industri kimia, makanan, tekstil, pengilangan dan
lain-lain.
2. Pembangkit tenaga listrik (pengontrolan distribusi tenaga).
3. Pengontrolan numerik (numerical control, N/C): pengontrolan operasi yang
membutuhkan ketelitian tinggi dalam proses yang berulang-ulang. Misalnya:
pengeboran, pembuatan lubang, tekstil, pengelasan.
4. Transportasi: elevator, escalator, pesawat terbang, kereta api, conveyor (ban
berjalan), pengendalian kapal laut dan lain-lain.
5. Servomekanis.
6. Bidang non teknis, seperti: ekonomi, sosiologi, dan biologi.
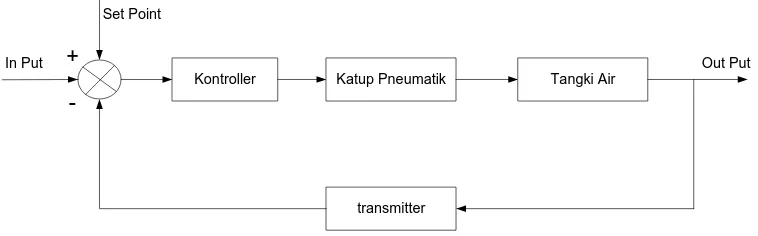
Berikut ini adalah diagram blok dari proses pengontrolan level dengan
menggunakan differential pressure transmitter, ialah:
Pada Gambar 2.4. bagian kontroller mempunyai summing junction dengan
tanda positif-negatif, di titik inilah langkah membandingkan dilakukan dengan
mengurangi besaran set point dengan sinyal measurement variable, hasilnya
adalah sinyal yang disebut error.
Hampir semua sistem pengendalian selalu dimulai dengan menampilkan
blok diagram sistem pengontrollan otomatis. Secara umum elemen sistem
kontrolnya, ialah:
1. Feedback adalah sistem pengendali otomatis yang mempunyai dua
summing junction yaitu positif feedback dan negatif feedback.
2. Proses (process) adalah tatanan peralatan yang mempunyai suatu fungsi
tertentu. Input proses dapat bermacam-macam, yang pasti ia merupakan
besaran yang dimanipulasi oleh final control element atau control valve
agar measurement variable sama dengan set point. Input proses ini juga
disebut manipulated variable.
3. Transmitter adalah alat yang berfungsi untuk membaca sinyal sensing
element, dan mengubahnya menjadi sinyal yang dapat dimengerti oleh
kontroller.
4. Set point adalah besaran proses variabel yang dikehendaki. Sebuah
kontroller akan selalu berusaha menyamakan controlled variable dengan
set point.
5. Error adalah selisih antara set point dikurangi measured variable. Error
bisa negatif dan bisa juga positif. Bila set point lebih besar dari measured
variable, error akan menjadi positif, sebaliknya bila set pointnya lebih
6. Kontroller adalah elemen yang mengerjakan tiga dari empat tahap langkah
pengendalian, yaitu membandingkan set point dengan measurement
variable, menghitung berapa banyak koreksi yang perlu dilakukan, dan
mengeluarkan sinyal koreksi sesuai dengan hasil perhitungan tadi,
kontroller sepenuhnya menggantikan peran manusia dalam mengendalikan
sebuah proses.
II.4. Transduser
Transduser (transducer) adalah sebuah alat yang mengubah satu bentuk
daya menjadi bentuk daya lainnya untuk berbagai tujuan termasuk pengubahan
ukuran atau informasi. Transduser bisa berupa peralat
transduser kadang-kadang juga didefinisikan sebagai suatu peralatan yang
mengubah suatu bentuk sinyal menjadi bentuk sinyal lainnya. Pada umumnya
adalah mengubah besaran-besaran fisis tersebut menjadi besaran listrik; misalnya:
tekanan, temperatur, aliran, posisi, dan lain-lain. Contoh yang umum adalah
pengeras suara (audio speaker), yang mengubah beragam voltase listrik yang
berupa musik atau pidato, menjadi vibrasi mekanis. Contoh lain adala
yang mengubah suara kita, bunyi, atau energi akustik menjadi sinyal atau energi
listrik
Transduser atau sensor adalah salah satu bagian dari komponen sistem
pengaturan. Sensor yang digunakan sebagai elemen yang langsung mengadakan
kontak dengan yang diukur; sedang transduser berfungsi untuk mengubah besaran
II.5. Alat-alat Kontrol
Jika sebuah sistem kontrol adalah stabil dan hanya memerlukan perbaikan
respons (misalnya mengurangi atau menghilangkan ess (penyimpangan dalam
keadaan mantap) atau memperbesar kecepatan respons) maka yang dilakukan
adalah penggunaan alat-alat kontrol dari jenis P (proportional), I (integral), atau
D (differential).
Jenis-jenis Alat kontrol ini terdiri dari :
a. Alat kontrol tipe P (proporsional)
b.Alat kontrol tipe I (integral)
c.Alat kontrol tipe D (differensial)
kontroller Proporsional, Integral, dan differensial dalam prakteknya dapat
digabung menjadi satu kontroller yang disebut kontroller Proportional plus
Integral plus Derivative ( P + D + I).
II.5.1. Alat Kontrol Tipe Proporsional (Proportional Control)
Pada jenis ini terdapat hubungan kesebandingan antara keluaran terhadap
kesalahan, yaitu:
m(t) = K e(t), dimana K disebut konstanta kesebandingan.
Pertambahan harga K akan menaikkan penguatan sistem ess(penyimpangan
dalam keadaan mantap). Pemakaian alat kontrol jenis ini saja sering tidak
tetapi juga cenderung mengakibatkan ketidakstabilan. Disamping itu pertambahan
K adalah terbatas dan tidak cukup untuk mencapai respons sampai suatu harga
yang diinginkan.
Kenyataannya dalam usaha mengatur harga K terdapat keadaan-keadaan
yang bertentangan. disatu pihak diinginkan mengurangi esssebanyak mungkin,
tetapi hal ini akan mengakibatkan osilasi bagi respons yang berarti memperlama
”settling-time”, sedang di pihak lain respons terhadap setiap perubahan masukan
harus terjadi secepat mungkin tetapi dengan lonjakan dan osilasi sekecil mungkin.
Respons yang cepat memang dapat diperoleh dengan memperbesar K, tetapi hal
ini juga akan mengakibatkan ketidakstabilan sistem.
Untuk mengatasi masalah-masalah ini, alat pengontrol yang akan
digunakan harus mempunyai persyaratan berikut:
a. Penguatan yang tinggi pada frekuensi-frekuensi yang sangat rendah (untuk
mengurangi kesalahan-kesalahan)
b. Penguatan yang tinggi pada frekuensi-frekuensi tinggi (yakni dengan
secepatnya mengikuti perubahan masukan bila laju perubahan transien adalah
yang paling cepat). Hal ini perlu untuk menjamin respons yang cepat.
c. Pada frekuensi-frekuensi menengah (yakni dalam bagian terakhir respons
transien dan sebelum “on set” (kondisi-kondisi mantap) penguatan sebaiknya
cukup rendah agar terjamin respons yang tidak mengalami lonjakan yang
berlebihan dan juga setiap kecenderungan berosilasi akan diredam dengan
II.5.2. Alat Kontrol Tipe Integral (I)
Alat kontrol jenis ini (integral control, I) dimaksudkan untuk
menghilangkan kesalahan posisi dalam kondisi mantap (steady position error)
tanpa mengubah karakteristik-karakteristik frekuensi tinggi dan hal ini dapat
dicapai dengan memberikan penguatan tak terhingga pada frekuensi nol yakni
pada kondisi mantap.
Alat kontrol ini biasanya digunakan bersama tipe P dan D, namum dalam
hal-hal dimana kecepatan respons dan ketidakstabilan bukan merupakan masalah,
tipe P +I adalah cukup. Walaupun demikian, penambahan tipe P perlu mendapat
perhatian karena efeknya mengurangi kestabilan yakni karena mengakibatkan
bertambahnya keterlambatan fasa (phase-lag).
Alat kontrol jenis I dapat berupa peralatan pneumatik, hidraulik,
elektronik. Bagian integral (I) menunjukkan bahwa tindakan pengontrolan akan
terus bertambah selama terjadi kesalahan dan bila sinyal penggerak (actuating
signal, m(t)) yang cukup telah terakumulir, maka sinyal e(t) akan menurun
menuju nol. Melalui pemilihan komponen rangkaian yang tepat, lokasi frekuensi
nol dan frekuensi pojok dapat direncanakan agar pengontrolan secara integral (I)
hanya efektif pada frekuensi-frekuensi rendah sedang tipe P nya memiliki
penguatan yang konstan serta menghasilkan kestabilan pada frekuensi menengah
dan frekuensi yang lebih tinggi.
II.5.3. Alat Kontrol Tipe Differnsial (D)
Alat kontrol jenis ini (disebut juga “rate-control”) digunakan untuk
Alat ini selalu disertai oleh tipe P, sedang tipe I hanya digunakan bila diperlukan.
Diikut sertakannya tipe D ini sebagai alat kontrol memberikan efek menstabilkan
sistem dengan cara memperbesar “phase-lead” terhadap penguatan loop kontrol
yakni dengan mengurangi “phase-lead” terhadap penguatan loop kontrol yakni
dengan mengurangi “phase-lag” penguatan tersebut.
Alat kontrol ini sangat bermanfaat sebab responnya terhadap laju
perubahan kesalahan menghasilkan koreksi yang berarti sebelum kesalahan
tersebut bertambah besar, jadi efeknya adalah menghasilkan tindakan
pengontrolan yang cepat. Hal ini sangat penting bagi sistem kontrol yang
perubahan bebannya terjadi secara tiba-tiba, karena dapat menghasilkan sinyal
pengontrol selama kesalahan (error) berubah. Karena tipe D ini melawan
perubahan-perubahan yang terjadi dalam keluaran yang dikontrol, efeknya adalah
menstabilkan sistem loop tertutup dan ini dapat meredam osilasi yang mungkin
terjadi.
Penting diperhatikan bahwa tipe D ini tidak dapat dipakai secara tersendiri
karena tidak akan memberi jawaban (respons) terhadap suatu kesalahan dalam
kondisi mantap. Dengan demikian alat ini harus digabung dengan tipe P atau
BAB III
DIFFERENTIAL PRESSURE TRANSMITTER
III.1. Differential Pressure Transmitter
Differential pressure transmitter (transmitter beda tekanan) kerap kali
dipakai untuk mengukur tekanan. Bila sebuah bejana ditutup atau kedap udara,
tekanan dasar (P) berubah tidak hanya menurut tinggi permukaan cairan (h), tetapi
juga pada tekanan fase gas (PG) seperti Gambar 3.1.
P = PG + ph
p
h
P
GP
Gambar 3.1. Pengukuran Dengan Tekanan Dasar
Tekanan hidrostatik pada dasar suatu bejana tergantung pada berat jenis
dan ketinggian cairan. Tekanan ini di ukur dengan manometer, pada bejana
tertutup dan bertekanan, yang di ukur adalah beda tekanan antara dasar bejana dan
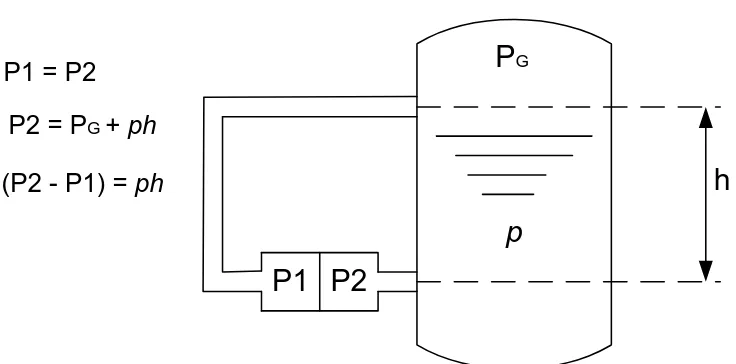
Karena itu, tinggi permukaan cairan (h) tidak dapat didapat hanya dengan
mengukur tekanan dasar (P). Seperti pada Gambar 3.2 tinggi permukaan cairan (h)
didapatkan dengan beda tekanan antara tekanan fase gas (PG) dan tekanan (P2),
jadi:
P1 = P2
P2 = PG + ph
(P2 - P1) = ph
p
h
P
GP1 P2
Gambar 3.2. Pengukuran Dengan Beda Tekanan
Cara ini tergantung pada berat jenis. Elemen perasa dari detektor ini
adalah diafrakma. Detektor ini tidak mempunyai batang pemuntir dengan gerak
memuntir, melainkan hanya mempunyai batang lentur yaitu batang penghubung
yang menghubungkan diafrakma dengan batang gaya. Detektor beda tekanan
terdiri dari dua ruangan yaitu ruang tekanan tinggi dan ruang tekanan rendah.
Untuk level transmitter, ruang tekanan tinggi di hubungkan dengan tekanan cairan
pada bejana, sedangkan ruang tekanan rendah di hubungkan dengan tekanan uap
Untuk pengukur permukaan cairan ini, bila terdapat uap yang dapat
mengembun pada fase gas, kondesat berkumpul di dalam pipa penyalur dibagian
tekanan rendah, jadi tidak memungkinkan pengukuran yang teliti.
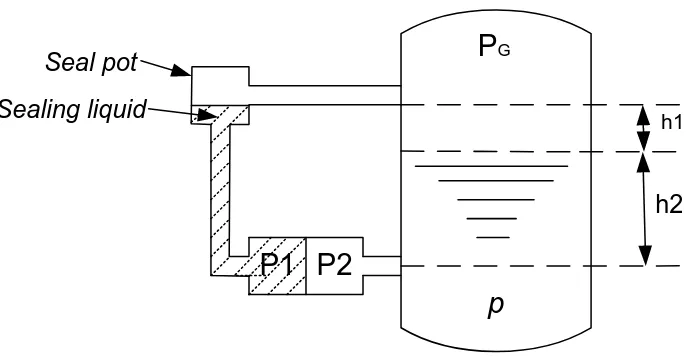
Dalam hal ini, metoda yang dipakai adalah dengan mengisi lebih dulu pipa
penyalur dengan cairan yang secara kimia bersifat stabil dan tidak berpengaruh
buruk terhadap proses, cairan itu disebut sealing liquid. Alat pengukuran itu
dilengkapi dengan seal pot seperti pada Gambar 3.3.
p
P
GP1 P2
h1
h2
Sealing liquid Seal pot
Gambar 3.3. Pengukuran Dengan Menggunakan Sealing Liquid
Tekanan tinggi sealing liquid ditambahkan pada tekanan PG.
P1= PG + ρ S (h1+ h2)
Dimana: s = kerapatan sealing liquid
Beda tekanan didapatkan sebagai berikut:
∆P = P2- P1
= ρh + ρ S (h1+ h2)
Bila kerapatan sealing liquid (ρ S) dan tinggi (h1+ h2) diketahui, tinggi
permukaan cairan (h2) didapatkan dengan cara mengukur beda tekanan.
Dengan kata lain, sistem tersebut bekerja dimana perbedaan tekanan antara
fasa uap dan bagian terendah dari cairan diukur oleh differential pressure
transmitter dan selanjutnya diperoleh permukaan cairan.
Differensial tersebut memindahkan perbedaan tekanan yang diukur ke
dalam suatu sinyal pneumatik (0,2 sampai 1,0 kg/cm2) atau sinyal listrik (4
sampai 20 mA) dan memancarkannya ke kontroller, indikator dan lain sebagainya
dalam ruang kendali.
Cairan-cairan proses mempunyai kecenderungan untuk berubah menjadi
padatan pada waktu di dinginkan ataupun apabila ia mengandung pertikel-partikel
dan karenanya mempunyai kecenderungan untuk terjadinya penyumbatan,
digunakan suatu differential pressure transmitter yang di pasang pada flensa.
Karena transmitter ini dipasang langsung flensa dari bejana, maka tidak di
butuhkan suatu jalur dan hal ini akan membantu mencegah terjadinya
penyumbatan. Bagaimanapun juga tipe ini mempunyai satu cacat yaitu tidak dapat
dilaksanakan suatu zero adjustment atau pelepasan dari transmitter tersebut,
kecuali bejana tersebut di kosongkan dengan cara shut down dari pabrik.
Transmitter beda tekanan melakukan fungsi, beda tekanan dan konversi
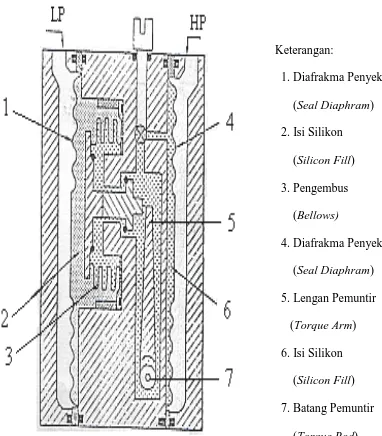
III.2. Prinsip Kerja Differential Pressure Transmitter
Transmitter merupakan alat atau kelanjutan dari sensor. Dimana
transmitter ini dapat merubah sinyal proses yang diterima oleh detektor diubah
menjadi sinyal listrik serta mengirimkan sinyal tersebut ke alat penerima seperti
pencatat (recorder), pengatur dan penunjuk.
Differential pressure transmitter mempunyai hubungan-hubungan ke tekanan
rendah dan tinggi seperti pada Gambar 3.4. Tekanan tinggi (HP) dan tekanan
rendah (LP) diterima oleh membran penyekat (seal diaphragm). Bagian dalam
dari membran penyekat (seal diaphragm) tekanan tinggi dan tekanan rendah diisi
dengan cairan silikon. Tekanan yang diukur pada bagian tekanan tinggi mendesak
dirinya sendiri pada membran bagian tekanan tinggi dan menekan membran
tersebut. Pada waktu membran tersebut tertekan, bagian dalam isian silikon
bergerak maju mengenai bagian pengembus (bellows) oleh sejumlah tekanan
sehubungan dengan gerakan membran tersebut. Pengembus tersebut mengembang
mengenai bagian bertekanan rendah (LP) oleh sejumlah pergerakan dari isian
silikon tersebut. Sementara itu, tekanan yang terukur pada bagian bertekanan
rendah (LP) juga akan mendesak dirinya sendiri pada membran bertekanan rendah
(LP) dan menekan pengembus tersebut dari bagian luar. Bagian puncak
pengembus tersebut bergerak ke bagian bertekanan rendah (LP) dan pengembus
tersebut berhenti mengembang. Dengan bergeraknya panjang bagian puncak dari
pengembus, maka lengan pemuntir tersebut akan bergerak ke kiri dan memutar
batang pemuntir tersebut. Pergerakan batang pemuntir ini diubah ke dalam suatu
Keterangan:
1. Diafrakma Penyekat
(Seal Diaphram)
2. Isi Silikon
(Silicon Fill)
3. Pengembus
(Bellows)
4. Diafrakma Penyekat
(Seal Diaphram)
5. Lengan Pemuntir
(Torque Arm)
6. Isi Silikon
(Silicon Fill)
7. Batang Pemuntir
(Torque Rod)
Gambar 3.4. Skematik Potongan Meterbodi sebuah Transmitter
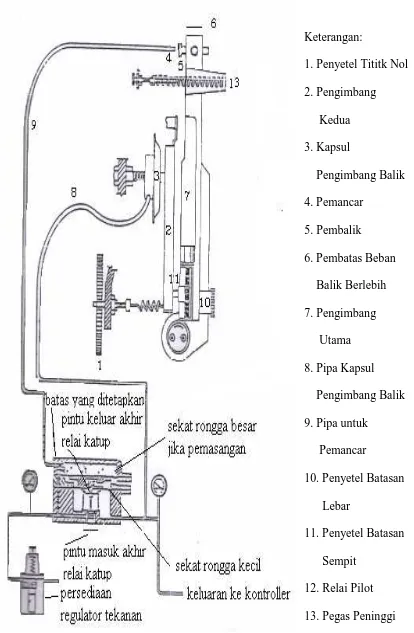
Setelah itu bagian pengirim, akan mengubah gerak-gerak mekanik detektor
transmitter pneumatik adalah transmitter gaya seimbang (Force Balance
Transmitter) seperti pada Gambar 3.5.
Prinsip kerja dari transmitter gaya seimbang:
• Pergerakan dari batang pemuntir menghasilkan pergerakan maju-mundur
pada pengimbang utama. Bergeraknya pengimbang utama akan mengubah
kedudukan pembalik sehingga akan menjauhi dan mendekati pemancar.
• Bila pembalik menjauhi pemancar maka tekanan balik udara penggerak
diafrakma besar pada relai pilot akan berkurang dari sebelumnya.
Sebaliknya bila pembalik mendekati pemancar “tekanan balik” udara
penggerak diafakma besar pada relai pilot akan bertambah dari
sebelumnya.
• Berubahnya tekanan balik udara penggerak diafrakma besar pada relai
pilot akan mengubah kedudukan kerangan pilot pada relai untuk membuka
dan menutup.
• Bila kerangan pilot membuka maka tekanan udara instrumen out-put
menjadi bertambah, sebaliknya bila kerangan pilot menutup, tekanan udara
instrumen out-put menjadi berkurang. Dengan demikian penggerak dari
batang pemuntir akan menghasilkan perubahan pada tekanan udara
instrumen out-put.
• Udara instrumen out-put juga dikirim ke kapsul pengimbang balik.
• Tekanan udara instrumen out-put akan terus bertambah atau berkurang
sampai pengimbang utama mendapatkan gaya balas yang sama besar dari
• Sekali gaya pada pengimbang utama sama dengan gaya pada pengimbang
kedua, maka tekanan udara instrumen out-put tidak berubah lagi.
Bagian-bagian utama dari transmitter ini adalah, sebagai berikut:
1. Penyetel titik nol (Zero Adjustment)
Digunakan untuk mendapatkan titik nol dari batasan operasi transmitter.
2. Pengimbang kedua (Secondary Beam)
Digunakan sebagai batang yang meneruskan gaya gerak balas terhadap gaya
gerak pengimbang utama.
3. Kapsul pengimbang balik (Rebalancing Capsule)
Merupakan kapsul yang berisi diafrakma penggerak pengimbang utama.
4. Pemancar (Nozzle)
Digunakan sebagai ruangan udara penggerak diafrakma besar pada relai
pilot.
5. Pembalik (Buffle)
Digunakan sebagai plat penutup.
6. Pembatas Beban Balik Berlebih (Reverse Overload Stop)
Merupakan ganjal pembatas gerak pengimbang utama (pada kedudukan
maksimum).
7. Pengimbang Utama (Primary Beam)
Merupakan batang penerus gerak-gerak mekanik setengah melingkar dari
8. Pipa-pipa Kapsul Pengimbang Balik (Capsule Tubing)
Digunakan untuk menyalurkan udara penghasil gaya gerak balas terhadap
gaya pengimbang utama.
9. Pipa untuk Pemancar (Nozzle Tubing)
Merupakan pipa penyalur udara untuk pemancar.
10. Penyetel Batasan Lebar (Coarse Span- Adjustment)
Digunakan sebagai penyetel untuk memperlebar bidang gerak pengimbang
utama
11. Relai Pilot (Pilot Relay)
Digunakan sebagai kerangan pengatur tekanan udara instrumen dari
transmitter.
12. Penyetel Batasan Sempit (Find Span-Adjusment)
Digunakan sebagai penyetel unuk mempersempit bidang gerak pengimbang
utama.
13. Pegas Peninggi atau Penekan (Suppression atau Elevation Spring)
Digunakan untuk alat penyetel menaikkan skala perbandingan antara variabel
Keterangan:
1. Penyetel Tititk Nol
2. Pengimbang
10. Penyetel Batasan
Lebar
11. Penyetel Batasan
Sempit
12. Relai Pilot
13. Pegas Peninggi
atau Penekan
Perbedaan tekanan didapat dari naik turunnya tinggi permukaan cairan
dalam bejana, perubahan tekanan ini sebanding dengan perubahan tinggi
permukaan. Pada industri, tekanan dapat diatur sesuai dengan yang diinginkan
oleh proses, dimana pada aplikasinya tekanan haruslah di jaga agar produksi yang
dihasilkan bagus dan tidak terbuang.
Perubahan tekanan tersebut akan dikalibrasikan pada saat akan digunakan.
Proses pengkalibrasian akan disesuaikan dengan tinggi bejana, massa jenis cairan
dan gravitasi.
Prinsip utamanya berdasarkan pengukuran beda tekanan yang dihasilkan
oleh perbedaan tekanan dari tinggi bejana yang akan diukur, tekanan yang
dihasilkan oleh cairan juga tergantung pada massa jenis, gravitasi bumi dan tinggi
permukaan.
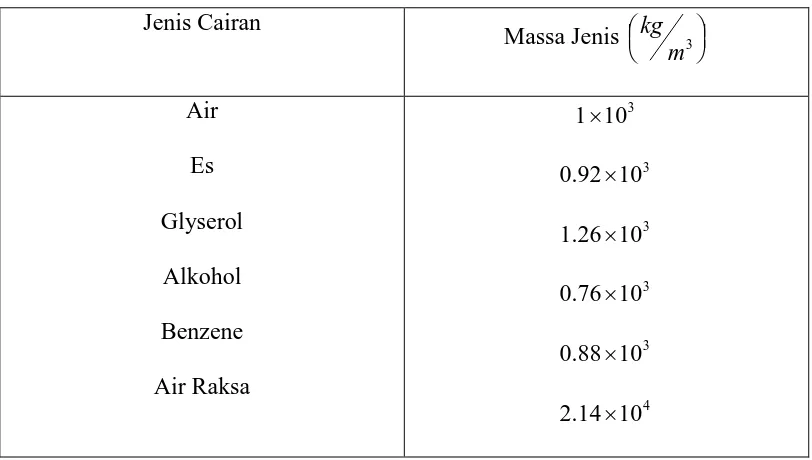
Prinsip dari pressure transmitter ini menggunakan rumus fisika, yaitu
p = ρ ×g×h, dimana: p = tekanan (Pa, atm)
h = tinggi permukaan cairan (m,cm)
Untuk penggunaan di industri atau pabrik, massa jenis dari cairan berbeda,
Tabel 3.1. Massa Jenis Cairan
Jenis Cairan
Massa Jenis 3
m kg
Air
Es
Glyserol
Alkohol
Benzene
Air Raksa
1 3
10
×
0.92×103
1.26×103
0.76 3
10
×
0.88×103
BAB IV
ANALISA DIFFERENTIAL PRESSURE TRANSMITTER PADA TANGKI
IV.1. Dasar Pengukuran Level Cairan
Pada proses industri pengukuran untuk mengetahui tinggi-rendah
permukaan (level) banyak dilakukan. Dengan mengukur level dari suatu tangki
tertentu, maka kita dapat memperkirakan berapa volume yang terkandung dalam
tangki tersebut. Dalam banyak hal, kadang-kadang indikasi dari pengukuran level
yang diperlukan hanya pernyataan “level penuh” atau “level kosong”. Maka
pengukuran level perlu dilakukan untuk mengontrol jalannya suatu proses secara
otomatis dalam dunia industri.
Pengukuran tinggi permukaan cairan pada proses, secara umum bertujuan
untuk:
• Mencegah kerusakan peralatan dan kerugian yang diakibatkan oleh cairan
yang terbuang
• Sebagai pengontrol jalannya proses
IV.2. Metoda Pengukuran Tinggi Permukaan Cairan
Metoda-metoda pengukuran level perlu dilakukan untuk mendapatkan data
analisa. Karena itu, kesalahan kecil saja dapat mengakibatkan kerugian yang besar
dalam kurun waktu yang lama. Dalam pengukuran level ada banyak cara, mulai
dari elemen perasa (sensor) hingga penunjukkannya dalam berbagai tampilan.
ragamnya. Dari ragam tersebut yang dapat digunakan biasanya tergantung pada
proses, kemampuan, dan segi harga. Secara garis besar ada dua metoda
pengukuran level yaitu:
IV.2.1. Metode Pengukuran Langsung
Tinggi level dapat dilihat langsung dan diduga kedalamanya tanpa harus
mengalami proses pengubahan bentuk bacaan dari hasil pengukuran, seperti
Gambar 4.1. Ini dikarenakan oleh mekanisme tertentu yang secara langsung dapat
diamati. Biasanya metoda pengukuran langsung ini dipakai oleh industri yang
memerlukan tempat penampungan atau tangki yang berukuran kecil, dan
ditunjukkan dalam satuan pengukuran panjang (meter). Dengan diketahuinya
tinggi level maka volume dari cairan yang diukur dapat diketahui bila diinginkan.
Gambar 4.1. Pengukuran Langsung
Dibawah ini ada beberapa contoh instrumen yang banyak dijumpai pada
proses industri yang menggunakan metoda pengukuran langsung, seperti: TINGGI CAIRAN
• Pengukuran Permukaan dengan Gelas Penunjuk
Gelas penunjuk ini berhubungan dengan cairan di dalam tangki dan
diletakkan di samping tangki yang berisi cairan. Menurut hukum bejana
berhubungan, tinggi tangki dan pada gelas penunjuk selalu sama. Untuk dapat
melihat tinggi ini, cairan yang akan diukur harus bening dan tidak boleh keruh
karena akan menganggu penglihatan pada gelas penunjuk. Apabila gelas penunjuk
ini pecah, maka cairan di dalam tangki akan tumpah keluar. Biasanya batas
ukurnya kira-kira sampai satu meter.
• Pengukuran dengan Pelampung
Pengukuran ini menggunakan pelampung yang ringan dan selalu bergerak
mengikuti permukaan cairan. Banyak sekali cara-cara pengukuran dengan
pelampung ini, tetapi pada dasarnya mempunyai prinsip yang sama, yaitu gerakan
permukaan cairan diikuti dengan gerakan pelampung yang selanjutnya
dihubungkan pada jarum berskala. Hubungan antara pelampung jarum penunjuk
bisa berupa tali, kawat dengan katrol atau batang kaku dengan suatu engsel.
Dengan menggunakan pelampung, daerah kerja pengukur permukaan dapat
diperbesar (lebih dari satu meter). Skala pembacaan dapat diletakkan pada tempat
yang tinggi atau rendah, atau terpisah jauh dari tangki cairan. Untuk memperoleh
ketelittian yang baik, pelampung harus tercelup sampai batas penampang yang
IV.2.2. Metode Pengukuran secara Tidak Langsung
Dalam metoda tidak langsung, perubahan tinggi-rendahnya level yang
terjadi dialihkan dengan penggunaan mekanisme tertentu, sehingga besaran sinyal
dapat diamati. Gaya pada cairan menghasilkan gerak mekanik. Pergerakan
mekanik ini kemudian dikalibrasikan kedalam bentuk angka-angka. Mekanisme
pengalihan perubahan tinggi-rendahnya level yang terjadi menjadi suatu besaran
sinyal, seperti pada Gambar 4.2.
Gambar 4.2. Metode Pengukuran secara Tidak Langsung
Beberapa contoh pengukuran level secara tidak langsung, antara lain:
• Pengukuran dengan Tekanan dan Beda Tekanan.
Tekanan hidrostatik pada dasar suatu bejana tergantung pada berat jenis
dan ketinggian cairan. Tekanan ini diukur dengan manometer. Pada bejana
tertutup dan bertekanan, yang diukur adalah beda tekanan antara dasar bejana dan
ruang di atas cairan, seperti Gambar 4.3.
TINGGI CAIRAN
GERAK MEKANIK
P
hydrP
gP
gP
hydrh
Gambar 4.3. Pengukuran dengan Alat Ukur Beda Tekanan
• Pengukuran dengan Sistem Jebakan Udara
Sistem ini terdiri dari satu kotak dengan lubang dibawahnya, dan yang
dipasang di ujung pipa yang dicelupkan ke dalam cairan. Lubang kotak dibiarkan
tanpa diafragma, karena udara di dalam kotak mendapat tekanan cairan maka akan
terdesak ke atas. Tekanan ini diteruskan ke pengukur tekanan, dengan mengetahui
besarnya tekanan ini dapat diketahui tinggi cairan di dalam tangki, seperti Gambar
4.4. Agar kenaikan cairan di dalam tangki kotak tidak terlalu besar, maka volume
kotak dibuat jauh lebih besar dari pada volume pipa diatasnya. Sistem jebakan
udara ini mempunyai kerugian yaitu bila dipakai untuk cairan yang dapat
melarutkan udara. Bila udara larut di dalam cairan maka cairan akan naik ke
dalam kotak dan pengukuran menjadi tidak teliti lagi. Untuk itu maka jebakan
udara ini harus sering di angkat keluar dari cairan sehingga terisi lagi dengan
udara dan kemudian di celupkan kembali. Bisa juga dibuat saluran ke suatu
sumber udara seperti pada sistem gelembung udara untuk mengisi udara kembali.
Gambar 4.4. Pengukuran dengan Metoda Jebakan Udara
Tekanan Penerima
Jebakan Udara
• Pengukuran dengan Sistem Kotak Diafragma
Terdiri dari satu kotak yang tertutup diafragma dan dipasang pada ujung
pipa yang dicelupkan ke dalam cairan. Bila cairan di dalam tangki naik maka
tekanan udara dalam kotak yang berada diatas kotak diafragma juga naik. Dengan
mengukur tekanan ini maka dapat diketahui tingginya cairan di dalam tangki,
seperti Gambar 4.5. Oleh karena diafragma mengadakan kontak langsung dengan
cairan di dalam tangki, maka ia harus terbuat dari bahan-bahan yang tahan
Gambar 4.5. Pengukuran dengan Metoda Kotak Udara
Sekat Rongga Fleksibel
Kotak Sekat Rongga yang dipasang ke Tangki
Cairan Udara dalam
Pipa Tekanan Penerima
IV.3. Penempatan transmitter
Untuk pengukuran permukaan cairan pada tangki, transmitter harus
dipasang pada titik terendah dari titik pengukuran. Pengukuran seharusnya tidak
di pasang pada material yang mengalir, di luar permukaan tangki atau di tempat
yang tidak terkena getaran.
Transmitter ini menghitung permukaan cairan melalui pengukuran tekanan
statis benda cair. Perhitungan sistem ini hanya digunakan dalam tekanan tertutup
dan tangki bertekanan, walaupun kadang kala alat ini digunakan untuk tangki
yang terbuka juga, karena prinsip transmitter tekanan berbeda juga telah diatur
dalam pengukuran yang lain.
Rancangan rangkaian instrumentasi pengukuran level cairan pada tangki
atau letak peralatan transmitter yang digunakan harus diperhitungkan. Didalam
penempatannya, transmitter yang digunakan untuk pengukuran level cairan pada
tangki harus ditempatkan sejajar dengan titik nol (0% tinggi level) tangki.
Apabila penempatan transmitter tersebut diletakan di atas titik nol (0%)
tangki, akan mengakibatkan pengukuran tidak tepat. Hal ini disebabkan adanya
gaya tekan ke atas dan akibat adanya gelembung udara pada cairan yang terdapat
pada selang penghubung atau pipa dari tangki yang di teruskan ke bagian perasa.
Adapun kegunaan daripada differential pressure transmitter model NDP
33 untuk pengukuran level cairan pada tangki, adalah:
• Pada transmitter ini penimbang pemancar dan relai kontrol digunakan
untuk mengubah perbedaan tekanan menjadi sinyal pneumatik
proporsional dalam range 0,2 s/d 1,0 kg/cm2 (3 s/d15 psi).
• Output dari transmitter dapat dihubungkan ke bagian penerima pneumatik
lain untuk merekam, mengindikasikan (memperlihatkan),
mengintegrasikan atau mengontrol variabel yang terukur.
Komponen-komponen utama dari transmitter model NDP 33, antara lain:
a. Kotak atau peti transmitter
Kotak terbuat dari logam campuaran aluminium yang tahan terhadap cuaca
atau panas dan memenuhi syarat untuk ditempatkan pada lokasi didalam atau
di luar yang yang tidak terlindung. Penutup dari gelas tahan goresan dan
polyester bertulang, dan mudah dipindahkan dengan melepaskan dua sekrup
b. Komponen Bagian Dalam
1. komponen bagian dalam alat transmitter dilapisi sebuah dasar plat
campuran logam aluminium yang diikatkan pada sebuah fitting tunggal.
Kotak transmitter diikat pada meteran, terpisah dari bagian yang lain
sehingga tegangan atau tekanan dalam pipa penghubung tidak
mempengaruhi komponen-komponen dan kecepatan hasil pengukuran.
2. komponen bagian dalam yang utama, antara lain: perangkat pemancar
utama dan kedua, kapsul pengimbang balik atau kejutan dan nozzle. Alat
transmitter di set untuk range yang ditetapkan. Range ini dapat dengan
mudah diganti dilapangan dengan merubah posisi range pita pada
perangkat pemancar. Skala pada pemancar kedua ditunjukkan pada posisi
range yang bervariasi. Penambahan kepala tambahan pada sekrup penyetel
dilakukan untuk melengkapi rentang yang baik.
IV.4. Peralatan Pengoperasian Differential Pressure Transmitter
Adapun peralatan instrumentasi yang digunakan dalam sistem pengukuran
level Cairan dengan menggunakan differential transmitter pneumatik, ialah:
a. Tangki
b. Pressure Gage
c. Gelas Penduga-meteran
d. Katup
e. Air Regulator
f. Recorder
g. Digital Manometer
h. Differential Pressure PneumatikTransmitter
IV.4.1. Tangki
Hal-hal yang perlu diperhatikan terhadap tangki sewaktu pelaksanaan uji
operasinya adalah kebocoran. Setiap sambungan yang ada pada tangki harus
benar-benar terpasang dengan rapat, karena dengan adanya kebocoran pada tangki
akan mempengaruhi hasil pengukuran level pada tangki tersebut.
Adanya kebocoran pada tangki dapat kita ketahui dengan tiga cara, yaitu:
1. Pemeriksaan level air yang keluar dari katup drain yang terpasang pada tangki.
Pemeriksaan dengan cara ini dapat dilakukan dengan mudah. Air terlebih
dahulu diisi dalam tangki sampai tinggi maksimum yang diinginkan, setelah itu
lalu kita tutup drain air masuk ke dalam tangki. Kemudian kita lakukan
apakah ditemukan tetesan air yang keluar dari katup-katup tersebut. Bila hal
tersebut ditemukan langkah awal yang harus kita lakukan yaitu memperbaiki atau
mengganti katup drain yang bocor.
2. Pemeriksaan kebocoran dengan melihat perubahan tinggi level tangki.
Pemeriksaan dengan cara ini dapat dilakukan dengan memperhatikan
perubahan tinggi level melalui alat ukur tinggi level tangki (gelas penduga) yang
terpasang pada tangki.
3. Pemeriksaan kebocoran dengan menggunakan larutan sabun
Pemeriksaan dengan cara ini dilakukan dengan mengoleskan larutan sabun
pada setiap permukaan sambungan perpipaan yang terdapat pada tangki. Apabila
pada sambungan tersebut terdapat kebocoran maka akan terbentuk gelembung
udara, semakin deras laju kebocoran maka semakin banyak gelembung udara yang
terbentuk. Jadi adanya kebocoran dapat kita ketahui dengan terbentuknya
gelembung udara pada larutan sabun.
Setelah memeriksa dan mengetahui tempat atau letak kebocoran pada
keterpasangan tangki selanjutnya level tangki kita buang sampai habis lalu
dilakukan perbaikan-perbaikan untuk mengatasi kebocoran tersebut.
IV.4.2. Pressure Gage
Pressure gage berfungsi sebagai alat pengukur dan penunjuk besarnya
tekanan yang bekerja pada suatu peralatan, sehingga dapat diamati. Dimana pada
Elemen-elemen yang paling umum dipakai untuk mengukur tekanan
differensial, yaitu:
1. Alat ukur tekanan yang elemen utamanya menggunakan cairan
2.Alat ukur tekanan dengan elemen utamanya menggunakan bahan yang
mudah memuai (Expandable Element).
Pada alat ukur tekanan yang elemen utamanya menggunakan cairan,
tekanan yang akan diukur dapat ditentukan dengan mengetahui tinggi dan berat
jenis cairan. Seperti diketahui besarnya tekanan yang diberikan oleh cairan
setinggi h adalah: P = h×ρg dimana ρ= massa jenis cairan 3
Contoh pengukuran tekanan yang elemen utamanya menggunakan cairan terdiri
dari:
• Barometer
• Manometer pipa U
• Manometer Bak (Well Manometer) • Manometer Miring
• Manometer Cincin
• Manometer Lonceng
Pada alat ukur tekanan dengan elemen utama menggunakan bahan yang
mudah memuai (Expandable Element), jenis elastisitas adalah pengukuran
dimana tekanan merubah bentuk elemen elastis (biasanya dibuat dari logam) di
dalam batas elastisnya. Karena besarnya deformasi hampir sebanding dengan
tekanan yang diterapkan, maka tekanan dapat diukur. Pengukuran tekanan jenis
elastisitas (kelenturan) atau dari bahan yang mudah memuai terdiri dari:
• Pressure Gage dengan Tabung Bourdon (Bourdon Tube)
Pengukuran tekanan bourdon paling banyak dipakai di dalam industri.
Pengukur tekanan tabung bourdon banyak dipakai sebagai indikator tekanan lokal.
Tabung bourdon merupakan suatu logam mudah mengembang yang dibuat
berlubang. Ujung yang satu dibuat tertutup dan disebut sebagai TIP ujung yang
satu lagi dibuat untuk dihubungkan dengan tekanan yang akan diukur dari ujung
disebut sebagai socket.
• Pressure Gage dengan Diafrakma
Diafragma adalah suatu bahan yang mudah melentur atau biasa disebut
membran. Membran yang dipakai untuk pressure gauge dengan diafragma
biasanya terbuat dari logam tipis, kulit, karet, polyethylene dan lain sebagainya.
Umumnya digunakan karena mempunyai gerakan keluarnya secara mekanik, yang
dapat dihubungkan secara langsung kepada tipe gerakan dari pengontrolan
pneumatik kontrol, atau bisa pula digabung dalam pneumatik atau elektronik force
• Pressure Gage dengan Pengembus (Bellow)
Pengembus (bellow) cocok untuk pengukuran tekanan sangat rendah,
karena permukaan yang menerima tekanannya luas. Pengembus adalah logam
tipis yang dibentuk menyerupai pengembus akordion. Sama seperti tabung
bourdon, pengembus juga akan bergerak memuai bila tekanan dibagian dalamnya
lebih besar dari tekanan diluarnya.
IV.4.3. Control Valve
Katup (valve) digunakan untuk mengarahkan dan mengatur aliran fluida
dari kompresor atau pompa ke berbagai peralatan beban. Kerja valve sederhana
sekali, bilamana plug terangkat, fluida proses yang mengalir dari bagian inlet ke
bagian outlet. Hanya saja, fluida proses yang mengalir ini bisa bermacam-macam,
dari yang paling bersih sampai yang paling kotor, dari yang tidak korosif sampai
yang paling korosif, dari tekanan rendah sampai tinggi dan seterusnya. Karena
kebutuhan proses yang bermacam-macam itulah, ada banyak sekali kontruksi
valve. Dengan demikian aspek yang perlu ditinjau pada waktu memilih juga
menjadi luas.
Selain itu, perhatian khusus juga diperlukan pada bagian penyekat
(packing). Karena plug harus bergerak naik-turun sedangkan tekanan di dalam
valve body cukup tinggi, diperlukan suatu konstruksi penyekat yang tidak boleh
menghambat gerak steam, namum mampu menjaga agar fluida didalam valve
Keterangan :
1. Pembungkus Mur Piringan
Roda (Packing Flange Nut)
2. Cincin Penyeka Perasa ( Felt
Wiper Ring)
3. Pembungkus Penyokong
(Packing Follower)
4. Pembungkus Pegas (Packing
spring)
5. Pembungkus Kotak Ring
(Packing Box Ring)
6. Tutup Kendali (Guide Bushing)
7. Tempat Cincin (Seat Ring)
8. Tempat Cincin (Seat Ring)
9. Tutup Kendali (Guide Bushing)
10. Pembungkus Tiang Piringan
Roda (Packing flange Stud)
11. Pembungkus Piringan Roda
(Packing Flange)
12. Tempat Mur Pengunci (Yoke
Lock Nut)
13. Pembungkus (Packing)
14. Batang Penyumbat Katup (Valve
Plug Stem)
15. Teplon Penyeka Ring (Teflon
Wiper Ring)
16. Topi Pembungkus (Bonnet)
17. Badan Katup (Valve Body)
18. Penyumbat Katup (Valve Plug)
19. Dasar Piringan Roda (Bottom
Flange)
IV.4.4. Gelas Penduga
Prinsip yang digunakan pada gelas penduga adalah prinsip bejana
behubungan. Gelas penduga dapat menunjukkan tinggi level dalam suatu bejana
atau container secara langsung. Gelas penduga terdiri dari dua jenis, yaitu:
• Gelas Penduga Ujung Terbuka
• Gelas Penduga Ujung Tertutup
Gelas penduga ujung terbuka pemasangannya sangat sederhana. Pada
gelas penduga ujung terbuka, tinggi level yang diukur pada tangki atau bejana
akan sama dengan yang ditunjukkan pada gelas penduga, karena merupakan dua
bejana yang saling berhubungan. Gelas penduga ujung terbuka biasanya
digunakan pada tangki yang tidak bertekanan yang tinggi.
Gelas penduga ujung tertutup digunakan untuk bejana bertekanan tinggi.
Kedua ujung gelas penduga dihubungkan dengan bejana. Ujung bagian bawah
tersambung dengan bagian bejana berisi cairan, sedangkan ujung bagian atas
tersambung dengan bagian bejana berisi uap (kosong).
Adapun faktor-faktor yang dapat merusak penampilan alat ukur tinggi
level pada gelas penduga adalah sebagai berikut:
1. Pembuntuan
Pembuntuan pada gelas penduga dapat diakibatkan oleh zat-zat yang
bersifat suspensif pada cairan yang diukur. Untuk menghindari
pembuntuan maka gelas penduga perlu dikuras dengan membuka kerangan
2. Tabung gelas kabur
Tabung gelas yang kabur dapat menyulitkan pembacaan atau pemeriksaan.
Hal ini diakibatkan oleh adanya kotoran yang melekat pada permukaan
tabung tersebut. Agar permukaan cairan dapat dilihat kembali dengan
jelas, maka gelas perlu di cuci.
IV.4.5. Air Regulator
Kecepatan aliran dalam sistem pneumatik bisa saja terjadi lumayan tinggi,
dan hal ini menyebabkan turunnya tekanan yang bergantung pada aliran yang
signifikan antara penerima udara dan beban. Oleh sebab itu, pada umumnya
tekanan udara dalam penerima ditetapkan lebih tinggi dari pada tekanan beban
yang dibutuhkan, dan pengaturan tekanan dilaksanakan secara lokal terhadap
beban untuk menjaga tekanan konstan tanpa bergantung pada aliran.
IV.4.6. Recoder
Recoder adalah alat untuk merekam proses variabel dalam kaitannya
dengan fungsi waktu, seperti pada Gambar 4.8. Hasil rekaman recoder ada dalam
bentuk kurva waktu dengan rentang waktu yang cukup panjang. Bisa sehari,
seminggu, bahkan lebih dari sebulan. Panjang pendeknya hasil rekaman ini
tegantung pada kertas dimana proses variabel direkam. Kertas untuk merekam
proses variabel itu disebut chart recorder.
Recoder hanya berfungsi sebagai alat perekam dan tidak membawa
pengaruh apapun pada kerja sistem pengedalian. proses variabel direkam di
sifatnya kritis. Beberapa proses variabel kritis direkam di beberapa unit recoder,
yang hasilnya kemudian disimpan sebagai arsip (file). Kalau timbul masalah,
hasil rekaman itu akan dilihat kembali, dianalisa dan bahkan dipakai sebagai
bahan bukti untuk menunjukkan dimana letak kesalahan operasi.
Hasil rekaman recoder biasanya juga disimpan sebagai bukti pengujian
tekanan (pressure test) di dalam pipa, vessel, atau salah satu unit peralatan
operasi. Hasil rekaman itu kemudian dilampirkan pada surat ijin pengoperasian
unit tersebut sebagai bukti bahwa pada unit sudah dilakuan pengujian tekanan.
Gambar 4.8. Chart Recorder
IV.5. Keterpasangan Peralatan
Sinyal input pada rangkaian ini berupa tekanan udara yang berasal dari
kompresor sebesar 1,4 kg/cm2yang di atur oleh air regulator, dimana air
regulator ini berfungsi Agar udara instrumen sumber sama dengan udara
instrumen suplai karena dapat menurunkan tekanan udara instrumen sumber.
Sedangkan sinyal outputnya berupa sinyal pneumatik sebesar 0,2-1,0 kg/cm2
tekanan udara operasi yang dikirimkan melalui pipa atau selang yang bekerja
untuk membuka dan menutup control valve yang diinginkan.
Proses sinyal ini bekerja melalui kompresor yang menghasilkan udara dan
udara bekerja masuk melalui air regulator dengan memberikan tekanan sebesar
1,4 kg/cm2.
Setelah tekanan udara diberikan ke porporsioner, kemudian nilai set point
bukaan ditentukan kontroller, yang akan dikirimkan ke control valve melalui
proporsioner supaya tekanannya tetap sebesar 0,2-1,0 kg/cm2 dan sinyal ini
menjadi sinyal instrumen pneumatik tekanan udara operasi untuk membuka
control valve sesuai dengan yang ditentukan, seperti yang terdapat Pada Gambar
P P
Gambar 4.9. Piping & instrument Diagram Pengukuran Level Air Pada Tangki Dengan Menggunakan Differential Pressure Transmitter
pompa
1,4 kg/cm2 0,2-1,0 kg/cm
IV.6. Hubungan Antara Tekanan Dengan Tinggi Level Tangki yang Diukur.
Dari hasil pelaksanaan percobaan level dalam suatu tangki dengan
menggunakan transmitter pneumatik jenis differential pressure diperoleh
harga-harga yang menyatakan aksi kerja peralatan instrumen yang terkait dalam
rangkaian keterpasangan peralatan tersebut. Seperti pada tabel berikut:
Tabel 4.1. Harga yang menyatakan hubungan antara level dengan tekanan terukur.
Pada data tabel 4.1. standart pengukuran level air pada maximum 100% =
600 mmH2O = 0,06 kg/cm 2
, dan pada pengukuran level air minimumnya 0 % =
100 mmH2O = 0,01 kg/cm 2
.
Dari grafik 4.1. dapat disimpulkan bahwa semakin tinggi level dari suatu
tangki maka semakin besar tekanan yang terdapat pada tangki tersebut, demikian
juga sebaliknya.
IV.7. Faktor–faktor yang Mempengaruhi Transmitter Saat Beroperasi
Adapun faktor–faktor yang Mempengaruhi Transmitter Saat Beroperasi
beberapa hal seperti berikut ini :
1. Getaran
Getaran dapat mengganggu transmitter, karena getaran ini akan membuat
peralatan yang terkait mengalami gangguan. Getaran ditimbulkan oleh
mesin-mesin yang beroperasi disekitar transmitter tersebut, hal ini dapat kita lihat pada
sensor, apabila sensor bergetar memungkinkan keadaan kaca penutup elektroda
pada pipa penghantar menjadi pecah maka sensor tersebut tidak bisa
dipergunakan. Untuk menghindari getaran yang terjadi hendaknya transmitter
perlu ditempatkan agak jauh dari sumber-sumber getaran.
2. Adanya gelembung udara pada rangkaian perpipaan dan rangkaian instrumen.
Jebakan udara akan mengakibatkan transportasi cairan yang dipompakan
pada rangkaian perpipaan menjadi tidak sempurna atau terjadi rugi tekanan
pemompaan yang berakibat pembacaan pada alat ukur tidak sempurna. Sedangkan
sinyal dan pengkonversian sinyal menjadi terganggu. Hal ini jelas berakibat
kesalahan pada pengukuran dan pengontrolan proses.
3. Umur piranti Instrumen
Semakin tua suatu peralatan, maka efisiensi kerja peralatan tersebut akan
semakin menurun, begitu pula dengan transmitter semakin lama dipakai maka
efisiensi kerjanya menurun. Ini diakibatkan karena peralatan sering mengalami
kontak ataupun longgarnya elemen-elemen yang terdapat pada transmitter
BAB V
KESIMPULAN DAN SARAN
KESIMPULAN
• Penempatan meterbodi (alat perasa) pada rangkaian pengukuran level
tangki harus sejajar dengan titik nol (0%) tangki, hal ini dimaksudkan agar
tekanan pada titik nol dan tekanan titik maksimum tangki yang
ditunjukkan pada digital manometer maupun recorder memperoleh hasil
pengukuran sesuai dengan harga sebenarnya.
• Perubahan tekanan berbanding lurus dengan tinggi level, semakin besar
tekanan maka level semakin tinggi.
SARAN
• Untuk mendukung kelancaran operasi pengukuran level tangki maka perlu
adanya pemeriksaan terhadap keterpasangan peralatan instrumen, seperti:
DAFTAR PUSTAKA
1. Cooper D.W, Instrumentasi Elektronika Dan Teknik Pengukuran, Edisi
ke-2, Erlangga, 1985.
2. Frans Gunterus, “Falsafah Dasar Sistem Pengendalian Proses”, PT. Elex
Media Komputindo, 1992.
3. Krist Thomas, Dasar-Dasar Pneumatik, Penerbit Erlangga, 1993.
4. Ir. E Jasjfi M,Sc, Metode Pengukuran Teknik, Edisi Keempat, Penerbit
Erlangga, Jakarta, 1985.
5. Ir. Mansyur M.si, Diktat Instrumentasi Pabrik I, 2004.
6. Ir. Mansyur M.si, Instrument Dan Proses Control, 2004.
7. Pakpahan S, Kontrol Otomatik Teori Dan Penerapan, Penerbit Erlangga,
Jakarta, 1988.
8. Saisuke Ishimaru, Hasanuddin, Instrumentasi Mini Plant, Japan
Lampiran 1