ANALISIS TEORITIS DISTRIBUSI TEGANGAN
PADA BOOM REACHSTACKER DENGAN KAPASITAS
ANGKAT MAKSIMUM 40 TON
SKRIPSI
Skripsi Yang Diajukan Untuk Memenuhi Syarat Memperoleh Gelar Sarjana Teknik
NIM.040401039
ASRUL AZIZ
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
KATA PENGANTAR
Salah satu aspek penting permesinan yang mendapat perhatian dan merupakan penentu layak atau tidaknya suatu produk dapat digunakan yaitu kekuatan bahan. Kajian ini berkaitan antara optimasi dengan kekuatan bahan.
Tugas skripsi yang mengambil topik Mekanika Kekuatan Bahan dengan judul : “Analisis Teoritis Distribusi Tegangan Pada Lengan Reachstacker Dengan Kapasitas Angkat Maksimum 40 ton” dimaksudkan sebagai salah satu
syarat untuk menyelesaikan studi di Program Reguler Departemen Teknik Mesin Universitas Sumatera Utara.
Selama menulis laporan ini, penulis banyak mendapat bimbingan dan bantuan dari berbagai pihak . Oleh karena itu dalam kesempatan ini, penulis mengucapkan terima kasih kepada :
1. Puji syukur kepada Tuhan Yang Maha Esa atas segala rahmat dan kharunia-Nya.
2. Bapak Ir. Tugiman K., MT sebagai Dosen Pembimbing yang telah memberikan arahan pada penulis selama mengerjakan tugas sarjana
3. Ayahanda Ali Yusuf dan Ibunda nurlanna Daulay, abang dan adikku yang selalu mendoakan penulis.
4. Bapak DR Ing.Ir. Ikhwansyah Isranuri selaku Ketua Departemen Teknik Mesin FT USU.
5. Bapak Tulus B. Sitorus, ST,MT. selaku Sekretaris Departemen Teknik Mesin FT USU.
6. Pimpinan dan staff di Unit Terminal Pelabuhan Peti Kemas I Belawan Medan dan seluruh pegawai tata usaha Teknik Mesin USU.
7. Seluruh Staff Pengajar di Departemen Teknik Mesin FT USU yang telah mengajarkan banyak pengetahuan baik dibidang mesin maupun pola pikir dibidang umum menjadi lebih kritis.
9. Seluruh teman teman yang memberikan masukan yang bermanfaat bagi penulis.
Penulis menyadari bahwa tugas skripsi ini masih belum sempurna oleh karena itu kritik dan saran yang membangun sangat penulis harapkan untuk perbaikan menuju yg lebih baik. Semoga Tugas Sarjana ini memberi manfaat bagi siapapun yang membacanya serta dapat menjadi referensi yang bermanfaat bagi imu pengetahuan.
Akhirnya dengan segala kerendahan hati, penulis mengucapkan syukur kepada Allah SWT atas Hidayah dan Rahmat-Nya sehingga tugas akhir ini dapat terselesaikan.
Medan, Desember 2010
Daftar Isi
Kata Pengantar i
Abstrak iii
Daftar Isi iv
Daftar Gambar vi
Daftar Tabel viii
Daftar Notasi ix
Bab I : Pendahuluan 1
1.1 Latar belakang 1
1.2 Rumusan masalah 2
1.3 Tujuan penelitian 2
1.4 Batasan masalah 2
1.5 Sistematika penulisan 3
1.6 Metode penelitian 3
1.6.1 Diagram alir 4
Bab II : Kajian Pustaka 7
2.1 Reachstacker 7
2.2 Komponen komponen reachstacker 8
2.3 Spesifikasi teknis 9
2.3.1 Spesifikasi reachstacker 9
2.3.2 Spesifikasi peti kemas 10
2.4 Cara kerja reachstacker 11
2.4.1 Gerakan mobil 12
2.4.2 Gerakan lengan/ boom 12
2.4.3 Gerakan trolley 13
2.4.4 Gerakan spreader 13
2.5 Mekanisme reachstacker 14
2.5.1 Mekanisme penggerak 14
2.5.1.1 Motor penggerak 14
2.5.2 Mekanisme pesawat angkat 14
2.5.2.1 Elektro motor 15
2.5.2.2 Sistem hidrolik 15
2.6 Distribusi daya motor 17
2.7 Distribusi daya hidrolik 18
2.8 Distribusi tegangan 19
2.8.1 Lingkaran tegangan / tegangan Mohr 21
Bab III : Analisis Dan Perhitungan 23
3.1 Analisis gaya keseimbangan pada kondisi idle 23 3.2 Analisis distribusi tegangan pada posisi panjang lengan maksimum
Tinggi maksimum dan beban maksimum 31
3.2.1 Analisa gaya yang terjadi pada lengan reachstacker 32 3.2.2 Analisa tegangan maksimum yang terjadi pada lengan
reachstacker 34
3.2.2.1 Analisa tegangan pada panjang x1 35 3.2.2.2 Analisa tegangan pada panjang x2 42 3.2.2.3 Analisa tegangan pada panjang x3 47
3.3 Diskusi hasil 55
Bab IV : Kesimpulan Dan Saran 57
Daftar Pustaka 58
DAFTAR GAMBAR
1. Gambar 1.1 Skematik rancangan penelitian 4
2. Gambar 1.2 Diagram alir proses peelitian 5
3. Gambar 2.1 Reachstacker 8
4. Gambar 2.2 Spreader 8
5. Gambar 2.3 Lengan Pengangkat 9
6. Gambar 2.4 Dimensi reachstacker 10
7. Gambar 2.5 Gerakan mobil 12
8. Gambar 2.6 Gerakan lengan/boom 12
9. Gambar 2.7 Gerakan trolley 13
10. Gambar 2.8 Gerakan spreader 13
11. Gambar 2.9 Batang pengangkat hidrolik 16
12. Gambar 2.10 Tegangan berbeban aksial 19
13. Gambar 2.11 Potongan permukaan 19
14. Gambar 2.12 Penurunan tegangan lentur 20
15. Gambar 2.13 Penurunan tegangan geser dalam balok 21 16. Gambar 2.14 Tegangan yang bekerja pada sebuah elemen 21
17. Gambar 2.15 Lingkaran Mohr 22
18. Gambar 3.1 Gaya luar reachstacker posisi idle 23 19. Gambar 3.2 Diagram gaya pada mobil reachstacker 24 20. Gambar 3.3 Diagram gaya penyangga hidrolik 25 21. Gambar 3.4 Gaya luar lengan pengangkat pada posisi idle 25
22 Gambar 3.5 Gaya pada mobil reachstacker 26
23. Gambar 3.6 Gaya luar pada lengan 27
24. Gambar 3.7 Hasil verifikasi sudut 28
25. Gambar 3.8 Gaya reaksi pada lengan 32
26. Gambar 3.9 Gaya dan tegangan pada tiap titik 35 27 Gambar 3.10 Gaya dan tegangan pada panjang x1 35 28. Gambar 3.11 Potongan ukuran dari plat lengan 36 29. Gambar 3.12 Lingkaran Mohr pada panjang x1 40
31. Gambar 3.14 Diagram geser 41
32. Gambar 3.15 Diagram momen 42
33. Gambar 3.16 Gaya dan tegangan pada panjang x2 42 34. Gambar 3.17 Lingkaran tegangan Mohr panjang x2 45
35. Gambar 3.18 Diagram geser 46
36. Gambar 3.19 Diagram momen 47
37. Gambar 3.20 Gaya dan tegangan pada panjang x3 47 38. Gambar 3.21 Lingkaran tegangan mohr panjang x3 51
39. Gambar 3.22 Diagram geser 51
40. Gambar 3.23 Diagram momen 52
41. Gambar 3.24 Diagram defleksi 53
42. Gambar 3.25 Grafik tegangan normal 54
43. Gambar 3.26 Grafik tegangan geser 54
DAFTAR TABEL
Halaman
Tabel 2.1 Ukuran peti kemas standar 11
Tabel 2.2 koefisien gesek 18
DAFTAR NOTASI
F gaya kN
P tekanan 2
m kN
D diameter saluran m
v kecepatan aliran
mnt ltr
A luas penampang m2
M momen Nm
Q momen statis m3
I inersia Nm
N gaya normal kN
V gaya geser kN
y jarak m
W berat kN
m massa kg
g grafitasi 2
s m
R panjang lengan m
σnormal tegangan normal Pa
σlentur tegangan momen Pa
BAB I PENDAHULUAN
1.1 Latar Belakang
Perkembangan transportasi jarak jauh saat ini berkembang sangat pesat. Hal ini merupakan faktor yang sangat penting sebagai sarana untuk mengangkut barang-barang yang dibutuhkan manusia yang semakin bervariasi. Untuk mengangkut barang dalam jumlah yang banyak serta jarak yang terpisah oleh laut, maka pengangkutan dengan kapal laut merupakan sarana yang paling efektif. Agar kualitas barang yang diangkut tetap baik, aman dan operasi bongkar muat lebih cepat, maka dibuatlah suatu wadah barang yang dapat diangkut dari pelabuhan ke kapal atau sebaliknya yang disebut dengan peti kemas, dimana wadah tersebut juga dapat disimpan dilapangan terbuka sehingga tidak diperlukan lagi gudang sebagai tempat penyimpanan barang dan dengan demikian dapat mengurangi biaya pengeluaran.
Kecenderungan untuk memakai peti kemas saat ini semakin tinggi seiring dengan semakin berkembangnya pertumbuhan ekonomi Indonesia yang terlihat dari semakin ramainya kegiatan ekspor dan impor dipelabuhan-pelabuhan besar. Sehubungan dengan itu maka dibutuhkan suatu pesawat pengangkat yang dapat mengangkat dan memindahkan peti kemas dari pelabuhan ke kapal atau sebaliknya dengan gerak dan mobilitas yang baik dan aman.
1.2 Rumusan Masalah
Peralatan pengangkat reachstacker merupakan salah satu peralatan yang terus menerus dipakai pada proses bongkar muat peti kemas. Oleh karena itu kemungkinan terjadi kerusakan juga sangat tinggi dan hal tersebut akan berpengaruh besar terhadap proses bongkar muat peti kemas tersebut. Maka penelitian ini bertujuan untuk dapat meminimalisir kemungkinan kerusakan terjadi. Penelitian ini difokuskan pada boom reachstacker dengan melihat gaya aksi dan tegangan yang terjadi pada posisi panjang, tinggi dan beban maksimum.
1.3 Tujuan Penelitian
Tujuan khusus dari penelitian ini adalah untuk mencari gaya – gaya dan tegangan yang terjadi pada lengan reachstacker pada posisi panjang lengan maksimum, tinggi maksimum dan beban maksimum.
1.4 Batasan Masalah
Dalam penelitian ini ditetapkan beberapa batasan penelitian, antara lain : 1. Data yang dibutuhkan berupa daya motor dan dimensi komponen
reachstacker diambil dari hasil survei dan brosur reachstacker, serta tidak merancang/ menghitung daya yang dihasilkan dari motor diesel. 2. Perhitungan dan analisis tegangan lengan reachstacker pada tiap – tiap
titik yang telah ditentukan yaitu pada panjang x1, x2, x3
1.5 Sistematika Penulisan
Pendahuluan yang berisikan latar belakang, maksud dan tujuan penelitian, metode penelitian, batasan penelitian dan sistematika penulisan dibahas di bab I
Kajian kepustakaan dibahas di bab II, yang akan menguraikan lebih lanjut tentang landasan teori, komponen utama reachstacker beserta data teknik yang didapat dari hasil survey.
Perhitungan dan analisa dibahas pada bab III, yang akan menguraikan gaya gaya dan tegangan lengan reachstacker yang terjadi pada keadaan makimum.
Kesimpulan dari perhitungan dan analisa akan dipaparkan pada bab IV.
1.6 Metode penelitian
Metode penelitian tugas akhir ini dilakukan dengan melalui tahapan sebagai berikut, yaitu :
1. Study Literatur
Study Literatur ini merupakan studi kepustakaan meliputi pengambilan teori-teori serta rumus-rumus dari berbagai sumber bacaan seperti buku, jurnal ilmiah, makalah-makalah seminar atau simposium ilmiah, skripsi mahasiswa, dan sumber-sumber dari internet yang berkaitan dengan tugas akhir ini.
2. Survey Lapangan.
Melakukan survey lapangan langsung untuk melihat spesifikasi reachstacker.
3. Diskusi
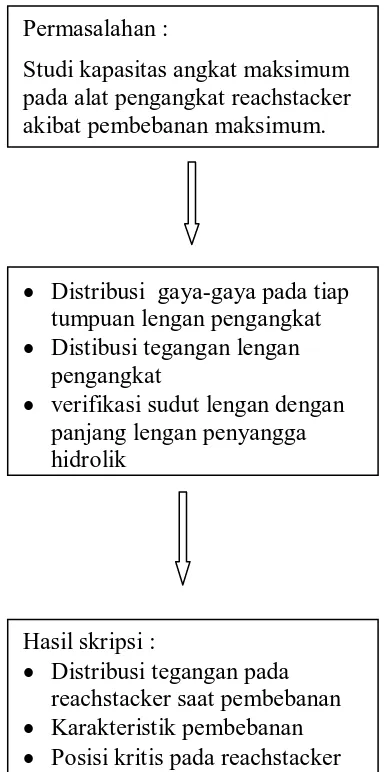
Permasalahan :
Studi kapasitas angkat maksimum pada alat pengangkat reachstacker akibat pembebanan maksimum.
Mekanisme pelaksanaan penelitian ini dapat dilihat pada gambar 1.1
Gambar 1.1 skema rancangan penelitian
Pada gambar 1.1 diuraikan bagaimana proses penelitian ini dilaksanakan. Mulai dari permasalahan, variabel-variabel yang digunakan, penyelesaian dan hasil yang ingin dicapai.
1.6.1 Diagram Alir
Dalam skripsi ini, alir proses perhitungan secara teoritis ini dilakukan secara perhitungan manual dan analisa yang dilakukan secara manual.
• Distribusi gaya-gaya pada tiap tumpuan lengan pengangkat • Distibusi tegangan lengan
pengangkat
• verifikasi sudut lengan dengan panjang lengan penyangga hidrolik
Hasil skripsi :
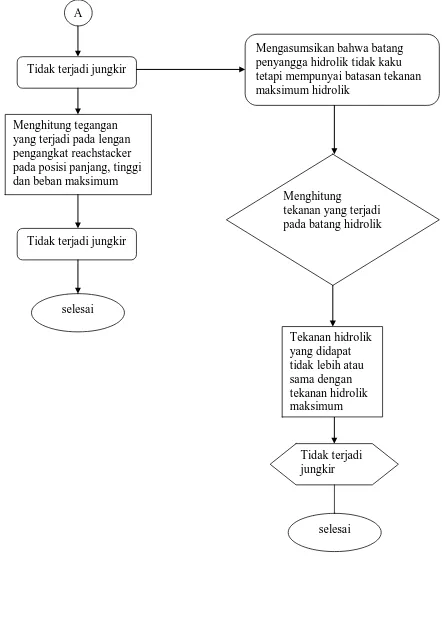
Diagram alir proses perhitungan dan analisa pada skripsi ini pada gambar 1.2 :
Mulai
membuat diagram benda bebas pada peralatan pengangkat reachstacker pada kondisi idle dan pada kondisi maksimum
membuat formulasi perhitungan gaya pada masing masing tumpuan lengan
melakukan verifikasi sudut lengan pengangkat
α dengan sudut penyangga hidrolik β
mendapat persamaan keseimbangan pada masing masing bagian pada
peralatan pengangkat reachstacker
menghitung gaya yang terjadi pada masing masing tumpuan lengan dengan sudut dan panjang lengan pengangkat tanpa pembebanan
terjadi jungkir
menghitung gaya yang terjadi pada masing masing
tumpuanlengan dengan sudut dan panjang lengan pengangkat dengan pembebanan maksimum
tidak terjadi jungkir
gambar 1.3 diagram alir proses penelitian lanjutan A
Tidak terjadi jungkir
Mengasumsikan bahwa batang penyangga hidrolik tidak kaku tetapi mempunyai batasan tekanan maksimum hidrolik
Menghitung
tekanan yang terjadi pada batang hidrolik
Tidak terjadi jungkir
selesai Menghitung tegangan
yang terjadi pada lengan pengangkat reachstacker pada posisi panjang, tinggi dan beban maksimum
Tidak terjadi jungkir
selesai
BAB II
KAJIAN PUSTAKA
Sebagaimana diketahui bahwa pada saat ini perkembangan teknologi begitu pesat yang umumnya muatan pada pelabuhan sudah dikemas dalam bentuk unitisasi sehingga penangananya dibutuhkan alat mesin pemindah bahan tepat dan sesuai untuk tiap-tiap aktivitas dalam meningkatkan efisiensi dan daya saing.
Mesin pemindah bahan dalam operasinya dapat diklasifikasi atas dua jenis yaitu :
1. Pesawat Pengangkat
Pesawat pengangkat dimaksudkan untuk keperluan mengangkat dan memindahkan barang dari suatu tempat ke tempat yang lain yang jangkauannya relatife terbatas.
Contohnya : 1. Crane
2. Reachstacker 3. Lift
2. Pesawat Pengangkut
Pesawat pengangkut dapat memindahkan muatan secara berkesinambungan dan kontinuitas dan juga dapat mengangkut muatan dalam jarak yang relatif jauh.
Contohnya : 1. Conveyor 2. Lori pengangkut 3. Elevator buah
Pada bab ini, akan dibahas mengenai landasan teori yang berkaitan dengan analisa untuk mengetahui kerja maksimum pada reach stacker.
2.1Reachstacker
posisi tergantung ruang gerak yang ada. Reachstacker terlihat pada gambar 2.1 dapat mengangkat beban hingga 40 ton. Terdapat beberapa keterbatasan dalam pengoperasian sudut lengan pengangkat. Keterbatasan ini menjadi objek kajian penelitian ini.
Gambar 2.1 reachstacker
2.2Komponen-komponen Reachstacker
Terdapat 2 komponen utama pada Reachstacker yaitu : 1. Spreader
2. Lengan/ boom 1. Spreader
Spreader berfungsi untuk menjepit peti kemas. Pada spreader inilah terdapat komponen Twist lock yang berguna untuk mengunci peti kemas sebelum diangkat spreader terlihat pada gambar 2.2
2. Lengan / boom
Lengan berfungsi sebagai pengangkat / penyangga beban agar dapat menjangkau tempat yang tinggi. Lengan reach stacker terlihat pada gambar 2.3
Gambar 2.3 Lengan Pengangkat
2.3Spesifikasi Teknis
Untuk keperluan penelitian penulis mengambil data teknik yang dibutuhkan melalui survey data dilapangan.spesifikasi teknik yang dibahas meliputi spesifikasi pada reachstacker dan spesifikasi peti kemas.
2.3.1 Spesifikasi Reachstacker
Data teknis reachstacker untuk perhitungan dapat dilihat pada gambar 2.4. yaitu :
Daya, putaran = 246 kW, 2000 rpm
Tipe boom = 2 seksi teleskopik
Mmaks = Berat kendaraan = 68400 kg
W = Beban maksimal = 392000 N
u = jarak maksimum spreader dari tanah = 15 m
l = wheel base = 5,9 m
m = Panjang lengan/ boom(pendek/ panjang) = 9,3/16,06 m n/q = Tinggi keseluruhan,min/max = 4,7/18,1 m o = Lebar keseluruhan,20feet/40feet = 6,04/12,17 m p = Panjang Keseluruhan dengan lengan = 11,5 m
r = jarak roda terluar = 4,2 m
s = panjang mobil = 8 m
Gambar 2.4 dimensi reachstacker
2.3.2 Spesifikasi Peti Kemas
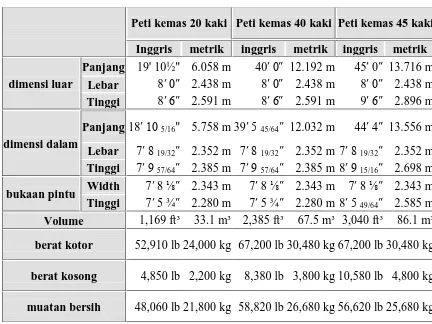
Karena pembahasannya dalam keadaan posisi maksimum. Ukuran peti kemas standar yang digunakan ditampilkan dalam tabel 2.1.
Tabel 2.1 Ukuran peti kemas standar
Peti kemas 20 kaki Peti kemas 40 kaki Peti kemas 45 kaki
Inggris metrik inggris metrik inggris metrik
dimensi luar
Panjang 19' 10½" 6.058 m 40′ 0″ 12.192 m 45′ 0″ 13.716 m Lebar 8′ 0″ 2.438 m 8′ 0″ 2.438 m 8′ 0″ 2.438 m Tinggi 8′ 6″ 2.591 m 8′ 6″ 2.591 m 9′ 6″ 2.896 m
dimensi dalam
Panjang 18′ 10 5/16" 5.758 m 39′ 5 45/64″ 12.032 m 44′ 4″ 13.556 m
Lebar 7′ 8 19/32″ 2.352 m 7′ 8 19/32″ 2.352 m 7′ 8 19/32″ 2.352 m Tinggi 7′ 9 57/64″ 2.385 m 7′ 9 57/64″ 2.385 m 8′ 9 15/16″ 2.698 m
bukaan pintu Width 7′ 8 ⅛″ 2.343 m 7′ 8 ⅛″ 2.343 m 7′ 8 ⅛″ 2.343 m Tinggi 7′ 5 ¾″ 2.280 m 7′ 5 ¾″ 2.280 m 8′ 5 49/64″ 2.585 m Volume 1,169 ft³ 33.1 m³ 2,385 ft³ 67.5 m³ 3,040 ft³ 86.1 m³
berat kotor 52,910 lb 24,000 kg 67,200 lb 30,480 kg 67,200 lb 30,480 kg
berat kosong 4,850 lb 2,200 kg 8,380 lb 3,800 kg 10,580 lb 4,800 kg
muatan bersih 48,060 lb 21,800 kg 58,820 lb 26,680 kg 56,620 lb 25,680 kg
Source :
2.4Cara Kerja Reachstacker
Reachstacker bekerja dengan mekanisme angkat dengan cara memanjang/ meninggikan lengan pengangkat lalu memindahkan petikemas dengan mekanisme mobil ke tempat lain.
Adapun cara kerja dari Reachstacker ini dapat dibagi atas tiga gerakan yaitu :
2.4.1 Gerakan Mobil
Gerakan mobil ini adalah gerakan reachstacker untuk pindah dari suatu tempat ketempat lain. Reachstacker bergerak seperti gerakan mobil pada umumnya. Reachstacker memiliki 6 buah ban karet yang terdiri dari 2 buah ban pada bagian belakang dan 4 buah ban dibagian depan. Roda pada reachstacker digerakkan oleh putaran yang berasal dari mesin. dimana Kecapatan maksimum dari gerakan mobil ini mencapai 25 km/hr. Gerakan mobil dapat dilihat pada gambar 2.5 berikut.
Gambar 2.5 gerakan mobil 2.4.2 Gerakan lengan/boom
Gerakan lengan/boom ini adalah gerakan angkat dan turun lengan serta gerakan memanjang dan memendek lengan secara bersamaan sehingga lengan dapat mengangkat dan menurunkan peti kemas sampai pada ketinggian tertentu. Gerakan lengan ini memiliki sudut tertentu terhadap bidang datar yang diperbolehkan sehingga reachstacker tidak terbalik sewaktu mengangkat beban. Gerakan lengan/boom pada saat memanjang dan memendek terlihat pada gambar 2.6 berikut
2.4.3 Gerakan trolley
Gerakan trolley ini adalah gerakan untuk memutar spreader dan menyeimbangkan petikemas agar selalu dalam keadaan tegak, yang berarti memutar peti kemas sehingga peti kemas dapat dengan tepat disusun secara bertingkat. Gerakan trolley yang memutar spreader kekiri dan kekanan terlihat pada gambar 2.7
Gambar 2.7 gerakan trolley
2.4.4 Gerakan spreader
Gerakan spreader ini adalah gerakan untuk memanjang dan memendekkan spreader sehingga dapat disesuaikan untuk mengangkat peti kemas. Spreader dapat memanjang dengan menggunakan daya hidrolik. Spreader dapat memanjang dengan panjang 40 feet dan 20 feet desesuaikan dengan standar internasional ukuran peti kemas. Gerakan spreader dapat dilihat pada gambar 2.8
2.5 Mekanisme Reachstacker
Reachstacker mempunyai beberapa mekanisme dalam melakukan kerja sebagai satu kesatuan dari mesin pengangkat. Beberapa mekanisme bersinergi menjadikan reachstacker dapat bergerak mengangkat sekaligus berjalan. Berikut merupakan mekanisme yang terdapat pada reachstacker yaitu :
1. Mekanisme penggerak 2. Mekanisme Pengangkat 2.5.1 Mekanisme penggerak
Mekanisme penggerak merupakan salah satu mekanisme yang digunakan untuk keperluan pemindahan peti kemas dari suatu tempat ketempat lain. Mekanisme ini menggunakan roda karet untuk bergerak berpindah. Untuk menggerakkan roda diperlukan daya. Daya didapatkan dari hasil pembakaran yang terjadi pada motor diesel dan disalurkan melalui sistem transmisi.
2.5.1.1 Motor Penggerak
Pada reachstacker terdapat sebuah mesin utama yang digunakan untuk menggerakkan seluruh kerja reachstacker. Penggerak mobil saat berjalan dan mengangkat beban maksimum yaitu sebesar 246 kW. Adapun pada saat berhenti dan mengangkat beban, daya mesin digunakan untuk memutar pompa hidrolik. Tekanan hidrolik maksimum yang dihasilkan yaitu sebesar 20.7 Mpa
2.5.1.2 Sistem Transmisi
Pada reachstacker, kopling untuk mentransmisikan daya mesin menggunakan kopling jenis torsi converter. Kopling jenis ini akan bekerja bila terjadi perubahan torsi yang dialami oleh mesin reachstacker. Perubahan torsi yang terjadi diakibatkan oleh beban yang sedang terjadi pada reachstacker. Sedangkan untuk gearbox digunakan gearbox tipe powershift yang mempunyai 4 perpindahan gigi kedepan dan 4 perpindahan gigi kebelakang.
2.5.2 Mekanisme Pesawat Angkat
tempat di pelabuhan. Peti kemas diangkat dengan menggunakan lengan penyangga hidrolik. Lengan penyangga ini akan memanjang atau memendek saat proses pengangkatan. lengan juga akan memanjang/ memendek pada saat mekanisme angkat. Mekanisme ini sangat mengutamakan sistem hidrolik untuk kemampuan mengangkat peti kemas. Adapun elektro motor digunakan hanya untuk menggerakkan spreader agar peti kemas selalu dalam keadaan seimbang.
2.5.2.1 Elektro Motor
Pada reachstacker terdapat elektro motor yang digunakan untuk memutar spreader yang memakai sistem roda gigi sehingga peti kemas dapat diputar tanpa harus memutar mobil. Tegangan listrik yang digunakan pada elektro motor berjenis tegangan listrik AC, dengan daya 1920 watt.
2.5.2.2 Sistem hidrolik
Sistem hidrolik bekerja karena adanya daya dari mesin yang diteruskan secara mekanis, elektris atau hidrolis. Sistem hidrolik adalah sistem daya yag menggunakan fluda kerja cair. Besaran utama dalam sistem ini adalah tekanan dan aliran fluida. Tekanan menghasilkan daya dorong, sedangkan aliran menghasilkan gerakan atau kecepatan aliran. Pada reachstacker ini terdapat banyak komponen hidrolik.tekanan maksimum yang dihasilkan oleh sistem hidrolik sebesar 20,7 MPa. Tekanan hidrolik yang dihasilkan dari pompa hidrolik disesuaikan dengan besaran kebutuhan masing masing komponen hidrolik. Pompa hidrolik berfungsi untuk mentransfer energi mekanik menjadi energi hidrolik. Pompa hidrolik bekerja dengan cara menghisap oli dari tangki hidrolik dan mendorongnya kedalam sistem hidrolik dalam bentuk aliran (flow). Aliran ini yang dimanfaatkan dengan cara merubahnya menjadi tekanan. Tekanan dihasilkan dengan cara menghambat aliran oli dalam sistem hidrolik. Hambatan ini dapat disebabkan
oleh orifice, silinder, motor hidrolik, dan aktuator. Pompa hidrolik yang biasa digunakan ada dua macam yaitu Positive dan Non - positive Displacement Pump. Rumus dasar dari hidrolik ( sullivan,flui power theory ) adalah :
Tekanan :
2 4
D F A F P
π =
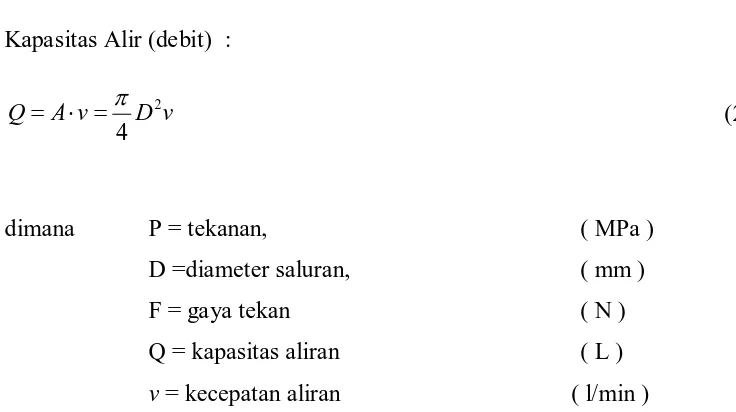
Kapasitas Alir (debit) :
v D v A
Q 2
4 π = ⋅
= (2.2)
dimana P = tekanan, ( MPa )
D =diameter saluran, ( mm )
F = gaya tekan ( N )
Q = kapasitas aliran ( L )
v = kecepatan aliran ( l/min )
Komponen-komponen sistem hidrolik terdiri dari batang-batang pengangkat beserta silinder hidroliknya (actuator) lihat gambar 2.9, pompa, katup-katup, pipa/hose, fluida , filter, tanki dan lain-lain.
Gambar 2.9 batang pengangkat hidrolik
Pada lengan pengangkat hidrolik reachstacker terdapat spesifikasi sebagai berikut:
1. Tekanan hidrolik maksimum 20,7 Mpa
2. Tingkat kebisingan menurut standar DIN 45635 part 36 di kabin 70 dB(A)
3. volume minyak hidrolik 600 l
4. Kecepatan aliran minyak hidrolik 583 l/min 5. Diameter saluran minyak hidrolik 12 cm
6. Perlindungan berat berlebih mekanis
2.6 Distribusi Daya Motor
Pada reachstacker, daya yang berasal dari putaran mesin disalurkan ke roda penggerak dan juga pada komponen hidrolik. Motor penggerak yang digunakan menggerakkan keseluruhan mekanisme reachstacker menggunakan bahan bakar solar. Pemakaian bahan bakar jenis ini erat kaitannya dengan beban yang akan diangkat oleh reachstacker. Masing masing komponen merupakan hasil dari distribusi daya yang dihasilkan oleh motor diesel. Besar distribusi daya tergantung dari kebutuhan masing masing komponen.
Gerakan angkat merupakan sistem yang memerlukan banyak daya dari putaran motor diesel. Melalui perhitungan dengan menggunakan persamaan 2.1 maka didapat daya yang dibutuhkan untuk gerakan angkat reachstacker yaitu :
N = η ⋅ ⋅ 75
V Q
(2.3)
dimana :
N = Daya statis saat keadaan mengangkat = (hp)
Q = berat angkat total = massa peti kemas +
spreader dan komponen pengait
(30480 + 3000) kg V = Kecepatan angkat dengan beban = 0,25 m/det
η = efisiensi mekanis pengangkat = 0,814
didapat daya yang dibutuhkan mengangkat beban yaitu 137,1 hp (lihat hal. 9,referensi 1 kW= 1,34 hp). Daya puncak/ maksimum yang dihasilkan oleh motor diesel yaitu 330 hp, maka daya yang digunakan untuk gerakan angkat yaitu sebesar 45% dari total daya puncak yang dapat dihasilkan oleh motor diesel.
Dan untuk daya angkat reachstacker pada saat berhenti didapat :
N =
µ η⋅ ⋅⋅ 75
V Q
Tabel 2.2 koefisien gesek
Dimana :
N = Daya statis saat keadaan mengangkat = (hp)
Q = berat angkat total = massa peti kemas +
spreader dan komponen pengait
(30480 + 3000) kg V = Kecepatan angkat dengan beban = 0,25 m/det
η = efisiensi mekanis pengangkat = 0,814
μ = koefisien gesek = 0,3
didapat daya yang dibutuhkan mengangkat beban yaitu 457 hp. daya puncak/ maksimum yang dihasilkan oleh motor diesel yaitu 330 hp, maka daya yang digunakan untuk gerakan angkat yaitu sebesar 45% lebih dari total daya puncak yang dapat dihasilkan oleh motor diesel.
2.7 Distribusi Daya Hidrolik
Komponen hidrolik pada reachstacker terdiri dari :
1. lengan hidrolik penyangga boom yang terdiri dari dua batang penyangga. 2. teleskopik hidrolik pada boom yang digunakan untuk memanjang/
memendekkan boom.
3. hidrolik pada trolley yang berjumlah dua batang, berguna untuk menyeimbangkan petikemas.
4. hidrolik pada spreader, yang digunakan untuk memanjang/ memendekkan spreader untuk disesuaikan dengan petikemas yang ada.
Lengan pengangkat digerakkan oleh fluida bertekanan. Fluida bertekanan yang dipakai berasal dari pompa hidrolik yang digerakkan oleh motor diesel.
Putaran motor diesel dihubungkan melalui sebuah coupling dan sebuah reduction gearbox memutar poros engkol. Putaran ini dengan bantuan connecting road dirubah menjadi gerak lurus untuk memompakan fluida dengan tiga buah piston secara bergantian.
2.8 Distribusi tegangan
Dengan mengasumsikan tegangan terbagi rata diseluruh permukaan, sedangkan gaya terdistribusi kontiniu bekerja pada seluruh penampang. Intensitas gaya (yaitu gaya per satuan luas) disebut dengan tegangan dan diberi notasi σ. Dengan melihat gambar dibawah ini, maka persamaan untuk tegangannya :
Gambar 2.10 tegangan berbeban aksial
Rumus tegangan yang digunakan dari ( Meriam, mekanika teknik edisi II ) yaitu : Untuk rumus tegangan normal yang disebabkan oleh gaya aksial :
(2.5)
Dimana : A = luas lengan reachstacker (m2)
Dari statika kita ketahui bahwa resultan dari tegangan yang bekerja di penampang adalah gaya geser V dan momen lentur M. Dengan menjumlahkan gaya-gaya dalam arah vertical dan mengambil momen terhadap potongan, kita dapatkan :
∑ Fx = 0 (2.6)
∑ Mx = 0
Untuk komponen gaya pada sumbu y digunakan rumus :
∑ Fy = 0;
∑ My = 0 (2.7)
Tegangan yang disebabkan oleh lenturan pada bangunan lurus seperti terlihat pada gambar 2.12 di bawah ini :
Gambar 2.12 penurunan tegangan lentur
rumus :
(2.8)
Dimana : I = momen inersia (m4)
M = momen lentur (kN.m)
y = jarak sumbu netral dengan titik berat daerah parsial (m)
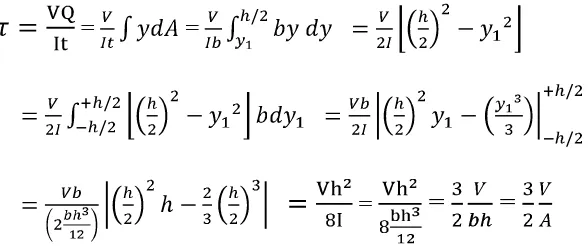
Sedangkan tegangan geser yang disebabkan oleh gaya geser dalam balok digunakan rumus :
(2.9)
Dimana : V = tegangan geser total (kN)
Q = momen statis (m3)
untuk distribusi tegangan geser dalam balok didapat dari persmaan (2.9) dimana t = b dan sedangkan y = h/2 maka :
Gambar 2.13 penurunan tegangan geser dalam balok
= =
=
=
=
Maka rumus yang digunakan untuk distribusi tegangan geser adalah :
(2.10)
2.8.1 Lingkaran Tegangan / Tegangan Mohr.
lingkaran tegangan mohr sangat luas dipergunakan dalam praktek transformasi tegangan. Ordinat dari sebuah titik pada lingkaran merupakan
tegangan geser τxy sedang absisnya adalah tegangan normal σx. Dan didapat σ1
merupakan tegangan maksimum sedangkan σ2 merupakan tegangan minimum.
Gambar 2.14 tegangan yang bekerja pada sebuah elemen Persamaan tegangan Von Mises maksimum minimum adalah :
σx'dA = σxdA cosθ cosθ + σydA sinθ sinθ + τxydA cosθ sinθ + τxydA sinθ cosθ
(2.11)
Tegangan maksimum :
Dengan mendeffrensialkan persamaan 2.11 terhadap sudut θ hasilnya :
(2.12)
Dengan mensubsitusikan persamaan 2.12 ke persamaan 2.11 maka didapat tegangan Von Mises / tegangan maksimum & minimum :
σ1 = tegangan maksimum σ2 = tegangan minimum
Gambar 2.15 lingkaran tegangan mohr
Dimana :
(2.13)
(2.14)
BAB III
ANALISIS DAN PERHITUNGAN
Pada bab ini akan dibahas perhitungan dan analisis gaya luar dan kesetimbangan mekanisme pengangkat yang terjadi pada reachstacker. Terdapat banyak kondisi yang dialami oleh mesin pengangkat reachstacker, oleh karena itu diambil kondisi yang mewakili seluruh kerja dari reachstacker tersebut. Kondisi kerja yang terjadi pada reachstacker dibagi atas 6 kondisi. Keenam kondisi ini diasumsikan karena jumlah tingkat dari peti kemas yang bisa diangkat oleh reachstacker adalah 5 tingkat peti kemas ditambah satu kondisi idle.
3.1 Analisis Gaya Kesetimbangan Pada Kondisi Idle
Kondisi idle reachstacker merupakan kondisi dimana lengan pengangkat tidak mengangkat beban dan posisi lengan sejajar dengan permukaan tanah. Analisis pada kondisi idle sangat diperlukan agar dapat dijadikan landasan perhitungan pada kondisi kondisi selanjutnya. Gambar 3.1 menunjukkan gaya gaya luar yang terjadi pada reachstacker dalam kondisi idle.
Keterangan :
Frear gaya gesek pada permukaan tanah dengan ban belakang Nr gaya normal roda belakang
Nf gaya normal roda depan W1 berat mobil reachstacker W2 berat counter balance W3 berat lengan pengangkat W4 berat spreader + trolley
Dari gambar 3.1 analisa gaya yang terjadi pada reachstacker dapat pecah menjadi beberapa bagian. Bagian tersebut dapat dipisahkan menjadi tiga bagian besar yaitu
1 Bagian mobil reachstacker
Bagian mobil reachstacker merupakan bagian yang menopang seluruh komponen yang ada. Pada mobil reachstacker terdapat gaya gaya yang secara langsung mempengaruhi kestabilan dari seluruh komponen pada reachstacker. Gaya gaya yang terjadi meliputi gaya normal yang ada pada bagian roda. Bila gaya normal yang terjadi pada masing masing roda bernilai negatif itu berarti terjadi jungkir atau tidak seimbang pada reachstacker. Pada gambar 3.2 ditunjukkan gaya yang terjadi pada mobil reachstacker.
2 Bagian penyangga hidrolik
Bagian penyangga hidrolik merupakan batang dua gaya. Gaya yang terjadi sama besar dan berlawanan arah. Sudut yang terjadi pada lengan
penyangga hidrolik dengan permukaan tanah disebut sudut β. Gambar 3.3
menunjukkan diagram gaya yang terjadi pada lengan penyangga hidrolik
Gambar 3.3 diagram gaya lengan penyangga hidrolik
3 Bagian lengan/ boom
Bagian lengan pengangkat memiliki dua posisi tumpuan yaitu titik a dan titik c. adapun gaya lain yang terjadi berupa gaya yang berasal dari berat lengan penyangga itu sendiri maupun yang berasal dari berat peti kemas dan komponen pengangkat spreader dan trolley. Gambar 3.4 menunjukkan gaya yang terjadi pada lengan/ boom pengangkat
Analisa gaya pada lengan pengangkat
Dengan menggunakan persamaan 2.4 maka dapat dihitung kesetimbangan pada reachstacker. analisa dibagi menjadi dua bagian besar yaitu pada bagian lengan lalu analisa kesetimbangan pada bagian mobil reachstacker.
Analisa gaya pada mobil reachstacker
Adapun gaya gaya pada lengan pengangkat berpengaruh terhadap mobil reachstacker secara keseluruhan. Oleh karena itu penggunaan gaya yang ada pada lengan pengangkat tidak lagi secara keseluruhan dibahas, tetapi diambil gaya gaya yang berhubungan langsung seperti pada join dan tumpuan dengan mobil reachstacker.
Dengan metode persamaan kesetimbangan, keseimbangan mobil reachstacker tanpa lengan dapat diketahui pada gambar 3.5.
Gambar 3.5 gaya pada mobil reachstacker
Dimana :
f = jarak y titik berat mobil dari permukaan tanah = 0,9m g = jarak y titik tumpu lengan hidrolik dari permukaan tanah = 0,8m h = jarak x titik tumpu dari roda depan = 0,85m i = jarak x titik berat mobil dari roda depan = 3,1m w1 = berat dari counter balance (pemberat) = 8000 kg = 78480 N w2 = berat mobil reachstacker = 40400 kg = 396324 N Fcb = -Fbc tanda minus yaitu arah yang berlawanan. = 535,3 kN
Fbx = Fbc cos 56 = 299,34 kN
Fby = Fbc sin 56 = 443,79 kN
[sumber : survey dilapangan]
Analisa gaya pada lengan pengangkat. Dari data survey didapat :
° =60 maks
α
N
G=98100 (berat trolley dan komponen pengait spreader)
W = m . g (3.1)
W = 40000 kg x 9,8 = 392000 kN dimana :
α, yaitu sudut lengan pengangkat maksimum terhadap garis horizontal G, yaitu berat trolley dan spreader (komponen pengait peti kemas) W, yaitu berat peti kemas dengan kapasitas maksimum 40 ton
Dengan menggambarkan gaya gaya yang bekerja pada lengan pengangkat, maka didapat diagram benda bebas pada gambar 3.6.
Dimana :
W4, adalah berat beban petikemas dengan paralatan trolley dan spreader Berat maksimum petikemas 40000 kg = 392000 N
Berat trolley + spreader 10000 kg = 98100 N
karena pada saat kondisi idle reachstacker tidak dalam keadaan mengangkat beban maka W4 = 98100 N
W3, adalah berat lengan pengangkat sebesar 10000 kg = 98100 N Fcb, adalah gaya tekan hidrolik untuk mengangkat beban
R1, adalah panjang lengan pengangkat yaitu 9,5-15,5 m
R2, adalah koordinat x titik berat lengan pengangkat yaitu R1/2 m R3, adalah jarak lengan penyangga hidrolik ke tumpuan yaitu 3,15 m
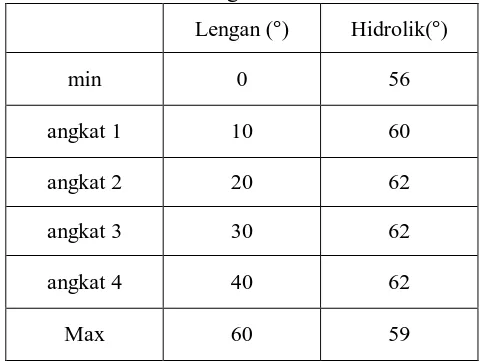
Panjang lengan penyangga hidrolik maksimum yaitu 6,5 meter dan minimum yaitu 3,5 m. Untuk sudut antara penyangga hidrolik dengan sumbu x dapat ditentukan melalui verifikasi berdasarkan panjang lengan penyangga hidrolik. Hasil verifikasi sudut pada lengan Fcb terlihat pada gambar 3.7.
Tabel 3.1 verifikasi sudut antara lengan dan hidrolik
Lengan (°) Hidrolik(°)
min 0 56
angkat 1 10 60
angkat 2 20 62
angkat 3 30 62
angkat 4 40 62
Max 60 59
Dari gambar 3.6 terlihat sudut cb dengan garis horizontal membentuk sudut. Sudut yang terjadi tidak banyak mengalami perubahan. Panjang lengan hidrolik yaitu 3,5 m dan panjang maksimum lengan penyangga hidrolik yaitu 6,5 m.
Maka persamaan kesetimbangan pada boom pengangkat dapat dilihat pada gambar 3.5, maka diperoleh :
0 = ∑Fx
Fax – Fcb cos 56 = 0 (1)
0 = ∑Fy
-Fay + Fcb sin 56 –W3 – W4 = 0
-Fay + Fcb sin 56 = 196200 N (2)
0 = ∑Ma
-W4 • r1 – W3 • r2 + Fcb sin56 • R3 + Fcb cos56 • R4 = 0 (3)
Dimana : R1 yaitu panjang lengan sebesar 9,5 m
maka didapat : Fcb = 535,3 kN
Dengan mensubstitusikan persamaan 3 ke 1 didapat nilai Fax = 299,34 kN
Dengan mensubstitusikan persamaan 3 ke 2 didapat nilai Fay = 247,59 kN
6,35 P = 299,34 (0,996) + 247,59 (3,15)
P
=
P
=
P = 169,77 kN
Tegangan yang terjadi :
Dimana :
Luas penampang luar Al :
Al = b.h dimana : b = 996 mm h = 805 mm maka :
Al = ( 996 )( 805 ) Al = 801780 mm2
Luas penampang dalam Ad :
Ad = (b-2t).(h-2t) dimana : t = 16 mm Maka :
Ad = (996-2.16)(805-2.16) Ad = (996-32)(805-32) Ad = 964 . 773
Jadi luas penampang A adalah : A = Al – Ad
A= 801780 – 745172 A = 56608 mm2 Maka :
τ
= 0,0029 kN/mm
2τ = 2,9 Mpa
tegangan geser :
τ = 0,0025 kN/mm
2τ = 2,5 Mpa
3.2Analisa distribusi tegangan pada posisi panjang lengan maksimum,
tinggi maksimum dan beban maksimum.
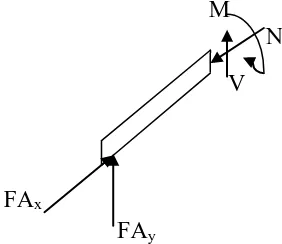
Gambar 3.8 gaya reaksi pada lengan Dimana :
− Fx = gaya pada tumpuan Ax − Fy = gaya pada tumpuan Ay − Fx = gaya pada tumpuan Bx = Fcx − Fy = gaya pada tumpuan By = Fcy − G = titik berat dari lengan
− W = peti kemas + spreader
3.2.1 Analisa gaya yang terjadi pada lengan reachstacker.
Berdasarkan pembebanan yang dialami kontruksi boom, maka dapat dianalisa gaya-gaya yang terjadi sebagai berikut :
Gaya reaksi lengan pertama yang terjadi pada tumpuan A :
- - W3 – W4 = 0
= - W3 – W4
Gaya reaksi yang terjadi pada tumpuan C :
- tan β = 0
= tan β = 0
-W4 • r1 – W3 • r2 + Fcb sinβ • R3 + Fcb cosβ • R4 = 0 Fcb (R3 sinβ + R4 cosβ ) = W4 • r1 + W3 • r2
Fcb =
Berikut penjabaran dari gaya gaya yang terjadi : FAx = Fcb cos β
FCx = Fcb cos β
FAy = Fcb sin β – (w3 +w4) FCy = Fcb sin β
Fcb = β β cos sin . . 4 3 2 3 1 4 r r r w r w + +
Dimana : R1 yaitu panjang lengan sebesar 15,5 m cos α
R2 yaitu jarak titik tumpu ke titik berat lengan sebesar 7,75 m cos α R3 yaitu jarak titik tumpu ke titik penyangga hidrolik 3,15 m cos α R4 yaitu jarak proyeksi y titik tumpu ke titik penyangga 3,15 m sin α W4 yaitu berat maksimum 490,1 kN
Dari persamaan diatas maka didapat :
Fcb
=β
β
cos
sin
.
.
4 3
2 3 1 4
r
r
r
w
r
w
+
+
Fcb
=
Fcb = 1516,64 kN
Dari persamaan gaya-gaya didapat : FAx = Fcb cos β
FAx = 1516,64 kN cos 59 FAx = 781,13 kN
FCx = Fcb cos β FCx = 781,13 kN dan
FAy = Fcb sin β – (w3 + w4 )
FAy = 1516,64 sin 59 – ( 98,1 + 490,1 ) FAy = 711,811 kN
FCy= Fcb sin β FCy = 1300,01 kN
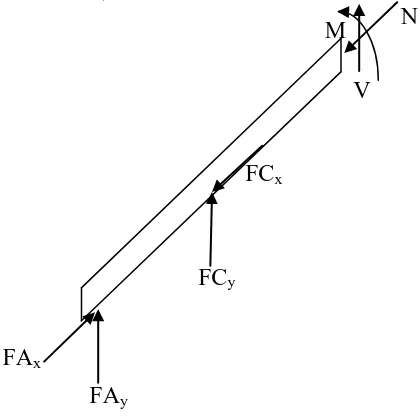
3.2.2 Analisa tegangan maksimum yang terjadi pada lengan reachstacker
∙
∙
CA
∙
Dc
X2 X1
FAx
FAy
V N X3
c
b
b a
[image:44.595.140.396.87.366.2]a
Gambar 3.9 gaya dan tegangan pada tiap panjang Dimana :
- panjang x1 pada potongan a-a adalah 0 < x1 < 3,15 - panjang x2 pada potongan b-b adalah 3,15 < x1 < 9,5 - panjang x3 pada potongan c-c adalah 9,5 < x3 < 15,5
3.2.2.1 Analisa distribusi tegangan pada panjang x1 :
Dari gambar 3.9 didapat gaya dan tegangan yang terjadi pada panjang x1 dimana 0 < x1 < 3,15
M
[image:44.595.202.343.563.685.2]t
1,575 cos α P = (781,13.0,3 cos α + 711,811. 0,85 sin α)
1,575 cos 60o P = (781,13.0,3 cos 60o + 711,811.0,85 sin 60o) (1,575.0,5) P = (781,13.0,3 . 0,5 + 711,811.0,85 . 0,866) 0,7875 P = ( 117,1695 + 523,964 )
0,7875 P = 641,1336
P
=
P = 814,14 kN
Tegangan yang terjadi pada lengan reachstacker pada panjang x1 adalah : Deangan mendapatkan nilai P maka dapat kita cari nilai tagangannya : a). Tegangan normal :
Dimana:
N – P cos 30o = 0 N – 814,14 . (0,866) = 0 N = 705,05 kN
Dan: A adalah luas penampang :
h
b
Gambar 3.11 potongan ukuran dari plat lengan
Luas penampang luar Al :
maka :
Al = ( 996 )( 805 ) Al = 801780 mm2
Luas penampang dalam Ad :
Ad = (b-2t).(h-2t) dimana : t = 16 mm Maka :
Ad = (996-2.16)(805-2.16) Ad = (996-32)(805-32) Ad = 964 . 773
Ad = 745172 mm2
Jadi luas penampang A adalah : A = Al – Ad
A= 801780 – 745172 A = 56608 mm2
Maka tegangannya adalah :
kN / mm2 MPa
b). Tegangan geser :
Dimana :
Maka tegangannya adalah :
τ
= 0,011 kN/mm2τ =
10,57 Mpac). Tegangan momen lentur :
Dimana :
M = Fax (x1. sin α ) + Fay ( x1. cos α )
M = 781,13 ( 1,575 sin 60o ) + 711,81 ( 1,575 cos 60o ) M = 781,13 (1,3639) + 711,81 (0,7875)
M = 1065,451 + 560,55 M = 1626,001 kN m
Dan momen inersia adalah
-
–
-
I = 6159300376 mm4
Dan ;
mm
Maka tegangan momen lentur adalah :
σ
=
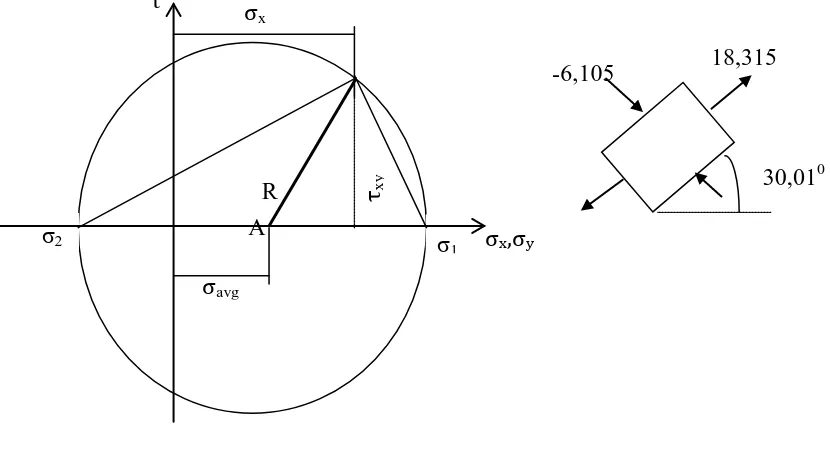
0,028 Mpad). tegangan center :
(a) Dimana :
σx = tegangan normal = 12,21 MPa τxy = tegangan geser = 10,57 Mpa σy = 0
radius :
R = 12,21 Mpa
MPa 105 , 6 2
0 21 , 12
= + =
avg
σ
τxy
A σ1 σ2 30,010 18,315 -6,105
R τxy
σavg
σx,σy
σx
Lingkaran tegangan Mohr untuk panjang x1
τ
[image:49.595.91.521.91.748.2]
Gambar 3.12 lingkaran tegangan Mohr panjang x1 Dimana :
σ1 = 6,105 + 12,21 MPa
σ1= σmax = 18,315 MPa
σ2 = 6,105 – 12,21 MPa
σ2= σmin = - 6,105 MPa
tabel 3.2 tegangan diagram Mohr pada panjang x1
σ1 (MPa) σ2 (MPa) σavg (MPa) R (MPa) σX’ (MPa)
X1 18,315 -6,105 6,105 12,21 6,105
[image:49.595.104.519.113.341.2]Diagram geser dan diagram momen
Disain bangunan dikendalikan oleh tegangan maksimum yang terbentuk pada irisan-irisan kritis. Suatu irisan kritis terjadi bilamana momen lentur aalah maksimum dan gaya geser adalah maksimum. Maka untuk menentukan letak irisan-irisan kritis ini, diagram geser dan diagram momen sangat berguna.
Dengan menggunakan persamaan gaya-gaya dalam maka dapat dicari diagram geser dan diagram momen :
∙ ° N
M V Ay
Gambar 3.13 gaya-gaya dalam Syarat seimbang :
diagram geser dengan beban merata
Gambar 3.14 diagram geser dimana :
V N
FCx
FCy
FAx
FAy
0 1000 2000
0 2 4
M
(
N
.m
)
x (m)
M
M
[image:51.595.190.421.100.242.2]Diagram momen dengan beban merata
Gambar 3.15 diagram momen Dimana :
Mmax = 1626,001 kN.m
3.2.2.2 Analisa distribusi tegangan pada panjang x2 :
Dari gambar 3.9 didapat gaya dan tegangan yang terjadi pada panjang x2 dimana 3,15 < x2 < 9,5
M
Gambar 3.16 gaya dan tegangan pada panjang x2
6,325 cos α P = (781,13 cos α + 1300,01 sin α)3,15
[image:51.595.125.335.387.595.2]3,1625 P = ( 1516,405 ) 3,15 3,1625 P = 4776,676
P
=
P = 1510,41 kN
Tegangan yang terjadi pada lengan reachstacker pada panjang x2 adalah : Deangan mendapatkan nilai P maka dapat kita cari dari nilai tagangan : a). Tegangan normal :
Dimana :
N – P cos 30o = 0
N – 1510,41 . (0,866) = 0 N = 1308,05 kN
Maka tegangan normal adalah :
kN / mm2 MPa
b). Tegangan geser :
Dimana :
V – P sin 30o = 0 V – 1510,41 . (0,5) = 0 V = 755,205 kN
Maka tegangan geser adalah ;
τ
= 0,02001 kN/mm2τ
= 19,61 MPac). Tegangan momen lentur :
Dimana :
M = Fax (x2. sin α ) + Fay ( x2 . cos α )
M = 781,13 (6,325 sin 60o ) + 711,81 (6,325 cos 60o ) M = 781,13 (5,478) + 711,81 (3,163)
M = 4279,0301 + 2251,1023 M = 6530,13 kN m
Maka tegangan lentur adalah :
σ
=
0,11 Mpad). Tegangan center :
MPa 325 , 11 2
0 65 , 22
= + =
avg
σ
σx τxy
B
-11,325
33,975
30,010
σ1
σ2
R σx
σavg
σx,σy
σxy Dimana :
σx = tegangan normal = 22,65 MPa τxy = tegangan geser = 19,61 Mpa σy = 0
radius :
R = 22,65 Mpa
lingkaran tegangan Mohr pada panjang x2
[image:54.595.160.496.327.678.2]τ
Dimana:
σ1 = 11,325 + 22,65 MPa
σ1= σmax = 33,975 MPa
σ2 = 11,325 – 22,65 MPa
[image:55.595.110.317.89.345.2]σ2= σmin = - 11,325 MPa
tabel 3.3 tegangan diagram mohr pada panjang x2
σ1 (MPa) σ2 (MPa) σavg (MPa) R (MPa) σX’ (MPa)
X2 33,975 -11,325 11,325 22,65 11,325
diagram geser dengan beban merata
Gambar 3.18 diagram geser Dimana :
FAx
FAy
FCx
FCy
V N
-10000 -5000 0 5000
0 2 4 6 8 10
M
(
kN
.m
)
x (m)
M
M
[image:56.595.167.446.100.242.2]Diagram momen dengan beban merata
Gambar 3.19 diagram momen Dimana :
Mmax = 6530,13 kN.m
3.2.2.3 Analisa distribusi tegangan pada panjang x3 :
Dari gambar 3.9 didapat gaya dan tegangan yang terjadi pada panjang x3 dimana
9,5 < x3 < 15,5 M
Gambar 3.20 gaya dan tegangan pada panjang x3
[image:56.595.124.399.378.653.2]
12,5 cos 60o P = (781,13 cos 60o + 1300,01 sin 60o)3,15 (12,5.0,5) P = (781,13 . 0,5 + 1300,01 . 0,866)3,15 6,25 P = ( 390,565 + 1125,84 ) 3,15
6,25 P = ( 1516,405 ) 3,15 3,1625 P = 4776,676
P
=
P = 764,27 kN
Tegangan yang terjadi pada lengan reachstacker pada panjang x3 adalah : Deangan mendapatkan nilai P maka dapat kita cari dari nilai tagangan : a). Tegangan normal ;
Dimana :
N – P cos 30o = 0 N – 764,27 . (0,866) = 0 N = 661,86 kN
Maka tegangannya adalah :
kN / mm2 MPa
b). Tegangan geser ;
Dimana :
V = 382,13 kN
Maka tegangan geser adalah :
τ
= 0,0101 kN/mm2τ
= 9,92 Mpac). Tegangan momen lentur :
Dimana :
M = Fax (x3. sin α ) + Fay ( x3. cos α )
M = 781,13 ( 12,5 sin 60o ) + 711,81 ( 12,5 cos 60o ) M = 781,13 (10,83) + 711,81 (6,25)
M = 8455,98 + 4448,82 M = 12904,79 kN m
Maka tegangannya adalah ;
σ
=
0,23 Mpad). Tegangan center :
MPa 73 , 5 2
0 46 , 11
= + =
avg
τxy (c)
Dimana :
σx = tegangan normal = 11,46 MPa τxy = tegangan geser = 9,92 Mpa σy = 0
radius :
R = 11,46 Mpa
Lingkaran Mohr tegangan pada panjang x3 :
τ
σx
R
σ2 C σx’ σ1 σx,σy
σavg τxy σy
-2000 -1000 0 1000
0 5 10 15 20
[image:60.595.111.509.79.737.2]V ( kN ) x (m)
v
vGambar 3.21 lingkaran tegangan Mohr panjang x3 Dimana ;
σ1 = 5,73 + 11,46 MPa
σ1= σmax = 17,19 MPa
[image:60.595.170.334.97.188.2]σ2 = 5,73 – 11,46 MPa σ2= σmax = -5,73 MPa
tabel 3.4 tegangan diagram Mohr pada panjang x3
σ1 (MPa) σ2 (MPa) σavg (MPa) R (MPa) σX (MPa)
X3 17,19 -5,73 5,73 11,46 5,73
diagram geser dengan beban merata
Gambar 3.22 diagram geser Dimana : Vmax = 1300,01 kN
[image:60.595.120.512.530.694.2]diagram momen dengan beban merata
Gambar 3.23 diagram momen Dimana : Mmax = 12904,79 kN.m
Defleksi yang terjadi akibat berat boom adalah :
y = (3 )
. 6 . . 2 x l EI x P − dimana :
E = modulus elastisitas = 21 x 109 kg/m2. I = momen inersia pada penampang boom.
maka defleksi yang terjadi akibat berat boom pada jarak x = 2 l
adalah :
y = (3 )
. 6 . . 2 x l EI x P −
y = (3(15,5) 7,75) . 6 . ) 75 , 7 .( 29 , 409 2 − EI
y = (3(15,5) 7,75) 34 , 8574435897 . 10 . 21 . 6 . ) 75 , 7 .( 29 , 409 . 9 2 −
y = (46,5 7,75)
34 , 8574435897 . 10 . 126 . 0625 , 60 . 29 , 409 9 −
y = (38,75)
34 , 8574435897 . 10 . 126 98 , 24582 9 y = 34 , 8574435897 . 10 . 126 4992 , 952590 9
A C θ sudut kemiringan defleksi boom :
Tan θ = 0,067
Diagram defleksi :
∆
o
[image:62.595.94.476.84.548.2]Gambar 3.24 diagram defleksi
Tabel 3.4 tabel gaya-gaya pada lengan reachstacker.
α° β° x(m) g(m) R1(m) R2(m) R3(m) R4(m) W4(kN) W3(kN) Fcb(kN) Fax(kN) Fay(kN) Fcx(kN) Fcy(kN)
0 56 9.5 4.8 9.5 4.75 3.15 0.00 98.1 98.1 535.3 299.34 247.59 299.34 443.79
[image:62.595.107.519.676.757.2]60 59 15.5 7.75 7.75 3.875 1.575 2.728 490.1 98.1 1516.64 781.13 711.811 781.13 1300.01
Tabel 3.5 tabel tegangan pada lengan reachstacker.
X(m) σn(Mpa) τ (Mpa) σm(Mpa) σ1(Mpa) σ2(Mpa) σavg(Mpa)
X1 1,575 12,21 10,57 0,028 18,315 -6,105 6,105
X2 6,325 22,65 19,61 0,11 33,975 11,325 11,325
Grafik tegangan normal
Gambar 3.25 grafik tegangan normal Grafik tegangan geser
Gambar 3.26 grafik tegangan geser
Grafik tegangan momen
3.3 Diskusi Hasil
Dari ketiga kondisi batas yang dibuat terdapat satu kondisi yang berpeluang besar bagi reachstacker untuk terjadi ketidak seimbangan. Kondisi itu terjadi pada panjang lengan. Kondisi panjang lengan yang berpeluang yaitu pada kondisi panjang 15,5 meter. Namun secara keseluruhan peluang untuk terjadinya jungkir sangat kecil terjadi. Hal ini sesuai dengan metode perhitungan yang sebelumnya digunakan.
Adapun ketidaksesuaian terjadi antara perhitungan dengan spesifikasi yang terdapat pada brosur yang merupakan kondisi batas yang diberikan oleh perusahaan pembuat alat pengangkut reachstacker tersebut. Adapun brosur dari perusahaan terdapat kondisi batas kapasitas angkat yang diberikan pada alat pengangkat.
Hal ini terjadi diakibatkan oleh asumsi awal yang digunakan pada perhitungan keseimbangan. Adapun asumsi yang digunakan pada perhitungan keseimbangan yaitu pada penyangga hidrolik dianggap kaku. Hal ini menyebabkan tidak terjadi jugkir pada reachstacker yang diakibatkan oleh ketidakseimbangan. Hal yang terjadi yaitu kerusakan pada lengan penyangga hidrolik yang diakibatkan oleh besarnya beban yang diberikan pada lengan penyangga tersebut. Hal ini dapat dibuktikan dengan perhitungan tekanan hidrolik berikut yaitu:
P = A F
F : gaya yang terjadi pada lengan penyangga hidrolik yang pada perhitungan
sebelumnya diberi notasi Fcb (kN)
A : luas penampang saluran hidrolik, d = 35 cm (m2)
P : tekanan hidrolik
2 m kN
dengan menggunakan gaya Fcb dari perhitungan tabel 3.23 dengan sudut 60° yaitu 1516,64 kN dan
A = 2 4d
d = 35 cm = 0,35 m A = 0,0962 m2
maka P =
0962 , 0
64 , 1516
P = 15765,49 2 m kN
P = 15,45 Mpa
Tegangan kritis.
Akibat dari pembebanan maksimum maka lengan dapat mengalami patah pada saat keadaan maksimum. Suatu lengan akan mangalami patah pada tegangan maksimum. Saat kondisi maksimum inilah, maka terjai tegangan kritis. Tegangan kritis didapat dari tegangan maksimum yaitu :
= 8,33 x 10-3 m3
Untuk balok yang memiliki modulus irisan S = 0,0615 x 10-3 m3, maka permukaan balok yang diambil untuk memenuhi persyaratan : 0,92 m x 0,90 m
= 2355,09 kPa = 2,36 Mpa
Tegangan baik dalam batas boleh. Jadi lengan tersebut memuaskan.
Bahan boom yang dipilih adalah baja dengan kekuatan tarik σb = 250 Mpa Maka tegangan yang diizinkan adalah :
σbi = K
b
σ ; dimana faktor keamanan yang diambil K = 8
= 8 250
= 31,25 MPa
BAB IV
KESIMPULAN DAN SARAN
4.1 Kesimpulan
Dalam studi ini diperoleh kesimpulan :
1. Tegangan pada lengan reachstacker yang dicari pada tiga titik tetentu yaitu pada panjang x1, x2 dan x3. Tegangan pada x1: σN = 12,21 Mpa, τV = 10,57 Mpa dan σM = 0,028 Mpa. Tegangan pada x2 : σN = 22,65 Mpa, τV = 19,61 Mpa dan σM= 0,11 Mpa. Tegangan pada x3 : σN = 11,46 Mpa, τV =
9,92 Mpa dan σM= 0,23 Mpa. Didapat bahwa tegangan terbesar pada
lengan reachstacker selain dari titik persambungan lengan terdapat pada titik x2.
2. Tekanan hidrolik pada panjang 15,5 m berpotensi terjadi jungkir. Pada perhitungan ini tekanan hidrolik yang didapat 15,45 Mpa. Tekanan hidrolik pada reachstacker yaitu sebesar 20,7 Mpa. Maka pada perhitungan ini tekanan hidrolik tidak terjadi jungkir.
3. Bahwa lengan reachstacker aman digunakan baik dari kondisi minimum hingga kondisi maksimum. karena σboleh(tegangan boleh) = 31,25 MPa yang diizinkan pada lengan reachstacker lebih besar dari tegangan lengan reachstacker yang didapat dari perhitungan secara manual.
4.2 Saran
DAFTAR PUSTAKA
[1] Gere & Timoshenko, Mekanika Bahan. Edisi Kedua,Versi SI. Alih Bahasa Hans. J. Wospakrik. Jakarta: Penerbit Erlangga, 1996.
[2] Hibbeler, R. C, Dynamics study pack. London: Prentice-Hall International, 2001.
[3] Hibbeler, R. C, Mekanika teknik statika. edisi pertama, Jakarta: Prenhallindo, 1998.
[4] Kamarwan, Sidharta S, Mekanika Bahan. Jakarta: Penerbit Universitas Indonesia, 1988.
[5] Meriam, J.L, Mekanika teknik edisi kedua statika. Jakarta: Penerbit Erlangga, 1991.
[6] Muin, Syamsir A, Pesawat-pesawat pengangkat. Jakarta: PT Raja Grafindo Persada, 1995.
[7] Sullivan, James A, Fluid power theory and applications fourth edition. London: Prentice-Hall International, 1989.