1
PENDAHULUAN
1.1 Latar Belakang
Beberapa tahun terakhir ini sering terjadi penyalahgunaan senjata api oleh orang-orang yang tidak bertanggung jawab. Menurut situs berita tempo,
Kepolisian RI mencatat 152 kasus penyalahgunaan senjata api dalam tiga tahun
yaitu tahun 2009 hingga 2011. Semakin tahun kemungkinan jumlah kasus bisa bertambah banyak. Banyak faktor yang menjadi penyebab sejumlah orang
untuk lebih memudahkan dalam menyimpan senjata dibuat loker yang proses penyimpannya dan pengambilannya beroperasi secara otomatis, dilakukan oleh sistem mekanik yang sudah dirancang sedemikian rupa.
dibutuhkan dua tipe sidik jari tersebut. Pendaftaran kedua sidik jari tersebut dilakukan ketika seseorang sudah sah menjadi bagian dari kepolisian, kemiliteran ataupun karyawan sebuah pabrik senjata. Sistem seperti ini diharapkan akan membantu mencegah terjadinya pencurian senjata. Dari segi tata cara pengaksesan senjata, sistem yang dibuat beroperasi secara otomatis, yang bertujuan menambah kepraktisan dalam penangksesan senjata. Kotak senjata akan ditempatkan ke loker penyimpanan dengan sistem mekanik yang sudah dirancang mengikuti bentuk rak tanpa perlu memindahkan sendiri, tetapi dalam sistem yang dirancang ada dua kotak penyimpanan yang tidak memiliki piston pendorong sehingga harus memindahkan manual ketika melakukan pengambilan. Penyimpanan kotak senjata sendiri berbentuk rak, hal ini bertujuan untuk menghemat penggunaan tempat. Jumlah kotak penyimpanan yang kosong, belum terisi oleh senjata akan ditampilkan juga ke dalam LCD berukuran 16x4, dan jika kotak penyimpanan kosong tanpa senjata tapi ataupun penuh diisi senjata, LCD tersebut akan memberi peringatan.
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka dapat diidentifikasi permasalahan dalam tugas akhir ini yaitu sebagai berikut :
1. Sistem penyimpanan senjata api yang banyak digunakan masih konvenional. 2. Perlu adanya history pengkasesan senjata untuk membantu mencegah
terjadinya pencurian senjata.
1.3 Rumusan Masalah
Dari beberapa penjelasan pada bagian latar belakang masalah, dapat disimpulkan beberapa rumusan masalah, diantaranya :
1. Bagaimana merancang sistem keamanan penyimpanan senjata api yang lebih baik dari sistem konvensional?
2. Bagaimana membuat history pengaksesan senjata yang bisa membantu mencegah terjadinya pencurian senjata?
3. Bagaimana merancang sistem penyimpanan dan pengambilan senjata yang beroperasi secara otomatis?
1.4 Tujuan
Untuk membuat sistem yang baik dan beroperasi sesuai dengan tujuan awal penelitian, maka harus dicari solusi untuk mengatasi rumusan-rumusan masalah yang ada. Sehingga tujuan pada penelitian ini, diantaranya :
1. Memperoleh sistem keamanan penyimpanan senjata api menggunakan akses fingerprint module yang diharapkan lebih baik dari sistem konvensional. 2. Menyimpan data pengaksesan berisi tanggal , jam , ID sidik jari pada saat
kotak diakses ke dalam EEPROM dan dibantu modul RTC untuk memperoleh jam dan tanggalnya secara update.
dengan sensor limit switch sebagai penempatan posisi dan piston pneumatik sebagai pendorong untuk memindahkan senjata.
1.5 Batasan Masalah
Untuk lebih mengarahkan kepada tujuan penelitian agar lebih spesifik, maka diberikan batasan-batasan masalah, diantaranya.
1. Jenis senjata yang digunakan adalah tipe FN.
2. Berat maksimal senjata yang digunakan adalah 1 Kg.
3. Sidik jari harus selalu dalam keadaan bersih dan tanpa ada luka. 4. Jumlah kapasitas loker yang disediakan adalah 4 buah sebagai sample. 5. Jumlah piston pendorong senjata hanya terdapat di 2 loker ( loker 1 dan
loker 2 ).
6. Proses pendaftaran sidik jari dan history pengkasesan senjata dijamin keamanannya.
7. Tampilan history hanya menampilkan 4 data pengaksesan terakhir.
1.6 Metode Penelitian
1.6.1 Studi Literatur
Melakukan studi literatur terhadap beberapa referensi yang berkaitan dengan tugas akhir yang dilakukan.
1.6.2 Pemilihan dan Pengadaan Komponen
Melakukan pengamatan dan memeriksa ketersediaan komponen yang dibutuhkan, dari segi biaya, karakteristik komponen serta kinerja dari masing-masing komponen yang ada di pasaran.
1.6.3 Pembuatan Hardware dan Software
Pembuatan sistem mekanik alat, penempatan motor dalam sistem mekanik, pembuatan program untuk mengontrol sistem mekanik.
1.6.4 Pengujian dan Analisa
Melakukan pengujian terhadap kinerja alat dan melakukan analisa terhadap kesalahan-kealahan ketika alat tidak beroperasi dengan benar.
1.7 Sistematika Penulisan Laporan
BAB I PENDAHULUAN, membahas tentang latar belakang, identifikasi masalah, perumusan masalah, tujuan tugas akhir, batasan masalah, metode penelitan dan sistematika penulisan.
BAB II DASAR TEORI, menjelaskan tentang teori-teori dasar yang dipakai untuk mengerjakan tugas akhir ini.
yang akan dibuat, blok diagram sistem, perancangan hardware dan perancangan software.
BAB IV PENGUJIAN DAN ANALISIS , melakukan pengujian alat, pengambilan data dan menganalisa sistem apakah berjalan sesuai tujuan awal.
8
LANDASAN TEORI
Landasan teori diperlukan untuk membantu memahami segala teori yang berhubungan dengan pengerjaan alat baik software maupun hardware sehingga tidak terlalu banyak menemukan kesulitan.
2.1Microcontroller
Microcontroller adalah sebuah komputer kecil yang terdapat di dalam sebuah rangkaian terintegrasi. Microcontroller pada dasarnya terdiri CPU (Central Processing Unit), memory, input/output ports, timers and counters, interrupt controls, analog to digital converters, serial interfacing ports dan oscillatory circuits.
Gambar 2.1 Blok Diagram Microcontroller[9] Penjelasan singkat mengenai blok diagram microcontroller : a. CPU (Central Processing Unit)
dilakukan eksekusi. CPU juga bertugas untuk menghubungkan setiap bagian dari microcontroller ke dalam sebuah sistem.
b. Memory
Fungsi dari sebuah memory adalah menyimpan setiap intruksi dan data dari sebuah program. Microcontroller biasanya memiliki sejumlah memori seperti SRAM, ROM/EPROM/EEPROM dan flash memory.
c. Parallel Input/Output Ports
Parallel input/output ports digunakan untuk melakukan interface dengan perangkat lain yang dibutuhkan untuk keperluan sebuah sistem seperti LED, LCD, motor servo, fingerprint module dan lain-lain.
d. Serial Ports
Serial port digunakan untuk keperluan berbagai interface serial antara mikrokontroler dan perangkat lain seperti halnya parallel port.
e. Timers / Counters
Timers / counters merupakan salah satu fungsi yang sangat berguna dari mikrokontroler. Mikrokontroler memiliki lebih dari satu timer dan counter. Operasi utama dari timer dan counter adalah melakukan clock function , modulasi, pulse generations, pengukuran frekuensi, membuat osilasi, dan lain-lain.
f. ADC (Analog to Digital Converter)
g. Interrupt Control
Interrupt control digunakan untuk melakukan interupsi pada sebuah program ketika dieksekusi. Interrupt control memiliki dua jenis, yaitu interrupt control internal (memakai intruksi interupsi) dan interrupt control eksternal (memakai akses pin interupsi).
h. Special Functioning Block
Special functioning block merupakan bagian tambahan pada sebuah mikrokontroller untuk kebutuhan tertentu. Tidak semua mikrokontroller menggunakan special functioning block.
Salah satu microcontroller yang paling banyak digunakan pada jaman sekarang adalah arduino. Arduino adalah sebuah platform komputasi fisik yang bersifat open-source berbasis papan/board microcontroller sederhana. Hardware-nya menggunakan prosesor atmel AVR dan software-nya memiliki bahasa pemrograman sendiri yaitu C++ arduino. Salah satu alasan kenapa arduino banyak dipakai adalah karena sistem pengoperasiannya yang cukup mudah. Bahasa pemograman yang mudah dipahami dan perangkat tambahan yang mudah didapatkan menjadi daya tarik tersendiri. Arduino memiliki jenis-jenis yang beragam. Jenis-jenis ini memiliki perbedaan dalam segi bentuk, spesifikasi dan performansi, secara singkatnya dijelaskan pada Gambar 2.1 di bawah ini.
Tabel 2.1 Perbandingan Jenis-jenis Arduino [11]
2.1.1 Arduino IDE ( Integrated Development Environment )
Arduino IDE adalah sebuah software untuk menulis program, mengedit program sampai mengirim program tersebut ke arduino. Program arduino sering disebut sketch.
2.1.2 Bahasa Pemograman Arduino
Bahasa Pemograman arduino sering disebut C++ arduino karena struktur pemograman dan tipe datanya mirip dengan C++ pada umumnya. C++ arduino terbagi menjadi 3 bagian utama, structure, function dan variables [1].
1) Structure
a. Main Structure
void setup( ), nama fungsi yang telah disediakan oleh arduino untuk
menyatakan fungsi yang akan dijalankan pertama kali. Fungsi ini berisi kode-kode untuk kepentingan inisialisasi.
void loop( ) , fungsi yang secara otomatis dijalankan oleh arduino
setelah fungsi setup ( ) dieksekusi. Seluruh kode yang ada di fungsi dengan sendirinya akan diulang terus-menerus. Satu-satunya yang bisa menghentikan eksekusi loop ( ) adalah berhentinya input catu daya ke papan arduino.
b. Control Structures
If….else, format pemogramannya seperti di bawah ini :
if (kondisi) {aksi A} else {aksi B}
Jika kondisi true maka output akan melakukan aksi A, jika kondisi false output akan melakukan aksi B.
for, contoh format pemogramannya seperti di bawah ini :
contohnya : for (int i=0; i <= 255; i++){analogWrite(PWMpin, i); delay(10); }
loop akan terus berlangsung sampai kondisi terpenuhi, selama loop berlangsung kondisi akan terus dilakukan penambahan/pengurangan. c. Aturan Syntax
Tabel 2.2 Aturan Syntax [1]
Syntax Keterangan
; Akhir dari setiap statement
{} Batas awal dan akhir program.
// Memberi komentar pendek
/* */ Memberi komentar panjang
#define Mendeskripsikan sebuah variabel
#include Memasukan library
d. Operator Aritmatika
Tabel 2.3 Operator Aritmatika [1]
Operator Keterangan
+ Penjumlahan dan tanda positif.
- Pengurangan dan tanda negatif
/ Pembagian.
* Perkalian.
e. Operator Pembanding
Tabel 2.4 Operator Pembanding [1]
Operator Keterangan
== Operator sama dengan
!= Operator tidak sama dengan
> Operator lebih dari
>= Operator lebih dari atau sama dengan
< Operator kurang dari
f. Operator Boolean
Tabel 2.5 Operator Boolean [1]
Operator Keterangan
Tabel 2.6 Konfigurasi DigitalI/O [1]
DigitalI/O Keterangan Format Program
pinMode( ) Mengkonfigurasi mode
pin tertentu pada arduino. Mode yang dipilih bisa
imput dan output.
pinMode(Pin,Mode)
digitalWrite( )
Mengkondisikan high atau low pada sebuah pin
digital.
digitalWrite(Pin,Value)
digitalRead( ) Membaca high atau low
b. Analog I/O
Tabel 2.7 Konfigurasi AnalogI/O [1]
Analog I/O Keterangan Format Program
analogReference( )
analogWrite() Menulis nilai analog pada
sebuah pin analog.
analogWrite(Pin,Val ue)
analogRead() Membaca nilai pada sebuah
pin analog. analogWrite(Pin)
c. Fungsi Matematika
Tabel 2.8 Fungsi Matematika [1]
Fungsi Keterangan
min(x,y) Menghitung nilai minimum dari x dan y.
max(x,y) Menghitung nilai maximum dari x dan y.
abs(x) Memberikan nilai absolut x.
pow(x,y) Memberikan nilai balik berupa x
y. Hasilnya mempunyai
tipe float.
sin(x) Memberika nilai balik berupa sinus x. Argumen x
dinyatakan dalam radian. Hasilnya mempunyai tipe float.
cos(x) Memberika nilai balik berupa cosinus x. Argumen x
dinyatakan dalam radian. Hasilnya mempunyai tipe float.
tan(x) Memberika nilai balik berupa tangent x. Argumen x
3) Variable a. Tipe Data
Tabel 2.9 Tipe Data C++ Arduino [1]
Tipe Data Keterangan Kebutuhan
Memori
boolean
Hanya dapat digunakan untuk menampung dua nilai saja true
atau false
Sama dengan tipe char, tetapi bilangan akan dikodekan dalam bentuk bilangan positif antara 0
sampai dengan 255. bilang- an bulat yang berkisar
antara 0 sampai 65535.
2 byte
word Tipe word identik dengan
usigned int. 2 byte
Tipe data ini berguna untuk menampung bilang-an bulat yang berkisar antara 0 sampai
4,294,967,295 (223-1)
4 byte
float
Tipe data ini berguna untuk menampung bilang-an real. Angka yang disimpan dari -3,4028235 E+38 sampai
3,4028235 E+38.
b. Konversi Tipe Data
Tabel 2.10 Fungsi-fungsi untuk konversi data [1]
Konversi Keterangan
char( ) Konversi nilai argument tipe char( ) menjadi tipe
char.
byte( ) Konversi nilai argument tipe byte( ) menjadi tipe
byte.
int( ) Konversi nilai argument tipe int( ) menjadi tipe int.
word( ) Konversi nilai argument tipe word( ) menjadi tipe
word.
long( ) Konversi nilai argument tipe long( ) menjadi tipe
long.
float( ) Konversi nilai argument tipe float( ) menjadi tipe
float.
2.2Motor DC
2.2.1 Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa (PWM) yang pada pin kontrol.
Gambar 2.4 Motor Servo[13]
dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
Gambar 2.5 PWM Motor Servo [13]
2.2.2 Motor Stepper
Gambar 2.6 Motor Stepper[14]
Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Oleh karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
2.2.3 Motor Power Windows
Motor power windows adalah motor yang merubah energi listrik searah menjadi mekanis yang berupa tenaga penggerak. Motor ini fungsi utamanya adalah untuk sistem power windows yang terdapat di dalam mobil, tetapi karena mempunyai torsi tinggi dengan rating tegangan input yang rendah yaitu 12 Volt DC. Motor ini juga memiliki dimensi motor yang relatif simple (ramping) dilengkapi dengan internal gearbox sehingga memudahkan untuk instalasi mekanik.
Prinsip kerja motor power windows seperti motor dc pada umumnya, tetapi terdapat perbedaan dalam penambahan internal gearbox. Motor power windows terdiri dari dua bagian yaitu stator (bagian yang diam) berupa magnet permanen dan rotor (bagian yang bergerak) berupa koil atau gulungan kawat tembaga. Di setiap ujungnya terhubung dengan komutator, komutator ini dihubungkan dengan kutub positif (+) dan kutub negative (-) dari catu daya. Arus listrik dari kutub positif akan masuk melalui komutator, kemudian berjalan melewati gulungan kawat dan akhirnya kembali ke kutub negatif. Proses ini menyebabkan terjadinya medan elektromagnetik sehingga motor akan bergerak.
Gambar 2.8 Prinsip Kerja Motor Power Windows [15] 2.3Sensor
Sensor adalah komponen elektronika yang berfungsi untuk mengubah besaran mekanis, magnetis, panas, sinar, dan kimia menjadi besarn listrik berupa tegangan, resistansi dan arus listrik. Sensor sering digunakan untuk pendeteksian pada saat melakukan pengukuran atau pengendalian.
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan menjadi 3 bagian, yaitu sensor thermal, sensor mekanis dan sensor optik. Tetapi seiring dengan berkembangnya teknologi yang semakin maju ternyata berpengaruh terhadap perkembangan jenis sensor, hal ini ditandai dengan diciptakannya sebuah teknologi yang bernama biometrik. Dari teknologi ini muncul jenis sensor yang baru, yaitu sensor biometrik.
1) Sensor Thermal
Sensor thermal atau sensor suhu adalah sensor yang digunakan untuk mendeteksi gejala perubahan panas/temperatur/suhu pada suatu dimensi benda atau dimensi ruang tertentu. Contohnya bimetal, termistor, termokopel, RTD dan lain-lain.
Gambar 2.10 Contoh Sensor Thermal [16] 2) Sensor Mekanik
Gambar 2.11 Contoh Sensor Mekanik [16] 3) Sensor Optik
Sensor optik atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda atau ruangan. Contohnya photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic dan lain-lain.
Gambar 2.12 Contoh Sensor Optik [16] 4) Sensor Biometrik
metode diantaranya : fingerprint scanning, retina scanning, dan DNA scanning. Dua metode terakhir masih dalam taraf penelitian, sedangkan fingerprintscanning saat ini telah digunakan secara luas.
Gambar 2.13 Contoh Sensor Biometrik
2.3.1 Fingerprint Module
Fingerprint Module adalah sensor berbentuk board yang berfungsi mengambil Gambar sidik jari pengguna dan memutuskan apakah pola alur sidik jari dari Gambar yang diambil sama dengan pola alur sidik jari yang ada di database modul fingerprint.
Ada beberapa cara untuk mengambil Gambar sidik jari seseorang, namun salah satu metode yang paling banyak digunakan saat ini adalah optical scanning yang juga digunakan pada fingerprint sensor yang akan digunakan. Ilustrasi metode optical scanning ditunjukan pada Gambar 2.17. Inti dari scanner optical adalah charge coupled device (CCD). Proses scan mulai berlangsung saat seseorang meletakkan jari pada lempengan kaca dan sebuah kamera CCD mengambil Gambarnya. Scanner memiliki sumber cahaya sendiri, biasanya berupa larik light emitting diodes (LED), untuk menyinari alur sidik jarinya.Sistem CCD menghasilkan Gambar jari yang terbalik, area yang lebih gelap merepresentasikan lebih banyakcahaya yang dipantulkan (bagian punggung dari alur sidik jari), dan area yang lebih terang merepresentasikan lebih sedikit cahaya yang dipantulkan (bagian lembah dari alur sidik jari). Sebelum membandingkan Gambar yang baru saja diambil dengan data yang telah disimpan, processor scanner memastikan bahwa CCD telah mengambil Gambar yang jelas dengan cara melakukan pengecekan kegelapan pixel rata-rata, dan akan menolak hasil scan jika Gambar yang dihasilkan terlalu gelap atau terlalu terang. Jika Gambar ditolak, scanner akan mengatur waktu pencahayaan, kemudian mencoba pengambilan Gambar sekali lagi.
2.3.2 Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat saat katup tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak. Simbol limit switch ditunjukan pada Gambar 2.18.
Gambar 2.16 Simbol dan Bentuk Limit Switch [17]
aktif jika tombolnya tertekan. Konstruksi limit switch dapat dilihat seperti Gambar di bawah.
Gambar 2.17 Kontruksi Limit Switch [17] 2.4 LCD ( Liquid Crystal Display )
LCD merupakan perangkat elektronik yang dapat digunakan untuk menampilkan angka atau teks. Ada dua jenis utama layar LCD yang dapat menampilkan numerik (digunakan dalam jam tangan, kalkulator dll) dan menampilkan teks alfanumerik (sering digunakan pada mesin foto kopi dan telepon genggam).
(a)
(b)
2.4.1 Konfigurasi Pin LCD
Konfigurasi LCD 16x2 dijelaskan secara singkat di dalam tabel 2.10 : Tabel 2.11 Konfigurasi Pin LCD 16x2 [1]
Pin LCD Simbol Keterangan
1 GND Catu daya, ground
2 VCC Catu daya, +5V
3 VEE Pengaturan Kontras LCD
4 RS
Register Select
RS=HIGH : untuk mengirim data
RS =LOW : untuk mengirim intruksi
5 R/W
Read / Write Control Bus
R/W=HIGH : Mode untuk membaca
data di LCD
R/W=LOW : Mode penulisan ke LCD
Dihubungkan dengan LOW untuk
pengiriman data layar
6 E Data Enable, untuk mengakses LCD. Ketika
bernilai LOW, LCD tidak dapat diakses
7 - 14 D0 – D7 Data bus LCD (4 bit atau 8 bit)
15 A Catu daya layar, positif
16 K Catu daya layar, negatif
2.4.2 Karakter LCD
untuk semua LCD, tapi karakter 16-31 & 128-255 dapat bervariasi dengan produsen LCD yang berbeda. Oleh karena itu beberapa LCD akan menampilkan karakter yang berbeda dari yang ditunjukkan dalam tabel dibawah ini.
Tabel 2.12 Data Karakter LCD [2]
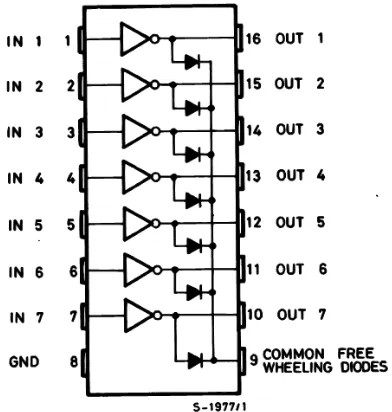
2.5ULN2003
menahan arus puncak maksimal 600 mA. IC ini biasanya digunakan untuk driver motor, mengatur on/off LED yang berjumlah banyak dan lain-lain. Dalam tugas akhir ini ULN2003 digunakan sebagai driver untuk relay directional control valve yang mengatur maju mundurnya piston pendorong.
Gambar 2.19 Konfigurasi Pin ULN2003 2.6EEPROM
2.7RTC
Real-time clock disingkat RTC adalah jam di komputer yang umumnya berupa sirkuit terpadu yang berfungsi sebagai pemelihara waktu. RTC umumnya memiliki catu daya terpisah dari catu daya komputer (berupa baterai litium) sehingga dapat tetap berfungsi ketika catu daya komputer terputus. Tipe RTC yang digunakan dalam tugas akhir ini adalah DS3231 yang memiliki spesifikasi sebagai berikut :
1. Real time clock (RTC) meyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, dan tahun valid hingga 2100.
2. Komunikasi antarmuka serial two-wire (I2C).
3. Sinyal keluaran gelombang kotak terprogram (programmable squarewave).
4. Ketahanan suhu 0°C hingga 70°C (komersial) dan -40°C hingga +85°C (industrial).
5. Memiliki crystal oscillator internal.
Penjelasan masing-masing pin RTC DS3231 :
1. 32K, sebagai keluaran frekuensi 32 KHz.
2. SQW, sebagai sinyal kotak ( square wave ) keluaran. 3. SCL, sebagai serial data clock.
4. SDA, sebagai serial data. 5. VCC, sebagai catu daya positif. 6. GND, sebagai catu daya negatif. 2.8Electropneumatic
Electropneumatic adalah sebuah ilmu yang menggabungkan antara sistem elektro dengan pneumatik (ilmu yang berkaitan dengan gerakan maupun kondisi yang berkaitan dengan udara) . Secara umum electropneumatic terdiri dari tiga bagian yaitu, bagian supply, bagian control dan bagian actuator.
2.8.1 Bagian Supply
Supply yang digunakan pada sistem electropneumatic adalah kompresor. kompresor merupakan komponen yang berfungsi sebagai penghasil udara bertekanan, bekerja dengan memanfaatkan proses pemampatan udara.
2.8.2 Bagian Control
Tabel 2.13. Jenis-jenis Directional Contol Valve [7]
Simbol Keterangan
Katup 2/2 ( 2 port 2 posisi )
Katup 3/2 Normally Closed ( 3 port 2 posisi )
Katup 3/2 Normally Open ( 4 port 2 posisi)
Katup 4/2 ( 4 port 2 posisi)
Katup 5/2 ( 5 port 2 posisi )
Katup 5/3 ( 5 port 3 posisi )
2.8.3 Bagian Actuator
silinder pneumatik terdiri dari dua jenis, yaitu single acting cylinder dan double acting cylinder.
2.8.3.1Single Acting Cylinder
Silinder single acting mempunyai spring yang berfungsi sebagai pembalik dari keadaan piston rod yang pada saat tekanan pneumatik tidak aktif, sehinggaa piston akan kembali pada posisi awal. Prinsip kerja dari silinder ini berdasarkan perbedaan gaya yang diterima oleh piston dengan gaya dari spring, yang mana pada saat piston rod maju maka gaya yang diterima oleh piston rod lebih besar dari gaya spring dan pada saat piston rod mundur gaya yang diterima oleh spring lebih besar dari gaya yang diterima oleh piston.
Gambar 2.21. Single Acting Cylinder [20]
2.8.3.2Double Acting Cylinder
yang masuk adalah supply 2 dan memberikan tekanan pada bagian piston yang ada dalam silinder dan silinder ini tidak ada perbedaaan gaya dalam prinsip kerjanya.
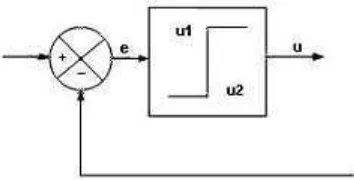
Gambar 2.22. Double Acting Cylinder [20] 2.9 Sistem Kendali On-Off
Kendali On-Off adalah salah satu sistem kendali yang sering dijumpai dalam sebuah pengontrolan. Dalam sistem kendali on-off, elemen pembangkit hanya mempunyai dua keadaan yaitu on dan off. Karena kerjanya yang on-off, hasil pengendalian kendali on-off akan menyebabkan process variable ( besaran parameter proses yang dikendalikan ) yang bergelombang seperti yang ditunjukan pada gambar di bawah ini.
Misal sinyal keluaran kontroler adalah u(t) dan sinyal pembangkit kesalahan (deadband) adalah e(t). Pada kendali on-off, sinyal u(t) akan tetap pada salah satu nilai maksimum atau minimum tergantung pada sinyal pembangkit kesalahan positif atau negatif sedemikian rupa sehingga [3] :
u( t) u1 untuk e(t) > 0
u( t) u 2 untuk e(t) < 0 dimana
u1 dan u 2 adalah konstan. Harga minimum u 2 biasanya nol atau u1
Gambar 2.24 Diagram Blok Kendali on-off [3]
Gambar 2.25 Diagram Blok Kendali on-off dengan Dead band [3]
39
PERANCANGAN ALAT
Perancangan yang baik dan dilakukan secara sistematik akan memberikan kemudahan dalam proses pembuatan alat serta dapat mempermudah dalam proses analisis dari alat yang dibuat. Pada bab ini akan dijelaskan tentang perancangan sistem baik hardware maupaun software beserta alasan pemilihan komponen yang digunakan.
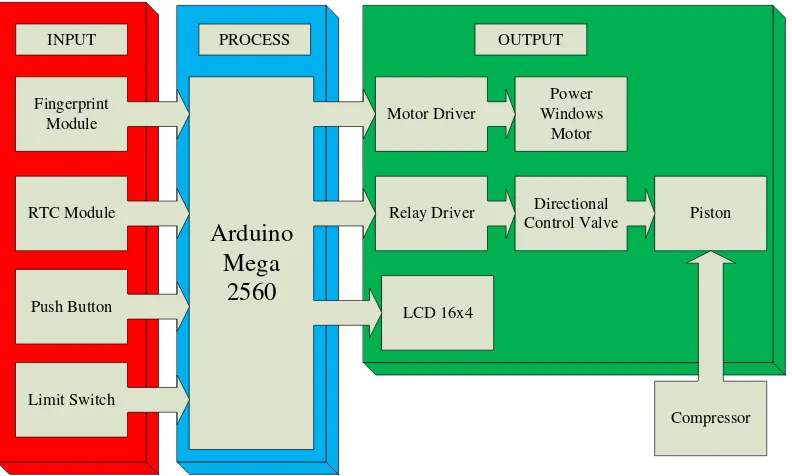
3.1 Perancangan Sistem
Perancangan sistem dimulai dengan merancang blok diagram sistem yang terdiri dari bagian input, bagian proses dan bagian output. Blok diagram sistem yang akan dirancang ditunjukan pada gambar 3.1.
Fingerprint
Prinsip kerja dari robot manipulator sistem penyimpanan dan pengambilan senjata api laras pendek adalah sebagai berikut :
1. Langkah pertama yang harus dilakukan adalah harus mendaftarkan terlebih dahulu sidik jarinya. Untuk proses pendaftaran disediakan 2 tombol. Pertama enroll, untuk meyimpan sidik jari. 4 id sidik jari pertama yang mendaftar ( id 0 sampai id 3 ) digunakan untuk tipe operator dan sisanya ( dalam tugas akhir ini id 4 sampai id 7 ) untuk tipe prajurit. Kedua delete, digunakan untuk menghapus semua data sidik yang lama
2. Setelah proses pendaftaran selesai, selanjutanya adalah proses penyimpanan dan pengambilan senjata. Tombol in untuk melakukan penyimpanan dan tombol out untuk melakukan pengambilan. Jika salah satu tombol ditekan maka modul fingerprint akan aktif dan mengindentifikasi sidik jari di area scanning, dalam prosedur yang dibuat proses pengambilan dan penyimpanan dapat dilakukan jika sidik jari tipe operator diikuti sidik jari tipe prajurit. Tetapi sidik jari tipe operator cukup melakukan scanning satu kali dalam setiap proses penyimpanan atau pengambilan senjata sampai tombol lock ditekan. Jika tombol lock ditekan maka sidik jari operator harus melakukan scanning lagi dan begitu seterusnya.
4. Setiap melakukan proses penyimpanan dan pengambilan senjata, arduino akan merekam data-data seperti tanggal, jam pengaksesan senjata baik itu penyimpanan atau pengambilan senjata termasuk kedua ID ( ID operator dan ID prajurit ). Tanggal dan jam yang diperoleh berasal dari modul RTC, sehingga tanggal dan jamnya akan selalau update walaupun catu daya dimatikan.
3.2 Bagian Input
Input atau masukan dari sistem ini terdiri dari 3 bagian yaitu fingerprint module, RTC module dan push button.
3.2.1. Fingerprint Module
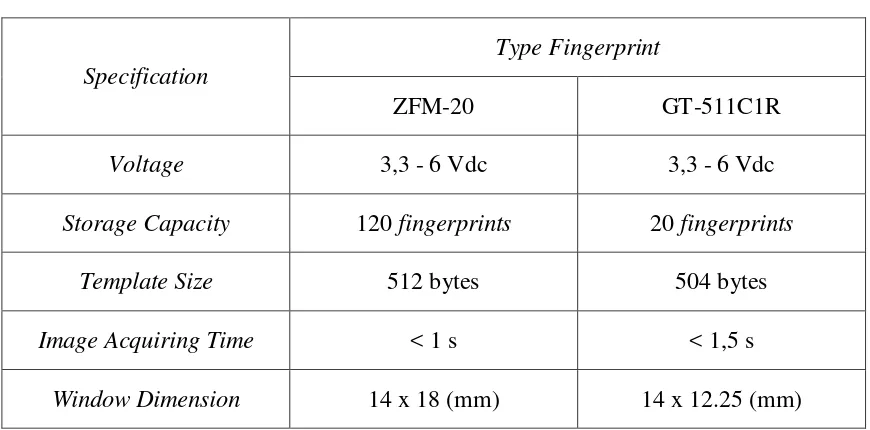
Modul fingerprint merupakan komponen yang paling penting dalam tugas akhir ini, karena sensor ini digunakan sebagai input utama sistem sekaligus menjadi alat keamanan sebagai pintu masuk untuk mengakses keseluruhan sistem. Berdasarkan ketersediaan modul tersebut di pasaran didapat dua jenis modul fingerprint yang ditunjukan pada tabel 4.1. Dari tabel tersebut diketahui spesifikasi yang sama hanya dalam voltage, selain itu masing-masing memiliki perbedaan. Modul ZFM-20 memiliki beberapa keunggulan diantaranya :
1. storage capacity yang bisa menampung lebih banyak data fingerprint,
2. image acquiring time yang lebih cepat sehingga waktu untuk memproses identifikasi atau verifikasi sidik jari lebih cepat,
Tabel 3.1 Perbandingan Modul Fingerprint [10][18]
Specification
Type Fingerprint
ZFM-20 GT-511C1R
Voltage 3,3 - 6 Vdc 3,3 - 6 Vdc
Storage Capacity 120 fingerprints 20 fingerprints
Template Size 512 bytes 504 bytes
Image Acquiring Time < 1 s < 1,5 s
Window Dimension 14 x 18 (mm) 14 x 12.25 (mm)
Walaupun ZFM-20 memiliki template size yang lebih besar, tapi tidak berpengaruh terhadap kapasitas penyimpanan data fingerprint karena ZFM-20 menyimpan ID sidik jari bukan berdasarkan besar kecilnya ukuran template, tetapi berdasarkan jumlah ID yang terdaftar yaitu 120.
3.2.2. RTC Module
RTC digunakan untuk mempertahankan data hari dan tanggal supaya terus beroperasi walaupun catu daya dimatikan. RTC membantu arduino untuk menambahkan data hari dan tanggal untuk keperluan history alat. Jenis RTC yang paling banyak dipakai adalah tipe DS1307 dan tipe DS3231. Secara keseluruhan spesifikasi keduanya memiliki kesamaan, satu perbedaan yang membuat tipe DS3231 memiliki keunggulan adalah karena memiliki integrated temperaturecompensated crystal oscillator (TCXO) dan menggunkan crystal oscillator internal, sehingga perhitungan hari dan tanggalnya lebih akurat tidak dipengaruhi temperatur sekitar dibandingkan tipe DS1307 yang menggunakan crystal oscillator eksternal. Hal tersebut dapat menyebabkan perhitungan hari dan tanggal DS1307 akan bergeser 1
menit setiap tahunnya. Oleh karena itu RTC yang digunakan dlam tugas akhir ini
adalah tipe DS3231.
Gambar 3.3 RTC DS3231
3.2.3. Push Button
Gambar 3.4 Tampilan Fisik Push Button
3.2.4. Limit Switch
Untuk menggerakan kotak pembawa menuju posisi kotak penyimpanan perlu adanya sebuah sensor untuk kebutuhan akurasi. Limit switch akan mengindikasikan kapan motor harus berhenti ketika sudah sampai pada posisi yang dikehendaki, sehingga kesalahan pergesaran posisi motor bisa dikurangi. Penempatan limit switch pada alat disesuaikan dengan sistem mekanik yang dibuat, seperti yang ditunjukan pada gambar 3.5 yang diberi penomoran 1 sampai 5 .
3.3 Bagian Proses
Bagian proses dalam tugas akhir ini menggunakan mikrokontroler jenis arduino. Arduino berfungsi sebagai pusat kendali dari semua sistem atau bisa disebut pusat kontrol dari keseluruhan sistem. Banyak jenis-jenis modul arduino yang berada di pasaran. Jenis-jenis tersebut mempunyai ukuran dan spesifikasi yang berbeda.
Tabel 3.2 Perbandingan Modul Arduino[11]
Specification
Gambar 3.6 Tampilan Fisik Arduino Mega 2560
3.4 Bagian Output
Sistem ini memiliki 4 output diantaranya power windows motor, directional control valve, pistondan LCD .
3.4.1. Power Windows Motor
Motor digunakan sebagai penggerak langkah vertikal dan langkah horizontal. Kedua langkah inilah yang akan membantu proses penyimpanan dan pengambilan senjata. Motor yang dipakai dalam sistem ini adalah jenis power windows. Selain motor power windows ada dua jenis motor lain yang sering digunakan yaitu motor servo dan motor stepper. Beberapa alasan yang melandasi pemilihan motor power windows diantaranya :
Gambar 3.7 Gambar Roda Gigi Cacing dan Roda Gigi Lurus
2. Lebih mudah untuk instalasi dalam proses transmisi pergerakan langkah horizontal karena berhubungan dengan rantai.
Gambar 3.8 Transmisi Pergerakan Langkah Horizontal
Gambar 3.9 Transmisi Pergerakan Langkah Vertikal
4. Mampu menggunakan arus yang besar sehingga cocok untuk beban besar[12].
3.4.2. Directional Control Valve
Directional control valve atau disingkat DCV berfungsi sebagai pengatur arah angin yang akan masuk ke cylinder. Dengan kata lain DCV digunakan sebagai pengontrol gerakan cylinder. Pemilihan DCV disesuaikan dengan gerakan cylinder yang dibutuhkan oleh sistem. Dalam tugas akhir ini cylinder harus bergerak maju dan mundur sehingga beberapa DCV yang bisa digunakan diantaranya :
Tabel 3.3 Perbandingan Jenis DCV [7]
Simbol Keterangan
Katup 4/2 ( 2 port 2 posisi )
Katup 5/2 Normally Closed ( 3 port 2 posisi )
Katup 3/2 Normally Close ( 4 port 2 posisi)
Gambar 3.11 Tampilan Fisik Directional Control Valve
3.4.3. Piston
Pistonberfungsi sebagai output akhir yang akan mendorong senjata masuk ke dalam loker ataupun keluar dari loker. Pemilihan piston ini dipilih berdasarkan panjang loker yang dibuat dan panjang piston piston itu sendiri. Panjang loker yang dibuat adalah 10 cm. Maka panjang piston piston harus kurang dari 10 cm tapi tidak terlalu jauh selisihnya, agar pembuatan papan pendorong yang dihubungkan ke piston tidak terlalu tebal. Dalam tugas akhir ini piston yang dipakai memiliki piston dengan panjang 8 cm.
3.4.4. Liquid Crystal Display 16x4
Dalam tugas akhir ini liquid crystal display ( LCD ) berfungsi sebagai display informasi ketersediaan loker yang kosong dan menampilkan history penyimpanan dan pengeluaran senjata. Ada beberapa pilihan untuk LCD yang bisa digunakan seperti dijelaskan dalam tabel 3.4.
Tabel 3.4 Perbandingan Jenis LCD
Specification Type of LCD
LCD 8x2 LCD 16x2 LCD 16x4
Character 16 32 64
Line 2 2 4
Dalam membuat history pengaksesan senjata diperlukan karakter yang cukup banyak sehingga LCD ukuran 16x4 lebih tepat digunakan. Untuk skala yang lebih besar history teresebut harus menggunakan PC ( personal computer )
Gambar 3.13 Tampilan Fisik LCD 16x4
3.5 Perancangan Perangkat Keras ( Hardware )
3.5.1. Rangkaian Driver Motor DC
Rangkaian driver motor DC yang dipakai menggunakan metode h-bridge. h-bridge adalah sistem kontrol motor DC dengan metode jembatan (bridge). Rangkaian driver motor DC h-bridge ini dapat mengendalikan motor DC dalam 2 arah baik secara PWM maupun kontrol dengan logika high dan low. Dengan metode PWM dapat mengendalikan kecepatan putaran motor DC sedangkan dengan metode logika kontrol high dan low maka motor selalu start dalam kecepatan maksimal.
Driver motor h-bridge dapat dibangun dengan menggunakan IC ( integratated circuit ) atau merangkai 4 transistor menjadi rangkaian h-bridge. Dalam tugas akhir ini driver motor menggunakan rangkaian h-bridge 4 transistor MOSFET. MOSFET (Metal Oxide Semiconductor Field Effect Transistor) merupakan salah satu jenis transistor yang dapat mengendalikan beban dengan arus yang tinggi. Rangkaian driver motor MOSFET yang digunakan adalah sebagai berikut :
Gambar 3.14 Rangkaian Driver Motor Menggunakan MOSFET
mengatur mati-hidupnya ke empat MOSFET tersebut. Pada saat IRF9540 sebelah kiri dan IRFZ44 sebelah kanan on sedangkan dua MOSFET lainnya off, maka sisi kiri dari gambar motor akan terhubung dengan kutub positif dari catu daya, sedangkan sisi sebelah kanan motor akan terhubung dengan kutub negatif dari catu daya sehingga motor akan bergerak searah jarum jam. Sebaliknya, jika IRF9530 sebelah kiri dan IRFZ44 sebelah kanan on sedangkan dua MOSFET lainnya off, maka sisi kanan motor akan terhubung dengan kutub positif dari catu daya sedangkan sisi kiri motor akan terhubung dengan kutub negatif dari catu daya sehingga motor akan bergerak berlawanan arah jarum jam.
3.5.2. Rangkaian Konfigurasi LCD 16x4
Rangkaian konfigurasi ini bertujuan untuk menentukan jenis transfer data yang akan dipakai, yaitu 4 bit atau 8 bit. Perbedaanya terdapat pada kecepatan transfer dan jumlah pin mikrokontroller yang akan digunakan. Tetapi kecepatan transfer pun masih dipengaruhi spesifikasi mikrokontroller yang digunakan. Dalam tugas akhir ini konfigurasi yang dipakai adalah 4 bit dengan alasan untuk menghemat penggunaan kabel yang menghubungkan ke mikrokontroller. Masalah kecepatan transfer bisa diatasi karena mikrokontroller yang digunakan adalah arduino mega 2560 dengan kecapatan 16 MHz.
3.5.3. Rancangan Kontruksi Alat
Rancangan kontruksi yang dibuat didesain seperti pada gambar 3.16 dengan tujuan untuk mendapatkan pergerakan vertikal dan horizontal. Sehingga proses penyimpanan dan pengambilan senjata menjadi lebih mudah.
Gambar 3.16 Rancangan dan Tampilan Fisik Kontruksi Alat
3.6 Perancangan Perangkat Lunak ( Software )
yang dirancang. Setiap masukan akan diterima dan diproses oleh perangkat lunak (software) yang nantinya akan menentukan keluaran (output) dari sistem. Berikut alur kerja (flowchart) dari sistem yang dirancang.
A dan kotak pembawa kembali ke
posisi awal
57
PENGUJIAN DAN ANALISA
Pada bab ini akan diuraikan tentang pengujian tentang alat yang sudah dirancang, untuk selanjutnya menganalisa data dari hasil pengujian tersebut. Pengujian yang dilakukan terdiri dari pengujian tiap komponen ( input, proses dan output ) dan pengujian alat secara keseluruhan. Hal ini bertujuan untuk mengetahui apakah sistem dapat berjalan sesuai dengan target yang diharapkan.
4.1 Pengujian Komponen
Pengujian komponen bertujuan untuk mengetahui bahwa tiap komponen dalam kondisi baik, sehingga memaksimalkan fungsi dari setiap komponen untuk mencapai sistem yang diharapkan. Ada beberapa pengujian yang dilakukan diantaranya pengujian modul fingerprint, pengujian modul RTC, pengujian rangkaian driver motor, pengujian timer untuk pergerakan motor power window, pengujian directional control valve dan piston, pengujian LCD 16x4.
4.1.1 Pengujian Modul Fingerprint ZFM-20
adalah kurang dari 1 detik. Berikut gambar pengujian terhadap modul fingerprint menggunakan tangan kanan dan kiri beserta hasil yang keluar di serial monitor arduino.
Tabel 4.1 Hasil Pengujian Modul Fingerprint
Status Sidik Jari Respon Fingerprint Waktu Respon
( detik )
Tidak Terdaftar Tidak Valid 0,8
Tidak Terdaftar Tidak Valid 0,8
Tidak Terdaftar Tidak Valid 0,8
Tidak Terdaftar Tidak Valid 0,9
Tidak Terdaftar Tidak Valid 0,9
4.1.2 Pengujian Modul RTC DS3231
Pengujian ini dilakukan dengan tujuan untuk mengetahui keakuratan modul RTC dalam memperoleh jam hari dan tanggal sesuai yang sedang terjadi. Pengujian dilakukan dengan cara membandingkan hasil dari RTC dengan waktu di handphone yang mana diatur otomatis menggunakan internet bukan pengaturan manual sehingga keakuratannya cukup terjamin. Berikut perbandingan hasil dari modul RTC DS3231 yang ditampilkan ke dalam serial monitor arduino , waktu di netbook dan waktu di smartphone yang memiliki fitur update otomatis sesuai dengan waktu wilayah setempat.
Dari hasil pengujian diatas dapat disimpulkan bahwa modul RTC yang digunakan yaitu tipe DS3231 keakuratannya teruji dengan baik, karena memiliki perbedaan hanya dalam perhitungan detik.
4.1.3 Pengujian Rangkaian Driver Motor untuk Sistem Mekanik
Pengujian ini dilakukan dengan tujuan untuk mengetahui pergerakan motor vertikal dan horizontal yang diberikan input dari driver motor. Selain itu pengujian ini untuk membuktikan bahwa rangkaian driver yang dipakai dapat berjalan dengan baik dalam mengkontrol arah putaran motor. Pengujian dilakukan dengan cara memberi logika high ( 5 V ) dan low ( 0 V) ke pin input rangkaian driver motor. Berikut hasil dari pengujian yang telah dilakukan.
Tabel 4.2 Pengujian Rangkaian Driver Motor
Input1 Input2 Pergerakan Sistem Mekanik
A B A B Motor Gerakan
4.1.4 Pengujian Limit Switch untuk Pergerakan Motor Power Window
Pengujian ini memiliki tujuan untuk memilih limit switch yang harus aktif ( dibaca responnya oleh arduino ) dalam proses pergerakan kedua motor ( motor untuk gerakan vertikal dan horizontal ) menuju kotak penyimpanan ( kotak 0 sampai kotak 3 ) dan kembali lagi menuju posisi awal. Seperti sudah dijelaskan di bab sebelumnya limit switch digunakan sebagai sensor untuk mematikan motor ketika kotak pembawa sudah teapat dengan posisi yang ditentukan. Penempatan limit switch pada sistem mekanik seperti telah dijelaskan di bab 3 adalah sebagai berikut :
Gambar 4.4 Penempatan Limit Switch pada Sistem Mekanik Alat
Tabel 4.3 Pengujian Limit Switch untuk Pergerakan Motor Power Window
Setelah dilakukan pengukuran terhadap tegangan output limit switch, dapat diketahui kondisi limit switch saat on ( katup tertekan ) adalah 0 V dan saat off ( katup tidak tertekan ) adalah 5 V, hal ini dikarenakan limit switch menggunakan pull up internal yang diatur melalui arduino. Dari hasil pengujian diatas dapat diketahui limit switch yang harus aktif ketika melakukan pengaksesan senjata, sehingga proses pergerakan kotak pembawa dari titik awal menuju kotak penyimpanan yang dituju akan akurat.
4.1.5 Pengujian Directional Control Valve dan Piston
Gambar 4.5 Gerakan Piston Maju dan Mundur
Tabel 4.4 Hasil Pengujian DCV dan Piston
Relay Arah Gerakan Piston
A B Piston 1 Piston 2 Piston 3
Low Low Mundur (Diam) Mundur (Diam) Mundur (Diam)
Low High Maju Maju Maju
High Low Mundur Mundur Mundur
High High Relay Aktif Salah Satu Relay Aktif Salah Satu Relay Aktif Salah Satu
gerakan mundur yang aktif maka ketika sistem diaktifkan pertama kali piston akan mundur. Ketika kondisi kedua relay ditekan secara bersama maka hanya salah satu relay yang akan aktif. Oleh karena itu setiap mengaktifkan relay gerakan maju harus selalu diikuti oleh relay gerakan mundur.
4.1.6 Pengujian LCD 16x4
Pengujian ini bertujuan untuk mengetahui bahwa LCD dalam kondisi baik untuk menampilkan setiap karakter baik kolom maupun baris yang dikirim melalui arduino. Pengujiannya dilakukan dengan mengirim program dasar untuk LCD ke dalam arduino dan menampilkannya di LCD 16x4. Hasil pengujiannya adalah sebagai berikut.
Gambar 4.6 Pengujian LCD 16x4
4.2 Pengujian Alat
Setelah melakukan pengujian terhadap komponen, lagkah selanjutnya adalah pengujian keseluruhan alat. Dari pengujian ini dapat dilihat tujuan dari alat yang telah dijelaskan di bab sebelumnya tercapai atau tidak. Pengujian ini dilakukan secara bertahap dari mulai pendaftaran sidik jari, proses penyimpanan dan pengambilan senjata dan pengujian terhadap history pengaksesan senjata.
4.2.1 Pengujian Pendaftaran dan Proses Hapus Sidik Jari
Tabel 4.5 Hasil Pengujian Pendaftaran Sidik Jari
Proses Penyimpanan Status Sidik Jari ID Sidik Jari
Penyimpanan ID sidik jari yang berhasil akan ditandai dengan indikator tulisan di LCD “Stored!” tetapi jika gagal ditandai dengan indikator tulisan di
LCD “Not Match”.seperti ditunjukan pada Gambar 4.3.
Gambar 4.7. Indikator LCD ketika sidik jari tersimpan dan tidak tersimpan
Untuk bagian pengujian hapus sidik jari, ID yang dihapus adalah dari ID 0 sampai ID 7. Proses hapus ID ini bisa dilakukan sampai 120 ID atau sesuai dengan kapasitas penyimpanan modul fingerprint ZFM-20. Tetapi karena yang dipakai dalam tugas akhir ini berjumlah 8 ID maka proses hapus ID sidik jari disesuaikan dengan jumlah dipakai. Indikator hapus id ketika selesai ditunjukan pada Gambar 4.8. :
Gambar 4.8 Proses Hapus Sidik Jari
tersebut untuk dilakukan penyimpanan. Proses hapus sidik jari selesai ditandai
dengan indikator “Proses Selesai”.
4.2.2 Pengujian Penyimpanan dan Pengambilan Senjata
Setelah pengujian pendaftaran dan proses hapus sidik jari berhasil, selanjutnya adalah melakukan pengujian terhadap proses penyimpanan dan pengambilan senjata. Pengujian dilakukan dengan cara mengisi semua kotak penyimpanan senjata sampai penuh dan mengosongkan kembali kotak penyimpanan sampai kosong. Selain itu pengujian dilakukan terhadap status kotak penyimpanan yang akan ditampilkan oleh LCD 16x4. Tampilan awal LCD ketika belum melakukan proses penyimpanan atau pengambilan senjata ditunjukan di Gambar 4.9. Tampilan tersebut menampilkan berapa jumlah kotak kosong yang belum terisi senjata, dan jumlah tersebut akan berubah tergantung proses penyimpanan atau pengambilan senjata.
Gambar 4.9 Tampilan Awal Status Loker dan Posisi Awal Kotak Pembawa
ditekan indikator pertama yang muncul di LCD adalah menyuruh untuk melakukan scanning ID operator seperti yang ditunjukan pada Gambar 4.10. Ketika sidik jari sudah terverifikasi bahwa data ID tersebut terdapat di database maka akan tampil indikator untuk melakukan scanning ID prajurit seperti ditunjukan pada Gambar 4.11, untuk proses penyimpanan terlebih dahulu harus menyimpan senjata sebelum menekan tombol in.
Gambar 4.10 Scan ID Operator
Gambar 4.11 Scan ID Prajurit
Tabel 4.6 Proses Penyimpanan dan Pengambilan Senjata
Penempatan Kotak Indikator Ketika Proses Jumlah Loker Tersisa
Setelah Proses
akan tampil peringatan di LCD yaitu “ LOKER PENUH! “. Begitupun juga ketika
proses pengambilan senjata dilakukan ketika loker dalam keadaan kosong atau
tidak ada senjata yang disimpan, maka akan tampil peringatan di LCD “ LOKER KOSONG! “ seperti yang ditunjukan pada Gambar 4.13.
Gambar 4.12 Indikator Proses Penyimpanan dan Pengambilan Selesai
Gambar 4.13 Peringatan Loker Penuh dan Loker Kosong
Tabel 4.7 Uji Keberhasilan Pemindahan Senjata
Percobaan Ke-
Penyimpanan Senjata Loker 1 Loker 2
Loker 0 Loker 3 Penyimpanan
1 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
2 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
3 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
4 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
5 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
6 Berhasil Berhasil Berhasil Berhasil Berhasil Tidak
Berhasil
7 Berhasil Berhasil Berhasil Berhasil Berhasil Berhasil
8 Berhasil Berhasil Berhasil Tidak
Berhasil Berhasil Berhasil
9 Berhasil Tidak
Berhasil Berhasil
Tidak
Berhasil Berhasil Berhasil
10 Berhasil Tidak
Berhasil Berhasil Berhasil Berhasil Berhasil
Gambar 4.14 Penyimpanan dan Pengambilan Senjata Berhasil
Gambar 4.15 Contoh Penyimpanan dan Pengambilan Senjata Tidak Berhasil
loker 3, mekanik untuk gerakan horizontal terjadi gesekan sehingga berhenti sebelum penempatan posisi. Sedangakan untuk pengujian keberhasilan proses pengambilan terhadap loker 1 dan 2, untuk loker 1 proses pengambilan berhasil dalam 7 kali percobaan dan 2 kali percobaan tidak berhasil. Untuk loker 2, proses pengambilan dalam 9 kali percobaan berhasil dan 1 kali percobaan tidak berhasil. Hal ini bisa terjadi karena input tekanan angin DCV yang kurang saat pengujian. Sehingga saat proses mendorong, kotak senjata tidak berpindah. Sebab lainnya adalah mekanik gerakan horizontal yang terkadang bergeser ketika dioperasikan secara terus menerus sehingga posisi kotak pembawa tidak sejajar dengan kotak penyimpan. Pada akhirnya kotak senjata berpindah tapi tidak seluruh bagian.
4.2.3 Pengujian History Senjata
Gambar 4.16 Scanning Jempol Kiri ( ID 0 ) Sebagai ID Operator
Tabel 4.8 Hasil Pengujian History
Gambar 4.17 Hasil Pengujian history Senjata
79
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pengujian terhadap keseluruhan alat, maka dapat diambil beberapa kesimpulan sebagai berikut :
1. Proses penyimpanan senjata yang paling banyak penyimpangannya adalah loker 3 karena dalam 10 kali percobaan, 2 kali percobaan tidak berhasil. Walaupun jarak dari posisi awal kotak pembawa ke loker 3 tidak sejauh loker 0 atau 1. Tetapi dikarenakan pembuatan mekanik untuk gerakan horizontal kurang rapi sehingga pergerakannya sering berhenti sebelum tepat sampai di depan loker yang dituju.
2. Proses pengambilan senjata yang paling banyak penyimpangannya adalah loker 2 karena dalam 10 kali percobaan, 2 kali percobaan tidak berhasil. Faktor kontruksi mekanik yang kurang rapi menjadi hal paling berpengaruh dalam keberhasilan proses pengambilan atau penyimpanan senjata.
5.2 Saran
PENDEK
SKRIPSI
Laporan Ini Disusun Untuk Memenuhi Salah Satu Syarat Kelulusan Menempuh Pendidikan Program Sarjana Program Studi Teknik Elektro
Disusun Oleh :
TAUFIK MUHARROM 1.31.11.021
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
vi
1.2 Identifikasi Masalah ... 3
1.3 Rumusan Masalah ... 4
1.4 Tujuan ... 4
1.5 Batasan Masalah ... 5
1.6 Metode Penelitian ... 5
1.7 Sistematika Penulisan Laporan ... 6
BAB II LANDASAN TEORI ... 8
2.1 Microcontroller ... 8
2.1.1 ArduinoIDE ( Integrated Development Environment ) ... 11
2.1.2 Bahasa Pemograman Arduino ... 12
vii
3.1 Perancangan Sistem ... 39
3.2 Bagian Input ... 41
viii
BAB IV PENGUJIAN DAN ANALISA ... 57
4.1 Pengujian Komponen ... 57
4.1.1 Pengujian Modul Fingerprint ZFM-20 ... 57
4.1.2 Pengujian Modul RTC DS3231 ... 60
4.1.3 Pengujian Rangkaian Driver Motor untuk Sistem Mekanik... 61
4.1.4 Pengujian Limit Switch untuk Pergerakan Motor Power Window ... 63
4.1.5 Pengujian Directional Control Valve dan Piston ... 64
4.1.6 Pengujian LCD 16x4 ... 66
4.2 Pengujian Alat ... 67
4.2.1 Pengujian Pendaftaran dan Proses Hapus Sidik Jari... 67
4.2.2 Pengujian Penyimpanan dan Pengambilan Senjata ... 70
4.2.3 Pengujian History Senjata ... 76
BAB V KESIMPULAN DAN SARAN ... 79
5.1 Kesimpulan ... 79
5.2 Saran ... 80
DAFTAR PUSTAKA ... 81
81
[1] Kadir, Abdul(2012) Panduan Praktis Mempelajari Aplikasi Mikrokontroler dan Pemogramannya menggunakan Arduino ,Penerbit Andi, Yogyakarta
[2] Syahrul(2014) Pemograman Mikrokontroller AVR Bahasa Assembly dan C,Informatika Bandung
[3] Muchlas, Nuryono Satya Widodo dan Wisnu Wulur (2014) Karakteristik Sistem Kendali On-Off Suhu Cairan Berbasis Mikrokontroler AT90S8535, Universitas Ahmad Dahlan, Yogyakarta
[4] Henawan, Heri (2009) Perancangan Elemen Mesin, Alfabeta, Bandung
[5] R. Oroh , Joyner (2014) Rancang Bangun Sistem Keamanan Motor Dengan Pengenalan Sidik Jari, Universitas Sam Ratulangi , Manado
[6] Overa, Tri Ari (2014) Bab 2 Landasan Teori, Universitas Komputer Indonesia, Bandung
[7] _____(2011) Modul Pneumatik dan Elektropneumatik, Politeknik Manufaktur, Bandung
[8] _____(2008) Specification Of LCD Module, XIAMEN AMOTEC DISPLAY CO.,LTD China
[9] http://www.circuitstoday.com/basics-of-microcontrollers (25 Desember 2014 21:51)
[10] _____(2008) ZFM-20 Series Fingerprint Identification Module, Hangzhou Zhian Technologies Co., Ltd, China
[11] http://arduino.cc/en/Main/Products (25 Desember 2014 22:00)
[12] http://www.made-in-china.com/showroom/nbhengte/productdetailIGnJHmx VdRYf/China-Power-Window-Motor-HT400-12-.html (4 januari 2015 21:45) [13] http://elektronika-dasar.web.id/teori-elektronika/motor-servo/ (4 januari 2015 21:11)
[14] http://elektronika-dasar.web.id/teori-elektronika/motor-stepper/ (4 januari 2015 21:36)
[16] http://zonaelektro.net/sensor/sensor/ (7 Januari 2015 01:06)
[17] http://elektronika-dasar.web.id/limit-switch-dan-saklar-push-on/ ( 23 Januari 2016 )
[18] http://www.centralelectro.com/catalog.php?action=show_custom&id=2453 &cat =59 (29 Juni 2015 08:05)
[19] http://www.pindad.com/weapon (1 April 2015 21:44)
[20] http://www.abi-blog.com/2014/03/silinder-pneumatic-pneumatic-cylinder .html (30 April 2015 17:30)
[21] http://www.tempo.co/read/news/2012/05/08/064402307/3-Tahun-152-Kasus -Penyalahgunaan-Senjata-Api (20 Februari 2015 21:31)
[22] http://www.republika.co.id/berita/nasional/umum/14/12/23/nh191ependuduk -miskin-di-2015-diprediksi-3025-juta-jiwa (20 Februari 2015 21:36)
[23] http://nasional.sindonews.com/read/662862/14/senpi-produksi-pt-pindad- hilang-1344000915 (1 April 2015 21:32)
[24] http://www.lensaindonesia.com/2014/09/29/oknum-brimob-curi-empat-senpi -polri-dari-gudang.html (2 Juli 2015 08:00)
iv
KATA PENGANTAR
Puji dan syukur penulis panjatkan ke hadirat Allah SWT karena atas limpahan rahmat dan karunia-Nya penulis dapat menyelesaikan laporan tugas akhir ini. Shalawat serta salam senantiasa tercurah kepada junjungan Nabi besar Muhammad SAW dan para sahabatnya.
Laporan tugas akhir ini berjudul “ Rancang Bangun Robot Manipulator untuk Sistem Penyimpan dan Pengambil Senjata Api Laras Pendek ”. Laporan ini ditujukan untuk memenuhi salah satu syarat syarat kelulusan menempuh pendidikan program Sarjana di Jurusan Teknik Elektro.
Pada kesempatan ini penulis mengucapakan terima kasih banyak kepada semua pihak yang telah membantu dalam memberikan bimbingan, petunjuk, nasehat-nasehat, dan juga dorongan penulis sampai selesainya tugas akhir ini. Untuk itu penulis mengucapkan terima kasih yang tak terhingga kepada :
1. Bapak Dr. Ir. Eddy Suryanto Soegoto, M. Sc., selaku Rektor Universitas Komputer Indonesia, Bandung.
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M. Sc., selaku Dekan Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung. 3. Bapak Muhammad Aria, M.T., selaku Ketua Jurusan Program Studi Teknik
Elektro Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung.
v
5. Bapak Budi Herdiana, M.T., selaku Dosen Pembimbing yang selalu memberikan arahan, ilmu, ide dan motivasinya kepada penulis selama pembuatan alat dan penulisan laporan tugas akhir ini.
6. Bapak Rodi Hartono, M.T., selaku Dosen Wali Teknik Elektro 2011 yang selalu memberikan nasehat dan motivasi serta membantun Teknik Elektro angkatan 2011 untuk lulus dari unikom.
7. Seluruh dosen teknik elektro yang telah memberikan ilmu dan bimbingannya selama kuliah di unikom.
8. Keluarga penulis, yang selalu memberikan doa dan motivasi mereka kepada penulis.
9. Rekan mahasiswa selaku teman-teman penulis yang selama ini seringkali berbagi pengalaman mereka, memberikan ide, ilmu dan motivasinya, serta berbagai pihak lain yang tidak bisa disebutkan satu persatu.
Bandung,_______________ Penulis,
![Tabel 2.12 Data Karakter LCD [2]](https://thumb-ap.123doks.com/thumbv2/123dok/618807.74449/30.595.125.501.190.654/tabel-data-karakter-lcd.webp)
![Tabel 2.13. Jenis-jenis Directional Contol Valve [7]](https://thumb-ap.123doks.com/thumbv2/123dok/618807.74449/34.595.125.502.106.546/tabel-jenis-jenis-directional-contol-valve.webp)
![Gambar 2.21. Single Acting Cylinder [20]](https://thumb-ap.123doks.com/thumbv2/123dok/618807.74449/35.595.220.406.365.475/gambar-single-acting-cylinder.webp)
![Gambar 2.23 Kerja Kendali On-Off dengan Dead Band [3]](https://thumb-ap.123doks.com/thumbv2/123dok/618807.74449/36.595.216.413.169.280/gambar-kerja-kendali-on-off-dengan-dead-band.webp)

![Tabel 3.2 Perbandingan Modul Arduino [11]](https://thumb-ap.123doks.com/thumbv2/123dok/618807.74449/45.595.102.537.263.503/tabel-perbandingan-modul-arduino.webp)
