ALAT MONITORING JARAK MOBIL TERHADAP PENGHALANG
PADA PARKIR MUNDUR BERBASIS MIKROKONTROLER
ATMega16 DAN BUZZER
TUGAS AKHIR
Diajukan untuk melengkapi dan memenuhi syarat memperoleh Ahli
Madya
DIAN HERMAYA
112411031
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
PERSETUJUAN
Judul : ALAT MONITORING JARAK MOBIL TERHADAP PENGHALANG PADA PARKIR MUNDUR BERBASIS MIKROKONTROLER ATMega16 DAN BUZZER Kategori : TUGAS AKHIR
Nama : DIAN HERMAYA No.Induk Mahasiswa : 112411031
Program Studi : D3 METROLOGI DAN INSTRUMENTASI Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Juli 2014
Diketahui/Disetujui Oleh
Ketua Program Studi D3 Metrologi Pembimbing dan Instrumentasi
PERNYATAAN
ALAT MONITORING JARAK MOBIL TERHADAP PENGHALANG
PADA PARKIR MUNDUR BERBASIS MIKROKONTROLER
ATMega16 DAN BUZZER
TUGAS AKHIR
Saya mengakui bahwa laporan Tugas Akhir ini adalah hasil kerja saya sendiri,
kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan
sumbernya.
Medan, Juli 2014
DIAN HERMAYA
PENGHARGAAN
Alhamdulillahirobbil’alamin,
Segala puji dan syukur bagi Allah Subhanahuwata’ala yang telah melimpahkan barokah, rahmat, hidayah-Nya dan menganugerahkan kemudahan serta kelancaran sehingga penulis dapat menyelesaikan Laporan Tugas Akhir ini sesuai waktu yang telah ditetapkan. Sholawat dan salam semoga senantiasa tercurahkan kepada Rasulullah Sallallahu’alaihiwassalam sang pembawa petunjuk dan selalu menjadi inspirasi dan teladan bagi penulis, serta doa dan bimbingan selalu dari kedua Orang Tua tercinta yang telah diberikan kepada penulis selama dalam penyusunan Laporan Tugas Akhir ini hingga selesai. Laporan Tugas Akhir ini merupakan slah satu syarat yang harus di penuhi untuk menyelesaikan pendidikan D3 pada Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam (FMIPA).
Penulis menyadari bahwa tersusunnya Tugas Akhir ini juga di bantu dari Do’a, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Dr.Sutarman,Msc selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan alam Universitas Sumatera Utara.
2. Ibu Dr. Diana A. Barus, M.Sc, selaku Ketua Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
3. Ibu Dra,Ratna Askiah Simatupang,M.Si selaku Sekretaris Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam. 4. Bapak Drs. Syahrul Humaidi, M.Si selaku dosen pembimbing penulis, yang dengan
penuh kesabaran telah membimbing dan membantu penulis dalam meyelesaikan tugas akhir ini.
5. Seluruh Dosen dan Karyawan Program Studi D3 Metrologi dan Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universita Sumatera Utara yang telah membantu penulis dalam menyelsaikan tugas akhir ini.
bersifat membangun dalam penyempurnaan Tugas Projek ini. Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin.
Medan, Juni 2014 Hormat Kami,
ABSTRAK
DAFTAR ISI
PERSETUJUAN i
PERNYATAAN ii
PENGHARGAAN iii
ABSTRAK v
DAFTAR ISI vi
DAFTAR TABEL viii
DAFTAR GAMBAR ix
BAB I PENDAHULUAN 1
1.1. Latar Belakang Masalah 1
1.2. Batasan Masalah 2
1.3. Tujuan Penulisan 2
1.4. Manfaat Penulisan 2
1.5. Sistematika Penulisan 2
BAB II LANDASAN TEORI 4
2.1. Pengertian Umum Tentang Jarak 4
2.2. Sensor Jarak HC-SR04 5
2.3. Mikrokontroler ATMega16 6
2.4. Konfigurasi PIN ATMega16 8
2.5. Liquid Cristas Display (LCD) 10
2.6. Buzzer 11
BAB III PERANCANGAN DAN SISTEM KERJA RANGKAIAN 12
3.1. Diagram Blok Rangkaian 12
3.2. Rangkaian Power Supply 13
3.3. Rangkaian Sistem Minimum Mikrokontroler ATMega16 14
3.7. Flowchart 18
BAB IV PENGUJIAN DAN ANALISA PROGRAM 20
4.1. Pengujian Rangkaian Mikrokontroler ATMega16 20
4.2. Pengujian Rangkaian Power Supply 20
4.3. Pengujian Rangkaian Sensor dan Buzzer 21
4.4. Pengujian Rangkaian Penampil LCD 21
4.5. Pengujian Mengenai Perbandingan Jarak Yang Diukur Sensor Terhadap 22 Jarak Sebenarnya.
BAB V KESIMPULAN DAN SARAN 24
5.1. Kesimpulan 24
5.2. Saran 24
DAFTAR PUSTAKA 25
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.1. Sensor Jarak HC-SR04 5
Gambar 2.2. Diagram Blok ATMega16 8
Gambar 2.3. Konfiguasi Pin ATMega16 9
Gambar 2.4. Liquid Crystal Display (LCD) 10
Gambar 2.5. Buzzer 11
Gambar 3.1. Diagram Blok Rangkaian 12
Gambar 3.2. Rangkaian Power Supply 13
Gambar 3.3. Rangkaian Sistem Minimum Mikrokontroler ATMega16 14
Gambar 3.4. Rangkaiann Sensor 15
Gambar 3.5. Rangkaian Buzzer 16
Gambar 3.6. Rangakain LCD 17
Gambar 3.7. Peta Memory LCD 17
ABSTRAK
BAB I
PENDAHULUAN
1.1.
Latar Belakang Masalah
Parkir merupakan kegiatan yang rutin dilakukan oleh setiap pengendara mobil. Kebutuhan akan parkir mobil menjadi semakin sulit seiring meningkatnya jumlah kendaraan dan semakin sempitnya lahan, terkadang seorang pengendara merasa kesulitan menghadapi situasi seperti ini. Bagi sebagian orang parkir mundur baik itu secara lurus, horizontal ataupun vertikal merupakan suatu pekerjaan yang sulit dilakukan. Tanpa dibantu oleh tukang parkir atau orang lain maka seorang pengemudi dapat menghabiskan waktu yang tidak sedikit untuk memarkirkan mobilnya, dikarenakan beberapa orang sulit untuk melihat atau menavigasi mobilnya dengan bantuan spion. Semakin pesatnya perkembangan teknologi, khusunya teknologi sistem keamanan dan kenyamanan yang diaplikasikan pada mobil telah membawa dampak positif. Salah satunya adalah alat ukur monitoring parkir mobil mundur yang diaplikasikan pada mobil untuk membantu pengendara melihat parkir mundur dengan peringatan dini ketika mobil bergerak.
Penelitian ini bertujuan untuk membuat sistem yang dapat mempermudah pengemudi dalam memarkir kendaraan dengan mengetahui jarak bagian belakang body mobil terhadap suatu benda atau penghalang menggunakan sensor jarak HC-SR04 saat mobil berada dalam posisi parkir mundur. Sensor ini mampu mendeteksi adanya penghalang dibelakang mobil dan mengirim output yang berupa jarak ke modul display sehingga dapat diketahui jarak antara penghalang dengan mobil agar benturan dapat dihindari.
1.2.
Batasan Masalah
2. Sensor yang digunakan pada alat monitoring parkir mobil pada saat parkir mundur ini yaitu sensor jarak HC-SR04
3. Hanya membahas indikator output sebagai buzzer.
4. Pada penelitian ini kasus yang di bahas hanya menenai pengukuran jarak monitoring mobil terhadap suatu benda atau penghalang pada saat mobil parkir mundur dan jarak hasil pengukuran di tampilkan pada display LCD.
1.3.
Tujuan Penulisan
Adapun tujuan yang ingin di capai dalam pembuatan alat tugas akhir ini adalah : 1. Membuat sistem yang dapat mempermudah pengemudi dalam memarkir
kendaraan dengan mengetahui jarak bagian belakang body mobil terhadap suatu benda atau penghalang menggunakan sensor jarak HC-SR04 saat mobil berada dalam posisi parkir mundur.
2. Melakukan pengujian dan analisis terhadap rangkaian yang dirancang.
1.4.
Manfaat Penulisan
Manfaat penelitian rancangan alat ini ialah untuk membantu para pengemudi mobil dalam memonitoring jarak body mobil bagian belakang terhadap suatu benda atau penghalang pada saat mobil parkir mundur.
1.5.
Sistematika Penulisan
Untuk mempermudah dalam pembahasan dan pemahaman dalam Laporan
BAB I PENDAHULUAN : Bab ini berisikan latar belakang, rumusan masalah, tujuan penulisan, batasan masalah, dan sistematika penulisan
BAB II LANDASAN TEORI : Bab ini berisikan teori pendukung dalam pembuatan alat ukur jarak monitoring mobil terhadap suatu benda atau penghalang pada saat parkir mundur berbasis mikrokontroler ATMega16.
BAB III PERANCANGAN SISTEM : Pada bab ini berisikan tentang perencanaan dan pembuatan system secara keseluruhan.
BAB IV PENGUJIAN RANGKAIAN : Pada bab ini, berisikan tentang hasil pengujian pada rangkaian.
BAB II
LANDASAN TEORI
2.1.
Pengertian Umum Tentang Jarak
Jarak adalah angka yang menunjukkan seberapa jauh suatu benda berubah posisi melalui suatu lintasan tertentu. Dalam estimasi jarak fisik dari dua buah posisi berdasarkan kriteria tertentu (misalnya jarak tempuh antara Jakarta-Bandung). Dalam bida tertentu. Berbeda dengan merupakan besaran ditempuh oleh kendaraan (biasanya ditunjukkan dalam odometer), orang, atau obyek, haruslah dibedakan dengan jarak antara titik satu dengan lainnya.
Jarak dan perpindahan mempunyai definisi yang berbeda. Perpindahan adalah perubahan posisi suatu benda. Perpindahan merupakan besaran vektor, besaran fisika yang mempunyai besar dan arah. Arah perpindahan dapat dinyatakan dengan arah mata angin (utara, timur, selatan, barat dll) atau menggunakan kata ke kiri, ke kanan, ke atas atau ke bawah. Selanjutnya dalam fisika, percepatan adalah perubahan kecepatan dalam satuan waktu tertentu. Umumnya, percepatan dilihat sebagai gerakan suatu obyek yang semakin cepat ataupun lambat. Namun percepatan adalah besaran vektor, sehingga percepatan memiliki besaran dan arah. Dengan kata lain, obyek yang membelok (misalnya mobil yang sedang menikung)-pun memiliki percepatan juga. Satuan SI percepatan adalah m/s2. Kecepatan ada besaran vektor yang menunjukkan seberapa cepat benda berpindah. Besar dari vektor ini disebut dengan kelajuan dan dinyatakan dalam satuan meter per sekon (m/s atau ms-1). Kelajuan adalah perbandingan antara jarak yang ditempuh benda/kendaraan dengan waktu yang ditempuh benda/kendaraan. Satuan kelajuan adalah km/jam atau m/s. Namun dalam perancangan alat ukur monitoring jarak mobil terhadap benda saat parkir mundur ini antara jarak,
perpindahan, kecepatan, dan kelajuan saling berkaitan.
HC-SR04 berfungsi sebagai sensor jarak dengan metode gelombang ultrasonic dan 2 buah transducer. Dari 2 buah transducer ini, salah satu berfungsi sebagai transmitter dan satu lagi sebagai receiver. Ada juga modul yang hanya mempunyai 1 buah transducer, berfungsi sebagai transmitter dan receiver sekaligus. Ultrasonic modul ini bekerja dengan cara menghasilkan gelombang suara pada frekuensi tinggi, yang kemudian dipancarkan oleh bagian transmitter. Pantulan gelombang suara yang mengenai benda didepannya akan ditangkap oleh bagian receiver. Dengan mengetahui lamanya waktu antara dipancarkannya gelombang suara sampai ditangkap kembali, kita dapat menghitung jarak benda yang ada didepan modul tersebut. Kita mengetahui kecepatan suara adalah 340m/detik. Lamanya waktu tempuh gelombang suara dikalikan kecepatan suara, kemudian dibagi 2 akan menghasilkan jarak antara ultrasonic modul dengan benda didepannya.
HC-SR04 memiliki 4 pin yaitu VCC, TRIG, ECHO dan GND. Ada juga modul yang pin TRIG dan ECHO-nya digabung menjadi satu dan pemakaiannya berganti-ganti.
Gambar 2.1. Sensor Jarak Ultrasonic HC-SR04
2.3.
Mikrokontroler ATMega16
Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR. AVR adalah mikrokontroler RISC (Reduce Instuction SetCompute) 8 bit berdasarkan arsitektur Harvard. Secara umum mikrokontroler AVR dapat dikelompokkan menjadi 3 kelompok, yaitu keluarga AT90Sxx, ATMega dan ATtiny. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fiturnya.
Mikrokontroler yang digunakan dalam pembuatan alat ukur monitoring jarak mobil terhadap suatu benda atau penghalang pada saat parkir mundur ini ialah Mikrokontroler ATMega16. Seperti mikroprosesor pada umumnya, secara internal mikrokontrolerATMega16 terdiri atas unit-unit fungsionalnya Arithmetic and Logical Unit (ALU), himpunan register kerja, register dan dekoder instruksi, dan pewaktubeserta komponen kendali lainnya. Secara garis besar mikrokontroler ATMega16 terdiri dari :
1. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16Mhz. 2. Saluran I/O 32 buah, yaitu Port A, Port B, Port C, dan Port D.
3. Memiliki kapasitas flash memori 16Kbyte, EEPROM 512 Byte, dan SRAM 1Kbyte
4. CPU yang terdiri dari 32 buah register. 5. User interupsi internal dan eksternal
6. Port antarmuka SPI dan Port USART sebagai komunikasi serial 7. Konsumsi daya rendah (DC 5V)
8. Fitur Peripheral yang terdiri dari :
- Dua buah 8-bit timer/counter dengan prescaler terpisah dan mode compare
- 8 kanal, 10 bit ADC
- Byte-oriented Two-wire Serial Interface - Watchdog timer dengan osilator internal - Antarm uka SPI
- On-chip Analog Comparator
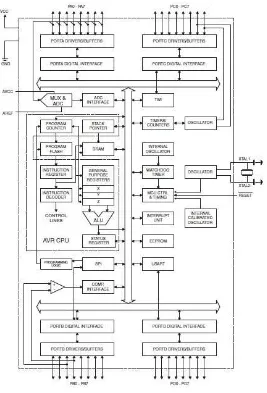
Selanjutnya untuk blok diagram ATMega16 dapat di lihat pada gambar berikut :
Gambar 2.2. Diagram Blok ATMega16
2.4.
Konfigurasi PIN ATMega16
tersebut terbagi atas 4 bagian (Port) yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk keperluan rangkaian osilator, supply tegangan, reset, serta tegangan referensi untuk ADC.
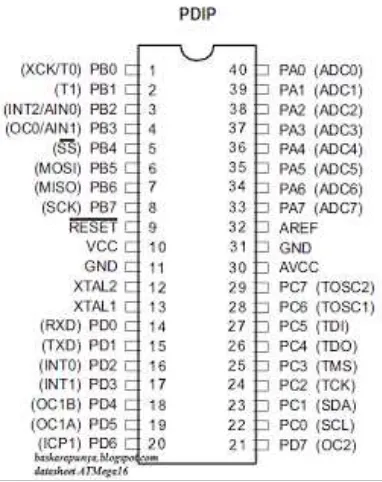
Susunan pin-pin pada mikrokontroler ATMega 16 dapat di lihat pada gambar berikut :
Gambar 2.3. Konfigurasi Pin ATMega16
Konfigurasi pin ATMega16 dengan kemasan 40 pin DIP (Dual In-line Package) dapat dilihat pada Gambar 2.2. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin ATMega16 sebagai berikut:
1. Vcc merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merupakan pin Ground
3. Port A (PA0…7) merupakan pin input/output dua arah dan pin masukan ADC. 4. Port B (PB0…7) merupakan pin input/output dua arah dan pin dengan fungsi khusus
6. Port D (PD0…7) merupakan pin input/output dua arah dan pin dengan fungsi khusus, seperti RXD, TXD, INT0, INT1, OC1B, OC1A, ICP1
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal
9. AVCC merupakan pin masukan tegangan untuk ADC 10.AREF merupakan pin masukan tegangan referensi ADC
2.5.
Liquid Crystal Display
(LCD)
2.6.
Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm). Pada rangkaian alat ukur monitoring jarak mobil terhadap suatu benda atau penghalang pada saat parkir mundur buzzer berfungsi sebagai suara peringatan yang memperingatkan pengendara mobil apabila jarak sensor telah mendekati suatu benda atau penghalang. Dengan demikian, pengemudi akan mengetahui jika posisi mobilnya dalam bahaya dan pengemudi bisa menghindari terjadinya benturan.
BAB III
PERANCANGAN DAN SISTEM KERJA RANGKAIAN
3.1.
Diagram Blok Rangkaian
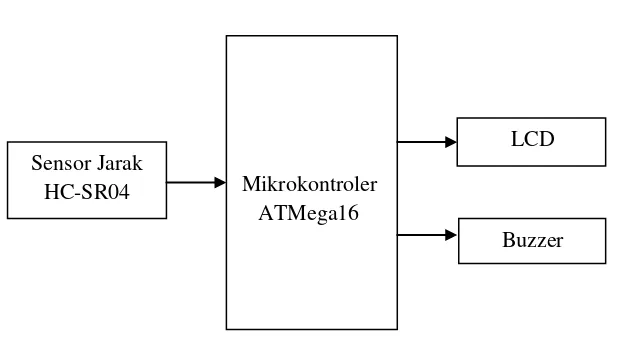
Gambar 3.1. Diagram Blok Rangkaian
Perancangan perangkat keras dalam sistem ini terdiri dari beberapa modul. Modul tersebut masing-masing memiliki fungsi yang saling berhubungan satu sama lainnya. Keterangan dari diagram blok di atas dapat dilihat sebagai berikut :
1. Sensor ultrasonic memancarkan sinyal yang digunakan untuk mengukur suatu jarak terhadap objek yang berada didepan sensor tersebut. Data yang diperoleh dari sensor ini selanjutnya dikirim ke mikrokontroler. Sensor jarak yang digunakan pada sistem ini memiliki jarak minimal pengukuran dari 3 cm sampai 300 cm.
2. Mikrokontroler berfungsi sebagai pusat kendali dari sistem ini. Didalam mikrokontroler terdapat program yang mengatur data dan mengumpulkan data yang dikirim oleh sensor jarak. Mikrokontroler mengatur kapan sinyal unltrasonic harus dipancarkan, menghitung nilai waktu dari saat gelombang mulai dipancarkan sampai diterima kembali, memproses data dari sensor ultrasonic kemudian ditampilkan ke LCD, dan memberikan peringatan melalui buzzer.
Sensor Jarak
HC-SR04 Mikrokontroler ATMega16
LCD
2. LCD (Liquid Crystal Display) berfungsi untuk menampilkan hasil data yang diproleh di mikrokontroler.
3. Buzzer berfungsi sebagai peringatan apabila sensor jarak sudah mendekati objek yang berada di depannya.
3.2.
Rangkaian Power Supply
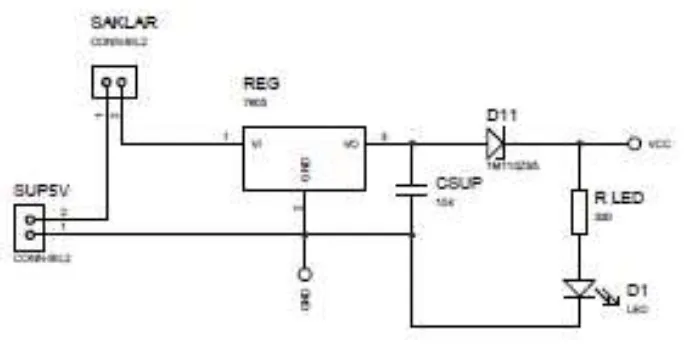
Gambar 3.2. Rangkaian Power Supply
Rangkaian power supply berfungsi mensuply arus ke seluruh rangkaian yang ada. Pada rangkaian power supply ini, rangkaian diregulasikan dengan regulator L7805 untuk mengatur agar keluaran tegangan yang dihasilkan agara tetap 5 volt walaupun terjadi perubahan pada tegangan masukkannya. Transistor PNP TIP 32 disini berfungsi untuk memasok arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805) tidak akan panas ketika rangkaian butuh arus yang cukup besar. LED hanya sebagai indikator apabila PSA dinyalakan.
Gambar 3.3. Rangkaian Sistem Minimum Mikrokontroler ATMega16
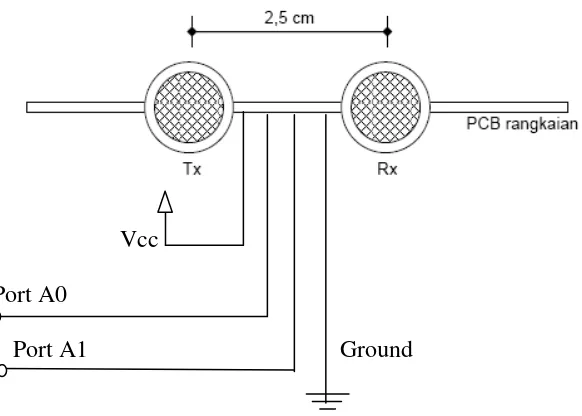
3.4.
Rangkaian Sensor HC-SR04
Vcc
Port A0Port A1
GroundGambar 3.4. Rangkaian Sensor Jarak HC-SR04
Pada sensor ultrasonic ada 2 rangkaian yang saling berhubungan yaitu Transmitter sebagai pengirim data dari objek ke benda dan Receiver sebagai penerima data dari benda ke objek. Jarak antara ultrasonic tranducer Rx dan Tx mempengaruhi kinerja alat dalam aplikasi ini. Pengaturan resistor variabel R6 pada rangkaian receiver dapat dilakukan saat rangkaian dinyalakan yaitu dengan acuan tampilan LCD. Bila LCD selalu menampilkan “Distance = 001 cm” berarti jendela komparator terlalu sempit sehingga dapat di-trigger oleh gelombang ultrasonic langsung dari Tx bukan pantulan dari benda di depannya. Proses pengukuran jarak dipicu dengan mengirimkan pulsa negatif (logika 0 / 0 V) selama 20 µs. Setelah perintah diterima dan dikenali, modul ultrasonic akan
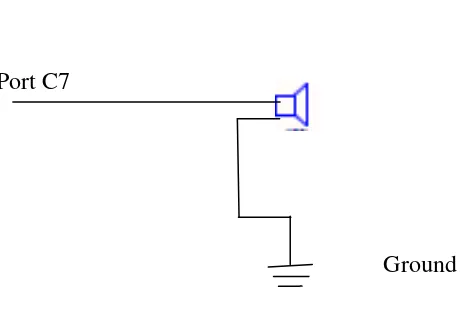
3.5.
Rangkaian Buzzer
Port C7
Ground
Gambar 3.5. Rangkaian BUzzer
Pada rangkaian ini, kaki positif buzzer dihubungkan ke pin 22 pada rangkaian mikrokontroler ATMega16, lalu bagian negative dihubungkan ke ground. Buzzer akan hidup jika mendapat tegangan sebesar 5 volt. Buzzer disini berfungsi sebagai indikator peringatan melalui indra pendengaran, untuk memberitahukan kepada pengguna apabila sensor telah mendekati objek
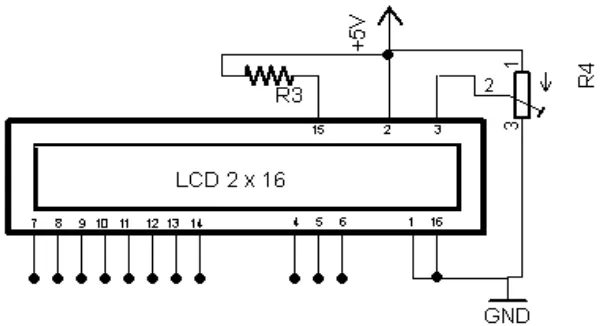
3.6.
Rangkaian LCD
Gambar 3.6. Rangkaian Skematik LCD
Pada rangkaian LCD, kaki-kaki LCD dihubungkan ke port B0 sampai B7 pada rangkaian sistem minimum Mikrokontroler ATMega16. Display LCD 2x16 berfungsi sebagai penampil nilai kecapatan refferensi dan kecepatan aktual yang dikirim dari mikrokontroler. LCD yang digunakan pada alat ini mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character 2x16, dengan 16 pin konektor. Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD itu sendiri. Pada peta memori dibawah, daerah yang berwarna biru (00 s/d 0F dan 40 s/d 4F) adalah display yang tampak. Jumlahnya sebanyak 16 karakter per baris dengan dua baris.
3.7.
Flowchart
Tidak
Ya
TidakYa
Tidak
YaGambar 3.8. Flowchart
Penjelasan Flowchart :1. Pada saat memulai, mikrokontroler menginisialisasi port-port yang akan digunakan untuk keperluan pembacaan sensor dan port untuk menampilkan ke LCD
2. Setelah menginisialisasi, sensor HC-SR04 mulai aktif mrngukur jarak 3. Apabila jarak yang diukur lebih kecil atau < = 30 cm maka buzzer akan
hidup satu kali untuk memberi peringatan. Mulai Inisialisasi Sensor <30 ? Sensor <20 ? Sensor <10 ?
Buzer Hidup 1 kali Sensor
Ultrasonik
Buzer Hidup 3 kali Buzzer Hidup 2
kali
4. Apabila jarak yang diukur lebih kecil atau < = 20 cm, maka buzzer akan hidup dua kali untuk memberi peringatan.
BAB IV
PENGUJIAN RANGKAIAN DAN ANALISA PROGRAM
4.1.
Pengujian Rangkaian Mikrokontroler ATMega16
Pengujian ini dilakukan agar rangkaian mikrokontroler ATMega16 dapat dikenali oleh program downloader. Dimana program yang digunakan adalah pemrograman dengan menggunakan bahasa C dan rangkaian mikrokontroler ini harus dapat diprogram langsung pada papan rangkaian. Pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega16A. Listing program yang digunakan dalam pengujian rangkaian ini ialah
#include <mega8535.h>
#include <delay.h>
#include <stdio.h>
while (1)
{
// Place your code here
PORTC=0x00;
Delay_ms(1000);
PORTC=0xFF;
Delay_ms(1000);
}
4.2.
Pengujian Rangkaian Power Supply
terhadap rangkaian atau tidak. Jika diukur, hasil dari +5,03 Volt. Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak murni. Selain itu, tegangan jala-jala listrik yang digunakan tidak stabil.
4.3.
Pengujian Rangkaian Sensor dan Buzzer
Untuk menguji rangkaian ini dilakukan dengan cara memberi suatu benda tepat didepan sensor, lalu benda tersebut di jauhkan dengan sensor sesuai jarak yang ditentukan. Dengan begitu, akan terlihat kemampuan sensor tersebut dalam mengukur jarak yang ada didepannya. Hasil pengukuran atau nilai yang berhasil dideteksi oleh sensor akan muncul dan menampil di LCD.
4.4.
Pengujian Rangkaian Penampil LCD
Pengujian ini dilakukan untuk mengetahui apakah LCD tersebut dapat menampilkan hasil pengukuran terhadap sensor jarak HC-SR04 sesuai dengan proses yang diinginkan atau tidak. Listing program pengetesan LCD ini ialah
LCD:
#include <mega8535.h>
#include <delay.h>
// Alphanumeric LCD Module functions
#asm
equ __lcd_port=0x12 ;PORTD //Port D berfungsisebagai output ke LCD
lcd_init(16)
lcd_gotoxy(0,0); // kolom 0 bariske 0
lcd_putsf("MIKROKONTROLLER "); //16 karaktertermasukspasi
lcd_gotoxy(0,1);
lcd_putsf(" 9537 "); //16 karaktertermasukspasi
Dengan program tersebut, LCD tersebut dapat berjalan dengan baik, dan menampilkan hasil pengukuran yang ditampilkan pada LCD tersebut.
4.5.
Pengujian Mengenai Perbandingan Jarak Yang Diukur Sensor
Terhadap Jarak Sebenarnya.
Pengujian pertama ini dilakukan untuk mencari error pada sensor jarak HC-SR04 yang terjadi dalam alat ini terhadap jarak yang sebenarnya. Percobaan dilakukan dengan cara memberi penghalang yang dihadapkan langsung dengan sensor jarak HC-SR04 dengan interval jarak 10,20,30 sampai 170 cm yang kemudian dibandingkan dengan nilai yang tertera pada LCD. Pada percobaan ini kondisi pengukuran yang dilakukan ialah sbb :
- Benda atau penghalang berbentuk persegi panjang ukuran 50 x 45 x 0,5 cm dengan permukaan datar.
- Benda atau penghalang digeser menjauhi sensor dengan interval 10, 20, 30 s/d 170 cm.
Tabel 4.1. Pengujian Pengukuran Jarak Oleh Sensor Terhadap Jarak Yang Sebenarnya Percobaan Jarak Sebenarnya (cm) Jarak Pada
LCD (cm) Error (cm)
% Error (cm)
1. 10 10 - -
2. 20 20 - -
3. 30 30 - -
4. 40 40 - -
5. 50 50 - -
6. 60 62 2 3,3
7. 70 70 - -
8. 80 80 - -
9. 90 89 -1 -1,1
10. 100 100 - -
BAB V
KESIMPULAN DAN SARAN
5.1.
KESIMPULAN
Dari Perancangan dan pengujian yang telah dilakukan pada alat tersebut dapat disimpulkan beberapa hal sebagai berikut :
1. Hasil pengukuran antara jarak sebenarnya dengan jarak yang diperoleh sensor jarak HC-SR04 berbeda sekitar 0-2 cm.
2. Nilai yang dihasilkan dari sensor ini dengan nilai sebenarnya dapat menggambarkan bahwa alat ukur ini memiliki keakurasian yang cukup tinggi dalam mengukur jarak, hanya terdapat % eror di bawah 5%.
3. Sistem ini dapat dikatakan cukup andal karena tingkat realibilitinya mencapai 95%
5.2.
Saran
1. Masih perlu pengembangan, penyempurnaan atau dengan pengkombinasian komponen yang lain, sehingga sistem kerja pada alat ini akan lebih baik lagi. 2. Dimasa yang akan datang, pengaplikasian alat ini bisa ditingkatkan lagi, sehingga
DAFTAR PUSTAKA
Agfianto Eko Putra, Teknik antar muka computer : konsep & aplikasi, Penerbit Graha Ilmu, Yogyakarta, 2002
Malvino, A.p. 1992. Prinsip-prinsip Elektronika. Jakarta : Erlangga.
“Pengukuran Dengan Sensor Jarak HC-SR04,” Diakses dari
“Mikrokontroler ATMega16,” Diakses dari
“Ultrasonic Range Sensor,” Diakses dari