TUGAS AKHIR
APLIKASI PEMANCAR DAN PENERIMA SENSOR
ULTRASONIK SR04 DALAM PENGKURAN JARAK
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat Memperoleh Ahli Madya
PRIMA AYUNI
112408005
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATRA UTARA
MEDAN
LEMBAR PERSETUJUAN
Judul : Aplikasi Pemancar Dan Penerima Sensor Ultrasonik
SR04 Dalam Pengukuran Jarak Kategori : Tugas Akhir
Nama : Prima Ayuni Nomor Induk Mahasiswa : 112408005 Program Studi : D-III Fisika Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatra Utara
Disetujui di Medan, Juli 2014
Disetujui Oleh
Ketua Program Studi D-III Fisika Pembimbing,
Dr. Susilawati.M.Si
LEMBAR PERNYATAAN
APLIKASI PEMANCAR DAN PENERIMA SENSOR ULTRASONIK SR04 DALAM PENGUKURAN JARAK
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2014
KATA PENGANTAR
Puji syukur penulis ucapkan kehadirat Allah SWT atas rahmat-Nya akhirnya Tugas Akhir dengan judul “Aplikasi Pemancar Dan Penerima Sensor Ultrasonik SR04 Dalam Pengkuran Jarak” dapat diselesaikan. Tugas Akhir ini merupakan satu persyaratan guna menyelesaikan Pendidikan Diploma Untuk meraih gelar Ahli Madya di Departemen Fisika Universitas Sumatera Utara.
Atas bantuan serta dorongan yang telah diberikan penulis mengucapkan terima kasih kepada Bapak Dr. Bisman Perangin-angin, M.Eng.Sc selaku dosen pembimbing yang dengan sabar membimbing dan memberikan arahan hingga terselesainya Tugas Akhir ini, dan juga kepada Ibu Dr. Susilawati, M.Si dan Bapak Dr. Perdinan Sinuhai, MS. selaku Ketua dan Sekretaris Program Studi D-III Fisika. Pada kesempatan ini penulis mengucapkan terima kasih kepada kedua orang tua tercinta atas didikan, nasehat dan doa selama ini kepada penulis, dan juga kepada rekan-rekan stambuk 2011 atas bantuannya.
Penulis mengharapkan koreksi dari pembaca yang sifatnya membangun kearah satu penyempurnaan. Akhir kata penulis mengucapkan terima kasih, semoga Tugas Akhir ini bermanfaat bagi kita semua.
Medan, Juli 2014 Penulis,
ABSTRAK
Telah dirancang pendeteksi jarak dekat, jauh dan cukup jauh yaitu Aplikasi Pemancar Dan Penerima Sensor Ultrasonik SR04 Dalam Pengukuran Jarak. Rangkaian ini dirancang dengan menggunakan mikrokontroler ATmega 8535 dan sensor ultrasonik tipe SR04 sebagai input untuk mendeteksi jarak. Sensor ini terdiri dari pemancar dan penerima gelombang ultrasonic. Rangkaian pemancar akan memancarkan gelombang ultrasonic dalam waktu 200 µs. gelombang ini melalui udara dengan kecepatan kurang lebih 344 m/det. Jika gelombang ini mengenai suatu objek, maka gelombang ini akan dipantulkan kembali ke penerima dari sensor ultrasonic. Metode yang digunakan ialah dengan memanfaatkan (Timer/Counter) yang sudah ada dalam mikrokontroler. Mikrokontroler ATmega 8535 memiliki kecepatan pembangkit frekuensi hingga 8MHz, kemampuan pencacah 8-bit,serta dengan menggunakan bahasa C sebagai bahasa pemrogramannya. Code Vision AVR merupakan salah satu perangkat lunak yang menggunakan bahasa C. Code Vision AVR dirancang dengan mempertimbangkan sifat- sifat pengkodean bahasa C sehingga program yang dihasilkan compiler bisa sekecil mungkin dan secepat mungkin. Hasil perancangan alat ini akan didapatkan pengukuran jarak benda dari sensor gelombang ultrasonic dengan mikrokontroler Atmega 8535.
DAFTAR ISI
Halaman
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv
DAFTAR TABEL ... vi
DAFTAR GAMBAR ... vii
BAB 1. PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 2
1.3. Tujuan Penulisan ... 2
1.4. Batasan Masalah ... 3
1.5. Manfaat Penulisan ... 3
1.6. Sistematika Penulisan ... 4
BAB 2. DASAR TEORI ... 5
2.1. Sensor Jarak Ultrasonik PING ... 5
2.1.1. Prinsip Kerja Sensor Ultrasonik ... 8
2.1.2.Pengaktifan Sensor Ultrasonik ... 9
2.1.3.Pemancar (Transmitter) Pada Sensor Ultrasonik ... 9
2.1.4.Penerima (Receiver) Pada Sensor Ultrasonik ... 13
2.1.5.Pengukur Jarak dengan UltraSonic ... 16
2.1.6.Transducer Sensor Ultrasonik ... 17
2.2.Mikrokontroller ATmega 8535 ... 18
2.2.1.Pengertian Mikrokontroler ... 18
2.2.2.Chip Mikrokontroller ATmega 8535 ... 20
2.2.3.Konfigurasi Pin ATmega 8535 ... 25
2.2.4.Port Masukan/Keluaran (Input/Output Port) ... 28
2.2.5.Konstruksi ATMega 8535 ... 30
2.3.2. Pengenal ... 34
2.3.3. Tipe Data ... 35
2.3.4. Konstanta Variabel ... 37
2.3.5. Komentar ... 38
2.4. Operator Bahasa C ... 38
2.4.1. Operator Aritmatika ... 38
2.4.2. Operator Pembanding ... 39
2.4.3. Operator Logika ... 40
2.4.4. Fungsi Pustaka ... 40
2.5. LCD (Liquid Crystal Display) ... 41
2.6. Regulator Tegangan ... 45
2.6.1. Regulator Tegangan DC (Direct Current) ... 48
2.6.2. Penyearah (Rectifier) ... 50
2.6.3. Penyearah Dua Fase ... 52
BAB 3. PERANCANGAN DAN PEMBUATAN ... 54
3.1. Rangkaian Perangkat Keras (Hardware) ... 54
3.1.1. Blok Diagram Rangkaian ... 54
3.1.2. Rangkaian Catu Daya ... 55
3.1.3. Rangkaian Minimal Mikrokontroler ATmega 8535 ... 56
3.1.4. Sensor Ultrasonik PING ... 58
3.1.5. Rangkaian Minimal Sensor Ultrasonik ... 60
3.1.6. Prinsip Kerja Pemancar Ultrasonik (Transmitter) ... 61
3.1.7. Prinsip Kerja Penerima Ultrasonik (Receiver) ... 63
3.1.8. Rangkaian Minimal LCD Display ... 66
3.1.9. Rangkaian Minimal Buzzer... 67
3.2. Rangkaian Lengkap Pendeteksi Jarak ... 69
BAB 4. PENGUJIAN DAN ANALISA ... 72
4.1. Pengujian Alat ... 72
4.1.1. Pengukuran Pin IC Mikrokontroller AT mega 8535... 73
4.1.2. Pengukuran Pin LCD ... 75
4.2. Pengukuran Waktu Pantul Sensor Ultrasonik ... 76
4.2.1. Tampilan Grafik Pengukuran Waktu Pantul Sensor Ultrasonik ... 77
4.2.2. Analisa Data ... 80
4.2.3. Ralat Rata – Rata Hasil Dari Analisa Data ... 80
BAB 5. KESIMPULAN DAN SARAN ... 82
5.1. Kesimpulan ... 82
5.2. Saran ... 82
DAFTAR TABEL
Tabel Judul Halaman
2.1. Perbandingan Kecepatan Mikrokontroler pada Beberapa Merek ... 22
2.2. Deskripsi Pin Mikrokontroler ATmega 8535 ... 25
2.3. Tipe Data ... 37
2.4. Operator Aritmatika ... 38
2.5. Operator Pembanding ... 39
2.6. Operator Logika ... 40
2.7. Operator Dasar LCD ... 43
2.8. Konfigurasi Pin LCD ... 45
2.9. Regulator Tegangan Tetap (DC) ... 50
2.10. Regulator Tegangan Tidak Tetap (AC)... 50
4.1. Hasil Pengukuran Pin IC Mikrokontroller ATmega 8535 ... 73
4.2. Hasil Pengukuran Pin LCD ... 75
4.3. Hasil Pengukuran Waktu Pantul Sensor Ultrasonik... 77
DAFTAR GAMBAR
Gambar Judul Halaman
2.1. Sensor Jarak Ultrasonik Ping ... 5
2.2. Diagram Waktu Sensor Ping ... 6
2.3. Jarak Ukur Sensor Ping ... 7
2.4. Ilustrasi Cara Kerja Sensor ... 8
2.5. Skematik Hubungan Pin ... 9
2.6. Rangkaian Pemancar Sensor Ultrasonik ... 11
2.7. Rangkaian Penerima Sensor Ultrasonik ... 14
2.8. Prinsip Echo Sounder ... 17
2.9. Transducer Ultrasonik ... 17
2.10. Kemasan Mikrokontroler ATmega 8535 ... 23
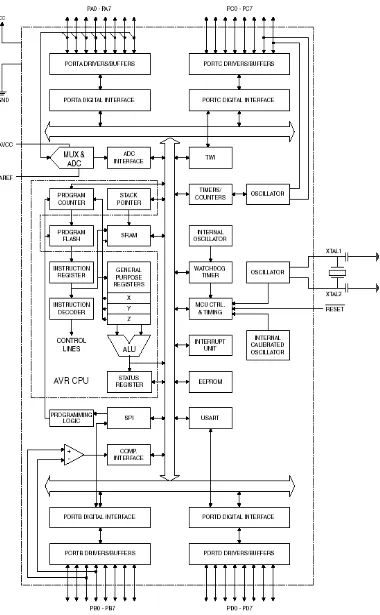
2.11. Blok Diagram Fungsional ATmega8535 ... 24
2.12. Konfigurasi IC Mikrokontroller ATmega 8535 ... 25
2.13. Konfigurasi Internal Pin Port ... 29
2.14. Register I/O Sebagai Memori Data Dan I/O Sebagai I/O ... 31
2.15. LCD Pendeteksi Jarak. ... 41
2.16. Konfigurasi Pin LCD ... 43
2.17. Regulator Tegangan ... 46
2.18. Rangkaian Penyearah Sederhana ... 51
2.19. Rangkaian Penyearah Gelombang Penuh ... 51
2.20. Rangkaian Penyearah Setengah Gelombang dengan filter C ... 52
2.21. Rangkaian Rectifier Dua-Fase ... 53
3.1. Blok Diagram Rangkaian ... 54
3.2. Rangkaian Catu Daya ... 55
3.3. Rangkaian Mikrokontroller ATmega 8535 ... 57
3.4. Prinsip kerja Sensor Ultrasonik ... 59
3.5. Prinsip Pemantulan Sensor Ultrasonik ... 59
3.6. Rangkaian Sensor Ultrasonik Ping... 60
3.7. Rangkaian Pemancar Sensor Ultrasonik ... 62
3.10. Rangkaian Buzzer ... 68
3.11. Rangkaian Lengkap Pendeteksi Jarak ... 69
3.12. Flowchart Program Pendeteksi Jarak ... 71
4.1. Rangkaian Skematik Mikrokontroller ATmega 8535 ... 72
4.2. Rangkaian Skematik LCD... 76
4.3. Grafik Jarak 10 cm ... 77
4.4. Grafik Jarak 30 cm ... 78
4.5. Grafik Jarak 60 cm ... 78
4.6. Grafik Jarak 90 cm ... 78
4.7. Grafik Jarak 120 cm ... 79
4.8. Grafik Jarak 150 cm ... 79
ABSTRAK
Telah dirancang pendeteksi jarak dekat, jauh dan cukup jauh yaitu Aplikasi Pemancar Dan Penerima Sensor Ultrasonik SR04 Dalam Pengukuran Jarak. Rangkaian ini dirancang dengan menggunakan mikrokontroler ATmega 8535 dan sensor ultrasonik tipe SR04 sebagai input untuk mendeteksi jarak. Sensor ini terdiri dari pemancar dan penerima gelombang ultrasonic. Rangkaian pemancar akan memancarkan gelombang ultrasonic dalam waktu 200 µs. gelombang ini melalui udara dengan kecepatan kurang lebih 344 m/det. Jika gelombang ini mengenai suatu objek, maka gelombang ini akan dipantulkan kembali ke penerima dari sensor ultrasonic. Metode yang digunakan ialah dengan memanfaatkan (Timer/Counter) yang sudah ada dalam mikrokontroler. Mikrokontroler ATmega 8535 memiliki kecepatan pembangkit frekuensi hingga 8MHz, kemampuan pencacah 8-bit,serta dengan menggunakan bahasa C sebagai bahasa pemrogramannya. Code Vision AVR merupakan salah satu perangkat lunak yang menggunakan bahasa C. Code Vision AVR dirancang dengan mempertimbangkan sifat- sifat pengkodean bahasa C sehingga program yang dihasilkan compiler bisa sekecil mungkin dan secepat mungkin. Hasil perancangan alat ini akan didapatkan pengukuran jarak benda dari sensor gelombang ultrasonic dengan mikrokontroler Atmega 8535.
BAB 1
PENDAHULUAN
1.1
Latar Belakang Masalah
Pengukuran merupakan hal yang penting dalam dunia ilmu pengetahuan. Pengukuran-pengukuran tersebut antara lain : pengukuran jarak dari satu tempat ke tempat lain, pengukuran waktu dari satu kejadian ke kejadian yang lainnya, pengukuran temperatur / suhu suatu daerah dan lain sebagainya. Untuk mengukur jarak dari suatu titik ke titik lainnya dapat digunakan mistar atau meteran. Dengan menggunakan mistar atau meteran, maka dapat ditentukan jarak antara satu titik ke titik lainnya. Seiring dengan perkembangan teknologi yang semakin canggih, khususnya dibidang elektronika analog dan digital, maka untuk mengukur jarak dari satu titik ke titik lainnya dapat digunakan sensor ultrasonik dan alat penghitung. Sensor ultrasonik ini menggunakan kecepatan suara untuk mengukur jarak. Kecepatan suara adalah 334 m/s, dengan demikian jika diketahui waktu antara pengiriman sinyal dan penerimaan sinyal, maka akan dapat dihitung jarak antara pemancar dan penerima.
Sensor Ultrasonik SR04 Dalam Pengukuran Jarak “
yang merupakan hasil inovasi yang dapat meringankan dan membantu manusia dalam bidang pekerjaan mendeteksi/mengukur jarak. Alat ini akan bekerja secara otomatis mendeteksi/mengukur jarak dengan menggunakan sensor ultrasonic.1.2. Rumusan Masalah
Permasalahan pada penulisan ini adalah bagaimana membuat suatu software menggunakan bahasa pemrograman C agar dapat mendeteksi jarak dekat, jauh dan sangat jauh pada sensor ultrasonic. Agar sensor dapat bekerja dengan baik maka dilakukan tahapan pengujian berikut ini:
1. Perancangan suatu sistem sensor jarak dengan jenis ultrasonik 2. Pengaktifan sensor ultrasonic menggunakan bahasa pemrograman C.
3. Pengujian sensor ultrasonik yang digunakan pada berbagai kondisi jarak dekat, Jauh dan cukup jauh.
1.3. Tujuan Penelitian
Adapun Tujuan dari penelitian tugas akhir ini sebagai berikut :
1. Membuat suatu alat pendeteksi jarak dengan menggunakan sensor ultrasonic 2. Melakukan pengujian terhadap sensor ultrasonic.
1.4. Batasan Masalah
Mengacu pada hal diatas, penulis membuat alat Aplikasi Pemancar Dan Penerima Sensor Ultrasonik SR04 Dalam Pengukuran Jarak dengan batasan-batasan sebagai berikut:
1. Mikrokontroler yang digunakan adalah mikrokontroler ATmega 8535. 2. Sensor yang digunakan untuk mendeteksi jarak adalah sensor ultrasonik. 3. Alat hanya mendeteksi jarak dekat, jauh dan cukup jauh.
1.5. Manfaat Penelitian
Laporan tugas akhir ini diharapkan bermanfaat bagi :
1. Dapat digunakan untuk mengukur jarak dekat, jarak jauh dan jarak cukup jauh.
2. Dapat mengaplikasikan sensor ultrasonic sebagai pendeteksi jarak antara sensor dengan sebuah objek.
3.
Dengan menggunakan sensor ultrasonik dapat mengukur jarak dengan secara otomatis.1.6. Sistematika Penulisan
Untuk memberikan gambaran pada mengenai tugas akhir ini, secara singkat dapat diuraikan sistematika penulisan sebagai berikut :
BAB 1
PENDAHULUAN
BAB 2
DASAR TEORI
Bab ini berisi tentang teori dasar yang digunakan sebagai bahan Acuan proyek tugas akhir, serta komponen yang perlu diketahui Untuk mempermudah dalam memahami sistem kerja alat ini.
BAB 3
PERANCANGAN DAN PEMBUATAN
Pada bagian ini akan dibahas perancangan dari alat, yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir dari program yang akan diisikan ke mikrokontroler ATmega 8535.
BAB 4
PENGUJIAN DAN ANALISA
Pada bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai program-program yang digunakan untuk mengaktifkan rangkaian, penjelasan mengenai program yang diisikan ke mikrokontroler ATmega 8535.
BAB 5
KESIMPULAN DAN SARAN
BAB 2
DASAR TEORI
2.1 Sensor Jarak Ultrasonik PING
Sensor jarak ultrasonik ping adalah sensor 40 khz produksi parallax yang banyak digunakan untuk aplikasi atau kontes robot cerdas. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal ( SIG ) selain jalur 5V dan ground. Perhatikan gambar dibawah ini :
Gambar 2.1 Sensor jarak ultrasonik ping
Sensor PING mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik ( 40 KHz ) selama t = 200 µs kemudian mendeteksi pantulannya. Sensor PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller pengendali ( pulsa trigger dengan tout min 2 µs ).
Spesifikasi sensor ini :
a. Kisaran pengukuran 3cm-3m.
d. Delay before next measurement 200 µs.
e. Burst indicator LED menampilkan aktifitas sensor.
Gambar 2.2 Diagram Waktu Sensor Ping
Sensor Ping mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonik (40 kHz) selama tBURST (200 μs) kemudian mendeteksi pantulannya. Sensor Ping memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroler pengendali (pulsa trigger dengan tOUT min. 2 μs).
Gelombang ultrasonik ini melalui udara dengan kecepatan 344 m/det, mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high
High (tIN) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan obyek. Maka jarak yang diukur adalah
S = (tIN x V ) ÷ 2 Dimana :
S = Jarak antara sensor ultrasonik dengan objek yang dideteksi V = Cepat rambat gelombang ultrasonik di udara (344 m/s)
tIN = Selisih waktu pemancaran dan penerimaan pantulan gelombang.
Gambar 2.3 Jarak Ukur Sensor Ping
2.1.1. Prinsip Kerja Sensor Ultrasonik
Seperti telah disebutkan bahwa sensor ultrasonik terdiri dari rangkaian pemancar ultrasonik yang disebut transmitter dan rangkaian penerima ultrasonik yang disebut receiver. Sinyal ultrasonik yang dibangkitkan akan dipancarkan dari transmitter ultrasonik.
Ketika sinyal mengenai benda penghalang, maka sinyal ini dipantulkan, dan diterima oleh receiver ultrasonik. Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap benda di depannya (bidang pantul).
Gambar 2.4. Ilustrasi Cara Kerja Sensor Prinsip kerja dari sensor ultrasonik adalah sebagai berikut:
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20 KHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40KHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
3. Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus : S = 340.t/2 dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
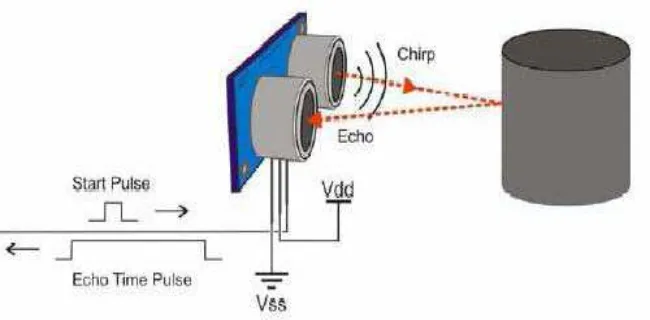
2.1.2. Pengaktifan Sensor Ultrasonik
Gambar 2.5 Skematik Hubungan Pin
Untuk pengaktifan sensor ultrasonik, hubungkan Pin Vss ke Ground, kemudian pin Vdd ke catu daya yang keluarannya sudah diset 5V, setelah baterai dihubungkan dengan IC Regulator 7805, selanjutnya Pin SIG dihubungkan ke pin pada Mikrokontroller, sebagai pengendali sistem mikrokontroler diprogram untuk membuat sensor pada PORT D yaitu pin D.0 dan pin D.1.
2.1.3. Pemancar (Transmitter) Pada Sensor Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1.Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3 KΩ untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor. 3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektor T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor.
ATMEGA 8535 Reset PA.3 PA.2 PC.5 PC.6 PC.3 PC.7 PC.0 PC.2 PC.4 37 38 VCC PB.0 GND 9 10 10 K 22 23 24 25 26 27 28 1 12 13 11 4 MHz 2 3 BATTERY 5V VR1 10K R1 4,7K R2 10K C1 680F C2 0,01µ 1 2 3 4 5 6 7 8 IC 555 D1 IN4148 D2 IN4148 T1 SL100 T2 SK100 R4 220Ω R5 220Ω R3 1K ULTRASONIC TRANSMITER TRANSDUCER GND Trigger Ouput Reset VCC Discharge Threshold Control
Gambar 2.6. Rangkaian Pemancar Sensor Ultrasonik
Rangkaian pemancar ultrasonik di atas adalah merupakan rangkaian pembangkit sinyal suara frekuensi tinggi dengan memanfaatkan multivibrator astable IC 555. Jadi sebenarnya untuk rangkaian pemancar ini kita bebas menggunakan rangkaian apa saja yang penting bisa membangkitkan frekuensi cukup tinggi. Kita bisa menggunakan rangkaian oscillator transistor, oscillator gerbang logika atau jenis oscillator lainnya, karena memang yang penting bisa menghasilkan sinyal yang berfrekuensi tinggi.
modulator dengan modulasi yang bisa dikatakan hampir sempurna, hanya saja memang IC555 ini tidak mampu berkerja dengan baik pada frekuensi yang sangat tinggi hingga MHz. Tapi untuk sinyal suara ultrasonic yang range frekuensinya hanya berkisar ribuan Hz, maka IC ini sangat bisa untuk diandalkan. Perhitungan frekuensinya juga sangat mudah dan akurat, sehingga anda bisa dengan mudah menentukan frekuensi dari pancaran suara ultrasonic yang anda perlukan. Untuk mengetahui rumus perhitungan frekuensi yang dihasilkan anda bisa membaca postingan saya tentang multivibrator astable di blog ini.
Prinsip kerja rangkaian pemancar ultrasonik diatas tidak ada bedanya dengan rangkaian astable 555, dimana nilai frekuensi yang dihasilkan ditentukan oleh nilai VR1, R1, R2 dan C1. Hanya saja dianggap sebagai pemancar gelombang ultrasonic dikarenakan sinyal frekuensi tinggi yang dihasilkan oleh rangkaian diubah kedalam bentuk gelombang suara dengan bantuan loudspeaker dan juga penambahan dua buah transistor pada jalur output hanya dimaksudkan sebagai driver loudspkear agar output IC555 tidak terbebani oleh impedansi loudspeaker yang sangat rendah. Sebagai catatan bahwa gelombang suara yang mempunyai range frekuensi diatas 20 KHz disebut dengan gelombang ultrasonik.
ini karena kebanyakan pendengaran binatang bisa mencapai frekuensi puluhan ribu hertz (ultrasonik) dibandingkan pendengaran manusia yang hanya maksimum 20 Khz.
2.1.4. Penerima (Receiver) Pada Sensor Ultrasonik
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan.
Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalah low (logika’0’). Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).
Prinsip kerja dari rangkaian penerima gelombang ultrasonik tersebut adalah sebagai berikut :
1. Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi 40 KHz melalui rangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
6. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya
ATMEGA 8535 Reset PA.3 PA.2 PC.5 PC.6 PC.3 PC.7 PC.0 PC.2 PC.4 37 38 VCC PB.0 GND 9 10 10 K 22 23 24 25 26 27 28 1 12 13 11 4 MHz 2 3 2 3 4 7 6 -+ IC2 CA3140 VR2 250K D4 IN4148 D3 IN4148 R13 10K R11 4,7K R8 15K R6 390K R10 10K R7 470K 12KR9
R12 15K R14 100K T3 BC548 T4 BC548 C3 0,22µF C4
0,1µF C5 560nF ULTRASONIC RECEIVER TRANDUCER R1 33Ω
Pada rangkaian sensor ultrasonik diatas juga sebenarnya mempunyai cara kerja yang cukup sederhana. Dimana tidak ada sistem modulasi atau pengiriman data yang diterapkan, rangkaian penerima ini hanya difungsikan untuk mengaktifkan relay pada saat adanya pancaran sinyal ultrasonic dari rangkaian pemancar. Beban yang akan anda saklarkan terserah kita, karena sudah berada diluar sistem rangkaian. Apakah ingin membunyikan Buzzer atau menghidupkan lampu semuanya terserah kita. Bahkan untuk beban yang memakai tegangan PLN 220 volt juga bisa.
Cara Kerja rangkaian di atas adalah :
1. Loudspeaker tweeter atau mikrofon digunakan sebagai penangkap gelombang suara ultrasonik.
2. Gelombang ultrasonik yang diterima kemudian diperkuat dengan menggunakan dua buah transistor.
3. Sebagai pemilih frekuensi digunakan kapasitor tapis C5 dengan nilai 560 nF, disamping itu juga dibantu oleh R14 (100 Kohm).
4. IC Op-Amp pada rangkaian penerima ini hanya dimaksudkan sebagai pembanding bukan sebagai penguat.
5. Sebagai referensi pembanding digunakan potensio VR2 yang membagi tegangan supply 9 volt menjadi dua bagian tegangan.
7. Dua buah transistor pada jalur keluaran op-amp berguna sebagai driver relay, sehingga arus sebagian besar mengalir dari transistor bukan dari output op-amp.
Sinyal listrik dengan frekuensi diatas 20 Khz jika anda hubungkan dengan loudspeaker maka akan menghasilkan gelombang ultrasonik. Kecepatan rambat dari gelombang suara jauh lebih kecil dari gelombang elektromagnetik (radio) sehingga bisa dilakukan perhitungan waktu sebagai dasar perhitungan jarak suatu benda.
2.1.5. Pengukur Jarak dengan UltraSonic
Teknik echo sounder yang dipakai untuk mengukur kedalaman laut, bisa dibuat alat pengukur jarak dengan ultra sonic. Pengukur jarak ini memakai rangkaian yang sama dengan Jam Digital dalam artikel yang lalu, ditambah dengan rangkaian pemancar dan penerima Ultra Sonic.
Gambar 2.8. Prinsip Echo Sounder
2.1.6. Transducer Sensor Ultrasonik
Transducer ultrasonic adalah komponen elektronika yang dapat mengubah energi listrik menjadi energi mekanik dalam bentuk gelombang suara ultrasonic dan sebaliknya. Gelombang suara ultrasonic adalah gelombang suara yang tidak dapat didengar oleh manusia secara normal karena frekuensi gelombang ultrasonic diatas 20KHz. Transducer ultrasonic dalam aplikasinya selalu berpasangan, yaitu terdapat transducer ultrasonic yang berfungsi sebagai pemancar (transmitter ) dan transducer ultrasonic sebagai penerima (receiver). Secara umum transducer ultrasonic yang beredar dipasaran adalah sepasang dandapat dilihat pada gambar salah satu contoh transducer ultrasonic berikut.
2.2 Mikrokontroller ATmega 8535 2.2.1 Pengertian Mikrokontroller
Mikrokontroler adalah sebuah system microprocessor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi (teralamati) dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai. Sehingga kita tinggal memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya. Teknologi yang digunakan pada mikrokontroler AVR berbeda dengan mikrokontroler seri MCS-51.
AVR berteknologi RISC (Reduced Instruction Set Computer), sedangkan seri MCS-51 berteknologi CISC (Complex Instruction Set Computer). Mikrokontroler AVR dapat dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT89RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, kelengkapan periperal dan fungsi-fungsi tambahan yang dimiliki. Berikut ini penjelasan lebih lengkap mengenai Mikrokontroler ATMega 8535: Mikrokontroller ATMega8535 adalah mikrokontroler CMOS 8 bit daya rendah berbasis arsitektur RISC. Instruksi dikerjakan pada satu siklus clock, ATMega8535 mempunyai throughput
Jika kita sudah selesai bermain, maka akan diberikan suatu nilai, nilai inilah yang menentukan berapa jumlah tiket yang bisa diperoleh dan jika dikumpulkan dapat ditukar dengan berbagai macam hadiah. Sistem tiket ini ditangani dengan mikrokontroler, karena tidak mungkin menggunakan computer PC yang harus dipasang disamping (atau di belakang) mesin permainan yang bersangkutan. Selain system tiket, kita juga dapat menjumpai aplikasi mikrokontroler dalam bidang pengukuran jarak jauh atau yang dikenal dengan system telemetri.
Mikrokontroler ATmega8535 memiliki beberapa fitur atau spesifikasi yang menjadikannya sebuah solusi pengendali yang efektif untuk berbagai keperluan. Fitur-fitur tersebut antara lain:
1. Saluran I/O sebanyak 32 buah, yang terdiri atas Port A, B, C dan D 2. ADC (Analog to Digital Converter)
3. Tiga buah Timer/Counter dengan kemampuan perbandingan 4. CPU yang terdiri atas 32 register
5. Watchdog Timer dengan osilatorinternal
6. SRAM sebesar 512 byte
7. Memori Flash sebesar 8kb dengan kemampuan read while write
8. Unit Interupsi Internal dan External
9. Port antarmuka SPI untuk men-download program ke flash
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi 11.Antarmuka komparator analog
12.Port USART untuk komunikasi serial.
2.2.2 Chip Mikrokontroller ATmega 8535
Hal ini disebabkan semua komponen penting tersebut telah ditanam bersama dengan sistem prosesor ke dalam IC tunggal mikrokontroler bersangkutan. Dengan alasan itu sistem mikrokontroler dikenal juga dengan istilah populer the real Computer On a Chip (komputer utuh dalam keping tunggal), sedangkan sistem mikroprosesor dikenal dengan istilah yang lebih terbatas yaitu Computer On a Chip (computer dalam keeping tunggal). Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock.
a. Sebuah Central Processing Unit 8 bit. b. Osilatc : Internal dan rangkaian pewaktu. c. RAM internal 128 byte.
d. Flash Memory 2 Kbyte.
e. Lima buah jalur interupsi (dua buah interupsi eksternal dan tiga buah interupsi internal).
f. Empat buah programmable port I/O yang masing – masing terdiri dari delapan buah jalur I/O.
g. Sebuah port serial dengan control serial full duplex UART.
h. Kemampuan untuk melaksanakan operasi aritmatika dan operasi logika.
[image:34.595.119.505.573.712.2]Kecepatan dalam melaksanakan instruksi per siklus 1 mikrodetik pada frekuensi 1 MHz. Membuat perbandingan di antara ragam mikrokontroler, bukanlah pekerjaan yang mudah karena banyak parameter yang perlu dipertimbangkan. Salah satu cara praktis yang dapat dilakukan adalah dengan mengambil salah satu paramater, misalkan kecepatan pemrosesannya. Pada Tabel 2.1. menunjukkan perbandingan kecepatan prosesor dan efisiensi eksekusi dari beberapa mikrokontroler populer.
Tabel 2.1. Perbandingan Kecepatan Mikrokontroler pada Beberapa Merek Mikrokontroler Produsen Ukuran Kode
Terkompilasi
Waktu Eksekusi (Siklus)
AVR ATMEL
112
335
8051 INTEL 9384
PIC1674 MICROCHIP 2492
Tabel 2.1. terlihat bahwa ketika bekerja dengan frekuensi siklus normal (clock) yang sama, mikrokontroler keluarga AVR bekerja 7 kali lebih cepat dibandingkan dengan PIC1674, 15 kali lebih cepat daripada 68 HC11, dan 28 kali lebih cepat dibanding 8051. Ditinjau dari kemampuan dan fasilitas yang dimiliki mikrokontroler ATmega 8535 keluarga AVR cocok dipilih untuk membangun bermacam-macam aplikasi (embedded system). Kemasan mikrokontroler ATmega 8535 dapat dilihat pada Gambar 2.10.
Kaki/pin (Input/Output)
2.2.3 Konfigurasi Pin ATmega 8535
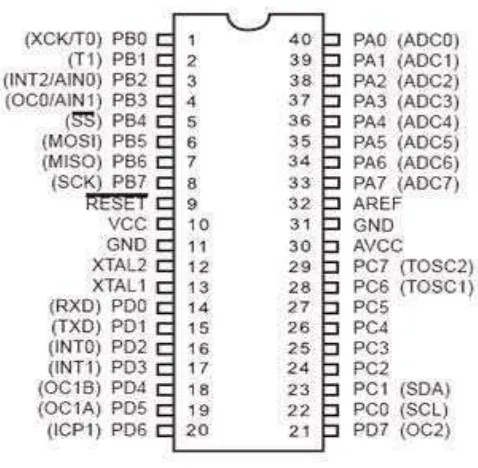
Mikrokontroler AVR ATMega memiliki 40 pin dengan 32 pin diantaranya digunakan sebagai port paralel. Satu port paralel terdiri dari 8 pin, sehingga jumlah port pada mikrokontroler adalah 4 port, yaitu port A, port B, port C dan
port D. Sebagai contoh adalah port A memiliki pin antara port A.0 sampai dengan
port A.7, demikian selanjutnya untuk port B, port C, port D.
[image:37.595.212.451.253.487.2]Gambar 2.12. Konfigurasi IC Mikrokontroller ATmega 8535 Penjelasan mengenai pin yang terdapat pada mikrokontroler ATMega 8535:
Tabel 2.2. Deskripsi Pin Mikrokontroler ATmega 8535
Nama Deskripsi
Vcc Tegangan catu digital Gnd Catu daya negatip (Ground)
dapat diatur untuk memberikan internal pull-up resistors
pada tiap bit. Penyangga data (buffer) pada keluaran Port A mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Ketika pin PA0 – PA7 digunakan sebagai input dan secara eksternal dikonfigurasi pulled-low, pin-pin tersebut menghasilkan arus apabila internal pull-up resistors diaktifkan. Pin pada Port A berada dalam kondisi tri-stated ketika kondisi reset diaktifkan, meskipun clock tidak bekerja.
Port B (PB0-PB7) Port B adalah port Input/Output dwi-arah 8-bit dengan
internal pull-up resistors pada tiap bit. Penyangga data pada output Port B mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Sebagai
input, Port B yang secara eksternal dikonfigurasi pulled-low akan menghasilkan arus jika pull-up resistors
diaktifkan. Pin pada Port B berada dalam kondisi tri-stated
ketika kondisi reset diaktifkan, meskipun clock tidak bekerja. Port B juga memiliki fungsi lain yaitu TO, XCK, T1, AIN0, INT2, AIN1, SS, MOSI, MISO dan SCK. Port C (PC0-PC7) Port C adalah sebuah port Input/Output dwi-arah 8-bit
pulled-low akan menghasilkan arus jika pull-up resistors
diaktifkan. Pin pada Port C berada dalam kondisi tri-stated
ketika kondisi reset diaktifkan, meskipun clock tidak bekerja. Port C juga memiliki fungsi lain seperti TOSC2 dan TOSC1.
Port D (PD0-PD7) Port D adalah sebuah port Input/Output dwi-arah 8-bit dengan internal pull-up resistors pada tiap bit. Penyangga data pada output Port D mempunyai karakteristik gerak simetris dengan kapabilitas high sink maupun source. Sebagai input, Port D yang secara eksternal dikonfigurasi
pulled-low akan menghasilkan arus jika pull-up resistors diaktifkan. Pin pada Port D berada dalam kondisi tri-stated ketika kondisi reset diaktifkan, meskipun clock tidak bekerja. Port D juga memiliki fungsi lain seperti RXD
Nama Deskripsi
, TXD, INT0, INT1, OC1B, OC1A, ICP1, OC2, SCL dan SDA.
RESET Input Reset. Kondisi low-level pada pin ini yang lebih lama dibanding panjang pulsa minimum akan menyebabkan kondisi reset, meskipun clock tidak bekerja. Pulsa yang lebih pendek tidak dijamin menyebabkan kondisi reset.
AVCC Pin tegangan catu untuk Port A dan ADC. AVcc harus terhubung secara eksternal dengan Vcc, meskipun ADC tidak digunakan. Jika ADC digunakan, AVcc harus terhubung dengan Vcc melalui sebuah low-pass filter. AREF Pin referensi analog bagi ADC
2.2.4.Port Masukan/Keluaran (Input/Output Port)
Port masukan/keluaran (Input/Output Port) AVR memiliki fungsionalitas Baca-Mengubah-Tulis (Read-Modify-Write) saat digunakan sebagai port
Input/Output (Data Sheet mikrokontroler ATmega 8535). Hal ini berarti bahwa arah dari satu pin port dapat diubah tanpa perlu mengubah arah dari pin yang lain dengan instruksi. Hal yang sama diterapkan ketika mengubah nilai gerak (jika dikonfigurasi sebagai Input) atau enabel/disabel resistor pull-up (jika dikonfigurasi sebagai masukan Output).
Tiap-tiap Output memiliki karakteristik gerak simetris dengan kapabilitas
Gambar 2.13. Konfigurasi Internal Pin Port
Semua referensi register dan bit dalam bagian ini dituliskan dalam bentuk umum. Huruf kecil “x” mewakili huruf penomoran bagi port, dan huruf kecil “n” mewakili nomor bit (Data Sheet mikrokontroler ATmega 8535). Namun sewaktu menggunakan definisi register atau bit dalam program, bentuk yang tepat harus digunakan. PORT B 3 bagi bit no. 3 dalam Port B, di sini didokumentasikan secara umum sebagai PORTxn.
Tiga lokasi alamat memori Input/Output dialokasikan bagi tiap port. Masing-masingnya bagi Data Register (PORTx), Data Direction Register
(DDRx), dan Port Input Pin (PINx) (Data Sheet mikrokontroler ATmega 8535). Lokasi Input/Output Port Input Pin hanya bisa dibaca, sementara Data Register dan data yang keluar (Data Direction Register) dapat dibaca/tulis. Sebagai tambahan, bit Pull-up Disable (PUD) dalam SFIOR mendisabel fungsi pull-up
mempengaruhi penggunaan pin yang lain dalam port sebagai Input/Output digital umum.
2.2.5. Konstruksi ATMega 8535
Mikrokontroler ATmega8535 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
a. Memori Program
ATmega8535 memiliki kapasitas memori progam sebesar 8 Kbyte yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing alamat memiliki lebar data 16 bit. Sehingga organisasi memori program seperti ini sering dituliskan dengan 4K x 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi. Jika tidak menggunakan fitur
boot Loader Flash maka semua kapasitas memori program di atas dapat
digunakan untuk program aplkasi. Tetapi jika kita menggunakan fitur Boot Loader Flash maka pembagian ukuran kedua bagian ini ditentukan oleh BOOTSZ fuse.
b. Memori Data
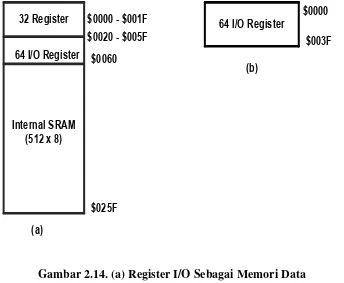
ST maka register I/O di atas menempati alamat 0020 – 005F. tetapi jika register – register I/O di atas diakses seperti mengakses I/O pada umumnya menggunakan instruksi IN atau OUT maka register I/O di atas menempati alamat memori 0000h – 003Fh.
32 Register 64 I/O Register
Internal SRAM (512 x 8)
$0000 - $001F $0020 - $005F
$0060
$025F 64 I/O Register
$0000
$003F
(a)
[image:43.595.140.484.205.488.2](b)
Gambar 2.14. (a) Register I/O Sebagai Memori Data (b) Register I/O Sebagai I/O
c. Memori EEPROM
ATmega8535 memiliki memori EEPROM sebesar 512 byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM
Address, register EEPROM Data, dan register EEPROM Control. Untuk
mengakses data dari SRAM. ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535 dapat dikonfigurasi, baik secara single ended input maupun differential input.
Selain itu, ADC ATmega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri. ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
Serial Peripheral Interface (SPI) merupakan salah satu mode komunikasi serial syncrhronous kecepatan tinggi yang dimiliki oleh ATmega8535. Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter (USART) juga merupakan salah satu mode komunikasi serial yang dimiliki oleh ATmega8535. USART merupakan komunikasi yang memiliki fleksibilitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antarmikrokontroler maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART. USART memungkinkan transmisi data baik secara syncrhronous maupun asyncrhronous,
sehingga dengan memiliki USART pasti kompatibel dengan UART. Pada ATmega8535, secara umum pengaturan mode syncrhronous maupun
saja. Jika pada mode asyncrhronous masing-masing peripheral memiliki sumber clock sendiri, maka pada mode syncrhronous hanya ada satu sumber clock yang digunakan secara bersama-sama. Dengan demikian, secara hardware untuk mode
asyncrhronous hanya membutuhkan 2 pin yaitu TXD dan RXD, sedangkan untuk mode syncrhronous harus 3 pin yaitu TXD, RXD dan XC.”
2.3. Bahasa Pemograman C
Bahasa C dikembangkan pada Lab Bell pada tahun 1978, oleh Dennis Ritchi dan Brian W. Kernighan. Pada tahun 1983 dibuat standar C yaitu stnadar ANSI ( American National Standards Institute ), yang digunakan sebagai referensi dari berbagai versi C yang beredar dewasa ini termasuk Turbo C.
tersebar di berbagai platform dari windows samapi linux dan dari PC hingga main frame.
2.3.1 Struktur Bahasa C
a. Program bahasa C tersusun atas sejumlah blok fungsi.
b. Setiap fungsi terdiri dari satu atau beberapa pernyataan untuk melakukan suatu proses tertentu.
c. Tidak ada perbedaan antara prosedur dan fungsi.
d. Sstiap program bahasa C mempunyai suatu fungsi dengan nama “main” (Program Utama).
e. Fungsi bisa diletakkan diatas atau dibawah fungsin “main”. f. Setiap statemen diakhiri dengan semicolon (titik koma).
2.3.2 Pengenal
Pengenal (identifier) merupakan sebuah nama yang didefenisikan oleh pemrograman untuk menunjukkan indetitas dari sebuah konstanta, variable, fungsi, label atau tipe data khusus. Pemberian nama sebuah pengenal dapat ditentukan bebas sesuai keinginan pemrogram tetapi harus memenuhi atura berikut :
Karakter pertama tidak boleh menggunakan angka
Karakter kedua dapat berupa huruf, angka, atau garis bawah.
Tidak boleh menggunakan spasi.
Tidak boleh mengunakan kata – kata yang merupakan sitaks maupun operator dalam pemrograman C, misalnya : Void, short, const, if, static, bit, long, case, do, switch dll.
2.3.3 Tipe Data
Tipe data merupakan suatu hal yang penting untuk kita ketahui pada saat belajar bahasa pemrograman. Kita harus dapat menentukan tipe data yang tepat untuk menampung sebuah data, baik itu data berupa bilangan numerik ataupun karakter. Hal ini bertujuan agar program yang kita buat tidak membutuhkan pemesanan kapling memori yang berlebihan. Seorang programmer yang handal harus dapat memilih dan menentukan tipe data apa yang seharusnya digunakan dalampembuatan sebuah program. Secara garis besar tipe data pada bahasa C dibagi menjadi beberapa bagian antara lain sebagai Berikut Macam-Macam Tipe Data Pada Bahasa C :
1. Tipe Data Karakter
2. Tipe Data Bilangan Bulat
Tipe data bilangan bulat atau dapat disebut juga bilangan desimal merupakan sebuah bilangan yang tidak berkoma. Pada bahasa C terdapat bermacam-macam tipe data yang dapat kita gunakan untuk menampung bilangan bulat. Kita dapat menyesuaikan penggunaan tipe data dengan terlebih dahulu memperhitungkan seberapa besar nilai yang akan kita simpan. Contohnya seperti berikut, kiata akan melakukan operasi penjumlahan nilai 300 dan 100 dan hasilnya akan disimpan pada variabel c.
Jika dilihat, hasil dari penjumlahan tersebut nilainya akan lebih besar dari 255 dan nilainya pasti positif, oleh karena itu sebaiknya kita menggunakan tipe data unsigned int. Namun berbeda halnya jika saya ingin melakukan operasi pengurangan -5 - 300, jika dilihat hasilnya akan negatif maka selayaknya digunakan variabel dengan tipe data int.
3. Tipe Data Bilangan Berkoma
Pada bahasa C terdapat dua buah tipe data yang berfungsi untuk menampung data yang berkoma. Tipe data tersebut adalah float dan double. Double lebih memiliki panjang data yang lebih banyak dibandingkan float.
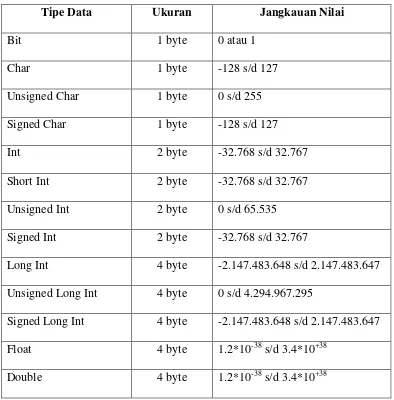
Tabel 2.3. Tipe Data
Tipe Data Ukuran Jangkauan Nilai
Bit 1 byte 0 atau 1 Char 1 byte -128 s/d 127 Unsigned Char 1 byte 0 s/d 255 Signed Char 1 byte -128 s/d 127 Int 2 byte -32.768 s/d 32.767 Short Int 2 byte -32.768 s/d 32.767 Unsigned Int 2 byte 0 s/d 65.535 Signed Int 2 byte -32.768 s/d 32.767
Long Int 4 byte -2.147.483.648 s/d 2.147.483.647 Unsigned Long Int 4 byte 0 s/d 4.294.967.295
Signed Long Int 4 byte -2.147.483.648 s/d 2.147.483.647 Float 4 byte 1.2*10-38 s/d 3.4*10+38
Double 4 byte 1.2*10-38 s/d 3.4*10+38
2.3.4 Konstanta Dan Variabel
2.3.5 Komentar
Komentar adalah tulisan – tulisan yang tidak dianggap sebagai bagian dari tibuh program. Komentar digunakan untuk memberikan penjelasan, informasi ataupun keterangan – keterangan yang dapat membantu mempermudah dalam memahami kode program baik bagi si pembuat program maupun bagi orang lain yang membacanya. Komentar yang hanya satu baris ditulis dengan diawali dengan ‘/ /’ sedangkan komentar yang lebih dari satu baris diawali dengan ‘/*’ dan diakhiri dengan ‘*/’. Selain digunakan untuk memberikan keterangan program, komentar juga dapat dipakai untuk membantu dalam pengujian program yaitu dengan menon-aktifkan dan mengaktifkan kemnbali bagian program tertentu selama proses pengujian. Dengan cara seperti ini tentu kita akan dapat lebih menghemat waktu bila dibandingkan dengan menulis dan menghapus bagian program tertentu berulang –ulang.
2.4. Operator Bahasa C 2.4.1 Operator Aritmatika
Operator aritmatika adalah beberapa operator yang digunakan untuk melakukan perhitungan aritmatika.
Tabel 2.4. Operator Aritmatika
Operator Keterangan
+ Operator untuk operasi penjumlahan - Operator untuk operasi pengurangan * Operator untuk operasi perkalian
Operator *, / dan % memiliki prioritas yang lebih tinggi bila dibandingkan dengan operator + dan –
2.4.2. Operator Pembanding
Operator pembanding adalah operator yang digunakan untuk membandingkan 2 buah data. Hasil operator pembanding bukan berupa nilai data tetapi hanya bernilai benar (‘1’) atau salah (‘0’) saja. Berikut adalah tabel operator pembanding :
Tabel 2.5. Operator Pembanding
Operator Contoh Arti
== x == y Bernilai benar jika kedua data sama dan bernilai salah jika sebaliknya
!= x != y Bernilai benar jika kedua data tidak sama dan bernilai salah jika sebaliknya
> x > y Bernilai benar jika data x lebih besar dari y dan bernilai salah jika sebaliknya
< x < y Bernilai benar jika data x lebih kecil dari y dan bernilai salah jika sebaliknya
>= x >= y Bernilai benar jika data x ,ebih besar atau sama denga y dan bernilai salah jika sebaliknya
2.4.3. Operator Logika
Operator logika digunakan untuk membentuk suatu logika atas dua buah kondisi atau lebih. Berikut adalah tabel operator logika :
Tabel 2.6. Operator Logika
Operator Keterangan
&& Operator untuk logika AND
││ Operator untuk logika OR ! Operator untuk NOT
2.4.4. Fungsi Pustaka
Bahasa C memiliki sejumlah fungsi pustaka yang berada pada file-file tertentu dan sengaja disediakan untuk menangani berbagai hal dengan cara memanggil fungsi-fungsi yang telah dideklarasikan di dalam file tersebut. Dalam banyak hal, pustaka-pustaka yang tersedia tidak berbentuk kode sumber melainkan dalam bentuk yang telah dikompilasi. Pada saat proses linking kode-kode dari fungsi ini akan dikaitkan dengan kode-kode-kode-kode yang ditulis oleh pemrograman.
Beberapa fungsi pustaka yang telah disediakan oleh CodeVisionAVR antara laian adalah :
• Fungsi tipe karakter (ctype.h)
• Fungsi standar I/O (stdio.h)
• Fungsi matematika (math.h)
• Fungsi string (string.h)
• Fungsi konversi akses memori (mem.h)
• Fungsi tunda (delay.h)
• Fungsi LCD (lcd.h)
2.5. LCD (Liquid Crystal Display)
LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan. Penampil LCD mulai dirasakan menggantikan fungsi dari penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna. Teknologi LCD memberikan keuntungan dibandingkan dengan teknologi CRT, kaena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan. Beberapa keuntungan LCD dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
Gambar 2.15. LCD Pendeteksi Jarak
baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda trasparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan. Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa microampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil.
Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan. LCD yang digunakan adalah jenis LCD yang menampilkan data dengan 2 baris tampilan pada display. Keuntungan dari LCD ini adalah :
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya mengunakan 8 bit data dan 3 bit control.
3. Ukuran modul yang proporsional.
LCD 16x2 10 11 12 13 11 12 13 14 D0 D1 D2 D3 D4 D5 D6 D7 2 15 +5VDC RS RW EN 4 5 6
1 3 16 VCC V+BL
[image:55.595.127.505.531.702.2]GND LCD Drv V-BL
Gambar 2.16. Konfigurasi Pin LCD
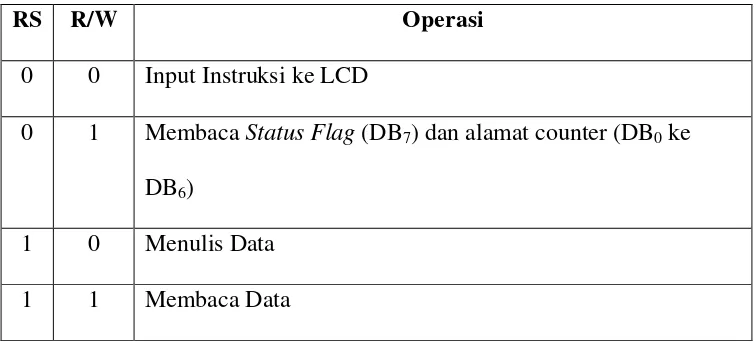
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display Character Blink, Cursor Shift, dan Display Shift. Tabel 2.3 menunjukkan operasi dasar LCD.
Tabel 2.7. Operasi Dasar LCD
RS R/W Operasi
0 0 Input Instruksi ke LCD
0 1 Membaca Status Flag (DB7) dan alamat counter (DB0 ke
DB6)
Lapisan film yang berisis Kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat teganga dicatukan pada beberapa pasang elektroda, molekul – molekul Kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang di aktifka.
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat popular untuk aplikasi pada kalkulator, arloji digital, dan instrument elektronika lain seperti Global Positioning System (GPS), baragraph display dan multimeter digital. LCD umumnya dikemas dalam bentuk Dual In Line Package (DIP) dan mempunyai kemampuan untuk menampilkan beberapa kolom dan baris dalam satu panel. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
Metode screening adalah mengaktifkan daerah perpotongan suatu kolo dan suatu baris secara bergantian dan cepat sehingga seolah-olah aktif semua. Penggunaan metode ini dimaksudkan untuk menghemat jalur yang digunakan untuk mengaktifkan panel LCD. Saat ini telah dikembangkan berbagai jenis LCD, mulai jenis LCD biasa, Passive Matrix LCD (PMLCD), hingga Thin-Film
Transistor Active Matrix (TFT-AMLCD). Kemampuan LCD juga telah
Tabel 2.8. Konfigurasi Pin LCD
Pin No. Keterangan Konfigurasi Hubung
1 GND Ground
2 VCC Tegangan +5VDC
3 VEE Ground
4 RS Kendali RS
5 RW Ground
6 E Kendali E/Enable
7 D0 Bit 0
8 D1 Bit 1
9 D2 Bit 2
10 D3 Bit 3
11 D4 Bit 4
12 D5 Bit 5
13 D6 Bit 6
14 D7 Bit 7
15 A Anoda (+5VDC)
16 K Katoda (Ground)
2.6. Regulator Tegangan
penyebab utama terjadinya ketidakstabilan pada power supply. Pada sebagian peralatan elektronika, terjadinya perubahan catu daya akan berakibat cukup serius. Untuk mendapatkan pencatu daya yang stabil diperlukan regulator tegangan. Regulator tegangan untuk suatu power supply paling sederhana adalah menggunakan dioda zener. Rangkaian dasar penggunaan dioda zener sebagai regulator tegangan dapat dilihat pada gambar rangkaian dibawah.
Gambar 2.17. Regulator Tegangan
Regulator Tegangan Pada Power Supply regulator tegangan,regulator tegangan zener,regulator zener,teori regulator,fungsi regulator,rangkaian regulator,skema regulator,regulator power supply,membuat regulator,dasar regulator,rangkaian regulator zener,teori regulator tegangan,contoh regulator tegangan Rangkaian pencatu daya (power supply) dengan regulator diode zener pada gambar rangkaian diatas, merupakan contoh sederhana cara pemasangan regulator tegangan dengan dioda zener.
pemasangan ini, diode zener hanya akan berkonduksi saat tegangan reverse bias mencapai tegangan breakdown dioda zener. Penyearah berupa rangkaian diode tipe jembatan (bridge) dengan proses penyaringan atau filter berupa filter-RC. Resistor seri pada rangkaian ini berfungsi ganda. Pertama, resistor ini menghubungkan C1 dan C2 sebagai rangkaian filter. Kedua, resistor ini berfungsi sebagai resistor seri untuk regulator tegangan (dioda zener). Diode zener yang dipasang dapat dengan sembarang dioda zener dengan tegangan breakdown misal dioda zener 9 volt.
Tegangan output transformer harus lebih tinggi dari tegangan breakdown dioda zener, misalnya untuk penggunaan dioda zener 9 volt maka gunakan output transformer 12 volt. Tegangan breakdown dioda zener biasanya tertulis pada body dari dioda tersebut. Rangkaian catu daya berfungsi untuk menyediakan arus dan tegangan tertentu sesuai dengan kebutuhan beban dari sumber daya listrik yang ada. Untuk mencukupi kebutuhan beban DC dari jala-jala, diperlukan suatu rangkaian catu daya yang mengubah tegangan AC ke DC.
Biasanya dilakukan dengan suatu rangkaian penyearah yang tergandeng dengan trafo untuk mendapatkan tegangan yang sesuai. Kemudian untuk mengkompensasi perubahan tegangan jala-jala dan beban, rangkaian catu daya dilengkapi dengan suatu regulator atau pengatur tegangan. Regulator linier melalui transistor yang terpasang secara seri mengalihkan daya dari tegangan masukan (Vi) menjadi tegangan keluaran (Vo) secara kontinyu. Dalam operasi tersebut, regulator linier mendisipasi daya. Semakin besar perbedaan Vi dan Vo
Regulator pensaklaran menggunakan transistor daya dalam ragam
switching (sebagai saklar) untuk menyimpankan energi ke dalam induktor dan kapasitor yang kemudian disalurkan kepada beban. Catu daya dengan regulator pensaklaran yang beroperasi frekuensi tinggi lebih efisien, lebih ringan, dan mempunyai volume yang lebih kecil dibanding catu daya dengan regulator linier yang tergandeng trafo 50Hz. Namun regulator pensaklaran mempunyai riak yang lebih besar pada keluarannya bila dibandingkan dengan regulator linier.
Hal ini disebabkan operasi switching di dalam rangkaian itu sendiri. Disini akan dibahas perancangan suatu catu daya dengan dua tahap regulasi. Regulator pensaklaran sebagai regulator awal (preregulator) dan regulator linier sebagai regulator akhir (post regulator). Tujuan utama perancangan adalah untuk mengetahui karakteristik dari catu daya dengan dua tahap regulasi terutama dalam persentase regulasi, efisiensi, dan tegangan riak pada keluaran.
2.6.1 Regulator Tegangan DC (Direct Current)
Regulator tegangan dalam perangkat dan rangkaian elektronika sangatlah penting, karena hal ini sangat mempengaruhi kinerja dan stabilitas dari suatu perangkat yang ada. Apabila suatu perangkat tidak dilengkapi suatu komponen yang mendukung untuk regulasi catu daya maka tidak heran apabila suatu perangkat tersebut tidak akan bertahan lama, meskipun pada saat awal pembuatan perangkat tersebut terlihat normal.
suatu regulator tegangan akan lebih stabil dan mempertahankan level tegangan tersebut sesuai dengan batasan level tegangan pada tiap regulator sampai batas maksimum arus yang mampu diberikan oleh keluaran dari suatu regulator tegangan tersebut.
Sehingga tidak heran apabila suatu perangkat yang telah dilengkapi regulator tegangan, keluaran masih tetap turun dibawah batas level tegangan tersebut karena telah melampaui batasan arus listrik yang mampu diberikan oleh suatu regulator tegangan akibatnya pada komponen regulator tegangan terjadi panas yang berlebihan (overheat) yang berakibat merusak regulator tegangan itu sendiri apabila digunakan dalam waktu yang lama.
Biasanya untuk mengantisipasi penurunan tegangan akibat arus listrik yang dibebankan melebihi dari batasan kemampuan regulator dapat ditambahkan suatu transistor sebagai penguat arus dengan catatan bahwa arus dari sumber yang masuk ke regulator harus lebih besar dari batasan arus maksimum regulator tegangan itu sendiri. Pada regulator tegangan biasanya dibedakan menjadi 2, yaitu regulator tetap dan regulator yang dapat diubah-ubah.
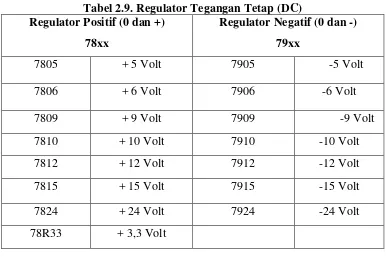
Berikut ini tabel regulator tegangan DC yang memiliki nilai level tegangan tetap Tabel 2.9. Regulator Tegangan Tetap (DC)
Regulator Positif (0 dan +) 78xx
Regulator Negatif (0 dan -) 79xx
7805 + 5 Volt 7905 -5 Volt 7806 + 6 Volt 7906 -6 Volt 7809 + 9 Volt 7909 -9 Volt 7810 + 10 Volt 7910 -10 Volt 7812 + 12 Volt 7912 -12 Volt 7815 + 15 Volt 7915 -15 Volt 7824 + 24 Volt 7924 -24 Volt 78R33 + 3,3 Volt
Berikut ini tabel contoh regulator tegangan tidak tetap.
Tabel 2.10. Regulator Tegangan Tidak Tetap (AC) Regulator Positif Tidak Tetap (Adjustable)
LM 117 0 – 40 Volt, 1,5 Amp LM 317 0 – 40 Volt, 1,5 Amp LM 723 0 – 30 Volt, 150 mA L 200 2,6 – 36 Volt, 2 Amp
2.6.2. Penyearah (Rectifier)
Gambar 2.18. Rangkaian Penyearah Sederhana
Pada rangkaian ini, dioda berperan untuk hanya meneruskan tegangan positif ke beban RL. Ini yang disebut dengan penyearah setengah gelombang (half wave). Untuk mendapatkan penyearah gelombang penuh (full wave) diperlukan transformator dengan center tap (CT).
Gambar 2.19. Rangkaian Penyearah Gelombang Penuh
gelombang. Rectifier gelombang penuh tidak saja lebih efisien namun juga hanya membutuhkan komponen penghalus dan komponen reservoir yang lebib sedikit, terdapat dua jenis dasar rectifier gelombang penuh yaitu dua-fase dan jenis rectifier jembatan.
VAC
D1
C1 R1 T1
1
2
3
4
1 2
Gambar 2.20. Rangkaian Penyearah Setengah Gelombang dengan filter C Gambar 2.21. adalah rangkaian penyearah setengah gelombang dengan filter kapasitor C yang paralel terhadap beban R. Ternyata dengan filter ini bentuk gelombang tegangan keluarnya bisa menjadi rata. keluaran tegangan DC dari rangkaian penyearah setengah gelombang dengan filter kapasitor. Garis b-c kira-kira adalah garis lurus dengan kemiringan tertentu, dimana pada keadaan ini arus untuk beban R1 dicatu oleh tegangan kapasitor. Sebenarnya garis b-c bukanlah garis lurus tetapi eksponensial sesuai dengan sifat pengosongan kapasitor. Rectifier setengah gelombang relative tidak efisien penghantarnya hanya terjadi pada tiap-tipa setengah sikluas positif. Susunan rectifier yang lebih baik akan memanfaatkan setengah siklus positif dan setengah siklus negative.
2.6.3. Penyearah Dua-Fase
menghantar (anodanya akan positif terhadap katodanya) sedangkan D2 tidak menhantar (anodanya akan negative terhadap katodanya). Sehingga hanya D1 saja yang akan menghantar dalam setengah siklus positif. Pada setengah siklus negative, titik C akan positif terhadap titik B. sama halnya titik B akan positif terhadap titik A. dalam kondisi ini D2 akan menghantar (anodanya akan positif terhadap katodanya) sementara D2 akan menghantar (anodanya akan negative terhadap katodanya). Sehingga hanya D2 saja yang akan menghantar dalam setengah siklus negative.
D1 T1
RL A
B
C
D2
Gambar 2.21. Rangkaian Rectifier Dua-Fase
BAB 3
PERANCANGAN DAN PEMBUATAN
3.1. Rangakain Perangkat Keras (Hardware) 3.1.1. Blok Diagram Rangkaian
Sensor Mikrokontroler Atmega 8535
Display/ LCD
Buzzer
Bunyi Driver
Gambar 3.1. Blok Diagram Rangkaian
Diagram blok merupakan diagram dasar dari rancangan sistem terdiri dari beberapa bagian yaitu : input, proses dan output, seperti yang digambarkan pada blok diagram diatas. Input sistem dan rancangan ini adalah sebuah sensor jarak yaitu sensor yang mendeteksi jarak suatu objek, Dalam hal ini menggunakan sensor ultrasonik / PING Sensor. Bagian proses adalah bagian yang memproses input menjadi suatu output, dalam hal ini dilakukan oleh sebuah pengendali mikro yaitu mikrokontroler ATmega 8535.
Jarak yang diberikan pada mikrokontroler membuat mikrokontroler melakukan frekuensi bunyi akan berubah cepat sesuai dengan kondisi jarak yang terdeteksi.
3.1.2. Rangkaian Catu Daya
Rancangan catu daya dibuat dengan trafo penurun tegangan yaitu tegangan 220V menjadi tegangan 12V. setelah tegangan diturunkan tegangan tersebut disearahkan oleh diode penyearah dan kemudian difilter oleh kapasitor. Trafo penurun tegangan (stepdown) yang digunakan adalah trafo tegangan 12V CT dan arus 1A, penyearah menggunakan empat diode yang sebagai penyearah gelombang penuh dari trafo CT. nilai kapasitor perata sebesar 220µF/50V untuk tegangan 17V dihasilkan dengan menggunakan sebuah regulator 7805 yaitu sebuah IC yang berfungsi meregulasi tegangan konstan 5V. Setelah diukur tegangan catu daya 12,49V sedangkan tegangan regulatornya 4,98V. Berikut rangakaian catu daya ditunjukkan pada gambar 3.2.
220µF/50V
AN 7805 5V
220µF/50V
220V 12V
17V
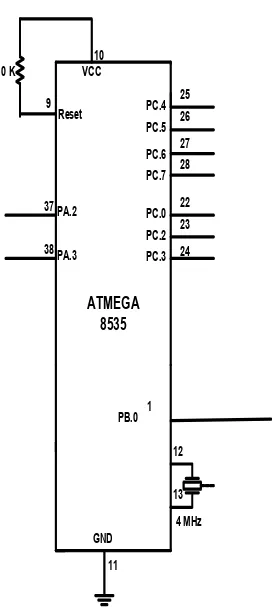
3.1.3. Rangkaian Minimal Mikrokontroller ATmega 8535
Mikrokontroler berfungsi sebagai pengendali utama yaitu membaca sensor dan membunyikan buzzer sesuai dengan jarak yang terdeteksi sekaligus menampilkannya pada display LCD. Rancangan ini menggunakan Mikrokontroler ATmega 8535, sebagai pengendali sistem mikrokontroler diprogram untuk membuat sensor pada PORT D yaitu pin D.0 dan pin D.1. output buzzer diprogram pada PORT B yaitu pin B.0 sedangkan display diprogram pada PORT C. Kristal pada pin 12 dan pin 13 berfungsi sebagai masukan clock, sedangkan resistor pada pin 9 befungsi sebagai reset awal pada saat dihidupkan. Mikrokontroler dengan bahasa C dengan editor CV AVR versi 2,03.
Untuk membaca sensor mikrokontroler akan mengaktifkan pin trigger untuk memulai pembacaan, kemudian menunggu pulsa hingga pin signal memberikan pulsa hasil di deteksi. Signal yang diterima adalah lebar pulsa yang diberikan oleh sensor yaitu berupa selang waktu antara dikirimnya gelombang ultrasonic hingga diterima kembali pantulan dari gelombang tersebut. Jarak objek ke sensor dengan asumsi kecepatan suara pada saat itu adalah 320 m/det sehingaa jarak S = V.t.
Dimana : S = Jarak ( cm)
ATMEGA
8535
Reset
PA.3
PA.2
PC.5
PC.6
PC.3
PC.7
PC.0
PC.2
PC.4
37
38
VCC
PB.0
GND
9
10
10 K
22
23
24
25
26
27
28
1
12
13
11
[image:69.595.180.452.81.692.2]4 MHz
3.1.4. Sensor Ultrasonik PING
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah di atas gelombang suara dari 40 KHz hingga 400 KHz. Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar.
Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya). Pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan gelombang ultrasonik akan diterima kembali oleh unit sensor penerima.
Gambar 3.4. Prinsip kerja Sensor Ultrasonik
Besar amplitudo sinyal elektrik yang dihasilkan sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensoring yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran.
Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian pengirim sampai diterima oleh rangkaian penerima, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara. Prinsip pantulan dari sensor ulrasonik ini dapat dilihat pada gambar 3.4. sebagai berikut:
[image:71.595.185.443.600.714.2]3.1.5. Rangkaian Minimal Sensor Ultrasonik
Pada rangkaian ini Sensor yang digunakan adalah tipe sensor ultrasonic yaitu sensor yang bekerja pada frekuensi ultrasonic sekitar 40 KHz. Prinsip kerja sensor adalah mengirim suatu sinyal ultrasonic dan mendeteksi pantulan sinyal tersebut serta mencari selisih waktu antara pengiriman dengan gelombang pantulan. Tipe sensor yaitu SR04 dengan 4 pin yaitu pin Vcc, ground, pin trigger dan pin signal. Pin trigger dan pin signal diberikan pada masukan mikrokontroler yaitu PORT D. Pendeteksi jarak ini menggunakan sebuah sensor ultrasonic.
Interfacing sensor ultrasonik Ping dengan mikrokrontroler ATMega8535, sebagai pengendali sistem mikrokontroler diprogram untuk membuat sensor pada PORT D yaitu pin D.0 dan pin D.1. Rangkaian skematik sensor jarak ultrasonik dilihat pada Gambar 3.5.
[image:72.595.176.465.420.695.2]ATMEGA 8535 Reset PA.3 PA.2 PC.5 PC.6 PC.3 PC.7 PC.0 PC.2 PC.4 37 38 VCC PB.0 GND 9 10 10 K 22 23 24 25 26 27 28 1 12 13 11 4 MHz VCC echo trig GND 5 V 1 2 3 4 Sensor Ultrasonik
3.1.6. Prinsip Kerja Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik (Transmitter) ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonic. Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1.Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3 KΩ untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor. 3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektor T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor.