BAB I PENDAHULUAN
1.1 Latar Belakang
Pemanfaatan teknologi saat ini sangat berpengaruh pada kehidupan manusia sehari-hari. Mulai dari teknologi yang paling kecil sampai pada yang sangat canggih. Saat ini ada beberapa alat-alat elektronik yang mulai berkembang untuk membantu kegiatan manusia sehari-hari. Mulai dari peralatan hiburan sampai pada peralatan yang dapat mengganti tugas manusia untuk bekerja.
Teknologi saat ini sangat berkembang pesat. Berbagai macam alat elektronik telah dibuat oleh manusia dengan fungsinya masing-masing. Dengan sebuah system kerja tidak jauh berbeda antara satu dengan yang lainnya.
Salah satu perangkat yang paling penting dalam sebuah alat elektronik adalah sebuah sensor yang dapat mendeteksi kejadian atau situasi yang ada di sekelilingnya. Mulai dari sensor suara, sensor api, dan sensor jarak.
Dalam makalah ini kami akan membahas sebuah sensor yang digunakan di sebuah alat elektronik seperti robot dengan menggunakan sensor jarak, dalam hal ini kami memilih untuk membahas sebuah sensor ultrasonic..
1.2 Maksud dan Tujuan
Adapun maksud dan tujuan kami dalam pembuatan makalah dan judul yang diangkat adalah antara lain :
a. Untuk mengetahui dan memahami prinsip kerja sensor ultrasonic b. Sebagai bahan referensi untuk dijadikan acuan bagi pembaca
c. Untuk mengetahui dan memahami jenis-jenis sensor ultrasonic dan prinsip kerjanya d. Mengetahui dan memahami penerapan sensor ultrasonic pada teknologi
1.3 Manfaat
Adapun manfaat yang dapat diambil dari makalah ini yaitu memberikan pengetahuan lebih tentang sensor ultrasonic yang diterapkan dalam teknologi khususnya robotika
1.4 Rumusan Masalah
Yang akan menjadi rumusan masalah dalam makalah ini adalah : a. Pengertian Sensor Ultrasonic
b. Bagaimana sebuah sensor ultrasonic menjadi salah satu alat yang digunakan pada sebuah alat elektronik seperti robot yang bekerja berdasarkan prinsip pantulan suara.
BAB II
TINJAUAN PUSTAKA
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz.
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima Di dalam robotika, sensor sonar mempunyai tiga tujuan yang berbeda,
tetapi berhubungan,yaitu : Penghindaran rintangan (Obstacle avoidance),Pemetaan sonar (Sonar Mapping) dan Pengenalan objek (Object recognition)
Prinsip Kerja dari sensor ultrasonic yaitu Sinyal dipancarkan oleh pemancar ultrasonik.
Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s.
Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya.
Sensor jarak ultrasonik ping adalah sensor 40 khz produksi parallax yang banyak digunakan untuk aplikasi atau kontes robot cerdas
Sensor SFR04 adalah sensor ultrasonik yang diproduksi oleh Devantech. Sensor ini merupakan sensor jarak yang presisi. Dapat melakukan pengukuran jarak 3 cm sampai 3 meter dan sangat mudah untuk dihubungkan ke mikrokontroler menggunakan sebuah pin Input dan pin Output.
Modul Sensor Ultrasonik (sensor PING) merupakan input utama rangkaian yang memancarkan gelombang indicator5 setelah menerima trigger dari mikrokontroler. Setelah menerima pantulan gelombang tersebut, modul sensor PING akan mengirimkan sinyal kembali ke mikrokontroler
BAB III PEMBAHASAN
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz.
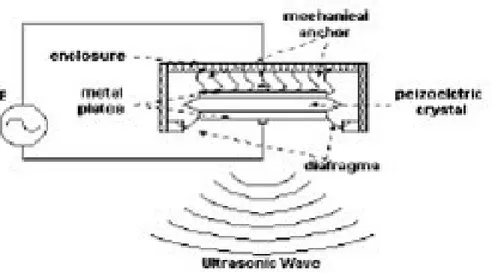
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric.
Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
a. Pemancar Ultrasonik (Transmitter)
Pemancar Ultrasonik ini berupa rangkaian yang memancarkan sinyal sinusoidal berfrekuensi di atas 20 KHz menggunakan sebuah transducer transmitter ultrasonik
Rangkaian Pemancar Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adlah sebagai berikut :
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika
sinyal tersebut membias maju rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan
kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati dioda D1
(D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektotr T1 akan besar sesuai dari penguatan dari transistor.
5. Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati dioda D2 (D2
on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor.
6. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V. Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d -2,5 V).
b. Penerima Ultrasonik (Receiver)
Penerima Ultrasonik ini akan menerima sinyal ultrasonik yang dipancarkan oleh pemancar ultrasonik dengan karakteristik frekuensi yang sesuai. Sinyal yang diterima tersebut akan melalui proses filterisasi frekuensi dengan menggunakan rangkaian band pass filter (penyaring pelewat pita), dengan nilai frekuensi yang dilewatkan telah ditentukan. Kemudian sinyal keluarannya akan dikuatkan dan dilewatkan ke rangkaian komparator (pembanding) dengan tegangan referensi ditentukan berdasarkan tegangan keluaran penguat pada saat jarak antara sensor kendaraan mini dengan sekat/dinding pembatas mencapai jarak minimum untuk berbelok arah. Dapat dianggap keluaran komparator pada kondisi ini adalah high (logika ‘1’) sedangkan jarak yang lebih jauh adalahlow (logika’0’). Logika-logika biner ini kemudian diteruskan ke rangkaian pengendali (mikrokontroler).
Rangkaian Penerima Gelombang Ultrasonik
Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian
2. Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian transistor Q1.
3. Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan
oleh rangkaian dioda D1 dan D2.
4. Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi < 40kHz
melalui rangkaian filter C4 dan R4.
5. Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
6. Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada komparator akan
mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
3.2 Tujuan sensor sonar
Di dalam robotika, sensor sonar mempunyai tiga tujuan yang berbeda, tetapi berhubungan,yaitu :
1. Penghindaran rintangan (Obstacle avoidance): Gema (sinyal echo)pertama yang dideteksi pertama diasumsikan untuk mengukur jarak dari benda terdekat. Robot-robot menggunakan informasi ini untuk merencanakan lintasan di sekitar rintangan dan mencegah benturan/tabrakan.
2. Pemetaan sonar (Sonar Mapping): Beberapa sinyal echo(gema) yang
diperoleh dari pencarian secara putaran atau dari beberapa sensor sonar digunakan untuk membangun peta lingkungan. Seperti halnya tampilan pada radar,satu titik ditempatkan pada cakupan yang dideteksi.
3. Pengenalan objek (Object recognition): Satu urutan dari sinyal echo atau pemetaan sonar diproses untuk menggolongkan sinyal echo, lalu digunakan untuk menggambarkan struktur-struktur dar objek yang dideteksi. Bila berhasil, informasi ini akan bermanfaat untuk navigasi robot.
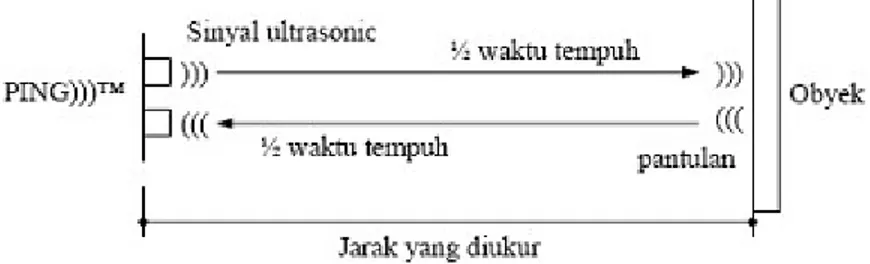
Gambar 2.1 – 2.3 menunjukan sebuah sistem sonar yang sederhana.
Sebuah transducer sonar,T/R,berlaku sebagai pemancar (T) untuk menghasilkan pulsa akustik (P) dan sebagai penerima(R) dari sinyal echo(E). Sebuah objek (O)terletak pada cakupan dari pancaran sonar, lalu memantulkan pulsa P. Sinyal yang dipantulkan oleh objek (O) ke tranduser akan dideteksi sebagai sinyal echo(gema).
Waktu tempuh echo t0, biasa disebut time-of-flight (TOF) yang diukur dari waktu pada saat pulsa ditransmisikan (Gambar 2.2). Jarak objek r0 (Gambar 2.3) dapat dihitung dengan rumus :
Dimana c merupakan kecepatan bunyi (besarnya adalah 344 m/s pada suhu dan tekanan standar). Angka 2 merupakan perjalanan sinyal dari P dan E untuk sekali pengukuran.
3.3 Prinsip Kerja
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
3. Setelah sinyal tersebut sampai di penerima ultrasonik, kemudian sinyal tersebut akan diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus :
S = 340.t/2
dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan t adalah selisih waktu antara pemancaran gelombang ultrasonik sampai diterima kembali oleh bagian penerima ultrasonik.
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara.
3.4 Sensor yang termasuk Sensor Ultrasonic 3.4.1 Sensor Jarak Ultrasonik Ping
Sensor jarak ultrasonik ping adalah sensor 40 khz produksi parallax yang banyak digunakan untuk aplikasi atau kontes robot cerdas. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal ( SIG ) selain jalur 5 v dan ground.Perhatikan Gambar dibawah ini
Gambar 2.4 Sensor jarak ultrasonik ping3
Sensor PING mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik ( 40 KHz ) selama t = 200 us kemudian mendeteksi pantulannya. Sensor PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller pengendali ( pulsa trigger dengan tout min 2
Spesifikasi sensor ultrasonik PING :
Kisaran pengukuran 3 cm – 3 m
2. Input trigger – positive TTL pulse, 2 us min, 5 us tipikal
3. Echo hold off 750 us dari of trigger pulse
4. Delay before next measurement 200 us
5. Brust indikator LED menampilkan aktivitas sensor
Gelombang ini melalui udara dengan kecepatan 344 m/s kemudian mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high pada pin SIG setelah memancarkan gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa High (tIN) akan sesuai dengan lama waktu
tempuh gelombang ultrasonik untuk 2x jarak ukur dengan obyek. Maka jarak yang diukur ialah
[(tIN s x 344 m/s) : 2] meter
Gambar 2.5 Jarak Ukur Sensor Ping4
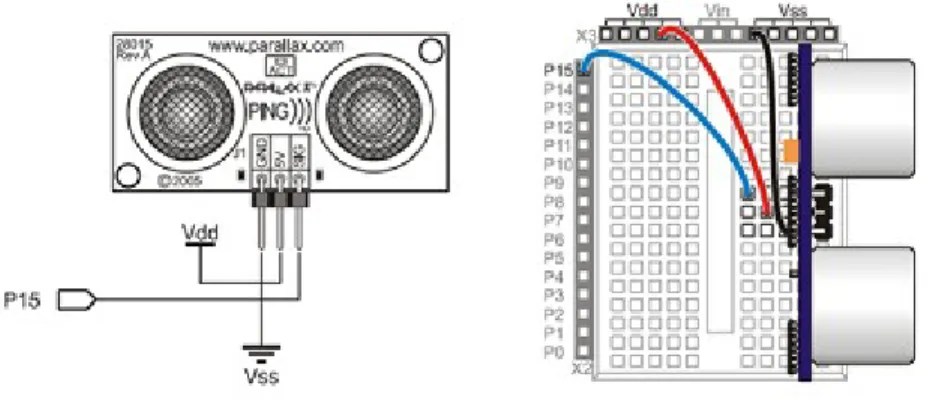
Sistem minimal mikrokontroller ATMega 8535 dan software basic stamp Editor diperlukan untuk memprogram mikrokontroller dan mencoba sensor ini. Keluaran dari pin SIG ini yang dihubungkan ke salah satu port di kit mikrokontroller. Berikut contoh aplikasi sensor PING pada mikrokontroler BS2, dimana pin SIG terhubung ke pa pin7, dan memberikan catu daya 5V dan ground.Fungsi Sig out untuk mentrigger ping, sedangkan fungsi SIGIN digunakan untuk mengukur pulsa yang sesuai dengan jarak dari objek target.
Gambar 2.7 Instalasi Sensor Ping6
Sensor ultrasonic ping akan bekerja jika mendapat suplay tegangan sebesar 5 V DC. dimana tegangan 5 V DC dihubungkan dengan konektor Vcc dan ground pada sensor. Untuk konektor SIG dapat dihubungkan dengan mikrokontroler. Konektor SIG adalah sebagai control sensor ini dalam pendeteksian objek sekaligus pembacaan jarak objek dengan sensor ini. progamer dapat mensetting sensor ini dengan jarak yang telah ditentukan sesuai dengan ring deteksi dari sensor ultrasonic ping ini sesuai dengan kebutuhan penggunaan dari sensor tersebut. Ketika sensor disetting jaraknya maka dengan jarak yang telah ditentukanlah sensor akan bekerja dalam pendeteksian objek. Kisaran jarak yang dapat di baca sensor ultrasonic ping ini adalah 3 cm sampai 3 m.
Selain range jarak antara 3 cm sampai 3 m yang mampu dideteksi oleh sensor ultrasonik ping, sudut pancaran dari sensor jarak ultrasonic ping adalah dari 0o sampai dengan 30o.
3.4.2 Sensor SFR04
Sensor SFR04 adalah sensor ultrasonik yang diproduksi oleh Devantech. Sensor ini merupakan sensor jarak yang presisi. Dapat melakukan pengukuran jarak 3 cm sampai 3 meter dan sangat mudah untuk dihubungkan ke mikrokontroler menggunakan sebuah pin Input dan pin Output.
Sensor Devantech SRF-04 bekerja dengan cara memancarkan sinyal ultrasonik sesaat dan menghasilkan pulsa output yang sesuai dengan waktu pantul sinyal ultrasonik sesaat kembali menuju sensor. Dengan mengukur lebar pulsa pantulan tersebut jarak target didepan sensor dapat diketahui.
Untuk dapat memhami cara kerja dari sensor SRF04 ini perhatikan timming dari pulsa masukan dan keluaran sensor berikut ini:
Berdasarkan data timming diagram, sensor akan memberikan informasi jarak pembacaan dengan informasi berupa pulsa PWM dengan lebar 100µS sampai dengan 18mS.
Dengan 2 buah pin kontrol, antara lain sebuah pin input triger dan sebuah pin output data. Untuk mengaktifkan sensor maka modul diberi triger pulsa maka sensor akan mengeluarkan sinyal pwm dan duty cycle tersebut sebagai jarak objek dengan sensor .
Mikrokontroller memberikan sinyal pulsa high pada pin triger pulse input dari sensor untuk mengaktifkan sensor ultrasonik. Untuk menghitung lebar PWM mengunakan timer0. Pin echo pulse output terhubung dengan pin-pin pada mikrokontroler. Ketika pin echo pulse output high maka timer0 aktif dan ketika pin echo kembali bernilai low maka timer0 dimatikan dan data TCNT0 diambil sebagai data jarak.
3.5 Block Diagram
Modul Sensor Ultrasonik (sensor PING) merupakan input utama rangkaian yang memancarkan gelombang indicator5 setelah menerima trigger dari mikrokontroler. Setelah menerima pantulan gelombang tersebut, modul sensor PING akan mengirimkan sinyal kembali ke mikrokontroler. Switch merupakan simulasi dari gigi transmisi serta switch 5ndica maju. Rangkaian Pengendali merupakan pengendali utama kerja seluruh
rangkaian 5ndicato jarak ini. Rangkaian pengendali berupa sebuah mikrokontroler AT89S52 beserta rangkaian dasarnya. Output terdiri dari LED dan LCD. Pada 5ndicator jarak bagian samping, outputnya hanya berupa LED saja. Sementara pada 5ndicator jarak bagian depan dan belakang, outputnya berupa LED dan LCD.
Modul Sensor Ultrasonic
Output Rangkaian Pengendali
Modul sensor PING merupakan pemancar dan penerima gelombang ultrasonik. Mikrokontroler akan memberikan trigger untuk mengaktifkan modul sensor PING. Apabila terdapat objek di sekitar mobil dalam jarak tertentu, gelombang ultrasonik akan dipantulkan kembali dan modul sensor PING akan menerima pantulan gelombang tersebut. Selanjutnya modul sensor PING akan mengirimkan sinyal kembali ke mikrokontroler. Mikrokontroler memproses data dan menghasilkan tegangan output. Waktu yang dibutuhkan modul sensor PING dari pengiriman gelombang sampai penerimaan pantulan gelombang ultrasonik, dapat ditentukan jarak antara mobil dengan benda tersebut
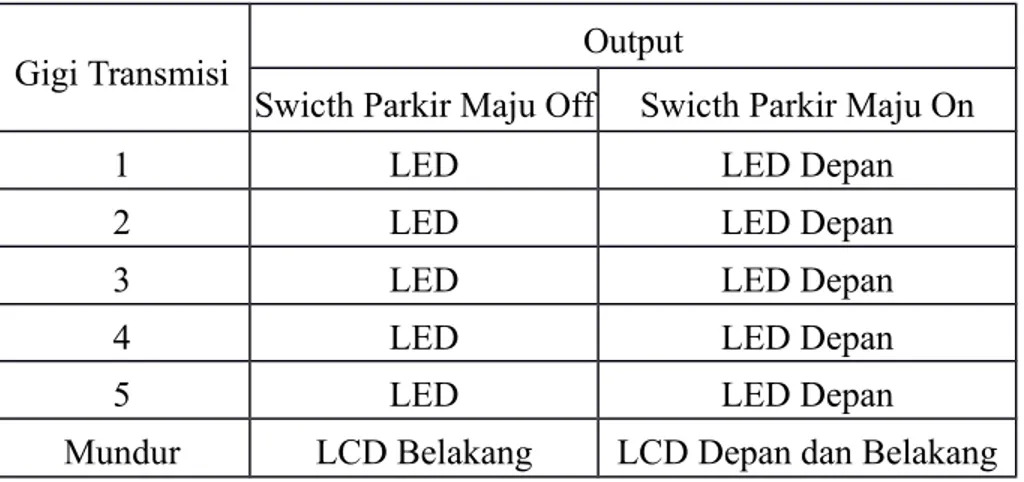
Pada alat ini terdapat dua mode output mikrokontroler yaitu mode normal dan mode khusus, tergantung pada gigi transmisi yang sedang digunakan serta tombol parkir maju. Mode normal berfungsi pada saat mobil bergerak maju (persneling gigi 1 hingga gigi 5) ataupun diam. Sedangkan mode khusus berfungsi pada saat mobil bergerak mundur (gigi transmisi mundur) atau apabila switch parkir maju ditekan. Untuk mensimulasikan gigi transmisi digunakan enam buah pushbutton switch, dan untuk mensimulasikan tombol parkir maju
digunakan satu buah toggle switch. Pada Tabel 1. merupakan output berdasarkan gigi transmisi serta kondisi switch parkir maju.
Tabel 1. Output Berdasarkan Gigi Transmisi Serta Kondisi Switch Parkir Maju
Gigi Transmisi Output
Swicth Parkir Maju Off Swicth Parkir Maju On
1 LED LED Depan
2 LED LED Depan
3 LED LED Depan
4 LED LED Depan
5 LED LED Depan
Mundur LCD Belakang LCD Depan dan Belakang
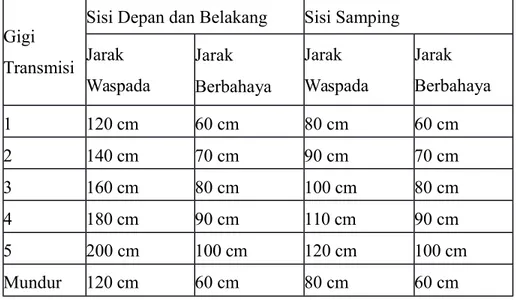
Pada mode normal, output berupa dua buah LED berwarna kuning dan merah (Boylestadt, 1987: 129). LED kuning akan menunjukkan bahwa terdapat benda di dekat mobil pada jarak yang yang harus diwaspadai, sementara LED merah menunjukkan bahwa terdapat benda di dekat mobil pada jarak yang berbahaya. Pada alat ini ditentukan lima jenis batas jarak waspada dan berbahaya antara benda dan mobil, bergantung pada persneling yang digunakan pada saat itu. Jarak waspada dan bahaya juga tidak sama pada tiap sisi mobil. Jarak waspada dan berbahaya sama pada sisi depan dan sisi belakang mobil, namun berbeda dengan sisi samping. Toggle switch berfungsi sebagai switch parkir maju. Apabila tombol ini ditekan pada saat mobil bergerak maju, mode output yang digunakan adalah mode khusus. LCD akan menampilkan jarak sensor bagian depan mobil dengan benda yang terdeteksi. Pada mode khusus,output berupa besaran jarak yang ditampilkan pada LCD. Jarak dihitung per 10 cm dengan pertimbangan lebar tersebut sudah memadai untuk kecepatan pergerakan mobil seperti Tabel 2.
Tabel 2. Batas Jarak Waspada dan Jarak Berbahaya Berdasarkan Gigi Transmisi Pada Sisi Depan dan Belakang Mobil dan Sisi Samping Mobil
Gigi Transmisi
Sisi Depan dan Belakang Sisi Samping Jarak Waspada Jarak Berbahaya Jarak Waspada Jarak Berbahaya 1 120 cm 60 cm 80 cm 60 cm 2 140 cm 70 cm 90 cm 70 cm 3 160 cm 80 cm 100 cm 80 cm 4 180 cm 90 cm 110 cm 90 cm 5 200 cm 100 cm 120 cm 100 cm Mundur 120 cm 60 cm 80 cm 60 cm BAB IV
PENUTUP
4.1 Kesimpulan
Adapun kesimpulan yang dapat kami tarik dari pembahasan diatas adalah :
1. Sebuah sensor ultrasonic merupakan sensor jarak yang sering digunakan dalam dunia robotika untuk membuat robot dengan fungsi tertentu
2. Sensor ultrasonic bekerja dengan cara memantulkan sinyal berfrekuensi diatas 20 khz yang kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan berkisar 340 m/s. kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima ultrasonic. Dan akan diproses untuk menentukan jarak dengan rumus S = 340.t/2
3. Sensor Devantech SRF-04 bekerja dengan cara memancarkan sinyal ultrasonik sesaat dan menghasilkan pulsa output yang sesuai dengan waktu pantul sinyal ultrasonik sesaat kembali menuju sensor.
4.2 Saran
Saran yang dapat kami sampaikan adalah agar dalam semua pembaca dapat menjadikan makalah ini sebagai acuan untuk penambahan wawasan ilmu di bidangnya. Untuk itu, kami sangat mengharapkan adanya pengembangan atas pembuatan makalah ini.
http://atmelmikrokontroler.wordpress.com/2009/06/24/prinsip-kerja-rangkaian-sensor-ultrasonik/
http://muslimahelektro.blogspot.com/2010/03/sensor-jarak-menggunakan-sensor-ultra.html http://fahmizaleeits.wordpress.com/2010/10/30/sensor-jarak-srf04/