PERANCANG
ROB
Disusu Program Studi Sis
JU
FAKULT
UNIVE
NGAN DAN IMPLEMENTASI PURW
OBOT PEMBANTU ORANG CACAT
TUGAS AKHIR
usun untuk memenuhi syarat kelulusan pada Sistem Komputer Strata Satu Jurusan Tekni
Oleh
SENDY TIAPRAYOGA NIM: 10208104
Pembimbing Dr. Yusrila Y. Kerlooza
S. Indriani L, M.T
JURUSAN TEKNIK KOMPUTER
LTAS TEKNIK DAN ILMU KOMPUT
VERSITAS KOMPUTER INDONESI
BANDUNG
2012
RWARUPA
T
da
knik Komputer
iv
ABSTRAK
Manusia memiliki keinginan untuk membangun sebuah robot yang cerdas yang mampu membantu pekerjaan sehari-hari. Pekerjaan yang diperintahkan kepada robot tidak hanya pekerjaan yang sederhana tetapi sudah menjadi lebih kompleks dengan kemampuan yang khusus.
Kemampuan robot yang dapat membantu orang cacat menjadikan robot sebagai alat yang sangat membantu bagi orang cacat tersebut. Sebelumnya para penyandang cacat membutuhkan bantuan orang lain dalam melakukan pekerjaan sehari-harinya di rumah. Perkerjaan yang biasa dilakukan seorang penyandang cacat yang membutuhkan orang lain adalah menyediakan makanan.
Membuat sebuah purwarupa robot pembantu orang cacat memberikan sebuah solusi sebelum terciptanya robot yang sesungguhnya. Implementasi terhadap perkerjaan sebagai pembantu untuk menyajikan makanan merupakan tugas utama robot, walaupun berbentuk purwarupa. Robot akan melakukan semua perkerjaan dalam sebuah arena yang disimulasikan dengan sebuah ruangan dapur lengkap dengan perlengkapanya.
v
ABSTRACT
Humans have a desire to build an intelligent robot that can assist the human. The work that was ordered to the robot is not just a simple job but has become more complex with special abilities.
Robot capabilities that can help disabled people make the robot as a very helpful tool. Previously people with disabilities need help from others in performing their daily work at home. The usual work of a person with disabilities who require another person is providing the food.
Creating a prototype robot maid gives disabled people a solution before the creation of a real robot. Implementation of a job as a maid to serve the food is the main task of the robot, although only a prototype forms. Robots will do all the work in an area that is simulated with a furnished kitchen.
Kata Kunci: Prototype, Robot, Waiter
vi
KATA PENGANTAR
Segala puji syukur penulis panjatkan bagi Allah SWT, yang dengan rahmat dan karunia-Nya penulis dapat menyelesaikan laporan tugas akhir ini. Dalam penyelesaian tugas akhir ini penulis mendapat bimbingan dan dukungan dari banyak pihak, untuk itu penulis ingin mengucapkan terimakasih kepada: 1. Dr. Yusrila Yeka Kerlooza yang telah banyak memberikan saran, motivasi dan
bimbingan selama pelaksanaan tugas akhir di Laboratorium Divisi Robotika UNIKOM.
2. S. Indriani L, M.T selaku dosen pembimbing yang memberi koreksi dan arahan penulisan laporan ini.
3. Taufiq Nuzwir Nizar, M.Kom yang telah memberikan arahan dan masukan selama pelaksanaan tugas akhir.
4. Rodi Hartono, S.T yang memberikan banyak wawasan dan koreksi yang membangun selama pelaksanaan tugas akhir.
5. Rekan-rekan seperjuangan di Laboratorium Divisi Robotika Unikom, yang tidak kenal lelah dalam melakukan riset dan memberikan suasana kekeluargaan.
6. Kedua orang tua yang telah memberikan dukungan, doa dan kepercayaan kepada penulis selama menempuh pendidikan.
Semoga Allah SWT, membalas budi baik semua pihak dengan kebaikan dan pahala yang berlipat. Penulis menyadari bahwa laporan kerja praktek ini masih memiliki kelemahan untuk itu kritik dan saran sangat diharapkan.
Bandung, Agustus 2012
234536
5389
!"#$
%&'()*+("%$
,-./01/"#2,3$
,-./0//4. &,5$
,%-./0///0& 4,6$
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Perkembangan teknologi dan ilmu pengetahuan mendorong penggunaan robot untuk membantu manusia dalam beraktivitas. Terutama bagi orang cacat yang membutuhkan pertolongan. Robot dapat dimanfaatkan sebagai alat yang dapat membantu memenuhi kebutuhaan orang cacat. Misalnya untuk mengambilkan makanan. Sehingga manusia dapat dimudahkan hidupnya dengan teknologi robot.
1.2 Maksud dan Tujuan
Tujuan dari perancangan robot waiter ini mampu memindahkan piring berisi makanan dari satu tempat ke tempat lain. Harapan untuk kedepannya bisa membantu orang penyandang cacat untuk melayani dalam mengantarkan makanan tanpa melukai orang dan merusak barang-barang yang ada.
1.3 Batasan Masalah
Pengujian dilakukan untuk kehandalan mekanik dan algoritma robot, agar dapat memindahkan barang dari satu tempat ketempat lain dengan kecepatan relatif tinggi dan handal. Batasan penelitian yang di ambil dari peraturan pertandingan Robot Waiter di Trinity College tahun 2012 yaitu secara garis besar: 1. Ukuran robot, yang dibatasi panjang maksimal 30cm, lebar maksimal 30cm,
dan tinggi maksimal 30cm
2
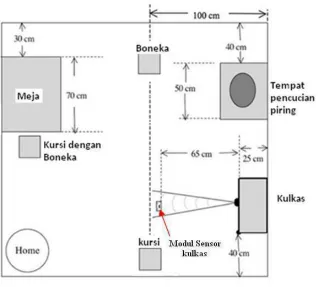
Gambar 1.1. Bentuk Arena
3. Terdapat sebuah kulkas yang sudah berisi piring pada 2 lantai rak, dengan ukuran rak bagian bawah 13 cm sampai 15 cm dari lantai dan rak bagian atas 27 sampai 29 cm dari lantai. Ukuran kulkasnya sendiri memiliki tinggi 41 sampai 42 cm, panjang 45 cm, dan lebar 25 cm, terdapat sebuah pintu yang dapat dibuka dan ditutup secara otomatis oleh robot.
4. Terdapat sebuah meja tempat menyimpan piring dengan ukuran panjang 70 cm, lebar 45 cm, dan tinggi 20 sampai 24 cm.
5. Semua tinggi rak dan meja dapat berubah pada setia saat percobaan 6. Tugas utama robot, yaitu:
a. Robot harus membuka pintu kulkas secara otomatis, agar bisa mengambil piring yang ada di dalam kulkas.
b. Robot harus mengambil piring yang tepat sesuai suara frekuensi yang diberikan.
3
d. Robot harus mengantarkan piring ke meja.
e. Robot bisa mengatarkan kembali piring yang tersimpan di meja ke sebuah tempat pencucian piring
7. Waktu yang diberikan dalam menyelesaikan tugas 4 menit, dan penambahan waktu 2 menit untuk kembali ke home.
8. Beberapa Kondisi yang membuat robot gagal diantaranya: a. Robot menyentuh pintu kulkas, boneka nenek, dan kursi. b. Robot salah mengambil piring.
c. Menjatuhkan piring.
d. Robot tidak berhasil mengembalikan piring yang tadi disimpan ke tempat pencucian piring
9. Posisi boneka nenek dan kursi acak yang sudah ditentukan, tetapi tidak mungkin menghalangi sensor kulkas.
10. Mode start.
a. Mode start standart tempatnya di pojok kiri bawah pada gambar 1 dan arah robot acak.
b. Mode start arbitrary posisi start random tidak akan lebih dekat dari tempat penyimpanan piring dan arah robot acak.
1.4 Metode Penelitian
Metode yang digunakan dalam penyusunan tugas akhir ini adalah sebagai berikut :
1. Studi literatur.
Merupakan metode pengumpulan data yang dilakukan dengan cara mencari dan membaca referensi, yang berhubungan dengan masalah yang menjadi topik tugas akhir tentang ilmu robotika.
2. Interview dan eksperimen.
4 3. Perancangan dan implementasi.
Perancangan modul rangkaian dilakukan dari simulasi perangkat lunak sehingga terbentuk sebuah sistem, yang kemudian diimplementasikan ke sebuah robot.
4. Pengujian dan analisis.
Untuk mengetahui kehandalan dari sistem yang terdapat pada robot tersebut dilakukan pengujian dengan cara mengambil data dari dan menganalisa hasil yang sudah diujikan.
1.5 Sistematika Penulisan
Sistematika dari penulisan laporan tugas akhir ini adalah : BAB I PENDAHULUAN
Bab 1 membahas tentang latar belakang masalah, maksud dan tujuan, metode penelitian, batasan masalah serta sistematika penulisan.
BAB II LANDASAN TEORI
Bab 2 membahas tentang teori-teori dasar dari hasil studi literatur yang berhubungan dengan perangkat keras dan perangkat lunak untuk merancang sebuah robot.
BAB III PERANCANGAN
Bab 3 membahas perancangan sebuah robot dibentuk dari perangkat keras dan perangkat lunak, pemilihan sensor yang digunakan dalam bernavigasi dan pembentukan algoritma pergerakan robot di arena. BAB IV PENGUJIAN DAN ANALISIS
Bab 4 membahas cara kerja robot lalu dilakukan pengujian dan menganaliasa data dari hasil pengujian.
BAB V KESIMPULAN DAN SARAN
50
BAB V
SIMPULAN DAN SARAN
5.1 Simpulan
Diperoleh beberapa kesimpulan dari pengujian dan analisa yang telah dilakukan, yaitu sebagai berikut:
1. Pengujian terhadap algoritma dasar dilakukan hingga mencapai nilai rata-rata keberhasilan 94% dari 700 kali percobaan.
2. Pengujian terhadap algoritma dengan mengubah posisi benda dilakukan hingga mencapai nilai rata-rata keberhasilan 98% dari 300 kali percobaan. 3. Pengujian terhadap algoritma dengan mengubah tinggi meja dan kulkas
dilakukan hingga mencapai nilai rata-rata keberhasilan 99% dari 400 kali percobaan.
4. Pengujian terhadap seluruh algoritma di anggap cukup ketika memiliki kesalahan kurang lebih 2% pada setiap percobaan.
5.2 Saran
Dalam perancangan ini masih mempunyai kekurangan dan jauh dari kesempurnaan, oleh kareana itu diperlukan penelitian lebih lanjut dan melengkapi kekurangan sebelumnya.
1. Penggunaan algoritma maping sebagai algorima untuk pergerakan robot sehingga tidak menggunkan sensor ultrasonik untuk proses pergerakan robot. 2. Teknik untuk mengenali piring diharapkan kedepanya dapat menggunakan
51
DAFTAR PUSTAKA
[1] Peraturan Pertandingan Robo Waiter 2012. Diakses tanggal 20 November 2011,dari www.trincoll.edu/events/robot/rules/Rules2012/rules_2012-final-1-a4.pdf.
[2] A.P. Malvino (2003). Prinsip-prinsip Elektronika, terjemahan Alb. Joko Santoso. Salemba Teknika.
[3] Brown, S., & Vranesic, Z. (2005). Fundamentals of Digital Logic with VHDL Design (Vol. II). New York: Mc Graw-Hill.
[4] Hamblen, J. O., Hall, T. S., & Furman, M. D. (2006). Rapid Prototyping of Digital Systems Quartus II Edition. New York: Springer.
[5] Kurniawan, Y. (2008). Algoritma Enkripsi Indonesia BC3. Diakses
tanggal 30 November 2011, dari
http://ysfk2008.wordpress.com/2008/05/09/algoritma-enkripsi-indonesia-bc3/.
[6] Perry, D. L. (2002). VHDL Programming by Example. New York, USA: McGraw-Hill Companies.
[7] Satoh, A., Morioka, S., Takano, K., & Munetoh, S. (2001, Januari 01). A Compact Rijndael Hardware Architecture. Diakses tanggal 10 Maret
2012, dari
http://www.springerlink.com/content/5942q6ytbga2kwbt/fulltext.pdf. [8] Smith, D. J. (1999). HDL Chip Design. Madison, USA: Doone
Publications.
[9] Stallings, W. (2005). Cryptography and Network Security Principles and Practices (Fourth Edition ed.). New Jersey: Prentice Hall.
DAFTAR RIWAYAT HIDUP
Nama : Sendy Tiaprayoga Jenis kelamin : Laki-laki
Tempat, tanggal lahir : Bandung, 30 April 2012
Agama : Islam
Status : Belum menikah
Alamat : Cijerah II B.6 Pepaya 98 Cimahi Selatan 40354 Handphone : 085860125924
E – mail : [email protected]
1. SDN CIJERAH 6 BANDUNG : 1996- 2003
2. SMPN 9 BANDUNG : 2003 - 2005
3. SMAN 17 BANDUNG : 2005 - 2008
4. UNIVERSITAS KOMPUTER NDONESIA
(Jurusan Teknik Komputer) Bandung : 2008 - 2012
1. Juara I Ribbon Climber Robogames 2011, San Mateo,California, USA 2. Juara II Robo Waiters Advance Level 2012, Hartford, Conecticut, USA DATA PRIBADI
PENDIDIKAN