Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
PENDEKATAN MODEL FUZZY GOAL PROGRAMMING
DALAM PENETAPAN PEMBOBOTAN PRIORITAS
DARI METODE ANALYTICAL HIERARCHY PROCESS (AHP)
SKRIPSI
RIDHA VERA HARTATI
060823024
PROGRAM STUDI SARJANA MATEMATIKA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
PENDEKATAN MODEL FUZZY GOAL PROGRAMMING
DALAM PENETAPAN PEMBOBOTAN PRIORITAS
DARI METODE ANALYTICAL HIERARCHY PROCESS (AHP)
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
RIDHA VERA HARTATI
060823024
PROGRAM STUDI SARJANA MATEMATIKA
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
PERSETUJUAN
Judul : PENDEKATAN MODEL FUZZY GOAL
PROGRAMMING DALAM PENETAPAN PEMBOBOTAN PRIORITAS DARI METODE ANALYTICAL HIERARCHY PROCESS (AHP)
Kategori : SKRIPSI
Nama : RIDHA VERA HARTATI
Nomor Induk Mahasiswa : 060823024
Program Studi : SARJANA (S1) MATEMATIKA Departemen : MATEMATIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN
ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di
Medan, Februari 2009 Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Drs.Sawaluddin, M.IT Drs. Marwan Harahap, M.Eng NIP.132 206 398 NIP.130 422 437
Diketahui oleh :
Departemen Matematika FMIPA USU Ketua,
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
PERNYATAAN
PENDEKATAN MODEL FUZZY GOAL PROGRAMMING DALAM PENETAPAN PEMBOBOTAN PRIORITAS DARI METODE ANALYTICAL
HIERARCHY PROCESS (AHP)
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Februari 2009
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Allah SWT, dengan limpahan dan karunia-Nya kertas kajian ini berhasil diselesaikan dalam waktu yang telah ditetapkan.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Abstrak
Metode Proses Analisis Hirarkis (Analytical Hierarchy Process-AHP) adalah alat bantu sistem pendukung keputusan yang dikenal luas untuk penyelesaian problem pengambilan keputusan multikriteria. Metode ini pada prinsipnya mensintesa perbandingan “judgment” pengambil keputusan yang berpasangan pada setiap level hirarki keputusan. Sehingga masih diperlukan penetapan bobot prioritas relatif setiap elemen keputusan. Bobot ini merepresentasikan intensitas preferensi atas suatu elemen keputusan. Untuk mendapatkan estimasi pembobotannya,biasanya digunakan metode eigenvector dari Saaty.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Abstract
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak v
Abstact vi
Daftar Isi vii
Daftar Tabel ix
Daftar Gambar x
Bab 1. Pendahuluan 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 3
1.3 Tujuan Penelitian 3
1.4 Kontribusi penelitian 3
1.5 Tinjauan Pustaka 3
1.6 Metode Penelitian 5
1.7 Jadwal Penelitian 6
Bab 2. Landasan Teori 7
2.1 Analytical Hirarchy Process (AHP) 7
2.1.1 Pengertian AHP 7
2.1.2 Prinsip Dasar AHP 8
2.1.3 Penghitungan Bobot Elemen dalam Metode AHP 11
2.2 Model Goal Programming 15
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
2.3.2 Fungsi Keanggotaan Fuzzy 25 2.3.3 Model Fuzzy Goal Programming untuk estimasi
penetapan prioritas 26 2.4 Pengenalan Program QM for Windows 27
Bab 3. Pembahasan 31
3.1 Penggunaan Metode AHP dalam perhitungan matematis 31 3.1.1 Menentukan bobot pada tiap elemen 32 3.1.2 Mencari nilai bobot untuk masing-masing elemen 33 3.2 Penyelesaian Pembobotan dengan AHP 34 3.3 Penyelesaian Pembobotan dengan Goal Programming 36 3.4 Penyelesaian Pembobotan dengan Fuzzy Goal Programming 40
Bab 4. Kesimpulan dan Saran 47
4.1 Kesimpulan 47
4.2 Saran 48
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
DAFTAR TABEL
Halaman Tabel 2. 1 Skala Penilaian Perbandingan Berpasangan 10 Tabel 2 .2 Matriks Perbandingan Berpasangan 11 Tabel 2. 3 Matriks Perbandingan Berpasangan dengan nilai intensitas 12
Tabel 2. 4 Indeks Random (RI) 14
Tabel 2. 5 Jenis-jenis Kendala Tujuan 18 Tabel 2. 6 Tabel Awal Goal Programming 21 Tabel 3.1 Contoh Matriks Perbandingan Berkebalikan 32 Tabel 3. 2 Penyelesaian Matriks Perbandingan Berkebalikan 32 Tabel 3. 3 Matriks Perbandingan Berkebalikan 34 Tabel 3. 4 Penyelesaian Matrike Perbandingan Berkebalikan 34 Tabel 3. 5 Matriks Penetapan Bobot Pada Tiap Elemen 34 Tabel 3. 6 Tabel Awal Goal Programming 38 Tabel 3. 7 Penyelesaian Goal Programming 38
Tabel 3. 8 Hasil Akhir 38
Tabel 3. 9 Tabel Awal Fuzzy Goal Programming 44 Tabel 3.10 Penyelesaian Fuzzy Goal Programming 44
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
DAFTAR GAMBAR
Halaman Gambar 2.1 Tampilan sementara (splash) dari program QM for Windows 28 Gambar 2.2 Tampilan Awal Program QM for Windows 28 Gambar 2.3 Pilihan modul yang tersedia pada program QM for Windows 29 Gambar 2.4 Baris menu (menu bar) sebelum dipilih modul tertentu 29 Gambar 2.5 Baris menu (menu bar) sesudah dipilih model tertentu 29 Gambar 2.6 Baris tool (toolbar) sebelum dipilih modul tertentu 29 Gambar 2.7 Baris tool (toolbar) sesudah dipilih modul tertentu 30
Gambar 2.8 Ruang Instruksi 30
Gambar 2.9 Baris utilitas (utility Bar – secara default
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Proses analisis kebijakan membutuhkan adanya kriteria sebelum memutuskan pilihan dari berbagai alternatif yang ada. Kriteria menunjukkan definisi masalah dalam bentuk yang konkret dan kadang-kadang dianggap sebagai sasaran yang akan dicapai. Setiap orang, tidak harus pimpinan dapat membuat keputusan akan tetapi dampak keputusan yang ditimbulkan berbeda-beda. Pada umumnya suatu keputusan dibuat dalam rangka untuk memecahkan permasalahan atau persoalan ( problem solving), setiap keputusan yang dibuat pasti ada tujuan yang akan dicapai. Adapun tujuan dari keputusan yang dibuat adalah untuk memuaskan atau memenuhi target atau paling tidak mendekati target yang telah ditentukan menurut skala prioritasnya masing-masing.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
AHP dikembangkan oleh Saaty pada pertengahan tahun 1970 (Saaty 1977). Pengembangannya mendasarkan pada kemampuan judgment (pertimbangan)manusia untuk mengkonstruksi persepsi secara hirarkis dari suatu persoalan keputusan multikriteria, juga untuk membuat perbandingan baik yang bersifat tangible (terukur) atau intangible(tak terukur) dari suatu kriteria, atribut atau sifat dari masing-masing elemen keputusan. Untuk bisa memperoleh penetapan bobot prioritas relatif dari setiap elemen keputusan, pendekatan AHP perlu mensintesis judgment pada setiap level hirarki keputusan. Kemudian pada setiap level tersebut, keseluruhan elemen keputusan dikonversikan menjadi keputusan tunggal dimana terjadi hubungan ketergantungan antar elemennya. Karenanya penetapan estimasi bobot prioritas relatif elemen keputusan pada setiap level hirarki menjadi langkah yang terpenting dan menentukan dalam metode AHP.
Umumnya saat pengambil keputusan menetapkan pembobotan relatif antar elemen keputusan dalam metode AHP dilakukan dalam evaluasi lingkungan keputusan yang samar dan subyektif. Misalnya saat harus menetapkan intensitas pembobotan kualitatif kriteria seperti ”sama” penting, ”cukup” penting, ”lebih” penting dan ”sangat ” penting. Dalam kondisi seperti itu tampaknya diperlukan suatu model keputusan yang mempertimbangkan fuzzyness (ketidakpastian) untuk memungkinkan menampung faktor imprecise (tidak jelas) dalam proses penetapan prioritas kriteria.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
level aspirasi dan prioritas goal pada suatu elemen keputusan sangat berkaitan dengan konsep fuzzy.
Dalam situasi keputusan seperti itu, validitas pendekatan goal programming untuk estimasi pembobotan relatif pada metode AHP dapat ditingkatkan kualitasnya dengan mengembangkannya menjadi tingkat model fuzzy goal programming. Maka penulis berkeinginan untuk menguraikan penyelesaian model fuzzy goal programming dalam penetapan pembobotan prioritas dari metode AHP.
1.2 Perumusan Masalah
Dari latar belakang masalah di atas maka perumusan masalahnya yaitu : menguraikan penyelesaian untuk model fuzzy goal programming dalam penetapan pembobotan prioritas dari metode AHP dengan menggunakan software QM for Windows version 2.0.
1.3 Tujuan Penelitian
Bertujuan untuk menerapkan suatu konsep dalam penetapan bobot prioritas dari metode AHP kemudian mengembangkannya menjadi model goal programming dan fuzzy goal programming.
1.4 Kontribusi Penelitian
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 Tinjauan Pustaka
Metode AHP menjelaskan tentang pemodelan permasalahan secara bertingkat yang terdiri dari kriteria dan alternatif. [5]
Penggunaan metode AHP untuk menyelesaikan masalah multiobjektif dan multikriteria berdasarkan perbandingan preferensi dari setiap elemen dalam hirarki.[7]
Penggunaan metode AHP dalam menganalisa faktor-faktor yang mempengaruhi pemilihan moda ke kampus.[8] Ditinjau dari berbagai faktor, alternatif jalan kaki dari pondokan merupakan alternatif terbaik (33,2%). Sedangkan carpool (16%) sedikit lebih rendah daripada penggunaan mobil pribadi (18%). Angkutan kampus antar jemput justru lebih rendah daripada carpool (12,4%).
Analisis pemilihan mitra LSM dan optimasi budgeting dengan menggunakan metode AHP dan goal programming. [1] Hasil analisa dengan menggunakan metode AHP yang diintegrasikan dengan goal programming diperoleh suatu model keputusan multikriteria. Digunakan untuk menyelesaikan problema dan optimasi dalam memilih mitra yang paling baik untuk diajak bekerja sama.
Masalah keputusan multikriteria dengan tujuan-tujuan yang saling terbentur dan tidak dapat dibandingkan diselesaikan dengan model Goal Programming. [3]
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Teori himpunan fuzzy dan notasi fuzzy.[9] Misalkan suatu himpunan fuzzy F didalam semesta wacana U dikarakteristikkan dengan fungsi keanggotaan µF yang bernilai dalam interval [0,1] atau µF: U [0,1].
Himpunan fuzzy dan fuzzy mathematical programming. [2] Adapun model fuzzy linier programming untuk kasus maksimisasi yaitu cTx ≥~z, Ax≤~b x≥0. Dan untuk kasus minimisasi yaitu cTx≤~z, Ax ≥~b x≥0.
Pendekatan fuzzy AHP dan fuzzy MCDM untuk pengalokasian fasilitas. Fuzzy AHP diterapkan untuk mendefinisikan bobot kriteria keputusan dari setiap evaluator. Fuzzy MCDM diterapkan untuk mensintesa keputusan kolektif. [6]
Panduan Program Aplikasi dengan menggunakan Software QM for Windows versi 2.0 dalam menyelesaikan persoalan model goal programming. [10]
1.5 Metode Penelitian
Secara umum, penelitian dilakukan dengan beberapa tahapan, yaitu: 1. Penetapan pembobotan prioritas dengan metode AHP.
2. Menguraikan masalah estimasi pembobotan relatif pada AHP untuk suatu level hirarki yang dinyatakan dalam bentuk Goal Programming.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
BAB 2
LANDASAN TEORI
2.1 Analytical Hierarchy Process (AHP)
Metode Analytical Hierarchy Process (AHP) merupakan salah satu metode pengambilan keputusan yang menggunakan faktor-faktor logika,instuisi, pengalaman,pengetahuan,emosi dan rasa untuk dioptimalisasikan dalam suatu proses yang sistematis. Metode AHP ini mulai dikembangkan oleh Thomas L. Saaty, seorang ahli matematika yang bekerja pada Universitas of Pittsburg di Amerika Serikat, pada awal tahun 1970-an.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
AHP mempunyai landasan aksiomatik yang terdiri dari :
1. Resiprocal Comparison, yang mengandung arti bahwa matriks perbandingan berpasangan yang terbentuk harus bersifat berkebalikan. Misalnya A adalah k kali lebih penting daripada B maka B adalah 1/k kali lebih penting dari A.
2. Homogenity, yang mengandung arti kesamaan dalam melakukan perbandingan. Misalnya, tidak dimungkinkan membandingkan jeruk dengan bola tenis dalam hal rasa, akan tetapi lebih relevan jika membandingkan dalam hal berat.
3. Dependence, yang berarti setiap jenjang (level) mempunyai kaitan (complete hierarchy) walaupun mungkin saja terjadi hubungan yang tidak sempurna (incomplete hierarchy).
4. Expectation, yang artinya menonjolkan penilaian yang bersifat ekspektasi dan preferensi dari pengambilan keputusan. Penilaian dapat merupakan data kuantitatif maupun yang bersifat kualitatif.
2.1.1 Prinsip Dasar AHP
Dalam menyelesaikan persoalan dengan metode AHP ada beberapa prinsip dasar yang harus dipahami antara lain :
1. Decomposition
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
incomplete kebalikan dari hirarki yang complete.Bentuk struktur dekomposisi yakni :
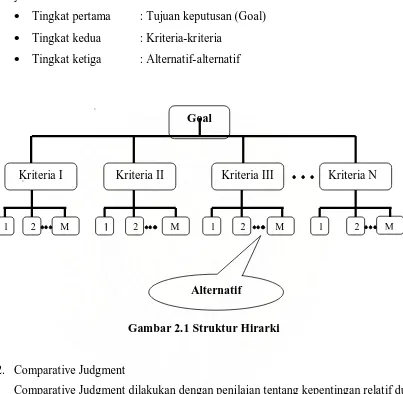
• Tingkat pertama : Tujuan keputusan (Goal)
• Tingkat kedua : Kriteria-kriteria
• Tingkat ketiga : Alternatif-alternatif
Gambar 2.1 Struktur Hirarki
2. Comparative Judgment
Comparative Judgment dilakukan dengan penilaian tentang kepentingan relatif dua elemen pada suatu tingkat tertentu dalam kaitannya dengan tingkatan diatasnya. Penilaian ini merupakan inti dari AHP karena akan berpengaruh terhadap urutan prioritas dari elemen-elemennya. Hasil dari penilaian ini lebih mudah disajikan dalam bentuk matriks pairwise comparisons yaitu matriks perbandingan berpasangan memuat tingkat preferensi beberapa alternatif untuk tiap kriteria . Skala prefrensi yang digunakan yaitu skala 1 yang menunjukkan tingkat yang
Goal
Kriteria I Kriteria II Kriteria III Kriteria N
2 1
2 1
1 2
1 2 M M M M
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
paling rendah (equal importance) sampai dengan skala 9 yang menunjukkan tingkatan yang paling tinggi (extreme importance).
3. Synthesis of Priority
Synthesis of Priority dilakukan dengan menggunakan eigen vector method untuk mendapatkan bobot relatif bagi unsur-unsur pengambilan keputusan.
4. Logical Consitency
Logical Consitency merupakan karakteristik penting AHP. Hal ini dicapai dengan mengagresikan seluruh eigen vektor yang diperoleh dari berbagai tingkatan hirarki dan selanjutnya diperoleh suatu vektor composite tertimbang yang menghasilkan urutan pengambilan keputusan.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
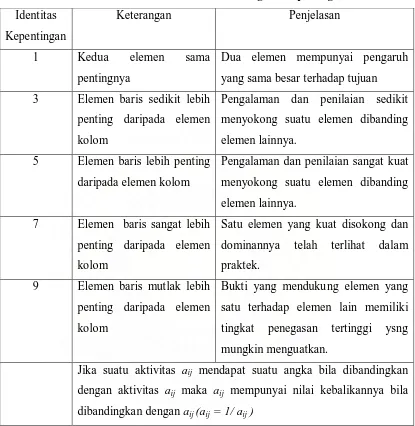
Tabel 2.1 Skala Penilaian Perbandingan Berpasangan Identitas
Kepentingan
Keterangan Penjelasan
1 Kedua elemen sama
pentingnya
Dua elemen mempunyai pengaruh yang sama besar terhadap tujuan
3 Elemen baris sedikit lebih penting daripada elemen kolom
Pengalaman dan penilaian sedikit menyokong suatu elemen dibanding elemen lainnya.
5 Elemen baris lebih penting daripada elemen kolom
Pengalaman dan penilaian sangat kuat menyokong suatu elemen dibanding elemen lainnya.
7 Elemen baris sangat lebih penting daripada elemen kolom
Satu elemen yang kuat disokong dan dominannya telah terlihat dalam praktek.
9 Elemen baris mutlak lebih penting daripada elemen kolom
Bukti yang mendukung elemen yang satu terhadap elemen lain memiliki tingkat penegasan tertinggi ysng mungkin menguatkan.
Jika suatu aktivitas aij mendapat suatu angka bila dibandingkan
dengan aktivitas aij maka aij mempunyai nilai kebalikannya bila
dibandingkan dengan aij (aij = 1/ aij )
2.1.2 Penghitungan Bobot Elemen Dalam Metode AHP
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
A1,A2,...,An maka hasil perbandingan secara berpasangan elemen-elemen operasi
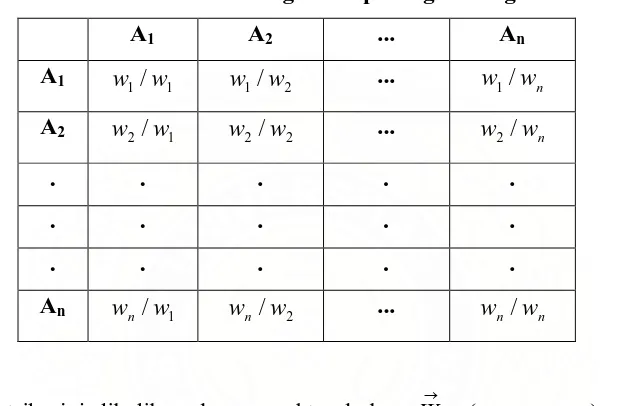
tersebut akan membentuk matriks perbandingan. Perbandingan berpasangan dimulai dari hirarki yang paling tinggi, dengan suatu kriteria digunakan sebagai dasar pembuatan perbandingan. Selanjutnya perhatikan elemen-elemen yang akan dibandingkan pada tabel 2.2 berikut ini :
Tabel 2.2 Matriks Perbandingan Berpasangan
A1 A2 ... An
A1 w1/ w1 w1/ w2 ... w /1 wn A2 w2 / w1 w2 / w2 ... w /2 wn
. . . . .
. . . . .
. . . . .
An wn / w1 wn / w2 ... w /n wn
Contoh matriks yang diperlihatkan dalam tabel 2.2 adalah sebuah matriks A berukuran (nxn) merupakan matriks perbandingan berpasangan. Dan diasumsikan terdapat n elemen yaitu w1,w2,...,wn yang akan dinilai secara perbandingan. Nilai (judgment) perbandingan secara berpasangan antara (w ,i wj) dapat direpresentasikan seperti matriks pada tabel 2.2.
n j
i untuk a
w w
ij j i
,..., 2 , 1 , =
= (1)
maka akan diperoleh hubungan persamaan berikut :
0 . j − i =
ij w w
a (2)
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 i
w dan wj = variabel keputusan untuk pembobotan relatif dari setiap elemen keputusan 1 dan j yang terkait pada suatu level hirarki tertentu.
ij
a = elemen-elemen yang terdapat dalam matriks dengan i,j = 1,2...,n
indeks Ω={(1,2),(1,3),...,(1,n),(2,3),...(2,n),...,(n-1,n)}sebagai himpunan perbandingan judgment yang ditetapkan secara berpasangan oleh pengambil keputusan. (1,j) =Setiap pasangan elemen keputusan yang menyatakan perbandingan
preferensi elemen keputusan Ai dengan elemen keputusan Aj.
Dari persamaan (1) bisa diperoleh hubungan berikut ini : 1
. =
i j ij
w w
a (3)
atau untuk keseluruhan elemen keputusan ϕ ={1,2,...,n}akan didapat :
n w w a
n
i i
j
ij =
∑
=1 . (4)dituliskan dalam bentuk persamaan lain sebagai :
i j ij w nw
a . = .
∑
(5)Dalam hal ini matriks perbandingan adalah matriks A dengan unsur-unsurnya adalah
aij dengan i,j = 1,2,...,n.Unsur-unsur matriks tersebut diperoleh dengan
membandingkan satu elemen operasi terhadap elemen operasi lainnya untuk tingkat hirarki yang sama. Matriks ini dikenal dengan sebutan Pairwise Comparison Judgment Matrix (PCJM).
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 →
W, dengan W→ = (w1,w2,...,wn),maka intensitas kepentingan elemen operasi A1
terhadap A2 yakni w /i wj yang sama dengan a12 sehingga matriks perbandingan dapat dinyatakan sebagai berikut :
Tabel 2.3 Matriks Perbandingan Berpasangan dengan Nilai Intensitas
A1 A2 ... An
A1 w1/ w1 w1/ w2 ... w /1 wn A2 w2/ w1 w2/ w2 ... w /2 wn
. . . . .
. . . . .
. . . . .
An wn / w1 wn/ w2 ... w /n wn
Bila matriks ini dikalikan dengan vektor kolom W→= (w1,w2,...wn) maka diperoleh hubungan :
AW→ = nW→ (6)
Dalam teori matriks, formula tersebut menyatakan bahwa : →
W = eigen vektor dari matriks A n = eigen value
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
= n n n n n n n n w w w n w w w w w w w w w w w w w w w w w w w w w 2 1 2 1 2 1 2 2 2 1 2 1 2 1 1 1 . . (7)
Variabel n pada persamaan diatas dapat digantikan secara umum dengan sebuah vektor λsebagai berikut :
AW→ = λW→ (8)
dimana :
λi = eigen value dengan λ = (λ1,λ2,...λn)
vektor W→ = eigen vektor
Karena matriks A adalah suatu matriks yang resiprokal dengan nilai aij =
ji
a
1
untuk
semua i maka :
∑
=n =i
i n 1
λ (9)
dimana:
λi = eigen value dengan λ = (λ1,λ2,...λn) untuk i = 1,2...,n
Apabila matriks A adalah matriks yang konsisten maka semua eigen value bernilai nol kecuali satu yang bernilai sama dengan n. Bila matriks A adalah matriks yang tidak konsisten, variasi kecil atas aij akan membuat nilai eigen value terbesar, λmaks dapat
dicari dengan persamaan berikut :
AW→ = λmaks
→
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 dimana :
I = matriks identitas
λmaks = nilai eigen value terbesar
Nilai vektor bobot W→dapat dicari dengan mensubsitusikan nilai λmaks ke dalam
persamaan tersebut.Dalam prakteknya, konsistensi tidak mungkin didapat. Nilai aij
akan menyimpang dari rasio w /i wj dan dengan demikian persamaan diatas tidak dapat dipenuhi. Deviasi maksimum dari n merupakan suatu parameter Consistency Index (CI) sebagai berikut :
1
−− =
n n
CI λmaks (11)
dimana :
CI = Consistency Index (Indeks Konsistensi)
λmaks = nilai eigen value terbesar
n = ordo matriks
Nilai CI tidak akan berarti bila tidak terdapat acuan untuk menyatakan apakah CI menunjukkan suatu matriks yang konsisten. Thomas L. Saaty memberikan acuan dengan melakukan perbandingan acak terhadap 500 buah sampel.
Thomas L.Saaty berpendapat bahwa suatu matriks yang dihasilkan dari perbandingan yang dilakukan secara acak merupakan suatu matriks yang mutlak tak konsisten. Dari matriks acak tersebut didapat pula nilai Consistensy Index, yang disebut dengan Random Index (RI).
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
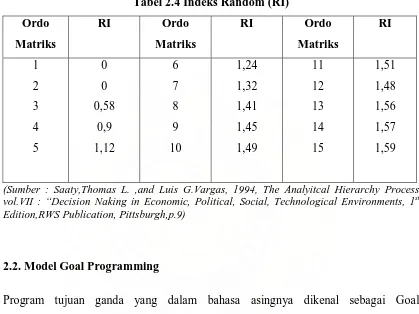
L. Saaty dengan menggunakan 500 sampel diperoleh nilai rata-rata indeks random (RI) untuk setiap ordo matriks tertentu sebagai berikut :
Tabel 2.4 Indeks Random (RI) Ordo
Matriks
RI Ordo
Matriks
RI Ordo
Matriks
RI
1 2 3 4 5
0 0 0,58
0,9 1,12
6 7 8 9 10
1,24 1,32 1,41 1,45 1,49
11 12 13 14 15
1,51 1,48 1,56 1,57 1,59
(Sumber : Saaty,Thomas L. ,and Luis G.Vargas, 1994, The Analyitcal Hierarchy Process vol.VII : “Decision Naking in Economic, Political, Social, Technological Environments, 1st Edition,RWS Publication, Pittsburgh,p.9)
2.2. Model Goal Programming
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Dalam keadaan dimana seseorang pengambil keputusan dihadapkan kepada suatu persoalan yang mengandung beberapa tujuan didalamnya, maka program linier tidak dapat membantunya untuk memberikan pertimbangan yang rasional. Karena program linier hanya terbatas pada analisis tujuan tunggal (single objective function). Oleh karena itu, maka persoalan tersebut memerlukan bantuan program tujuan ganda. Dunia nyata yang kita hadapi ini adalah dunia yang penuh dengan berbagai tujuan sebagai target dan sasaran. Oleh karena itu maka Goal Programming merupakan alat analisis yang tepat untuk itu. Goal Programming berusaha untuk meminimumkan deviasi berbagai tujuan, sasaran, atau target yang telah ditetapkan.
Dengan analisis Goal Programming maka kita mencoba untuk memuaskan atau memenuhi target paling tidak mendekati target yang telah kita tentukan menurut skala prioritasnya masing-masing.
Charnes dan Cooper yang mengembangkan Goal Programming sebagai pendekatan untuk menyelesaikan masalah yang infeasibility (tidak layak) pada program linier yang disebabkan oleh tujuan yang bertentangan. Ijiri dan Jaaskelainen kemudian melanjutkan dan melengkapinya sehingga dapat dipakai secara operasional. Lee mengkontribusikan menjadi ke tingkat yang lebih baik cara kerjanya,prestasi dari Goal Programming. Pada bagian P1 selalu lebih besar dari bagian prioritas ranking
yang lebih rendah P2. Ignizio membentuk dan mengaplikasikan bilangan bulat yang
tepat pada algoritma Goal Programming dan juga mampu bekerja dalam Program Non Linier.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
kanannya.Dalam Goal Programming terdapat dua tipe kendala yaitu kendala teknologi (technological constraint) yang merupakan permasalahan kapasitas sumber dan kendala lainnya yang bukan terhadap tujuan, kendala tujuan (goal constraint) yang mewakili atau menggambarkan target dari objek-objek dalam urutan prioritas.
2.2.1 Konsep Dasar dan Unsur-unsur Goal Programming
Agar memahami dengan baik bidang yang dipelajari, pembaca selalu harus mengerti istilah-istilah dan lambang-lambang khusus yang digunakan dalam bidang studi itu. Berikut ini adalah definisi dari beberapa istilah dan lambang yang biasa digunakan dalam Goal Programming.
Decision variables (Variable keputusan ) merupakan seperangkat variable yang tidak
diketahui (dalam model Linier Goal Programming dilambangkan dengan xj, dimana j
=1,2,...,n) yang akan dicari nilainya.
Right hand side values atau RHS (Nilai sisi kanan ) merupakan nilai-nilai yang
biasanya menunjukkan ketersediaan sumber daya (dilambangkan dengan bi) yang
akan ditentukan kekurangan atau kelebihan penggunaannya.
Goal (tujuan) merupakan keinginan untuk meminimumkan angka penyimpangan dari
suatu nilai RHS pada suatu goal constraint tertentu .
Goal Constraint (kendala tujuan) merupakan sinonim dari istilah goal equation, yakni
suatu tujuan yang diekspresikan dalam persamaan matematika yang memasukkan variabel simpangan.
Preemtive priority factor merupakan suatu sistem urutan yang dilambangkan dengan
Pk, dimana k = 1,2,...,k dan k menunjukkan banyaknya tujuan dalam model) yang
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Sistem urutan itu menempatkan tujuan-tujuan dalam susunan dengan hubungan sebagai berikut :
P1> P2 >>>Pk
P1 merupakan tujuan yang paling penting
P2 merupakan tujuan yang kurang penting dan seterusnya
Deviational variables (variabel simpangan) merupakan variabel-variabel yang
menunjukkan kemungkinan penyimpangan negatif dari suatu nilai RHS kendala tujuan (dalam model Linier Goal Programming dilambangkan dengan di−, dimana i = 1,2,...,m dan m adalah banyaknya kendala tujuan dalam model) atau penyimpangan positif dari suatu nilai RHS (dilambangkan dengan di+).Variabel-variabel ini serupa dengan slack variable dalam Linier Programming.
Differential weight (bobot) merupakan timbangan matematika yang diekspresikan
dengan angka kardinal (dilambangkan dengan wki dimana k = 1,2,...,k; i = 1,2,...,m)
dan digunakan untuk membedakan variabel simpangan i didalam suatu tingkat prioritas k.
Technological coefficient (koefisien teknologi) merupakan nilai-nilai numerik
(dilambangkan dengan aij) yang menunjukkan penggunaan nilai bi per unit untuk
menciptakan xj.
2.2.2 Unsur-unsur Goal Programming
Setiap model Linier Goal Programming paling sedikit terdiri dari tiga komponen, yaitu : sebuah fungsi tujuan, kendala-kendala tujuan, dan kendala non negatif.
1. Fungsi Tujuan
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
1. Minimumkan
∑
=+ − +
= m
i
i i d
d Z
1
Fungsi tujuan yang pertama digunakan jika variabel simpangan dalam suatu masalah tidak dibedakan menurut prioritas atau bobot.
2. Minimumkan Z P
(
di di)
untuk k Km i
k 1,2...,
1
= +
= − + =
∑
Fungsi tujuan yang kedua digunakan dalam suatu masalah dimana urutan tujuan diperlukan, tetapi variabel simapangan di dalam setiap tingkat prioritas memiliki kepentingan yang sama.
3. Minimumkan Z w P
(
di di)
untuk k Km i
k
ki 1,2...,
1
= +
= − + =
∑
Dalam fungsi tujuan ketiga, tujuan-tujuan diurutkan dan variabel simpangan pada setiap tingkat prioritas dibedakan dengan menggunakan bobot yang berlainan wki.
Jadi, fungsi tujuan yang digunakan akan tergantung pada situasi masalahnya.Perlu diperhatikan bahwa dalam model Linier Goal Programming tidak ditemukan variabel keputusan pada fungsi tujuan.
Penulis masih mencari, seperti yang dilakukan model Linier Programming, nilai
xj yang tidak diketahui, tetapi akan melakukannya secara tidak langsung melalui
minimisasi simpangan negatif dan positif dari nilai RHS kendala tujuan. Linier Programming mencari nilai solusi xj secara langsung melalui minimisasi
penyimpangan-penyimpangan dari nilai RHSnya. 2. Kendala Tujuan
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:32.595.110.523.150.447.2]USU Repository © 2009
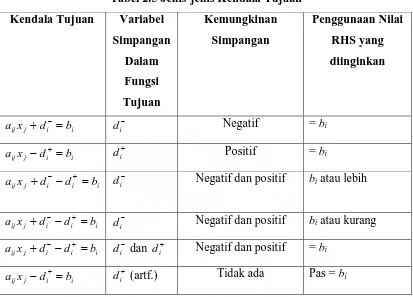
Tabel 2.5 Jenis-jenis Kendala Tujuan Kendala Tujuan Variabel
Simpangan Dalam Fungsi Tujuan
Kemungkinan Simpangan
Penggunaan Nilai RHS yang diinginkan
i i j
ijx d b
a + − = di− Negatif = bi
i i j
ijx d b
a − + = di+ Positif = bi
i i i j
ijx d d b
a + − − + = di− Negatif dan positif bi atau lebih
i i i j
ijx d d b
a + − − + = di− Negatif dan positif bi atau kurang i
i i j
ijx d d b
a + − − + = di− dan + i
d Negatif dan positif = bi
i i j
ijx d b
a − + = di+ (artf.) Tidak ada Pas = bi
Terlihat bahwa setiap jenis kendala tujuan harus punya satu atau dua variabel simpangan yang ditempatkan pada fungsi tujuan. Dimungkinkan adanya kendala-kendala yang tidak memiliki variabel simpangan. Kendala-kendala-kendala ini sama seperti kendala-kendala persamaan linier. Persamaan pertama pada tabel 2.5 maknanya serupa dengan kendala pertidaksamaan ≤ dalam masalah program linier maksimisasi. Persamaan kedua maknanya serupa dengan kendala pertidaksamaan ≥ pada masalah program linier minimisasi.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Ini serupa dengan kendala persamaan dalam Linier Programming, tetapi tidak menempel pada solusi karena dimungkinkan adanya penyimpangan negatif dan positif. Jika kendala persamaan dianggap perlu dalam perumusan model Linier Goal Programming, ia dapat dimasukkan dengan menempatkan sebuah artificial variabel
+ i
d , seperti pada persamaan keenam. Persamaan ketiga dan keempat memperbolehkan adanya penyimpangan positif dan negatif dari nilai RHSnya. Dalam kendala Linier Programming tak ada pembanding untuk persamaan ketiga dan keempat.
3. Kendala Non Negatif
Seperti dalam Linier Programming, variabel-variabel model Linier Programming biasanya bernilai lebih besar atau sama dengan nol. Semua model Linier Goal Programming terdiri dari variabel simpangan dan variabel keputusan, sehingga pernyataan non negatif dilambangkan sebagai xj, di−,
+ i
d ≥ 0
2.2.3 Kendala Struktural
Disamping ketiga komponen yang telah disebutkan itu, dalam model Linier Goal Programming kadang-kadang terdapat komponen yang lain, yaitu, kendala struktural artinya kendala-kendala lingkungan yang tidak berhubungan langsung dengan tujuan-tujuan masalah yang dipelajari. Variabel simpangan tidak dimasukkan dalam kendala ini, karena itu, kendala ini tidak diikut sertakan dalam fungsi tujuan.
Minimumkan
∑
(
)
=
− + +
= m
i
i i i d d
W Z
1
=
∑
=− − + + + m
i
i i i
i d W d
W
1
Syarat ikatan :
(Kendala Tujuan) j i i i m
i
ijx d d b
a + − − + =
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Untuk i = 1,2,...,m Kendala Technologi
∑
= ≤ ≥
n j
k j
kjx atau c
g
1
Untuk k = 1,2,...,p j = 1,2,...,n
Dan xj, di−, + i
d ≥ 0
di−+ di+= 0 dimana :
+ i
d dan di− : jumlah unit deviasi yang kekurangan (-) atau kelebihan (+) terhadap tujuan ( bi)
− +
i i danW
W : timbangan atau bobot yang diberikan terhadap suatu unit deviasi yang kekurangan atau kelebihan terhadap tujuan ( bi) aij : koefisien technologi fungsi kendala tujuan, yaitu yang
berhubungan dengan tujuan peubah pengambilan keputusan (xj)
xj : peubah pengambilan keputusan bi : tujuan atau target yang ingin dicapai gkj : koefisien teknologi fungsi kendala biasa ck : jumlah sumber daya k yang tersedia
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Berhubung tidak dapat mencapai deviasi plus dan deviasi minus dari tujuan atau target yang ditetapkan secara sekaligus atau simultan, maka salah satu dari variabel atau kedua-duanya akan menjadi nol (0),yang berarti target terpenuhi dengan sangat memuaskan dan tepat.
Tabel 2.6 Tabel Awal Goal Programming
1 2 3 4 5
1 2
3
Baris 1 : Variabel keputusan Xj dan variabel deviasi d1− Kolom 5 : Nilai sebelah kanan
Kolom 3 : Koefisien variabel keputusan aij
Kolom 4 : Matriks identitas menunjukkan pemasukan variabel deviasi negatif d1−
x X1 X2 . . . Xk … Xn d1 … d1 … dn Value WiPi Cb 0 0 ... 0 … 0 w1 … w1 … wn ∑wibi W1P1 d1+ a11 a12 … a1k … a1n 1 … 0 … 0 b1 W2P2 d2+ a21 a22 …. a2k … a2n 0 … 0 … 0 b2
... ... ……… …
W1P1 d1+ al1 al2 … alk … aln 0 … 1 … 0 b1
... ... ……….. …
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Kolom 1 : Faktor prioritas Pi dan bobot Wi untuk setiap variabel deviasi
positif (yakni variabel basis) dan memasukkan variabel deviasi artificial seperti ditampilkan dalam kolom 2.
Kolom 2 : Nilai total deviasi absolut, yang mewakili jumlah total deviasi dari semua tujuan untuk tiap tabel sebagai iterasi proses pendapatan.
Baris 2 : Vektor baris dari penunjuk nol pada proses perhitungan.
Baris 3 : Bobot Wi untuk setiap variabel deviasi yang dimasukkan dalam
fungsi objektif.
2.2.4 Model Keputusan Goal Programming
Oleh karenanya persamaan (2) dapat dinyatakan sebagai fungsi kendala goal dalam term model Goal Programming yaitu :
Ω ∈ =
− +
−w n p untuk i j
w
aij. j i ij ij 0 (, ) (12)
Variabel nij dan pij sebagai variabel deviasi baru dalam fungsi kendala goal. Kendala
persamaan (12) merepresentasikan penyimpangan, over atau underachievement dari suatu tingkat aspirasi goal yang ditetapkan. Tujuan pemodelannya adalah menemukan jawab pengambil keputusan yang mendekati konsisten. Artinya melakukan minimalisasi penyimpangan dari deviasi nilai pencapaian aspirasi subyektifnya. Oleh sebab itu, sebagai kriteria optimasi dari fungsi obyektif model ini adalah meminimumkan penjumlahan variabel deviasi nij dan pij.
Misal untuk suatu problem diperoleh solusi nij dan pij = 0, maka persamaan (2)
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
nilai nij dan pij ≥ 0, penetapan judgment pengambil keputusan kurang konsisten.
Kendala lain yang perlu ditambahkan dalam model :
1. Kendala untuk normalisasi pembobotan wi, penjumlahan keseluruhan bobot
prioritas ∑wi =1 .
2. Kendala ekivalensi penjumlahan variabel deviasi pada setiap kendala yang relevan, untuk menghindari munculnya dual degeneration.
2.2.5 Formulasi Model Keputusan Goal Programming
Secara umum estimasi pembobotan relatif pada AHP untuk suatu level hirarki dapat dinyatakan dalam problem Goal Programming sebagai berikut :
Minimize
∑
∑
Ω
∈ + ∈Ω
=
) ,
(i j (i,j ) ij
ij n
p
Z (13)
s.t
) , ,
(
0 .
ϕ
∈ Ω
∈
= − + −
j i dan j
i untuk
p n w w
aij j i ij ij
(14)
1
=
∑wi untuk i ∈ϕ (15)
wi ≥ 0 untuk i ∈ϕ (16)
nij,pij ≥ 0 untuk (i,j)∈Ω (17)
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
wi dan wj = variabel keputusan untuk pembobotan relatif dari setiap elemen
keputusan 1 dan j yang terkait pada suatu level hirarki tertentu. nij,pij = variabel deviasi baru dalam fungsi kendala goal.
Ai = prioritas judgment relatif dari pengmabil keputusan yang
berkaitan dengan perbandingan preferensi antar elemen keputusan 1 dan elemen keputusan j pada suatu level hirarki relevan.
Z = fungsi obyektif yang mengukur inkonsistensi judgment dari pengambil keputusan.
ϕ = elemen keputusan ϕ = {1,2,...n}
Ω = sebagai himpunan perbandingan judgment yang ditetapkan secara berpasangan oleh pengambil keputusan untuk
Ω={(1,2),(1,3),...,(1,n),(2,3),...(2,n),...,(n-1,n)}.
2.3 Model Fuzzy Goal Programming
Pemaparan teori himpunan fuzzy untuk masalah Goal Programming pertama kali dikemukakan oleh Hannan (1981) juga Ignizio (1982). Secara komprehensif berbagai aspek teori keputusan dengan menggunakan pendekatan fuzzy goal programming didiskusikan oleh Rubin dan Narasimhan (1984) juga Tiwari dkk (1986). Aplikasinya untuk pemodelan keputusan untuk berbagai aspek yang luas, misalnya untuk persoalan manajemen lingkungan diungkapkan oleh Tiwari dkk (1985).
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
kesederhanaannya dibandingkan model yang lain. Tiwari dkk (1987) merumuskan persoalan fuzzy goal programming sebagai berikut :
Cari nilai X
Agar memenuhi Gs(X)
~
< gs atau Gs(X)
~
> gs
untuk s = 1,2,...,m (18)
s.t.
AX ≥ b (19)
X≥ 0 (20)
dimana:
X = vektor variabel keputusan AX≥ b sebagai kendala sistem simbol
~
< dan ~
> menyatakan ketidaksamaan fuzzy kendala goal Gs(X)
~
< gs atau
Gs(X)
~
> gs.
Gs(X) merupakan fungsi goal
gs adalah goal yang menjadi aspirasi pengambil keputusan.
Persamaan fuzzy kendala goal mewujudkan aspirasi yang bersifat imprecise. Model fuzzy ini perlu diubah ke dalam persamaan crips dengan mensubstitusikan fungsi tersebut pada fungsi keanggotaan fuzzy liniernya yang relevan.
2.3.1 Fungsi Keanggotaan Fuzzy
Fungsi keanggotaan fuzzy linier untuk fungsi kendala goal yang diformulasikan Tiwari dkk (1987) adalah sebagai berikut :
1. Untuk problem fungsi kendala fuzzy goal Gs (X)
~
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
≤ ≤ ≤ −− ≥ = s s s s s s s s s s s i L X G jika g X G L jika L g L X G g X G jika ) ( 0 ) ( ) ( ) ( 1
µ (21)
dimana:
Ls adalah batas toleransi aspirasi terendah yang ditetapkan subyektif oleh pengambil
keputusan untuk fungsi kendala fuzzy goal Gs (X).
2. Untuk problem kendala fuzzy goal Gs (X)
~
< gs :
≤ ≤ ≤ − − ≤ = s s s s s s s s s s s i U X G jika U X G g jika g U X G U g X G jika ) ( 0 ) ( ) ( ) ( 1
µ (22)
dimana :
Us adalah batas tingkat aspirasi toleransi tertinggi yang ditetapkan subyektif oleh
pengambil keputusan.
Model keputusan ini adalah problem optimasi dalam bentuk linier programming yang dapat diselesaikan dengan algoritma standar. Model memiliki fungsi obyektif dengan kriteria tunggal yaitu maksimasi derajat keanggotaan µsuntuk keseluruhan aspirasi goal. Fungsi kendalanya bisa dalam bentuk crisp atau fuzzy. Misalkan untuk aspirasi goal : Gs(X)
~
> gs diperoleh model keputusan sebagai berikut
:
Maximize
∑
= = 1 ) ( s s
V µ µ (23)
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
( )
s s
s s
i
L g
L X G
−−
=
µ (24)
AX≤ b (25)
1
≤
s
µ (26)
m s
X,µs ≥0, =1,2,..., dimana :
V = fungsi obyektif yang mengukur inkonsistensi judgment dari pengambil keputusan.
AX≤ b sebagai kendala sistem.
µ = derajat keanggotaan fuzzy. Gs(X) = fungsi goal.
gs = goal yang menjadi aspirasi pengambil keputusan.
X = vektor variabel keputusan.
Ls = batas toleransi aspirasi terendah yang ditetapkan subyektif oleh pengambil
keputusan.
Us = batas tingkat aspirasi toleransi tertinggi yang ditetapkan subyektif oleh
pengambil keputusan.
2.3.2 Model Fuzzy Goal Programming Untuk Estimasi Penetapan Prioritas
Telah dipaparkan dari persamaan (13) sampai (17) pengembangan model goal programming untuk estimasi pembobotan prioritas relatif dari metode AHP.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
yang disusun tidak selalu bisa memenuhi sifat resiprokalitas dan transitivity dari matriks. Ketidakpastian ini akan berkaitan dengan konsep fuzzy.
Misalkan pengambil keputusan telah menetapkan batas level tertinggi toleransi intensitas jawab konsistensi tertinggi (Us) dan batas level toleransi nilai terendah (gs).
Nilai-nilai ini mencerminkan tingkat aspirasi subyektif. Keduanya diasumsikan berkorespodensi dengan intensitas jawab inkonsistensi yang masih bisa ditoleransi oleh pengambil keputusan. Saaty (1977,1980,1990,1994) merekomendasikan nilai rasio konsistensi (CR) sekitar < 10%.
Berdasarkan alasan itu, fungsi obyektif dari model goal dalam persamaan (13) dapat dipandang sebagai fungsi aspirasi goal (fungsi Gs) yang bersifat fuzzy. Fungsi
keanggotaan fuzzy linier didapat dengan melakukan substitusi pada setiap fungsi kendala goal (persamaan 13) ke dalam fungsi keanggotaan fuzzy yang relevan (persamaan 21).
Fungsi pencapaiannya berbentuk “additive goal programming” dengan criteria berupa maksimasi nilai keanggotaan fuzzy dengan tambahan pada kendala batas nilai maksimumnya (µs ≤1).
Pada setiap level hirarki dan untuk sejumlah s fungsi kendala goal diperoleh model fuzzy dalam bentuk cara linier programming biasa seperti berikut :
Maximize V =
∑
ss µ µ)
( (27)
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 s s j i ij j i ij s s g U n p U − + − = (
∑
,∈Ω) (∑
,∈Ω)µ (28)
untuk s = 1,2,…m 0 . j − i+ ij − ij =
ijw w n p
a
(29) untuk (i,j) ∈Ω dan i,j∈ϕ
) 33 ( ) , ( 0 . ) 32 ( ) ( 0 ) 31 ( ,..., 2 , 1 1 ) 30 ( 1 Ω ∈ ≥ ∈ ≥ = ≤ ∈ =
∑
j i untuk p n i untuk w m s untuk i untuk w ij ij i s i i ϕ µ ϕ dimana :V = fungsi obyektif yang mengukur inkonsistensi judgment dari pengambil keputusan.
wi dan wj = variabel keputusan untuk pembobotan relatif dari setiap elemen
keputusan 1 dan j yang terkait pada suatu level hirarki tertentu. nij,pij = variabel deviasi baru dalam fungsi kendala goal.
ij
a = elemen-elemen yang terdapat dalam matriks dengan i,j = 1,2...,n
µ = derajat keanggotaan fuzzy.
gs = batas toleransi aspirasi terendah yang ditetapkan subyektif oleh
pengambil keputusan.
Us = batas tingkat aspirasi toleransi tertinggi yang ditetapkan subyektif
oleh pengambil keputusan.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Ω = sebagai himpunan perbandingan judgment yang ditetapkan secara berpasangan oleh pengambil keputusan untuk
Ω={(1,2),(1,3),...,(1,n),(2,3),...(2,n),...,(n-1,n)}.
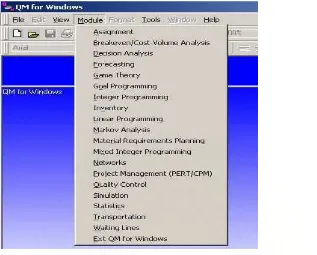
2.4 Pengenalan Program QM for Windows
Program QM for Windows merupakan paket program komputer untuk menyelesaikan persoalan-persoalan metode kuantitatif, manajemen sains atau riset operasi. QM for Windows merupakan gabungan dari program terdahulu DS dan POM for Windows, jadi jika dibandingkan dengan program POM for Windows modul-modul yang tersedia di QM for Windows lebih banyak. Namun ada modul-modul yang hanya tersedia di program POM for Windows, atau hanya tersedia di program DS for Windows dan tidak tersedia di QM for Windows.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Gambar 2.2 Tampilan sementara (splash) dari program QM for Windows
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:46.595.111.531.158.579.2]USU Repository © 2009
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:47.595.128.445.149.404.2]USU Repository © 2009
Gambar 2.4 Pilihan modul yang tersedia pada program QM for Windows
Gambar 2.5 Baris Menu (menu bar) sebelum dipilih Modul tertentu
Gambar 2.6Baris Menu (menu bar) sesudah dipilih Modul tertentu
[image:47.595.108.520.637.678.2]Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:48.595.107.528.143.213.2]USU Repository © 2009
Gambar 2.8 Baris Tool (toolbar) sesudah dipilih Modul tertentu
Gambar 2.9 Ruang instruksi
(tampilan ruang instruksi ini dapat diatur melalui menu View – Instruction - ...)
Gambar 2.10 Baris Utilitas (utility bar) – secara default terletak di bagian bawah
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
BAB 3
PEMBAHASAN
3.1 Penggunaan Metode AHP dalam Perhitungan Matematis
Kaidah pembobotan menyatakan bahwa :
1. Nilai bobot setiap kolom antara 0-1 atau 0% - 100% jika kita menggunakan presentase.
2. Jumlah total bobot harus bernilai 1 (100%) 3. Tidak ada bobot yang bernilai negatif (-)
Berikut ini adalah langkah-langkah yang digunakan dalam menentukan bobot dengan menggunakan AHP:
1. Menentukan Prioritas
Biasanya orang lebih mudah mengatakan bahwa elemen A lebih penting daripada elemen B, elemen B kurang penting dibanding dengan elemen C dan sebagainya, namun mengalami kesulitan menyebutkan seberapa penting elemen A dibandingkan elemen B atau seberapa kurang pentingnya elemen B dibandingkan dengan elemen C. Untuk itu kita perlu membuat tabel konversi dari pernyataan prioritas ke dlam angka-angka.
2. Membuat Tabel Perbandingan Prioritas
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
[image:50.595.119.523.221.297.2]membuat matriks perbandingan ke-4 elemen tersebut. Misalkan dari proses membandingkan antar elemen diperoleh nilai prioritas elemen sebagai berikut :
Tabel 3.1 Contoh Matriks Perbandingan Berkebalikan
ELEMEN A ELEMEN B ELEMEN C ELEMEN D
ELEMEN A 1 ½ 1/5 1/3
ELEMEN B 2 1 1/3 1
ELEMEN C 5 3 1 ½
ELEMEN D 3 1 2 1
Cara mengisinya adalah dengan menganalisa prioritas antara elemen baris dibandingkan dengan elemen kolom. Sesuai dengan persamaan matematika yang menyebutkan jika A:B = X, maka B:A =1/X. Contoh : jika prioritas elemen B (baris) : elemen A (kolom) = 2, maka prioritas elemen A (baris) : elemen B (kolom) = ½. Sehingga prioritas setiap elemen antara elemen A : elemen A = 1, elemen C : elemen A = 5, elemen C : elemen B = 3,elemen D : elemen A = 3, elemen D : elemen B =1, elemen D : elemen C = 2.
3.1.1 Menentukan Bobot Pada Tiap Elemen
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:51.595.112.525.161.236.2]USU Repository © 2009
Tabel 3.2 Penyelesaian Matriks Perbandingan Berkebalikan
ELEMEN A ELEMEN B ELEMEN C ELEMEN D
ELEMEN A 0.091 0.091 0.057 0.118
ELEMEN B 0.182 0.182 0.094 0.353
ELEMEN C 0.455 0.545 0.283 0.176
ELEMEN D 0.273 0.182 0.566 0.353
Mencari Nilai Bobot Untuk Masing-masing Elemen
Selanjutnya adalah mencari nilai bobot untuk masing-masing elemen. Caranya adalah dengan melakukan penjumlahan setiap nilai bobot prioritas pada setiap baris tabel dibagi dengan jumlah elemen. Sehingga diperoleh bobot masing-masing elemen adalah :
ELEMEN A = (0.091 + 0.091 + 0.057 + 0.118)/ 4 = 0.089 (8.9%) ELEMEN B = (0.182 + 0.182 + 0.094 + 0.353)/ 4 = 0.203 (20.3%) ELEMEN C = (0.455 + 0.545 +0.283 + 0.176 )/ 4 = 0.365 (36.5%) ELEMEN B = (0.273 + 0.182 + 0.566 + 0.353 )/ 4 = 0.343 (34.3%)
3.1.2 Perancangan Flowchart
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
[image:52.595.111.523.140.667.2]USU Repository © 2009
Gambar 3.1 Flowchart yang terjadi dalam penetapan bobot prioritas
Tampilkan Hasil
Perhitungan pembobotan dengan software QM for Windows
Perumusan fungsi dan kendala dalam suatu hirarki
Penambahan variable deviasi positif (di+)
dan deviasi negatif (di-)
Pengembangan dalam model fuzzy goal programming
Table Perbandingan Prioritas
Perhitungan CI dan CR
Mulai
Data Dasar
Penetapan Bobot
Pembobotan dengan AHP Pembobotan dengan Goal Programming
Penentuan Prioritas
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Pada bab ini akan dibahas pendekatan model fuzzy goal programming dalam penetapan pembobotan prioritas dari metode analytical hierarchy process (AHP). Berikut ini diberikan suatu matriks pairwise comparison (matriks perbandingan berkebalikan) yaitu :
aij =
1 3 / 1 1
3 1 3 / 1
1 3 1
3.2 Penyelesaian Pembobotan Dengan AHP
[image:53.595.160.439.387.536.2]Dalam menyelesaikan pembobotan dengan AHP maka yang pertama kali dilakukan adalah menentukan bobot pada tiap elemen dari matriks pairwise comparison (matriks perbandingan berkebalikan ).
Tabel 3.3 Matriks Perbandingan Berkebalikan W1 W2 W3
W1 1 3 1
W2 1/3 1 3
W3 1 1/3 1
∑ 7/3 13/3 5
Maka bobot pada tiap elemen dari matriks perbandingan berkebalikan tersebut sebagai berikut :
Tabel 3.4 Penyelesaian Matriks Perbandingan Berkebalikan
W1 W2 W3
W1 0.429 0.692 0.2
[image:53.595.148.440.615.687.2]Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
W3 0.429 0.077 0.2
∑ 1 1 1
[image:54.595.152.435.141.186.2]Selanjutnya adalah mencari nilai bobot untuk masing-masing elemen dengan melakukan penjumlahan setiap nilai bobot prioritas pada setiap baris tabel dibagi dengan jumlah elemen. Sehingga diperoleh hasilnya sebagai berikut :
Tabel 3.5 Matriks Penetapan Bobot pada tiap elemen
W1 W2 W3 Eigenvector utama
W1 0.429 0.692 0.2 0.440
W2 0.143 0.231 0.6 0.325
W3 0.429 0.077 0.2 0.235
∑ 1 1 1 1
dimana :
W1 = bobot relatif kriteria ke-1
W2 = bobot relatif kriteria ke-2
W3 = bobot relatif kriteria ke-3
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Selanjutnya nilai eigen maksimum (λmaks) didapat dengan menjumlahkan hasil perkalian jumlah kolom dengan vektor eigen. Nilai eigen maksimum yang diperoleh adalah sebagai berikut :
λmaks =
235 . 0 5 325 . 0 3 13 440 . 0 3 7
x x
x + +
= 1.027 + 1.408 + 1.175 = 3.61
Karena matriks berordo 3 (yakni terdiri dari 3 kriteria), maka nilai indeks konsistensi yang diperoleh adalah :
1
−− =
n n CI λmaks
2 3 61 .
3 −
=
CI = 0.305
Selanjutnya mencari nilai Rasio Konsistensi (CR) :
RI CI
CR =
Untuk n = 3, dengan menggunakan tabel Saaty diperoleh nilai RI = 0.58 maka :
RI CI CR =
58 . 0
305 . 0 =
CR = 0.525 dimana :
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
λmaks = nilai eigen value terbesar
n = ordo matriks
3.3 Penyelesaian Pembobotan Dengan Goal Programming
Secara umum estimasi pembobotan relatif pada AHP untuk suatu level hirarki dapat dinyatakan dalam problem Goal Programming sebagai berikut :
Minimize
∑
∑
Ω
∈ + ∈Ω
=
) ,
(i j (i,j ) ij
ij n
p Z
s.t
) , ,
(
0 .
ϕ
∈ Ω
∈
= − + −
j i dan j
i untuk
p n w w
aij j i ij ij
1
=
∑wi untuk i ∈ϕ wi ≥ 0 untuk i ∈ϕ
nij,pij ≥ 0 untuk (i,j)∈Ω
dimana :
wi dan wj = variabel keputusan untuk pembobotan relatif dari setiap elemen
keputusan 1 dan j yang terkait pada suatu level hirarki tertentu. Z = fungsi obyektif yang mengukur inkonsistensi judgment dari
pengambil keputusan. ij
a = elemen-elemen yang terdapat dalam matriks dengan i,j = 1,2...,n nij,pij = variabel deviasi baru dalam fungsi kendala goal.
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
Ω = sebagai himpunan perbandingan judgment yang ditetapkan secara berpasangan oleh pengambil keputusan untuk
Ω={(1,2),(1,3),...,(1,n),(2,3),...(2,n),...,(n-1,n)}.
Adapun penyelesaian untuk estimasi pembobotan relatif pada AHP untuk suatu level hirarki dalam problem Goal Programming yaitu :
aij =
1 3 / 1 1 3 1 3 / 1 1 3 1 ) ( ) ( ) ( )
( 1++ 1− + 2+ + 2− + 3++ 3− + 4++ 4− = d d d d d d d d Z
Min
s.t
1. aij.wj −wi+nij− pij =0
1 3 / 1 1 3 1 3 / 1 1 3 1 . 3 2 1 W W W - 3 2 1 W W W
+ 0
3 3 2 2 1 1 = − − − + − + − + − d d d d d d 5 1 3 / 13 3 / 1 3 / 7 1 5 3 3 / 13 1 3 / 7 3 / 1 5 1 3 / 13 3 3 / 7 1 . 3 2 1 W W W - 3 2 1 W W W
+ 0
3 3 2 2 1 1 = − − − + − + − + − d d d d d d 2 . 0 077 . 0 429 . 0 6 . 0 231 . 0 143 . 0 2 . 0 692 . 0 429 . 0 . 3 2 1 W W W - 3 2 1 W W W
+ 0
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009
0.429 W1 + 0.692 W2 + 0.2 W3 –W1 +( 1 1 ) + − −d
d = 0
0.143 W1 + 0.231W2 + 0.6 W3 – W2 + ( 2 2) + − −d
d = 0
0.429 W1 + 0.077 W2 + 0.2 W3 – W3 + ( 3 3) + − −d
d = 0
2.
∑
=1 si
W
W1 + W2 + W3 + ( 4 4 ) + − −d
d = 1
untuk Wi dan dj ≥ 0
untuk s = 1,2,3 Maka menjadi :
) ( ) ( ) ( )
( 1 1 2 2 3 3 4 4 − + − + − + − ++ + + + + + +
= d d d d d d d d Z
Min
s.t
1) – 0.571 W1 + 0.692 W2 + 0.2 W3 +( 1 1 ) + − −d
d = 0
2) 0.143 W1 – 0.769 W2 + 0.6 W3 + ( 2 2) + −−d
d = 0
3) 0.429 W1 + 0.077 W2 - 0.8 W3 + ( 3 3 ) + − −d
d = 0
4) W1 + W2 + W3 + ( 4 4) + − −d
d = 1
untuk Wi dan dj ≥ 0
dimana :
W1 = bobot relatif kriteria ke-1
W2 = bobot relatif kriteria ke-2
W3 = bobot relatif kriteria ke-3
+ +
4 1 ..., d
Ridha Vera Hartati : Pendekatan Model Fuzzy Goal Programming Dalam Penetapan Pembobotan Prioritas Dari Metode Analytical Hierarchy Process (AHP), 2009.
USU Repository © 2009 −
− 4 1 ..., d
d