PERANCANGAN DAN IMPLEMENTASI ALGORITMA
PURWARUPA ROBOT PENEMBAK OTOMATIS
(DRU116SGR-V13)
SKRIPSI
Diajukan untuk Menempuh Ujian Akhir Sarjana
Muhammad Yazid Al Qahar
10110030
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS TEKNIK DAN ILMU KOMPUTER
v
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... v
DAFTAR GAMBAR... viii
DAFTAR TABEL ... x
DAFTAR SIMBOL ... xi
DAFTAR LAMPIRAN ... xiii
BAB 1 PENDAHULUAN ... 1
1.1.
Latar Belakang Masalah ... 1
1.2.
Rumusan Masalah ... 2
1.3.
Maksud dan Tujuan ... 2
1.4.
Batasan Masalah ... 2
1.5.
Metodologi Penelitian ... 3
1.5.1. Metode Pengumpulan Data ... 3
1.5.2. Metode Pembangunan Perangkat Lunak ... 4
BAB 2
TINJAUAN PUSTAKA ... 5
2.1.
Kecerdasan Buatan ... 5
2.1.1. Pengertian Kecerdasan Buatan ... 5
2.1.2. Kelebihan Kecerdasan Buatan ... 6
2.1.3. Ruang Lingkup Kecerdasan Buatan ... 7
2.1.4. Representasi Pengetahuan ... 8
2.2.
Pengolahan Citra ... 9
2.2.1. Pengertian Pengolahan Citra ... 9
2.2.2. Pengenalan Warna Citra Warna RGB ... 10
2.2.3. Pengenalan Warna Citra Binary ... 11
2.2.4. Pengenalan Pola 2 Dimensi ... 12
vi
2.3.1. Motor Servo (Akuator) ... 14
2.3.2. Mikrokontroler ... 15
2.3.3. Airsoftgun ... 16
2.4.
Perangkat Lunak ... 17
2.4.1. Bascom AVR ... 17
2.4.2. QT Creator (C++) ... 19
BAB 3
ANALISIS DAN PERANCANGAN SISTEM ... 21
3.1.
Analisis Sistem ... 21
3.1.1. Analisis Masalah ... 21
3.1.2. Analisis Perangkat Keras ... 24
3.1.3. Analisis Perangkat Lunak ... 25
3.2.
Perancangan Perangkat Keras ... 33
3.2.1. Sistem Pergerakan Robot ... 33
3.2.2. Sensor Kamera ... 34
3.2.3. Senjata dan Laser ... 36
3.2.4. Diagram Blok Sistem Kendali ... 37
3.3.
Perancangan Perangkat Lunak ... 38
3.3.1. Representasi Pengetahuan Robot ... 38
3.3.2. Perancangan Algoritma Utama ... 40
3.3.3. Perancangan Algoritma Kalibrasi ... 41
3.3.4. Perancangan Algoritma Deteksi Target ... 42
3.3.5. Perancangan Algoritma Pendeteksian Laser ... 48
3.3.6. Perancangan Algoritma Tembak Target ... 50
3.3.7. Perancangan
Algoritma
Perhitungan
Derajat
Sudut
Trigonometri ... 52
3.3.8. Perancangan Algoritma Perhitungan Derajat Sudut Hasil
Kalibrasi ... 55
3.3.9. Kompleksitas Algoritma Deteksi Pola Target ... 56
3.3.10. Perancangan Struktur Menu ... 59
3.3.11. Perancangan Antarmuka Sistem Kendali ... 59
vii
4.1.
Implementasi Masalah ... 71
4.2.
Implementasi Perangkat Keras ... 73
4.2.1. Implementasi Sistem Pergerakan Robot ... 73
4.2.2. Implementasi Sistem Aktifasi Pelatuk (Trigger) Senjata ... 75
4.2.3. Implementasi Penempatan Sensor Kamera ... 76
4.2.4. Implementasi Penempatan Laser ... 76
4.3.
Implementasi Perangkat Lunak ... 77
4.4.
Implementasi Antarmuka Sistem ... 77
4.4.1. Implementasi Menu Utama ... 77
4.4.2. Implementasi Antarmuka Menu Kalibrasi Warna Target ... 78
4.4.3. Implementasi Antarmuka Kalibrasi Warna Target Gambar RGB79
4.4.4. Implementasi Kalibrasi Warna Target Gambar Binary ... 80
4.4.5. Implementasi Antarmuka Menu Kalibrasi Warna Laser ... 80
4.4.6. Implementasi Antarmuka Kalibrasi Warna Laser Gambar RGB81
4.4.7. Implementasi Antarmuka Kalibrasi Warna Laser Gambar
Binary ... 82
4.4.8. Implementasi Antarmuka Uji Senjata ... 82
4.4.9. Implementasi Antarmuka Kalibrasi Derajat Sudut ... 83
4.4.10. Implementasi Antarmuka Mulai Tembak ... 84
4.5.
Pengujian Purwarupa Robot ... 85
4.5.1. Rencana Pengujian Purwarupa Robot ... 85
4.5.2. Pengujian Sistem Pergerakan Robot ... 86
4.5.3. Pengujian Pendeteksian Objek Berdasarkan Ukuran Target .... 86
4.5.4. Pengujian Pendeteksian Objek Berdasarkan Kebersihan Target 87
4.5.5. Pengujian Akurasi Robot Berdasarkan Jarak Tembak ... 88
4.5.6. Pengujian Robot Berdasarkan Kecepatan Target Bergerak ... 89
4.5.7. Pengujian Algoritma Keseluruhan ... 90
BAB 5 KESIMPULAN DAN SARAN ... 93
94
DAFTAR PUSTAKA
[1] S. Kusumadewi, Artificial Intelligence (Teknik dan Aplikasinya). Yogyakarta:
Graha Ilmu, 2003.
[2] E. Martiana. (2010) Introduction to Altificial Intelligence. [Online].
http://lecturer.eepis-
its.edu/~entin/Kecerdasan%20Buatan/Presentasi/Minggu1%20-%20Introduction%20to%20Artificial%20Intelligence.pdf
[3] R. Munir, Pengolahan Citra Digital. Bandung: Informatika, 2004.
[4] I. T. Digital Library. (2011, Oct.) Pengolahan Warna. [Online].
http://digilib.ittelkom.ac.id/index.php?option=com_content&view=article&id=824
[5] A. Aries. (2013, Sep.) Segmentasi Citra. [Online].
http://aryn-genetika.blogspot.com/2013/01/segmentasi-citra.html
[6] A. Purnama. (2012, May) Elektronika Dasar. [Online].
http://elektronika-dasar.web.id/teori-elektronika/motor-servo/
[7] N. Kartika. (2013, Feb.) Mikrokontroler. [Online].
http://tikakartikanur.blogspot.com/2013_02_01_archive.html
[8] Liana. (2011, Aug.) Belajar QT Creator. [Online].
http://rumels.blogspot.com/2011/08/blajar-qt-creator-part-1.html
iii
KATA PENGANTAR
Syukur Alhamdulillah penulis panjatkan kehadirat Allah Subhanahu
Wata’ala yang telah memberikan kesehatan dan petunjuk sehingga dapat
menyelesaikan karya ilmiah yang
berjudul “Perancangan dan Implementasi
Algoritma Purwarupa Robot Penembak Otomatis (DRU116SGR-
V13)”. Tugas
Akhir ini disusun untuk memenuhi syarat kelulusan program sarjana.
Penulis menyadari bahwa karya ilmiah ini masih banyak kekurangan,
dikarenakan keterbasatan penulis, baik dalam penyajian materi dan sistematika
penulisan, pengetahuan dan pengalaman penulis. Oleh karena itu, kritik dan saran
yang membangun sangat penulis harapkan.
Dalam kesempatan ini penulis ingin menyampaikan rasa hormat dan
terima kasih yang sebesar-besarnya kepada:
1.
Kedua orang tua dari penulis sekaligus orang pertama yang menjadi
pembimbing bagi Penulis.
2.
Bapak Dr. Ir. Eddy Suryanto Soegoto selaku Rektor Universitas Komputer
Indonesia.
3.
Ibu Prof. Dr.Umi Narimawati, Dra., SE., M.Sc. selaku Wakil Rektor I Bidang
Akademik Universitas Komputer Indonesia..
4.
Ibu Prof. Dr. Hj. Aelina Surya, Dra. selaku Wakil Rektor III Bidang
Kemahasiswaan Universitas Komputer Indonesia.
5.
Bapak Prof. Dr. Ir. Denny Kurniadie, M.Sc. selaku Dekan Fakultas Teknik
iv
6.
Bapak Irawan Afriyanto, S.T., M.T. selaku ketua Program Studi Teknik
Informatika Universitas Komputer Indonesia.
7.
Bapak Dr. Yusrila Yeka Kerlooza selaku pembimbing yang telah mengajari
penulis dalam segala hal.
8.
Ibu Nelly Indriani W., S.Si., M.T. selaku dosen wali IF-1 sekaligus penguji
tugas akhir penulis.
9.
Bapak Taufiq Nuzwir Nizar, S.Kom., M.Kom. dan Bapak Rodi Hartono, S.T.
selaku pembimbing teknis yang telah memberikan arahan dan bimbingan
pada penulis.
10.
Teman-teman Divisi Robotika Unikom dan teman-teman kelas IF-1, penulis
ucapkan terimakasih atas bantuannya dan dukungannya bagi penulis.
Akhirnya, Penulis berharap semoga skripsi ini menjadi manfaat bagi dunia
sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang penulis
dalami.
Bandung, Maret 2014
DAFTAR RIWAYAT HIDUP
DATA PRIBADI
NIM
: 10110030
Nama Lengkap
: Muhammad Yazid Al Qahar
Jenis Kelamin
: Laki-laki
Tempat & Tgl Lahir
: Dumai, 05 Oktober 1992
Agama
: Islam
Alamat
: Jl. Jendral Sudirman Gg. Sadar No. 22 Dumai-Riau
No. Telepon
: 085720125901
PENDIDIKAN FORMAL
1998
–
2004
: SD Negeri 004 Dumai
2004
–
2007
: SMP Negeri 2 Dumai
2007
–
2010
: SMK Negeri 2 Dumai
2010
–
2014
: Program Studi Teknik Informatika
–
S1
Fakultas Teknik dan Ilmu Komputer
Universitas Komputer Indonesia
1
BAB 1
PENDAHULUAN
1.1.
Latar Belakang Masalah
Ketika terjadi perang antar dua negera atau lebih, maka senjata yang
canggih saja tidak cukup untuk memenangkan perang tersebut, namun setiap
militer dari masing-masing negara juga harus memiliki kesiagaan dan fokus penuh
untuk memantau keberadaan musuh. Kesiagaan dan fokus penuh tersebut sangat
sulit untuk didapatkan ketika kondisi fisik dari seorang militer sedang dalam
keadaan yang tidak baik, kelelahan, atau ketika diharuskan untuk menghadapi
musuh dengan jumlah yang sangat banyak.
Kolaborasikan antara senjata, robot dan
computer vision
dapat menjadi
solusi bagi permasalahan tersebut, dimana dapat diciptakan robot penembak yang
mampu bekerja secara otomatis yang didukung oleh
computer vision
sebagai indra
pengelihatannya. Robot ini dapat membantu kekurangan dari seorang militer, dan
juga dapat memperkecil resiko jatuhnya korban jiwa militer dalam perang.
Model objek yang harus dideteksi oleh robot terdiri dari dua bagian yaitu
target diam yang dianalogikan sebagai seorang musuh yang sedang diam dan
target bergerak yang dianalogikan sebagai seorang musuh yang sedang berjalan
atau berlari. Robot juga harus mampu membedakan objek yang harus ditembak
dan yang tidak boleh ditembak yang dianalogikan sebagai teman dan musuh, serta
robot juga harus mampu mengarahkan senjata dan menembak objek tersebut.
Pada penelitian kali ini, robot yang dibangun masih berbentuk
prototype
(purwarupa) dari robot dengan ukuran yang sebenarnya yang diharapkan dapat
diaplikasikan langsung di medan pertempuran. Baik senjata maupun target tembak
yang akan diuji juga akan berupa purwarupa, namun akan tetap memiliki aksi dan
2
1.2.
Rumusan Masalah
Berdasarkan latar belakang di atas, maka rumusan masalah dalam
penelitian ini adalah sebagai berikut :
1.
Bagaimana membuat algoritma yang mampu mendeteksi banyak objek
diam beserta posisi masing-masing objek.
2.
Bagaimana membuat algoritma yang mampu untuk mendeteksi banyak
objek bergerak beserta arah pergerakan dan kecepatan pergerakan objek
3.
Bagaimana membuat algoritma yang mampu mengarahkan tepat pada
objek yang diam maupun yang bergerak dan menembaknya.
1.3.
Maksud dan Tujuan
Berdasarkan identifikasi masalah di atas, maka maksud dari penelitian ini
adalah untuk membuat algoritma purwarupa robot penembak otomatis yang
mampu melaksanakan tugas selayaknya seorang militer, dan juga disesuaikan
dengan aturan pertanding Robogames 2013
–
USA. Sedangkan tujuan dari
penelitian ini adalah :
1.
Membuat algoritma pendeteksian banyak objek diam beserta posisi
masing-masing objek.
2.
Membuat algoritma pendeteksian banyak objek bergerak beserta arah
pergerakan dan kecepatan pergerakan objek.
3.
Membuat algoritma bagaimana mengarahkan senjata tepat pada objek
yang diam maupun yang bergerak dan menembaknya.
1.4.
Batasan Masalah
Batasan masalah diambil dari peraturan pertandingan Robogames 2013 di
San Mateo, USA pada kategori Autonomous Shooting Gallery Robot, yaitu secara
garis besar sebagai berikut:
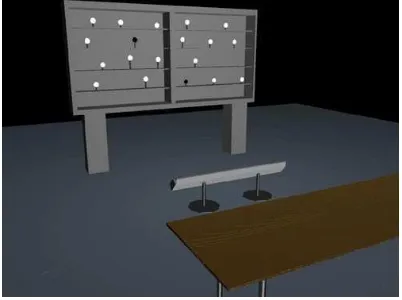
1.
Objek yang digunakan berupa objek berbentuk lingkaran berwarna putih
dan terdapat bercak-bercak dengan latar belakang hitam.
2.
Ukuran minimal objek adalah 1,27cm
3
4.
Area pendeteksian tempat objek berada berupa persegi dengan ukuran
150x150 cm
5.
Untuk benda bergerak, Arah pergerakan yang dapat dideteksi vertikal dan
horizontal tidak diagonal
6.
Kecepatan maksimal pergerakan adalah 30cm/s
7.
Faktor pencahayaan dibuat ideal.
Gambar 1.1 Arena Pengujian Robot
1.5.
Metodologi Penelitian
Metodologi yang digunakan dalam penulisan proposal penelitian ini
adalah sebagai berikut :
1.5.1.
Metode Pengumpulan Data
Pengumpulan data menggunakan teknik studi pustaka. Teknik studi
4
permasalahan dengan mengumpulkan teori-teori lain yang mendukung dan
membaca sumber seperti buku, skripsi, jurnal, maupun karangan yang berkaitan.
1.5.2.
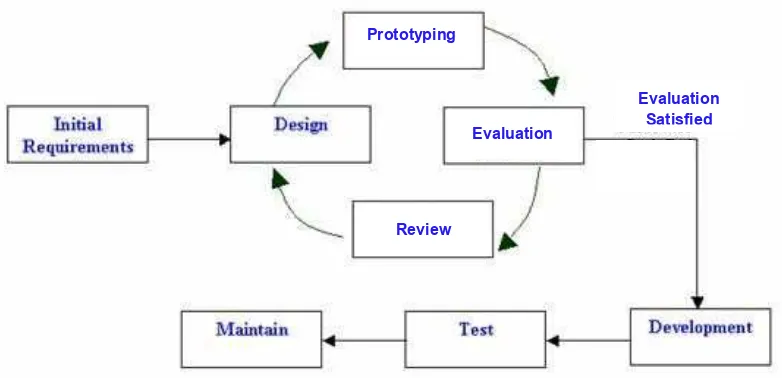
Metode Pembangunan Perangkat Lunak
Metode pengembangan perangkat lunak yang penulis gunakan dalam
penulisan skripsi ini adalah metode
prototyping
, yaitu suatu proses yang
digunakan untuk membuat model dari robot penembak otomatis secara bertahap.
Berikut ini gambar metode
prototype
:
Gambar 1.2 Prototyping Model
Prototyping
Review
Evaluation
93
BAB 5
KESIMPULAN DAN SARAN
5.1.
Kesimpulan
Berdasarkan uraian yang telah dibahas dalam bab sebelumnya, dapat
diambil kesimpulan sebagai berikut:
1.
Robot penembak otomatis (DRU116SGR-V13) dapat mendeteksi
banyak objek diam beserta posisi dari masing-masing objek tersebut.
2.
Robot penembak otomatis (DRU116SGR-V13) dapat mendeteksi
banyak objek bergerak beserta arah pergerakan dan kecepatan
pergerakan objek tersebut.
3.
Robot penembak otomatis (DRU116SGR-V13) dapat mengarahkan
senjata tepat pada objek diam maupun bergerak dan menembaknya.
4.
Robot penembak otomatis (DRU116SGR-V13) memiliki nilai
keberhasilan menjatuhkan banyak target dengan berbagai ukuran yang
mencapai 96% dari 1000 kali percobaan dan memiliki kompleksitas
algoritma sebesar O(n
3)
5.2.
Saran
Berdasarkan kesimpulan yang diuraikan sebelumnya, maka dapat diambil
saran-saran sebagai berikut:
1.
Robot penembak otomatis masih dapat dikembangkan untuk
implementasi kasus nyata.
2.
Masih dibutuhkan teknologi alternative lain yang mampu menggantikan
kekurangan pada kamera biasa untuk mengurangi keterbatasan jarak
pendeteksian terhadap objek.
3.
Masih dibutuhkan pengembangan teknologi kaki robot agar dapat
berputar 360 derajat.
4.
Pengembangan metode yang digunakan pada pengenalan pola dapat
menggunakan metode algorimta
machine learing
agar dapat mengenali
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
1Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
PERANCANGAN DAN IMPLEMENTASI ALGORITMA PURWARUPA
ROBOT PENEMBAK OTOMATIS (DRU116SGR-V13)
Muhammad Yazid Al Qahar
1, Yusrila Yeka Kerlooza
21
Teknik Informatika-Universitas Komputer Indonesia
Jl. Dipatiukur 112-114 Bandung
2
Pascasarjana Sistem Informasi-Universitas Komputer Indonesia
Jl. Dipatiukur 112-114 Bandung
E-mail : [email protected]
1, [email protected]
2ABSTRAK
Ketika terjadi perang antar dua negera atau lebih, maka senjata yang canggih saja tidak cukup untuk memenangkan perang tersebut, namun setiap militer dari masing-masing negara juga harus memiliki kesiagaan dan fokus penuh untuk memantau keberadaan musuh. Kesiagaan dan fokus penuh tersebut sangat sulit untuk didapatkan ketika kondisi fisik dari seorang militer sedang dalam keadaan yang tidak baik, kelelahan, atau ketika diharuskan untuk menghadapi musuh dengan jumlah yang sangat banyak.
Kolaborasikan antara senjata, robot dan computer vision dapat menjadi solusi bagi permasalahan tersebut, dimana dapat diciptakan robot penembak yang mampu bekerja secara otomatis yang didukung oleh computer vision sebagai indra pengelihatannya. Robot ini dapat membantu kekurangan dari seorang militer, dan juga dapat memperkecil resiko jatuhnya korban jiwa militer dalam perang.
Model objek yang harus dideteksi oleh robot terdiri dari dua bagian yaitu target diam dan target bergerak. Target diletakkan pada arena 1,5m x 1,5m, dengan warna target putih dan latar belakang berwarna hitam berdasarkan peraturan Robogames 2013 Shooting Gallery Robot di San Mateo, USA. Target memiliki ukuran yang berbeda-beda, ukuran target terbesar berdiameter 3inci (7,62cm) sedangkan ukuran terkecilnya berdiameter 1/2inci (1,27cm).
Robot penembak otomatis ini diuji dengan beberapa Algoritma yang dirancang kemudian dimplementasikan dan diujikan ke purwarupa robot penembak otomatis (DRU116SGR-V13). Pengujian dilakukan untuk mengukur kecepatan, ketepatan, keamanan dan kehandalan robot. Berdasarkan hasil pengujian, robot telah mampu mengenali objek, mengetahui posisi objek, mengarahkan senjata tepat pada objek, dan telah mampu melakukan aksi penembakan terhadap objek tersebut. Tingkat keberhasilan robot dalam menjalankan tugasnya mencapai 96% dari seribu kali percobaan.
Kata kunci : robot penembak otomatis, pengolahan citra, Shooting Gallery, Robogames 2013
1.
PENDAHULUAN
Model objek yang harus dideteksi oleh robot terdiri dari dua bagian yaitu target diam yang dianalogikan sebagai seorang musuh yang sedang diam dan target bergerak yang dianalogikan sebagai seorang musuh yang sedang berjalan atau berlari. Robot juga harus mampu membedakan objek yang harus ditembak dan yang tidak boleh ditembak yang dianalogikan sebagai teman dan musuh, serta robot juga harus mampu mengarahkan senjata dan menembak objek tersebut.
Pada penelitian kali ini, robot yang dibangun masih berbentuk prototype (purwarupa) dari robot dengan ukuran yang sebenarnya yang diharapkan dapat diaplikasikan langsung di medan pertempuran. Baik senjata maupun target tembak yang akan diuji juga akan berupa purwarupa, namun akan tetap memiliki aksi dan bentuk yang hampir menyerupai dari model yang sesungguhnya.
1.1.Batasan Sistem
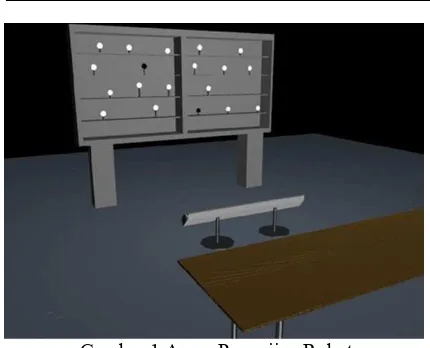
Batasan masalah diambil dari peraturan pertandingan Robogames 2013 di San Mateo, USA pada kategori Autonomous Shooting Gallery Robot, yaitu secara garis besar sebagai berikut:
1. Objek yang digunakan berupa objek berbentuk lingkaran berwarna putih dan terdapat bercak-bercak dengan latar belakang hitam.
2. Ukuran minimal objek adalah 1,27cm 3. Jarak maksimal pendeteksian adalah 700cm 4. Area pendeteksian tempat objek berada
berupa persegi dengan ukuran 150x150 cm 5. Untuk benda bergerak, Arah pergerakan yang
dapat dideteksi vertikal dan horizontal tidak diagonal
6. Kecepatan maksimal pergerakan adalah 30cm/s
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
2Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
Gambar 1 Arena Pengujian Robot
1.2. Kecerdasan Buatan
Kecerdasan buatan merupakan cabang ilmu pengetahuan berhubungan dengan pemanfaatan mesin untuk melakukan pekerjaan seperti dan sebaik yang dilakukan oleh manusia. [1] Makin pesatnya perkembangan teknologi menyebabkan adanya perkembangan dan perluasan lingkup yang
membutuhkan kehadiran kecerdasan buatan. Berikut merupakan lingkup utama kecerdasan buatan: [1]
a.Sistem pakar (expert system)
b.Pengolahan bahasa alami (natural language processing)
c.Pengolahan suara (speech recognize)
d.Robotika dan sistem sensor (robotic and sensory system)
e.Visi Komputer (computer vision)
f. Tutor Berbasis Komputer Cerdas (Intelligent computer-aided instruction)
g.Game Playing
1.3. Representasi Pengetahuan
Representasi pengetahuan merupakan suatu teknik untuk merepresentasikan pengetahuan yang diperoleh ke dalam suatu skema atau diagram tertentu sehingga dapat diketahui keterhubungan antara suatu data dengan data yang lain. Terdapat beberapa teknik representasi pengetahuan yang bisa digunakan dalam pengembangan sistem kecerdasan buatan, yaitu :
1. Logika
2. Diagram Semantik 3. Pohon
4. Sistem Produksi (Produstion System) 5. Frame
6. Naskah (Script)
Menurut Schank dan Abelson (1997), Script adalah representasi terstruktur yang menggambarkan urutan stereotip dari kejadian-kejadian dalam sebuah konteks khusus. Script mirip dengan frame, perbedaannya yaitu frame menggambarkan objek, sedangkan script menggambarkan urutan peristiwa. Dalam menggambarkan urutan peristiwa, script menggunakan serangkaian slot yang berisi informasi
tentang orang, objek dan tindakan-tindakan yang terjadi dalam suatu peristiwa. Script memiliki elemen-elemen tipikal sebagai berikut [1]:
a. Kondisi masukan, yaitu menggambarkan situasi yang harus dipenuhi sebelum terjadi suatu peristiwa yang ada dalam script. b. Track, yaitu mengacu kepada variasi yang
mungkin terjadi dalam script tertentu. c. Role, yaitu mengacu kepada orang-orang
yang terlibat dalam script.
d. Prop, yaitu mengacu kepada objek yang digunakan dalam urutan peristiwa yang terjadi.
e. Scene, yaitu menggambarkan urutan peristiwa aktual yang terjadi.
f. Hasil, yaitu kondisi yang ada sesudah peristiwa dalam script berlangsung.
Pada penelitian ini, penulis merepresentasikan pengetahuan robot penembak otomatis ke dalam bentuk naskah (script) karena sifatnya yang terstruktur dan sesuai dengan pengetahuan robot yang juga terstruktur.
1.4. Pengolahan Citra
Secara harafiah, citra (image) adalah gambar pada bidang dwimatra (dua dimensi). Ditinjau dari sudut pandang matematis, citra merupakan fungsi menerus (continue) dari intensitas cahaya pada bidang dwimatra. Sumber cahaya menerangi objek, objek memantulkan kembali sebagian dari berkas cahaya tersebut. Pantulan cahaya ini ditangkap oleh oleh alat-alat optik, misalnya mata pada manusia, kamera, pemindai (scanner), dan sebagainya, sehingga bayangan objek yang disebut citra tersebut terekam [3].
1.4.1. Pengertian Pengolahan Citra
Meskipun sebuah citra kaya informasi, namun seringkali citra yang kita miliki mengalami penurunan mutu (degradasi), misalnya mengandung cacat atau derau (noise), warnanya terlalu kontras, kurang tajam, kabur (blurring), dan sebagainya. Tentu saja citra semacam ini menjadi lebih sulit diinterpretasi karena informasi yang disampaikan oleh citra tersebut menjadi berkurang.
Agar citra yang mengalami gangguan mudah diinterpretasi (baik oleh manusia maupun mesin), maka citra tersebut perlu dimanipulasi menjadi citra lain yang kualitasnya lebih baik. Bidang studi yang menyangkut hal ini adalah pengolahan citra (image processing).
Pengolahan citra adalah pemrosesan citra, khususnya dengan menggunakan komputer, menjadi citra yang kualitasnya lebih baik. Sebagai contoh, citra burung nuri pada Gambar 2(a) tampak agak gelap, lalu dengan operasi pengolahan citra kontrasnya diperbaiki sehingga menjadi lebih terang dan tajam (b).
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
3Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
Gambar 2 (a) Citra burung nuri yang agak gelap, (b) Citra burung yang telah diperbaiki
kontrasnya
1.4.2. Pengenalan Warna Citra Warna RGB
Warna adalah spektrum tertentu yang terdapat di dalam suatu cahaya sempurna (berwarna putih). Nilai warna ditentukan oleh tingkat kecerahan maupun kesuraman warna. Nilai ini dipengaruhi oleh penambahan putih ataupun hitam [4].
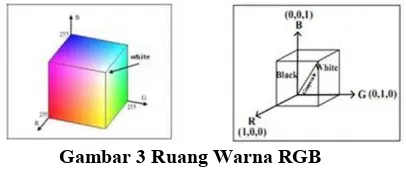
Penelitian memperlihatkan bahwa kombinasi warna yang memberikan rentang paling lebar adalah red (R), green (G) dan blue (B). Ketiga warna tersebut merupakan warna pokok yang biasa disebut RGB. Warna lain dapat diperoleh dengan mencampurkan ketiga warna pokok tersebut dengan perbandingan tertentu. Setiap warna pokok mempunyai intensitas sendiri dengan nilai maksimum 255 (8-bit). Misal warna kuning merupakan kombinasi warna merah dan hijau sehingga nilai RGB: 255 255 0.
RGB disebut juga ruang warna yang dapat divisualisasikan sebagai sebuah kubus seperti gambar 3, dengan tiga sumbunya yang mewakili komponen warna merah (red) R, hijau (green) G, biru (blue) B. Salah satu pojok alasnya yang Sistem Klasifikasi Jenis dan Kematangan Buah Tomat Berdasarkan Bentuk dan Ukuran serta Warna Permukaan Kulit Buah Berbasis Pengolahan Citra Digital berlawanan menyatakan warna hitam ketika R = G = B = 0, sedangkan pojok atasnya yang berlawanan menyatakan warna putih ketika R= G= B= 255 ( sistem warna 8 bit bagi setiap komponennya ).
Gambar 3 Ruang Warna RGB
Kamera yang digunakan pada robot penembak otomatis ini akan menangkap gambar dari objek dan kemudian merepresentasikannya kedalam bentuk citra warna RGB untuk kemudian dilakukan
pengolahan citra tersebut sehingga menghasilkan data-data objek yang dibutuhkan.
1.4.3. Pengenalan Warna Citra Binary
Citra biner (binary image) adalah citra yang hanya mempunyai dua nilai derajat keabuan: hitam dan putih seperti yang ditunjukkan pada gambar 4. Meskipun saat ini citra berwarna lebih disukai karena memberi kesan yang lebih kaya daripada citra biner, namun tidak membuat citra biner mati. Pada beberapa aplikasi citra biner masih tetap dibutuhkan, misalnya citra logo instansi (yang hanya terdiri atas warna hitam dan putih), citra kode batang (bar code) yang tertera pada label barang, citra hasil pemindaian dokumen teks, dan sebagainya [5].
Proses awal yang dilakukan dalam menganalisis objek di dalam citra biner adalah segmentasi objek. Proses segmentasi bertujuan mengelompokkan pixel-pixel objek menjadi wilayah (region) yang merepresentasikan objek. Ada dua pendekatan yang digunakan dalam segmentasi objek:
1. Segmentasi berdasarkan batas wilayah (tepi dari objek). Pixel-pixel tepi ditelusuri sehingga rangkaian pixel yang menjadi batas (boundary) antara objek dengan latar belakang dapat diketahui secara keseluruhan (algoritma boundary following).
2. Segmentasi ke bentuk-bentuk dasar (misalnya segmentasi huruf menjadi garis-garis vertikal dan horizontal, segmentasi objek menjadi bentuk lingkaran, elips, dan sebagainya).
Gambar 4 Citra Biner
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
4Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
1.4.4. Pengenalan Pola 2 Dimensi
Pengenalan pola adalah mengelompokkan data numerik dan simbolik (termasuk citra) secara otomatis oleh mesin (dalam hal ini komputer). Tujuan pengelompokan adalah untuk mengenali suatu objek di dalam citra. Manusia bisa mengenali objek yang dilihatnya karena otak manusia telah belajar mengklasifikasi objek-objek di alam sehingga mampu membedakan suatu objek dengan objek lainnya. Kemampuan sistem visual manusia inilah yang dicoba ditiru oleh mesin. Komputer menerima masukan berupa citra objek yang akan diidentifikasi, memproses citra tersebut, dan memberikan keluaran berupa deskripsi objek di dalam citra [3].
Contoh pengenalan pola misalnya citra pada Gambar 5 adalah tulisan tangan yang digunakan
sebagai data masukan untuk mengenali karakter ‘A’.
Dengan menggunakan suatu algoritma pengenalan pola, diharapkan komputer dapat mengenali bahwa
karakter tersebut adalah ‘A’.
Gambar 5 Pola 2 Dimensi
2.
ISI PENELITIAN
2.1 Analisis MasalahSistem yang akan dibangun harus mampu untuk menjatuhkan beberapa target tembak yang diletakkan pada arena yang berukuran 1,5m x 1,5m. Terdapat dua jenis target yaitu target berwarna putih yang merupakan target yang boleh dijatuhkan dan target berwarna hitam yang merupakan target yang tidak boleh dijatuhkan. Latar belakang dari arena target tembak akan diberikan berupa kain yang berwarna hitam sesuai peraturan Robogames 2013 Shooting Gallery Robot di San Mateo, USA.
Target disusun secara acak ketika perlombaan akan dimulai untuk memastikan bahwa robot dapat bekerja secara otomatis dalam pendeteksian targetnya. Masing – masing target memiliki ukuran yang berbeda-beda, ukuran target terbesar berdiameter 3inci (7,62cm) sedangkan ukuran
terkecilnya berdiameter 1/2inci (1,27cm). Jarak antar target (a) dan jarak antar baris (b) pada Gambar 6 serta jumlah baris tidak di akan diketahui sebelumnya sampai perlombaan akan dimulai. Gambaran dari bentuk arena target tembak dapat dilihat pada Gambar 6 dan ukuran dari target dapat dilihat pada Gambar 7.
Gambar 6 Arena Target Tembak
Gambar 7 Batas Ukuran Terbesar dan Terkecil Target
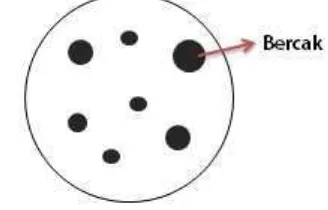
Target yang sediakan tidak akan selalu putih bersih, tetapi akan ada kemungkinan bercak-bercak yang mengotori warna dari target dikarenakan penggunaan target tersebut untuk percobaan atau perlombaan sebelumnya seperti pada Gambar 8.
Gambar 8 Bercak-bercak Pada Warna Target
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
5Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
target yang dapat bergerak secara horizontal seperti yang dapat dilihat pada Gambar 9
Gambar 9 Target Bergerak
Sistem ini ditujukan untuk dapat menembak semua target putih dan mengabaikan target hitam yang tersedia. Untuk setiap target putih yang ditembak jatuh maka peserta akan memberikan satu poin, tetapi untuk setiap target hitam yang ditembak jatuh maka 5 poin akan dikurangi dari total skor peserta. Pada akhir perlombaan, peserta yang memiliki poin tertinggi yang akan dijadikan juara. Jika terdapat poin yang sama, maka peserta yang memiliki waktu tersingkat untuk menjatuhkan semua target putih tersebut akan menjadi pemenang. Untuk dapat menembak target yang telah disediakan, maka dibutuhkan robot yang dapat melakukan beberapa fungsi seperti :
1. Membedakan target yang boleh ditembak dan yang tidak boleh ditembak
2. Membedakan target yang diam dan target yang bergerak
3. Mengarahkan senjata menuju setiap target yang boleh ditembak
4. Menembak target sampai benar – benar jatuh.
2.2. Sistem Pergerakan Robot
Sistem pergerakan robot yang dibutuhkan adalah sistem yang mengatur arah dari pergerakan robot. Sistem ini membutuhkan dua koordinat pergerakan
yaitu pergerakan vertikal (atas ↔ bawah) sumbu Y
yang ditunjukkan pada gambar 10 dan pergerakan
horizontal (kiri ↔ kanan) sumbu X yang
ditunjukkan pada gambar 11. Untuk pergerakan diagonal, maka sistem dapat melakukan dua pergerakan secara langsung yaitu pergerakan horizontal dan vertikal secara bersamaan.
Gambar 10 Arah Pergerakan Vertikal Robot
Gambar 11 Arah Pergerakan Horizontal Robot
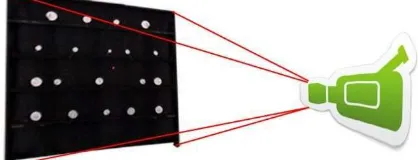
2.3.Sensor Kamera
Sensor kamera digunakan untuk mengambil gambar seluruh target dan kemudian gambar tersebut akan dikirimkan ke laptop untuk di olah sehingga menghasilkan data-data dari target seperti ukuran target, serta bentuk dan posisi dari masing-masing target. Untuk dapat penjangkau keseluruhan target pada area target yang diset dengan ukuran 1,5m x 1,5m tersebut, maka kamera harus diletakan ditengah-tengah dari area tersebut untuk menghasilkan gambar yang lebih ideal. Gambar 12 dapat menggambarkan jangkauan dari sensor kamera yang dirancang.
Gambar 12 Jangkauan Sensor Kamera
2.4. Senjata dan Laser
Pada robot penembak otomatis ini, senjata dan laser merupakan komponen yang sangat yang digunakan untuk menjatuhkan target-target yang telah disediakan. Senjata yang digunakan pada robot penembak otomatis ini adalah senjata berjenis Airsoftgun berlaras panjang (Rifle) yang merupakan replika senjata asli namun berukuran hampir sama dengan jenis senjata aslinya.
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
6Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
mempermudah melakukan kalibrasi laser terhadap senjata dan untuk memperkecil peluang sudut elevasi yang kemungkinan muncul karena adanya jarak antara arah senjata dan arah dari sinar laser. Gambar 13 dapat menggambarkan posisi laser terdapat senjata yang dirancang untuk robot penembak otomatis ini.
Gambar 13 Rancangan Senjata dan Laser
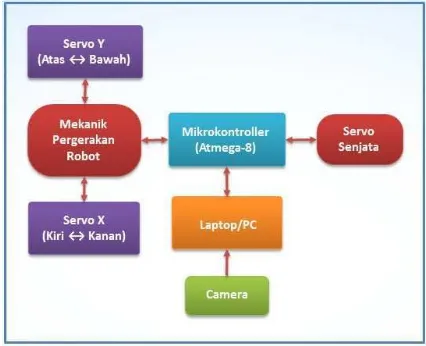
2.5. Diagram Blok Sistem Kendali
Diagram blok merupakan gambaran sejumlah komponen yang berperan dalam sistem kontrol. Tiap tiap blok terhubung satu sama lain melalui sinyal yang ditransmisikan. Diagram blok robot penembak otomatis (DRU116SGR-V13) dapat dilihat pada Gambar 14.
Gambar 14 Diagram Blok Sistem Kendali
Pada mekanik pergerakan robot, akan terdapat dua servo yaitu servo Y yang berfungsi sebagai pergerakan keatas dan kebawah senjata robot, dan servo X yang berfungsi sebagai pergerakan kekiri dan kekanan senjata robot. Mikrokontroler Atmega-8 akan mengontrol pergerakan pada mekanik pergerakan robot serta servo senjata yang berfungsi untuk mengaktifkan senjata ketika dibutuhkan. Mikrokontroler Atmega-9 juga akan dikontrol lagi oleh Laptop/PC yang akan memberikan perintah sesuai dengan hasil pengolahan data gambar yang diperoleh dari kamera.
2.6. Algoritma Utama
Algoritma utama merupakan algoritma keseluruhan dari tugas – tugas yang harus dilakukan oleh robot penembak otomatis. Algoritma ini dimulai dari tahap mengkalibrasi derajat pergerakan robot, kemudian mengambil gambar dari target yang tersedia dan melakukan pendeteksian target dan laser, hingga tahap yang terakhir adalah melakukan penembakan terhadap semua target yang tersedia. Secara umum, diagram alir algoritma utama ditunjukkan pada Gambar 15.
BEGIN
END Deteksi Target
Deteksi Laser Kalibrasi
Tembak Target
Gambar 15 Diagram Alir Algoritma Utama
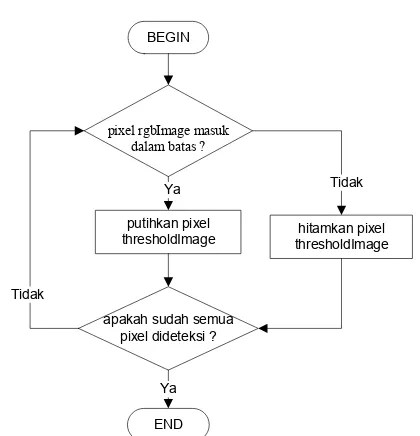
2.7. Prosedur Threshold
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
7Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
BEGIN
END
pixel rgbImage masuk dalam batas ?
putihkan pixel
thresholdImage thresholdImagehitamkan pixel
Ya Tidak
apakah sudah semua pixel dideteksi ?
Ya Tidak
Gambar 16 Diagram Alir Prosedur Threshold
2.8. Algoritma Pendeteksian Pola Target
Prosedur deteksi pola target digunakan untuk mendapatkan target yang sesuai dengan pola target yaitu pola bulat dari gambar binary yang sebelumnya telah dilakukan proses thresholding. Untuk mengenali target bulat, algoritma pendeteksi pola ini akan menggunakan prinsip 8 arah mata angin yang digunakan untuk mendapatkan 8 sudut dari target yang akan dicari. Setelah mendapatkan 8 sudut dari target tersebut, maka langkah selanjutnya yaitu menentukan target yang masuk dalam kategori bulat dengan cara menghitung tinggi, lebar dan diagonal dari target tersebut, jika setiap garis sama panjangnya, maka target tersebut ditetapkan sebagai target bulat yang dicari. Secara umum gambaran teknik pendeteksian pola target bulat ini dapat dilihat pada Gambar 17.
Gambar 17 Teknik Pendeteksian Pola Target Bulat
Secara umum diagram alir prosedur deteksi pola target ditunjukkan pada Gambar 18.
BEGIN
apakah pixel thresholdImage adalah
putih?
Apakah tinggi target = lebar target = diagonal target ? Cari Tinggi Target
Cari Lebar Target Ya
Cari Diagonal Target
Simpan Target Ya
Apakah sudah semua pixel terdeteksi ? Ya
Tidak
END Lanjut ke pixel
berikutnya
Tidak Tidak
Gambar 18 Diagram Alir Prosedur Deteksi Pola Target
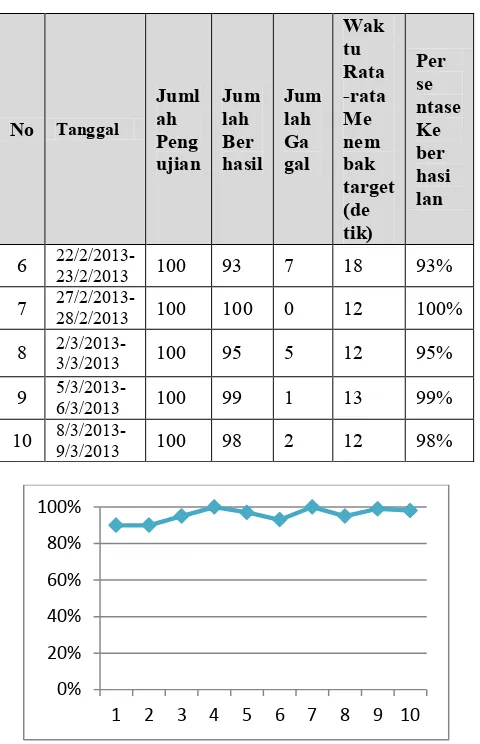
2.9. Pengujian
Pengujian dilakukan untuk meneliti ketepatan, kecepatan, keamanan dan kehandalan robot. Hasil pengujian robot yang dilakukan pada bulan Februari sampai dengan Maret 2013 dapat dilihat pada Tabel 1. Grafik keberhasilan robot dapat dilihat pada Gambar 19.
Tabel 1 Data Keberhasilan Robot
No Tanggal
Juml ah Peng ujian Jum lah Ber hasil Jum lah Ga gal Wak tu Rata -rata Me nem bak target (de tik) Per se ntase Ke ber hasi lan
1 3/2/2013-4/2/2013 100 90 10 35 90 %
2 6/2/2013-7/2/2013 100 90 10 30 90%
3 10/2/2013-11/2/2013 100 95 5 31,5 95%
4
13/2/2013-14/2/2013 100 100 0 28 100%
Jurnal Ilmiah Komputer dan Informatika (KOMPUTA)
8Edisi. .. Volume. .., Bulan 20.. ISSN : 2089-9033
No Tanggal
Juml ah Peng ujian Jum lah Ber hasil Jum lah Ga gal Wak tu Rata -rata Me nem bak target (de tik) Per se ntase Ke ber hasi lan
6 22/2/2013-23/2/2013 100 93 7 18 93%
7 27/2/2013-28/2/2013 100 100 0 12 100%
8
2/3/2013-3/3/2013 100 95 5 12 95%
9 5/3/2013-6/3/2013 100 99 1 13 99%
10 8/3/2013-9/3/2013 100 98 2 12 98%
Gambar 19 Grafik Keberhasilan Robot
Rata-rata keberhasilan sudah mencapai diatas 96% seperti yang ditunjukkan pada Gambar 19. Kegagalan terjadi dikarenakan tingkat kecerahan cahaya pada saat pengujian yang tidak selalu konstan yang sangat mempegaruhi tingkat ketajaman saat mengambil gambar dari kamera yang digunakan.
3.
PENUTUP
Berdasarkan penelitian, pengujian dan analisa data yang telah dilakukan, dapat diambil kesimpulan sebagai berikut:
1. Robot penembak otomatis (DRU116SGR-V13) dapat mendeteksi banyak objek diam beserta posisi dari masing-masing objek tersebut.
2. Robot penembak otomatis (DRU116SGR-V13) dapat mendeteksi banyak objek bergerak beserta arah pergerakan dan kecepatan pergerakan objek tersebut. 3. Robot penembak otomatis
(DRU116SGR-V13) dapat mengarahkan senjata tepat pada objek diam maupun bergerak dan menembaknya.
4. Robot penembak otomatis (DRU116SGR-V13) memiliki nilai keberhasilan menjatuhkan banyak target dengan berbagai ukuran yang mencapai 96% dari 1000 kali percobaan dan memiliki kompleksitas algoritma sebesar O(n3)
Berdasarkan kesimpulan yang diuraikan sebelumnya, maka dapat diambil saran-saran sebagai berikut:
1. Robot penembak otomatis masih dapat dikembangkan untuk implementasi kasus nyata.
2. Masih dibutuhkan teknologi alternative lain yang mampu menggantikan kekurangan pada kamera biasa untuk mengurangi keterbatasan jarak pendeteksian terhadap objek.
3. Masih dibutuhkan pengembangan teknologi kaki robot agar dapat berputar 360 derajat. 4. Pengembangan metode yang digunakan pada
pengenalan pola dapat menggunakan metode algorimta machine learing agar dapat mengenali objek lain yang berbeda tanpa merubah struktur program.
DAFTAR PUSTAKA
[1] S. Kusumadewi, Artificial Intelligence (Teknik dan Aplikasinya). Yogyakarta: Graha Ilmu, 2003.
[2] E. Martiana. (2010) Introduction to Altificial Intelligence. [Online]. http://lecturer.eepis-its.edu/~entin/Kecerdasan%20Buatan/Presentas
i/Minggu1%20-%20Introduction%20to%20Artificial%20Intelli gence.pdf
[3] R. Munir, Pengolahan Citra Digital. Bandung: Informatika, 2004.
[4] I. T. Digital Library. (2011, Oct.) Pengolahan
Warna. [Online].
http://digilib.ittelkom.ac.id/index.php?option=c om_content&view=article&id=824
[5] A. Aries. (2013, Sep.) Segmentasi Citra.
[Online].
http://aryn- genetika.blogspot.com/2013/01/segmentasi-citra.html
[6] A. Purnama. (2012, May) Elektronika Dasar. [Online]. http://elektronika-dasar.web.id/teori-elektronika/motor-servo/
[7] N. Kartika. (2013, Feb.) Mikrokontroler. [Online].
http://tikakartikanur.blogspot.com/2013_02_01 _archive.html
[8] Liana. (2011, Aug.) Belajar QT Creator. [Online].
http://rumels.blogspot.com/2011/08/blajar-qt-creator-part-1.html
[9] I. Sommerville, Software Engineering. United States: Pearson Education, 2011.
0% 20% 40% 60% 80% 100%